ARM汇编STM32F103VE串口中断发送接收
单片机串口发送中断

单片机串口发送中断
从硬件角度来看,单片机串口发送中断通常是由串口控制器内
部的发送缓冲寄存器为空触发的。
当发送缓冲寄存器为空时,串口
控制器会产生一个中断请求,通知处理器发送操作已经完成。
处理
器在接收到这个中断请求后,会暂停当前任务,执行串口发送中断
服务程序,完成相关的发送完成操作,然后继续执行之前的任务。
从软件角度来看,处理器在接收到串口发送中断请求后,需要
执行相应的中断服务程序来处理发送完成事件。
在中断服务程序中,通常会进行一些清除中断标志、发送下一个数据、更新发送计数器
等操作,以确保串口发送的连续性和正确性。
在实际的应用中,我们需要合理设置串口发送中断的优先级,
确保及时响应发送完成事件,同时不影响其他重要的任务。
另外,
还需要注意处理器在中断服务程序中的执行时间,避免影响实时性
要求较高的系统。
总的来说,单片机串口发送中断是一种有效的处理发送完成事
件的机制,能够提高系统的实时性和并发性。
在使用时,需要充分
理解其工作原理,合理设置中断优先级,编写高效的中断服务程序,以确保系统的稳定性和可靠性。
stm32f103,串口收发的原理

STM32F103的串口收发原理基于串行通信协议。
串行通信是一种数据传输方式,数据在两个设备之间逐位传输。
在STM32F103中,串口(USART)模块用于实现串行通信。
串口收发的原理可以分为以下几个步骤:
1.初始化串口:在开始串行通信之前,需要配置串口的参数,如波特率、数据位、停止位、校验位
等。
这些参数可以根据需要进行设置,以匹配通信设备的规格和协议要求。
2.发送数据:当需要发送数据时,STM32F103会将数据写入串口的发送缓冲区。
然后,串口模
块会自动将数据一位一位地发送出去。
发送数据的顺序是从低位到高位依次发送。
3.接收数据:接收数据的过程与发送数据相反。
当接收到数据时,串口模块会将数据一位一位地读
取,并存储在接收缓冲区中。
然后,STM32F103可以从接收缓冲区中读取数据。
同样地,接收数据的
顺序也是从低位到高位依次读取。
4.错误检测与处理:为了确保数据的正确传输,可以在通信过程中加入校验和(checksum)或奇
偶校验(parity)等错误检测机制。
在接收数据时,接收方可以计算校验和或奇偶校验,并与发送方的数
据进行比较。
如果发现错误,可以请求重新发送数据。
需要注意的是,具体的串口配置和操作可能会根据不同的STM32系列和型号有所不同。
因此,在实际应用中,建议参考相关文档和参考手册,以了解特定型号的STM32的串口配置和操作方法。
stm32串口通信死在接收中断中的解决方法

stm32串⼝通信死在接收中断中的解决⽅法现象: 使⽤stm32f0xx系列的芯⽚,串⼝1使⽤接收中断时,当接收到⼀个数据时死在串⼝中断中,发⽣了串⼝中断溢出。
原因解释:在使⽤⼀个串⼝发数据的传感器过程中,发现程序第⼀次进⼊串⼝中断之后不再执⾏主函数的内容,中断中的内容也不执⾏。
查询⼤量资料后发现:串⼝在接收数据过多时,会出现串⼝溢出错误,并进⼊溢出中断(ORE中断)。
接下来是错误产⽣原因以及解决⽅法。
(1)什么是ORE中断?为什么会产⽣?产⽣原因如上所述。
ORE标志位在USART_SR寄存器,但值得注意的是,当我们打开串⼝接收中断时,同时也就打开了ORE中断。
(2)如何解决?看了上⾯的资料之后,我知道程序是死在了串⼝溢出中断。
处理中断时,我⾸先想到的是清除这个中断标志位,但是遇到了很多⿇烦。
解决⽅法: void USART1_IRQHandler(void){ /* 加⼊清除标志位,否则会卡死在串⼝中断服务函数中 */ uint8_t ucTemp; if(USART_GetITStatus(DEBUG_USARTx,USART_IT_RXNE)!=RESET) //检查 USART 是否发⽣中断 { USART_ClearITPendingBit(DEBUG_USARTx,USART_IT_RXNE); // 清中断标志 ucTemp=USART_ReceiveData(DEBUG_USARTx); } if(USART_GetFlagStatus(DEBUG_USARTx,USART_FLAG_ORE) == SET) // 检查 ORE 标志 { USART_ClearFlag(DEBUG_USARTx,USART_FLAG_ORE); USART_ReceiveData(DEBUG_USARTx); }}。
stm32多任务多数据串口接收及处理方法
stm32多任务多数据串口接收及处理方法STM32多任务多数据串口接收及处理方法通常涉及到使用中断服务程序(ISR)或轮询方法来接收串口数据,并在多个任务之间分配和同步处理这些数据。
以下是一个基本的步骤和策略,用于实现这一功能:1. 初始化串口:首先,你需要初始化串口以进行通信。
这包括设置波特率、数据位、停止位、奇偶校验等。
2. 配置中断:STM32的串口通常具有一个接收中断。
你可以配置这个中断,以便每当一个新的字节被接收时,它就会触发一个中断。
3. 中断服务程序(ISR):在中断服务程序中,你可以读取接收缓冲区中的数据,并将其放入一个全局变量或数据结构中,以便其他任务或函数可以访问它。
4. 多任务处理:你可以使用一个任务或一组任务来处理这些串口数据。
这可能涉及到解析数据、执行某些操作或将数据发送到其他设备。
5. 数据同步:在多任务环境中,你需要确保数据的同步。
这意味着,当一个任务正在处理数据时,其他任务不能同时访问或修改这些数据。
这通常通过使用互斥锁、条件变量或其他同步机制来实现。
6. 轮询:除了使用中断,你还可以使用轮询方法来检查串口是否有数据可供读取。
这种方法可能在某些应用中更简单,但可能不如中断方法效率高。
7. 错误处理:不要忘记在代码中包含错误处理逻辑。
这可能包括检查读取的数据是否完整、是否有任何传输错误等。
8. 优化:对于高性能应用,你可能还需要考虑其他优化策略,如非阻塞读取、缓冲区管理、流量控制等。
以上只是一个基本的框架,具体的实现细节将取决于你的具体需求和STM32的具体型号。
建议查阅STM32的参考手册和相关文档以获取更详细的信息和示例代码。
stm32 hal库 串口中断接收函数
stm32 hal库串口中断接收函数在STM32开发中,使用串口通信是很常见的一种方式。
而在使用STM32 HAL库进行开发时,我们可以方便地使用HAL库提供的接口来进行串口通信。
其中,使用串口中断接收数据可以提高数据的实时性和稳定性,因此本文将介绍STM32 HAL库中串口中断接收函数的使用方法。
1. 串口中断接收函数的定义首先,我们需要了解一下STM32 HAL库中串口中断接收函数的定义。
在HAL库中,串口中断接收函数的定义如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) 该函数是由HAL库提供的一个回调函数,即当串口接收到数据后,会自动调用该函数。
