东元伺服基础知识
东元(TECO)TSDA伺服说明书

301 300W 401 400W
751 750W 102 1KW
551 550W 102 1KW
152 1. 5KW 202 2KW
302 3KW
A 1000 rpm B 2000 rpm
C 3000 rpm G 3000 rpm
1 110V
2 220V
7F 2000 P/R 7H 2500 P/R
TB CN1 CN2
CN1 CN2
BRAKE
CN1
(Line Driver)
CN1
(Open Collector)
CN1
CN1
1 2
2
3
4
5
6 7 8 9 10 11 12
13
14 15 16 17 19 20 20 21 21
22
23 24 25 26
Fn Pn
Dn Er
RS232
CN1 CN1
DATA SET
RS232
COM
CN1
CN2
R S
~
P
R PC
U
V M
W
FG
FG
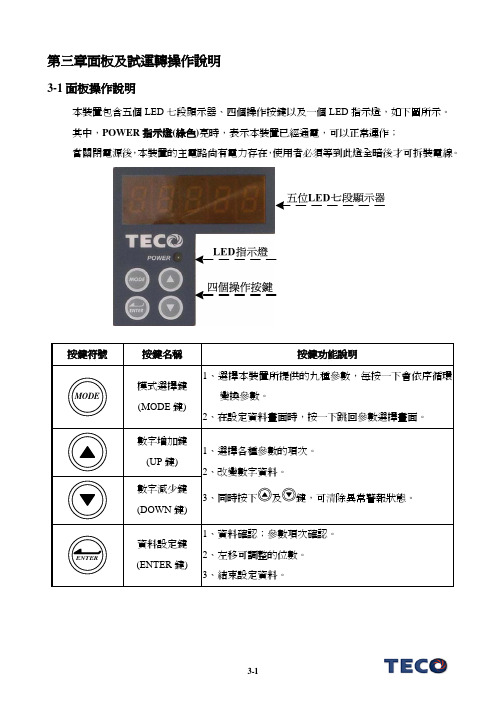
MODE (MODE SET)
CN2
CN1
r
s~
R
S ~~
T
P PC
P1 U VM W FG
() p
()
()
q
DATA SET
(DATA SHIFT)
TSDA50C TSDA75C
TSDA50C-MB202B27F
MODE p q DATA
广州科沃—工控维修的120 www.gzkowo.com
27
28 28 31
32 33 39
东元伺服JSDE中文说明书11

達共振,導致電流過大造成馬達過負載。
3、在許可範圍內延長加減速時間或減低負載慣量。
※此訊息通常發生於動作中,如果動作沒多久就發
生異常警報,請先作第1項檢查。
驅動器過電流
1、檢查馬達端接線(U、V、W)及編碼器接線是否
功率晶體異常
正常,並請依照第二章的馬達及電源標準接線
驅動器主迴路電流超出保護範
圖接續外部電源。
記憶體異常
拆掉所有接頭,當電源ON時仍發生警報,需更換驅
參數寫入時發生錯誤。
動器。
緊急停止作動
1、解除輸入接點 EMC 動作。
當輸入接點 EMC 動作時產生此 2、驅動器內部受雜訊干擾造成,請依照第二章的
異常警報。
馬達及電源標準接線圖及控制信號標準接線圖
※至於是高電位動作,還是低電
接續外部電源及信號線。
開關 重置
電源 重置
開關 重置
開關 重置
8-4
異常警報清除方式說明: 1、開關重置:可以利用以下兩種方式清除異常警報:
(a) 輸入接點重置:當異常排除後,先解除輸入接點 SON 動作(亦即解除馬達激磁狀態), 再使輸入接點 ALRS 動作,即可清除異常警報,使驅動器回復正常運作。至於輸入接 點是高電位動作,還是低電位動作,請參閱 Hn 參數設定。
外部電源電壓低於額定電源電壓 合規格。若仍無法解決,可能驅動器內部元件故障。
(約190V)。
※此訊息通常發生於電源送入驅動器時。
Байду номын сангаас
電源電壓過高
1、請使用電表量測外部電源電壓,確認輸入電壓
(回生異常)
是否符合規格。
1、外部電源電壓高於額定電源電 2、確認參數 Cn012 是否依規定設定。
东元伺服JSDE中文说明书5
馬達回授-旋轉一圈內的脈波數
Un-15 (絕對值)
pulse 從電源開啟後,以絕對值顯示馬達旋轉一圈內的脈波數。
Un-16 脈波命令-旋轉圈數(絕對值)
rev 從電源開啟後,以絕對值顯示脈波命令輸入的圈數。
脈波命令-旋轉一圈內的脈波數
Un-17 (絕對值)
pulse 從電源開啟後,以絕對值顯示脈波命令輸入一圈內的脈波數。
若可設定範圍大於 4 位數,負值顯示時,所有位數的小數 點皆亮,例如 Pn317(內部位置命令 1-圈數)。
正值顯示 3000
30000
負值顯示 -3000
-30000
本裝置負值設定操作說明如下:
(1)若可設定的數值範圍小於或等於 4 位數,例如將 Sn201(內部速度命令 1)=100 設定成-100
东元伺服JSDE中文说明书7

馬達旋轉方向定義(從馬達負載端看)
CCW
CW
當轉矩或是速度命令為正值時,從馬達負載端看的旋轉方向
0
Cn004 設定如下:
S
0
X│
設定
說明
T 3
轉矩控制
速度控制
0 逆時針方向旋轉(CCW) 逆時針方向旋轉(CCW)
1 順時針方向旋轉(CW) 逆時針方向旋轉(CCW)
2 逆時針方向旋轉(CCW) 順時針方向旋轉(CW)
5-2-7 其他轉矩控制機能
本章節說明其他跟轉矩控制相關機能。
轉矩到達機能
當正向或是反向轉矩超過 Tn108(轉矩到達判定值)所設定的準位時,輸出接點 INT 動作,
說明如下:
參數 代號
名稱與機能
設定 預設值 單位
範圍
轉矩到達判定值 Tn108 當正向或是反向轉矩超過所設定之準位時,輸出接點 INT 動 0
5-6
下圖為外部類比速度限制命令接線圖:
驅動器
類比速度限制輸入 (0~10V)
PIC CN1-25
AG CN1-13
FG
而內部三段速度限制設定如下,設定值代表馬達 CCW 和 CW 方向的速度限制值。
參數 代號
名稱與機能
設定 預設值 單位
範圍
內部速度限制 1
在轉矩控制時,可利用輸入接點 SPD1、SPD2 切換三組內部
參數 代號
