编码器+高速计数器
高速计数器测速

这里每转脉冲数是已知的。高速计数器也是可以计数的,
怎么得到单位时间的脉冲数??
答:用定时中断程序读取高速计数器的数值,得到的就是单位时间的脉冲数。
每次读数完毕,记住将高速计数器清零,再重新启动定时器和计数器。
西门子 PLC S7-200连接编码器,测机器的比较实时的速度,怎么实现?
答:用定时中断测前一次计数和本次计数差值,乘以定时中断的频率,再除以编码器分辨率就是转速了。
假如本次中断计数器计数值是vd4,上次计数值是vd0
,定时中断时间为0.1秒,编码器分辨率是2000p/r
那么转速就是(vd4-vd0)/10/2000
编码器(高速计数器)的使用方法

配件供应
提供编码器原装配件供应,确保维修 质量和设备性能。
06 编码器(高速计数 器)市场发展趋势 与前景展望
市场需求分析
工业自动化需求
编码器作为工业自动化控制系统中的关键部件,其市场需求随着工 业自动化程度的提高而不断增长。
智能制造推动
智能制造的发展对编码器的精度、速度和稳定性提出了更高要求, 推动了编码器市场的进一步发展。
在物流仓储领域,对于物 品计数和传输控制,可选 用具有较高响应频率和稳 定性的增量式编码器。
常见问题解答与误区提示
常见问题
编码器无法正常工作、输出信号不稳定、计数不准确等。
解答与误区提示
检查编码器选型是否正确、参数设置是否合理、接线是否牢固可靠;避免将不同类 型的编码器混淆使用,注意区分分辨率和精度的概念。
调整分辨率
根据实际需求调整编码器的分辨 率,以平衡计数精度和响应速度 之间的关系。
软件优化
通过优化控制算法、提高数据处 理速度等措施,进一步提高整个
系统的性能和稳定性。
安全操作规范提示
电气安全
在接线和调试过程中,务必切断电 源并确保所有电气连接安全可靠, 以防止触电和短路等危险情况发生。
操作规范
在安装和使用编码器时,注意避免 机械碰撞和振动对编码器造成的损 坏,同时确保编码器固定牢固可靠。
03 高速计数器接线 与调试技巧
接线方式及注意事项
接线方式
电缆选择
编码器一般采用差分信号输出,需要将其与 控制器或计数器的差分信号输入端口相连, 注意正负极性的对应。
选择屏蔽双绞线或同轴电缆等高质量电缆, 以减少信号干扰和衰减。
接线长度
接地处理
尽量缩短编码器与控制器或计数器之间的接 线长度,以降低信号衰减和干扰的风险。
一种高速计数器计数失效故障的解决方法

一种高速计数器计数失效故障的解决方法文章以西门子S7200 PLC为例,讲述了在应用高速计数器对旋转编码器脉冲进行计数时,出现的故障及其排除方法。
标签:旋转编码器;高速计数;故障引言旋转编码器安装于电机减速机旋转轴上,PLC对旋转编码器发出的脉冲进行计数,可以实现定位、定长距离运行功能。
1 应用情形在一个应用中,链条的两端连着夹盘和配重,升降电机通过链条带动夹盘上升和下降。
升降电机正转,夹盘上升;升降电机反转,夹盘下降。
升降电机带抱闸。
夹盘可停止在行程内的任一高度,完成各层产品的码垛。
升降电机减速机的轴上安装一个旋转编码器,PLC通过高速计数器对旋转编码器发出的脉冲进行计数,自动计算夹盘的当前高度。
操作台上有急停、暂停按钮。
(1)急停按钮(一个NC急停按钮):按下急停按钮后直接使变频器断电、接触器线圈失电、PLC 失电。
(2)暂停按钮(一个NC急停按钮):按下暂停按钮后,PLC不失电,程序使所有的输出复位,所有设备停止动作,恢复按钮后,设备接着暂停时的状态继续运行。
2 硬件选型PLC:西门子CPU 226 CN、触摸屏:步科MT4414T、旋转编码器:欧姆龙E6B2-CWZ5B 1000P 2M、分辨率:1000、输出相:A、B、Z相、输出相位差:A相、B相的位相差90±45℃(1/4±1/8T)、输出方式:PNP集电极开路输出、最高响应频率:50kHz。
不选用单相编码器的原因:从升降电机的抱闸动作到机械抱死有一定的时间延迟,夹盘的重量加上夹盘里产品的重量,会导致夹盘往下遛。
停止升降电机反转输出后,夹盘还会冲下去一点,然后被抱闸抱死停住;停止升降电机正转输出后,夹盘由于惯性会再上冲一点然后由于重力作用再掉下来一点,然后被抱闸抱死停住。
因此,停止升降电机输出瞬间的高度并不是夹盘最后真实高度,这就需要PLC做额外处理。
使用单相的编码器来计算夹盘的当前高度不容易准确:停止升降电机正转输出后,不管夹盘由于惯性上冲还是因重力下遛,单相旋转编码器的脉冲数都是增加的,那么停止升降电机正转输出后到底下遛多少距离,PLC无法判定,这就会造成误差,升降动作有几个来回后,误差积累起来,就会使控制越来越不精准。
高速计数器控制指令

(2) 软件复位
一个扫描周期后高速计数器复位。 当25200 ON一个扫描周期后高速计数器复位。 一个扫描周期后高速计数器复位
25200 Ts 复位
另外, 断电再上电时高速计数器自动复位。 另外,当PLC断电再上电时高速计数器自动复位。 断电再上电时高速计数器自动复位
( 00:不使用;01:使用 :不使用; :使用)
例如: 例如:DM6642的内容为 # 0114 的内容为
使用高速 计数器 软件复位 递增计数
4. 高速计数器的溢出
当高速计数器计数时: 当高速计数器计数时: 若从上限值开始进行递增计数就会发生上溢出, 若从上限值开始进行递增计数就会发生上溢出,其当 递增计数就会发生上溢出 前值为0FFF FFFF; 前值为 ; 若从下限开始进行递减计数就会发生下溢出,其当前 若从下限开始进行递减计数就会发生下溢出, 递减计数就会发生下溢出 值为FFFF FFFF 。 值为 发生溢出时计数器停止计数。 发生溢出时计数器停止计数。 重新复位高速计数器时,将清除溢出状态。 重新复位高速计数器时,将清除溢出状态。
5.高速计数器的当前值存储区 .
