基于语音模块的汽车倒车防撞语音提示系统设计
基于单片机的倒车防撞预警系统毕业设计

基于单片机的倒车防撞预警系统毕业设计倒车防撞预警系统是一种能够帮助驾驶员在倒车过程中避免碰撞的设备。
本文基于单片机设计了一种倒车防撞预警系统,并进行了详细的介绍。
该系统主要由倒车传感器、控制电路、显示屏和蜂鸣器组成。
其中,倒车传感器用于检测车辆周围的障碍物,通过将传感器输出的数据传给控制电路进行处理。
控制电路根据接收到的传感器数据,计算出障碍物与车辆的距离,并控制显示屏和蜂鸣器发出相应的警报。
在设计中,我们选择了超声波传感器作为倒车传感器,因为它能够准确地测量障碍物与车辆的距离。
我们将超声波传感器固定在车辆的后部,并将其与单片机相连。
当车辆开始倒车时,超声波传感器开始工作,并将检测到的障碍物距离传给单片机。
单片机接收到传感器数据后,根据一定的算法计算出车辆与障碍物的距离,并根据距离的大小决定是否发出警报。
为了方便驾驶员了解障碍物的距离,我们在车辆驾驶室内安装了一个显示屏,用于显示障碍物与车辆的距离。
当障碍物与车辆的距离小于一定值时,系统还会通过蜂鸣器发出警报,提醒驾驶员注意。
在系统的设计过程中,我们考虑到了多种因素。
首先,我们要确保传感器的数据准确性,要选择合适的传感器并进行校准。
其次,我们要考虑到驾驶员对系统的操作是否方便,要保证显示屏和蜂鸣器能够清晰地传达信息。
最后,我们还要考虑系统的可靠性和稳定性,要进行充分的测试和优化。
倒车防撞预警系统可以提高驾驶安全性,避免驾驶员在倒车过程中因为盲区而发生碰撞。
我们通过基于单片机的设计,实现了一个简单有效的倒车防撞预警系统。
通过这个设计,我们还深入了解了单片机的应用和原理。
希望这个设计能够对相关领域的研究和开发工作提供一些参考和启示。
基于语音识别的车载语音控制系统设计与实现

基于语音识别的车载语音控制系统设计与实现随着科技的迅速发展,车载语音控制系统在汽车行业中的应用越来越广泛。
这种技术的实现需要借助于语音识别技术,以便实现车辆内部的各种操作和功能控制。
本文将探讨基于语音识别的车载语音控制系统的设计与实现。
1. 引言车载语音控制系统的出现为驾驶提供了便捷和安全性。
通过语音指令,驾驶员可以轻松地操作娱乐系统、导航系统和通信系统,而无需分散注意力。
本文将介绍设计和实现基于语音识别的车载语音控制系统的方法和步骤。
2. 语音识别技术语音识别技术是车载语音控制系统的核心。
它可以将驾驶员的语音指令转化为机器可以理解的文字或操作指令。
目前,深度学习技术在语音识别中取得了巨大的成功。
使用深度学习的语音识别模型能够识别和理解各种驾驶员的口音和语气,并将其准确地转化为指令。
3. 系统设计基于语音识别的车载语音控制系统由语音输入模块、语音识别模块、语义理解模块和操作执行模块组成。
a. 语音输入模块:该模块用于接收驾驶员的语音指令。
可以使用内置麦克风或外部话筒来接收声音。
b. 语音识别模块:该模块将语音指令转化为计算机可理解的文本或操作指令。
使用深度学习的语音识别模型可以提高识别的准确性。
c. 语义理解模块:该模块解析语音指令的含义,并将其映射到相应的操作或功能。
这涉及到自然语言处理和语义分析技术。
d. 操作执行模块:该模块基于语义理解模块的输出执行相应的操作或功能。
例如,打开音乐、调节温度、导航到特定目的地等。
4. 数据集和语音样本收集为了训练语音识别模型,需要大量的标注数据集和语音样本。
可以通过录制驾驶员在车内使用语音控制系统时的语音指令来收集样本数据。
这些样本数据应该涵盖不同的驾驶员、口音、语气和指令内容。
同时,还需要手动标注这些样本数据,以便训练语音识别模型。
5. 模型训练和优化使用收集到的数据集,可以使用深度学习框架训练语音识别模型。
目前,常用的深度学习框架包括TensorFlow、PyTorch和Keras等。
汽车倒车雷达预警系统的设计及实现

毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现学生姓名王阳学号********** 所在学院物理与电信工程学院专业班级通信1204班指导教师张文丽完成地点陕西理工学院2016年6月5日毕业论文﹙设计﹚任务书院(系) 物理与电信工程学院专业班级通信1204 学生姓名王阳一、毕业论文﹙设计﹚题目汽车倒车雷达预警系统的设计及实现二、毕业论文﹙设计﹚工作自__2015 __年__ 12 _月__ 日起至_ 2016__年 6 月日止三、毕业论文﹙设计﹚进行地点: 物电学院实验室四、毕业论文﹙设计﹚的内容要求:1、本次毕业设计要求如下:设计一个汽车倒车雷达预警系统,要求:⑴该系统可实现汽车倒车时车尾保险杠和障碍物之间的测距,并能够实时显示;⑵系统可预设测距报警的下限值,当实际测距小于预设值时,系统应报警提示,同时可实现对预设值的调整和修改;⑶报警方式要求有两种以上,以更好地提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
2、毕业设计成果要求:程序代码、硬件实物和论文,论文要求计算机打印(A4纸),论文有不少于3000词的相关英文中文翻译。
3、毕业设计时间安排:1—4周:查阅相关资料,熟悉题目内容,掌握设计原理,提交开题报告;5—10周:根据设计原理,进行相应软、硬件设计;11—12周:完善设计功能,整理资料并进行结果测试及分析;13—14周:毕业设计验收;15—16周:撰写、修改、提交毕业论文,毕业答辩。
指导教师系(教研室)系(教研室)主任签名批准日期接受论文 (设计)任务开始执行日期学生签名汽车倒车雷达预警系统的设计及实现王阳(陕西理工学院物理与电信工程学院通信工程专业1204班,陕西汉中 723001)指导教师:张文丽[摘要]汽车倒车雷达预警系统能在汽车倒车时为驾驶员提供周围障碍物信息,可降低倒车难度,避免驾驶员因方向感不强、判断和操作失误而引起的事故。
本课题设计了一个汽车倒车雷达预警系统,倒车时,驾驶者启动倒车雷达,在控制器的控制下,由装置于车尾保险杠上的探头发送超声波,遇障碍物产生回波信号,传感器接收到回波信号后经控制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出语音警示信号,以提示驾驶员车辆周边的情况,从而提高汽车倒车的安全性。
智能汽车防撞倒车报警系统设计

智能汽车防撞倒车报警系统设计摘要:近年来,人们的生活节奏逐步加快,在出行时对汽车的行驶速度要求更高,车辆在倒车时由于视野不足,在出现紧急情况时极易发生碰撞,造成很严重的交通事故。
智能汽车防撞倒车报警系统的主要设计是利用超声波在空中传播迅速的特点,通过发射机、介质、反射介质、接收机等组成一种距离测量系统。
实时的距离由数码管显示。
系统的硬件部分主要包括:主控模块STM32F103C8T6、超声波传感器模块、显示电路模块、键盘输入电路模块、声光报警模块、语音提示模块。
智能汽车防撞倒车报警系统采用STM32F103C8T6作为主控芯片,具有成本低、性能好等优点。
智能汽车防撞倒车报警系统的软件主要是以主程序为主导,还包含超声测距子程序、显示子程序、报警子程序和语音提示子程序。
通过对计算机进行软硬件的综合测试,使整个超声测距设备的整体性能得到提高。
智能汽车防撞倒车报警系统可以更好的帮助驾驶员在倒车过程中解决视角盲区的问题,提醒驾驶员泊车倒车过程中做出合理的操作,避免驾驶过程中发生不必要的意外和伤害,让整个泊车或倒车的过程更加的安全高效,从而提高驾驶的安全系数。
关键词:单片机报警超声波倒车系统一、研究背景随着科学技术的迅猛发展,经济实力的不断增强,人民生活质量的不断提高,无论是个人用车,还是交通运输车辆的出行安全成为了人们最为关注的问题,尤其是倒车盲区造成的隐患,基于STM32单片机的汽车倒车防撞警报系统应运而生。
该系统的开发旨在帮助驾驶员在倒车过程中克服了视角盲区的缺陷,提醒驾驶员泊车倒车过程中做出合理的操作,避免驾驶过程中发生不必要的意外和伤害,让整个泊车或倒车的过程更加的安全高效,从而提高驾驶的安全系数。
随着我国汽车产业的高速发展,汽车的数量逐年增加,造成了公路、街道、停车场、车库等越来越拥挤。
比如说停车场,越来越多的汽车使得汽车停车位越来越少,这就给驾驶技术不太熟练的驾驶员带来了不小的困难。
据初步调查统计,15%的汽车事故是由汽车倒车时“后视”不良造成的。
汽车倒车防撞告警器的设计

汽车倒车防撞告警器的设计摘要最近几年来, 随着中国经济的高速进展和居民生活水平的不断提高,居民拥有汽车的数量愈来愈多。
道路上、停车场变得愈来愈拥堵。
咱们驾车穿行、拐弯、倒车等总次数不断增加,而汽车驾驶员视野又是超级有限,碰撞和拖挂的事故时有发生,夜间就更不平安了。
驾驶员希望能有一种汽车报警系统,在行驶的时候能够不断测量车辆车尾与后面障碍物的距离(或车与车的距离)而且,能够在仪表板上显示出来,并在不同的警示距离范围发出不同的报警信号,以提高驾驶的平安性。
随着单片机技术在各领域普遍应用,使得由单片机组成的应用装置加倍灵活、稳固. 以往超声波技术在测量、测距等领域的应用是采纳超声波专用集成电路组成的,电路固定应用不灵活。
