stm32F1外部脉冲计数(库函数实现)
STM32 主从定时器 输出固定数量脉冲

在仪器仪表计量、步进电机驱动等领域,有时需要控制电路输出固定数量的PWM,常规方法一般为中断计数法,即将单片机定时器配置成PWM输出模式,然以在PWM中断中对脉冲进行计数,当脉冲数量达到设定值时即关断PWM输出,这种方法程序上比较简单,但是当输出频率较高时,计数中断会频繁打断系统的正常运行,对系统运行效率会产生一定影响。
另一种输出方式是利用主从定时器的原理,本文就介绍下该种方式。
1输出原理介绍STM32单片机具有定时器同步功能,可以配置多个定时器在内部相连,当一个定时器配置为主模式时,可以对另一个配置成从模式的定时器进行复位、启动、停止或提供时钟的操作。
而主从定时器输出固定脉冲就是利用了一个定时器充当另一个定时器的预分频的原理实现的。
1.1 使用一个定时器作为另一个定时器的预分频器上图为基本框图,将定时器1配置成定时器2的预分频后,定时器1负责输出PWM,每个输出脉冲的边沿在内部作为定时器2的输入时钟,通过配置定时器2的溢出值即可实现对定时器1脉冲输出个数的检测。
1.1.1配置思路:1)配置定时器1为主模式,它可以在每一个更新事件UEV时输出一个周期性的触发信号。
在TIM1_CR2寄存器的MMS=’010’时,每当产生一个更新事件时在TRGO1上输出一个上升沿信号。
2)连接定时器1的TRGO1输出至定时器2,设置TIM2_SMCR寄存器的TS=’000’,配置定时器2为使用ITR1作为内部触发的从模式。
3)把从模式控制器置于外部时钟模式1(TIM2_SMCR寄存器的SMS=111),这样定时器2即可由定时器1周期性的上升沿(即定时器1的计数器溢出)信号驱动。
4)设置相应(TIMx_CR1寄存器)的CEN位分别启动两个定时器。
摘录自手册P278。
1.1.2寄存器配置流程1)配置定时器1为主模式,送出它的更新事件UEV做为触发输出(TIM1_CR2寄存器的MMS=’010’)。
然后每次计数器溢出时输出一个周期信号。
STM32库函数功能详解

STM32库函数功能详解STM32是一款广泛应用于嵌入式系统中的微控制器系列,由意法半导体(STMicroelectronics)开发。
它具有高性能、低功耗和丰富的外设功能,广泛应用于各种应用领域。
为了方便开发者进行快速开发和简化编程流程,STM32提供了一系列库函数,本文将对其功能进行详细解析。
1.GPIO库函数:GPIO库函数用于配置STM32的通用输入输出口(GPIO)功能,包括输入、输出模式的配置和读写操作。
通过GPIO库函数,开发者可以方便地读取外部输入信号、控制外部设备的输出。
例如,使用GPIO库函数可以简单地配置一个引脚为输入模式,并读取其电平状态,或者配置一个引脚为输出模式,并设置其输出电平。
2.EXTI库函数:EXTI库函数用于配置STM32的外部中断(EXTI)功能,可以实现对外部事件的中断响应功能。
通过EXTI库函数,开发者可以方便地配置外部中断的触发方式和优先级,以及处理中断事件。
例如,使用EXTI库函数可以配置一个引脚为上升沿触发模式,并在引脚触发中断时执行相应的中断服务函数。
3.RCC库函数:RCC库函数用于配置和控制STM32的时钟系统(RCC),包括各个外设模块和系统时钟的配置。
通过RCC库函数,开发者可以方便地配置STM32的时钟源、时钟分频和时钟使能。
例如,使用RCC库函数可以配置系统时钟为指定频率,以及使能和配置外设时钟。
4.NVIC库函数:NVIC库函数用于配置和控制STM32的中断控制器(NVIC)功能,包括中断向量表和中断优先级的配置。
通过NVIC库函数,开发者可以方便地配置中断向量表和中断优先级,以及控制中断的使能和屏蔽。
例如,使用NVIC库函数可以配置一个外部中断的优先级和使能状态,以及控制中断的屏蔽和释放。
5.ADC库函数:ADC库函数用于配置和控制STM32的模数转换器(ADC)功能,可以实现模拟信号的数字化转换。
通过ADC库函数,开发者可以方便地配置ADC的转换通道、采样速率和转换模式。
stm32脉冲计数原理
stm32脉冲计数原理一、介绍在嵌入式系统开发中,我们经常需要对脉冲进行计数,以测量某种事件的频率或持续时间。
stm32是一系列基于Cortex-M内核的32位微控制器,具有强大的计数功能,可以轻松实现脉冲计数。
二、stm32计数器基础stm32微控制器通常具有多个计数器,这些计数器可以提供高精度和高速的计数能力。
stm32的计数器通常是由一个预分频器、一个计数器和一个自动装载寄存器组成。
2.1 预分频器预分频器可以将输入脉冲的频率降低到计数器的工作范围内。
它通常采用二进制计数器或16位定时器进行实现,可以根据需要设置不同的分频比。
2.2 计数器计数器用于计数输入脉冲的数量。
stm32的计数器通常是一个16位或32位的寄存器,可以根据需要进行设置。