系列PLC,高速计数器的当前值 对CPM1A系列 系列 , 存放在SR248和SR249中。 存放在 和 中 SR248存放低 位, SR249存放高 位。 存放低4位 存放高4位 存放低 存放高 在高速计数器执行高速计数操作后, 在高速计数器执行高速计数操作后,可以 利用指令从SR248和SR249中读出其当前值, 中读出其当前值, 利用指令从 和 中读出其当前值 也可以利用指令更改其当前值。 也可以利用指令更改其当前值。
旋转编码器
高频脉冲可来源于控制现场,也可由旋转编码器提供。 高频脉冲可来源于控制现场,也可由旋转编码器提供。 一种旋转编码器与PLC的连接示意图 的连接示意图 一种旋转编码器与
西门子1200系列PLC教程-高速计数器
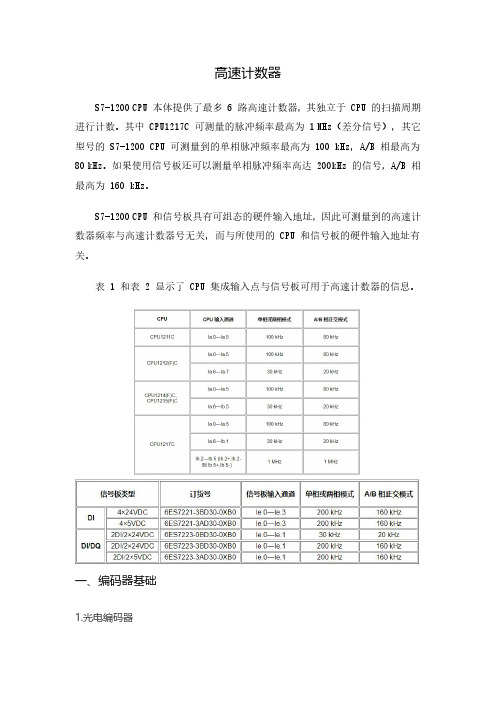
高速计数器S7-1200CPU本体提供了最多6路高速计数器,其独立于CPU的扫描周期进行计数。
其中CPU1217C可测量的脉冲频率最高为1MHz(差分信号),其它型号的S7-1200CPU可测量到的单相脉冲频率最高为100kHz,A/B相最高为80kHz。
如果使用信号板还可以测量单相脉冲频率高达200kHz的信号,A/B相最高为160kHz。
S7-1200CPU和信号板具有可组态的硬件输入地址,因此可测量到的高速计数器频率与高速计数器号无关,而与所使用的CPU和信号板的硬件输入地址有关。
表1和表2显示了CPU集成输入点与信号板可用于高速计数器的信息。
一、编码器基础1.光电编码器编码器是传感器的一种,主要用来检测机械运动的速度、位置、角度、距离和计数等,许多马达控制均需配备编码器以供马达控制器作为换相、速度及位置的检出等,应用范围相当广泛。
按照不同的分类方法,编码器可以分为以下几种类型:根据检测原理,可分为光学式、磁电式、感应式和电容式。
根据输出信号形式,可以分为模拟量编码器、数字量编码器。
根据编码器方式,分为增量式编码器、绝对式编码器和混合式编码器。
光电编码器是集光、机、电技术于一体的数字化传感器,主要利用光栅衍射的原理来实现位移—数字变换,通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器。
典型的光电编码器由码盘、检测光栅、光电转换电路(包括光源、光敏器件、信号转换电路)、机械部件等组成。
光电编码器具有结构简单、精度高、寿命长等优点,广泛应用于精密定位、速度、长度、加速度、振动等方面。
2.增量式编码器增量式编码器提供了一种对连续位移量离散化、增量化以及位移变化(速度)的传感方法。
增量式编码器的特点是每产生一个输出脉冲信号就对应于一个增量位移,它能够产生与位移增量等值的脉冲信号。
增量式编码器测量的是相对于某个基准点的相对位置增量,而不能够直接检测出绝对位置信息。
如图1-1所示,增量式编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成。
1200高速计数器和编码器编程实例
1200高速计数器和编码器编程实例计数器和编码器是数字电路中常用的组件,用于计算和编码数据。
在本文中,我们将介绍如何使用1200高速计数器和编码器进行编程实例。
首先,让我们了解一下1200高速计数器和编码器的基本原理。
1200高速计数器是一种用于计算脉冲信号的设备,它可以根据输入的脉冲信号进行计数,并将计数结果输出。
编码器是一种将输入的数据转换为特定编码形式的设备,它可以将输入的数据转换为二进制或其他编码形式。
在本例中,我们将使用1200高速计数器和编码器来计算一个旋转物体的转速,并将转速以二进制形式输出。
首先,我们需要连接1200高速计数器和编码器到我们的电路中。
将计数器的输入引脚连接到旋转物体的传感器上,以接收脉冲信号。
将编码器的输入引脚连接到计数器的输出引脚上,以接收计数结果。
将编码器的输出引脚连接到我们的显示设备上,以显示转速。
接下来,我们需要编写程序来控制1200高速计数器和编码器。
我们可以使用C语言或其他编程语言来实现这个程序。
首先,我们需要初始化计数器和编码器,并设置计数器的初始值为0。
然后,我们需要设置计数器的计数模式为自动计数,并设置计数器的计数速度为1200次/秒。
接下来,我们需要设置编码器的编码模式为二进制,并设置编码器的输出格式为二进制。
然后,我们需要编写一个循环来不断读取计数器的计数结果,并将结果转换为二进制形式。
我们可以使用位运算符来实现这个转换。
然后,我们将转换后的结果输出到显示设备上。
最后,我们需要添加一些延时来控制程序的运行速度。
我们可以使用延时函数或其他方法来实现延时。
通过以上步骤,我们可以实现一个简单的1200高速计数器和编码器的编程实例。
这个实例可以用于计算旋转物体的转速,并将转速以二进制形式输出。
总结起来,1200高速计数器和编码器是数字电路中常用的组件,用于计算和编码数据。
通过编写程序来控制这些组件,我们可以实现各种应用,如计算旋转物体的转速。
希望本文对您理解和应用1200高速计数器和编码器有所帮助。
S7-200系列PLC编程器的高速计数器使用示例

S7-200系列PLC编程器的使用示例Siemens编程器S7-200系列用在中小型设备上的自动系统的控制单元,适用于各行各业,各种场合中的检测,监测及控制。
在这里,和大家一起来讨论S7-200几个使用方面的情况。
1.步进,伺服脉冲定位控制。
在设备的控制系统中,有关运动控制是很重要的,下面我们来看一看西门子S7-200系列PLC怎样来实现这个功能。