其中,参数huart是串口句柄,用于标识当前是哪个串口接收到了数据。
2. 串口中断接收函数的使用方法在使用串口中断接收函数时,我们需要按照以下步骤进行操作:(1)使能串口中断在使用串口中断接收函数之前,我们需要先使能串口中断。
具体地,可以使用HAL库提供的函数HAL_UART_Receive_IT()来使能串口中断,代码如下:HAL_UART_Receive_IT(&huart1, uart1_rx_data, 1);其中,第一个参数是串口句柄,第二个参数是接收缓存区,第三个参数是接收数据的长度。
(2)编写串口中断接收函数接下来,我们需要编写串口中断接收函数。
在该函数中,我们可以对接收到的数据进行处理。
例如,将接收到的数据存储到一个全局变量中,代码如下:void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {if(huart == &huart1){uart1_rx_buf[uart1_rx_len++] = uart1_rx_data[0];}}在该函数中,我们首先通过判断huart参数来确定是哪个串口接收到了数据,然后将接收到的数据存储到全局变量uart1_rx_buf中,并将接收数据的长度uart1_rx_len自增1。
stm32hal库串口中断接收函数
stm32hal库串口中断接收函数STM32 HAL库提供了一种简单可靠的方式实现串口通信,其中使用中断接收函数自动接收字节流数据。
串口接收中断函数需要在初始化时开启,同时设置串口中断接收缓冲区大小,并在主程序中调用相关的中断处理函数。
中断接收函数的基本原理是:每当收到一个字节时,串口硬件会触发一个中断,并将接收到的字节存入中断接收缓冲区。
当有数据到达时,中断接收处理器会检测是否有可用的数据,并将数据读取到应用程序中。
以下是STM32 HAL库串口中断接收函数的代码示例:```c/* 串口中断接收处理函数 */void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {/* 判断是否发生串口中断 */if (huart->Instance == USARTx) {/* 读取缓冲区中的字节 */rx_buffer[rx_index] = (uint8_t)(huart->Instance->RDR &0xFF);/* 增加接收缓存区的索引 */rx_index++;/* 如果接收数据超过了缓存区大小,则清除缓存区 */if (rx_index == BUFFER_SIZE) {rx_index = 0;}/* 开始下一次中断接收 */HAL_UART_Receive_IT(huart, &rx_buffer[rx_index], 1);}}```在主程序中,我们需要开启串口中断接收并设置接收缓冲区大小:```c/* 开启串口中断接收 */HAL_UART_Receive_IT(&huart1, &rx_buffer[rx_index], 1);/* 设置接收缓冲区大小 */#define BUFFER_SIZE 1024uint8_t rx_buffer[BUFFER_SIZE];uint16_t rx_index = 0;```这样,在主程序中循环读取缓冲区的数据即可。
stm32f103 (标准库)部分例程

stm32f103(标准库)部分例程一、概述stm32f103是一款高性能的32位ARMCortex-M3微控制器,广泛应用于各种嵌入式系统。
本部分例程将介绍如何在STM32标准库中进行一些常见操作,如初始化、中断处理、串口通信等。
二、初始化1.系统时钟设置:通过STM32标准库提供的函数,可以快速设置系统时钟,包括HSI、HSE、PLL等。
2.外设初始化:根据需要,对GPIO、USART、SPI等外设进行初始化。
三、中断处理1.外部中断:通过配置中断优先级和中断向量,实现对外部中断的处理。
2.定时器中断:使用定时器中断,可以实现定时功能,如定时计数、定时延时等。
四、串口通信1.串口初始化:配置串口参数,如波特率、数据位、校验位等。
2.串口发送和接收:通过使用STM32标准库提供的函数,可以实现串口的发送和接收操作。
以下是一个简单的示例程序,用于演示如何使用STM32标准库进行串口通信:```c#include"stm32f10x.h"#include"stm32f10x_gpio.h"#include"stm32f10x_rcc.h"#include"stm32f10x_usart.h"voidUSART1_Init(void){//初始化USART1外设RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);USART_InitTypeDefUSART_InitStruct={0};USART_ART_BaudRate=9600;//设置波特率为9600USART_ART_WordLength=USART_WordLength_8b;//数据位为8位USART_ART_StopBits=USART_StopBits_1;//停止位为1个USART_ART_Parity=USART_Parity_No;//无校验位USART_ART_HardwareFlowControl=USART_HardwareFlowContro l_None;//不使用硬件流控制USART_ART_Mode=USART_Mode_Rx|USART_Mode_Tx;//设置为接收和发送模式USART_Init(USART1,&USART_InitStruct);//初始化USART1外设}voidUSART1_SendData(uint8_tdata){//发送数据到USART1外设USART_SendData(USART1,data);}intmain(void){//初始化GPIO和RCC外设,设置USART1外设时钟等...USART1_Init();while(1){//从USART1接收数据...uint8_treceivedData=USART_ReceiveData(USART1);//接收数据并存储到receivedData变量中...//处理接收到的数据...//发送数据到USART1...USART1_SendData(receivedData);//将处理后的数据发送回USART1外设...}}```以上是一个简单的串口通信示例程序,可以通过STM32标准库提供的函数来实现串口的发送和接收操作。
STM32-实现串口中断接收和发送数据

STM32-实现串⼝中断接收和发送数据⼀、⼯具 1、硬件:STM32L053R8单⽚机(HAL库) 2、编译环境:Atollic TrueSTUDIO for STM32 9.3.0 3、辅助⼯具:STM32CubeMX⼆、单⽚机系统时钟配置 1、系统时钟配置(没有显⽰的默认),这⾥选择的是内部的⾼速时钟(HSI)作为时钟源,系统时钟频率配置到24MHz。
三、串⼝配置 1、选⽤的是串⼝1,模式是异步通讯,波特率为38400,数据位长度为8,⽆校验位,⼀个停⽌位,接收和发送都打开,其它默认。