名稱與機能
設定 預設值 單位
範圍
轉矩命令平滑濾波器 Cn034 當系統產生尖銳振動噪音,可以調整此參數來抑制振動噪 0
音,加入此濾波器同時會延遲伺服系統響應速度。
0 Hz │
1000
控制 模式
ALL
东元TSTE交流伺服系统简易手册
警告
y 不可在送電中,實施配線工作。 y 輸入電源切離後,伺服驅動器之狀態顯示 POWER LED 未熄滅前,請勿觸摸電路或更
換零件。 y 伺服驅動器的輸出端 U、V、W,絕不可接到 AC 電源。
! 注意
y 當伺服驅動器安裝於控制盤內,若周溫過高時,請加裝散熱風扇。 y 不可對伺服驅動器作耐壓測試。 y 機械開始運轉前,確認是否可以隨時啟動緊急開關停機。 y 機械開始運轉前,須配合機械來改變使用者參數設定值。未調整到相符的正確設定值,
2-2 I/O 信號端子說明 ................................................................................................................ 83 2-2-1 CN1 控制信號端子說明 ............................................................................................. 84 2-2-2 CN2 編碼器信號端子說明 ......................................................................................... 85
第二章 配線準備
2-1 系統組成及配線 ................................................................................................................. 76 2-1-1 伺服驅動器電源及週邊裝置配線圖.......................................................................... 76 2-1-2 伺服驅動器配線說明.................................................................................................. 77 2-1-3 電線規格...................................................................................................................... 78 2-1-4 馬達端出線.................................................................................................................. 79 2-1-5 馬達及電源標準接線圖.............................................................................................. 81 2-1-6 TB 端子說明 ............................................................................................................... 82 2-1-7 馬達附機械式剎車(BRAKE)接線說明 ..................................................................... 82
第2章伺服控制基础知识ppt课件

在伺服系统中测角度〔角位移〕的方法很多,常用的有电位计、差动变 压器、微动同步器、自整角机、旋转变压器等,这里引见部分丈量元件。 ---测小角位移
(一)差动变压器和微同步器
1.差动变压器
励磁
直线位移式
输出
转角式
差动变压器
2.微动同步器
微动同步器由四极定子和两极转子组成。在定子每个极上 绕有两个线圈〔初级在里侧,次级在外侧〕。用各极中的一 个线圈串联成初级激磁回路,各极中的另一线圈那么串联成 次级感应回路。
数字测速方法
在闭环伺服控制系统中,根据脉冲 计数来丈量转速的方法有M法测速﹑T 法测速和M/T法测速三种:
M法测速是指:在规定时间间隔Tg内, 丈量所产生的脉冲数来获得被测速度 值;
T法测速是指:丈量相邻两个脉冲的时 间间隔Ttach来确定被测速度值;
M/T法测速是指:同时丈量检测时间和
二、角度〔角位移〕检测
• 位量检测元件的分类和特点
经常用于数控机床的位置检测元件有旋转变压器、感 应同步器、编码盘、光栅和磁尺等。
分类:
☆ 安装的位置及耦合方式—直接丈量和间接丈量;
☆ 丈量方法
—增量型和绝对型;
☆ 检测信号的类型
—模拟式和数字式;
☆ 运动型式
—回转型和直线型;
☆ 信号转换的原理
—光电效应、光栅效应、电磁感应原理、
