旋转矩阵中五保四
旋转矩阵公式法
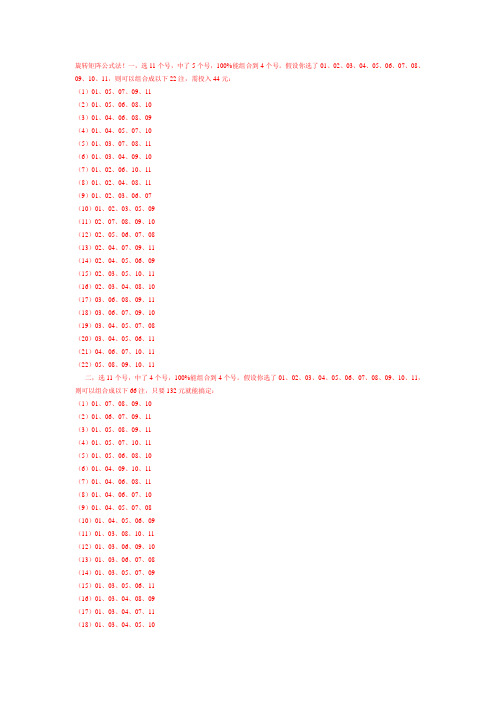
旋转矩阵公式法!一,选11个号,中了5个号,100%能组合到4个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下22注,需投入44元:(1)01、05、07、09、11(2)01、05、06、08、10(3)01、04、06、08、09(4)01、04、05、07、10(5)01、03、07、08、11(6)01、03、04、09、10(7)01、02、06、10、11(8)01、02、04、08、11(9)01、02、03、06、07(10)01、02、03、05、09(11)02、07、08、09、10(12)02、05、06、07、08(13)02、04、07、09、11(14)02、04、05、06、09(15)02、03、05、10、11(16)02、03、04、08、10(17)03、06、08、09、11(18)03、06、07、09、10(19)03、04、05、07、08(20)03、04、05、06、11(21)04、06、07、10、11(22)05、08、09、10、11二,选11个号,中了4个号,100%能组合到4个号。
假设你选了01、02、03、04、05、06、07、08、09、10、11,则可以组合成以下66注,只要132元就能搞定:(1)01、07、08、09、10(2)01、06、07、09、11(3)01、05、08、09、11(4)01、05、07、10、11(5)01、05、06、08、10(6)01、04、09、10、11(7)01、04、06、08、11(8)01、04、06、07、10(9)01、04、05、07、08(10)01、04、05、06、09(11)01、03、08、10、11(12)01、03、06、09、10(13)01、03、06、07、08(14)01、03、05、07、09(15)01、03、05、06、11(16)01、03、04、08、09(17)01、03、04、07、11(18)01、03、04、05、10(20)01、02、06、10、11 (21)01、02、06、08、09 (22)01、02、05、09、10 (23)01、02、05、06、07 (24)01、02、04、08、10 (25)01、02、04、07、09 (26)01、02、04、05、11 (27)01、02、03、09、11 (28)01、02、03、07、10 (29)01、02、03、05、08 (30)01、02、03、04、06 (31)02、08、09、10、11 (32)02、06、07、09、10 (33)02、05、07、09、11 (34)02、05、07、08、10 (35)02、05、06、08、11 (36)02、04、07、10、11 (37)02、04、06、09、11 (38)02、04、06、07、08 (39)02、04、05、08、09 (40)02、04、05、06、10 (41)02、03、07、08、09 (42)02、03、06、08、10 (43)02、03、06、07、11 (44)02、03、05、10、11 (45)02、03、05、06、09 (46)02、03、04、09、10 (47)02、03、04、08、11 (48)02、03、04、05、07 (49)03、07、09、10、11 (50)03、06、08、09、11 (51)03、05、08、09、10 (52)03、05、07、08、11 (53)03、05、06、07、10 (54)03、04、07、08、10 (55)03、04、06、10、11 (56)03、04、06、07、09 (57)03、04、05、09、11 (58)03、04、05、06、08 (59)04、07、08、09、11 (60)04、06、08、09、10 (61)04、05、08、10、11 (62)04、05、07、09、10(64)05、06、09、10、11(65)05、06、07、08、09(66)06、07、08、10、11三,选11个号,以每注6个号的小复式进行组合,中了5个号,100%能组合到5个号。
numpy 旋转矩阵
