力矩电机调速控制器的设计
利用DSP实现的步进电机控制器的设计
利用DSP实现的步进电机控制器的设计数字信号处理(Digital Signal Processing,简称DSP)是一门涉及许多学科而又广泛应用于许多领域的新兴学科。
20世纪60年代以来,随着计算机和信息技术的飞速发展,数字信号处理技术应运而生并得到迅速的发展。
数字信号处理是一种通过使用数学技巧执行转换或提取信息,来处理现实信号的方法,这些信号由数字序列表示。
在过去的二十多年时间里,数字信号处理已经在通信等领域得到极为广泛的应用。
德州仪器、Freescale等半导体厂商在这一领域拥有很强的实力。
TMS320LF2407是TI公司主推的一种高性能、低价格DSP处理器,其处理速度达到30 MIPS,片内处理集成RAM、Flash及定时器外,还集成了A/D转换器、PWM控制器及CAN总线控制器等模块,特别适合于电机、电源变换等实时要求高的控制系统。
但是通常设计DSP程序的方法是,在DSP的集成开发环境CCS中用C语言设计,需要花费大量的时间用来编写和输入程序代码。
在Matlab中用图形化的方式设计DSP的程序,能够缩短产品的开发时间。
本文所介绍的是一种基于TMS320LF2407实现的步进电机控制系统的设计。
1 系统硬件构成整个系统分为五个部分组成:DSP中央控制器TMS320LF2407,步进电机及驱动,光电编码器,键盘及液晶显示部分,以及整个系统的外围电源电路及看门狗复位电路组成,。
在这个系统设计中,由键盘设定给定转速(位置),通过中央控制器TMS320LF2407来产生PWM脉冲信号来控制步进电机的转速(位置),可以采用光电编码器对步进电机的转速(位置)进行采样检测实现闭环控制,也可以采用开环控制无需转速(位置)信号,以上过程中的多个变量、参数可以在液晶显示屏上得到直观地反映。
整个硬件结构简单直观,中央控制器TMS320LF2407还剩余丰富的I/O及中断资源,在此设计基础上具有一定的扩展空间。
力矩电机控制器原理

力矩电机控制器原理力矩电机控制器是一种用于控制力矩电机的设备,它通过对电机的电流进行精确调节,实现对电机的速度、转矩和位置的精准控制。
在工业生产和自动化领域,力矩电机控制器被广泛应用,其原理和工作方式对于了解力矩电机的控制和应用具有重要意义。
力矩电机控制器的原理主要包括电流控制、速度控制和位置控制。
在电流控制方面,控制器通过对电机施加不同的电流,来调节电机的转矩和输出功率。
电流控制是力矩电机控制的基础,也是实现电机精准控制的关键。
在速度控制方面,控制器通过对电机施加不同的电压和频率,来调节电机的转速。
速度控制可以实现对电机转速的精确调节,适用于需要频繁变速的场合。
在位置控制方面,控制器通过对电机施加不同的脉冲信号,来控制电机的位置和运动轨迹。
位置控制可以实现对电机位置的精确控制,适用于需要高精度定位的场合。
力矩电机控制器的原理基于电磁学和控制理论,通过对电机的电流、电压和脉冲信号进行精确控制,实现对电机的速度、转矩和位置的精准调节。
在实际应用中,力矩电机控制器通常与传感器、编码器和控制算法配合使用,实现对电机的闭环控制。
闭环控制可以实时反馈电机的状态信息,对电机进行更精准的控制,提高系统的稳定性和响应速度。
力矩电机控制器的原理对于理解力矩电机的控制和应用具有重要意义。
掌握力矩电机控制器的原理,可以帮助工程师和技术人员更好地设计和应用力矩电机控制系统,提高系统的性能和可靠性。
同时,了解力矩电机控制器的原理,也有助于对电机控制技术的深入理解,为相关领域的研究和应用提供理论支持。
总之,力矩电机控制器是一种重要的电机控制设备,其原理包括电流控制、速度控制和位置控制。
掌握力矩电机控制器的原理,对于理解电机控制技术和应用具有重要意义,有助于提高系统的性能和可靠性,推动相关领域的发展和进步。
无锡电动车控制器方案
无锡电动车控制器方案1. 简介本文档介绍了无锡电动车控制器方案,包括控制器的工作原理、功能模块和设计要点。
通过本文档,读者将了解到无锡电动车控制器的基本知识和设计流程。
2. 工作原理无锡电动车控制器是一种用于控制电动车驱动系统的设备。
它接收来自电池的电流作为输入信号,并通过控制电机的转速、力矩和方向来控制电动车的运行。
控制器的工作原理如下: 1. 接收输入信号:控制器从电池接收电流作为输入信号。
2. 处理输入信号:控制器通过电路将输入信号转化为控制电机的信号。
3. 控制输出信号:控制器通过输出信号控制电动车的电机,实现电动车的运行控制。
3. 功能模块无锡电动车控制器通常包含以下功能模块:3.1 电源管理模块电源管理模块用于对电池进行管理,包括电池电压监测、电流检测和电池充电控制等功能。
3.2 电机控制模块电机控制模块是无锡电动车控制器的核心模块,用于控制电动车的电机转速、力矩和方向。
该模块通常采用PWM技术来调节电机的转速,并通过H桥电路控制电机的方向。
3.3 处理器模块处理器模块用于对输入信号进行处理,并生成控制电机的信号。
该模块通常采用嵌入式处理器,如ARM、AVR等。
3.4 通信模块通信模块用于与其他设备进行数据传输。
例如,通过与电动车的显示屏通信,实现数据的显示和控制。
3.5 保护模块保护模块用于保护电动车控制器和电机,防止过电流、过压、过温等情况的发生。
该模块通常包括过流保护、过压保护、过温保护等功能。
4. 设计要点设计无锡电动车控制器时需要考虑以下要点:4.1 功能需求根据电动车的使用场景和需求,确定控制器的功能需求,包括转速范围、力矩控制、刹车功能等。
4.2 效率与功率控制器的效率和功率是设计过程中需要考虑的重要因素。
通过合理选择电路和元器件,可以提高控制器的效率和功率。
4.3 电路设计电路设计是控制器设计的关键环节,包括电源管理模块、电机控制模块、处理器模块等的设计。
需要选择合适的电路方案,并进行电路设计和仿真。
基于FPGA的EMB力矩电机控制器设计

基于FPGA的EMB力矩电机控制器设计
李伯全;田洪胜;王瑞;董现伦;张向珂
【期刊名称】《机械设计与制造》
【年(卷),期】2010(000)007
【摘要】针对电子机械制动系统(EMB)的执行装置,研究设计一种以FPGA为核心的EMB力矩电机控制器.论证了加装力矩传感器对电机进行精确控制的控制策略,在单片FPGA上完成EMB 力矩电机的驱动波形发生、闭环控制运算功能.驱动波形的发生由FPGA基本逻辑语言实现,闭环控制运算由DSPBilder模块完成,最后在Quartusll软件对电机控制的各个模块进行了编程和仿真.实验表明系统硬件和软件设计合理,FPGA应用在电机控制方面具有很好的可靠性和实时性.