2.3 自动装载寄存器自动装载寄存器用于设置计数器的上限值。
当计数器达到该值时,会自动重置计数器,并触发一个中断或其他事件。
三、stm32脉冲计数原理stm32的脉冲计数原理基于计数器的工作方式和外部脉冲的输入引脚。
通过配置计数器的工作模式和相关的寄存器,可以实现对输入脉冲的计数。
3.1 输入捕获模式输入捕获模式是常用的脉冲计数方式之一。
在该模式下,stm32可以捕获到外部脉冲的上升沿或下降沿,并将计数器的值保存在相关的寄存器中。
3.2 边沿对齐模式边沿对齐模式是另一种常用的脉冲计数方式。
在该模式下,stm32可以捕获到外部脉冲的上升沿和下降沿,并将计数器的值保存在两个相关的寄存器中。
3.3 测量脉冲频率通过对输入脉冲的计数和计时,可以测量脉冲的频率。
根据 stm32 提供的计数器的位数,可以计算出脉冲的高精度频率值。
3.4 测量脉冲持续时间除了测量脉冲频率,stm32还可以测量脉冲的持续时间。
通过记录脉冲的开始时间和结束时间,可以计算出脉冲的持续时间。
四、stm32脉冲计数的应用stm32脉冲计数广泛应用于各种需要对脉冲进行计数的场景,例如:4.1 频率测量通过 stm32 脉冲计数功能,可以测量各种信号源的频率,如电机转速、传感器输出等。
STM32F10x_Flash库函数介绍

寄存器
描述
RDR
读出选择字节
USER
用户选择字节
Data0
Data0选择字节
Data1
Data1选择字节
WRP0
写保护0选择字节
WRP1
写保护1选择字节
WRP2
写保护2选择字节
WRP3
写保护3选择字节
FLASH 也在文件“stm2f10x_map.h”声明如下:
/* Flash registers base address */ #define FLASH_BASE ((u32)0x40022000) /* Flash Option Bytes base address */ #define OB_BASE ((u32)0x1FFFF800) #ifndef DEBUG ... #ifdef _FLASH #define FLASH ((FLASH_TypeDef *) FLASH_BASE) #define OB ((OB_TypeDef *) OB_BASE) #endif /*_FLASH */ ... #else /* DEBUG */ ... #ifdef _FLASH EXT FLASH_TypeDef *FLASH; EXT OB_TypeDef *OB; #endif /*_FLASH */ ... #endif
typedef struct { vu16 RDP; vu16 USER; vu16 Data0; vu16 Data1; vu16 WRP0; vu16 WRP1; vu16 WRP2;
vu16 WRP3; }OB_TypeDef;
Table 142.和 Table 143.例举了FLASH所有寄存器和选择字节(Option Byte OB)寄存器
外部脉冲计数器设计的原理及实现

外部脉冲计数器设计的原理及实现随着科技的不断发展,单片机以其高效、可靠的特性被广泛应用于各种场合,如自动化控制、电子测量等领域。
在单片机应用中,计数器是常见的一种功能模块,其可用于计数输入的脉冲信号,从而实现各种功能。
本篇论文主要介绍如何设计一种基于单片机的外部脉冲计数器,包括其原理及实现过程。
同时,还将介绍各种技术要点如计数器的组成、计数器工作模式、计数器的特性以及计数器的应用场景等。
一、外部脉冲计数器的原理1.计数器的组成计数器是由多个触发器组成的。
触发器是基本单元,它能够改变状态。
在计数器中,触发器负责存储计数值,多个触发器串联构成计数器。
一般的,计数器可分为同步计数器和异步计数器。
同步计数器:所有的触发器同时改变状态,这样称为同步计数器Synchronous Counter/异步计数器:各个触发器改变状态的时刻不同步的计数器,称为异步计数器Asynchronous Counter。
2.计数器的工作模式计数器具有自动计数功能。
计数器可以在几种模式下工作:自动计数,手动计数,自动循环计数。
自动计数:只需输入一个计数信号,计数器便可以开始计数。
在计数到设定值之后,计数器会自动停止计数。
手动计数:需要通过用户手动操作来进行计数,这种计数方式使用较少。
自动循环计数:计数器会不停地计数,在计数到设定值之后会自动重新计数。
3.计数器的特性计数器的特性取决于计数器的触发器特性,常见的触发器有RS触发器、D触发器、JK触发器和T触发器等。
以下是一些常见触发器类型的特性:RS触发器:RS触发器具有两个控制输入R和S,可以将输出强制设置为1或0。
当R、S同时为0时,输出保持不变,称为稳态。
当R为0、S为1时,输出为0;当R为1、S为0时,输出为1。
D触发器:D触发器只有一个输入D,当D的电平变化时,输出Q会跟着变化。
