R2机器人电路原理图
ER系列机器人技术基础PPT

研发中心电气工程部
We are offering Accuracy & Efficiency! 南京埃斯顿机器人工程有限公司
内容
一 埃斯顿机器人介绍 二 机器人基础知识 三 机器人控制系统 四 安全与维护事项
We are offering Accuracy & Efficiency!
轴名称 TX TY TZ TA TB
TC
动作 沿工具坐标系TX方向运动 沿工具坐标系TY方向运动 沿工具坐标系TZ方向运动 绕工具坐标系TX方向旋转 绕工具坐标系TY方向旋转
绕工具坐标系TZ方向旋转
We are offering Accuracy & Efficiency!
21
机器人基础知识
工具坐标的移动,以工具的有效方向为基准,与机器人的位置、姿势无关, 所以进行相对于工件不改变工具姿势的平行移动操作时最为适宜。
沿升降方向刚性好,尤其适合平面装配 作业。
SCARA-Selective Compliance Assembly Robot Arm —选择顺应性装配机器手臂
We are offering Accuracy & Efficiency!
8
埃斯顿机器人介绍
结构介绍
J2、J3、 J4轴电机
电机线缆、I/O、 气管
接触器 滤波器 风扇
We are offering Accuracy & Efficiency!
1
一 埃斯顿机器人介绍
We are offering Accuracy & Efficiency!
2
埃斯顿机器人介绍
工业机器人分类:方式一
按手臂机 构结构型 式
机器人电路基础知识
8/20/2013
12
RoboGame2009
二极管种类
• • • • • • • • 检波二极管:2AP系列、1N34/A、1N60等。 整流二极管:AC—>DC,工作允许电流和工作电压。 开关二极管:类似电控开关。IN4148。 稳压二极管:齐纳效应,反向使用。1N47XX。 变容二极管:主要用在电子调谐及锁相环电路中。 光电二极管:接收光照射时,有光电流反方向流动。 发光二极管:LED,有各种颜色,超高亮度的。 隧道二极管:负阻抗特性。
8/20/2013
28
RoboGame2009
TTL与CMOS
• TTL与CMOS接口: • 如果是 TTL 驱动 CMOS,要考虑电平的接口。 TTL 可直接驱动 74HCT 型的 CMOS,其余必 须考虑逻辑电平的转换问题。 • 如果是 CMOS 驱动 TTL,要考虑驱动电流不能 太低。74HC/74HCT 型 CMOS 可直接驱动 74/74LS 型 TTL,除此需要电平转换。
8/20/2013
6
电容
• 对于直流,电容具有存储电荷的作用,因为有充 电过程,电容两端的电压不会发生急剧变化,对 直流电有隔直作用; • 对于交流,电容器具有容性阻抗,容抗的大小和 电容值及电路的工作频率有关。
8/20/2013
7
RoboGame2009
电容
• 主要参数: 1.容量:由于法拉F太大,一般用
8/20/2013
24
RoboGame2009
数字器件
或非门: • 2输入端四或非门:74LS02、CD4001B • 3输入端双或非门:CD4000B(+反相器) • 4输入端双或非门:CD4002B
8/20/2013
机器人学_第2章_机器人机械结构

– 肩关节的摆动:
• 电机M2→同步带传动B2→减速器R2→肩关节摆动n2
29
腕部俯仰
关节型机器人传动 系统图:
肘关节摆动
肩关节的摆动
腕部的旋转
30
腕部旋转局部图例:
电机M5→减速器R5→链轮 副 C5→锥齿轮副G5→旋转运动n5
上料道与下料道分 别设在机床的两侧, 双臂能同时动作, 两臂同步沿横梁移 动,缩短辅助时间
b.双臂交叉配置,
两臂轴线交于机床 的中心,两臂交错 伸缩进行上下料, 并同时沿横梁移动
c.双臂交叉配置,
悬伸梁式,横梁长 度较a,b短,双臂位 于横梁的同一侧
5
(2).双臂悬挂式(b)
双臂回转型,双 臂交叉且绕同轴 回转,分别负责 上下料(主要是 盘状零件),只 需一个动力源, 结构紧凑,动作 范围大
第2章 机器人的机械结构
2.1 机身和臂部 2.2 腕部和手部结构 2.3 传动部件设计
1
2.1 机身和臂部