随着单片机技术的不断进展,单片机技术和超声波技术的不断结合,超声波技术的应用前景加倍广漠。
关键词:报警,超声波,传感器,测距Reversing alarm anticollision designAbstractWith the rapid economic development of china and continuous improvement of living standards in recent years, residents have more and more cars. So Roads and parking lots become more and more crowded. the total number of driving、turning、reversing is growing, while car drivers′vision is very limited, collision and trailer accidents often occur, even more unsafe at night. drivers hopes to have a car alarm system, which can measure the distance between the rear and the obstacle (or the distance among the vehicles) while driving; and the distance can be displayed in the dashboard in order to improve driving safety, the various alarm signals was given out with the different alarm scope . With SCM technology used widely in various fields, the application device made by the SCM becomes more flexible and stable. While in the past, the application of ultrasound technology in the measurement is formed by specific ultrasound integrated circuit, the inflexibility in the circuit fixed application often happened before. With the continuous development of SCM technology, SCM technology and ultrasonic technology continues to combine, ultrasound technology have much broader prospects.Keywords: warning、ultrasonic、sensors、location目录1绪论 (1)课题的背景及目的 (1)国内外研究状况 (1)课题研究方式 (1)2 课题的方案设计与论证 (3)系统整体设计 (3)设计方案的论证 (4)3 系统的硬件结构设计 (6)单片机的选择 (6)3.1.1时钟电路 (7)3.1.2复位RST 9脚 (8)发射电路的设计 (9)接收电路的设计 (11)显示报警模块的设计 (13)4 系统软件的设计 (17)超声波汽车防撞电路的算法设计 (17)主程序流程图 (18)超声波发生子程序和超声波接收中断程序 (20)总结 (21)致谢 (22)参考文献 (23)附录 (24)1绪论课题的背景及目的随着汽车工业的快速进展,拥有私家轿车的人愈来愈多,将会显现的交通问题也会随之愈来愈多。
汽车倒车防撞报警系统设计

汽车倒车防撞报警系统设计引言 (1)1.方案选择与分析 (2)1.1 实现功能 (2)1.2 系统总体方案介绍 (3)2.系统硬件设计 (4)2.1 SPCE061芯片特性 (4)2.1.1 SPCE061简介 (4)2.1.2 芯片特性 (5)2.2 电源模块 (5)2.3 放音模块 (6)2.4 超声波测距模组 (7)2.4.1 超声波谐振频率发生电路,调理电路 (7)2.4.2 超声波回波接受处理电路 (7)2.4.3 超声波测距模组电源接口 (8)2.4.4 超声波测距模式选择跳线 (8)2.5 转接板 (9)2.5.1 转接板电路 (9)2.5.2 显示电路 (10)3.系统软件设计 (11)3.1 软件结构 (11)3.2 超声波测距原理 (11)3.3 各模块程序说明 (13)3.3.1 超声波测距程序 (13)3.3.2 语音播放程序 (15)3.3.3 显示刷新程序 (17)3.3.4 主程序 (18)4.连接操作与说明 (20)结论 (22)参考文献 (23)引言倒车报警又称泊车辅助系统,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
一般由超声波传感器(俗称探头)、控制器和显示器等部分组成,现在市场上的倒车报警大多采用超声波测距原理,驾驶者在倒车时,启动倒车报警,在控制器的控制下,由装置于车尾保险杠上制器进行数据处理,判断出障碍物的位置,由显示器显示距离并发出警示信号,得到及时警示,从而使驾驶者倒车时做到心中有数,使倒车变得更轻松的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控。
倒车报警的提示方式可分为液晶、语言和声音三种;接收方式有无线传输和有线传输等。
本方案采用语音提示的方式,利用SPCE061A 单片机所具备的单芯片语音功能,外接三个超声波测距模组,组成一个示例的倒车报警系统,语音提示报警(0.35m~1.5m)范围内的障碍物。
基于单片机的红外汽车倒车防撞系统设计

基于单片机的红外汽车倒车防撞系统设计摘要:当前,由于司机不能看清后方或安全距离不够就进行倒车所引发的各种交通事故屡见不鲜。
为了减少此类事故的发生,该设计采用单片机、超声波模块以及红外壁障模块实施探测车身尾部是否有障碍物(人、动物、或其他物件等),并用语音报警系统和LCD显示提醒驾驶员注意倒车方向、车速及车距等,并详细地介绍了系统的设计,实验结果表明,该方案完全符合设计要求。
关键词:单片机超声波红外壁障语音报警LCD显示随着人民生活水平的高速发展和提高。
汽车作为一种交通工具,已快速融入人们的生活。
然而在给人们带来福音的同时,也带来各种麻烦。
当前,由于司机不能看清后方就进行倒车所引发的各种交通悲剧、纠纷已屡见不鲜。
每年全世界约有20万人死于倒车过程,40万人受伤于倒车过程,中国所占的比例约为总量的1/5左右[1]。
但城市里行驶的汽车又是城市交通工具的重要一大组成部分,是城市基础建设的主要设施之一,我们只能尽力去避免这些事故的发生。
在这些事故中,一般由于障碍物太低(如小孩在车的后面)和由于不能准确的计算障碍物的实际距离,从而导致凭反光镜看后方的司机仅不能具体看清障碍物及其距离,直接发生撞击事故[2]。
针对当今此类事故的频发,本文研究设计了一种基于单片机控制的汽车倒车防撞系统,该系统以功能强大的STC89C52单片机作为控制器,各功能模块对障碍物进行探测并收集处理数据,通过LCD显示和语音报警系统警示驾驶员小心倒车,尽量避免此类事故发生。
1 汽车倒车防撞系统的工作原理与结构设计框图该汽车倒车防撞系统中:一是要利用超声波测距模块实现自动测距,并送入单片机;二是要利用红外避障传感器,实现对后方的左右两侧障碍物进行自动测距。
单片机对二路信号进行综合分析后作出反应,一方面通过LCD模块适时显示障碍物距离车体的距离,另一方面根据障碍物离车体距离的远近发出不同的语音报警信号,以提醒驾驶员谨慎行驶,注意避让行人或障碍物;当传感器检测到车体距离人或障碍物到达最小安全距离时,单片机迅速做出反应关闭电机驱动模块,紧急刹车,以防止意外事故发生。
倒车语音提示系统的设计与实现
2 系统 硬 件 设 计
21 硬 件 系统 总体 框 图 . 本 系统 主要 由 发 射 电 路 、 收 电 路 、 示 电 路 、 制 器 电 接 显 控 路 组 成 。采 取 收 发 分 离 方 式 有 两 个 好 处 : 是 收 发 信 号 不 会 一
Ab t a t h s p p r i t d c s mi u e y r v ri g v ie a a m y t m o i e t l a o i i a c a u e n s r c :T i a e n r u e n tl e e sn o c r s se c mb n d wi u t s n c d s n e me s rme t o l h r t
1 超 声 波测 距 的 工 作 原 理