2、使能串⼝中断四、⽣成⼯程并进⾏完善 1、⼯程⽣成设置 2、完善代码 在配置完串⼝后,要以中断的⽅式接收数据,后⾯新增的接收⼀个字节数据函数主要是为了打开串⼝中断并等待有数据发来,剩下的字节由中断的回调函数控制接收。
/*** @brief USART1 Initialization Function* @param None* @retval None*/static void MX_USART1_UART_Init(void){/* USER CODE BEGIN USART1_Init 0 *//* USER CODE END USART1_Init 0 *//* USER CODE BEGIN USART1_Init 1 *//* USER CODE END USART1_Init 1 */huart1.Instance = USART1;huart1.Init.BaudRate = 38400 ;huart1.Init.WordLength = UART_WORDLENGTH_8B;huart1.Init.StopBits = UART_STOPBITS_1;huart1.Init.Parity = UART_PARITY_NONE;huart1.Init.Mode = UART_MODE_TX_RX;huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart1.Init.OverSampling = UART_OVERSAMPLING_16;huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart1) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART1_Init 2 */HAL_UART_Receive_IT(&huart1, &r_data, 1);/* USER CODE END USART1_Init 2 */} 当有数据发来,会响应中断接收数据,接收完后会关闭中断然后调⽤⼀个回调函数,如果想接收多个数据,就需要在回调函数中重新开启接收中断,回调函数的内容可以由⽤户⾃⼰添加(该函数名为固定写法不能随意更改)。
stm32串口中断接收的长度计算

stm32串口中断接收的长度计算
在STM32中,串口接收数据时,可以通过中断来实现数据的接收。
在串口中断接收数据时,需要计算接收到的数据的长度,一般
可以通过以下几种方法来实现:
1. 使用缓冲区计数,在串口中断服务程序中,每当接收到一个
数据时,可以将数据存储到一个缓冲区中,并且使用一个变量来记
录已经接收到的数据的长度。
这样可以通过计算缓冲区中的数据长
度来得到接收到的数据的长度。
2. 使用帧头帧尾,如果串口通信的数据是按照帧格式进行传输的,那么可以在接收数据时,通过检测帧头和帧尾来计算接收到的
数据的长度。
当接收到帧头时开始计数,当接收到帧尾时结束计数,这样得到的长度就是接收到的数据的长度。
3. 使用超时计数,在串口中断服务程序中,可以设置一个超时
计数器,当开始接收数据时,启动计数器,当一定时间内没有接收
到数据时,停止计数器,并将计数值作为接收到的数据的长度。
总的来说,串口中断接收数据的长度计算可以根据具体的应用
场景来选择合适的方法,一般需要根据实际情况进行调试和优化。
希望以上信息能对你有所帮助。
STM32F103CAN收发问题_接收中断无法进入_201608190
STM32F103XX CAN收发问题——接收中断无法进入Author:lu.hongboDate:2016-08-19内容不多,点到即止。
相信很多人买过一个STM32F103类型的开发板,例如“红牛开发板”这个开发板所提供的例程有很多。
但是有问题的例程也很多。
这里我就简单介绍一个问题例程——CAN收发。
CAN总体说来还是挺复杂的,然而复杂的不是应用。
而是控制器设计,不过这已经在STM32F103类型的芯片中集成了。
用的时候,越简单越好。
STM32也提供了外设库文件。
我就单说说这个<【12】红牛板_CAN (2013.7.31)>例程。
首先,可以肯定的说——这个例程有问题。
1、CAN端口复用的时候没有使用GPIO映射函数——对于使用PB8/PB9进行通信的用户一定很苦恼,为啥例程不能直接运行。
注意这个GPIO映射函数——GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalStateNewState)需要在CAN端口配置的时候调用。
2、请注意对应GPIO组的时钟是不是开启了,因为时钟如果没开,配置将无效3、请注意一个叫做AFIO的模块是不是开启时钟了,如果没有开启,端口影射将会无效4、在有需要注意的就是中断向量表,__Vectors DCD __initial_sp ; Top of StackDCD Reset_Handler ; Reset HandlerDCD NMI_Handler ; NMI HandlerDCD HardFault_Handler ; Hard Fault HandlerDCD MemManage_Handler ; MPU Fault HandlerDCD BusFault_Handler ; Bus Fault HandlerDCD UsageFault_Handler ; Usage Fault HandlerDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD SVC_Handler ; SVCall HandlerDCD DebugMon_Handler ; Debug Monitor HandlerDCD 0 ; ReservedDCD PendSV_Handler ; PendSV HandlerDCD SysTick_Handler ; SysTick Handler; External InterruptsDCD WWDG_IRQHandler ; Window WatchdogDCD PVD_IRQHandler ; PVD through EXTI Line detectDCD TAMPER_IRQHandler ; TamperDCD RTC_IRQHandler ; RTCDCD RCC_IRQHandler ; RCCDCD EXTI0_IRQHandler ; EXTI Line 0DCD EXTI1_IRQHandler ; EXTI Line 1DCD EXTI2_IRQHandler ; EXTI Line 2DCD EXTI3_IRQHandler ; EXTI Line 3DCD EXTI4_IRQHandler ; EXTI Line 4DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7DCD ADC1_2_IRQHandler ; ADC1 & ADC2DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0 DCD CAN1_RX1_IRQHandler ; CAN1 RX1DCD CAN1_SCE_IRQHandler ; CAN1 SCEDCD EXTI9_5_IRQHandler ; EXTI Line 9..5DCD TIM1_BRK_IRQHandler ; TIM1 BreakDCD TIM1_UP_IRQHandler ; TIM1 UpdateDCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation DCD TIM1_CC_IRQHandler ; TIM1 Capture CompareDCD TIM2_IRQHandler ; TIM2DCD TIM3_IRQHandler ; TIM3DCD TIM4_IRQHandler ; TIM4DCD I2C1_EV_IRQHandler ; I2C1 EventDCD I2C1_ER_IRQHandler ; I2C1 ErrorDCD I2C2_EV_IRQHandler ; I2C2 EventDCD I2C2_ER_IRQHandler ; I2C2 ErrorDCD SPI1_IRQHandler ; SPI1DCD SPI2_IRQHandler ; SPI2DCD USART1_IRQHandler ; USART1DCD USART2_IRQHandler ; USART2DCD USART3_IRQHandler ; USART3DCD EXTI15_10_IRQHandler ; EXTI Line 15..10DCD RTCAlarm_IRQHandler ; RTC Alarm through EXTI Line DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend DCD TIM8_BRK_IRQHandler ; TIM8 BreakDCD TIM8_UP_IRQHandler ; TIM8 UpdateDCD TIM8_TRG_COM_IRQHandler ; TIM8 Trigger and Commutation DCD TIM8_CC_IRQHandler ; TIM8 Capture CompareDCD ADC3_IRQHandler ; ADC3DCD SDIO_IRQHandler ; SDIODCD TIM5_IRQHandler ; TIM5DCD SPI3_IRQHandler ; SPI3DCD UART4_IRQHandler ; UART4DCD UART5_IRQHandler ; UART5DCD TIM6_IRQHandler ; TIM6DCD TIM7_IRQHandler ; TIM7DCD DMA2_Channel1_IRQHandler ; DMA2 Channel1DCD DMA2_Channel2_IRQHandler ; DMA2 Channel2DCD DMA2_Channel3_IRQHandler ; DMA2 Channel3DCD DMA2_Channel4_5_IRQHandler ; DMA2 Channel4 & Channel5如下中断向量表的名字是不是和你的中断函数名相同。
串口中断处理函数接收和发送
串口中断处理函数接收和发送
串口中断处理函数是一种常用的数据通讯方式,它可以在不占用CPU 时间的情况下实现数据的接收和发送。
在使用串口中断处理函数时,需要注意以下几点:
1. 接收数据:在串口接收数据时,中断处理函数可以通过读取
数据寄存器获取接收到的数据。
接收到的数据可以直接存储在缓冲区中,或者经过处理后再存储。
2. 发送数据:在串口发送数据时,中断处理函数可以通过写入
数据寄存器将数据发送出去。
发送数据时需要注意数据的格式和长度,避免出现数据丢失或接收端无法识别的情况。
3. 中断优先级:在使用多个中断时,需要设置不同的中断优先级,以确保高优先级的中断能够及时响应。
在串口通讯中,接收中断的优先级应该高于发送中断的优先级,以确保接收到的数据能够及时处理。
4. 缓冲区管理:在串口通讯中,需要使用缓冲区来存储接收和
发送的数据。
需要注意缓冲区的大小和数据的读写顺序,避免出现缓冲区溢出或数据丢失的情况。
总之,串口中断处理函数是一种非常实用的通讯方式,可以提高数据传输的效率和稳定性。
在使用中需要注意以上几点,以确保数据的正确接收和发送。
- 1 -。
stm32串口中断原理

stm32串口中断原理
STM32串口中断是指在串口收发数据时,通过中断方式进行
数据的处理和传输。
在STM32单片机中,串口通信是通过UART或USART模块实现的。
UART(Universal Asynchronous Receiver/Transmitter)是一种
通用异步收发器,主要用于串行通信。
USART(Universal Synchronous/Asynchronous Receiver/Transmitter)是一个更加
通用且功能更强大的串行通信接口,可同时支持异步和同步通信。
在STM32中,串口通信一般使用USART模块。
通过配置USART的寄存器,设置波特率、数据位、停止位、校验位等
参数。
然后,通过使能USART接收中断和发送中断,可以实
现接收和发送数据时的中断处理。
当有新的数据要发送时,CPU会将数据写入USART的发送缓冲区,并启动发送操作。
当发送操作完成后,USART会触发
发送完成中断,通知CPU可以继续发送下一个数据。
当收到新的数据时,USART会将数据存入接收缓冲区,并触
发接收完成中断,通知CPU可以读取接收到的数据。
在中断服务函数中,我们可以根据需要处理发送和接收的数据。
比如,可以通过发送中断函数来发送下一个数据,或者在接收中断函数中进行数据的处理和分析。
总的来说,STM32串口中断通过配置USART的相关寄存器和使能中断,实现了在数据收发过程中的中断处理。
这种方式可以提高效率和可靠性,使程序可以及时响应串口数据的变化。
使用STM32CubeMX实现中断模式下的串口收发

单击 UART 按钮弹出设置窗口。
Baud Rate :波特率:此后生成的初始化程序会对波特率和 APB 总线频率进行自动换算。 Word Length:字长
Parity:校验位 Stop Bits:停止位 Data Direction:设置发送接收模式 Over Sampling:对接收信号的采样倍率。如果软件模拟串口一般 3 次采样/位就够了,这里 默认即可。
C)串口接收的实现方法 在 main.c 的 while(1)前执行
if(HAL_UART_Receive_IT(&huart5,aRxBuffer,1)!=HAL_OK)Error_Handler();开启接收中 断,准备接收。
在 main.c 中重写串口接收回调函数如下: void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle) {