• 一.机身和臂部的作用
• 机身是直接连接支承传动手臂和行走机 构的部件,机身可以是固定的,也可以 是行走式的
• 手臂部件用来支承腕部(关节)和手部 (包括工件和工具),并带动它们在空 间运动
• 远距离传动手腕:
–有时为了保证具有足够大的驱动力,驱动装 置又不能做得足够小,同时也为了减轻手腕 的重量,采用远距离的驱动方式,可以实现 三个自由度的运动。
44
1)液压直接驱动BBR手腕图例:
回转 R
俯仰 B
偏转 B
45
2). 单回转腕部 结构示例
46
3)双回转油缸驱动手腕
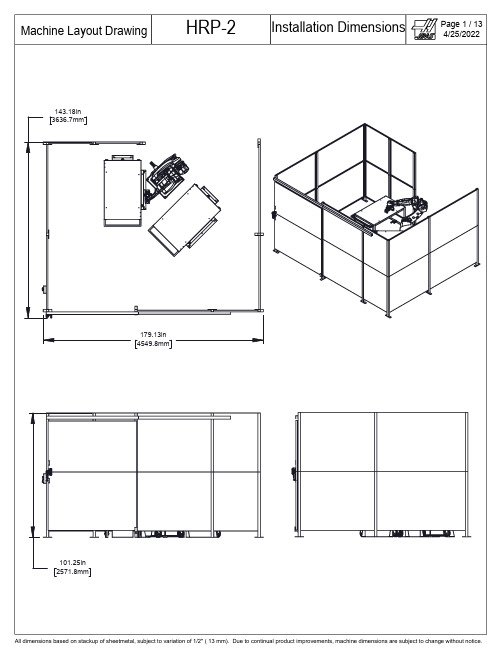
HRP-2机器人安装尺寸和布局图说明书
2.10in 53.3mm
3.25in 82.6mm
2.29in 58.1mm
B
.04in 1.0mm
1.97in 50.0mm
.50in 12.7mm
.79in 20.0mm
.59in 14.9mm
DETAIL B SCALE 1 : 1
Machine Layout Drawing
Machine Layout Drawing
HRP-2
Robot
Page 2 / 13 4/25/2022
J3(+268.4/-190))
J4(±200)
J5(±140) J6(±270)
J2(+160/-100) J1(±170)
Robot model is FANUC M-20iD/25
Maximum Payload: 55lbs [25kg]
Maximum Reach: 72in [1831mm]
All dimensions based on stackup of sheetmetal, subject to variation of 1/2" ( 13 mm). Due to continual product improvements, machine dimensions are subject to change without notice.
Machine Layout Drawing
HRP-2
HRP-2 with UMC-500
Page 5 / 13 4/25/2022
214.69in 5453.2mm
125.48in 3187.2mm
102.72in 2609.0mm
机器人电路图
Latest revision:
Lab/Office:
Table of contents: Prepared by, date: CNSHLIN8 Approved by, date:
= Plant: Location: + Sublocation:+ Document no. Rev. Ind Page 3 Next 4 3HAC049406-003 02 Total 52 Status: Approved
1
2
3
4
5
6
7
8
Table of contents
Plant Location Page Page description 31 ANALOGUE I/O UNIT DSQC355B 32 ENCODER UNIT DSQC377 33 CC-LINK 34 VISION, INTEGRATED CAMERAS 35 ETHERNET SWITCH A64/CAMERA 36 AXIS COMPUTER UNIT 37 AXIS COMPUTER UNIT 38 RECTIFIER AND BLEEDER 39 FAN UNIT 40 REMOTE SERVICE BOX DSQC680 41 SERVO DRIVE SYSTEM IRB 120 42 CONTROL CABLE 43 SERVO DRIVE SYSTEM IRB 140 44 CONTROL CABLE IRB 140 45 SERVO DRIVE SYSTEM IRB 360 46 47 48 49 50 CONTROL CABLE IRB 360 SERVO DRIVE SYSTEM IRB 1200 CONTROL CABLE IRB 1200 SERVO DRIVE SYSTEM IRB 1410, 1600, 260 CONTROL CABLE IRB 1410, 1600, 260 Page supplementary field Date 3/31/2016 3/31/2016 3/31/2016 3/31/2016 3/31/2016