超 声 波 是 人 耳 听 不 到 的 一 种 波 ,人 耳 的 听 力 范 围 是 2 ~ 0 k z 即 2 z以 下 的 声 音 为 低 频 声 波 ,0 k z以上 的 0 2 H 。 0H 2 H
声 音 称 为 超 声 波 , 有 少 数 生 物 ( 蝙 蝠 、 豚 ) 能 感 觉 到 只 如 海 才
集 成 电路 C 2 16 是 一 款 红 外 线 检 波 接 收 的 专 用 芯 X 00A 片 . 用 于 电视 机 红外 遥 控 接 收 器 。考 虑 到 红外 遥 控 常用 的 常
载 波 频 率 3 H 与 测 距 的 超 声 波 频 率 4 Hz 为 接 近 , 8k z 0k 较 可
发 射 超 声 波 , 发 射 时 刻 的 同 时 开 始 计 时 。 超 声 波 在 传 播 的 在
收 稿 日期 : 0 2 0 — 4 2 1— 6 0 稿 件 编 号 :0 2 6 2 2 10 0 4
带语音播报功能的倒车雷达预警系统
毕业设计设计题目:超声测距单片机控制系统设计超声测距单片机控制系统设计摘要随着社会经济的发展交通运输业日益兴旺,汽车的数量大幅攀升,交通事故频发,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车防撞预警系统势在必行,超声波测距法是最常见的一种距离测距方法,本文介绍的就是利用超声波测距法设计的一种倒车防撞报警系统。
它的CPU是8位的,具有体积小,精度高,价格便宜的优点。
最后通过硬件和软件设计实现了各个模块的功能。
相关部分附有硬件电路图、程序流程图。
最终结果表明,此设计能很好地完成汽车倒车预警的任务,并能正常显示距离和进行相应的语音提示,能较好地运用到实际生活当中。
关键词:Ultrasonic Range Control System based onSingle-chipAbstractAs social and economic development of the transport industry booming, the number of cars rose sharply,and frequent traffic accidents happened.For this situation, designing a fast response, high reliability and more economical vehicle collision avoidance warning system is imperative , ultrasonic ranging method is the most common form of distance ranging method. The thesis designs a reversing collision alarm system based on an ultrasonic distance measurement method. Control system consists of the ultrasonic range finder and voice broadcast module.Micro-controller STC89C52 is used in the design , it is an 8-bit CPU, with small size, high accuracy, low price advantages. Ultrasonic Ranging Module uses HC_SR04 and voice broadcast module uses ISD1820. The entire circuit is modular in design, containing the main program module, display module, voice broadcast module, ultrasonic ranging module, the delay module and other components. The micro-controller provides more than 10us TTL level to trigger ultrasonic ranging module.The time difference from the transmitter to the receiver is calculated by the micro-controller and then micro-controller calculates the distance value. Whether display or voice broadcast is according to alarm range set by the chip. Finally,we achieve the function of each module by the design of hardware and software.The relevant part is accompanied by the hardware circuit and program flowchart.Final results show that this design can well accomplish the task of vehicle reversing warning, and can properly display the distance.The design can be well applied to real life with achieving the corresponding voice prompts.Key Word:目录1 绪论 (1)1.1论文研究目的及意义 (1)1.2国内外研究发展情况 (1)1.3论文研究内容 (2)2 控制系统主要硬件的介绍 (3)2.1单片机STC89C52选型 (3)2.1.1 STC89C52简介 (3)2.1.2 STC89C52引脚介绍 (4)2.2 超声波测距模块选型 (6)2.2.1 HC-SR04介绍 (6)2.2.2 超声测距模块构成 (9)2.3显示器件的选型 (10)2.3.1数码管的选型 (11)2.4 ISD1820语音芯片介绍 (12)2.4.1 管脚排列图 (12)2.4.2 芯片录音时间介绍 (12)2.4.3 实物图及使用说明 (12)3 硬件电路设计 (14)3.1单片机最小系统设计 (14)3.2超声波测距显示电路系统设计 (17)3.3 超声波系统设计 (17)3.4 语音系统设计 (19)4 系统软件部分设计 (20)4.1 预警系统主体部分流程图 (20)4.2主程序及启动超声测距部分 (22)4.2.1 主程序的初始化 (22)4.2.2 启动超声测距模块及调用计算 (22)4.3 延时子程序 (23)4.4 数码管扫描显示程序 (23)4.5 中断子程序 (24)4.5.1 定时器T0计数溢出程序设计 (24)4.5.2 定时器T1中断扫描和启动模块 (24)4.6 距离计算和语音报警子程序 (25)5 实物性能测试 (26)5.1 单片机测试 (26)5.2 程序调试 (26)6 编程和下载软件的介绍 (27)6.1 Keil的简介 (27)6.2 Altium Designer 9.0的简介 (33)6.3 STC_ISP_V480的简介 (35)7 结论 (38)谢辞 (38)参考文献 (39)附录1 源程序.................................................................................................. 错误!未定义书签。
基于单片机的倒车防撞预警系统设计
基于单片机的倒车防撞预警系统设计倒车防撞预警系统是一种广泛应用于汽车上的辅助设备,可以帮助驾驶员在倒车过程中避免与障碍物发生碰撞。
本文将介绍一个基于单片机的倒车防撞预警系统的设计。
一、系统设计方案1.硬件设计部分:(1)超声波传感器:用于检测倒车车辆后方距离的变化,一般使用多个超声波传感器进行检测。
(2) 单片机(如Arduino):用于接收超声波传感器的信号并进行处理,同时控制显示器和蜂鸣器发出预警信号。
(3)显示器:用于显示倒车车辆后方的障碍物距离,可以使用LCD显示屏。
(4)蜂鸣器:用于发出声音预警信号,提醒驾驶员注意。
2.软件设计部分:(1)超声波传感器信号处理:单片机接收超声波传感器的信号,并进行滤波和幅值处理,得到障碍物距离值。
(2)倒车距离显示:将障碍物距离值显示在LCD屏幕上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(3)声音预警:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
二、系统实现步骤1.硬件实现:(1)连接超声波传感器:按照超声波传感器的规格书连接传感器与单片机。
(2)连接LCD显示屏:将LCD显示屏连接到单片机。