信号型的微动同步器实践上是一种高准确度的变磁阻型 旋转变压器。对于一定的励磁电压和频率来说,在一定的转 子转角范围(普通为10度或12度)内,它的输出电压正比于转 子转角。
激磁回路的衔接原那么是:当将等幅交流电压加于其上时,在激磁电流
的某半周期内,各极上的磁通方向如图中箭头所示;次级感应回路的衔接 原那么是:使总的输出电压是Ⅱ 、Ⅲ极和I 、Ⅳ极上感应电压之差。
东元TSDA伺服操作手册
东元T S D A伺服操作手册work Information Technology Company.2020YEARAC 伺服系統 TSDA系列安裝、操作手冊TSDA15B-CB301C27F開箱注意事項伺服驅動器機種確認伺服馬達機種確認 •••••••••••••••••••••••••••••伺服驅動器與伺服馬達搭配對照表 ••••••••••••••••••••••1 2 2驅動器外觀及面板說明 •••••••••••••••••••••••••••• 驅動器尺寸圖TSDA15B 尺寸圖TSDA20B 尺寸圖TSDA30C 尺寸圖 TSDA50C 尺寸圖 TSDA75C 尺寸圖 •••••••••••••••••••••••••••••• 3•••••••••••••••••••••••••••••• 4驅動器安裝方法安裝場所 環境條件安裝方向及間隔 •••••••••••••••••••••••••••••• 5馬達尺寸圖CB 系列120W •••••••••••••••••••••••••••••••• CB 系列300W •••••••••••••••••••••••••••••••• CB 系列750W •••••••••••••••••••••••••••••••• CC 系列 •••••••••••••••••••••••••••••••••• MB 系列 ••••••••••••••••••••••••••••••••••馬達端出線( CB 、CC 系列) ••••••••••••••••••••••••••馬達端出線( MB 系列) •••••••••••••••••••••••••••• 6 7 8 9 10 11 12馬達安裝方法安裝場所 環境條件 安裝方式其他注意事項•••••••••••••••••••••••••••••••13配線注意事項 ••••••••••••••••••••••••••••••••• 14 使用電線規格 ••••••••••••••••••••••••••••••••• 15TB (端子座)接腳說明 •••••••••••••••••••••••••••• 16CN1(控制信號接頭)接腳說明 •••••••••••••••••••••• 17∼19 CN2(編碼器信號接頭)接腳說明 ••••••••••••••••••••••• 20 馬達附機械式剎車時(BRAKE )接線說明 •••••••••••••••••• 20 驅動器各種輸入及輸出信號迴路形式圖 •••••••••••••••••••• 21CN1、CN2接腳位置圖 •••••••••••••••••••••••••••• 21 馬達及電源標準接線圖 控制信號標準接線圖•••••••••••••••••••••••••••• 2223 24 25 26位置控制CN1接線圖(Line Driver) ••••••••••••••••••••••• 位置控制CN1接線圖(Open Collector) •••••••••••••••••••••• 速度控制CN1接線圖 ••••••••••••••••••••••••••••• 扭力控制CN1接線圖 •••••••••••••••••••••••••••••驅動器面板操作說明•••••••••••••••••••••••••••••• 27輔助功能說明(Fn)輔助功能一覽表•••••••••••••••••••••••••••••• 28輔助功能操作方式•••••••••••••••••••••••• ••• 28∼31使用者參數設定模式說明(Pn)參數設定操作方式•••••••••••••••••••••••••••••• 32使用者參數一覽表•••••••••••••••••••••••• ••• 33∼39資料監視功能說明(Dn)資料監視操作方式•••••••••••••••••••••••••••••• 40監視模式資料一覽表••••••••••••••••••••••••••••• 41馬達型式對照表••••••••••••••••••••••••••••••• 42驅動器異常警報說明及對策(Er)異常警報一覽表••••••••••••••••••••••••••••• 43∼44通訊功能(RS232)通訊接線說明•••••••••••••••••••••••••••••••• 45通訊協定及格式說明••••••••••••••••••••••••••• 45∼46通訊位址說明•••••••••••••••••••••••••••••• 46∼47運轉運轉前注意事項試運轉步驟••••••••••••••••••••••••••••••••• 48位置控制運轉調整方式••••••••••••• • ••••••••••••• 