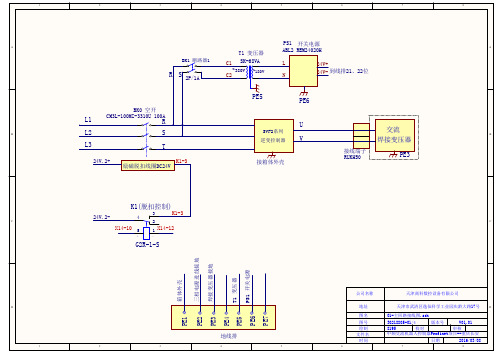
机器人连接控制器图纸-SVF2天津商科
PI02 PI02 PIS?02 PIˮѹ¼ì²â02 PIS?02 PIS?02 PIS?02 PIS?02 PIS?02 PIS?02
PIS?01 PIS?01 PI01 PI01 PIS?01 PIS?02 PIS?02 PI02 PI02 PIS?02
PI01 PIS?01 PI01 PIˮѹ¼ì²â01 PI01 COˮѹ¼ì²â
8195
校对
审核
文件名
中频交流机器人控制器Profinet项目--重庆长安
时间
日期
2016/03/08
1
2
3
4
5
6
7
8
PIT?01 PIT?02
~380V ~180V
C2 PIT?03 PIT?04
PE5
PS1 开关电源 ABL2 REM24020H
L
24V+
N
24V- 到线排21、22位
PE6
U
SVF2系列
逆变控制器
V
接箱体外壳
接线端子 RUKH50
交流 焊接变压器
PE3
24V.2-
CK1O(K脱1(扣Í控Ñ¿制Û¿) ØÖÆ)
6 13
4
红色 7
蓝色 X10
11
8
8
B
外部故障复位 9 X10-8
X10-8 9
绿色 B
X12
X2
+24V2-2/输入公共端10 X10-6
无故障输出
11 X13-5
X10-6 10 X13-5 11
外C部O故Í障â复²位¿¹ÊÕϸ´Î»
PIÍⲿ¹ÊÕϸ´Î»01 PIÍⲿ¹ÊÕϸ´Î»02
机器人行走设计电路设计讲解
课程设计任务书学生姓名:冀阳博专业班级:电气1001指导教师:龚跃玲工作单位:自动化学院1、题目: 机器人行走电路设计任务:设计一个能前进、后退的机器人行走控制电路。
要求:1)接通电源,机器人前进,行走一段时间后,机器人自动后退,退行一段时间后自动前行,周而复始。
2)机器人行走动力只能使用干电池,不能使用动力电源。
3)机器人前进、后退时间可调。
4)对设计电路进行仿真。
2、初始条件1.实验室提供万用表、信号发生器、直流稳压电源、示波器等设备。
2.学生已学习了大学基础课程和《电路》、《模拟电子技术》、《数字电子技术》、《电力电子变流技术》等专业基础课程。
3.主要参考文献1)《新编电子电路大全》第1、2、3、4卷中国计量出版社2)《传感器及其应用电路》何希才编著电子工业出版社3)《电力电子变流技术》黄俊王兆安编机械工业出版社4)《集成电路速查手册》王新贤主编山东科学技术出版社5)《集成电路速查大全》尹雪飞陈克安编西安电子科技大学出版社6)《晶体二极管手册》各种版本皆可7)《晶体三极管手册》各种版本皆可3、要求完成的主要任务1.课程设计结束时每个学生要交一份按统一格式要求撰写的课程设计说明书,并装订成册。
2.课程设计说明书中每个题目要求有方案比较、绘制方框图、电原理图,阐述电路工作原理、每个元器件的主要参数、设计电路的性能指标及电路仿真效果图等。
3.说明书中除个人签名外,其它文字、符号、图形或表格一律用计算机打印。
4.文字、符号、图形等必须符合国家标准。
5.独立完成设计任务,严禁相互抄袭。
4、时间安排设计时间为二周(6月25日—7月6日),安排如下:1.6月25日上午,指导教师讲授课程设计的有关基本知识等。
2.6月25日下午——7月1日学生查阅资料,完成初步设计。
3.7月2日——7月3日检查设计进度,答疑、质疑。
4.7月4日——7月5日完善设计,形成设计说明书电子文档。
4.7月5日——7月6日课程设计打印、装订、提交。
扫地机智能控制系统设计

采用2行16个字的DM-162液晶 模块,通过与单片机连接,编 程,完成显示时间及清扫机行
进速度的功能。
3.1 传感器系统
内传感器系统
主要用于采集系统自身状态的信息,比如速度、加速度、轨迹、位置等。这类传感器 主要有测速发电机、加速度计、编码器、陀螺仪、电子罗盘等。
外传感器系统
外传感器负责采集系统外部环境信息,比如图像、距离、受力等。这类传感器包括 CCD视觉传感器、超声波传感器、红外传感器、力传感器等。
