基于WIFI的智能多功能微型四旋翼飞行器设计
四轴飞行器多功能无线遥控器设计
四轴飞行器多功能无线遥控器设计作者:卞玉丽来源:《软件导刊》2016年第08期摘要:四轴飞行器因其结构简单和飞行性能优越而成为无人机领域的研究热点。
作为一个典型的多变量、非线性系统,在开发过程中其控制参数的取值需反复多次调整,开发一种可扩展、具有多种参数输入方式,同时集数据显示于一体的多功能遥控器显得十分必要。
基于STM32F103C8T6单片机、方向摇杆、电位器、陀螺仪、OLED屏以及无线串口等模块以及FreeRTOS操作系统,开发一个用于四轴飞行器参数设定与显示的遥控器,通过该遥控器能够设定及显示飞行器的P、I、D控制参数、运行方向、油门等,可极大方便四轴系统的开发调试。
关键词关键词:四轴飞行器;无线遥控;STM32;FreeRTOSDOIDOI:10.11907/rjdk.161950中图分类号:TP319文献标识码:A 文章编号:1672-7800(2016)008-0110-030 引言四轴飞行器有4个对称旋翼的直升机,具有能垂直起降、结构简单、操作方便、机动灵活的优点,成为近年来研究的热点[1]。
在开发时有4个电机需要控制,控制器的参数需要反复调整,最直接的方法就是每改变一次控制参数就烧写一次程序,但这样非常低效、繁琐。
于是有人开发出了基于PC机的调试软件,该类调试软件不但可以设定控制参数,还可以实时显示飞行器的各种状态信息,极大方便了开发过程,但这种方案比较适合开发前期初步调试参数时,后期测试就不大方便,因为需要携带电脑,同时通过PC机设定参数及时性也稍差。
虽然市面上有商业遥控器在售,但这些遥控器大多只可以设定参数而无法显示飞行器信息,设定参数的摇杆及按钮的数量及功能较为固定,同时传输协议大都不公开,不便于用户进行二次开发、扩展。
文献[2]开发了一个包含四路摇杆的遥控器,但只可输入参数无法显示参数,使用起来较为不便。
文献[3]中设计的遥控器具有摇杆、电位器、按键输入,以及LCD1602显示功能,但LCD1602功耗高、显示信息有限,同时该遥控器没有惯性器件无法通过捕获手的姿态来控制飞行器。
WiFi环境下的微型四轴飞行器系统设计
WiFi环境下的微型四轴飞行器系统设计钟永熙;吴黎明;张珊珊【摘要】为改善传统四轴飞行器体积大、不便于携带、航模遥控器操作复杂等问题,从易用性的角度出发,提出了基于WiFi控制的微型四轴飞行器设计方案.系统以STM32处理器为核心,MPU6050、HMC5883组成惯性测量单元测量飞行器姿态,上位机通过WiFi与飞行控制器进行数据交互;并引入RT-Thread嵌入式实时操作系统,以满足飞行姿态控制的实时性要求.经实验测试,飞行器能在较短时间内对上位机的操作指令进行响应,并按照指定操作稳定飞行,系统基本完成预期目标.【期刊名称】《单片机与嵌入式系统应用》【年(卷),期】2016(016)011【总页数】5页(P66-70)【关键词】四轴飞行器;飞行控制器;嵌入式实时操作系统;姿态控制【作者】钟永熙;吴黎明;张珊珊【作者单位】广东工业大学信息工程学院,广州510006;广东工业大学信息工程学院,广州510006;广东工业大学信息工程学院,广州510006【正文语种】中文【中图分类】TP272四轴飞行器和传统的飞行器相比,具有机械结构简单、飞行稳定、操控灵活、系统高度智能化等优点,决定其在未来将有着更为广阔的应用前景。
四轴飞行器的设计难点在于多传感器数据融合、姿态控制算法等问题[1]。
常见的四轴飞行器多以无线电遥控作为控制载体,操作复杂,易用性差。
本文设计一种面向室内环境或狭小空间的短距离遥控微型四轴飞行器。
该系统以WiFi作为控制载体,引入嵌入式实时操作系统,具有操作简单、飞行稳定等特点,增大了系统应用的灵活度。