【总页数】3页(P9-11)
【作者】李伯全;田洪胜;王瑞;董现伦;张向珂
【作者单位】江苏大学,机械工程学院,镇江,212013;江苏大学,机械工程学院,镇江,212013;江苏大学,机械工程学院,镇江,212013;江苏大学,机械工程学院,镇
江,212013;江苏大学,机械工程学院,镇江,212013
【正文语种】中文
【中图分类】TH12
【相关文献】
1.基于FPGA的EMB中无刷直流电机扭矩控制器设计 [J], 张凯;马平;黄鑫;王栋
2.基于FPGA的CRT控制器设计与实现--HD6845、MC6845软核设计 [J], 尹淑
仙;徐火生
3.基于FPGA的控制器局部网(CAN)总线控制器设计 [J], 胡为;王宏斌
4.基于微控制器和FPGA的高可靠步进电机控制器设计 [J], 刘涛;张大鹏
5.基于FPGA的汽车EMB系统设计 [J], 李孟
因版权原因,仅展示原文概要,查看原文内容请购买。
力矩电机控制器 工作原理
本控制器为代替三相自耦变压器,而专门设计的一种先进的全电子化控制装置,能工作在电阻、电感性负载。
广泛适用于五金机械塑料、电线、电缆、绳网、印刷、造纸、纺织、印染、化疑纤、橡绞、电影胶皮等各种机械、机电行业。
与三相自藕调压器相比较,本控制器由于采用了电子调节,无触点磨损,电压调节平衡,起动性能好,本控制器具有体积小、重量轻、效率高、发热小、节约能源(经测定平均节能17%以上),使用寿命长、安装、维修方便。
二、工作条件:1、环境温度:-25℃~+55℃。
2、空气相对湿度:≤85%(20℃±5℃)。
3、无显著冲击震动外。
4、工作电压:三相电压交流380V、220V(±10%)。
5、50~60HZ。
三、工作原理:三相调压器调速控制器主回路采用进口双向可控硅,改变可控制硅的开放角大小,就能使电机或其它负载的工作电压从0至375V连续可调,也就实现了平衡地调压调速过程,以满足不同生产的工艺要求。
在可控硅控制电路中采用了三相同步集成模块,加入了电流正反馈,构成一个闭环控制系统。
既提高了力矩电机的机械性硬度,又改善了力矩电机在低电压时的起动性能,同时还提高了力矩电机的过载能力,扩大了力矩电机的使用范围。
为了使调速过程尽快进入稳定状态,在控制回路中还加入了电压反馈,以提高控制器的技术性能。
四、使用方法:接线说明:请严格按以下接线示意图接线,D1、D2、D3三点为控制器的输出端,接力矩电机的电源线柱W1V1U1(Ⅱ型力矩电机必须为Y接法及星型接法,电机中性点W2V2U2必须严格接电源零线N,否则,本控制器无法正常工作或烧毁本装置。
)1、调速旋钮旋至零位。
2、接通总电源,打开控制器开关。
(指示灯亮)3、整好面板上反馈设定按键。
(一般不需调节,出厂时已按常规设定好,可适用不同启动电压的力矩电机)。
4、调节调速电位器旋钮,使电机达到你所需的速度。
5、调节电位器为精密型线绕电位器。
五、注意事项:1、严禁输出短路。
直线电机的PID控制器设计

直线电机的PID控制器设计直线电机是一种常用于工业自动化控制系统中的电动机,它具有结构简单、性能优越等优点,广泛应用于数控机床、自动化生产线等领域。
PID控制器是一种常用的控制算法,可以对直线电机进行精确的位置、速度和力矩控制。
1.系统建模:首先需要对直线电机进行建模,得到其数学模型。
直线电机的数学模型可以通过动力学方程来描述,其中考虑到机械和电磁的相互作用。
根据直线电机的特性,可以得到其动力学方程,例如:Mi=Ke*Ie-Fe-Ff-FvVi=Kt*i其中Mi为直线电机的力矩,Ke为电动势常数,Ie为电流,Fe为电磁力,Ff为摩擦力,Fv为外部干扰力,Vi为速度,Kt为电动势常数,i为电流。
2. 参数调整:在PID控制器中,P代表比例控制,I代表积分控制,D代表微分控制。
需要根据实际情况对这三个参数进行调整,以达到最优的控制效果。
参数调整可以通过试验或者计算的方式进行。
常见的调参方法有Ziegler-Nichols方法、最小二乘法等。
3.控制策略选择:根据实际需求,选择合适的控制策略。
直线电机的PID控制器可以采用位置控制、速度控制或者力矩控制策略。
根据电机的特点和应用场景,选择合适的控制策略。
4.实施控制算法:将PID控制器算法实施到直线电机的控制系统中。
使用编程语言或者控制器硬件进行实现,将参数调整好的PID控制器算法应用到直线电机的控制系统中。
5.闭环控制:PID控制器是一种闭环控制算法。
在实际使用中,需要通过传感器获取直线电机的实际位置、速度或者力矩,然后将其与期望值进行比较,计算出控制信号,对直线电机进行调节。
通过反馈控制,使得直线电机的输出与期望输出尽可能接近,实现精确的控制。
在PID控制器设计中,还需要考虑以下几个因素:1.控制器输出:PID控制器通过计算得到的控制信号,需要转换成适合直线电机的输入信号。
可以通过电流、电压加以控制。
2.控制器稳定性:PID控制器需要保持系统的稳定性,以确保输出结果不会出现震荡、持续偏差等情况。
BLDC电机驱动系统的设计与控制

BLDC电机驱动系统的设计与控制一、引言随着电气化和智能化时代的到来,电机的应用日益广泛,其中包括无刷直流电机(Brushless DC Motor,BLDC)的应用。
BLDC 电机比传统的有刷电机在功率,效率,噪音等方面更加优越,逐渐成为热门的电机类型。
本文旨在介绍BLDC电机驱动系统的设计与控制。
二、BLDC电机的结构与工作原理BLDC电机由定子和转子组成。
定子由绕组、铁芯、端盖和轴承组成,转子由永磁体、轴和转子芯组成。
BLDC电机通过由无刷交流电动机电控制器驱动,由交流电源产生的交流电能转换成直流电源驱动电机,交换电流的方向使电机转速单向改变。
BLDC电机的转子上装有永久磁体,当电磁铁控制摆臂(电子换向器)的电流发生改变时,摆臂上的电流也发生改变,使摆臂产生磁力作用于转子上的永磁体,电机将按程序旋转。
BLDC电机利用电子励磁器(ESC)驱动,在驱动上根据电机合理功率和电机特性选择适当的PWM频率进行控制。
电机转子位置由电子励磁器通过观察电极式绝缘体旋转特性来确定。
三、BLDC电机驱动系统设计BLDC电机驱动系统主要由以下部分组成:1. 电机本体:包含电机的绕组、转子、定子、永磁体、轴承等元件。
2. 电机控制系统:主要是控制模块和功率驱动模块。
控制模块包括控制器、检测器、电源系统和信号输入系统等等;功率驱动模块包括电机驱动芯片、电源菜单、PWM驱动芯片、电源管理芯片等。