(3)连接蜂鸣器:将蜂鸣器连接到单片机。
2.软件实现:(1)单片机初始化:初始化单片机,设置IO口的输入输出模式和引脚功能。
(2)读取超声波传感器信号:通过IO口读取超声波传感器的信号,并进行幅值处理,得到障碍物距离值。
(3)显示距离信息:将障碍物距离值显示在LCD显示屏上,可以设计多级警戒区,显示不同距离范围内的预警信息。
(4)发出声音预警信号:当距离过近时,单片机控制蜂鸣器发出声音预警信号,提醒驾驶员注意。
三、系统测试和优化1.测试:将倒车防撞预警系统连接到倒车车辆上,进行实际测试。
测试过程中要注意校准超声波传感器和LCD显示屏的正确读数,以及蜂鸣器声音的预警效果。
2.优化:根据实际测试结果优化系统设计,可考虑加入其他传感器,如摄像头等,提高系统的准确性和可靠性。
外文翻译基于单片机的汽车倒车防撞语音提示系统
外文资料:Based on nRF24E1 and TMC2023 automobilecollision avoidance system development andrealizationCar engineering department of institute of technology of MunichBy LORENZ FERDIDADProgress of society with the development of times, more and more cars have entered ordinary people's family. Though the highway terms is being updated, yet avoid the crowded current situation of getting on the car of unavoidable highway, in addition, the speed is improved gradually, the malignant traffic accident is happening all the time, have brought the enormous life and property loss to people and the society. Car anticollision system whether one can send out seeing and hearing survey device of warning signal in advance to driver. It install, at car, can survey, attempt pedestrian, vehicle or barrier around close the automobile body usually; Can send out and collide the dangerous signal soon to driver and passenger ahead of time, impel driver bypass driver take emergency measure punish special dangerous situation even, avoid losses. At present, though various countries study, prevent system of colliding from (usually call the initiative security system in the world), but how could solve the timid and alert problem better, perplexing relevant workers all the time. The researcher in the world studies through a large number of experiments, has already reached common understanding, if want to solve problem described above effectively, the anticollision system must have the following functions:1)Must be capable of examining the angle, the azimuthal information ofthe goal is essential for removing emptily and alertly(2)Apt to produce anti-interference performance strong complicated transmission signal, cooperate with real-time high-efficient signal deal with with goal measuring algorithms, in order to remove emptily and alertly.Only the above two points combine together and guarantee the systematic dependability that the car defends colliding closely.1 TMC2023 chip and the nRF24E1 chip characteristic introduced TMC2032 is one kind of new entire digital correlation instrument electric circuit, its correlation word length and the related threshold are programmable. This chip is the monolithic 64 CMOS entire numeral correlation instrument large scale integrated circuit which American TRW Corporation recent years promoted, its interior had three independent clocks 8 displacements positions registers (stochastic data register A, local code register B and shield code register M); Moreover also has 7 registers to use for to load pre-placed limit. 0 ~ 64 between wilfully long stochastic data and the local code after the correlation operation, by the three samit the cushion 7 BCD code output, and limit compare with the initialization in the comparator, if the correlative value is bigger than or is equal to limit, then the flag bit by lowly changes high. Because has used the advanced high speed CMOS production craft, the parallel correlation speed reaches as high as above 30MHz. But widely applies to synchronization, the matched filtering, harms in the code examination, the recording and the bar code recognition, especially suits to the radar signal recognition. NRF24E1 is one kind of operating frequency may achieve 2.4GHz the wireless radio frequency receiving and dispatching chip, the channel operation time is smaller than 200 mu s, the data rate is 1Mbps outside, does not need to meet the SAW filter, is global general low cost radio frequency system level chip