移动,扫地机驱动器中最根本的问题就是控制电机, 压脉冲序列并通过控制电压脉冲宽度或周期以达到变压
控制电机转的圈数就可以控制扫地机移动的距离和 方向、清扫机械的弯曲的程度或者移动的距离等。
的目的。
一般有专门的控制卡和控制芯片来进行控制。有了
这些控制卡和芯片,然后把微控制器与其连接起来
就可以用程序来控制电机。
Part Two
采用单片微机控制器
单片微控器
本设计以AT89C51单 片机作为检测和控制核
心。是美国ATMEL公司 生产的低电压,高性能
CMOS 8位单片机。兼容 标准MCS-51指令系统,
片内置通用8位中央处理 器(CPU)和Flash存储 单元。
AT89C51 主要性能参数
1.与MCS-51产品指令系统完全兼容 2.有4K字节可重擦写Flash闪速存储器 3.有1000次的擦写周期 4.全静态操作:0Hz~24MHz 5.有128×8字节的内部RAM 6.有32个可编程I/O 口 7.有2个16位定时/计数器 8.有6个中断源 9.低功率空闲和掉电模式
4.2 驱动系统电路
驱动系统电路
驱动系统电路包括驱动器、光电隔离模块以及驱动器保护电路等部分。在具体电路中,由于单片 机使用5V弱电,而电机的驱动电压为12V或者更高,考虑到单片机会受到驱动部分的干扰,因此采用了 光电耦合器TLP521,把控制部分和驱动部分隔离开来。单片机输出端口的电流一般只有20mA左右,不 足以或者不能稳定地驱动光电耦合器TLP521工作,因此采用芯片74HC245来增强驱动能力,为光电耦合 器TLP521提供合适的驱动电流。驱动器保护电路由8个高速大电流肖恩特二极管1N5822(图中D1~D8) 组成,用来消除电机在起停、制动及换向时产生的反电势。
不二越机器人电源测绘与原理解析130412
不二越电源电路测绘与原理分析陈云龙 130012 一汽轿车股份有限公司摘要我公司于2004年采购了几十台不二越机器人,在公司目前拥有的600多台机器人中,是比较老的产品,产品随长期使用逐渐劣化,并由于备件问题,经常造成较多的停台。
为此,需要对产品的原理进行深入解析,并培养自主维修能力。
其中机器人电源是常损坏的器件之一。
为了降低成本,我们自己测绘了该电源的电路,并通过查询大量开关电源的资料,对其做了详尽的解析,完全掌握了开关电源的维修技术。
关键词开关电源机器人测绘原理维修1 不二越电源电路原理图该电路实际上是一个比较典型的普通PWM开关电源电路。
脉冲宽度的自动调节取决于反馈电平与振荡器三角波的比较。
它是一个正激式隔离开关电源电路。
隔离变压器包括三个绕组,第三绕组为芯片提供启动电路电源。
电路使用了最简单的单管结构。
开关管使用了MOSFET器件:2SK1939(2501),N沟道,功率100W。
使用线性光电耦合器从输出端引回F/B电压及OVP过压反馈,F/B电压基准为基准电源器件。
同时引入了过流保护电路等。
它是一个非谐振式的变换器,即常规的硬开关。
图1、图2是经过我们测绘后的该电源的原理图。
电源输出电压为5VDC。
下面具体分析各单元电路结构及原理。
1输入电路输出电路图1:开关电源原理图(输入、输出部分)G+i2图2:开关电源原理图(控制电路、变换器部分)Gnd4.7kVccGndCF Ton ToffVFCLM+CLM-CTECVoutDET F/B HeatSink4.7k10010015015kON/OFFOVP光电2光电12 电路分解分析2.1 输入电路图3:不二越电源输入电路该电路包含滤波、浪涌抑制及全波整流电路。
输入电路各电容C11、C12、C13用于滤波,滤除高频噪声;电抗器L11用于浪涌抑制;电容C14、C15、C18用于去耦。
输入220VAC电压经过全波整流,产生变换器所需的直流电压,及提供控制电路电源。
工业机器人工作站 ppt课件

PPT课件
26
第四节 工作站的气控系统
气控工作原理 : 手控阀 三联件
两套双支点支承两套夹 具体。
H 型支架下方四个定 位气缸支承定位。
PPT课件
24
(2)转台
交流伺服电机经减 速器和一对外齿轮 带动H型支架转动。
0°、180°位设两 套位置开关,超限 开关和死挡块。
导线及气管经转轴 中心孔引至H支架 处。
底座内装柔性链式 管路保护套。
PPT课件
25