Uart5Ready_R = SET; Rx_Num_UART5 = ++Rx_count_UART5; Rx_count_UART5 = 0; } else Rx_count_UART5++; HAL_UART_Receive_IT(&huart5,aRxBuffer,1); //开启下一次接收中断 } } 在此回调函数中,每次接收到的字节 aRxBuffer[0]都会存入 Rxbuff[ ] ,Rx_count_UART5 自动加 1。结束字节为 0x0D 0x0A。一组字节接收结束后,Uart5Ready_R 将赋值为 SET, 接收字节数保存在 Rx_Num_UART5。 因为在调用 HAL_UART_IRQHandler(&huart5);时,调用了 UART_Receive_IT(),其中 执行了 __HAL_UART_DISABLE_IT(huart, UART_IT_RXNE),所以接收中断必须在回调函 数中重新开启,最简单的就是重复调用 HAL_UART_Receive_IT(&huart5,aRxBuffer,1)了。
STM32串口中断接受数据教程

STM32串口中断接受数据教程在STM32系列微控制器中,使用串口接收数据可以通过中断方式实现,这种方式对于实时性要求较高的应用非常有用。
本教程将介绍如何在STM32中配置串口接收中断,并编写相应的中断服务程序来处理接收到的数据。
首先,我们需要初始化串口硬件和中断。
在STM32CubeIDE中,可以使用CubeMX来生成初始化代码。
在"Pinout & Configuration"选项卡中,选择所需的串口引脚,并设置相应的参数(如波特率、数据位、停止位等)。
然后,在"Configuration"选项卡中,启用串口的中断功能。
接下来,需要在代码中创建串口接收中断的回调函数。
在CubeMX生成的代码中,可以找到一个名为"USARTx_IRQHandler"的函数,其中"x"是串口的编号。
在这个函数中,可以添加处理接收数据的代码。
在回调函数中,可以使用HAL库提供的函数来判断是否接收到了新的数据。
例如,可以使用"__HAL_UART_GET_FLAG"函数来检查接收寄存器非空标志位,并使用"__HAL_UART_CLEAR_FLAG"函数清除该标志位。
然后,可以使用"__HAL_UART_GET_IT_SOURCE"函数来检查是否使能了接收中断。
如果使能了接收中断且接收寄存器非空,可以使用"__HAL_UART_CLEAR_IT"函数清除接收中断标志位,并使用"HAL_UART_RxCpltCallback"函数来处理接收到的数据。
在回调函数中,可以通过使用"HAL_UART_Receive_IT"函数来继续接收更多的数据。
此函数可以在接收完成后自动调用回调函数,以便连续接收数据。
在主函数中,可以使用"HAL_UART_Receive_IT"函数启动接收数据。
STM32F103CAN收发问题_接收中断无法进入_201608190
STM32F103XX CAN收发问题——接收中断无法进入Author:lu.hongboDate:2016-08-19内容不多,点到即止。
相信很多人买过一个STM32F103类型的开发板,例如“红牛开发板”这个开发板所提供的例程有很多。
但是有问题的例程也很多。
这里我就简单介绍一个问题例程——CAN收发。
CAN总体说来还是挺复杂的,然而复杂的不是应用。
而是控制器设计,不过这已经在STM32F103类型的芯片中集成了。
用的时候,越简单越好。
STM32也提供了外设库文件。
我就单说说这个<【12】红牛板_CAN (2013.7.31)>例程。
首先,可以肯定的说——这个例程有问题。
1、CAN端口复用的时候没有使用GPIO映射函数——对于使用PB8/PB9进行通信的用户一定很苦恼,为啥例程不能直接运行。
注意这个GPIO映射函数——GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalStateNewState)需要在CAN端口配置的时候调用。
2、请注意对应GPIO组的时钟是不是开启了,因为时钟如果没开,配置将无效3、请注意一个叫做AFIO的模块是不是开启时钟了,如果没有开启,端口影射将会无效4、在有需要注意的就是中断向量表,__Vectors DCD __initial_sp ; Top of StackDCD Reset_Handler ; Reset HandlerDCD NMI_Handler ; NMI HandlerDCD HardFault_Handler ; Hard Fault HandlerDCD MemManage_Handler ; MPU Fault HandlerDCD BusFault_Handler ; Bus Fault HandlerDCD UsageFault_Handler ; Usage Fault HandlerDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD 0 ; ReservedDCD SVC_Handler ; SVCall HandlerDCD DebugMon_Handler ; Debug Monitor HandlerDCD 0 ; ReservedDCD PendSV_Handler ; PendSV HandlerDCD SysTick_Handler ; SysTick Handler; External InterruptsDCD WWDG_IRQHandler ; Window WatchdogDCD PVD_IRQHandler ; PVD through EXTI Line detectDCD TAMPER_IRQHandler ; TamperDCD RTC_IRQHandler ; RTCDCD RCC_IRQHandler ; RCCDCD EXTI0_IRQHandler ; EXTI Line 0DCD EXTI1_IRQHandler ; EXTI Line 1DCD EXTI2_IRQHandler ; EXTI Line 2DCD EXTI3_IRQHandler ; EXTI Line 3DCD EXTI4_IRQHandler ; EXTI Line 4DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7DCD ADC1_2_IRQHandler ; ADC1 & ADC2DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0 DCD CAN1_RX1_IRQHandler ; CAN1 RX1DCD CAN1_SCE_IRQHandler ; CAN1 SCEDCD EXTI9_5_IRQHandler ; EXTI Line 9..5DCD TIM1_BRK_IRQHandler ; TIM1 BreakDCD TIM1_UP_IRQHandler ; TIM1 UpdateDCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation DCD TIM1_CC_IRQHandler ; TIM1 Capture CompareDCD TIM2_IRQHandler ; TIM2DCD TIM3_IRQHandler ; TIM3DCD TIM4_IRQHandler ; TIM4DCD I2C1_EV_IRQHandler ; I2C1 EventDCD I2C1_ER_IRQHandler ; I2C1 ErrorDCD I2C2_EV_IRQHandler ; I2C2 EventDCD I2C2_ER_IRQHandler ; I2C2 ErrorDCD SPI1_IRQHandler ; SPI1DCD SPI2_IRQHandler ; SPI2DCD USART1_IRQHandler ; USART1DCD USART2_IRQHandler ; USART2DCD USART3_IRQHandler ; USART3DCD EXTI15_10_IRQHandler ; EXTI Line 15..10DCD RTCAlarm_IRQHandler ; RTC Alarm through EXTI Line DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend DCD TIM8_BRK_IRQHandler ; TIM8 BreakDCD TIM8_UP_IRQHandler ; TIM8 UpdateDCD TIM8_TRG_COM_IRQHandler ; TIM8 Trigger and Commutation DCD TIM8_CC_IRQHandler ; TIM8 Capture CompareDCD ADC3_IRQHandler ; ADC3DCD SDIO_IRQHandler ; SDIODCD TIM5_IRQHandler ; TIM5DCD SPI3_IRQHandler ; SPI3DCD UART4_IRQHandler ; UART4DCD UART5_IRQHandler ; UART5DCD TIM6_IRQHandler ; TIM6DCD TIM7_IRQHandler ; TIM7DCD DMA2_Channel1_IRQHandler ; DMA2 Channel1DCD DMA2_Channel2_IRQHandler ; DMA2 Channel2DCD DMA2_Channel3_IRQHandler ; DMA2 Channel3DCD DMA2_Channel4_5_IRQHandler ; DMA2 Channel4 & Channel5如下中断向量表的名字是不是和你的中断函数名相同。
分析初始化STM32串口后进入发送完成中断的现象

分析初始化STM32串口后进入发送完成中断的现象最近在调试STM32 串口过程中发现一个奇怪的问题,初始化串口1 口,使能串口发送完成中断后,立刻就进入了发送完成中断,21ic 论坛上也有同样的问题讨论,而香水版主并没有解释原因。
为了彻底的搞明白产生这一现象的原因:我仔细的看了STM32 手册中的串口部分的介绍:以下是字符发送的配置过程,注意第6 点,在设置USART_CR1 中的TE 位时,会发送一个空闲帧作为第一次数据发送,所以即便你执行了USART_ClearFlag(USART1,USART_FLAG_TC); (这个函数肯定在空闲帧数据发送完成前执行),所以当空闲帧发送完后,就进入发送完成中断。
配置步骤:1.通过在USART_CR1 寄存器上置位UE 位来激活USART2.编程USART_CR1 的M 位来定义字长。
3.在USART_CR2 中编程停止位的位数。
4.如果采用多缓冲器通信,配置USART_CR3 中的DMA 使能位(DMAT)。
按多缓冲器通信中的描述配置DMA寄存器。
5.利用USART_BRR 寄存器选择要求的波特率。
6.设置USART_CR1中的TE 位,发送一个空闲帧作为第一次数据发送。
7.把要发送的数据写进USART_DR 寄存器(此动作清除TXE 位)。
在只有一个缓冲器的情况下,对每个待发送的数据重复步骤7。
8.在USART_DR 寄存器中写入最后一个数据字后,要等待TC=1,它表示最后一个数据帧的传输结束。
当需要关闭USART 或需要进入停机模式之前,需要确认传输结束,避免破坏最后一次传输。
解决的办法:方法一在执行USART_ITConfig(USART1, USART_IT_TC, ENABLE); 之前,先延时一段时间,基本上比一个字符发送的时间长一点就可以了,然后再执行USART_ClearFlag(USART1, USART_FLAG_TC);方法二:在执行USART_ITConfig(USART1, USART_IT_TC, ENABLE); 之前,USART_ClearFlag(USART1,。
STM32 串口中断处理方法
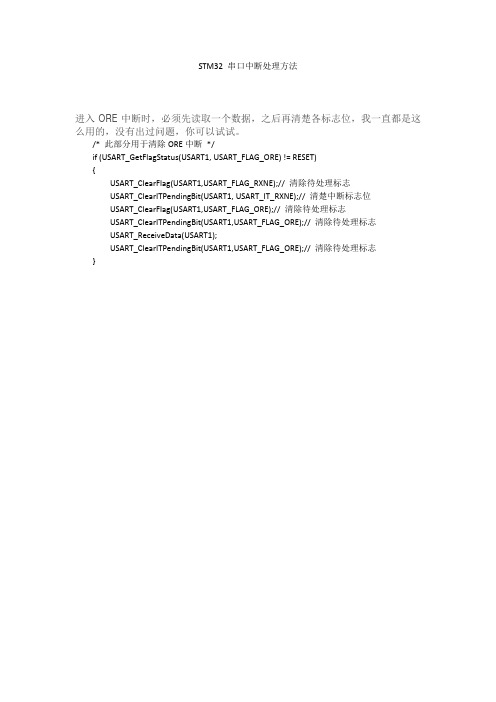
调试发现是串口中断硬件 BUG:
1. USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);使能了接收中断,那么 ORE 中断也同 时被开启了。
2. ORE 中断只能使用 USART_GetFlagStatus(USART1, USART_FLAG_ORE) 读到(没有使 能 USART_IT_ERR 中断时) 解决办法:
4.找资料 STM32F10x 微控制器参考手册(2009 年 12 月第 10 版)P541 发现如下说明:
也就是说只要接收中断打开,即 RXNEIE 设置为 1,那么 ORE 中断也自动打开了。 可是 USART_GetITStatus(USART1, USART_IT_ORE )== RESET!!!! 找到 USART_GetITStatus(USART1, USART_IT_RXNE)函数,发现只有当 USART_IT_ERR 中断使 能时,才能读到 ORE 中断。 在这里要指出这个 BUG:产生 ORE 中断了,但使用 USART_GetITStatus()函数却无法读到这个中断被 SET 起来!
}
2.为什么会一直跑到接收中断? 断点之后发现(USART_GetITStatus(USART1, USART_IT_RXNE)==RESET 的,也就是说没有数据 接收到也进了中断,而且在 USART 配置中我也只打开了接收中断!没有数据送过来应该是不可能进入中断 的!
3.响应了什么中断? 我想通过函数(USART_GetITStatus()把所有中断状态都读出来,但失败了,USART_IT_XXX 所有中断 状态都是 RESET!也就是说没有中断也进入到这个中断服务程序来了!?