which the present world promotes for the first time.The interior inlays has with 8,051 compatible microprocessors and 10 9 inputs A/D switches, may between under the 1.9V ~ 3.6V voltage the steady work; The interior also inlays have impress the adjuster and the VDD voltage monitoring device. Wireless receiving and dispatching partially has with the nRF2401 similar function, this function starts by the internal parallel mouth and internal SPI, each due-out signal says regarding the processor all may take severs carries on the programming, or gives the microprocessor through the GPIO port biography. Chip nRF24E1 may realize the wireless communication in world public frequency band scope 2.4 ~ 2.5GHz. Receives and dispatches the partial packages to include the frequency divider, the amplifier, the regulator and two receiving and dispatching units. The output energy, the frequency band and other radio frequency parameter passable radio frequency registers conveniently have programmed the adjustment. Under the transmission pattern, the current consumption only has 10.5mA; Under the receive pattern, the current consumption only has 18mA, therefore the power loss is quite low.2 systems structures entire wrap information gathering system is composed by five sets of radio frequencies launches and the receiving device, each set of launches and the receive partial basic electric circuits all are same, these five sets of transmitter-receiver set also is connected with the DSP central processor, the central processor is responsible for the data which calculates them to pass on, makes the decision-making according to the actual situation. Each set of launches and receiving device structure like chart 1 shows. First by as the core radio frequency transmission circuit produces the high frequency electromagnetic wave take nRF24E1, then the modulation signal which sends by correlation operation chip TMC2032 to it carries on the modulation,thus produces with other radio frequency receiving and dispatching unit different radio-frequency signals, prepares for full for the receive. In order to enable the electromagnetic wave signal to have the enough far propagation distance, but also needs to modulate after the signal to carry on the enlargement, completes this function the electric circuit is the merit puts the electric circuit. Finally passes on airborne to a such signal. When sends out the electromagnetic wave meets when the obstacle returns, first must after correlation operation chip TMC2032 to it carry on the recognition, if the same group launches partially sends receives, and further bequeaths this signal the radio frequency receive part; Otherwise refuses to receive. Then the receive partially produces according to the electromagnetic wave in the airborne dissemination The phase moved calculates the time which its dissemination consumes, again calculates the obstacle and this group of receiving and dispatching partial distances. Finally gives this distance information the central processor. Central processing monolithic confidential at the same time the distance information which passes on to five groups of radio frequencies receiving and dispatching unit makes the computation, obtains obstacle and vehicle spatial position which measured. Reaches this point, the obstacle information gathering work basically completes, is left over is bequeaths again this comprehensive information the higher paraffin central processor, lets it make the final decision-making。
超声波测距的语音提示倒车报警系统设计