四轴飞行器拥有两对对称的旋翼,对称的一对桨叶旋转方向相同,而相邻的桨叶旋转方向相反。
四只旋翼独立工作,利用相互作用抵消各旋翼的反桨力矩,并分别控制四个旋翼的转速即可改变飞行器的飞行姿态。
姿态用来描述一个刚体的刚体坐标系和参考坐标系之间的角度位置关系,常使用欧拉角来表示,即俯仰角(Pitch)、横滚角(Roll)和航向角(Yaw)。
小型四旋翼低空无人飞行器综合设计

小型四旋翼低空无人飞行器综合设计小型四旋翼低空无人飞行器综合设计一、引言近年来,随着科技的不断发展,无人飞行器成为了航空领域的热门研究课题。
小型四旋翼低空无人飞行器因其灵活性和机动性而备受关注。
本文旨在综合设计一种小型四旋翼低空无人飞行器,并对其关键设计问题进行探讨。
二、设计目标本次设计的小型四旋翼低空无人飞行器的设计目标如下:1. 具备良好的悬停稳定性,能够在低空进行稳定的悬停飞行;2. 具备较高的操控能力,能够完成复杂的机动动作;3. 具备一定的荷载能力,能够搭载各种传感器或设备,以实现不同应用场景的需求;4. 具备良好的安全性,能够应对紧急情况并自动返航。
三、机构设计1. 旋翼设计:选择合适的旋翼叶片尺寸、扭矩和旋翼转速,以实现所需的升力和推力,并保证飞行器的稳定性和机动性。
2. 机身设计:考虑到飞行器的结构强度和重量的平衡,使用轻质且强度高的材料,以实现飞行器的结构刚度和稳定性。
3. 电机设计:根据所需的推力和转速要求,选择合适的电机,并配置相应的驱动和控制系统。
四、控制系统设计1. 姿态控制:采用惯性测量单元(IMU)获取飞行器的姿态信息,通过PID控制算法实现稳定的悬停飞行和精确的操控。
2. 导航系统:利用全球定位系统(GPS)和陀螺仪传感器获取飞行器的位置和速度信息,实现精确的导航和定位。
3. 通信系统:设计一套可靠的数据传输系统,将飞行器采集到的数据传输到地面控制器,并接收指令以实现远程操控。
4. 紧急情况处理:设计一套自主判断机制,当飞行器遇到故障或紧急情况时,能够自动触发返航程序,确保飞行器的安全。
五、能源系统设计1. 电源选择:根据需求选择合适的电池类型和容量,以提供飞行器所需的电力。
2. 能效优化:通过优化电机和电子元件的功耗,减少能源的消耗,延长飞行器的续航时间。
3. 充电系统:设计一套快速充电系统,以提高电池的充电效率和充电速度,减少充电时间。
六、飞行器性能测试设计完成后,对飞行器进行性能测试,验证其实际飞行性能和稳定性。
微型四旋翼飞行器的系统设计
10 | 电子制作 2019年02-03月用“正反桨”,1号和4号电机作为“正桨”,顺时针旋转提供向上的升力,2号和3号电机作为“反桨”,逆时针旋转提供向上升力。
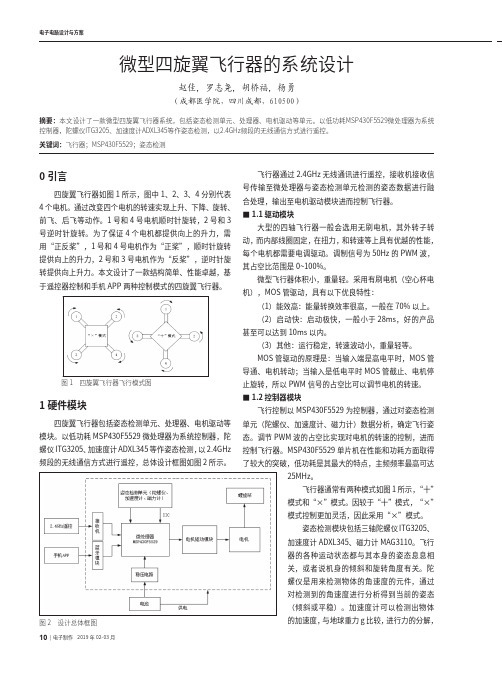
本文设计了一款结构简单、性能卓越,基于遥控器控制和手机APP 两种控制模式的四旋翼飞行器。
图1 四旋翼飞行器飞行模式图1 硬件模块四旋翼飞行器包括姿态检测单元、处理器、电机驱动等模块。
以低功耗MSP430F5529微处理器为系统控制器,陀螺仪ITG3205、加速度计ADXL345等作姿态检测,以2.4GHz 频段的无线通信方式进行遥控,总体设计框图如图2所示。
动,而内部线圈固定,在扭力,和转速等上具有优越的性能,每个电机都需要电调驱动。
调制信号为50Hz 的PWM 波,其占空比范围是0~100%。
微型飞行器体积小,重量轻。
采用有刷电机(空心杯电机),MOS 管驱动,具有以下优良特性:(1)能效高:能量转换效率很高,一般在70%以上。
(2)启动快:启动极快,一般小于28ms,好的产品甚至可以达到10ms 以内。
(3)其他:运行稳定,转速波动小,重量轻等。
MOS 管驱动的原理是:当输入端是高电平时,MOS 管导通、电机转动;当输入是低电平时MOS 管截止、电机停止旋转,所以PWM 信号的占空比可以调节电机的转速。