3. 电机驱动源:主要是DC电源,驱动电机需要定电压和定电流,详细的如下表格所示。
驱动电机的参数 | DC电源参数---|---Phase (U, V, W) | DC 驱动电压电机频率 | DC驱动电压电机转速 | DC 驱动电流电机力矩 | DC驱动电流(最大)表1:BLDC电机的驱动参数在BLDC电机驱动系统中,电子控制器扮演着重要的角色,电子控制器负责将输入信号转化为驱动电机的信号,控制电机正反转、转速、制动等操作。
其中,输入信号通常采用角度位置传感器进行电气信号准确定位,从而实现闭环速度控制。
基于力矩控制的电动助力车控制器的设计

毕业设计(论文)学院名称学院名称专业名称专业名称学生学号学生学号学生姓名学生姓名指导教师教授姓名助理指导老师老师姓名202 年月基于力矩控制的电动助力车控制器的设计摘要这几年来,燃油交通工具由于尾气排放的问题已经对城市的空气造成了严重的污染。
社会在大力发展经济的同时,由于燃油车在耗油量上越来越大,环境污染问题以及资源短缺问题越来越严重了。
因此,发展“绿色”交通工具是一个很好且很重要的课题。
电动助力车便是在这样的背景下发展和兴起起来。
但是就目前而言,大部分的电动助力车产品的控制装置都是采用低集成度的元件,这样导致了功能太过简单,从而无法充分发挥系统的潜力和处理一些特殊的控制问题。
然而我的控制器的控制芯片是采用了ATMEL公司51系列单片机AT89C51,通过力矩式助力传感器来智能的调节无刷直流电机的转速。
在硬件方面,进行了微控制单元电路设计、以MC33033芯片为核心的三相全桥驱动电路设计、以DS12887芯片为核心的时钟电路设计、系统硬件保护电路设计和显示电路设计。
在软件方面,采用了模块化编程的思想,给出了本控制系统的软件设计思路。
根据无刷直流电机的控制原理,对系统的控制部分进行了详细分析。
同时,系统具有过流保护、欠压报警及过热保护功能。
我的控制器提高了无刷直流电机的利用率以及维护的方便性。
这样的控制系统的电动助力车,具有零空气污染、低噪音、高效率,运行性能良好的特点,做到了真正意义上的“绿色”交通工具,有着广阔的发展潜力以及巨大的市场潜力。
关键词:“绿色”交通工具;电动助力车;力矩式助力传感器;无刷直流电机Design Of Controller For Electronic Power Bicycle Based On Torque ControlAbstractOver the past few years, fuel transportation as the exhaust problem has caused serious air pollution of the city. With the development of economy, the traditional fuel vehicles sharp increase in fuel consumption, environmental problems and energy crisis problem become increasingly serious, therefore, development of "green" transport is a very good and very important topic. Electric moped is under the background of the development and rise up. But for now, most of the electric moped product control device with low integration element, this led to a function is too simple, to bring into full play the potential of the system and deal with some special control problem. However my controller control chip is used the ATMEL company 51 series single chip microcomputer AT89C51, through the torque type power sensors to intelligent control of brushless dc motor speed. In terms of hardware, the micro control unit circuit design, MC33033 chip as the core of three-phase full bridge drive circuit design, DS12887 chip as the core of clock circuit design, design of system hardware protection circuit and display circuit design. In the aspect of software, adopts the modular programming ideas, the control system software design are given. According to the principle of brushless dc motor control, the control parts of the system are analyzed in detail. At the same time, the system has over current protection, under-voltage alarm and overheating protection function. I raise the utilization rate of brushless dc motor controller and maintenance convenience. Such a control system of electric moped, with zero air pollution, low noise, high efficiency, good running performance, the characteristics of did in the true sense