(3)双支点系统
备通信。
电气控制柜:控制除机器人控制内容之
外的其他对象,并协调工作站工作。
1. 主电路分析
合上工作站开关:电源指示灯 HL3 亮;
电气柜风扇 M1 工作。
SA2、SA3控制两个照明灯。
SA1经KM使其他设备带电。
220V:
供PLC电源
变压整流→直流24V→输入、输出模块
110V供电磁铁用电(经中间继电器控制)
本例选:M-K6SB型 选择可搬重量因素:
末端执行器净重 末端执行器重心偏移 机器人最大速度及惯性
选择工作空间因素:
满足作业范围要求 工件置于机器人的最佳作业位置
PPT课件
9
二、机器人的传动与结构
传动示意:
S 轴:D1→R1
L 轴:D2→R2 U 轴:D3→R3 R 轴:D4→R4 B 轴:D5→R5 T 轴:D6→R6
7l轴电动机机器人下臂下端左侧与减速器输出盘连接右侧固连的小轴通过轴承支承在u轴连杆内减速器装在旋转体上极限位置安装极限挡块图右侧为u轴电动机减速器输出转盘与连杆连接下臂上臂拉杆和连杆构成平行四边形机构铰链中用园锥滚子轴承用闷盖调整轴承间隙并密封5r轴结构上臂前段用两圆锥滚子轴承支承于后段内
FANUC(发那科)机器人PMC内部梯形图

FANUC机器人PMC内部梯形图PMC程序构成的要素基本命令功能命令PMC地址PMC程序与机器人程序之间的接口R、K领域与SDO的对应D领域与GO的对应PMC程序的系统控制F1000~F1255的功能G1000~G1255的功能PMC地址对应一览X0~X127←→SDI[1]~SDI[1024](通用数字输入信号)X1000~X1004←→UI[1]~UI[40](UOP输入信号)X1005~X1009←→WDI[1]~WDI[40](焊机输入信号)X1010~X1014←→WSTI[1]~WSTI[40](熔敷检测输入信号)X1015~X1019←→LDI[1]~LDI[40](激光焊机输入信号)X1020~X1024←→RDI[1]~RDI[40](机器人输入信号)X1025~X1026←→SI[1]~SI[16](操作盘输入信号)Y0~Y127←→SDO[1]~SDO[1024](通用数字输出信号)Y1000~Y1004←→UO[1]~UO[40](UOP输出信号)Y1005~Y1009←→WDO[1]~WDO[40](焊机输出信号)Y1010~Y1014←→WSTO[1]~WSTO[40](熔敷检测输出信号)Y1015~Y1019←→LDO[1]~LDO[40](激光焊机输出信号)Y1020~Y1024←→RDO[1]~RDO[40](机器人输出信号)Y1025~Y1026←→SO[1]~SO[16](操作盘输出信号)F0~F127←→GI[1]~GI[64](组输入信号)F128~F255←→AI[1]~AI[64](模拟信号输入)F1000~F1255←→(系统接口输入)G0~G127←→GO[1]~GO[64](组输出信号)G128~G255←→AO[1]~AO[64](模拟信号输出)G1000~G1255←→(作为与机器人控制装置的系统软件的接口使用)R0~R1499←→(通用内部继电器)R9000~R9117←→(PMC系统管理领域)K0~K19←→(保持型内部继电器)D0~D2999←→(数据表)T0~T79←→(存放功能命令TMR(SUB3)的定时器值的领域)C0~C79←→(存放功能命令CTR(SUB5)的预置值、累计值的领域)PMC程序内置PMC功能是使梯形语言记录的PMC程序,在机器人控制装置内部高速运行的功能。
机器人原理图-V1.0

G41_POWER-V1 G41_POWER-V1.0.Sch GSM_VCC 232C_EN_1 232_VCC_1 GPS_EN GPS_VCC CAR_GND GND 3.3V V_CAR VCC GSM_EN CAR_BAT_CHK V_CAR_IN +5V PT_MOT-5V_CTRL LCD_BLA_VCC LCD_BLA_CTRL PT_Heat-5V_CTRL IC_CARD_VCC IC_CARD_VCC_CTRL 232C_EN_2 232_VCC_2 SD_VCC PT_MOT-5V PT_Heat-5V SD_EN-L GSM_VCC 232C_EN_1 