■1.2 控制器模块飞行控制以MSP430F5529为控制器,通过对姿态检测单元(陀螺仪、加速度计、磁力计)数据分析,确定飞行姿态。
调节PWM 波的占空比实现对电机的转速的控制,进而控制飞行器。
MSP430F5529单片机在性能和功耗方面取得了较大的突破,低功耗是其最大的特点,主频频率最高可达25MHz。
飞行器通常有两种模式如图1所示,“十”模式和“×”模式。
因较于“十”模式,“×”模式控制更加灵活,因此采用“×”模式。
姿态检测模块包括三轴陀螺仪ITG3205、加速度计ADXL345、磁力计MAG3110。
四旋翼微型飞行器设计
四旋 翼 微 型 飞 行 器 设 计
张广 玉 , 张 洪涛 李 隆 球 , 王 , 林
( 哈尔滨工业大学 机 电工程学院 , 黑龙江 哈尔滨 100 ) 50 1
摘 要 : 对 常规 无人飞行 器尺寸较 大 , 针 无法适 用 于 室 内狭 小空 间飞 行 的 问题 , 计 了一 种 四 设
旋翼微 型 飞行 器 . 建立 了微型 飞行 器的动 力 学模 型 , 绍 了组成 飞行 器的 相 关硬 件. 建 了由三轴 介 构
陀螺仪 、 三轴加 速度计 和三 轴磁 力计组 成的姿 态测 量 系统 , 出 了姿 态解算 的 具体 步 骤. 用 了互 给 使
补 滤波 器对 陀螺 测量误 差进行 矫 正 , 并给 出 了互补 滤波 器融合 系数 的确 定方法 . 用基 于欧拉 角反 采 馈 的 PD控制 器进行 姿 态控制 , 需建立 复杂 的控 制 系统 模 型. 飞行 器 最 大尺 寸 1 m, 量 2 I 无 该 5c 重 2 g 可垂 直起 降和 悬停 , 用 于狭 小空 间的侦察任 务. , 适 关键 词 : 四旋翼 ; 型飞行 器 ;姿 态测量 ; 微 互补 滤 波器 ;PD控 制 器 I
s t p T e h r w r f h e il sd s r e .T e at u e me s r me t y t m o ss f r x a y o c p e . h a d a e o e v h ce i e c b d h t t d a u e n s u t i i s e c n i so t a ilg r s o e, t a i
a tix a c e e o tr a d a ti xa g eo t r ra ila c lr mee n ra i lma n tmee .Th t t d lo t m t d i e c b d i ea l A o e at u e a g r h meho sd s r e n d t i. i i i c m— p e n a y fl ri e o c re tt e e r fg r a u e n .Themeh d o ee mi i g t e f so o f ce t l me tr t sus d t o r c h  ̄o so y o me s r me t i e t o fd tr n n h u in c e i n i o o l me a y fle s gv n Th ti d o to y t m s a PI c n r l r b s d o l ra ge e d a k, fc mp e ntr tr i ie . i e at u e c n r ls se i D o tol a e n Eu e n l s fe b c t e wi o tt e n e o c e t o lx mo e fc n r ls se t u h e d t r ae c mp e d lo o to y t m.T e ma i m ie o e v h ce i 5 c n i tr ,a d h h x mu sz ft e i l s1 e tme e s n h t e weg to i h i r ms h ih fwh c s22 g a .Th co Ai hil a ef r v ri a a e f,l n i g a d h v rn e Mir rVe c e c n p ro m etc lt k o a d n n o e g,wh c i ih