numpy 旋转矩阵numpy是一个广泛使用的Python库,用于科学计算和数据分析。
其中,旋转矩阵是一个非常重要的概念,用于描述在二维或三维空间中的旋转变换。
本文将深入介绍numpy中的旋转矩阵,并针对其相关知识点进行详细讲解。
一、旋转矩阵的定义旋转矩阵是一个二维或三维矩阵,用于描述在二维或三维空间中的旋转变换。
在二维空间中,旋转矩阵通常表示为:R = [[cos(theta), -sin(theta)], [sin(theta), cos(theta)]]其中,theta表示旋转的角度,cos(theta)和sin(theta)是角度theta的余弦和正弦值。
这个矩阵可以用来旋转向量(1,0)和(0,1)的基向量。
在三维空间中,旋转矩阵通常表示为:R = [[cos(theta)*cos(phi), -sin(phi), cos(phi)*sin(theta)],[cos(theta)*sin(phi), cos(phi), sin(theta)*sin(phi)],[-sin(theta), 0, cos(theta)]]其中,theta表示绕z轴的旋转角度,phi表示绕y轴的旋转角度,cos和sin函数分别表示余弦和正弦函数。
这个矩阵可以用来旋转x、y、z三个坐标轴。
旋转矩阵具有一些重要的性质,包括:1、正交性旋转矩阵在二维和三维空间中都是正交矩阵,即其每一列和每一行均为单位向量,并且两两正交。
2、逆矩阵旋转矩阵在二维和三维空间中都是可逆矩阵,并且其逆矩阵等于其转置矩阵。
3、行列式旋转矩阵在二维和三维空间中的行列式都是1,因此它们是体积不变的矩阵。
4、连续性旋转矩阵是连续的,即在一个角度范围内,任意两个角度间的旋转矩阵都可以通过插值获得。
numpy提供了简单而强大的API来生成和使用旋转矩阵。
下面是一些常见的numpy旋转矩阵操作:1、numpy.eye该函数生成一个单位矩阵,可用于初始化旋转矩阵。
旋转变换(一)旋转矩阵

旋转变换(一)旋转矩阵1. 简介计算机图形学中的应用非常广泛的变换是一种称为仿射变换的特殊变换,在仿射变换中的基本变换包括平移、旋转、缩放、剪切这几种。
本文以及接下来的几篇文章重点介绍一下关于旋转的变换,包括二维旋转变换、三维旋转变换以及它的一些表达方式(旋转矩阵、四元数、欧拉角等)。
2. 绕原点二维旋转首先要明确旋转在二维中是绕着某一个点进行旋转,三维中是绕着某一个轴进行旋转。
二维旋转中最简单的场景是绕着坐标原点进行的旋转,如下图所示:如图所示点v 绕原点旋转θ角,得到点v’,假设 v点的坐标是(x, y) ,那么可以推导得到v’点的坐标(x’, y’)(设原点到v的距离是r,原点到v点的向量与x轴的夹角是ϕ )x=rcosϕy=rsinϕx′=rcos(θ+ϕ)y′=rsin(θ+ϕ)通过三角函数展开得到x′=rcosθcosϕ−rsinθsinϕy′=rsinθcosϕ+rcosθsinϕ带入x和y表达式得到x′=xcosθ−ysinθy′=xsinθ+ycosθ写成矩阵的形式是:[x′y′]=[cosθsinθ−sinθcosθ]∗[xy]尽管图示中仅仅表示的是旋转一个锐角θ的情形,但是我们推导中使用的是三角函数的基本定义来计算坐标的,因此当旋转的角度是任意角度(例如大于180度,导致v’点进入到第四象限)结论仍然是成立的。
3. 绕任意点的二维旋转绕原点的旋转是二维旋转最基本的情况,当我们需要进行绕任意点旋转时,我们可以把这种情况转换到绕原点的旋转,思路如下:1. 首先将旋转点移动到原点处2. 执行如2所描述的绕原点的旋转3. 再将旋转点移回到原来的位置也就是说在处理绕任意点旋转的情况下需要执行两次平移的操作。
假设平移的矩阵是T(x,y),也就是说我们需要得到的坐标v’=T(x,y)*R*T(-x,-y)(我们使用的是列坐标描述点的坐标,因此是左乘,首先执行T(-x,-y))在计算机图形学中,为了统一将平移、旋转、缩放等用矩阵表示,需要引入齐次坐标。
旋转矩阵原理及在彩票投注中的运用
旋转矩阵原理及在彩票投注中的运用经过数学界多年的研究,人们找出了一种组合号码的全新方法——被称之为旋转矩阵。
用此方法进行投注的话,轮次矩阵中出现的情况是永远不会出现的。
其意义在于,如果你所选择的多个号码中包括了开奖的号码,那么你只要用很少的投入,就能够得到一个相应级别的中奖保证。
具体你的投入的多少与你选择号码的个数、包含中奖号码的个数以及你所期望的中奖保证相关。