当D为0时,Q输出0,当D为1时,Q输出1。
JK触发器:JK触发器具有两个输入J和K。
当J、K、时钟信号分别被输入到JK 触发器时,输出状态会发生变化。
对外部脉冲计数系统的设计计数器课程设计(单片机)
湖南工业大学课程设计资料袋理学学院(系、部)2012 ~ 2013 学年第 1 学期课程名称单片机应用系统指导教师周玉职称副教授学生姓名张思远专业班级电子科学102 学号10411400223 题目对外部脉冲计数系统的设计成绩起止日期2013 年01 月06 日~2013 年01 月10 日目录清单湖南工业大学课程设计任务书2012 —2013 学年第1 学期理学院学院(系、部)电子科学专业102 班级课程名称:单片机应用系统设计题目:对外部脉冲计数系统的设计完成期限:自2013 年01 月06 日至2013 年01 月10 日共 1 周指导教师(签字):年月日系(教研室)主任(签字):年月日附件三(单片机应用系统)设计说明书(题目)对外部脉冲计数系统的设计起止日期:2013 年01 月06 日至2013 年01 月10 日学生姓名张思远班级电子科学102学号10411400223成绩指导教师(签字)电气与信息工程学院2012年12 月10 日一、设计任务:1.1 外部脉冲自动计数,自动显示。
1.1.1设计一个255计数器:0-255计数,计满后自动清0,重新计数(在数码管中显示)。
1.1.2设计一个50000计数器:0-50000计数,计满后自动清0,重新计数(在数码管中显示)。
注:要求首先采用PROTEUS完成单片机最小系统的硬件电路设计及仿真;程序仿真测试通过后,再下载到单片机实训板上执行。
二、硬件设计介绍:※STC89C52单片机;※6位共阴或者共阴极数码管;※外部晶振电路;※ISP下载接口(In system program,在系统编程);※DC+5V电源试配器(选配);※ISP下载线(选配)※6个PNP(NPN)三极管※12个碳膜电阻三、硬件设计思路方案一:五个1位7段数码管,无译码器方案二:五个1位7段数码管,译码器方案三:1个6位7段数码管,译码器方案四:1个6位7段数码管,无译码器考虑实际中外围设备、资金、单片机资源利用率、节省端口数量,可实行性以及连接方便等问题,采用6为数码管(共阳或者共阴极)由于实际中没买到6位的,采用2个三位数码管并接组合一个6位数码管形式;由于实际P口驱动能力有限,故采用6位三极管增大驱动能力,已便足以使得6位数码管亮度明显正常工作,增加6个电阻限流保护数码管不被烧坏。
stm32计数器原理
stm32计数器原理STM32计数器原理简介STM32是一款广泛应用于嵌入式系统中的32位微控制器。
其中,计数器是STM32微控制器的一个重要功能模块,它能实现多种计数任务,并广泛应用于定时器、PWM控制、频率计量等领域。
计数器基础知识在开始深入了解STM32计数器原理之前,我们需要先了解一些基础知识。
计数器的定义计数器是一种能够记录和显示计数数值的设备或模块。
它通常是通过一个时钟信号来提供计数脉冲,然后根据这些脉冲进行计数。
STM32计数器STM32微控制器中的计数器包含多个计数寄存器,用于记录计数值。
它们能够根据不同的应用场景和需求进行配置和使用。
STM32计数器的工作原理STM32计数器的工作原理是基于定时器模块实现的。
定时器模块通常包含一个或多个计数器,用于进行计数操作。
下面将详细介绍STM32计数器的工作原理。
计数器的时钟输入STM32计数器需要一个时钟信号作为计数的驱动源。
通常情况下,计数器由一个定时器提供时钟信号。
计数器的计数方式STM32计数器可以以不同的计数方式进行计数,常见的计数方式有以下几种:1.上升计数:计数器从一个初始值开始,每次接收到一个时钟脉冲时,计数值加一。
2.下降计数:与上升计数相反,每次接收到一个时钟脉冲时,计数值减一。
3.上升/下降计数:每次接收到一个时钟脉冲时,根据计数器的当前状态选择上升或下降计数。
计数器的控制和配置STM32计数器可以通过配置寄存器进行控制和配置。
配置寄存器通常包含计数器的计数模式、计数方向、计数时钟源等参数,可以根据具体需求进行设置。
计数器的溢出当计数器达到最大值时,会发生溢出。
溢出时,计数器会重新从初始值开始计数,并触发相应的中断或其他处理操作。
STM32计数器的应用STM32计数器广泛应用于各种领域和应用场景:1.定时器:通过设定计数器的初始值和工作模式,实现定时功能。
2.PWM控制:利用计数器的计数值和计数模式,产生不同占空比的PWM信号,实现对电机、灯光等设备的精确控制。
STM32库函数功能详解