49CN1簡易接線圖••••• • •••••••••••••••••••••• 50位置控制相關參數•••••••••••••••••••••••••• 51∼52速度控制運轉調整方式••••••••••••• • ••••••••••••• 53CN1簡易接線圖••••• • •••••••••••••••••••••• 54位置控制相關參數•••••••••••••••••••••••••• 55∼57附錄(一)電子齒輪比計算方式•••••••• •• ••••• •••••• •• • 58附錄(二)信濃伺服馬達規格表•••••• •• ••••• • • •••••• ••• 59附錄(三)東元伺服馬達編碼說明、規格表及尺寸圖••• • • •••••• • 60∼63開箱後注意事項• 檢查驅動器有無損傷。
东元单相伺服电机220v解释
东元单相伺服电机220v解释【实用版】目录1.东元单相伺服电机 220v 概述2.东元单相伺服电机 220v 的特点3.东元单相伺服电机 220v 的型号和参数4.东元单相伺服电机 220v 的应用领域5.东元单相伺服电机 220v 的代理商和购买途径正文一、东元单相伺服电机 220v 概述东元单相伺服电机 220v 是一款由台湾东元集团生产的高性能电动机,适用于工业自动化控制领域。
这款电机采用交流伺服技术,具有高精度、高性能、高效率等优点,可以满足各种不同场合的使用需求。
二、东元单相伺服电机 220v 的特点1.起动转矩大:由于转子电阻器大,使得电机在起动时具有较大的转矩,有利于提高起动性能和负载能力。
2.控制精度高:采用数字控制技术,可以实现高精度的位置控制和速度控制,满足各种复杂控制需求。
3.抗干扰能力强:具有较强的抗电磁干扰和抗振动能力,能够在恶劣的环境条件下稳定工作。
4.维护方便:东元单相伺服电机 220v 的结构简单,维修保养方便,降低了使用成本和维护难度。
三、东元单相伺服电机 220v 的型号和参数东元单相伺服电机 220v 有多种型号,如 JSMA 系列、TSTA 系列等,不同型号的电机具有不同的参数,如马达惯量、马达转速、额定功率等。
具体型号和参数可以查询东元官方网站或咨询授权代理商。
四、东元单相伺服电机 220v 的应用领域东元单相伺服电机 220v 广泛应用于工业自动化设备、机器人、数控机床、纺织机械等领域,为各种生产流程提供高效、精确的驱动力。
五、东元单相伺服电机 220v 的代理商和购买途径东莞富创是东元单相伺服电机 220v 的官方指定代理商,负责在东莞地区的销售和服务。
伺服的基础知识及简单应用
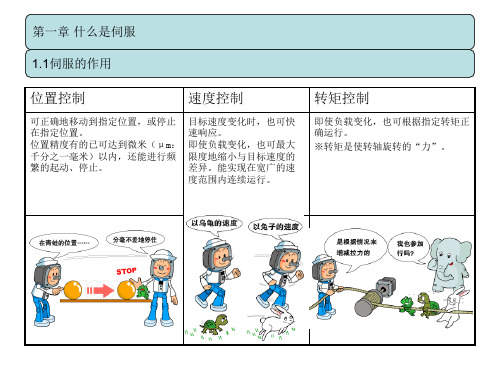
第一章 什么是伺服 1.2.6 电子零件组装设备
装配机· 插片机 电路板检测
将电子零件(IC芯片、电阻、电容器等)安装在印 刷电路板上。要求正确的定位和高速性能。
检查电子零件(IC芯片、电阻、电容器等)是否已 正确牢固地安装在印刷电路板上。有时还要对电路 板进行检测。
第一章 什么是伺服 1.3 伺服的原理和构成
定位控制的要求是“始终正确地监视电机的旋转状态”,为了达到此目的而使用检测伺服电机旋转状态 的编码器。而且,为了使其具有迅速跟踪指令的能力,伺服电机选用体现电机动力性能的起动转矩大而 电机本身惯性小的专用电机。
第一章 什么是伺服 1.3.2 位置控制模式
(b) 定位控制基本特点 伺服系统的定位控制基本特点如下所述。 机械的移动量与指令脉冲的总数成正比。 机械的速度与指令脉冲串的速度(脉冲频率)成正比。 最终在±1个脉冲的范围内定位即完成,此后只要不改变位置指令,则始终保持在该位置。(伺服 锁定功能)
第一章 什么是伺服 1.2.2 卷材设备
处理纸、薄膜等超长材料(卷材)的设备,也称为卷筒。大致可分为开卷、加工和卷绕。加工处理随应 用领域(纵向剪切机、层压机、印刷)而异,但整个机构基本相同。 常规机构图 :
纵向剪切机
层压机
纵向剪切机是将经过加工部处理的卷材在最终工序 卷绕部进行裁切的机械。控制张力的同时,用裁切 器正确地裁切是关键。
第一章 什么是伺服 1.3.1 伺服的控制环
从信号的流程着眼,伺服的构成如下图所示。
在AC伺服系统中,对装在伺服电机上的编码器所发出的脉冲信号或伺服电机的电流进行检测,将结果 反馈至伺服放大器,并根据这个结果按照指令来控制机械。该反馈有以下3种环。
位置环
速度环 电流环
伺服基础培训资料全

放大器 力矩指令 +
(不可控制转速)
-
力矩控制
・负载扭矩>产生扭矩・・马达被动停止 ・负载扭矩=产生扭矩・・・・停止
Tl
+T Tps
-
0
・负载扭矩<产生扭矩・・・・马达自行控制停止
产生力矩
负载力矩
Tcmd
+ Vα
16
伺服电机的结构
转子
定子
轴承
刹车
感应器
马达轴
刹车〔可选
转子〔永久磁石
半导体设备
机械加工
机器人
成型机
一般工业设备
医疗器械
20
• 伺服系统之应用 • 数控机床的应用 • 同步能力,快速响应能力,低速稳态控制能力
; • 匹配NC控制器的能力,网络化能力等 • 中高端产品的供应商集中在西门子、Fanuc
等 • 主要是强调轨迹控制和插补控制能力.