232_VCC_1 GPS_EN GPS_VCC CAR_GND GND 3.3V V_CAR VCC GSM_EN CAR_BAT_CHK V_CAR_IN +5V PT_MOT-5V_CTRL LCD_BLA_VCC LCD_BLA_CTRL PT_Heat-5V_CTRL IC_CARD_VCC IC_CARD_VCC_CTRL 232C_EN_2 232_VCC_2 SD_VCC PT_MOT-5V PT_Heat-5V SD_EN-L DOORN_IN SPEED_IN CAN_RX CAN_TX SOS_IN CTRL_OIL_OUT L_TURN_IN SPARE_IN R_TURN_IN BEAM_IN 3.3V +5V GND V_CAR ACC_IN 232_TX3 232_RX3 SPK2P SPK2N MIC2P MIC2N CAR_GND V_CAR_IN 232_TX0 232_RX0 232_VCC_1 BRACK_IN 485-A 485-B SPAREN_IN 34119-CTRL 232_VCC_2
机器人电路基础知识
• XTAL1、XTAL2:外部时钟的输入输出端。
CD4012B • 8输入与非门:74LS30、CD4078 • 13输入端:74LS133(13输入端)
7/21/2021
机器人电路基2础3知识
RoboGame2009
数字器件
或非门: • 2输入端四或非门:74LS02、CD4001B • 3输入端双或非门:CD4000B(+反相器) • 4输入端双或非门:CD4002B
过电流检测保护使用芯片的检测引脚使用电流传感器使用电流传感器干簧管线圈保护过流自恢复元件robogame2009直流电机的精确控制?直流电机虽然强劲有力使用方便但控制精度较差为此有的直流电机在其内部装有测速电机或数字码盘
电子元器件
7/21/2021
机器人电路基础
1
知识
USTC
电阻
• 电阻有阻碍电子流动的功能,在电路中用它来限 制电流的大小或降低某点的电压。
OC门
• OC(open collector):集电极开路
7/21/2021
机器人电路基2础9知识
RoboGame2009
OC门作用
1.可以线与 (输出端直接相连实现与) 2.实现电平转换,可以作为接口电路
前级标准高电平为VH=3v 后级输入输出的标准高电平为VH=12v
7/21/2021
机器人电路基3础0知识
机器人电路基础知识
RoboGame2009
三极管
• PNP型和NPN型 • 工作方式:共基极、共发射极、共集电极 • 可以工作在放大和开关两种状态下,机器人中主
要工作在导通和截止的开关状态。 • 小功率:9012及9013;中功率:8050及8550;
大功率:772及882
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RS232-TTL RXD RS232-TTL TXD
U2 TXD U1 RXD U2 RXD
超声波 模块接口
U1 P3.1 U1 P3.2 U1 P3.3 U1 P3.4 U1 P3.5
电动机 1接口
+7.2V
STC89C52RC
U2 P3.1 U2 P3.2 U2 P3.3 U2 P3.4 U2 P3.5
+5 +5 +5
直流电机驱动电路
1K 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 * VSS VDD VL RS R/W E D0 D1 D2 D3 D4 D5 D6 D7 BLA BLK +5 10uF 32KHZ 1 2 3 4 VCC2 VCC1 X1 SCLK X2 I/O GND RST DS1302 33PF 1602 LCD +5 1 2 3 4 NC NC NC GND AT24C02 VCC WP SCL SDA 8 7 6 5 U1 P3.0 U1 P3.1 U1 P3.2 U1 P3.3 U1 P3.4 U1 P3.5 U1 P3.6 U1 P3.7 1 2 3 4 5 6 7 8 U1 P2.0 U1 P2.1 U1 P2.2 U1 P2.3 U1 P2.4 U1 P2.5 U1 P2.6 U1 P2.7 1 2 3 4 5 6 7 