STM32库函数简介一、通用输入/输出(GPIO)--------------------------------------------------------------------------------------------3二、外部中断/事件控制器(EXTI)-----------------------------------------------------------------------------------7三、通用定时器(TIM)-------------------------------------------------------------------------------------------------9四:ADC寄存器------------------------------------------------------------------------25五:备份寄存器(BKP)-------------------------------------------------------------------------------------------------33六、DMA控制器(DMA)---------------------------------------------------------------37七、复位和时钟设置(RCC)------------------------------------------------------------------------------------------41八、嵌套向量中断控制器(NVIC)-----------------------------------------------------------------------------------49命名规则在函数名中,只允许存在一个下划线,用以分隔外设缩写和函数名的其它部分。
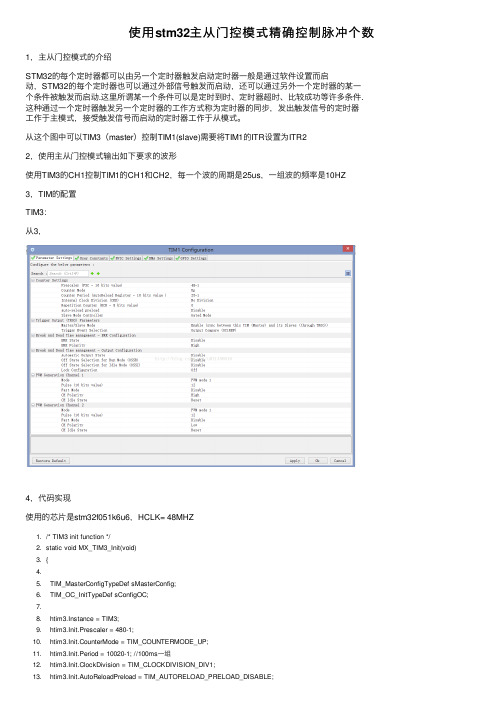
使用stm32主从门控模式精确控制脉冲个数
stm32脉冲计数原理
stm32脉冲计数原理一、背景介绍STM32是一款基于ARM Cortex-M内核的32位微控制器,具有高性能和低功耗的特点,广泛应用于工业自动化、智能家居、医疗设备等领域。
脉冲计数是STM32中常用的功能之一,可以用于计算旋转速度、测量距离等。
二、脉冲计数原理脉冲计数是通过对输入信号进行计数来实现的。
在STM32中,可以通过定时器模块来实现脉冲计数功能。
定时器模块包括TIM1-TIM17共17个定时器,在不同的应用场景下可以选择不同的定时器。
三、定时器工作原理定时器是STM32中一个非常重要的外设,它主要用于产生精确的时间延迟和周期性触发事件。
在脉冲计数中,我们主要使用定时器的输入捕获和输出比较功能。
输入捕获:当一个外部信号到达定时器输入引脚时,可以通过设置输入捕获模式来记录当前定时器计数值,并将其保存在寄存器中。
这样就可以实现对信号频率和周期的测量。
输出比较:当定时器计数值与预设值相等时,可以通过设置输出比较模式来触发一个输出信号。
这样就可以实现对信号占空比的测量。
四、脉冲计数实现步骤1. 配置GPIO引脚为定时器输入模式,并连接外部信号源。
2. 配置定时器为输入捕获模式,并设置计数器的时钟源和分频系数。
3. 在中断服务函数中,读取捕获寄存器的值,并进行计算,得出脉冲数量或频率等参数。
4. 根据需要,可以将脉冲数量或频率等参数通过串口或其他方式输出。
五、注意事项1. 在使用定时器时,需要根据具体应用场景选择合适的定时器和工作模式。
2. 在配置GPIO引脚和定时器时,需要仔细查阅STM32的相关手册和数据表,确保配置正确。
3. 在中断服务函数中,需要注意处理溢出情况以及多次触发的问题。
六、总结STM32的脉冲计数功能是一种非常实用的功能,在工业自动化、智能家居等领域有广泛应用。
了解其原理和实现方法对于开发人员来说非常重要。
在使用过程中需要注意各种细节问题,确保系统稳定可靠。
如何采用STM32中的控制定时器Tim1实现计数器功能
如何采用STM32中的控制定时器Tim1实现计数器功能
如何采用STM32中的控制定时器Tim1实现计数器功能
STM32中的高级控制定时器(Tim1)是由一个16位的自动装载计数器组成,它由一个可编程预分频器驱动。
用途在于:测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较,PWM,嵌入死区时间的互补PWM等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
具体如下:
16位上下,自动装载计数器。
16位可编程预分频器,计数器时钟频率的分频率的分频系数为1-65535之间任意数值,4个独立通道:
输入捕获
输出比较
PWM生成
单脉冲模式输出
死区时间可编程的互补输出
使用外部信号控制定时器和定时器互连的同步电路
在指定数目的计数器周期之后更新定时器寄存器
刹车输入信号可以将定时器输出信号置于复位状态或者一个已知状态
如下事件发生时产生中断:
更新:计数器向上溢出或者向下溢出,计数器初始化。
触发事件(计数器启动,停止,初始化)
输入捕获
输出比较
刹车信号输入。
STM32定时器脉冲计数踩坑

TRGI:内部边沿检测
TI1FP1/TI2FP2:编码器
内部时钟来自RCC,编码器接口暂不不懂。
外部触发计数,可能的通道有:
①TIMx_ETR — ETR — ETRP ---- ETRF ---- CK_PSC
②TIMx_ETR — ETR — ETRP — TRGI —CLKPSC
③TIMx_CH1 — TI1 — TI1F_ED — TRC — TRGI — CK-PSC
④TIMx_CH1/2 — TI1FP1/TI2FP2 — TRIG — CKPSC
主要是第③通道:
TI1 — TI1F ---- TI1F_Rising/TI1F_Falling有个或门 到达TI1F_ED.
当输入100个脉冲时,会有100个上沿和下降沿,所以TIM CNT计数值会是200而不是100.
从图中可以看到cnt计数器的时钟来源是ckpsc经过预分频器过来而ckpsc的时钟来源有5种
STM32定时器脉冲计数踩坑
本文记录了定时器脉冲计数几种方式:
首先看定时器框图:
在这里插入图片描述
从图中可以看到,CNT计数器的时钟来源是CK_PSC经过预分频器过来,而CK_PSC的时钟来源有5种:
CK_INT:“内部时钟
STM32库函数功能详解

STM32库函数功能详解1.GPIO库函数:GPIO库函数用于对STM32的GPIO外设进行初始化和控制。
包括GPIO的初始化、输入输出模式设置、上拉下拉设置、数据读写操作等。
通过这些函数,可以方便地对单片机的GPIO进行操作。
ART库函数:USART库函数用于对STM32的串口外设进行初始化和数据的收发操作。
包括串口的初始化、波特率设置、发送和接收数据等。
通过这些函数,可以方便地实现串口通信功能。
3.SPI库函数:SPI库函数用于对STM32的SPI外设进行初始化和数据传输操作。
包括SPI的初始化、数据传输的设置、发送和接收数据等。
通过这些函数,可以方便地实现SPI通信功能。
4.I2C库函数:I2C库函数用于对STM32的I2C外设进行初始化和数据传输操作。
包括I2C的初始化、数据传输的设置、发送和接收数据等。
通过这些函数,可以方便地实现I2C通信功能。
5.ADC库函数:ADC库函数用于对STM32的模数转换器进行初始化和数据转换操作。
包括ADC的初始化、转换通道的设置、启动转换和读取转换结果等。
通过这些函数,可以方便地实现模数转换功能。
6.PWM库函数:PWM库函数用于对STM32的定时器进行初始化和PWM输出操作。
包括定时器的初始化、周期和占空比的设置、启动和停止PWM输出等。
通过这些函数,可以方便地实现PWM输出功能。
7.NVIC库函数:NVIC库函数用于对STM32的中断控制器进行初始化和中断控制操作。
包括中断优先级的设置、中断使能和禁止控制等。
通过这些函数,可以方便地实现中断控制功能。
8.RCC库函数:RCC库函数用于对STM32的时钟控制器进行初始化和时钟设置操作。
包括时钟的使能和禁止、时钟源的选择和分频设置等。
通过这些函数,可以方便地实现时钟设置功能。
9.DMA库函数:DMA库函数用于对STM32的DMA控制器进行初始化和数据传输操作。
包括DMA的初始化、数据源和目的地的设置、启动和停止传输等。
stm32定时器原理

stm32定时器原理STM32定时器是一种用于计时和计数的重要功能模块,广泛应用于各种嵌入式系统中。
本文将介绍STM32定时器的原理及其应用。
一、STM32定时器的基本原理STM32定时器是基于计数器的工作原理,通过内部时钟源的驱动,实现对计数器的计数和定时功能。
STM32定时器主要有以下几个核心组件:1.1 时钟源:STM32定时器可以选择多种时钟源,如内部时钟、外部时钟或外部时钟源经过分频后的时钟。
时钟源的选择取决于应用的需要和系统的设计。
1.2 预分频器:预分频器用于将时钟源的频率进行分频,以获得更低的计数频率。
预分频器的分频系数可以通过配置来设置,从而满足不同的计数需求。
1.3 自动重装载寄存器(ARR):ARR用于设置定时器的计数周期,即定时器从0开始计数到ARR的值时就会触发中断或产生某种事件。
通过设置ARR的值,可以实现不同的定时功能。
1.4 计数器:计数器是STM32定时器的核心部件,用于进行实际的计数操作。
计数器的位数根据不同型号的STM32芯片而有所不同,常见的有16位和32位两种。
1.5 输出比较单元(OCU):OCU用于产生定时器的输出信号。
可以通过配置OCU的工作模式、比较值和输出极性等参数,实现各种不同的输出功能。
二、STM32定时器的应用STM32定时器广泛应用于各种嵌入式系统中,常见的应用场景包括:2.1 定时中断:通过设置定时器的ARR值和使能中断,可以实现定时中断功能,用于周期性地执行某些任务或操作。