of "green" transport, with wide development potential and huge market potential.Keywords: “Green” vehicles;Electric power Bicycle;Torque type power sensor;BLDC motor目录摘要 (II)ABSTRACT (III)1绪论 (1)1.1研究背景和意义 (1)1.2电动助力车的原理和组成结构及其特点 (1)1.3电动助力车领域在国内外的现状 (2)1.4本设计的主要工作 (2)2智能型电动助力车控制器方案的确定 (4)2.1电动助力车的控制方式 (4)2.2力矩传感器的基本原理及方案选定 (4)2.3电动助力车控制器的总体方案 (4)3无刷直流电机及其驱动控制电路 (6)3.1无刷直流电机的特点 (6)3.2无刷电机的驱动控制电路 (6)4单片机及其外围硬件电路的设计 (10)4.1单片机概述及AT89C51简介 (10)4.2单片机外围硬件电路的选择与设计 (12)4.2.1模数与数模转换模块 (12)4.2.2时钟芯片 (15)4.2.3温度传感器和液晶显示模块 (17)5系统相关技术及软件设计 (20)5.1控制系统相关技术 (20)5.2系统软件设计 (22)5.2.1主程序的设计 (22)5.2.2部分模块的软件设计 (22)结论 (28)致谢 (29)参考文献 (30)1 绪论1.1 研究背景和意义二十一世纪最为突出的两大主题,一个是保护环境,另一个便是节约能源。
电动车控制器设计方案
电动车控制器设计方案一、电动车控制器的组成部分电动车控制器是电动车整车中的核心部分,其技术性能的优劣直接影响电动车的正常使用。
目前电动车用有刷无刷控制器普遍采用PWM方式,控制器内部必须具有PWM发生器电路,另外还有电源电路、功率器件、功率器件驱动电路、控制部件(转把、制动把、电动机霍尔元件等)信号的采集与处理电路、过电流与欠电压等保护电路。
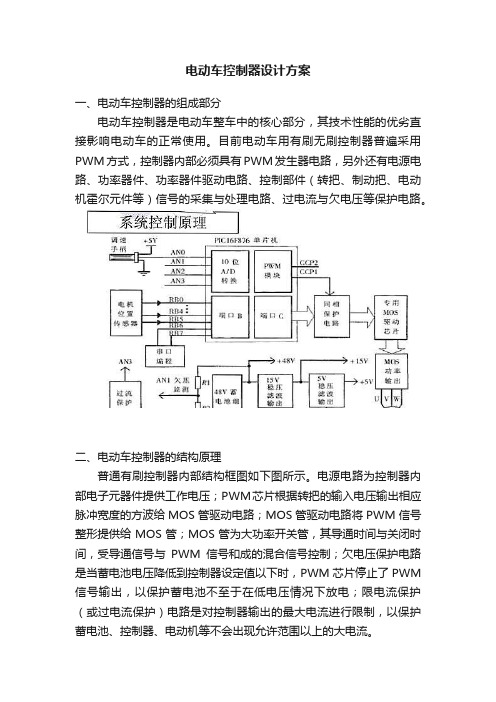
二、电动车控制器的结构原理普通有刷控制器内部结构框图如下图所示。
电源电路为控制器内部电子元器件提供工作电压;PWM芯片根据转把的输入电压输出相应脉冲宽度的方波给MOS管驱动电路;MOS管驱动电路将PWM信号整形提供给MOS管;MOS管为大功率开关管,其导通时间与关闭时间,受导通信号与PWM信号和成的混合信号控制;欠电压保护电路是当蓄电池电压降低到控制器设定值以下时,PWM芯片停止了PWM 信号输出,以保护蓄电池不至于在低电压情况下放电;限电流保护(或过电流保护)电路是对控制器输出的最大电流进行限制,以保护蓄电池、控制器、电动机等不会出现允许范围以上的大电流。
三、电动机控制器的接线1、无刷电动机控制器接线无刷电动机控制器接线有多有少,一般有以下几条(线的颜色根据常用类型总结,不能代表所有线的颜色都一样):电源线两条(红色线、黑色线)、转把线三条(红色线、蓝色线、黑色线)、制动断电线两条(黄色线、黑色线)、电子制动线两条(灰色线、黑色线)、电动机线两条(绿色线、蓝色线)、霍尔输入线四条(蓝色线、绿色线、红色线、黑色线)、倒车线一条(黄色线)、助力信号线三条(红色线、绿色线、黑色线)。
2、有刷电动机控制接线有刷电动机控制接线一般有以下几条:电源线两条、转把线三条、电动机线两条、制动断电线两条、限速线两条等。
四、控制器接线示意图在电动车控制器中广泛应用,方波驱动最大的缺点在于换相时的电流突变引起的转矩脉动,导致噪声较大,但好的控制策略可以大大改善换相噪声。
电动车控制器设计的难点在于电流控制,本文就电动车控制器设计的一些关键地方加以描述。
高性能高精度力矩电机伺服控制系统设计

K e r s:t r e mo o ; s i o s se ;c nto n t o r d ie ; DS y wo d o qu tr e' y tm v o r lu i ;p we rv r P
0 引 言
近年 来 ,直 接 驱 动 技 术 因其 传 动 系 统 刚 性 好 , 无传 动 间隙 、无 磨 损 和 可 靠 性 高 等诸 多 优 点 ,在 航 空制 造业 和高 速 加 工 中心 设 备 等领 域 的 应 用 越 来 越
广泛 。直 接驱 动 技 术 最 典 型 的 应 用 就 是 电 主轴 、力 矩 电机 和直线 电机 … 。
对力矩电机的具体特点,采用相对先进 的 、复杂 的
而且更有效的控制算法。本文将 以力矩 电机为控制
第4 5卷 第 2期
21 0 2年
徽 ' 机 《 }
MI CROMOT ORS
Vo. 5. No 2 14 . Fe . 0l b2 2
2月
高 性 能 高精 度 力矩 电机 伺 服 控 制 系统 设 计
高 月 波 ,王 勉 华 ,张 国平 ,吴 卫 安
( .西安科技大学 电气与控制工程学院 , 1 西安
2 .深 圳 市 大 族 电机 科 技 有 限 公 司 ,广 东 深 圳
7 05 104;
585 ) 10 7
摘
要 :大扭 矩力矩电机是高档数控机床的关键基础部件 , 其伺服 系统控制性 能优劣 直接影 响机电设备 的控 制质量 。
文章 简要介绍 了大扭矩 力矩电机的基本控制特性 ,着重介绍 了一种基于大扭矩力矩 电机 的全数字 伺服驱动器 的控制 单元构成和功率电路设 计 ,其 中采用 F 82 D P作 为控制 芯 片。实际运行 结果 表 明,伺 服 系统 设计 合理 ,性 能可 2 1 S 靠 ,达到 了高性能 、高精度的要求 。
ZCLJA型力矩电机调速器使用说明

ZCLJA 型力矩电机调速器使用说明
一. 简述
本调速器是专为控制力矩电机而设计的一种新型的电子调压装置。
调速器采用可控硅控制、PID 控制系统实现电机无级调速,具有电压调节平稳、启动性能好、体积小、重量轻、安装维修方便等特点。
广泛应用于包装、印刷、纺织、塑料、造纸、冶金、电线电缆、拉丝等机械设备行业。
二. 主要技术指标
1.输出电压范围:AC50V ~370V
2.最大输出电流:1-6A
3.输出电压精度:>97%
4.三相输出不对称性:≤2%
5.显示方式: 0.56" 四位LED 数字显示
6.使用环境
环境温度:-10℃~+40℃
相对湿度:<90%。
三.外形尺寸及安装方式
安装方式:嵌入式安装。
调速器与其他装置之间水平方向至
少留有5cm 空间,垂直方向与其他部件至少有10cm 空间,以充