微型四旋翼无人机控制系统设计与实现

微型四旋翼无人机控制系统设计与实现微型四旋翼无人机控制系统设计与实现一、引言随着无人机技术的快速发展,微型四旋翼无人机因其体积小、机动性强、操作简单等特点而备受关注。
本文将介绍微型四旋翼无人机的控制系统设计与实现,包括硬件结构设计、飞行控制算法、遥控器与无人机的通信以及飞行状态监测等方面的内容。
二、硬件设计微型四旋翼无人机的硬件结构由四个电机和相应的螺旋桨组成,同时还包括飞控、电池、传感器和通信模块等。
电机通过螺旋桨产生推力,控制无人机的飞行方向和姿态。
飞控是无人机的大脑,通过接受传感器数据并进行计算,控制电机输出相应的信号以实现飞行任务。
虽然整个系统设计较为复杂,但由于无人机体积小,所以硬件结构相对较简单。
三、飞行控制算法微型四旋翼无人机的飞行控制算法通常包括姿态控制和高度控制两部分。
姿态控制通过测量无人机的姿态角度,并计算出所需的姿态角度偏差,然后通过PID控制器调整电机的转速,从而实现姿态的稳定控制。
在姿态控制的基础上,高度控制通过测量无人机的高度,并计算出所需的高度偏差,然后通过PID控制器控制推力大小来调整飞行高度。
四、遥控器与无人机的通信遥控器是无人机和操作员之间的重要媒介,通过遥控器操作,操作员可以实现对无人机的遥控飞行。
遥控器通过无线通信方式与无人机进行数据的传输,包括指令的发送和无人机状态的接收。
在通信方面,常用的方式有无线电通信和蓝牙通信,通过指令的传输和接收,操作员可以实时了解无人机的状态,从而对无人机进行精确的操作和控制。
五、飞行状态监测飞行状态监测是无人机飞行过程中的重要环节,通过监测无人机的各项指标来实时反馈无人机的飞行状态。
常见的监测指标包括无人机的姿态角度、高度、速度、电池电量等,这些指标可以通过传感器的测量得到。
操作员通过监测无人机的飞行状态,可以及时调整飞行控制算法参数,以确保无人机的顺利飞行。
六、结论通过本文的介绍,我们对微型四旋翼无人机的控制系统设计与实现有了初步的了解。
四旋翼飞行器设计方案
四旋翼飞行器设计方案四旋翼飞行器设计方案一、项目背景为了满足近年来快递、悬停摄影、新闻采集等领域对于无人机需求的不断增加,我们设计了一款四旋翼飞行器。
该飞行器具有稳定、灵活、高效的特点,可广泛应用于各种领域。
二、设计要求1. 飞行器稳定性要求高,能够在不同天气和环境条件下稳定飞行2. 飞行器的机动性要好,能够完成各种复杂动作3. 飞行器具有自主导航、避障和悬停等功能4. 飞行器的载荷能力要较强,能够携带相机等设备进行悬停摄影和新闻采集5. 飞行器的续航能力要长,能够在一次充电之后持续飞行时间较长三、设计方案1. 结构设计:a. 飞行器采用四旋翼结构,旋翼通过电机、螺旋桨和转子连接器连接。
b. 飞行器机体由轻质材料制成,以减轻整体重量。
c. 飞行器具有折叠设计,方便携带和存放。
2. 稳定性设计:a. 飞行器配备三轴陀螺仪和加速度计,能够实时感知飞行姿态,保持平稳飞行。
b. 飞行器的旋翼具有可调节桨叶角度的功能,能够在飞行时根据需要调整旋翼的角度,提高飞行稳定性。
3. 机动性设计:a. 飞行器的旋翼速度可调节,能够实现前进、后退、上升、下降、转弯等各种动作。
b. 飞行器配备高精度数传遥控系统,能够精确控制飞行器的动作,保证飞行器的机动性。