例如,可以利用定时中断来定时采样、定时发送数据或定时更新显示等。
2.2 脉冲计数:通过配置STM32定时器的输入捕获单元(ICU),可以实现对外部脉冲信号的计数。
这在一些需要测量脉冲频率或脉冲宽度的应用中非常有用,如测速仪、计时器等。
2.3 PWM输出:通过配置STM32定时器的输出比较单元,可以实现PWM信号的输出。
PWM信号广泛应用于电机控制、LED调光、音量控制等场景,具有调节精度高、功耗低的特点。
如何采用STM32中的控制定时器Tim1实现计数器功能
如何采用STM32中的控制定时器Tim1实现计数器功能
STM32中的高级控制定时器(Tim1)是由一个16位的自动装载计数器组成,它由一个可编程预分频器驱动。
用途在于:测量输入信号的脉冲宽度(输入捕获),或者产生输出波形(输出比较,PWM,嵌入死区时间的互补PWM等)。
使用定时器预分频器和RCC时钟控制预分频器,可以实现脉冲宽度和波形周期从几个微秒到几个毫秒的调节。
具体如下:
16位上下,自动装载计数器。
16位可编程预分频器,计数器时钟频率的分频率的分频系数为1-65535之间任意数值,4个独立通道:
输入捕获
输出比较
PWM生成
单脉冲模式输出
死区时间可编程的互补输出
使用外部信号控制定时器和定时器互连的同步电路
在指定数目的计数器周期之后更新定时器寄存器
刹车输入信号可以将定时器输出信号置于复位状态或者一个已知状态
如下事件发生时产生中断:
更新:计数器向上溢出或者向下溢出,计数器初始化。
触发事件(计数器启动,停止,初始化)
输入捕获
输出比较
刹车信号输入。
定时器的外部脉冲计数功能
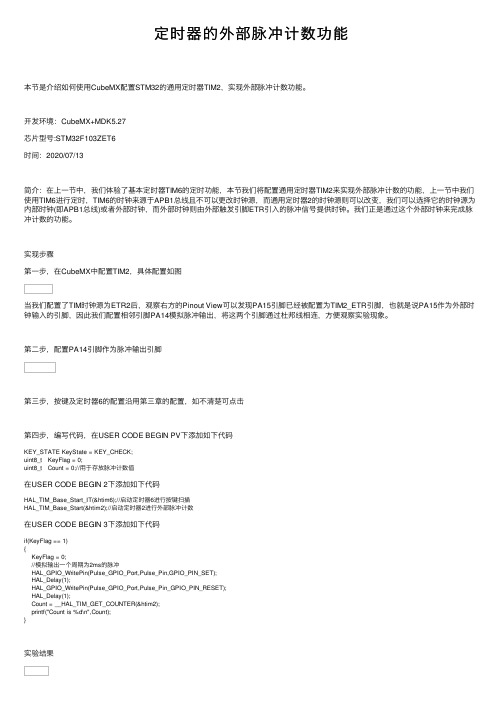
定时器的外部脉冲计数功能本节是介绍如何使⽤CubeMX配置STM32的通⽤定时器TIM2,实现外部脉冲计数功能。
开发环境:CubeMX+MDK5.27芯⽚型号:STM32F103ZET6时间:2020/07/13简介:在上⼀节中,我们体验了基本定时器TIM6的定时功能,本节我们将配置通⽤定时器TIM2来实现外部脉冲计数的功能,上⼀节中我们使⽤TIM6进⾏定时,TIM6的时钟来源于APB1总线且不可以更改时钟源,⽽通⽤定时器2的时钟源则可以改变,我们可以选择它的时钟源为内部时钟(即APB1总线)或者外部时钟,⽽外部时钟则由外部触发引脚ETR引⼊的脉冲信号提供时钟。
我们正是通过这个外部时钟来完成脉冲计数的功能。
实现步骤第⼀步,在CubeMX中配置TIM2,具体配置如图当我们配置了TIM时钟源为ETR2后,观察右⽅的Pinout View可以发现PA15引脚已经被配置为TIM2_ETR引脚,也就是说PA15作为外部时钟输⼊的引脚,因此我们配置相邻引脚PA14模拟脉冲输出,将这两个引脚通过杜邦线相连,⽅便观察实验现象。
第⼆步,配置PA14引脚作为脉冲输出引脚第三步,按键及定时器6的配置沿⽤第三章的配置,如不清楚可点击第四步,编写代码,在USER CODE BEGIN PV下添加如下代码KEY_STATE KeyState = KEY_CHECK;uint8_t KeyFlag = 0;uint8_t Count = 0;//⽤于存放脉冲计数值在USER CODE BEGIN 2下添加如下代码HAL_TIM_Base_Start_IT(&htim6);//启动定时器6进⾏按键扫描HAL_TIM_Base_Start(&htim2);//启动定时器2进⾏外部脉冲计数在USER CODE BEGIN 3下添加如下代码if(KeyFlag == 1){KeyFlag = 0;//模拟输出⼀个周期为2ms的脉冲HAL_GPIO_WritePin(Pulse_GPIO_Port,Pulse_Pin,GPIO_PIN_SET);HAL_Delay(1);HAL_GPIO_WritePin(Pulse_GPIO_Port,Pulse_Pin_GPIO_PIN_RESET);HAL_Delay(1);Count = __HAL_TIM_GET_COUNTER(&htim2);printf("Count is %d\n",Count);}实验结果。
stm32F1外部脉冲计数(库函数实现)