首先,确定使用哪个端口来发脉冲,如采用Q0.0发脉冲,则它的控制字为SMB67,脉冲同期为SMW68,脉冲个数存放在SMD72中,下面是控制字节的说明:Q0.0 Q0.1 控制字节说明SM67.0 SM77.0 PTO/PWM更新周期值 0=不更新,1=更新周期值SM67.1 SM77.1 PWM更新脉冲宽度值 0=不更新,1=脉冲宽度值SM67.2 SM77.2 PTO更新脉冲数 0=不更新,1=更新脉冲数SM67.3 SM77.3 PTO/PWM时间基准选择 0=1微秒值,1=1毫秒值SM67.4 SM77.4 PWM更新方法 0=异步更新,1=同步更新SM67.5 SM77.5 PTO操作 0=单段操作,1=多段操作SM67.6 SM77.6 PTO/PWM模式选择 0=选择PTO,1=选择PWMSM67.7 SM77.7 PTO/PWM允许 0=禁止PTO/PWM,1=允许这样根据以上表格,我们得出Q0.0控制字:SMB67为:10000101采用PTO输出,微妙级周期,发脉冲的周期(也就是频率)与脉冲个数都要重新输入。
10000101转化为16进制为85,有了控制字以后,我们来写这一段程序:根据上面这段程序,我们知道了控制字的使用,同时也知道步进电机的脉冲周期与冲个数的存放位置(对Q0.0来说是SMW68与SMD72)。
当然,VW100与VD102内的数据不同的话,步进电机的转速和转动圈数就不一样。
还有一点需要说明得是:M0.0导通---PLC捕捉到上升沿发动脉冲输出后,想停止的话,只须改变端口脉冲的控制字,再启动PLS即可,程序如下:2.高速计数功能。
三菱plc高速计数器和编码器应用

三菱plc高速计数器和编码器应用编码器的作用相信大家会经常听到,但是,到底怎么用,相信很多人是一知半解,那么,今天陈老师就给大家分享一下具体的使用方法。
使用编码器之前,我们需要先学习高速计数器的概念。
一、什么时高速计数器假如我们的plc的X0点接入了一个按钮,在plc里面写入以下的程序,我们按住按钮1次,那么计数器就会记1,按2次就记2,… …我们按1000次了,计数器c0的常开触点就会闭合,这很好理解。
假如我1秒按一次,那么,人为去按,那么按个1000次就能导通。
重点来了,如果说我不接按钮,我接了个光电感应器或者编码器去感应,由机器去触发,机器运行的速度非常快,可能1秒按了几百次,甚至几百几千次,我们的X0的常开触点就感应不了了,那么怎么办,我们可以用高速计数器。
如下表,是我们的单相的高速计数器假如我把光电感应器接到,X0,那么C235,就是它的专用的计数器,X0每感应到的每一个信号都会用C235进行计数,我们用以下程序就能把X0感应到的脉冲数存放到D235里面。
(同理,C236记录的是X1的脉冲数;C237记录的是X2的脉冲数… …)当然计数器的计数频率是有个极限的,普通的FX系列的X点,接受的速度是50KHz,就是1秒钟能接收导通50 000次。
接下来,看看编码器是怎么使用的。
二、编码器的使用(相对值编码器)右图是一个编码器,转动上面的轴可以发出2个信号,每转动一定的角度,这2个输出都会闭合一定的次数,就像上面的光电感应器的接线一样,接线可以接到2个X点上面去。
然后我们可以通过高速计数器来对它进行计数,从而知道它转动了多少距离。
它与前面那种一个点输入的感应器又不一样,编码器正转计数会增加,反转计数应该减少。
作用的话定位才能准确。
这时我们需要用到下面另外一种高速计数器如下图:我们可以选用C251到C255这几个计数器,假如我的编码器接的是X0和X1(接线后面再讲),那么选用的就是C251,我们来写一段程序看看:这样,我们就把编码器记录的位置记录在D0、D1两个寄存器里面了。
PLC高速计数器功能及应用
1、高速计数器的数量及编号
高速计数器在程序中使用时的地址编号用HSCn来表示, HSC表编程元件名称为高速计数器,n(n=0~5)为编号。
每个高速计数器的计数结果都对应有一个当前值寄存器。 编程时可通过地址HCx(x=0~5)来读取高速计数器的当前值。
不同型号的PLC主机,高速计数器的数量对应如下表所示。
4)在第4页设置当前值等于预置值时产生中 断(中断事件编号为12),使用默认的中断程序 符号名COUNT_EQ。
向导允许高速计数器按多个步骤进行计数, 即在中断程序中修改某些参数,例如修改计数器的 计数方向、当前值和预置值,并将另一个中断程序 连接至相同的中断事件。
本例设置编程2步,在中断程序COUNT_EQ中,
A相 B相
a)正转
A相 B相
b)反转
③ 三通道增量式编码器
编码器内部除了有双通道增量式编码器的两对光 耦合器外,在脉冲码盘的另外一个通道有一个透光段, 每转一圈,输出一个脉冲,该脉冲称为Z相零位脉冲, 用作系统清零信号,或坐标的原点,以减少测量的积 累误差。
2、绝对式编码器
N位绝对式编码器有N个码道,最外层的码道对 应编码的最低位。每一码道有一个光耦合器,用来读 取该码道的0、1数据。绝对式编码器输出的N位二进 制数反映了运动物体所处的绝对位置,根据位置的变 化情况,可以判别出旋转的方向。
S7-200的高速计数器有4类工作模式,共有12种。每个模 式各有不同,可通过编程,使用定义高速计数器指令HDEF来 选定工作模式。
1、高速计数器的工作模式
2、高速计数器的工作模式说明
从各个高速计数器的工作模式的描述可知:6个 高速计数器具有不完全相同的功能,最多可能有12种 工作模式,可分为四种类型。下面以HC1的工作模式 为例加以说明。
高速计数器控制指令

旋转编码器
高频脉冲可来源于控制现场,也可由旋转编码器提供。 一种旋转编码器与PLC的连接示意图
旋转编码器
+- DC24V
CPM1A PLC
00000 00001 00002 A相 B相 Z相
-DC24V +
COM
COM
各种脉冲信号的波形
单相 脉冲
1
2
3
计数脉冲
4
A超前B A滞后B
两 相 A相 脉冲 B相
通道号 位号
各位数字的含义
00 ~ 03 计数模式 ( 4:递增计数 0:增减计数)
DM6642 04 ~ 07 08 ~ 15
复位方式设定
( 0:Z信号 + 软件复位; 1:软件复位)