4. 功能设计:a. 飞行器配备GPS导航系统,能够实现自主导航功能,能够根据预设的路径自动飞行。
b. 飞行器配备避障传感器,能够感知前方障碍物,自动避开,确保安全飞行。
c. 飞行器具有悬停功能,能够在空中静止悬停,保持稳定飞行。
5. 载荷能力设计:a. 飞行器结构坚固,能够承载相机等设备进行悬停摄影和新闻采集。
b. 飞行器具有电池可更换设计,能够根据需要调整电池数量,提高载荷能力。
6. 续航能力设计:a. 飞行器采用高效能源管理系统,能够在一次充电之后持续飞行时间较长。
b. 飞行器具有低能耗设计,能够减少能源消耗,延长飞行时间。
四、总结通过以上设计方案,我们设计出了一款稳定、灵活、高效的四旋翼飞行器。
基于无线遥控技术的四旋翼飞行器控制系统设计
基于无线遥控技术的四旋翼飞行器控制系统设计朱海荣;张鹤鸣;郭浩波【摘要】作为微型无人机的一种,四旋翼飞行器以其简单的机械结构和优越的飞行性能成为科学研究领域中空中机器人的热点之一。
文章以四旋翼飞行器为主要研究对象,以四元数理论为基础,推导了飞行器姿态解算算法;利用MEMS技术和嵌入式技术,开展基于无线遥控技术的四旋翼飞行器的硬件设计;运用VRML语言建立四旋翼3D模型,利用LabVIEW软件对该模型进行图像处理和显示,并在与飞行器远程通信的基础上,完成了其作为地面站的主要功能。
测试结果表明,系统硬件工作稳定,姿态解算准确,控制算法很好地满足了控制要求,飞行器的稳定性和响应特性较为理想。
%As a kind of miniature UAVs, four-rotor aircraft has become one of the hottest areas of scientific research in the air robot due to its simple mechanical construction and superior flight performance. This paper conducts algorithm for this aircraft posture by taking four-rotor aircraft as the main object and based on quaternion theory. The authors use of MEMS technology and embedded technology, wireless remote control technology to carry out a four-rotor design is based on hardware; use VRML language the establishment of four rotor 3D model, and the model of LabVIEW software for image processing and display, and this paper completed its primary function as a ground station on the basis of remote communication with the aircraft. The test results show that the system hardware is stable, accurate, solver attitude control algorithm, and it satisfies the control requirements, stability and responsiveness of the aircraft.【期刊名称】《南通职业大学学报》【年(卷),期】2015(000)002【总页数】5页(P86-90)【关键词】四旋翼飞行器;姿态解算;四元数;VRML语言;LabVIEW【作者】朱海荣;张鹤鸣;郭浩波【作者单位】南通大学电气工程学院,江苏南通 226019;南通大学电气工程学院,江苏南通 226019;南通大学电气工程学院,江苏南通 226019【正文语种】中文【中图分类】V249.1;TP274图1 飞行器的整体结构图2 遥控器总体结构1 系统硬件设计1.1飞行控制板的硬件设计飞行器的整体结构如图1所示。