主函数#include ""#include ""#include ""#include ""#include ""#include ""int main(void){u16 t=0;delay_init();`LED_Init();TIM3_PWM_Init(9999,719);TIM2_Excnt_Init(10);OLED_Init();NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);OLED_ShowString(20,0,"EXCNT_TEST",16);OLED_Refresh_Gram();TIM_SetCompare2(TIM3,1000);while(1){delay_ms(1);)t=TIM_GetCounter(TIM2);OLED_ShowNum(20,30,t,6,16);OLED_Refresh_Gram();}}#include ""#include ""#include ""\#include ""void TIM3_PWM_Init(u16 arr,u16 psc){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);//使能GPIO外设和AFIO复用功能模块时钟使能#GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射TIM3_CH2->PB5 //用于TIM3的CH2输出的PWM通过该LED显示//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形= GPIO_Pin_5; //TIM_CH2= GPIO_Mode_AF_PP; //复用推挽输出= GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//GPIO_WriteBit(GPIOA, GPIO_Pin_7,Bit_SET); // PA7上拉= arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值 80K·=psc; //设置用来作为TIMx时钟频率除数的预分频值不分频= 0; //设置时钟分割:TDTS = Tck_tim= TIM_CounterMode_Up; //TIM向上计数模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位= TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2= TIM_OutputState_Enable; //比较输出使能= 0; //设置待装入捕获比较寄存器的脉冲值= TIM_OCPolarity_High; //输出极性:TIM输出比较极性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx>TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR2上的预装载寄存器TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器TIM_Cmd(TIM3, ENABLE); //使能TIMx外设}//定时器2外部脉冲计数函数;void TIM2_Excnt_Init(u16 arr){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);//使能GPIOA和TIM2的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);TIM_DeInit(TIM2);=GPIO_Mode_IN_FLOATING;?=GPIO_Pin_0;=GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructure);=TIM_CKD_DIV1;=TIM_CounterMode_Up;=arr;=0;TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,1 0);~//ExtTRGFilter:外部触发滤波器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
TIM_DeInit(TIM2);
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IN_FLOATING;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟使能
TIM_ITConfig(TIM2,TIM_IT_Update|TIM_IT_CC1,ENABLE);//使能TIM2中断
TIM_SetCounter(TIM2,0);
TIM_Cmd(TIM2,ENABLE);
}
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) != RESET)
{
LED1=!LED1;
TIM_ClearITPendingBit(TIM2, TIM_IT_CC1|TIM_IT_Update);
}
}
#include "usart.h"
#include "oled.h"