高速计数器使用/不使用
( 00:不使用;01:使用)
例如:DM6642的内容为 # 0114
使用高速 计数器
软件复位
目标值 比较表
表中数据可 预先写入
TB
TB+1
TB+2
TB+3 TB+4 TB+5 TB+6
目标值的个数 目标值1低4位 目标值1高4位 中断处理子程序号 目标值2低4位 目标值2高4位
中断处理子程序号
目标1 目标2
最多放16 个目标
…… ……
在高速计数器计数过程中,若其当前值与比较表中某 个目标值相同时,则停止执行主程序而转去执行与该 目标值对应的子程序。
REN (93)
SBN (92) 001
子程序001 RET (93)
END (01)
执行当前值读出 指 令 PRV , 将 248 、 249 中 的 当 前值读到LR00中 去。 若00100 ON且 有Z信号,则高 速计数器复位
西门子200smart编码器高速计数器

上述脉冲当量的计算只是理论上的推算。实际上各种误差因素不
可避免,例如传送带主动轴直径(包括皮带厚度)的测量误差,传送带 的安装偏差、张紧度,系统在工作台面上定位偏差等等,都将影响理论 计算值。脉冲当量的误差所引起的累积误差会随着工件在传送带上运动 距离的增大而迅速增加,甚至达到不可容忍的地步。须现场测试脉冲当 量值。
(HSC)指 令根
据 HSC 特 殊 内
存 位 的状 态 配 置 和控 制 高 速 计数
器。参 数 N指 定 高 速 计数 器 的 号 码。
第27页,共46页。
读取高速计数器当前值
欲存取高速计数器的计数值,您需要利用内
存类型(HC)和计数器号码(例如HC0)指定
高速计数器的地址。如下所示,高速计数器的
1 = 异常中止 1 = 异常中止
PTO管线溢出/下溢
0 = 无溢出; 1 = 溢出/下溢
PTO空闲
0 = 进行中;
1 = PTO空闲
第38页,共46页。
高速输出关联特殊寄存器
Q0.0 SM67.0 SM67.1 SM67.2 SM67.3 SM67.4 SM67.5 SM67.6 SM67.7
编码器
知识拓展-编码器
脉冲和脉冲当量
计算工件在传送带上的位置时,需确定每两个脉冲之间的距离即脉冲当 量。若某主动轴的直径为d=43 mm,则减速电机每旋转一周,皮带上工件移
动距离L=π•d=3.14×43=136.35 mm。若分辨率500 线,及旋转一周脉冲数
为500,故脉冲当量μ为μ=L/500≈0.273 mm。
SMB36至SMB65被用于监控和控制高速计数器HSC0、 HSC1和HSC2;
SMB136至SMB165被用于监控和控制高速计数器HSC3 、HSC4和HSC5。 下面,我们就对相应的特殊寄存器进行介绍
1200编码器和高速计数器的使用实验报告

1200编码器和高速计数器的使用实验报告实验目的:1. 理解1200编码器和高速计数器的原理和使用方法;2. 掌握使用1200编码器和高速计数器进行实时测速的技术。
实验仪器和设备:1. 1200编码器;2. 高速计数器;3. 示波器;4. 信号发生器。
实验原理:1200编码器是一种用于测量转速和角度的传感器,它通过感应传入的旋转物体上的光脉冲信号来确定转速和角度。
光脉冲信号由1200编码器内部的光电传感器产生,传感器会将转动的物体上的刻痕影响转化为脉冲信号。
高速计数器是一种用于计数信号脉冲的仪器,可以实时统计输入的信号脉冲数量。
通过统计信号脉冲的数量可以计算出转速和角度。
实验步骤:1. 将1200编码器的输出接口与高速计数器的输入端连接,确保连接稳固可靠。
2. 设置信号发生器产生一定频率和脉冲宽度的脉冲信号作为输入信号。
3. 打开高速计数器和示波器,设置示波器参数以监测输入信号和计数器的输出信号。
4. 开始实时测速,在示波器上观察输入信号和计数器的输出信号。
5. 根据计数器的输出信号,可以计算出转速和角度。
实验结果:根据实时测速的实验数据,可以获得转速和角度的相关结果。
根据实验需求,进行相应的数据处理和分析。
实验注意事项:1. 确保实验中连接的电路和设备稳定可靠,以避免测量误差。
2. 操作实验仪器时需要注意安全,避免电路短路或其他意外情况发生。
3. 在实验过程中,注意记录实验数据和结果。
结论:通过实验可以发现,1200编码器和高速计数器可以实现对旋转物体的实时测速和角度的测量。
实验数据可以用于对控制系统、机械系统等的分析和优化。
S7-1200 高速计数怎么用
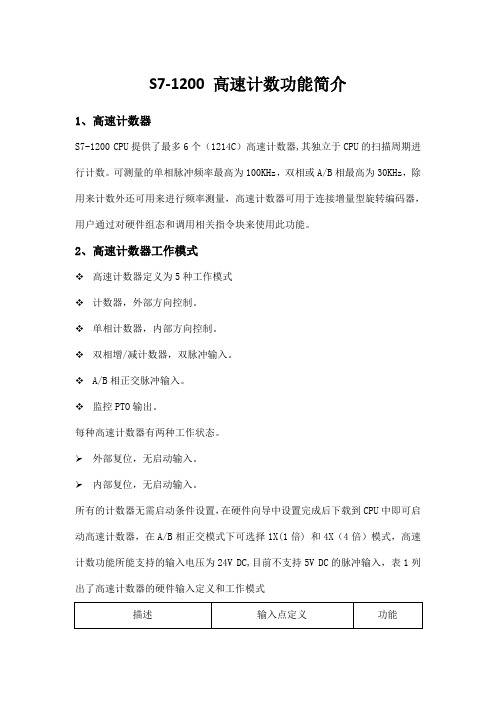
S7-1200 高速计数功能简介1、高速计数器S7-1200 CPU提供了最多6个(1214C)高速计数器,其独立于CPU的扫描周期进行计数。
可测量的单相脉冲频率最高为100KHz,双相或A/B相最高为30KHz,除用来计数外还可用来进行频率测量,高速计数器可用于连接增量型旋转编码器,用户通过对硬件组态和调用相关指令块来使用此功能。
2、高速计数器工作模式❖高速计数器定义为5种工作模式❖计数器,外部方向控制。
❖单相计数器,内部方向控制。
❖双相增/减计数器,双脉冲输入。
❖A/B相正交脉冲输入。
❖监控PTO输出。
每种高速计数器有两种工作状态。
➢外部复位,无启动输入。
➢内部复位,无启动输入。
所有的计数器无需启动条件设置,在硬件向导中设置完成后下载到CPU中即可启动高速计数器,在A/B相正交模式下可选择1X(1倍) 和4X(4倍)模式,高速计数功能所能支持的输入电压为24V DC,目前不支持5V DC的脉冲输入,表1列出了高速计数器的硬件输入定义和工作模式表1 高速计数器硬件输入定义与工作模式并非所有的CPU都可以使用6个高速计数器,如1211C只有6个集成输入点,所以最多只能支持4个(使用信号板的情况下)高速计数器。
由于不同计数器在不同的模式下,同一个物理点会有不同的定义,在使用多个计数器时需要注意不是所有计数器可以同时定义为任意工作模式。