分散热。
四.使用方法和接线要求
图(2)为调速器面板。
四位数码管显示输出电压值,SET 旋钮调节输出,控制开关控制调速器的输出有或无。
图(3)为接线端子。
L1、L2、L3为三相AC380V 输入,U 、V 、W 为调速器输出,直接接力矩电机。
五.注意事项:
1.决不允许将380V 三相输入电压接三相输出U 、V 、W 端,接错会烧毁控制器;决不允许三相输人电压有缺相,否则会发生电机工作时异常。
2.主回路和控制回路接线时不允许端子松动。
本力矩调速器内部无熔断器、热继电器,用户必须自行安装。
W L2L3U V L1AC380V ( 输入 )
AC50V-370V ( 输出 )图<3>。
伺服电机设计方案

伺服电机设计方案1. 引言伺服电机是一种能够通过反馈信号来控制输出位置、速度或力矩的电机。
它广泛应用于机械、自动化、机器人等领域。
本文将介绍伺服电机的设计方案,从电机选型、控制系统设计以及应用注意事项等方面进行阐述。
2. 电机选型在进行伺服电机设计前,首先需要进行电机选型。
电机选型的关键是根据实际应用需求确定电机参数,例如额定功率、电压、转速范围等。
同时,还要考虑电机的尺寸、重量、使用环境和成本等因素。
常见的伺服电机类型包括直流伺服电机(DC Servo Motor)、步进伺服电机(Stepper Servo Motor)和交流伺服电机(AC Servo Motor)。
根据具体应用需求,选择合适的电机类型。
3. 控制系统设计伺服电机的控制系统设计是确保电机准确控制和稳定性的关键。
一个典型的伺服电机控制系统包括以下几个部分:3.1 反馈传感器反馈传感器用于感知电机的转动角度、速度和位置等信息,并将这些信息反馈给控制系统。
常用的反馈传感器包括编码器(Encoder)、霍尔传感器(Hall Sensor)和光电传感器(Photoelectric Sensor)。
选择合适的反馈传感器能够提高伺服电机的控制精度。
3.2 控制器控制器是伺服电机控制系统的核心部分,它负责接收来自反馈传感器的信号,并通过算法计算出反馈信号与设定值之间的误差,并产生控制信号输出给电机驱动器。
常见的控制器类型包括PID控制器、模糊控制器和自适应控制器。
选择合适的控制器能够保证伺服电机的稳定性和控制精度。
3.3 电机驱动器电机驱动器用于控制电机的运行,接收控制器发出的信号,并将其转换为合适的电流、电压或脉冲信号。
不同类型的伺服电机需要配备相应的电机驱动器。
在选购电机驱动器时,要考虑驱动器的功率范围、响应速度和保护功能等。
4. 应用注意事项设计伺服电机时,还需要注意以下几个方面:4.1 温度控制伺服电机在长时间运行中会产生热量,需要进行合理的散热设计,以避免过热对电机和控制系统的影响。
电机控制与调速实训装置
电机控制与调速实训装置1.引言1.1 概述概述部分是文章的引言部分,用于引出文章的主题和内容。
在本文中,概述部分将介绍电机控制与调速实训装置的背景和重要性。
电机控制与调速在现代工业中占据着至关重要的位置。
电机作为一种广泛应用的机电传动设备,广泛应用于工业生产的各个领域,如制造业、能源领域等。
在高效、精确和安全的控制电机运行方面,电机控制与调速技术起着不可或缺的作用。
随着现代科技的发展,对电机的需求不断增长,同时也对电机运行进行更精确的控制和调节。
电机的调速控制是电机控制领域中的一个重要研究方向,它能够通过调节电机的速度和转矩,实现对设备运行的精确控制,提高生产效率和质量。
为了培养和提高电机控制与调速的实际操作能力,设计和制造了电机控制与调速实训装置。
该实训装置旨在通过实际操作和实验,让学生系统地了解电机控制原理、掌握电机控制方法,并学习如何利用实训装置进行电机调速。
通过实验,学生不仅可以深入理解电机控制与调速的原理和方法,还可以培养动手实践和解决问题的能力。
本文将详细介绍电机控制与调速实训装置的设计原理和实验步骤,并探讨实训装置在教学中的有效性和对学习电机控制与调速的意义。
通过对实训装置的研究和探讨,希望能够进一步推动电机控制与调速技术的发展,并为相关领域的学习和研究提供有益的参考。
1.2 文章结构文章结构部分的内容应该包括对整篇长文的章节安排和各章节内容的概述。
在本篇长文中,文章结构分为引言、正文和结论三个部分。
引言部分包括概述、文章结构和目的三个小节,目的是为了引出本文要讨论的主题以及阐明撰写本文的目的。
正文部分包括电机控制和调速实训装置两个章节,主要围绕电机控制和调速的相关原理、方法、设计原理和实验步骤展开讨论。
具体而言,电机控制章节涵盖了电机控制的原理和控制方法,旨在介绍电机控制的基本概念和理论知识,使读者对电机控制有一个整体的了解。
调速实训装置章节主要介绍了调速实训装置的设计原理和实验步骤,着重介绍实训装置的具体组成、原理和实操步骤,帮助读者了解如何在实际操作中进行电机调速。
力矩电机智能化控制器设计
20 0 7年 8月刊 ( 总第 9 6期 J
大 众 科 技
DA ZHONG J KE I
20 8 0 7.
( u l i lN .6 C mu t ey o9 ) av
力矩 电机 智能化控 制器设计
杜 留锋 ,安金 梁,苗青林
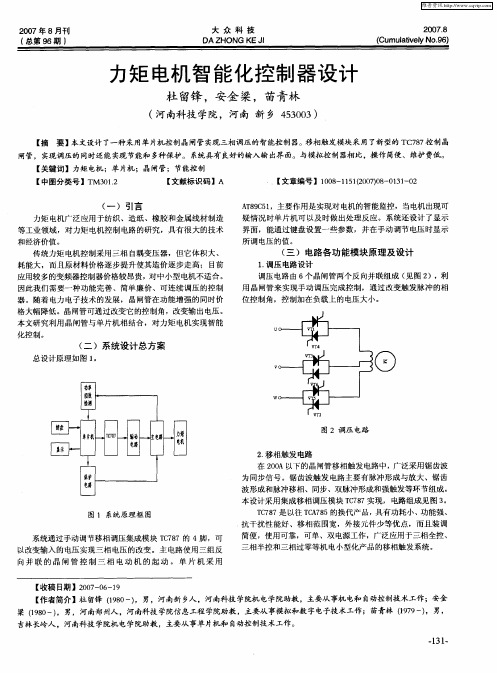
图 1 系统 原 理 框 图
T 7 7是 以往 T A 8 C8 C 7 5的换代产品,具有功耗小、 能强 、 功 抗干扰性能好 、移相 范围宽 ,外接元件少等优 点,而 且装调 简便,使 用可靠 ,可单 、双电源工作 ,广泛应用于 三相全控 、 三相半控和三相过零等 机电小型化产 品的移相触发系统 。
用 晶闸管来 实现手 动调压完成控制 ,通过改变触 发脉 冲的相
位控制 角,控制加在 负载上 的电压大小 。
( )系统设 计总 方案 二
总 设计 原 理 如 图 1 。
o
图 2 调 压 电路
2 移相触发 电路 . 在 20 0A以下的晶闸管移相触发 电路中 , 广泛采用锯齿波
为 同步信号 。锯 齿波触发 电路主要有脉冲形 成与放大、锯齿 波形成和脉冲移相、同步 、双脉冲形成和强触发等环节 组成 。 本设计采用集成移相调压模 块 T 7 7实现 ,电路组成见 图 3 C8 。
吉林 长岭人 ,河南科技 学院机 电学院助教 ,主要从事单 片机和 自动控制技术工作。
.
1 . 31
维普资讯
图 5 显 示 电路
5 系统 电路图 .
见图 6系统电路图。
图 3 77电路 组 成 图 TC 8
3 节能控制技术 .