实际上,旋转矩阵不是教你去如何选号的,而是教你如何科学地组合号码。
相比于复式投注、轮次矩阵等组合号码的方法,旋转矩阵有着投入低、中奖保证高的优点。
举个例子讲,10个号码的7,六型旋转矩阵的含义就是,你选择了10个号码,如果其中包含了7个中奖号码,那么运用该矩阵提供的8注号码,你至少有一注中对6个号码的奖。
本矩阵只要投入16元,而相应的复式投注需要投入240元。
大家知道,用10个号码,只购买其中的8注,如果你胡乱组合的话,即使这10个号码中包含有7个中奖号码,你也很可能只中得一些小奖。
而运用旋转矩阵的话,就可以得到一个对6个号码的奖的最低中奖保证。
从纯数学角度看,旋转矩阵属于一个典型的组合设计问题,严格地讲,是属于组合设计中的覆盖设计的问题。
如何才能找到最少的注数以保证全面的覆盖是一个历时已久的数学难题,与旋转矩阵相关的数学问题还有很多,比如填装设计、斯坦纳设计、t-设计等等,这些问题都是数学界长期以来的难题,在军事上和医药实验上都有着广泛的运用。
当然把高深的数学原理运用在彩票这一极其通俗的事物上,也是一个历史的玩笑。
好在对于一般运用旋转矩阵的彩民来讲,其背后高深的数学原理一点也不会成为运用的障碍,因为我们需要的只是知道如何运用就够了。
目前,对旋转矩阵的解法,数学界还没有找到一个通用的公式,大部分的设计即使用最先进的超级电脑也很难求出,全盘搜索的算法耗用的时间将会是一个天文数字。
好在人们找到了一种全新的模拟算法,它大大提高了求解覆盖设计的速度,但它不能保证找到的覆盖设计一定是最小的覆盖设计。
什么是旋转矩阵?

什么是旋转矩阵?一、名词解释【中6保5】比如你选择的10个红球复式中了6红,则经过旋转矩阵拆分后,一定能中5红,当然,仍有机会中6红;【中6保4】比如你选择的10个红球复式中了(4或5或6)红,则经过旋转矩阵拆分后,一定能中4红,当然,仍有机会中(5或6)红;【中5保5】比如你选择的10个红球复式中了(5或6)红,则经过旋转矩阵拆分后,一定能中5红,当然,仍有机会中6红;【中5保4】比如你选择的10个红球复式中了(4或5)红,则经过旋转矩阵拆分后,一定能中4红,当然,仍有机会中5红;二、旋转矩阵的由来旋转矩阵的核心就是用比较少的钱,合理组合彩票号码,提供中奖率。
美国人Gail Howard发明的'旋转矩阵'组合法造就了74位大奖得主,这是一个算法很复杂且很有特色的组合方法。
这种方法的特点是:怎样花很少的钱将选中的号码组合在一起而减少遗漏。
如选10个号码,如果采用复式投注则需120注,而在'旋转矩阵'中只用8-12注就可覆盖其中的6个以上的号码。
但应该指出的是:这种方法也有它的缺陷,那就是虽然保住了中6个号码,但很容易漏掉大奖。
但比起复式投注大资金大范围捕鱼(有时还空手而归)的做法,明显具有稳扎稳打,投入少见效快的特点,特别适合工薪阶层的彩票玩家。
三、旋转矩阵的原理旋转矩阵详细了解:实际上,旋转矩阵并不是教如何选号的,而是教你如何科学地组合号码。
从它的别名“聪明组合”我们就可以知道了!站在数学角度看来,旋转矩阵属于一个典型的组合设计问题,进一步讲,是属于组合设计中的覆盖设计的问题。
四、旋转矩阵的使用旋转矩阵的使用过程是:(1)首先依据各种分析工具,确定若干个号码;(2)选择合适的组号规则(公式),然后生成号码即可。
使用矩阵前,我们应确认要选择哪一组公式!应注意的是旋转矩阵的注数与你所选择的号码个数是呈级数关系的,你选择了更多的号码那么你的投入将大大的增加!当号码增加到一定的程度后如果不加入一定的条件,那么你的投入将可能是一个天文数字!投入与你能使用的号码个数及矩阵中奖保证是成正比的。
旋转矩阵用法
旋转矩阵用法
1. 嘿,你知道旋转矩阵可以这么用吗?比如说在彩票选号中,它就像一个神奇的钥匙!我们可以利用它来排列组合号码,说不定下一个大奖得主就是你哦!
2. 哇塞,旋转矩阵的用法可多了去了!就像搭积木一样,能构建出各种可能。
比如在数据分析中,它能帮我们发现隐藏的规律,这多厉害呀!
3. 哎呀呀,旋转矩阵能这么玩!好比在迷宫中找出口,我们可以通过它找到最优路径。
像在资源分配时,用它来规划就超有用呢!
4. 嘿呀,你晓得不,旋转矩阵用法超有趣!就如同给菜谱添加调料,它能让结果更加精彩。
比如在项目安排上,合理运用它能大大提高效率哟!
5. 哟呵,旋转矩阵的用处可真不小啊!就好像是一个魔法棒。
在物流配送中,用它来设计路线,那不就轻松又高效啦!