void TIM3_PWM_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
主函数
#include "stm32f10x.h"
#include "timer.h"
#include "led.h"
#include "delay.h"
#include "oled.h"
#include "sys.h"
int main(void)
{
u16 t=0;
delay_init();
LED_Init();
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR2上的预装载寄存器
TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的预装载寄存器
TIM_Cmd(TIM3, ENABLE); //使能TIMx外设
NVIC_InitStructure.NVIC_IRQChannelCmd=ENABLE;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1;
NVIC_InitStructure.NVIC_IRQChannelSubPriority=3;
NVIC_Init(&NVIC_InitStructure); //中断优先级设置,抢占优先级为1,响应优先级为3
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //选择定时器模式:TIM脉冲宽度调制模式2
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_Pulse = 0; //设置待装入捕获比较寄存器的脉冲值
TIM_ETRClockMode2Config(TIM2,TIM_ExtTRGPSC_OFF,TIM_ExtTRGPolarity_NonInverted,10);
//ExtTRGFilter:外部触发滤波器。该参数取值在0x0和0xF之间。在我所在的环境下设置为10经检测最准确。
NVIC_InitStructure.NVIC_IRQChannel=TIM2_IRQn;
}
//定时器2外部脉冲计数函数
void TIM2_Excnt_Init(u16 arr)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值80K
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值 不分频
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根据TIM_OCInitStruct中指定的参数初始化外设TIMx
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
TIM3_PWM_Init(9999,719);
TIM2_Excnt_Init(10);
OLED_Init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
OLED_ShowString(20,0,"EXCNT_TEST",16);
OLED_Refresh_Gram();
TIM_TimeBaseStructure.TIM_CounterMode=TIM_CounterMode_Up;
TIM_TimeBaseStructure.TIM_Period=arr;
TIM_TimeBaseStructure.TIM_Prescaler=0;
TIM_TimeBaseInit(TIM2,&TIM_TimeBaseStructure);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5//用于TIM3的CH2输出的PWM通过该LED显示
//设置该引脚为复用输出功能,输出TIM3 CH2的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//GPIO_WriteBit(GPIOA, GPIO_Pin_7,Bit_SET); // PA7上拉
TIM_SetCompare2(TIM3,1000);
while(1)
{
delay_ms(1);
t=TIM_GetCounter(TIM2);
OLED_ShowNum(20,30,t,6,16);
OLED_Refresh_GraБайду номын сангаас();
}
}
timer.c
#include "timer.h"
#include "led.h"
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_TimeBaseStructure.TIM_ClockDivision=TIM_CKD_DIV1;