本科毕业设计(论文)( 2011届 )题目:超声波测距的语音提示倒车报警系统的设计学院:行知学院专业:电子信息工程学生姓名:王建波学号: ******** 指导教师:马世平职称:教授合作导师:职称:完成时间:20 11 年 4 月 10 日成绩:浙江师范大学本科毕业设计(论文)正文目录摘要 (1)Abstract (1)1 引言 (2)1.1 超声波测距国内外研究现状、发展动态 (2)1.2 超声波检测发展综述 (3)2 超声波测距的相关技术介绍和分析 (6)2.1 超声波测距的原理 (6)2.2 超声波测距的精度分析 (7)2.2.1 温度对声速的影响 (7)2.2.2 回波检测对时间的影响 (7)2.2.3发射和反射之间夹角对测距的影响 (7)3系统硬件的介绍 (7)3.1 单片机的介绍 (7)3.2 LCD1602液晶 (8)3.2.1 LCD1602主要技术参数: (8)3.2.2 LCD1602引脚功能 (9)3.3 74LS04芯片的介绍 (9)3.4 CX20106的介绍 (10)3.5 ISD4004语音芯片的介绍 (11)4系统硬件电路的设计 (12)4.1 总体方案设计 (12)4.2 模块论证方案 (13)4.2.1发射、接收模块 (13)4.2.2 显示模块 (13)4.2.3 语音模块 (13)4.3 硬件电路设计 (14)4.3.1 发射电路 (14)4.3.2 接受电路 (14)4.3.3语音播报电路 (14)4.3.4 复位电路 (15)4.3.5 时钟电路 (15)4.3.6 降压电路 (16)5系统软件设计 (16)5.1 超声波测距的算法 (16)5.2 主程序与流程图 (17)5.3超声波发射子程序 (18)5.4超声波接收中断程序 (18)5.5语音播报子程序 (19)6结束语 (20)参考文献 (21)附录一(电路原理图) (21)附录二(电路PCB图) (22)附录三(实物图) (22)附录四(程序) (23)超声波测距的语音提示倒车报警系统设计超声波测距的语音提示倒车报警系统设计数理与信息工程学院电子信息工程专业王建波(07226140)指导老师:马世平(教授)摘要:随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。
汽车倒车影像及语音报警系统的设计
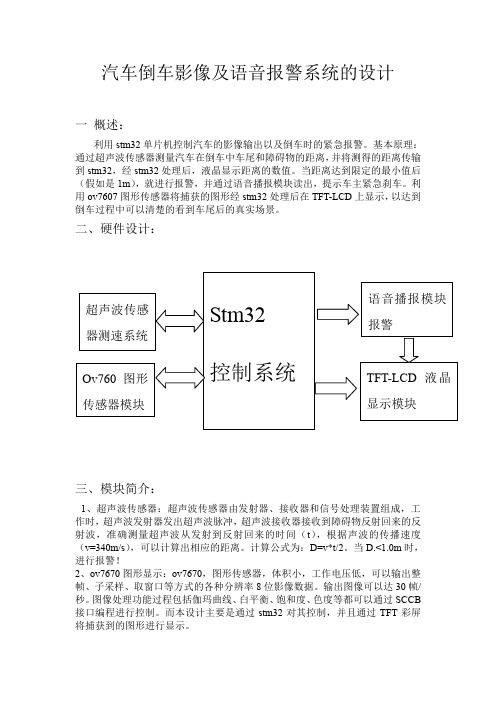
汽车倒车影像及语音报警系统的设计一 概述:利用stm32单片机控制汽车的影像输出以及倒车时的紧急报警。
基本原理:通过超声波传感器测量汽车在倒车中车尾和障碍物的距离,并将测得的距离传输到stm32,经stm32处理后,液晶显示距离的数值。
当距离达到限定的最小值后(假如是1m ),就进行报警,并通过语音播报模块读出,提示车主紧急刹车。
利用ov7607图形传感器将捕获的图形经stm32处理后在TFT-LCD 上显示,以达到倒车过程中可以清楚的看到车尾后的真实场景。
二、硬件设计:三、模块简介:1、超声波传感器:超声波传感器由发射器、接收器和信号处理装置组成,工作时,超声波发射器发出超声波脉冲,超声波接收器接收到障碍物反射回来的反射波,准确测量超声波从发射到反射回来的时间(t ),根据声波的传播速度(v=340m/s ),可以计算出相应的距离。
计算公式为:D=v*t/2。
当D.<1.0m 时,进行报警!2、ov7670图形显示:ov7670,图形传感器,体积小,工作电压低,可以输出整帧、子采样、取窗口等方式的各种分辨率8位影像数据。
输出图像可以达30帧/秒。
图像处理功能过程包括伽玛曲线、白平衡、饱和度、色度等都可以通过SCCB 接口编程进行控制。
而本设计主要是通过stm32对其控制,并且通过TFT 彩屏将捕获到的图形进行显示。
Stm32 控制系统 超声波传感器测速系统 语音播报模块报警 Ov760图形传感器模块 TFT-LCD 液晶显示模块3、TFT-LCD液晶显示:即薄膜晶体管型液晶显示屏,它属于有源矩阵液晶屏,TFT液晶为每个像素都设有一个半导体开关,每个像素都可以通过点脉冲直接控制,因而每个节点都相对独立,并可以连续控制,不仅提高了显示屏的反应速度,同时可以精确控制显示色阶,TFT的亮度好,对比度高,层次感强,颜色鲜艳,经Stm32控制后,图形可以有个较好的的显示输出!4、Stm32控制系统:有Stm32F103系列开发板组成,属于ARM32位Cortex-M3 内核,最高工作频率72MHz,片上集成512KB的Flash存储器。
具有声光提示双功能的倒车防撞系统设计
机可计算 出发射超声波的时刻与接 收到反射 回波信号 的时
刻之间 的时间差 t 。超声 波是 一种 声 波 , 速 C与温度 有 声 关, 传感器 与障碍物之间距离 D的计算公式 为
D =c 2=( 3 . t / 3 1 5+0 6 7 )/ . . 0 0 t2
De i n o u o o i e r v r i o l i n a o da c sg fa t m tv e e sng c li o v i n e s s se t ud bl n ii l u lf c i n y t m wih a i e a d v sb e d ar n coyt eh o g s Tasue adMi ss m T cnl i ) r e oe
21 0 1年 第 3 O卷 第 5期
具 有声 光提 示双 功 能 的倒 车 防撞 系统 设 计
周 超
( 国 民用 航 空飞 行 学 院 航 空 工 程 学 院 。 川 广 汉 6 80 ) 中 四 13 7
波脉 冲遇到障碍物时就会 发生反射 , 回波又作用于 传感 该 器, 其机械振动又转变成 电信号 ( 称之为接 收波 ) 。微计 算
业驾驶员和女性更 为突 出。据有关 调查 统计 ,5 的汽 车 1%
碰撞 事故 是 由 于倒 车时 汽 车 的后视 能 力不 良造 成 的 。 因此 , 增加汽车的后视能力 , 研制汽车后部探测 障碍物 的倒 车雷达成 为近些年来的研究热点之一。超声波测距在使用
Z 0U a H Ch o
( it nE g er gIsi t, i l i t nFih nvri f hn , a g aI 1 37 C ia Av i n i ei ntue Cv ai l t i s yo ia Gu n h I6 80 , hn ) ao n n t i Av o g U e t C
基于单片机的汽车倒车防撞系统设计

基于单片机的汽车倒车防撞系统设计汽车倒车防撞系统是现代汽车的重要安全装置之一,其主要功能是帮助驾驶员避免在倒车时发生撞击和碰撞事故。
本文将介绍一个基于单片机的汽车倒车防撞系统设计。
1.系统概述汽车倒车防撞系统由超声波传感器模块、单片机控制模块和蜂鸣器模块组成。
超声波传感器模块用于测量周围的障碍物距离,单片机控制模块负责接收传感器数据并进行处理,最后根据测量结果控制蜂鸣器发出声音警示驾驶员。
2.硬件设计系统采用了传感器模块和单片机模块进行设计。
超声波传感器模块采用了多个超声波传感器,可以实现多个方向同时进行距离测量。
单片机模块采用了一颗高性能的单片机芯片,具备快速处理能力和丰富的接口。
3.软件设计软件设计主要包括以下几个方面:3.1超声波传感器数据采集:通过对超声波传感器发送脉冲信号并接收回波信号,可以计算出测得的距离值。
3.2数据处理和判断:将采集到的距离值与事先设定的安全距离进行比较,当距离小于设定值时,证明有障碍物靠近,需要发出警示信号。
3.3警示信号发出:当检测到障碍物靠近时,单片机控制蜂鸣器发出声音警示驾驶员。
可以通过改变声音的频率和持续时间来表达不同的警示级别。
4.系统测试和优化设计完成后,需要对系统进行测试,并根据测试结果进行优化。
4.1传感器精度和稳定性:测试传感器的测距精度和稳定性,确保传感器测量结果准确可靠。
4.2系统响应时间:测试系统的响应时间,确保系统能够及时发出警示信号。
4.3警示效果:通过模拟实际倒车场景,测试系统的警示效果,确保驾驶员能够准确理解警示信号。
5.总结和展望基于单片机的汽车倒车防撞系统设计可以有效地帮助驾驶员避免倒车事故的发生。
然而,目前的设计还有一些问题需要进一步解决,如系统的稳定性和可靠性需要不断优化,同时还可以考虑引入图像处理技术来提升系统的性能。
总之,基于单片机的汽车倒车防撞系统设计有着广阔的应用前景和发展空间。
单片机倒车防撞语音播报系统
随着 社会 的发展 ,汽 车的数量 也在大 幅攀 升。汽车在 倒 车时 屡屡 发生 碰撞事 件 ,造 成 了人身 伤亡 和经 济损 失。 针对 这种情 况 ,本文设计 了单 片机倒车 防撞 语音播 报系统 以单 片机STC89C52为核 心 ,通过超声 波测距模 块 ,在整个 倒 车过程 中 自动测量 出车尾 到最近障 碍物 的距 离 ,然后通 过语 音模块播 报并在 液晶显示 屏显示距 离 ,提醒驾 驶员 注 意刹车 。
的组建便成为学 生们应该 掌握的基本技能 。通过这个功能 , 学生们 能够掌握 组 网的基本知识 、网络 的配 置和路 由器的 设置等。
(四 )综合服务模块 这个模块包含了 “信息推送… ‘互动交流”和 “线上讨论” 等功能,学生在利用APP平台学 习的同时,能够及时与教师进 行 交 流互 动 ,在 课 外学 习 的时候 也 能得 到教 师 的指 导 。
(二 )1602LCD液 晶显示程序主要完成显示模式初始化 , 模式 设置 ,关 闭显示 ,屏 幕清屏 ,显示开启 及设置 光标起 始位置 ,写地址 ,写数据 ,直到数据全部写完等工作 。
(三 )温度传感器程序 主要完 成对温度 的读取 ,以便超 声波模块计算距离时进行温度补偿 ,提高测距的精度。
【参考文献 】 【1]元红妍.电子综合设计 实验教程 fM】.济 南:山东大学
出版 社 .2005.