6. 哇哦,旋转矩阵还有这种用法呀!仿佛是一把万能钥匙。
在策略制定中,靠它就能打开新局面,多牛啊!
7. 嘿,告诉你哈,旋转矩阵的这个用法太棒啦!就像在夜晚找到一盏明灯。
像在职位安排上,借助它就能人尽其才呢!
8. 哎呀,旋转矩阵的这些用法太绝了!就如同拥有了超能力。
在资源优化中利用它,能实现效益最大化呀!总之,旋转矩阵真的是个超厉害的工具,一定要好好去研究和运用它呀!。
opencv旋转矩阵转四元素
opencv旋转矩阵转四元素摘要:1.旋转矩阵与四元素简介2.旋转矩阵与四元素的关系3.如何通过旋转矩阵得到连续的三维坐标4.具体示例与解析5.总结与应用正文:**一、旋转矩阵与四元素简介**在计算机视觉和图形学领域,旋转矩阵(Rotation Matrix)和四元素(Quaternion)是描述三维空间中物体旋转时常用的数学工具。
它们可以相互转换,并且都可以用来表示一个三维旋转。
**二、旋转矩阵与四元素的关系**旋转矩阵是一个3x3的矩阵,它可以表示一个三维旋转。
设旋转矩阵为R,那么R的列向量表示旋转后的坐标,R的行向量表示旋转前的坐标。
四元素是一个有序的四元组(w, x, y, z),其中w、x、y、z分别表示实数部分和虚数部分。
四元素可以表示为一个3D旋转,它的实部w表示旋转轴的模长,虚部(x,y,z)表示旋转轴的方向。
**三、如何通过旋转矩阵得到连续的三维坐标**假设有一个三维坐标(x1,y1,z1),我们希望通过对这个坐标进行连续的旋转,得到一个新的坐标(x2,y2,z2)。
我们可以通过以下步骤实现:1.首先,将初始坐标(x1,y1,z1)与旋转矩阵相乘,得到旋转后的坐标(x"1,y"1,z"1)。
2.然后,将旋转后的坐标(x"1,y"1,z"1)与另一个旋转矩阵相乘,得到第二个旋转后的坐标(x"2,y"2,z"2)。
3.重复上述过程,直到得到所需数量的连续旋转坐标。
**四、具体示例与解析**假设我们有一个初始坐标(1,2,3),并希望通过对这个坐标进行连续的旋转,得到一个新的坐标。
首先,我们设定一个旋转矩阵R1,表示绕x轴旋转θ1角度:R1 = | 1 -0 0 || 0 cosθ1 -sinθ1 || 0 sinθ1 cosθ1 |然后,我们设定一个旋转矩阵R2,表示绕y轴旋转θ2角度:R2 = | cosθ2 0 sinθ2 || 0 1 0 || -sinθ2 0 cosθ2 |接下来,我们将初始坐标(1,2,3)与旋转矩阵R1相乘,得到旋转后的坐标(x1",y1",z1"):x1" = 1 * (1 - 0 * sinθ1) + 2 * (0 * cosθ1 - 0 * sinθ1) + 3 * (0 * sinθ1 - 1 * cosθ1)y1" = 1 * 0 + 2 * cosθ1 + 3 * sinθ1z1" = 1 * sinθ1 + 2 * 0 + 3 * cosθ1然后,我们将旋转后的坐标(x1",y1",z1")与旋转矩阵R2相乘,得到最终坐标(x2",y2",z2"):x2" = x1" * cosθ2 + y1" * 0 + z1" * -sinθ2y2" = x1" * 0 + y1" * 1 + z1" * 0z2" = x1" * sinθ2 + y1" * 0 + z1" * cosθ2**五、总结与应用**通过上述示例,我们了解了如何通过旋转矩阵(或四元素)来得到连续的三维坐标。
常用旋转矩阵组号
常用旋转矩阵组号方案此前我们介绍了旋转矩阵的原理,为了方便各位读者,我们总结了常用的旋转矩阵组合,在使用时只需将相应的号码按组合顺序排列,就可以完成组合方案。
下文中包含三类普通缩水组合,分别是中六保五型、中五保四型和中六保四型。
中六保五型缩水,是最传统的缩水方式,比较适合资金相对充裕的彩民。
红球复式中六个号码,最低中奖保证也是五个号码,如果能中5+1就是3000元,同时也未完全排除中大奖的可能,比较适合对大奖有一定期望的彩民。
由于可将原始复式缩减7至40倍,使得彩民在投注时有充裕的资金加大对蓝球的选择。
由于只中六个红球仅为二等奖回报不高,而蓝球每多选一个资金就要加上一倍,中六保五型缩水与复式投注相比,从回报上更为科学,毕竟中中等奖级的概率要远远超过中大奖的概率,对于投注者来说,使用中六保五型缩水能有效保护资金的安全性。