高速计数器的输入使用与普通数字量输入相同的地址,当某个输入点已定义为高速计数器的输入点时,就不能再应用于其它功能,但在某个模式下,没有用到的输入点还可以用于其它功能的输入监控PTO的模式只有HSC1和HSC2支持,使用此模式时,不需要外部接线,CPU 在内部已作了硬件连接,可直接检测通过PTO功能所发脉冲。
3、高速计数器寻址CPU将每个高速计数器的测量值,存储在输入过程映像区内,数据类型为32位双整型有符号数,用户可以在设备组态中修改这些存储地址,在程序中可直接访问这些地址,但由于过程映像区受扫描周期影响,在一个扫描周期内,此数值不会发生变化,但高速计数器中的实际值有可能会在一个周期内变化,用户可通过读取外设地址的方式,读取到当前时刻的实际值。
S7-200高速计数器的学习解析

载入
载入
载入
载入
16#DB
是
PWM
同步
1 μ S/循环
载入
载入
经过整理,我们得到上表
高速输出指令
例题
一台步进电机,每200个脉冲旋转一圈,我们需 要它在按下I0.0后旋转20圈,速度为1圈/秒。做 出设计实现功能!
项目分析: 本项目使用步进电机,对于脉冲宽度没有要求,而对于 发出的脉冲数有要求,采用的脉冲为PTO模式发送。发 送数量为200*20=4000个脉冲。速度为1圈/S,那么脉冲 的周期应当为1000/200=5ms。 PLC选型: CPU222 DC/DC/DC
HSC0 SM37. 0 HSC1 SM47. 0 HSC2 SM57. 0 HSC3 HSC4 SM147. 0 HSC5 说明 复原现用水平控制位:0=复原现用水平高1=复原现用 水平低
SM47. 1
SM37. 2 SM37. 3 SM37. 4 SM37. 5 SM37. 6 SM37. 7 SM47. 2 SM47. 3 SM47. 4 SM47. 5 SM47. 6 SM47. 7
孙丰浩
本章已完成
谢谢
高速输出前言
脉冲周期
PKW宽度
高速输出关联特殊寄存器
Q0.0 SM66.4 SM66.5 SM66.6 SM66.7
Q0.1 SM76.4 SM76.5 SM76.6 SM76.7 PTO轮廓由于计算错误异常中止 PTO轮廓由于用户命令异常中止 PTO管线溢出/下溢 PTO空闲
状态位 0 = 无错: 0 = 无错: 0 = 无溢出; 0 = 进行中; 1 = 异常中止 1 = 异常中止 1 = 溢出/下溢 1 = PTO空闲
1200高速计数器和编码器编程实例

1200高速计数器和编码器编程实例【原创版】目录1.1200 高速计数器和编码器概述2.1200 高速计数器和编码器的编程实例3.实例总结与展望正文【1200 高速计数器和编码器概述】1200 高速计数器和编码器是一种用于测量旋转速度和位置的设备,广泛应用于自动化控制、机器人、精密测量等领域。
它们具有高精度、高速度、高可靠性等特点,能够实现对旋转轴的精确测量和控制。
【1200 高速计数器和编码器编程实例】下面以一个简单的例子来说明如何使用 1200 高速计数器和编码器进行编程。
假设我们有一个旋转轴,其转速为 1200 转/分钟,我们需要编写一个程序来测量并显示其转速。
首先,我们需要配置 1200 高速计数器和编码器。
我们将编码器连接到计数器的输入端,然后将计数器连接到计算机的接口。
接下来,我们编写程序。
程序分为两个部分,一部分是初始化,另一部分是读取和显示转速。
初始化部分,我们首先初始化计数器和编码器,然后设置计数器的工作模式为高速计数模式。
读取和显示转速部分,我们通过读取计数器的值,然后根据编码器的脉冲数计算出转速。
编码器的脉冲数是固定的,通常为 2048 或者更多,而计数器的计数值则是编码器发出的脉冲数。
因此,我们可以通过将计数器的计数值除以编码器的脉冲数,得到旋转轴的转速。
最后,我们将计算出的转速显示在计算机屏幕上。
【实例总结与展望】通过上述实例,我们可以看到,1200 高速计数器和编码器的编程相对简单。
只需要配置好设备,然后编写程序读取和处理数据即可。
然而,这只是一个基本的例子。
在实际应用中,可能需要处理更多的数据,进行更复杂的计算,甚至需要与其他设备进行协同工作。
这就需要我们更深入地了解和掌握 1200 高速计数器和编码器的编程技术。
旋转编码器和PLC高速计数器在冲击试验机数据测量中的设计应用

叶园伟 ’ ,郑 勇 ,王 金 丽 ,邓 怡 国 ,王 刚 ,张 劲
YE Yu n we ’ ZHENG o g , W ANG Jn I , DENG — o , W ANG n ZHANG i a. i , Y n i. i Yi gu Ga g , Jn
程 中 的主 要 控制 装 置之 一 。
字 化 检 测 装置 , 它 具 有 分 辨 率 及 精 度 高 、结 构 简
单 、使 用 可 靠 、 性 价 比高 等 优 点 , 广 泛 应 用 于 工
业领域 的速 度 或 角度 ( 位置 )的 检 测 。增 量 式 光
电编 码 器 是 旋 转 编 码 器 的一 种 , 主 要 由光 源 、码
能 的 电 子 装 置 。它 采 用 可 以编 程 的 存 储 器 ,执 行
逻 辑 运 算 、 顺 序 运 算 、 计 时 、 计 数 和 算 术 运 算 等 操 作 指 令 ,通 过 高 速 脉 冲 计 数 功 能 ,可 以连 接 编
码 器 脉 冲 信 号 并 进 行 处 理 ,是 当代 工 业 自动 化 过
D i1 .9 9 Jis . 09 1 4 21 .( )1 o : 3 6 / . n 1 0 -0 3 .0 5 上 .4 0 s 2
0 引 言
简 支 梁 冲 击 试 验 机 适 用 于 各 种 非 金 属 材 料 和 农 业 物 料 的 冲 击 韧 性 测试 , 是 科 研 机 构 、大 专 院