21
• 伺服系统之应用 • 包装印刷行业的应用 • 同步控制能力,张力控制,网络化能力等; • 横切功能:飞剪、追剪等; • 电子凸轮功能 • 无轴〔电子轴传动技术,主要技术供应商为德国的博世力士乐、
27
• 案例二:排料
28
感谢聆听! Thanks
29
知识回顾 Knowledge Review
CNC 插补 指令
位置控制单元
+ -
位置控制调 节器
速度控制单元
+
-
速度控制 调节与驱动
机械执行部件
实际 位置 反馈
实际 速度 反馈
检测与反馈单 元
电机
8
指令信号 〔位置、速度、力矩
伺服马达
东元EA180伺服驱动器简易手册说明书

简易用户手册EA180模拟量脉冲型伺服驱动器安全注意事项安全定义:在本手册中,安全注意事项分以下两类;危险:由于没有按要求操作造成的危险,可能导致重伤,甚至死亡的情况;注意:及设备损坏的情况;请用户在安装、调试和维修本系统时,仔细阅读本章,务必按照本章内容所要求的安全注意事项进行操作,如出现因违规操作而造成的任何伤害和损失均与本公司无关。
开箱时发现包装进水、部件缺少或有部件损坏时,请不要安装!有损伤的伺服驱动器或缺件的伺服驱动器不要使用,有受伤的危险!注意事项●输出侧有压敏器件或改善功率因素的电容的情况伺服驱动器输出是PWM波,输出侧若安装有改善功率因素电容或防雷用压敏电阻等,则易引发伺服驱动器瞬间过电流甚至损坏伺服驱动器,请不要使用。
●雷电冲击保护本系列伺服驱动器内装有雷击过电流保护装置,对于感应雷有一定的自我保护能力,对于雷电频发处客户还应在伺服驱动器前端加装保护。
●海拔高度与降额使用在海拔高度超过1000m的地区,由于空气稀薄造成伺服驱动器的散热效果变差,有必要降额使用,此情况请向我公司进行技术咨询。
●伺服驱动器报废时的注意主回路的电解电容和印制板上的电解电容在焚烧时可能爆炸,塑胶件焚烧时会产生有毒气体,请按工业垃圾进行处理。
保养、检查请对驱动器和电机进行定期保养和检查,以便安全使用保养和检查时的注意事项1)请操作者自行切断电源。
通电过程中,出现错误的动作时,请勿靠近电机及其驱动的机器。
2)切断电源后的短时间内,内部电路仍保持高电压充电状态。
检查作业前必须先切断电源,等待10分钟,并且确认充电灯完全熄灭。
3)如果一定要进行驱动器绝缘电阻测试时,必须切断与驱动器的所有连接。
在有导线及电机与驱动器连接的状态下进行绝缘电阻测试会损坏驱动器。
4)请勿使用汽油、稀释剂、酸性及碱性清洁剂,以免外壳变色或破损。
检查项目和周期正常使用条件1)伺服驱动器列表2)伺服驱动器外形尺寸安装孔加工图3)伺服驱动器各部分名称CHARGEL1C、L2CL1、L2、L3P+、 D、C电阻连接端子CN5电机编码器连接端子PECN4控制信号连接端子CN2、CN3RS485通讯端子CN6USB通讯端子U、V、WCN1模拟量监视信号端子4)储存环境条件本产品在安装之前请置于其包装箱内。
东元伺服说明书V02

东元伺服一、马达编码说明…………1二、驱动器型号说明1、伺服电机与驱动器应用表2、马达尺寸图及马达规格表4、伺服驱动器规格表6 5.1 TSTA6 5.2 TSDA8 5.3 ESDA8、驱动器外观尺寸图9 6.1 TSTA9 6.2 TSDA12 6.3 ESDA13、GMT系列产品说明及规格14、马达及驱动器附件15、伺服选型需求表17……………………………………………………………三………………………四………………………五………………………………高功能标准型驱动器规格………………普通标准型驱动器规格…………………经济型驱动器规格………………………六………………………………驱动器尺寸图……………………………驱动器尺寸图…………………………驱动器尺寸图…………………………七………………………八………………………………九…………………………………目 录东元伺服2B系列马达规格表(一)PIN:AMP 170360-1PIN:AMP 170360-11(kgf·cm)=0.0980665(N·m)221(gf·cm·s)=0.980665(kg·cm)34221(kgf·cm)=0.0980665(N·m) 1(gf·cm·s)=0.980665(kg·cm)5φ165φ1454-φ91302.56130φ110φ22526Lφ110φ22526L 5.1 TSTA高功能标准型驱动器规格785.3 ESDA经济型驱动器规格9※TSTA15及TSTA20尺寸图 6.1 TSTA驱动器尺寸图(一)10※TSTA30尺寸图TSTA驱动器尺寸图(二)11※TSTA50及TSTA75尺寸图TSTA驱动器尺寸图(三)12※TSDA20B尺寸图※TSDA30C尺寸图 6.2 TSDA驱动器尺寸图13※ESDA15B尺寸图※ESDA20B尺寸图※ESDA30C尺寸图 6.3 ESDA驱动器尺寸图300±30PIN:AMP 170360-1HOUSING:AMP 172167-1300±30PIN:AMP 770835-1HOUSING:AMP 172169-118.54-φ5.5,P.C.D.