例如十六码红球组合多达8008注,而进行中六保五缩水后仅为224注,此时即使全包蓝球也不过是3584注,在原始复式全中的情况下至少能保住一注5+1(当然,我们也不建议蓝球全包,一次选择4个以内是比较科学的)。
有些彩民朋友可能会问,中6+0可以拿二等奖,而中5+1只能中三等奖3000元,这样划算吗?实际上,以十六码复式为例,选中6个号码的理论概率仅为0.72%,长期投注下去必然是吃不消的,因此我们没有必要把中6+0作为基本定位,中六保五型缩水的效率要远远高于复式投注。
中五保四型缩水,是最常用的缩水方式,也是相对来说最实用的缩水方式。
有经验的彩民朋友都知道,如果您的原始复式为16个号左右,最常遇到的是中四码和五码的组合,能圈中六码的机会实在是凤毛麟角。
因此,中六保X型缩水实际上并未收到完美成效。
而中五保四型缩水本身定位就是原始复式中五码,虽然中大奖的可能性不如中六保五型缩水,但是却能节省大量资金,例如十六码原始复式为8008注,中六保五型缩水为224注,而中五保四型缩水仅为54注。
如果您使用了中六保五型缩水,在原始复式只中五码的情况下,缩水结果通常也只能保住四码,因此两者效果几乎相同,区别仅仅在于中四码注数的波动。
计算旋转矩阵

计算旋转矩阵旋转矩阵是物理学和数学领域中用于描述旋转和变换角度的矩阵。
它主要用于表示空间中物体的旋转,三维空间中物体的旋转可以用旋转矩阵定义。
在应用旋转矩阵时,必须先计算出旋转矩阵,才能确定物体的变换角度。
计算出旋转矩阵的基本方法是使用四元数的方法。
四元数的定义为四元组(w,x,y,z),其中w代表实部,x、y、z代表虚部。
四元数的特点是可以用四元数的计算方法来表达任意的旋转矩阵。
使用四元数计算旋转矩阵的步骤是先将四元数表示成旋转矩阵,然后再计算出旋转矩阵。
将四元数表示成旋转矩阵的公式如下:R =[w+x-y-z, 2(xy-wz), 2(xz+wy), 0;2(xy+wz), w-x+y-z, 2(yz-wx), 0;2(xz-wy), 2(yz+wx), w-x-y+z, 0;0, 0, 0, w+x+y+z]其中,R表示旋转矩阵,w、x、y、z分别表示四元数的四个分量。
计算出旋转矩阵后,可以利用旋转矩阵来判断一个物体在三维空间中的旋转变换角度。
这样一来,就可以完成一个三维空间物体的旋转。
旋转矩阵的计算方法有很多,不仅可以使用四元数的计算方法,还可以使用欧拉角的方法,甚至可以使用投影变换的方法来计算旋转矩阵。
使用欧拉角的方法计算旋转矩阵的特点是,对于绕任意轴旋转的情况,可以将绕任意轴旋转分解为三个绕x轴、y轴和z轴的旋转,然后再把三个绕x轴、y轴和z轴的旋转依次转换成旋转矩阵,最后将三个旋转矩阵相乘,即可得到任意轴旋转的旋转矩阵。
使用投影变换法来计算旋转矩阵特点在于,对于对象在三维空间中的旋转变换,它可以使用投影变换来实现,即将三维空间中的对象投影到二维平面上,然后利用二维平面上的变换角度,把变换后的结果投影回三维空间,最后再利用旋转矩阵将变换后的结果表示出来。
总之,计算旋转矩阵是一个重要的矩阵运算,可以用多种方法计算出旋转矩阵,维护物体在三维空间中的旋转变换,有助于我们理解三维空间中物体的变换角度。
旋转矩阵游戏公式

旋转矩阵游戏公式1. 旋转矩阵基本定义旋转矩阵是一个二维数组,可以表示二维空间中物体的旋转变换。
旋转矩阵通常用一个2x2的矩阵表示,如下所示:| cosθ -sinθ || sinθ cosθ |其中,θ表示旋转的角度。
2. 顺时针旋转公式顺时针旋转是指物体按照顺时针方向进行旋转。
顺时针旋转的公式如下:x' = x * cosθ - y * sinθy' = x * sinθ + y * cosθ其中,(x, y)表示旋转前的坐标,(x', y')表示旋转后的坐标,θ表示旋转的角度。
3. 逆时针旋转公式逆时针旋转是指物体按照逆时针方向进行旋转。
逆时针旋转的公式如下:x' = x * cosθ + y * sinθy' = -x * sinθ + y * cosθ其中,(x, y)表示旋转前的坐标,(x', y')表示旋转后的坐标,θ表示旋转的角度。
4. 组合旋转公式在旋转矩阵游戏中,常常需要对物体进行多次旋转。
多次旋转可以通过多个旋转矩阵的乘积来表示。