[2]雷思孝 ,李伯 成 ,雷向莉.单片机原理 及 实用技 术 『M1.西安:西安 电子科技 大学 出版社 ,2004.
[3]张齐 ,杜群贵 .单 片机应 用 系统设计技 术——基 于 C语 言 编 程 『M1.北 京 :北京 电子 工 业 出版社 ,2004.
基于1760语音模块的汽车倒车防撞语音提示系统设计

基于1760语音模块的汽车倒车防撞语音提示系统设计
苏巧平;刘原;纪利琴
【期刊名称】《宝鸡文理学院学报(自然科学版)》
【年(卷),期】2013(33)2
【摘要】目的设计一种汽车倒车防撞系统,可实时显示汽车与目标障碍物的距离,并可进行语音提示.方法系统以AT89S52单片机为主控芯片,由键盘设置安全距离,利用超声波传感器探测目标障碍物信息,由18b20进行温度检测,经温度补偿后确定与目标障碍物距离,实时显示距离,并由1760语音模块提示测量距离与安全距离的关系,提醒使用者注意调整距离.结果给出了系统的详细硬件设计方案及主要软件流程图,采用温度补偿,在倒车系统中满足精度要求.结论本系统结构简单,价格低廉,具有智能语音播报功能和距离显示功能,可用于机动车倒车等领域.
【总页数】4页(P49-52)
【作者】苏巧平;刘原;纪利琴
【作者单位】安徽新华学院电子通信工程学院,安徽合肥230088;安徽医学高等专科学校医疗器械系,安徽合肥230000;安徽新华学院电子通信工程学院,安徽合肥230088
【正文语种】中文
【中图分类】TP277
【相关文献】
1.基于单片机的汽车倒车防撞报警系统设计 [J], 仇成群;胡天云
2.基于AT89C51单片机的汽车倒车智能防撞系统设计 [J], 韩利凯;韩旭
3.基于单片机的红外汽车倒车防撞系统设计 [J], 曹马健;黄任皇;白祖仕;桂玲
4.基于单片机的超声波测距汽车倒车防撞系统设计 [J], 李杰
5.基于超声波测距的汽车倒车防撞报警系统设计 [J], 王虎;杨启正;李约朋
因版权原因,仅展示原文概要,查看原文内容请购买。
具有声光提示双功能的倒车防撞系统设计
具有声光提示双功能的倒车防撞系统设计周超【期刊名称】《传感器与微系统》【年(卷),期】2011(030)005【摘要】An automotive reversing collision avoidance system is designed based on MCU SPCE061A. Three ultrasonic ranging units selecting short distance pattern and LED module. It can detect obstacles between 20 cm 100cm,and audio broadcast its direction and distance to car. The less distance ,the more frequency of LED blink.Experimental results show that the system has high reliability, fast response and convenience of use, which can meet the requirements of parking.%设计了一种基于SPCE061A的倒车防撞系统.以SPCE061A单片机为核心,外接3个超声波测距模组,选用其短距测距模式,能探测20-100cm范围内的障碍物.结合SPCE061A的语音功能,通过语音播报障碍物的方位及其到车体的距离,且有对应的LED闪烁提示,障碍物距离车体越近LED闪烁频率越高.实践表明:该系统可靠性高,响应速度快,使用方便,能够满足正常的泊车要求.【总页数】4页(P110-112,115)【作者】周超【作者单位】中国民用航空飞行学院,航空工程学院,四川,广汉,618307【正文语种】中文【中图分类】TP212【相关文献】1.具有语音提示功能的超声波倒车雷达系统的设计 [J], 张欣;冯雷;姜长坤2.基于1760语音模块的汽车倒车防撞语音提示系统设计 [J], 苏巧平;刘原;纪利琴3.基于单片机的倒车防撞预警系统设计和实现分析 [J], 袁秀珍4.基于单片机的超声波测距汽车倒车防撞系统设计 [J], 李杰5.智能型机动车倒车防撞语音提示器的设计 [J], 王松德;宋全有;王灵芝因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
.0
.1
40
1
PU2
岛C13
lOUF/
VI 一 2..C
k.e,兰筹;;
6V ISD MISO ISD MOSI ISD SCLK SS 5 6 7 8 9
P P P P P
.2 .3 .4 .5 .7
39一P00 38 POl
j,
36
j,
P03
PU4
VCC ‘R6 lOK
ISD mcu
rest
P .6
can
meet the accuracy
requirements.Conclusion--The
can
system boasts simple structure,low cost,dis—
tance
display and voice prompt,SO it
be used in the field of automobile back—draft anticollision.
格的形式储存于单片机中,根据实际温度查表即可
员可根据实际路况和车位空间,通过按键实现安全 距离的设置,2个按键的功能分别为加1键和确认
键,分别由单片机P1.2、P1.3引脚检测。 显示模块采用3个七段数码管实时显示汽车与
万方数据
52
宝鸡文理学院学报(自然科学版)
2013正
得到当前声速。系统选用单线数字温度传感器芯片
万方数据
50
宝鸡文理学院学报(自然科学版)
2013正
要灵活设置安全距离,并可语音提醒使用者注意安 全。本系统设计简单,成本低,使用方便,可有效地 避开可能对倒车造成危害的障碍物和行人,从而有 效避免由于倒车造成的汽车碰撞或擦伤而引发的经 济损失和人身安全问题,具有较强的实用性[11]。 1硬件系统设计
Key words:ultrasonic detection distance;voice module;temperature compensation
随着我国经济的不断持续发展,人们的生活水 平日益提高,在一些大中型城市,汽车已经成为人们
日常出行的最重要的交通工具。汽车数量迅猛增长
路狭窄,车流量和人流量非常大,交通非常拥堵,在 这样的情况下安全停车是非常困难的。面对如此窘
单片机处理,而且采用单总线方式与单片机相连,占
DSl8820作为温度传感器,该传感器与传统的热敏 电阻不同,可直接将被测温度转化成数字信号,以供
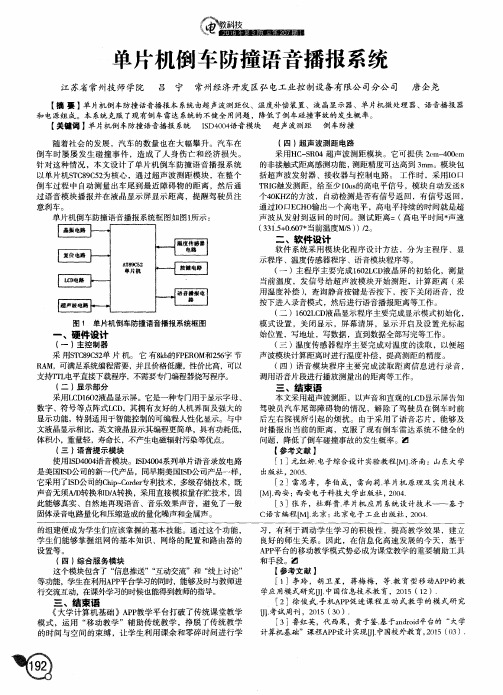
用单片机I/O资源少。超声波声速与温度的关系如 表2所示。上述3个模块与单片机接口电路见图3。
表2超声波波速与温度的关系
温度/℃ 声速/m・s_1
一30一20—lO
to
to
prompt the rela—
to
alert the
user
adj ust
are
the dis—
tance.R姻ultS—The
detailed design scheme of hardware and the flowcharts of software
presented.