学习6__STM32--SPI外设之中断收发---

学习6__STM32--SPI外设之中断收发---<⽬标> STM32双机 SPI中断收发通信<描述> # STM32双机配置为⼀主⼀从模式 # 采⽤主机中断发送,从机中断接收 # 收发机制采⽤不间断收发(发送为空就发送,接收⾮空就接收,中间⽆其他操作打断) # 就是单字节发送与接收<问题> 从机接收端会出现,接收到的数据可能是原始发送数据也会是错误数据,出现这种现象的条件是发送主机复位、发送主机重新上电、随时间变化(物理碰触等)都会产⽣错误数据,⽽复位接收从机、重新上电接收从机会纠正数据<分析> # STM32双机未共地导致 共地后问题依旧 # STM32未使⽤NSS引脚导致 使⽤后问题依旧 # ⼯作模式改变尝试(发送与接收⼯作模式配置为不匹配) 问题依旧 # 主机发送太过频繁导致,导致接收来不及接收导致 拉⼤发送数据周期问题依旧 # 从数据结果上分析,应该是发送主机与接收从机未同步导致,接收总线的数据先由移位寄存器接收,再copy⾄数据寄存器,所以分析数据错位现象是出现在移位寄存器中,⽐如正在传输中由复位操作或断电操作等,致使移位寄存器只接收了3bit数据,⽽SPI数据的接收机制是,移位寄存器收满8bit数据后copy⾄数据寄存器,这⼀切都是硬件完成,注意数据的搬移是copy,所以移位寄存器中的数据还在即数据残留特性,就像刚刚的这种中断操作⾏为导致移位寄存器残留了当前字节的3bit数据,未满8bit数据故不会copy⾄数据寄存器,所以等待恢复⼯作后,需要再接收5bit数据,这样满8bit数据后copy⾄spi->DR,但是这1byte数据中的前3bit与后5bit数据本不是⼀个有效byte数据,就导致读到1byte⽆效数据,产⽣了接收错误数据的现象<解决> # 拉⼤发送数据周期&在进⼊接收中断后先关闭SPI外设,然后再读取数据,出中断前开始SPI外设 > 在进⼊中断服务程序后关闭spi外设,将导致在关闭外设期间发⽣的中断⽽被忽视,尤其是多数据连续发送,⽐如DMA数据发送,实测将导致丢数据,即其中的部分中断未作出响应⽽丢弃。
STM32HAL库使用中断实现串口接收不定长数据

STM32HAL库使⽤中断实现串⼝接收不定长数据 以前⽤DMA实现接收不定长数据,DMA的⽅法接收串⼝助⼿的数据,全部没问题,不过如果接收模块返回的数据,⽽这些数据如果包含回车换⾏的话就会停⽌接收,例如接收:AT\r\nOK\r\n,就只能接收到AT\r,导致没有接收完成,具体原因还没搞懂,有了解的,希望可以告知⼀下,DMA不定长接收⽅法传输门:。
好了,不多说了,现在进⼊正⽂。
⾸先建⽴⼀个STM32Cumebx的⼯程,打开串⼝中断,完成配置,具体的配置流程就不细说了,没什么难度就只是打开串⼝跟中断⽽已。
⽣成⼯程代码后,先定义好⼀些变量://串⼝4中断接收定义#define MAX_RECV_LEN 1024 //设定可以接收的最⼤字节uint8_t msg_buff[MAX_RECV_LEN] = {0}; //接收缓存区uint8_t * msg = msg_buff; //定义⼀个指针指向接收缓存区int flag = 0; //接收完成标志int len_u4=0; //数据长度记录 接着重写串⼝接收回调函数/*重写串⼝接收回调函数*/void HAL_UART_RxCpltCallback(UART_HandleTypeDef*UartHandle){uint8_t ret = HAL_OK;msg++;len_u4++;//数据长度计数if( msg == msg_buff + MAX_RECV_LEN){msg = msg_buff;}do{ret = HAL_UART_Receive_IT(UartHandle,(uint8_t *)msg,1);}while(ret != HAL_OK);if(*(msg-1) == '\n') //接收以\n为结尾字符,则表⽰接收完成{flag = 1;}} 最后在main函数⾥⾯编写接收后的逻辑,注意要在while(1){ }前打开串⼝接收中断int main(void){/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration----------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init(); MX_DMA_Init(); MX_USART3_UART_Init();MX_UART4_Init();/* USER CODE BEGIN 2 *//* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE *///⾃⼰添加代码部分:while前打开串⼝中断接收HAL_UART_Receive_IT(&huart4, (uint8_t *)msg, 1); //开启第⼀次中断while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 *///======⾃⼰添加代码部分=========if (flag == 1){printf("msg_buff = %s ;len = %d\r\n",msg_buff,len_u4); HAL_Delay(100); //加延时,保证接收到数据过长的时候,等待数据存⼊缓存区发送HAL_UART_Transmit(&huart3,msg_buff, len_u4,100); //将串⼝4接收到的数据通过串⼝3传出memset(msg_buff, 0, sizeof(msg_buff)); //清空缓存区// 指向接收缓存的头部msg = msg_buff;(&huart4)->pRxBuffPtr = msg;flag = 0;len_u4=0;//每次数据长度清0}HAL_Delay(10);}//==============================/* USER CODE END 3 */} 运⾏结果如下,效果正确 谈谈串⼝RS232跟RS485:这两个串⼝除了逻辑电平不同外,还有传输距离也不同,如果对速度要求不⾼,传输距离要⽐较远的就⽤RS485⽐较好,虽然RS485是个半双⼯,但是抑制共模⼲扰能⼒⽐较强,不过这些只是对于硬件层⾯的,对于软件层⾯来说他们的本质都是串⼝,在STM32Cubemx中,都是只是配置为串⼝,按照串⼝的编程来处理即可。
STM32F103外部中断

#ifdef VECT_TAB_RAM /* Set the Vector Table base location at 0x20000000 */ NVIC_SetVectorTable(NVIC_VectTab_RAM, 0x0);
#else /* VECT_TAB_FLASH */ /* Set the Vector Table base location at 0x08000000 */ NVIC_SetVectorTable(NVIC_VectTab_FLASH, 0x0);
GPIO_Init(GPIOB, &GPIO_InitStructure);
/* Configure PB9 as input floating (EXTI Line9) */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; GPIO_Init(GPIOB, &GPIO_InitStructure);
3. GPIO 口的初始化
/*******************************************************
***** 外部中断 EXT5 的 中断线 对应的 GPIO 配置 ******
Байду номын сангаас
***** 外部中断管脚: GPIOB_Pin_5,浮动输入
******/
void EXTI_SetupGPIO(void)
中断线 所产生的中断服务 都在同一个中断入口所对应的中断服务函数 ,因此它不能去分 中断线 5 还是 9,因此使用这一中断通道时,外部中断线(以及中断线映射的对应的管脚) 都只能在 5~9 当中的一个,当有效边沿产生时,就会产生中断,进入中断服务子程序。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
BIC R1, #0X80
STR R1, [R0]