电机效率是 电机输 出功率与输入功率 比值的百分数 。因
技 … 一…
起重机调压调速原理及操作简介
转矩,小于负载转矩,因此电机处于倒拉反转状态。和上升相同,系统也是处于闭 环控制状态,当主令开启全速档时,正向组晶闸管截止,反向组晶闸管导通,电机 迅速加速,当速度大于50%和75%时,分别切除两级转子电阻,系统进入开环状态。 电机的最终速度将略大于电机同步速度,此时处于再生发电状态。当主令回到调速 档时,两级转子电阻同时释放,反向组晶闸管截止,正向组晶闸管导通,系统重新 进入闭环控制。当主令回到零位时,和回到调速档一样,电机以反向转矩进行制动。 当电机速度接近零时,制动器制动,待制动器完全闭合后,电机才断电。反向转矩 制动减少了对制动器的磨损。
4
鞍山起重控制设备有限公司
ACC
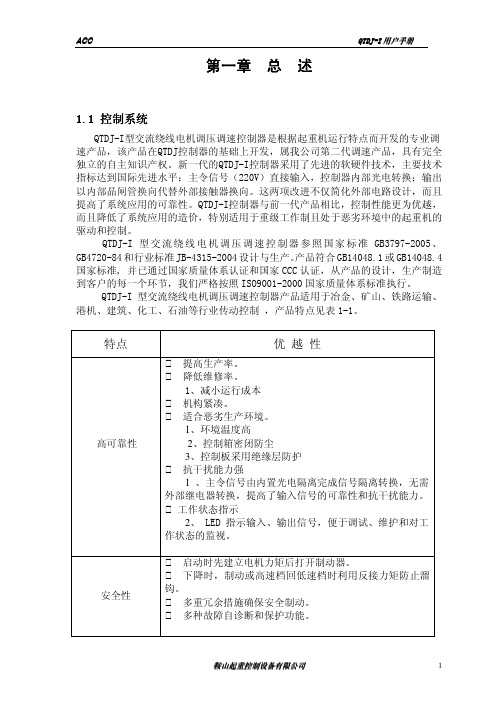
QTDJ-I 用户手册
1.4 技术指标
供电电源电压:3~AC380V 50Hz 电压允许变化范围:-20%~+10%。 控制电源电压:AC220V 50Hz 电压允许变化范围:-20%~+10%。 环境温度:-25℃~+60℃。 调速误差:≤5%。 转速变化率:≤5%。 均流系数:≥0.9。 耐振强度:5~13Hz,振幅1.5 ㎜,13~150Hz,加速度1g。 防护等级:控制单元IP51,晶闸管单元IP00(可根据用户要求提高防护 等级)。 主要保护功能 电源故障保护:电源错相、缺相、相不平衡、欠压保护(控制器自身 的欠电压保护,不能作为系统的欠电压保护)。 电机过载、短路、缺相和三相不平衡保护。 晶闸管过热保护。 无速度反馈保护。 无电流反馈保护。 上升失速保护(仅限升降型)。 下降超速保护(仅限升降型)。 电机堵转保护。
Vg
V
V
0
速度给定
PID 调节 移相触发 晶闸管
大力矩反作用飞轮转速控制设计

上海大学工程硕士过程控制及系统课程题目:大力矩反作用飞轮转速控制设计学生姓名:胡元闻学号:12610121专业:控制工程指导教师:孙鑫讲师大力矩反作用飞轮转速控制设计摘要本文是针对大力矩反作用飞轮转速控制系统进行的分析和设计,反作用飞轮作为动量交换元件,无论是工作在力矩模式还是工作在速率模式,都是通过转速变化来实现动量交换的,为了实现高精度的卫星姿态控制,必须要求飞轮能够实现转速稳定均匀。
所以本设计采用速度电流双闭环的控制系统,这样可以极大地减小反电势以及部分控制参数的不精确性对输出力矩的影响,解决零转速附近的摩擦力矩波动,来确保输出力矩的稳定性。
关键词:速度、电流环双闭环控制;飞轮转速、电机电流;转速控制;摘要 (1)引言 (3)一、飞轮调速系统 (3)1.1 系统工作原理 (3)1.2 系统反馈组成 (4)1.3 PID控制原理 (5)1.4 速度及电流双闭环控制 (6)1.5无负载情况下的调速系统运行 (7)二、系统控制策略 (9)2.1双闭环调节 (9)2.2换向控制 (11)2.3电流控制 (12)总结 (14)参考文献 (15)飞轮作为动量交换元件,无论是工作在力矩模式还是工作在速率模式,都是通过转速变化来实现动量交换的,为了实现高精度的卫星姿态控制,必须要求飞轮能够实现转速稳定均匀。
对于反作用飞轮来说,由于存在低速和转速过零问题,要在整个转速范围内实现转速控制的稳定均匀是十分困难的。
在高速段范围内要实现转速的高稳定性是很容易的,这时的转速测量较为容易,摩擦力较为均匀,因此控制也比较容易达到指标;但是在零转速附近要达到较高的转速稳定性就有困难。
问题来自两个方面,一个是测量问题,一个是控制问题。
测量问题可以通过选用在低速和高速工作都理想的转速测量方式来解决,而在零转速附近的控制问题来自经过零转速时的摩擦力波动,控制的实质在于对摩擦力的有效补偿,即对抗摩擦力干扰的能力要强。
由于摩擦力的非线性,要实现其有效补偿,在整个转速范围内采用单一结构的控制策略是很难达到理想的控制效果,因此在零转速及低速段附近必须采用抗摩擦力等非线性干扰因素能力强的先进的控制策略。
电机控制系统中的电机力矩闭环控制
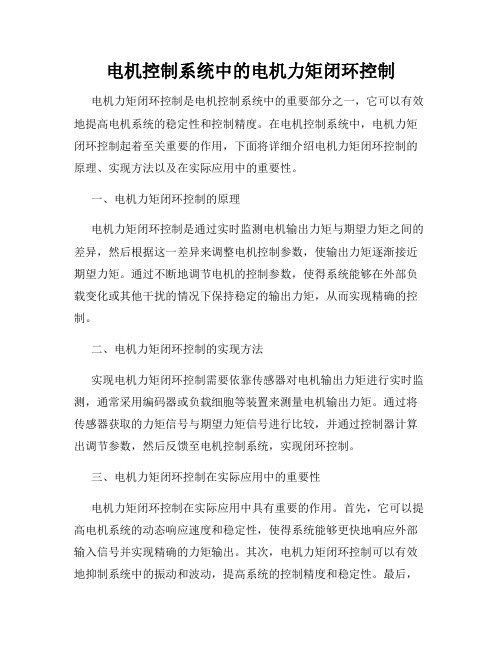
电机控制系统中的电机力矩闭环控制电机力矩闭环控制是电机控制系统中的重要部分之一,它可以有效地提高电机系统的稳定性和控制精度。
在电机控制系统中,电机力矩闭环控制起着至关重要的作用,下面将详细介绍电机力矩闭环控制的原理、实现方法以及在实际应用中的重要性。
一、电机力矩闭环控制的原理电机力矩闭环控制是通过实时监测电机输出力矩与期望力矩之间的差异,然后根据这一差异来调整电机控制参数,使输出力矩逐渐接近期望力矩。
通过不断地调节电机的控制参数,使得系统能够在外部负载变化或其他干扰的情况下保持稳定的输出力矩,从而实现精确的控制。
二、电机力矩闭环控制的实现方法实现电机力矩闭环控制需要依靠传感器对电机输出力矩进行实时监测,通常采用编码器或负载细胞等装置来测量电机输出力矩。
通过将传感器获取的力矩信号与期望力矩信号进行比较,并通过控制器计算出调节参数,然后反馈至电机控制系统,实现闭环控制。
三、电机力矩闭环控制在实际应用中的重要性电机力矩闭环控制在实际应用中具有重要的作用。
首先,它可以提高电机系统的动态响应速度和稳定性,使得系统能够更快地响应外部输入信号并实现精确的力矩输出。
其次,电机力矩闭环控制可以有效地抑制系统中的振动和波动,提高系统的控制精度和稳定性。
最后,电机力矩闭环控制还可以在电机运行过程中实时监测系统状态,帮助运维人员及时发现故障并采取相应措施,保证系统的正常运行。
综上所述,电机力矩闭环控制在电机控制系统中起着至关重要的作用,通过实时监测和调节电机输出力矩,可以提高系统的稳定性、控制精度和可靠性,是电机控制系统中不可或缺的一环。
在今后的电机控制系统设计和应用中,我们应该充分重视电机力矩闭环控制,并不断改进和优化控制算法,以满足不同应用场景对控制精度和稳定性的需求。
伺服电机力矩控制应用案例(3篇)

第1篇一、引言伺服电机作为一种高精度、高性能的电动机,广泛应用于工业自动化、机器人、数控机床等领域。
力矩控制是伺服电机应用中的关键技术之一,通过对伺服电机力矩的精确控制,可以实现各种复杂运动控制。
本文以某数控机床为例,介绍伺服电机力矩控制的应用案例。
二、案例背景某数控机床厂是一家专业生产数控机床的企业,其产品广泛应用于机械加工、汽车制造、航空航天等领域。
在产品研发过程中,客户对数控机床的加工精度、速度和稳定性提出了更高的要求。
为了满足客户需求,该厂决定采用伺服电机力矩控制技术来提升数控机床的性能。
三、伺服电机力矩控制方案1. 系统组成该数控机床伺服电机力矩控制系统主要由以下部分组成:(1)伺服电机:选用高性能伺服电机,具有高精度、高响应速度和宽调速范围等特点。