(. 1海南大学 机 电工程学院 ,儋州 5 1 3 ;2中国热带农业科学 院 农业机械研究所 ,湛江 5 4 9 ) 7 77 . 2 0 1 摘 要 :传统的简支梁 冲击试验机的测量 数据一般采用刻度盘 指针式显示 ,易造成读 数误 差、操作 不便 等缺 点。本 设计将旋 转编 码器 ̄ P O高速计数 器等 电控装置 及其功 能应 用于; OL 中击试验机 的测 量系 统中 ,分 别对 硬件 电路和控 制程序 进行设 计和编 程 ,使 试验机 冲击测 量结果 由刻度 盘的 指针显示 转化为数字显示 ,从而 达到提高冲击试验机 测量精度和使用方便性 之目的。 关键 词 :冲击 试验 机 ;旋转编码器 ;P C高速计数器 L 中图分类号 :T 6 H 文献标识码 :A 文章编号 :1 0 -0 3 ( 0 2 o < -0 4 -0 9 1 4 2 1 ) 5 上) 0 4 3 0
编码器的脉冲计数、高速计数器小总结

我们一般采用高速输出信号控制步进电机和伺服电机做位置,角度和速度的控制,比如定位,要实现这个目的,我们要知道这几个条件:1、PLC高速输出需要晶体管输出,继电器属于机械动作,反应缓慢,而且易坏2、以三菱PLC为例,高速输出口采用Y0 、Y13、高速输出指令常用的有PLSY 脉冲输出PLSR 带加减速PLSV……可变速的脉冲输出ZRN……原点回归DRVI……相对定位DRVA……绝对定位4、脉冲结束标志位M80295、D8140 D8141 为Y0总输出脉冲数6、在同一个程序里面Y0做为脉冲输出,程序可以存在一次,当需要多次使用的时候,可以采用变址V进行数据的切换,频率,脉冲在不同的动作模式中,改变数据正对上述讲解的内容:我们用一个程序来表示若我们以后可能接触步进。
伺服这一块,上述内容,大家一定要熟练掌握!23、PLC编程实现编码器的脉冲计数在高速计数器与编码器配合使用之前,我们首先要知道是单向计数,还是双向计数,需要记录记录的数据,需要多少个编码器,在PLC中也需要多少个高速输入点,我们先要确认清楚。
当我们了解上面的问题以后,参照上题的寄存器分配表得知我们该选择什么高速计数器如:现在需要测量升降机上升和下降的高度,那么我们需要采用双向编码器,即可加可减的,AB相编码器,PLC需要两个IO点,查表得知,X0 X1为一路采用C251高速计数器那么我们可以这样编程,如图开机即启动计数,上升时(方向),C251加计数下降时(方向),C251减计数我们要求编码器转动的数据达到多少时,就表示判断实际升降机到达的位置注意:在整个程序中没有出现X0、X1这个两个软元件?是因为C251为X0、X1的内置高速计数器,他们是一一对应的,只要见到c251,X0 X1就在里面了,当然,用了C251以后,X0 、X1不能在程序里面再当做开关量使用了接线参照下图21、我们对高速计数器的理解及编程相对11题定时器和计数器来说,本题目主要是告诉大家学习高数处理的功能PLC内部高速计时器是计数器功能的扩展,高速计数器指令与定位指令使PLC的应用范围从逻辑控制、模拟量控制扩展到了运动控制领域。
欧姆龙CP1H和增量编码器高数计数器程序案例
欧姆龙 CP1H 系列 PLC 和增量编码器高速计数器程序案例
同享成功经验 共创中国未来
您是否因为身边没有一位良师而感到困惑 您是否因为手上没有专业资料而无从下手 您是否因为没有积蓄一定经验而胆怯迷茫
那么我们这份资料,希望能帮您解决心中的困惑
十年经验
现场总结
成功应用
目录
EX 型 4点 100KHZ 脉冲Байду номын сангаас方向 加减法脉冲 加法脉冲
本案例使用的是 E6B2-CWZ6C (1000) 0.5M 型号,即一圈脉冲 1000P,NPN 类型。
外径φ40 标准型 • 增量型 • 外径:φ40 • 分辨率 (大):3,600P/R • 对应电源电源 DC5-24V (集电极开路输出型) • 实现轴负重、径向 30N、轴向 20N • 附有逆接、负荷短路保护回路,改善了可靠性 • 丰富的输出型式可供选择, • 备有互补输出、线性驱动输出型式对应远距离传输
一、 产品介绍.......................................................................................................................- 1 1. CP1H 系列 PLC 在高速计数器应用上的特点..................................................................- 1 2. 增量型编码器 E6B2-CWZ6C 常用技术参数.....................................................................- 1 二、 电气接线.......................................................................................................................- 2 1. PLC 使用编码器端口接线情况介绍................................................................................- 2 2. PLC 控制器和 E6B2-CWZ6C 编码器接线图......................................................................- 2 三、 程序编写.......................................................................................................................