例如,对于两次旋转,可以使用以下公式:M = M1 * M2其中,M表示最终的旋转矩阵,M1表示第一次旋转的矩阵,M2表示第二次旋转的矩阵。
5. 图形旋转公式在旋转矩阵游戏中,常常需要对图形进行旋转。
对于图形的旋转,可以使用以下公式:x' = (x - cx) * cosθ - (y - cy) * sinθ + cxy' = (x - cx) * sinθ + (y - cy) * cosθ + cy其中,(x, y)表示旋转前的图形上的点坐标,(x', y')表示旋转后的图形上的点坐标,(cx, cy)表示旋转中心的坐标,θ表示旋转的角度。
以上就是旋转矩阵游戏中常见的一些公式及其应用。
玩家可以根据这些公式进行旋转操作,达到游戏的目标。
希望这些内容对玩家有所帮助!。
旋转矩阵转换法

旋转矩阵转换法深入了解“旋转矩阵”<一>旋转矩阵是一种号码的组合方法,而不是选号方法。
旋转矩阵是根据数学的覆盖原理进行数字组合的一种方法,其核心是以最低的成本实现最大的效果。
而复式投注是以滴水不漏、无遗漏的全覆盖设计对数字的排列进行组合。
一种是经过优化了的组合,一种是全部的组合,对于乐透型彩票而言,复式投注由于组合形式毫无遗漏,因而只要所选的号码中含有中奖号码,有7+1个中7+1个,有7个中7个,依此类推,100%保证中奖;旋转矩阵则根据所使用的公式才能确定所中的号码个数。
“旋转矩阵”与复试投注是一种基于“旋转矩阵”数学原来构造的选号法,其核心宗旨是:以极低的成本实现复试投注的效果。
一个例子:比如你选了10个号码,不妨设为A,B,C,D,E,F,G ,H,J。
你想把他们组合起来进行投注,那么组合号码的方法一般有以下几种:1.复式投注最简单的方法无疑是复式投注,你只要购买这十个号码的复式就行了。
所需的注数是120注,成本是240元。
复式投注的好处是可以把这10个号码的所有组合一网打尽,也就是说,如果你选了这10个号码中包含了开出的7个基本号,你可以稳中一等奖。
但复式投注的缺点也是显而易见的,它的成本太高了,所以所选的号码个数很有限,如果超过12个号码就要超过3000元。
如果你不想花那么大的成本的话,比如只想花50元以内,那么你可以选用其他的组合号码的办法。
2.轮次矩阵轮次矩阵就是把每个号码都按顺序依次轮一遍,以如上的10个号码为例,轮次矩阵组合的10注如下:A,B,C,D,E,F,GB,C,D,E,F,G,HD,E,F,G,H,I,JE,F,G,H,I,J,AF,G,H,I,J,A,BG,H,I,J,A,B,CH,I,J,A,B,C,DI,J,A,B,C,D,EJ,A,B,C,D,E,F这种组合号码的方法成本很低,而且看过去很美观,把每个号码都排了7遍。
但实际上,这种组合号码的方法和胡乱组合一样,是很不可取的。
8-旋转矩阵

该形式的旋转矩阵式罗德里格于1840年推倒而得 到的,因而称罗德里格矩阵。需要指出的是罗德 里格矩阵中三个参数a,b,c并不是方向余弦。
例题:
1、已知: 147'22"; 051'42"; 023'42";求:
① R , , R , R 和R
②计算 ' , ' , ' 和A, , v
2、若采用以X为主轴的坐标系统,R矩阵中的 九个元素为
a1 cos ' cos ' a 2 sin ' sin ' a3 sin ' b1 cos ' sin ' sin ' sin ' cos ' b2 cos ' cos ' sin ' sin ' sin ' b sin ' cos ' 3 c1 sin ' cos ' cos ' sin ' cos ' c 2 sin ' cos ' cos ' sin ' sin ' c3 cos ' cos '
回想:R矩阵的性质
1、R是正交矩阵。即行、列、对角线元素平方和为 “1”,行列式的值是“1”。 1 T R R 2、正交矩阵的逆矩阵是它本身的转置即 。 3、R矩阵的9个元素中只有3个是独立的,是三个旋转 角的函数。 4、无论采用坐标系统如何(旋转参数不同),但R是不 变的。因为其转换关系是唯一确定的。所以有课本上 2-10的公式。 tan a3 / c3 tan ' b3 / c3 tan A a3 / b3 ' sin b3 sin a3 cos c3 ' tan b1 / b2 tan a / a tan c / c 2 1 1 2
015-什么是旋转矩阵?