The technology of temperature compensator which is used in the automotive collision avoidance system
表1 录音时间、采样频率、振荡电阻关系
1 2 60 8
80 3 75 6.4 100 4 90 5.3 5
系统总体设计 系统的总体框图如图1所示,主要包括单片机、
按键模块、温度模块、超声波模块、倒车档信号、显示 模块、语音模块和报警模块等。
==爿墨量堡苎
叵亟蛩j
l超声波模块}—冷
垫 片 机
=纠i丽
刮报警模块
n ^.o J,VrJJ
34 33 32
P05 P06 P07
『3 l —
:。.印上
II:一X111830p
II
。豢
P34 P35 P36 P37 14 15 16 17 19 X2
P3.O/RxD P3.1/TxD P3.2/INTO P3.3/INTl P3.4/T0 P3.5/Tl
EA/Vpp
21 P20
i悍l上20 Hr。害
Dpy Ycllow—CA
图3系统原理图
1.4
其他部分设计
系统设置有2个按键,在进入倒车模式后,驾驶
障碍物的距离,显示精确到1 cm。
由单片机的Po口与数码管的八段相接,P2.0、 P2.1、P2.2实现3个数码管的片选,实现3个数字 的动态显示。考虑温度的影响,为提高距离的测量 精度,采取温度补偿方式,将温度与声速的关系以表
境,汽车倒车防撞系统应运而生。
的同时,道路交通设施由于建设周期等原因,并不能
迅速满足要求,许多城市老城区通常又是市中心,道
本文设计的汽车防撞系统以超声波传感器感知 汽车与障碍物的距离,用户可通过按键根据实际需
*收稿日期:2013-04—27,网络出版时间:2013—05—18
19:48.
作者简介:苏巧平(1980一),女,山东莱阳人,讲师,硕士。研究方向:自动控制.Email:39384253@qq.COWl
由单片机P1.0引脚与模块TRIG引脚相连,P1.1 引脚与模块ECH0引脚相连。由单片机给TRIG
平持续时间t即为超声波从发射到接收的时间。假
设超声波声速为勘,测量距离为S,则S一谯/2。也可
以利用超声波发射与接收到回波的时间差作为时间
引脚至少10“s的触发信号,则模块可自动发送8个
40
代替上述时间t,计算公式相同,同样可以进行距离 的计算。本设计采用第二种方式。超声波测距模块
录音时间/s 采样率/kHz 振荡电阻/kn
40
120
4
12
60
l倒车档信号目
120
160
语音模块电路如图2所示。在系统设计时,为 保证使用的方便性,设计外部独立按键,通过对外部 独立按键的控制,可不经过单片机而直接实现语音 模块语音录制、播放、擦除等功能。同时,其MISO 引脚、MOSI引脚、SCLK引脚、SS引脚分别与单片 机的P1.4~P1.7相接,组成SPI总线,实现单片机 命令控制字的传输。2种方式一方面可以保证录
基于1760语音模块的汽车倒车防撞语音提示系统设计。
苏巧平1,刘
原2,纪利琴1
(1.安徽新华学院电子通信工程学院,安徽合肥230088;2.安徽医学高等专科学校医疗器械系,安徽合肥230000)
摘要:目的设计一种汽车倒车防撞系统,可实时显示汽车与目标障碍物的距离,并可进行语音 提示。方法 系统以AT89S52单片机为主控芯片,由键盘设置安全距离,利用超声波传感器探测目标 障碍物信息,由18820进行温度检测,经温度补偿后确定与目标障碍物距离,实时显示距离,并由1760 语音模块提示测量距离与安全距离的关系,提醒使用者注意调整距离。结果 给出了系统的详细硬件 本系统结构简单,价
与单片机的接口如图3所示。
PRl8木4.7K
kHz的方波,并自动检测是否有回波信号,若有
回波信号,则在ECHO引脚输出一个高电平,高电
Icl VCC echo
trl窖 1
V—CC
VCC P0.O P0.1 P0.2 P0.3 P0.4 PO.5 P0.6
fU・/
l 2 3 4 5 6 7 8 1
2
P
Abstract:0bjective--To
distance between the
car
design
an
automotive collision avoidance system which
can
display the the
and the target obstacle and make voice prompts in real
宝鸡文理学院学报(自然科学版),第33卷,第2期,第49—52页,2013年6月
Journal of Baoji University of Arts and Sciences(Natural Science),V01.33,No.2,pp,49—52,Jun.2013 DOI:CNKI:61—1290/N.20130518.1948.001 http://www.cnki.net/kcms/detail/61.1290.N.20130518.1948.001.html
设计方案及主要软件流程图,采用温度补偿,在倒车系统中满足精度要求。结论 格低廉,具有智能语音播报功能和距离显示功能,可用于机动车倒车等领域。 关键词:超声波测距;语音模块;温度补偿 中图分类号:TP277 文献标志码:A
文章编号:1007—1261(2013)02—0049—04
Design of automobile back_-draft anticollision system
perature detection module of the chip 1 8820,the distance from the target obstacle is determined and
displayed with 1 8820 Circuit in real time.The 1 7 60 voice module circuit is used tionship between the measured distance and the safety distance and
音、擦除的方便性,又有单片机保证录音播报的灵活 性。芯片的SP+和SP一直接接扬声器,实现语音发 声。
图1系统总体框图
系统选用AT89S52单片机为主控芯片,在输入 通道上主要完成倒车档信号的检测、输出控制信号 控制超声波模块发射超声波信号、超声波回波信号 的检测、进行温度数字量的读取及按键信号的采集 和处理等;在输出通道上主要完成距离的动态输出