- 3 1. 在编程软件上进行高速计数器参数设置.......................................................................- 3 2. 四路高速计数器对当前位置清零程序编写...................................................................- 3 3. 四路高速计数器读取编码器当前位置程序编写...........................................................- 4 4. 四路高速计数器读取编码器当前频率程序编写...........................................................- 4 四、 高速计数器在自动化行业应用情况分析...................................................................- 5 1. 高速计数器读取位置在自动化行业应用场合分析 .......................................................- 5 2. 高速计数器读取频率在自动化行业应用场合分析 .......................................................- 5 五、 成功经验总结...............................................................................................................- 6 1. 应用感受...........................................................................................................................- 6 2. 需要注意事项...................................................................................................................- 6 -
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例题
编写一个高速计数程序,将I0.6的输入模式设置高速计数 ,为A/B正交计数,由外部信号启动和复位。当计数值为50 的时候将计数值清零重新计数。
• 项目分析: 1)项目使用模式为: A/B正交计数,由外部信号启动 和复位。所以,我们选择工作模式为“11”; 2)输入端使用I0.6,我们根据模式选择定义使用的高 速计数器为:HSC1(I0.6为A相,I0.7为B相, I1.0为复位, I1.1为启动) 3)由于使用的是HSC1,我们需要选择CPU224以上 的CPU型号
苏州健雄职业技术学院
5
程序设计
设计思路:
一、传送带运行控制:
1、变频器参数设置 2、变频器运行控制
二、分拣继电器控制:
1、精准定位?
2017/10/6
苏州健雄职业技术学院
6
知识拓展——旋转编码器
旋转编码器是用来测量转速的装置,光电式旋 转编码器通过光电转换,可将输出轴的角位移 、角速度等机械量转换成相应的电脉冲以数字 量输出(REP)。
SM57. 1
SM57. 2 SM57. 3 SM57. 4 SM57. 5 SM57. 6 SM57. 7 SM137. 3 SM137. 4 SM137. 5 SM137. 6 SM137. 7 SM147. 2 SM147. 3 SM147. 4 SM147. 5 SM147. 6 SM147. 7 SM157 .3 SM157 .4 SM157 .5 SM157 .6 SM157 .7
2017/10/6
苏州健雄职业技术学院
15
S7-200 高速计数器基础
高速计数器对CPU扫描速率无法控制的高速事件进行计数,最多可配 置12种不同的操作模式。高速计数器的最高计数频率取决于CPU类型 。 其中CPU222和CPU221没有HSC1和HSC2
S7-200 高速计数器基础
模式0、 1、 2 的计数方式
HSC4
SM146. 0 SM146. 1 SM146. 2 SM146. 3 SM146. 4 SM146. 5 SM146. 6 SM146. 7
HSC5
SM156. 0 SM156. 1 SM156. 2 SM156. 3 SM156. 4 SM156. 5 SM156. 6 SM156. 7
SM36.6
SM36.7
SM46.6
SM46.7
SM56.6
SM56.7
状态位
S7-200 高速计数器指令
高速计数 器定义 (HDEF) 指令选择 特定的高 速计数器 (HSCx) 的操作模 式。模式 选择定义 高速计数 器的时钟、 方向、起 始和复原 功能。
例:将HSC0设置 成计数模式1
S7-200 高速计数器指令
控制字节
S7-200 高速计数器特殊寄存器
载入 数值 新当 前值 新预 设值 HSC0 HSC1 HSC2 HSC3 HSC4 HSC5
SMD3 SMD4 SMD5 SMD1 SMD1 SMD1 8 8 8 38 48 58 SMD4 SMD5 SMD6 SMD1 SMD1 SMD1 2 2 2 42 52 62
起始现用水平控制位:0=起始现用水平高1=起始现用 水平低
正交计数器的计数速率选项:0=4x计数速率1=1x计数 速率 计数方向控制位:0 = 向下计数1 = 向上计数 向HSC写入计数方向:0 = 无更新1 = 更新方向 向HSC写入新预设值:0 = 无更新1 = 更新预设值 向HSC写入新当前值:0 = 无更新1 = 更新当前值 启用HSC:0 = 禁用HSC1 = 启用HSC