小型四旋翼无人机组机方案设计

一、小型四旋翼无人机总体架构典型的小型四旋翼无人机,一般由机械部分(机架),动力部分(包括电机、电子调速器、电调连接板、桨叶、电池),电子部分(包括飞控板、通信模块、遥控器接收机、PPM编码板)组成。
(一)机械部分机架考虑到编队飞行对实验室空间的要求,希望机架能够尽量的小。
根据与蔡国伟老师对电机与桨叶(后文提到)的搭配进行讨论后,决定将机架的大小设定为轴距255mm,边距180mm(由6寸桨的大小决定)。
1,底板 2,中间机架板 3,顶板整个机体由底板、中间机架板、顶板连接而成(通过尼龙螺柱和螺丝);底板安置电池、xbee模块、遥控器接收机、电调连接板,中间机架板安置4个电调、pixhawk飞控板,顶板用于安置定位系统标记点(同时起到保护、隐藏pixhawk 飞控板及走线的作用);为便于安装,所有开孔、镂空均根据拟选器件匹配设计;拟采用碳2mm厚3K纤维板加工。
另设计四个保护罩如下(可用于避免桨叶受损或伤人):4,保护罩(二)动力部分(1)电机一般而言,小型四旋翼无人机(轴距250mm左右)选用KV2000左右(配5-6寸桨)的电机。
经过对比讨论后,拟选用飓风D2206 KV1900无刷直流电机(配6寸桨)。
之所以选用这款电机是因为这款电机能够提供较大的拉力,同时该电机的工作电流处在一个比较小的区间,单个电机重量仅为27.5g。
飓风D2206 KV1900参数表飓风D2206 KV1900实物图(2)电子调速器电子调速器用于驱动无刷直流电机,比较重要的参数是工作电流,刷新频率,重量。
一般而言,市面上可售的大部分电子调速器的刷新频率都大于400hz,符合要求。
根据上文所选电机的工作电流,综合考虑重量要求,与蔡国伟老师沟通后,拟选用好盈XRotor-10A电子调速器。
好盈XRotor系列电子调速器参数表好盈XRotor-10A电子调速器实物图(3)电调连接板电调连接板,其本质为一块电源配电板,用于简化电池与电调、电调与飞控之间的电气连接,同时可以避免导线拆装时的反复焊接。
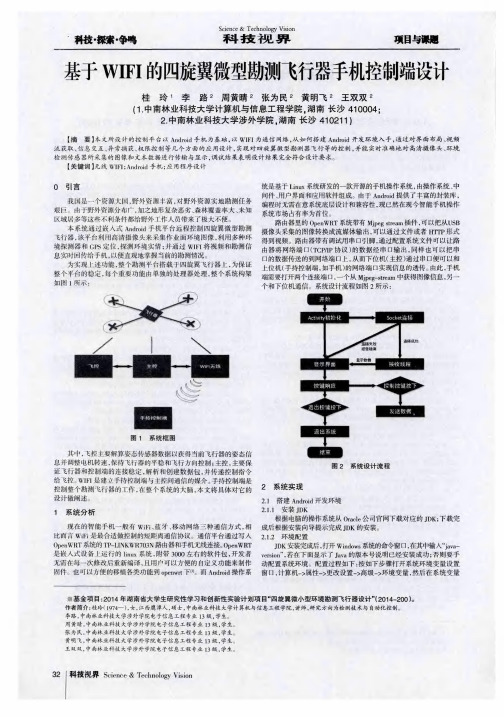
基于WIFI的四旋翼微型勘测飞行器手机控制端设计
基于WIFI的四旋翼微型勘测飞行器手机控制端设计【摘要】本文所设计的控制平台以Android手机为基础,以WIFI 为通信网络,从如何搭建Android开发环境入手,通过对界面布局、视频流获取、信息交互、异常捕获、权限控制等几个方面的应用设计,实现对四旋翼微型勘测器飞行等的控制,并能实时准确地对高清摄像头、环境检测传感器所采集的图像和文本数据进行传输与显示,调试结果表明设计结果完全符合设计要求。
论文关键词:无线WIFI,Android 手机,应用程序设计我国是一个资源大国,野外资源丰富,对野外资源实地勘测任务艰巨。
由于野外资源分布广,加之地形复杂恶劣、森林覆盖率大、未知区域居多等这些不利条件都给野外工作人员带来了极大不便。
本系统通过嵌入式Android手机平台远程控制四旋翼微型勘测飞行器,该平台利用高清摄像头来采集作业面环境图像,利用多种环境探测器和GPS定位,探测环境实情;并通过WIFI将视频和勘测信息实时回传给手机,以便直观地掌握当前的勘测情况。