φ90φ100φ805φ505×5×25Name Platefor Spec.6076φ162528.53754858208.4113.4Name Platefor Notice300±30PIN:AMP 170360-1HOUSING:AMP 172167-1300±30D-TYPE,FEMALE,15PIN CONNECOTRName Platefor NoticeName Platefor Spec.4-φ6.5P.C.D.φ10022φ2590φ11690φ80φ192253242561.546.52086251.5148TSB07301C*T31T5TSB08751C*T31T514产品编号说明TSB07301C2GT31T5减速比:3、5、7、10编码器:2500P/RG:无刹车 K:附刹车07301C:300W08751C:750W产品规格产品特色·减小产品安装误差·整体尺寸小型化·提升组装作业效率·AC伺服产品性能径向力Radial Load轴向力Axial Load行星式减速机 Plandtary Gearhead·径向力为输出轴在1/2处, 可容许承受弯曲扭力;·径向力及轴向力和减速 机强度相同;·请注意使用方式,以免 影响产品寿命151617动作曲线及负载情况客户信息东元伺服D6028DESV-TED-07-01。
台湾东元伺服调试说明

TSDA系列东元数字交流伺服 安装调试说明书 (2003.11版本) 目 录 1. TSDA伺服连接示意图 2. 通电前的检查 3. 通电时的检查 4. TSDA伺服驱动器的参数设定方法 5. TSDA伺服驱动器的参数表 6. TSDA伺服驱动器的参数和性能优化调整 1. TSDA伺服连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在保修范围!) 2. 通电前的检查 1) 确认TSDA伺服驱动器和电机插头的连接,相序是否正确: A.MB中惯量电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C FG接地 D 注: 电机相序错误,通电时会发生电机抖动现象。
B.MB中惯量电机,带刹车制动器电机的连接: 伺服驱动器 电机插头 U B V I W F FG接地 E +24V刹车电源 A 刹车电源 C 2)确认伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4. TSDA伺服驱动器的参数设定方法 1) 按面板“MODE”键,选择显示到参数设定模式。
2) 用 ▲键和 ▼键,选择参数编号值增大或减小。
或用“DATA SET”键,移位。
3) 选择参数编号为想修改的参数号后,按住“DATA SET”键(一秒以上),显示出该参数号的参数值。
4) 用第2)步的方法,修改参数值。
5) 修改参数值完毕,按住“DATA SET”键(一秒以上),显示返回到参数号显示。
注:当参数值,最左边显示“H”时,表示参数为16进制。
认识东元伺服系
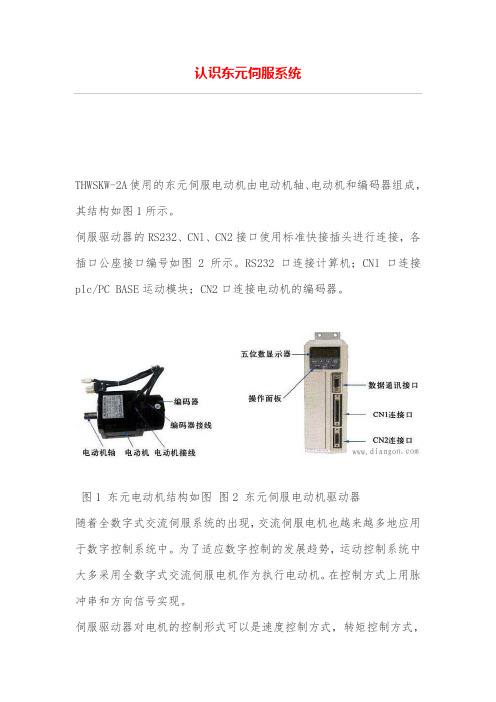
认识东元伺服系统
THWSKW-2A使用的东元伺服电动机由电动机轴、电动机和编码器组成,其结构如图1所示。
伺服驱动器的RS232、CNl、CN2接口使用标准快接插头进行连接,各插口公座接口编号如图2所示。
RS232口连接计算机;CNl口连接plc/PC BASE运动模块;CN2口连接电动机的编码器。
图1 东元电动机结构如图图2 东元伺服电动机驱动器
随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。
为了适应数字控制的发展趋势,运动控制系统中大多采用全数字式交流伺服电机作为执行电动机。