(2)伺服驱动器:选用高性能伺服驱动器,实现对伺服电机的精确控制。
(3)运动控制器:采用高性能运动控制器,实现对伺服电机的力矩控制。
(4)传感器:选用高精度力矩传感器,实时监测伺服电机力矩。
(5)上位机:采用工业控制计算机作为上位机,实现对整个系统的监控和调试。
2. 力矩控制策略(1)闭环控制:采用闭环控制策略,通过力矩传感器实时监测伺服电机力矩,并与设定值进行比较,根据误差值调整伺服电机输出力矩。
(2)PID控制:采用PID控制算法对伺服电机力矩进行调节,实现对力矩的精确控制。
(3)自适应控制:根据机床加工过程和负载变化,实时调整PID参数,提高系统鲁棒性。
四、应用效果1. 提高加工精度:通过伺服电机力矩控制,实现了对加工过程中切削力的精确控制,有效降低了加工误差,提高了加工精度。
2. 提高加工速度:伺服电机力矩控制使机床在加工过程中始终保持稳定的切削力,提高了加工速度。
3. 提高稳定性:伺服电机力矩控制使机床在加工过程中具有更好的稳定性,降低了机床振动和噪音。
4. 降低能耗:通过精确控制伺服电机力矩,实现了机床的节能降耗。
五、总结伺服电机力矩控制技术在数控机床中的应用,提高了机床的加工精度、速度和稳定性,降低了能耗,具有显著的经济效益和社会效益。
中空力矩电机
中空力矩电机
中空力矩电机是一种专门用于机械运动控制的设备,其特点是具
有中空设计,可以在轴向的同时实现径向控制,从而大大提高了机械
系统的精度和性能。
中空力矩电机的使用范围非常广泛,包括机床、
半导体制造、自动化生产线和医疗设备等领域。
中空力矩电机与传统电机相比,具有许多优势,比如其结构紧凑、密封性好、无摩擦磨损、转速高、响应速度快、控制精度高等等。
而且,中空力矩电机的设计非常灵活,可以根据不同的应用需求进行定制,并且可以与各种传感器、编码器和控制器等各种设备配合使用,
从而满足不同的控制要求。
中空力矩电机的基本原理是利用电磁学原理产生力矩,通过电磁
线圈和永磁体之间的相互作用,实现动力学控制。
该电机的电磁线圈
包裹在旋转部件外侧,而永磁体则内置于旋转部件内部,这种中空的
设计使得可以在电机的中心孔内放置大量的管道、传感器和控制器等
设备,充分利用了空间,解决了传统电机难以解决的问题。
中空力矩电机通常用于现代机械系统中的精密加工、高精度定位
和快速响应等领域,如数控机床、半导体制造、自动化生产线和医疗
设备等。
这些领域均对精度、速度和可靠性有较高要求,而中空力矩
电机作为一种高性能的控制器,能够有效的提高生产效率,降低生产
成本,提升产品质量。
总之,中空力矩电机是一种充满活力和创造性的机械控制设备。
其具备结构紧凑、控制精度高、转速快等特点,广泛应用于各种机械设备和自动化系统中,有效提高了生产效率和产品质量。
在未来的日子里,中空力矩电机将持续的创造性的应用于各种领域,并为人类的生产生活带来更多的便利和发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
设计(论文)专用纸力矩电机调速控制器的设计学校: 昆明理工大学学院: 应用技术学院姓名:专业班级:电子信息工程081指导教师单位: 应用技术学院指导教师姓名:仉月仙指导教师职称:讲师设计(论文)专用纸Torque motor speed controller designUniversity: Kunming University of Science and Technology Faculty: Faculty of Applied TechnologyName: Wu Wen YaProfessional class: Electronic Information Engineering 081 Faculty Adviser Unit: Faculty of Applied Technology Faculty Adviser Name: Zhang Yue XianProfessional Title: Lecturer设计(论文)专用纸目录摘要 (1)ABSTRACT (2)前言 (3)第一章绪论 (5)1.1力矩电机 (5)1.2调压调速 (6)1.3课题研究的背景及其意义 (7)1.4设计的主要目标任务 (7)第二章设计方案及其论证 (9)第三章系统硬件电路设计 (12)3.1电源模块设计 (12)3.1.1 电源的方案设计 (12)3.1.2 元器件的选择 (12)3.1.3 电源电路的电路图 (15)3.1.4 元器件明细表 (15)3.2主电路的模块设计 (16)3.2.1 主电路方案设计 (16)3.2.2 元器件的选择 (16)3.2.3 主电路电路图 (19)3.2.4 元器件明细表 (19)3.3控制电路部分设计 (20)3.3.1 控制电路方案设计 (20)3.3.2 控制电路元件的选择 (20)3.3.3 控制电路电路图 (30)3.3.4 元件明细表 (31)第四章调试与制作 (33)4.1制作过程 (33)4.2调试过程 (33)结论 (36)总结与体会 (37)谢辞 (39)设计(论文)专用纸参考文献 (40)附录一总电路图 (41)附录二总电路实物图 (42)附录3 外文资料及中文译文 (43)摘要力矩电动机,是一种具有软机械特性和宽调速范围的特种电机,具有低转速、大扭矩、过载能力强、响应快、特性线性度好、力矩波动小等特点。
力矩电动机的轴不是以恒功率输出动力而是以恒转矩输出动力。
力矩电机的特性使其适用于卷绕,开卷、堵转和调速等场合及其他用途,它广泛应用于机械制造、纺织、造纸、橡胶、塑料、金属线材和电线电缆等工业中。
而力矩电机的的调速方法以调压调速的方法为最佳的调速方法。
本课题是一种主回路用双向晶闸管,控制回路由运算放大器、集成触发器组成的调压调速控制器和三相力矩电机构成的调压调速系统。