8 U1 P1.0 U1 P1.1 U1 P1.2 U1 P1.3 U1 P1.4 U1 P1.5 U1 P1.6 U1 P1.7 8 7 6 5 U1 P1.5 U1 P1.3 U1 P1.0 U1RST 10uF U1RST 10uF U1 P3.2 U1 P3.3 U1 P3.4 U2 P3.2 U2 P3.3 U2RST U2 P3.4 U2RST U2 P3.0 U2 P3.1 U2 P3.2 U2 P3.3 U2 P3.4 U2 P3.5 U2 P3.6 U2 P3.7 1 2 3 4 5 6 7 8 U2 P2.0 U2 P2.1 U2 P2.2 U2 P2.3 U2 P2.4 U2 P2.5 U2 P2.6 U2 P2.7 1 2 3 4 5 6 7 8 U2 P1.0 U2 P1.1 U2 P1.2 U2 P1.3 U2 P1.4 U2 P1.5 U2 P1.6 U2 P1.7 10K 10K
P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 EA P4.1 ALE/PROG PSEN P2.7/A15 P2.6/A14/ P2.5/A13
U2 P1.5 U2 P1.6 U2 P1.7 U2 RST U2 P3.0
P1.5 P1.6 P1.7 RST RXD/P3.0 P4.3/INT2 TXD/P3.1 INT0/P3.2 INT1/P3.3 T0/P3.4 T1/P3.5
WR/P3.6 RD/P3.7 XTAL2 XTAL1 VSS P4.0 A8/P2.0 A9/P2.1 A10/P2.2 A11/P2.3 A12/P2.4
WR/P3.6 RD/P3.7 XTAL2 XTAL1 VSS P4.0 A8/P2.0 A9/P2.1 A10/P2.2 A11/P2.3 A12/P2.4
P1.4 P1.3 P1.2 P1.1/T2EX P1.0/T2 P4.2/INT3 VDD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3
P1.4 P1.3 P1.2 P1.1/T2EX P1.0/T2 P4.2/INT3 VDD P0.0/AD0 P0.1/AD1 P0.2/AD2 P0.3/AD3
RS232-TTL RXD
电 源指 示
12MHZ 10K 1 2 3 4 5 6 7 8 9 10 11 12 13 14 TXD OSC2 DTR_N OSC1 RTS_N PLL_TEST VDD_325 GND RXT NC RI_N GP1 GND GP0 NC GND DSR_N VCC_5 DCD_N NC CTS_N GND SHTD# VO_3V3 EE_CKL DP EE_DATA DM PL2030HX 28 27 26 25 24 23 22 21 20 19 18 17 15 16 U1 VCC U1 P0.0 U1 P0.1 U1 P0.2 U1 P0.3 U1 P0.4 U1 P0.5 U1 P0.6 U1 P0.7 1 2 3 4 5 6 7 8 9 +5 U2 P0.0 U2 P0.1 U2 P0.2 U2 P0.3 +5 U2 P0.2 U2 P0.3 U2 P0.4 U2 P0.5 U2 P0.6 U2 P0.7 1 2 3 4 5 6 12 11 10 9 8 7 U1 P3.2 U1 P3.3 U1 P3.4 U1 P3.5 U1 P3.6 U1 P3.7
100uF 2 5V稳压 芯片
U1
33 U1 P0.4 32 U1 P0.5 31 U1 P0.6 30 U1 P0.7 29 U1 VCC 28 27 26 25 U1 P2.7 24 U1 P2.6 23 U1 P2.5 1 2 3 4 5 6 7 8 9 10 11
U2
33 U2 P0.4 32 U2 P0.5 31 U2 P0.6 30 U2 P0.7 29 U2 VCC 28 27 26 25 U2 P2.7 24 U2 P2.6 23 U2 P2.5 U2 P2.0 U2 P2.3 U2 P2.5 U2 P2.4 U2 P2.1 U2 P2.2
33PF
时钟芯片
10K
10K
U1 P1.6 U1 P1.7