在控制方式上用脉冲串和方向信号实现。
伺服驱动器对电机的控制形式可以是速度控制方式,转矩控制方式,
位置控制方式。
在我们这台设备上主要是使用了速度控制。
速度控制和转矩控制都是用模拟量来控制的。
位置控制是通过发脉冲来控制的。
我们的设备在控制时主要是使用位置控制,也就是使用脉冲来控制电机的转动,从而控制了十字滑台的运动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特殊規格
0:無
1:防水
2:CE認証
其他規格
0:無
流水號
低慣量馬達規格表
規格項目\ 馬達種類
額定輸出
搭配驅動器
額定線間電壓
額定扭矩
額定相電流
額定轉速
瞬間最大扭矩
瞬間最大機子電流
轉矩常數
誘起電壓常數
轉子慣量
機子阻抗
機子感抗
機械時定數
電氣時定數
重量
絕緣等級
機
額定電壓
械
靜止摩擦扭力
式
轉子慣量
剎
消耗電流
車
重量
東元精電
AC伺服馬達………
東元精電
B、C系列(低、中慣量)、300W~3KW
※搭配TSDA系列數位式驅動器,機種齊全 ,能提供低轉速及高轉速的不同需求。
※低噪音、低振動。
※高精緻外觀、安裝容易。
※低轉子慣量設計提昇馬達在高速、高頻 率定位上的信賴性。
※品質保證,通過ISO9001要求。
系統使用範例
馬達使用時周圍溫度
符號
1(kgf .cm )=0.0980665 (N .m )
1(gf .cm .s²) =0.980665(kg.cm ²)
單位 TSB07301C TSB08751C TSC06201C TSC06401C TSC08751C
PR
W
300
750
200
400
750
TSDA15B TSDA20B TSDA15B TSDA20B TSDA30C
TSB7301 φ5.5 φ100 φ90 76 2 不附煞車
TSB8751 φ6.5 φ112 φ100 86 2
F GH J KLM 5 φ14 φ70 20 3 30 151.5 5 φ16 φ80 25 3 35 190 5 φ14 φ70 20 3 30 113.5 5 φ16 φ80 25 3 35 148
0.71
6.59
7.08
10.3
14
F級(155℃)
VDC 24V ±10﹪
15
15
0.725
0.725
0.59
0.59
1.2
1.7
0~40
東元精電
TSB13152A 1500
TSDA50C 194.4 14.327 7.45 1000 42.963 22.35 2.26 236.6 18.03 1.785 12.66
105.3 2.386
5 3000 7.159
15 0.533 55.792 1.12
2.6 5.07 0.935 1.954 3.5
2.352 0.225 0.44 1.94
低慣量馬達尺寸圖
B系列
型號
ABCDE
TSB7301 φ5.5 φ100 φ90 76 2 附煞車
TSB8751 φ6.5 φ112 φ100 86 2
速度限制 輸入指令範圍
通訊功能
JOG功能
CW/CCW(雙脈波)、Pulse+Dir(單脈波)、AB相( 90°相位差) 500K pps
1/127 ≦ A/B ≦ 127 (A&B=1~10000 ) 1:2000
【額定轉速下】負載 0~100%:-0.03%,電壓±10%:0.2%,溫度25 ±25℃:0.5% 0 ~±額定轉速【三種內部速度可經由輸入接點選擇】 0 ~ ±10V∕最大扭力
7.092 14
15 0.725 0.59
1.7
TSB13302C 3000
TSDA75C 199.7 9.545 14 3000 28.645 42 0.75 78.5 12.25 0.37 2.43 0.81 6.57 10.3
15 0.725 0.59
1.7
中慣量馬達尺寸圖
型號 TSB13551A TSB13102A TSB13152A TSB13102B TSB13202B TSB13302B TSB13152C TSB13302C
東元精電
C系列
型號
ABCDE FGH J KL
TSC06201 φ4.5 60 φ70 2 5 φ14 φ50 25 3 27 154.5
附煞車 TSC06401 φ4.5 60 φ70 2 5 φ14 φ50 25 3 27 176.5
TSC08751 φ5.5 80 φ90 2.5 6 φ19 φ70 30 3 37 185.5
附煞車 L(mm)