2017/10/6
苏州健雄职业技术学院
2
电路设计
主电路设计
2017/10/6
苏州健雄职业技术学院
3
电路设计
控制电路设计
交流电机接线图
CPU224XP 晶体管 (DC/DC/DC)
COM 编码器A相(19) 编码器B相(20) (上料)光电传感器检测(10) (金属)电感传感器检测(13) (尼龙)电容传感器检测(16) 启动 停止 I0.0 I0.1 1L+ V M 电磁铁(23) 绿灯(25) 红灯(26) 黄灯(24) DIN1 DC24V + 西门子 MM420/440 变频器 +24V AIN+ AINU V W 交流电机
高速计数器 (HSC)指 令 根 据 HSC 特 殊内存位的 状态配置和 控制高速计 数 器。参 数 N 指定高速计 数 器 的 号 码。
读取高速计数器当前值
欲存取高速计数器的计数值,您需要利用 内存类型(HC)和计数器号码(例如HC0 )指定高速计数器的地址。如下所示,高 速计数器的当前值是只读数值,只能作为 双字(32位)编址。 格式:HC[高速计数器号码] 例如:HC2
说明
未使用 未使用
SM36.2
SM36.3 SM36.4 SM36.5
SM46.2
SM46.3 SM46.4 SM46.5
SM56.2
SM56.3 SM56.4 SM56.5
未使用
未使用 未使用 当前计数方向状态位:0 = 向下计数;1 = 向上计数 当前值等于预设值状态位:0 = 不相等;1 = 等于 当前值大于预设值状态位:0 = 小于或等于; 1 = 大于
知识拓展——旋转编码器
编码器的分类 编码器按照信号电压分类:24V和5V 按照信号类型分为:绝对式编码器、增量式编码器、混合式编码器 绝对值编码器为每一个轴的位置提供一个独一无二的编码数字值 。 增量式编码器轴的每圈转动,增量型编码器提供一定数量的脉冲 。 按照信号采集方式分为:单倍频和四倍频
2017/10/6
苏州健雄职业技术学院
10
知识拓展-编码器
编码器
一般来说,根据旋转编码器产生脉冲的方式的不同,可以分为增量式 、绝对式以及复合式三大类。自动线上常采用的是增量式旋转编码器 。
2017/10/6
苏州健雄职业技术学院
11
知识拓展-编码器
编码器
增量式编码器是直接利用光电转换 原理输出三组方波脉冲A、B 和Z 相; A、B 两组脉冲相位差90,用于辩向: 当A相脉冲超前B 相时为正转方向,而 当B相脉冲超前A 相时则为反转方向。 Z 相为每转一个脉冲,用于基准点定 位。如图所示。
在使用高速计数功能的时候,需要修改系统内 的部分特使寄存器。以改变我们的计数模式。 SMB36至SMB65被用于监控和控制高速计数器 HSC0、HSC1和HSC2; SMB136至SMB165被用于监控和控制高速计数 器HSC3、HSC4和HSC5。 下面,我们就对相应的特殊寄存器进行介绍
S7-200 高速计数器特殊寄存器
M
I0.2 Q0.0 I0.3 Q0.1 I0.4 Q0.2 I0.5 Q0.3 I0.6 Q0.4
说明:(1)启动、停止接JDO2A的点动按钮或直接用钮子开关代替。 (2)接线时,应结合接线原理图及端子接线说明,确保接线无误。
2017/10/6
苏州健雄职业技术学院
4
电路设计
PLC I/O分配
2017/10/6
2017/10/6 苏州健雄职业技术学院 13
知识拓展-编码器
编码器接线方式
2017/10/6
苏州健雄职业技术学院
14
知识拓展-高速计数器
高速计数,计数自动进行,不受扫描周期的影响,用于捕 捉比CPU扫描速度更快的事件。当前值等于预置值、计数 方向改变或发生外部复位时,可产生中断。在中断程序中 ,可实现高速运动的精准控制等预定操作。 PLC :S7-224XP DC/DC/DC 集成有6 点的高速计数器, 编号为HSC0~HSC5,每一编号的计数器均分配有固定地址 的输入端。同时,高速计数器可以被配置为12 种模式中 的任意一种。
高速输出前言
S7-200自带了两个高速输出Q0.0和Q0.1(仅限 DC输出) 高速输出的分类: 分为两种:PTO和PWM
PTO提用户控制功能。 PWM提供连续性变量占空比输出,配备周期和脉 宽用户控制功能。
高速输出前言
PTO脉冲数 脉冲周期
高速输出前言
脉冲周期
PKW宽度
高速输出关联特殊寄存器
Q0.0 SM66.4 SM66.5 SM66.6 SM66.7
HSC0 SM37. 0 HSC1 SM47. 0 HSC2 SM57. 0 HSC3 HSC4 SM147. 0 HSC5 说明 复原现用水平控制位:0=复原现用水平高1=复原现用 水平低
SM47. 1
SM37. 2 SM37. 3 SM37. 4 SM37. 5 SM37. 6 SM37. 7 SM47. 2 SM47. 3 SM47. 4 SM47. 5 SM47. 6 SM47. 7
基于编码器、高速计数器的 交流电机传动控制系统
2017/10/6
苏州健雄职业技术学院
1
控制要求
分拣装置
按下启动按键,并且检测到传送带上有工件,变频器带动交流电
机工作,从而使传送带带动工件前行。若检测到此工件为金属材质, 则分拣到A站,若为非金属塑料材质,则分拣到B站。按下停止按键, 整个循环停止。
例题
程序设计:在首次运行时需要对 高速计数器参数初始化,初始化程 序为SBR_0
例题
将HSC1的预设值和当前值设置为允许更新, 方向允许更新,4倍频的向上计数
•
将HSC1的计数模式设置为11
•
将HSC1的当前值更新为0
•
将HSC1的预设值设置为50
子程序SBR_0
例题
•
设置中断为预设值=当前值,触发中断INT_0
S7-200 高速计数器基础
模式3、 4、 5 的计数方式