什么是旋转矩阵?2012-03-09 10:22:47 责任编辑:amber 来源:乐和彩点击次数:22927一、名词解释【中6保5】比如你选择的10个红球复式中了6红,则经过旋转矩阵拆分后,一定能中5红,当然,仍有机会中6红;【中6保4】比如你选择的10个红球复式中了(4或5或6)红,则经过旋转矩阵拆分后,一定能中4红,当然,仍有机会中(5或6)红;【中5保5】比如你选择的10个红球复式中了(5或6)红,则经过旋转矩阵拆分后,一定能中5红,当然,仍有机会中6红;【中5保4】比如你选择的10个红球复式中了(4或5)红,则经过旋转矩阵拆分后,一定能中4红,当然,仍有机会中5红;二、旋转矩阵的由来旋转矩阵的核心就是用比较少的钱,合理组合彩票号码,提供中奖率。
美国人Gail Howard发明的"旋转矩阵"组合法造就了74位大奖得主,这是一个算法很复杂且很有特色的组合方法。
这种方法的特点是:怎样花很少的钱将选中的号码组合在一起而减少遗漏。
如选10个号码,如果采用复式投注则需120注,而在"旋转矩阵"中只用8-12注就可覆盖其中的6个以上的号码。
但应该指出的是:这种方法也有它的缺陷,那就是虽然保住了中6个号码,但很容易漏掉大奖。
但比起复式投注大资金大范围捕鱼(有时还空手而归)的做法,明显具有稳扎稳打,投入少见效快的特点,特别适合工薪阶层的彩票玩家。
三、旋转矩阵的原理旋转矩阵详细了解:实际上,旋转矩阵并不是教如何选号的,而是教你如何科学地组合号码。
从它的别名“聪明组合”我们就可以知道了!站在数学角度看来,旋转矩阵属于一个典型的组合设计问题,进一步讲,是属于组合设计中的覆盖设计的问题。
四、旋转矩阵的使用旋转矩阵的使用过程是:(1)首先依据各种分析工具,确定若干个号码;(2)选择合适的组号规则(公式),然后生成号码即可。
使用矩阵前,我们应确认要选择哪一组公式!应注意的是旋转矩阵的注数与你所选择的号码个数是呈级数关系的,你选择了更多的号码那么你的投入将大大的增加!当号码增加到一定的程度后如果不加入一定的条件,那么你的投入将可能是一个天文数字!投入与你能使用的号码个数及矩阵中奖保证是成正比的。
matrix4 旋转矩阵

matrix4 旋转矩阵Matrix4 旋转矩阵旋转矩阵是一个在三维空间中应用的数学工具,用于将一个对象绕某个点旋转一定角度。
在计算机图形学中,旋转矩阵是非常重要的。
这篇文章将逐步解释matrix4 旋转矩阵的原理和应用。
一、旋转矩阵的定义旋转矩阵是一个表示旋转变换的方阵,用于描述一个对象相对于某个旋转中心的旋转变换。
在3D 空间中,矩阵通常是一个4x4 的方阵,被称为matrix4。
旋转矩阵可以通过一些基本操作来构造,最常见的是绕x、y、z 轴旋转的矩阵。
二、旋转矩阵的构造1. 绕x 轴旋转绕x 轴旋转的旋转矩阵可以通过以下方式构造:R_x = [[1, 0, 0, 0], [0, cos(theta), -sin(theta), 0], [0, sin(theta), cos(theta), 0], [0, 0, 0, 1]]其中theta 表示旋转的角度,cos 和sin 分别表示cos(theta) 和sin(theta) 的值。
2. 绕y 轴旋转绕y 轴旋转的旋转矩阵可以通过以下方式构造:R_y = [[cos(theta), 0, sin(theta), 0], [0, 1, 0, 0], [-sin(theta), 0, cos(theta), 0], [0, 0, 0, 1]]3. 绕z 轴旋转绕z 轴旋转的旋转矩阵可以通过以下方式构造:R_z = [[cos(theta), -sin(theta), 0, 0], [sin(theta), cos(theta), 0, 0], [0, 0, 1, 0], [0, 0, 0, 1]]这些基本的旋转矩阵可以组合使用得到任意方向的旋转结果。
三、旋转矩阵的运用旋转矩阵在计算机图形学中有广泛的应用,常被用来描述物体的旋转、变形、动画等效果。
1. 对象的旋转通过将对象的顶点坐标与旋转矩阵相乘,可以实现对象的旋转效果。