211.8 261.8 316.8 211.8 261.8 316.8 211.8 261.8
不附煞車 L(mm)
165.3 261.8 316.8 211.8 261.8 316.8 211.8 261.8
東元精電
數位式AC伺服驅動器
東元精電
……………………TSDA系列
※全數位控制,體積小 ※可分別選擇控制模式(位置、速度及扭力) ※多種設定值可由面板直接變更 ※面板顯示馬達運轉狀態或驅動器錯誤訊息 ※品質保證,具CE規格,通過ISO9001要求 ※搭配馬達(300W~3KW)
C系列 06:60 mm
08:86 mm 08:80 mm
13:130 mm
301:300W
401:400W
551:550W
馬達輸出功率
751:750W
102:1KW
152:1. 5KW
202:2KW
302:3KW
馬達額定轉速
A:1000 rpm C:3000 rpm
B:2000 rpm H:1500 rpm
Ra
Ω
550 TSDA30C
162.3 5.252 3.43 1000 15.758 10.3 1.679 175.9 6.37 5.37
機子感抗
La mH
27.5
機械時定數
Tm ms
1.21
電氣時定數
te
ms
5.12
重量
kgf
6.6
絕緣等級
機
額定電壓
械
靜止摩擦扭力
式
轉子慣量
剎
消耗電流
車
重量
馬達使用時周圍溫度
15.5
15.5
2.039
1.019
213.6
106.8
12.25
6.37
2.78
1.82
18.21
10.05
0.82
1.11
6.55
5.52
10.3
6.6
F級(155℃)
VDC 24V ±10﹪
15
8
0.725
0.675
0.59
0.58
1.7
1.2
0~40
規格項目\ 馬達種類
額定輸出
搭配驅動器
額定線間電壓
VT
V
TR
N.m
IR
A
NR
rpm
TP(N ) N.m
IP
A
KT N‧m/A
KE V/k rpm
JM
kg‧cm²
Ra
Ω
La
mH
Tm
ms
te
ms
kgf
107.7 0.95 2.0 3000 2.861 6.0 0.524 54.9 0.671 8.37 17.4 1.96 2.05 1.82
V N.m kg‧cm²
10 10.8 2.29 0.92 1.6 F級(155℃) VDC 24V ±10﹪ 1.176 0.098 0.45 0.68 0~40
77.53 1.274
4.4 3000 3.822 13.2 0.325 34.6 0.58
4 5.8 1.97 0.69 2
1.176 0.098 0.45 0.68
TSC06201 φ4.5 60 φ70 2 5 φ14 φ50 25 3 27 113
不附煞車 TSC06401 φ4.5 60 φ70 2 5 φ14 φ50 25 3 27 135
TSC08751 φ5.5 80 φ90 2.5 6 φ19 φ70 30 3 37 144
中慣量馬達規格表 1(kgf .cm )=0.0980665 (N .m )
JM kg‧cm²
Ra
Ω
La mH
Tm ms
te
ms
kgf
TSB13152C
1500 TSDA50C
200.3 4.782 7.06 3000 14.327 21.2 0.74 77.5 6.37 0.98 5.37 1.14 5.48
6.6
V N.m kg‧cm²
A kgf ℃
8 0.675 0.58
警報記憶功能
根據警報發生順序,自動記憶警報內容(十組)
機械式煞車控制 系統保護功能 編碼器分頻輸出
輸入信號 輸出信號 輔助電源
根據伺服ON_OFF狀態,自動控制煞車器輸出 過電流、過電壓、過負載、過速度、編碼器異常、記憶體異常、CPU異常
1∕N【N=1~16】編碼器信號分頻輸出
伺服ON、警報清除、編碼器歸零、正_反轉驅動禁止、指令脈衝禁止、偏差清除∕伺服閉鎖、控制方式切換 P∕PI切換、外部轉矩限制、內部速度選擇、緊急停止
使用電壓
1:單相100V 2 :單相200V 3:三相200V
機械式煞車
B:附煞車
N:無煞車
編碼器解析度
F:2000 p/r(9線出線) H:2500 p/r(9線出線) A:2000 p/r(15線出線) B:2500 p/r(15線出線)
馬達出線長度/方式 1:100 mm , 2:200 mm , ….etc. A:軍規接頭
TSDA系列驅動器規格表
驅動器規格機種