为实现上述功能,整个勘测平台搭载于四旋翼飞行器上,为保证整个平台的稳定,每个重要功能由单独的处理器处理,整个系统构架如图1所示:其中,飞控主要解算姿态传感器数据以获得当前飞行器的姿态信息并调整电机转速,保持飞行器的平稳和飞行方向控制;主控,主要保证飞行器和控制端的连接稳定,解析和创建数据包,并传递控制指令给飞控。
WIFI是建立手持控制端与主控间通信的媒介。
手持控制端是控制整个勘测飞行器的工作,在整个系统的大脑,本文将具体对它的设计做阐述。
1 系统分析现在的智能手机一般有WiFi、蓝牙、移动网络三种通信方式,相比而言WiFi是最合适做控制的短距离通信协议。
通信平台通过写入OpenWRT系统的TP-LINKWR703N路由器和手机无线连接。
OpenWRT 是嵌入式设备上运行的linux系统,附带3000左右的软件包,开发者无需在每一次修改后重新编译,且用户可以方便的自定义功能来制作固件。
基于WiFi的微型四旋翼飞行器设计
闭环 P I D控 制等 , 设 计 出一款 基 于 Wi F i 的微 型 四旋翼 飞行 器。详 细 阐述 了该 系统 构成 、 硬 件 设计 与软件 设计 。 实践表 明 , 飞 行 器机 身采 用 “ X” 型设 计 , 软件 系统 采 用四 元数 、 双 闭环 P I D控 制等 , 其 飞行稳 定性 高、 可控 性好 、 转 向更 灵 活。
De s i gn o f Wi Fi - b a s ed Mi n i Fo u r Ro t or Ai r c r a f t
FU Ch a n g. y o u’
,
C AI Ho n g— b i n ,
L I Ha n g‘
,
XI E We i 。
Ch e n g d u 6 1 0 0 5 4,C h i n a )
Ab s t r a c t :I n o r de r t o f u r t h e r i mp r o v e t h e s t a bi l i t y, s t e e in r g f l e x i bi l i t y a n d c o n t r o l l a b i l i t y o f mi n i f o ur — r o t o r a i r c r a f t
关 键词 : 四 旋翼 飞行 器 ; 微 型; Wi F i ;多种 传 感 器 ;四 元 数 ; P I D 中图分 类号 : V 2 4 9 . 1 2 2 . 2 文献标 志码 : A
文章 编号 : l 0 0 6—7 1 6 7 ( 2 0 l 6 ) l 0—0 l 1 7— 0 4
S SN 1 与
探
索
第3 5卷 第 1 0期
基于WIFI的四旋翼微型勘测飞行器手机控制端设计
@ Override
整个布局 以 RelativeLayout(相对 布局 )为父 本 ,在 其 中分 别放置 子控件 Button(按键控件)、ImageView(图片控件 )和 TextView(文本控件 ),
public void onClick(View argO){
//TODO Auto—generated method stub
<Button
码将会被调用 。
andr oid:id=”@+id/button fr o nt” _
2.5.2 获取输人流和输出流
android:layoutwidth=”wrap content”
_
_
新建一个 Socket连接 ,此连接用来和下位机串 口l司数 据透传 。依
andr oid:layoutheight=”w r ap content”
Project一>Next,根据新建工程 向导设 置应 用名 、工程 名 、包 名和应用程 2.5.1 绑定按键
序 图标等 ,所有需要 设置的设置完成 之后点击 Finish完成 ,至此应用