LCD +5V
复位电路
EEPROM
按键电路
U1 U2口扩展接口
电源供电选择
U1 VCC U1 P0.0 U1 P0.1 U1 P0.2 U1 P0.3
P0口上拉电阻
LCD和蓝牙串口电源开关
蓝牙串口
+5V RXD TXD GND
编程按钮
U1 TXD
USB +5V
44 43 42 41 40 39 38 37 36 35 34
44 43 42 41 40 39 38 37 36 35 34
U1 P2.5 U1 P2.6 U1 P2.7 U1 P0.0 U1 P0.1 U1 P0.2 U1 P0.3 U1 P0.4 U1 P0.5 U1 P0.6 U1 P0.7 U1 P2.4 U1 P2.3 U1 P2.2
12864 LCD
U1 P2.5 U1 P2.6 U1 P2.7 U1 P0.0 U1 P0.1 U1 P0.2 U1 P0.3 U1 P0.4 U1 P0.5 U1 P0.6 U1 P0.7
M1
C2 XTAL3 30PF C1 30PF Y1 XTAL4 11.0592MHZ
C2 XTAL2 30PF C1 30PF Y1 XTAL1 11.0592MHZ
12 U1 P3.6 13 U1 P3.7 14 XTAL3 15 XTAL4 16 17 18 U1 P2.0 19 U1 P2.1 20 U1 P2.2 21 U1 P2.3 22 U1 P2.4
P0.4/AD4 P0.5/AD5 P0.6/AD6 P0.7/AD7 EA P4.1 ALE/PROG PSEN P2.7/A15 P2.6/A14/ P2.5/A13
程序下载转换开关
U2 P1.0 U2 P1.1 U2 P1.2 U2 P1.3 +5 GND
+5 U2 6 11 5 7 10 12 EN A EN B IN1 IN2 IN3 IN4 VSS +VS OUT1 OUT2 OUT3 OUT4 SENSE A SENSE B GND 9 4 2 3 13 14 1 15 8
STC89C52RC
+7.2V电机供电
U1 P1.5 U1 P1.6 U1 P1.7 U1 RST U1 P3.0
1 2 3 4 5 6 7 8 9 10 11
P1.5 P1.6 P1.7 RST RXD/P3.0 P4.3/INT2 TXD/P3.1 INT0/P3.2 INT1/P3.3 T0/P3.4 T1/P3.5
12 U2 P3.6 13 U2 P3.7 14 XTAL2 15 XTAL1 16 17 18 U2 P2.0 19 U2 P2.1 20 U2 P2.2 21 U2 P2.3 22 U2 P2.4
U2 P1.4 U2 P1.5 4.7K U2 P1.6 U2 P1.7
L298N
电动机 2接口 M2
3) 第3个脚 和第 2个脚 接在一 起表示
主板 供电和 电机供 电使用 同一电 源。
+5 1K5 27 27 USB +5V 22uF 104 10K 4 3 2 1 USB U2 VCC U2 P0.0 U2 P0.1 U2 P0.2 U2 P0.3 U2 P0.4 U2 P0.5 U2 P0.6 U2 P0.7 1 2 3 4 5 6 7 8 9 U1 P3.5 ringht
100uF +5V OUT 4K7 2
100uF
蜂鸣器
USB 转 RS232( TTL)
U1 P1.4 U1 P1.3 U1 P1.2 U1 P1.1 U1 P1.0
U2-8个传感器接口 U1-2测速传感器输入接口
U2 VCC U2 P0.0 U2 P0.1 U2 P0.2 U2 P0.3 U2 P1.4 U2 P1.3 U2 P1.2 U2 P1.1 U2 P1.0 +5 U1 P21 U1 P20 J? 1 2 3 4 5 1 GND Vin Vout 3 100uF LCD +5V 1 2 4 3
LCD +5V LCD +5V 10K 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 2K2 10K LCD+5V VSS VDD VO RS(D/I) R/W E DB0 DB1 DB2 DB3 DB4 DB5 DB6 DB7 PSB NC /RES NC LED+ LED-