关键词:调压调速三相力矩电机控制器AbstractTorque motor, with a soft mechanical properties and the wide speed range of special motor, with low rotation speed torque overload ability of fast response characteristics good linearity torque fluctuation characteristics of small torque motor shaft is not constant power output power but with constant torque output power.Torque motor of properties that make it apply to winding open book stall and speed regulation and so on and he USES, it is widely used in mechanical manufacturing textile paper rubber plastic metal wire and cable and other industryAnd the torque motor speed control method to pressure regulating speed method is the best control methodThis topic is a main circuit with two-way thyristor and control circuit by operational amplifier integration of trigger pressure regulating speed controller and three-phase torque motor consists of the surge speed regulation system.Key words:variable voltage control Three-phase torque motor controller前言力矩电机具有软机械特性和宽调速范围的特种电机,具有低转速、大扭矩、过载能力强、响应快、特性线性度好、力矩波动小等特点。
力矩电动机的轴不是以恒功率输出动力而是以恒转矩输出动力。
力矩电机的机械特性可以在现代伺服驱动装置的控制下实现较高的刚度,因此可以代替原来机械传动装置实现直接驱动。
目前已经有采用力矩电机为核心动力元件的数控回转工作台和数控摆角铣头等产品。
这些产品在体积功率比上还不如机械传动装置当,但由于其没有传动间隙,没有磨损,传动精度和效率高等优势,已经开始在精密装备上推广使用行。
堵转:在某些特殊场合中,有时要求电机在一段时间内保持一静止的力矩,如电缆收卷起始阶段须保持张紧;大型锻压机的锻件夹持装置等。
由于力矩电机的阻抗较大;其堵转电流较小,同时采用了强迫通风,所以能满足一定时间内的堵转要求。
允许堵转时间应按铭牌上标定值,如需较长的堵转时间,可选用较大的力矩电机,通过降低力矩电机的端电压来获得。
力矩电机还可根据其多种特点灵活应用,如本身具有直流串励电机特性,可部分代替直流电机使用;又如根据其转子具有高电阻特性,起动(堵转)转矩大,故可应用在启闭闸(阀)门以及阻力矩大的拖动系统中;也可利用其起动(堵转)转矩大,起动(堵转)电流小,实心转子的机械强度高的特点,而使用于频繁正、反转的装置或其他类似动作的各种机械上。
近年来,由于新型功率半导体器件、集成电路及微处理机的开发应用。
交流调速已取得新的进展。
目前对容量较大、要求较高的交流调速装置,大部分采用带微型机的控制系统,单为小型交流异步电动机提供结构简单、廉价、运行可靠的调速装置也是一个不容忽视的问题。
变频调速、矢量变换控制等系统能获得良好的调速性能,大多线路复杂、成本高、维护不变;串级调速只适用于线绕式异步电动机,在一定程度上影响了它的推广。
交流调压调速系统基本上没有以上缺点,在要求不太高的场合能满足调速需要。
本课题就是一种主回路采用三只双向晶闸管,控制回路有集成芯片构成的调压调速线路。
第一章绪论1.1 力矩电机力矩电机的特点是具有软的机械特性,可以堵转。
当负载转矩增大时能自动降低转速,同时加大输出转矩。
当负载转矩为一定值时改变电机端电压便可调速。
但转速的调整率不好!因而在电机轴上加一测速装置,配上控制器。
利用测速装置输出的电压和控制器给定的电压相比,来自动调节电机的端电压.使电机稳定!具有低转速、大扭矩、过载能力强、响应快、特性线性度好、力矩波动小等特点,可直接驱动负载省去减速传动齿轮,从而提高了系统的运行精度。
为取得不同性能指标,该电机有小气隙、中气隙、大气隙三种不同结构形式,小气隙结构,可以满足一般使用精度要求,优点是成本较低;大气隙结构,由于气隙增大,消除了齿槽效应,减小了力矩波动,基本消除了磁阻的非线性变化,电机线性度更好,电磁气隙加大,电枢电感小,电气时间常数小,但是制造成本偏高;中气隙结构,其性能指标略低于大气隙结构电机,但远高于小气隙结构电机,而体积小于大气隙结构电机,制造成本低于大气隙结构电机。
力矩电动机输出低转速、大力矩的伺服电动机。
为了省去或简化机械变速机构,往往在驱动控制系统中采用力矩电动机来驱动机械负载。
力矩电动机反应速度快,转速波动小,能在高转矩低转速下稳定运行,机械特性和调节特性线性度好,具有高耦合刚度。
因此,它特别适合于在位置控制系统和宽调速系统中作执行元件,也适用于需要大转矩、低速、转速调节、转速反馈和需要一定张力的场合。
根据所用电源,力矩电动机可分为直流力矩电动机和交流力矩电动机。
直流力矩电动机一种特殊形式的直流伺服电动机。
大多采用永磁励磁。
其基本要求与直流伺服电动机相似。
为了获得大的输出转矩和低的转速,一般作成扁平结构。
电机电枢铁心长度和外径之比很小。
为了使电机工作稳定,电机的输出转矩不能超过最大堵转转矩。
后者又称峰值堵转转矩。
与峰值堵转转矩相应的电枢电流称为峰值堵转电流。
如果电枢电流超过峰值堵转电流,电机便去磁,需要重新充磁才能正常工作。
为了减小转矩和转速的脉动,定子采用多对磁极,电枢选用较多的槽数、换向片数和串联导体数。
力矩波动△M表示电枢处于不同位置时的输出力矩的变化。
连续堵转转矩直流力矩电动机采用大内孔扁平结构,有利于电机直接套在负载轴上,提高系统的耦合刚度,使系统反应迅速,频带展宽,稳定工作,满足动态要求。
电机常数KL是力矩电动机的一个重要指标,它表示峰值堵转转矩与输入峰值堵转功率平方根之比,(千克力米/瓦1/2)。
KL既反映了电机本身的利用率,又考虑到电机所消耗的功率。
交流力矩发动机主要运行在大负载、低转速状态,也可短期或长期运行在堵转状态,其速度控制主要通过测速电机速度反馈和控制张力大小二种方法来实现。
交流力矩发动机目前已广泛用于电影胶片冲洗、轻工化纤、纺织、电缆、塑料及造纸等卷绕装置中。
力矩电机广泛应用于机械制造、纺织、造纸、橡胶、塑料、金属线材和电线电缆等工业中。
1.2 调压调速调压调速是异步电动机调速系统中比较简单的一种。
由电机原理可知,当转差率S基本不变时,电动机的电磁转矩与定子电压的平方成正比,因此,改变定子电压就可以得到不同的人为机械特性,从而达到调节电机转速的目的。
近年来,随着电力电子技术的发展多用双向晶闸管来实现交流调压。
双向晶闸管调压的触发控制方法有两种:一种是相控技术,通过改变晶闸管的触发相位改变电压输出波形以实现调压。
采用相位控制技术的问题在于其输出电压所含谐波分量比较大。