POP {R0-R8, PC}
;;;;;串口中断;;;;;;
USART1_IRQHandler
EXPORT USART1_IRQHandler
LDR R1, =RECEVIE_CNT ;数据接收数组指针
LDRB R2, [R1]
LDRB R4, [R0] ;将数据从串口装载到数据接收数组
LDR R3, =BUF_RECEVIE
STRB R4, [R3, R2]
ADD R2, #1 ;数据接收数组指针加1
int main(void)
{
Stm32_Clock_Inint(); //*****初始化时钟
USART_INIT(); //*****串口初始化
while(1)
{
recevie_num = USART_GET_RECEVIE_LEN(); //接收到的数据个数
LDRB R3, [R2]
CMP R3, #MAX_BUF_NUM
BEQ USART_SEND_FULL
ADD R3, #1
STRB R3, [R2]
CPSIE I
LDR R3, =SEND_DATA_CT ;得到发送数据数组指针
PUSH {R0-R8, LR}
LDR R0, =USART1_SR
LDR R1, [R0]
TST R1, #Bit5
LDRB R4, [R3, R2]
STRB R4, [R0, R6]
ADD R2, #1 ;接收数组数据指针加1
CMP R2, #MAX_BUF_NUM
MOVEQ R2, #0
STRB R2, [R5]
ADD R6, #1
CMP R6, R1
CMP R2, #MAX_BUF_NUM
MOVEQ R2, #0
STRB R2, [R1]
POP {R0-R8, PC}
RECEVIE_FULL ;接收满
POP {R0-R8, PC}
;;;;;发送数据到串口;;;;
USART_SEND
POP {R1-R8, PC}
;;;;;从接收数组读取数据;;;;;
;void USART_RECEVIE_DATA(u8 *pp, u8 datalen);
USART_RECEVIE_DATA
EXPORT USART_RECEVIE_DATA
PUSH {R0-R8, LR}
RECEVIE_CNT DCB 0 ;接收串口数据到数组的指针
RECEVIE_GET_CT DCB 0 ;接收到的数据个数
RECEVIE_DATA_CT DCB 0 ;读取数组数据的指针
BUF_SEND SPACE MAX_BUF_NUM ;发送缓存
STR R1, [R0]
;中断分组,设置中断优先级,开启串口总中断
MOV R0, #0
MOV R1, #1
LDR R2, =USART1_IRQChannel
MOV R3, #2
BL MY_NVIC_Init
POP {R0-R8, PC}
//本文档是在STM32103VE中实现串口中断接收和中断发送数据,将采用循环边收边发将串口接收到的数据实时发送出去。
//串口接收发送代码用汇编编写。
//本软件测试在波特率115200通过串口软件从上位机发送6000字节的文档,单片机接收后将数据发送回上位机。
u8 recevie_num;
if(recevie_num != 0)//是否有数据需要发送
{
USART_RECEVIE_DATA(&recevie_send_data[0], recevie_num); //读取接收到的数据
USART_SEND_DATA(&recevie_send_data[0], recevie_num); //发送接收的数据
MOV R6, #0
LOOP2
CPSID I ;由于RECEVIE_GET_CT变量在接收中断里面也用所以要先关闭中断不然变量值会不同步
LDR R5, =RECEVIE_GET_CT ;接收数组的数据个数
LDRB R2, [R5]
CMP R2, #0
}
}
}
IMPORT MY_NVIC_Init
MAX_BUF_NUM EQU 200 ;数组最大接收发送值
PRESERVE8 ;堆栈对齐
AREA USART_DATA, DATA, READWRITE
BUF_RECEVIE SPACE MAX_BUF_NUM ;接收缓存
STR R1, [R0]
POP {R0-R8, PC}
USART_SEND_FULL ;发送满
POP {R0-R8, PC}
;;;;;从串口接收数据;;;;;;
USART_RECEVIE
EXPORT USART_RECEVIE
PUSH {R0-R8, LR}
LDR R0, =USART1_BRR
;MOV R1, #0X1D4C ;9600
MOV R1, #0X271 ;115200
;MOV R1, #0X3A98 ;4800
STR R1, [R0]
;USART1使能 发送使能 接收使能
;;;;;得到串口接收到的数据个数;;;;;
USART_GET_RECEVIE_LEN
EXPORT USART_GET_RECEVIE_LEN
PUSH {R1-R8, LR}
LDR R1, =RECEVIE_GET_CT ;接收到的数据个数
LDRB R0, [R1]
LDRB R5, [R3]
LDR R2, =BUF_SEND ;将要发送的数据装载到发送数组
LDRB R4, [R0, R6]
STRB R4, [R2, R5]
ADD R5, #1 ;发送数据数组指针加1
CMP R5, #MAX_BUF_NUM
STRB R3, [R4]
ADD R1, #1 ;要发送数据指针加1
CMP R1, #MAX_BUF_NUM
MOVEQ R1, #0
STRB R1, [R0]
POP {R0-R8, PC}
USART_SEND_END
LDR R0, =USART1_CR1 ;关闭发送中断
BNE LOOP2
DATA_ENPTY
POP {R0-R8, PC}
;;;;;将要发送的数据装载到发送数组;;;;;
;void USART_SEND_DATA(u8* pp, u8 datalen);
USART_SEND_DATA
EXPORT USART_SEND_DATA
PUSH {R0-R8, LR}
MOV R6, #0
LOOP1
CPSID I ;由于SEND_SEND_CT变量在发送中断里面也用所以要先关闭中断不然变量值会不同步
LDR R2, =SEND_SEND_CT ;要发送数据的个数
;;;;;;;串口初始化;;;;;;
USART_INIT
EXPORT USART_INIT [WEAK]
PUSH {R0-R8, LR}
;开串口1时钟
LDR R0, =RCC_APB2ENR
LDR R1, [R0]
ORR R1, #Bit14
EXPORT USART_SEND
PUSH {R0-R8, LR}
LDR R0, =SEND_SEND_CT ;要发送数据的个数
LDRB R1, [R0]
CMP R1, #0
BEQ USART_SEND_END
SUB R1, #1
BEQ DATA_ENPTY
SUB R2, #1
STRB R2, [R5]
CPSIE I
LDR R5, =RECEVIE_DATA_CT ;得到接收数组数据指针
LDRB R2, [R5]
LDR R3, =BUF_RECEVIE ;将数据从接收数组拷贝到目标地址
MOVEQ R5, #0
STRB R5, [R3]
ADD R6, #1
CMP R6, R1 ;数据装载完成?
BNE LOOP1
LDR R0, =USART1_CR1 ;开发送中断
LDR R1, [R0]
ORR R1, #0X80
;复位USART1,先置位 再清零
LDR R0, =RCC_APB2RSTR
LDR R1, [R0]
ORR R1, #Bit14
STR R1, [R0]
LDR R1, [R0]
BIC R1, #Bit14
STR R1, [R0]
;设置成9600波特率
ORR R1, #Bit2
STR R1, [R0]
;配置串口管脚
LDR R0, =GPIOA_CRH
LDR R1, [R0]
AND R1, #0XFFFFF00F
ORR R1, #0X000008B0
STR R1, [R0]
u8 recevie_send_data[200];
void USART_INIT(void);
void USART_SEND_DATA(u8* pp, u8 datalen);
void USART_RECEVIE_DATA(u8 *pp, u8 datalen);