例如,我们有一个三维物体,每个顶点的坐标为(x, y, z),我们想要将物体绕x 轴旋转45,可以使用以下计算:new_x = xnew_y = y * cos(theta) - z * sin(theta)new_z = y * sin(theta) + z * cos(theta)其中theta 表示旋转角度。
绕任意轴旋转的旋转矩阵

绕任意轴旋转的旋转矩阵旋转矩阵是研究几何学的基本概念之一,它涉及到从一个空间坐标系到另一个空间坐标系的变换。
旋转矩阵可以使天体从一个位置和方向转移到另一个位置和方向。
旋转矩阵有两种:绕指定轴旋转的旋转矩阵和绕任意轴旋转的旋转矩阵。
绕指定轴旋转的旋转矩阵,也称为固定轴旋转,是指对三维坐标系统中的任意物体绕给定轴旋转,在旋转轴的一侧的物体的位置将不受影响,而另一侧的物体将完成相应的斜切变换。
其旋转矩阵可以通过指定三个旋转角,包括滚动角、俯仰角和偏航角,来表达旋转后的位置和朝向。
绕任意轴旋转的旋转矩阵是指对三维坐标系统中的任意物体绕给定轴旋转,而不仅仅是指定的三个轴,而是任意的轴。
可以进行旋转的任意轴为三个,即指定的旋转轴围绕其自身旋转,形成坐标系的相对旋转矩阵。
表达绕任意轴旋转的旋转矩阵的一种方法是使用Axis-Angle表示法。
它需要输入指定的旋转轴和旋转角度,然后就可以构建出旋转矩阵。
另一种方法是使用Rodrigues公式,这里只要传入一个旋转轴和一个旋转角度来表示旋转矩阵。
旋转矩阵有一些基本性质,它改变坐标系中物体的位置和朝向,但是不改变物体的旋转坐标和长度.旋转矩阵是线性变换,它会使点的坐标发生对称性变化,使得它们在旋转轴的另一侧的位置,也会将原来的比例尺保留下来。
另外,旋转矩阵也保持了向量的方向,因此,量尺的值也不会改变。
此外,旋转矩阵也是可逆的,其逆矩阵可以通过求解其原矩阵的伴随矩阵而得到,即可以把一个坐标系中的坐标变换回另一个坐标系中的坐标。
旋转矩阵在物体运动学和几何学中都有着重要意义,它可以用来描述物体在三维坐标系统中的各种旋转,而不管能用绕指定轴旋转的旋转矩阵来描述的,还是绕任意轴旋转的旋转矩阵来描述的,都能够被旋转矩阵表现出来。
理解旋转矩阵的性质和用法能够帮助我们在实际工程中更好地应用它,从而更好地了解物体在三维坐标系统中的运动和变形。
总而言之,绕任意轴旋转的旋转矩阵是指对三维坐标系统中的任意物体绕给定轴旋转,而不仅仅是指定的三个轴,而是任意的轴。
旋转矩阵自由度
旋转矩阵自由度旋转矩阵是矩阵理论中的一个重要概念,它描述了一个物体在三维空间中的旋转变换。
而旋转矩阵自由度则是指旋转矩阵所包含的独立变量的数量,即可以用来描述旋转的自由度的参数的个数。
本文将围绕旋转矩阵自由度展开详细讨论。
一、旋转矩阵的定义和表示旋转矩阵是一个正交矩阵,满足以下两个条件:其转置等于其逆矩阵,即RT = R-1;其行列式等于1,即|det(R)| = 1。
旋转矩阵通常用3×3的矩阵表示,其中每一列(或每一行)代表一个坐标轴在旋转后的方向。
二、旋转矩阵自由度的含义旋转矩阵自由度是指旋转矩阵中独立变量的数量。
在三维空间中,旋转变换涉及三个坐标轴,因此旋转矩阵共有9个元素。
然而,由于旋转矩阵是正交矩阵且其行列式为1,因此它包含了一些约束条件,使得实际的自由度要小于9。
三、旋转矩阵自由度的计算要计算旋转矩阵的自由度,首先需要了解旋转矩阵的参数化方法。
常见的参数化方法有欧拉角、旋转向量和四元数等。
不同的参数化方法对应着不同的自由度。
1. 欧拉角欧拉角是一种常用的参数化方法,它将旋转分解为绕三个固定坐标轴的连续旋转。
在三维空间中,欧拉角共有三个参数,分别表示绕三个坐标轴的旋转角度。
由于旋转矩阵中存在万向节死锁问题,因此欧拉角只能描述三个自由度。
2. 旋转向量旋转向量是一种紧凑的参数化方法,它通过一个三维向量来表示旋转轴和旋转角度。
旋转向量的范数表示旋转角度,而方向表示旋转轴。
旋转向量共有三个参数,因此可以描述三个自由度。
3. 四元数四元数是一种复数拓展到四维的数学概念,它可以用来表示旋转。
四元数共有四个参数,分别对应实部和三个虚部。
由于四元数的单位范数约束,实际上只有三个参数是独立的,因此可以描述三个自由度。
四、旋转矩阵自由度的意义旋转矩阵自由度的数量决定了旋转变换的灵活性。
在三维空间中,旋转变换是一个六自由度的变换,即旋转矩阵需要六个独立变量来描述。
而旋转矩阵的自由度则是描述旋转变换所需的参数个数。