在 MainActivity.cla ss的 onCreate方 法里为控件绑定监 听器 ,这样
程序的新 建已经完成 。
Activity退 出时会调用 onDestroy方法 。通常在 onCreate方法里进行按
2.2 新建 Android应用程序
键 绑定 、变量初始 化等一系列 Activitv初始化操作 ,而在 onDestrov方
在 Eclipse项 目管理窗El点击右键 ,依次 New->Android Applieati0n 法里释放资源 。
件在父本 中的位置 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于WIFI的智能多功能微型四旋翼飞行器设计
摘要:本文基于WIFI无线传输技术,通过建立四旋翼飞行器的空气动力数学模型,结合实际需求分析,通过单片机总控,各功能模块有机整合,优化软硬件设计,完成最终制作调试,实现飞行器的自由巡航、悬停、降落和视频探测等功能,达到了预期设计目标。
关键词:WIFI;四旋翼;飞行器
1.引言
四旋翼飞行器是一种可以实现垂直起降的旋翼式无人飞行器,具有操控简单,体积小,机动性强,启动快,方便拍摄等优点,能及时地将诸如地震、矿难等特殊现场第一手资料传送回控制中心,帮助我们了解现场状况并作出正确判断[1]。
国外对旋翼式飞行器的研究较多且较深入,我国在该领域的研究起步较晚,成果相对较弱,并且侧重点有所不同,有的侧重数学建模,有的侧重自动控制与研发等等[2]。
本文于是针对自然灾害等特殊现场设计了一种基于WIFI的智能多功能四旋翼飞行器,采用独立控制的四旋翼,升力更大,同时可狭小空间内起降,还具有机械结构简单、机动灵活、操控性高及成本低等优势。
2.建立动力学模型
2.1 坐标变换
四旋翼飞行器的四个旋翼都高速旋转,其所受的空气动力比较复杂,要建立非常准确的空气动力学模型比较困难,为了简化四旋翼飞行器的数学模型,可忽略其弹性形变[3]。
为了相对准确的描述飞行器运动状态,建立三维数学坐标系,也叫机体坐标系。
OX轴指向地平面方向,由右手定则确定OY轴和OZ轴的方向。
用原点O表示飞行器的重心,则OX轴指向飞行器的前方,OY轴指向飞行器的右方,OZ轴指向飞行器的上方。
地面三维坐标系与机体坐标系之间存在三个欧拉角:偏航角ψ(沿Z轴方向)、滚动角φ(沿X轴方向)和俯仰角q(沿Y轴方向)。
两个坐标系之间的关系如下:
,,(1)
可进一步的转换矩阵得:
(2)
经计算可得如下坐标转换公式:
(3)
经过坐标转换后对其进行数学建模则相对简单。
2.2 建立数学模型
该飞行器在机体坐标系下的受力可表示为[4]:
(4)
转移到地面坐标系上的线位移运动方程可表示为:
(5)
因该飞行器飞行速度相对较低,则空气阻力系数可以忽略不计。
由欧拉方程可得角度运动方程可表示为:
(6)
解方程化简可得:
(7)
为计算方便,做以下定义:
(8)将公式(8)与(2)合并即得四旋翼飞行器的运动方程即其数学模型:
(9)
3.硬件设计
各部分的电路设计包括:主控模块、驱动模块、通信模块、电源模块等。
3.1 主控模块
主控电路是以STC89S52为核心组成,可通过编程控制外围各种电路和元器件的工作。
STC89S52具的FLASH存储器、RAM,定时器、外部中断等方便使用,且价格适中,性价比高[5]。
3.2 驱动模块
选用L298N电流电机驱动模块,其工作电压高,输出电流最大可达3A,持续工作电流2A,额定工作频率25W。
内含高电压电流全桥式驱动器,采用标准
逻辑电平信号控制,控制直流电机更加简单容易。
该驱动模块使用光耦将电压与信号电压分隔,增强了可靠性。
3.3 通信模块
通信模块主要完成信号转换功能,由作为主控芯片的MAX232组成,将RS232信号转换为TTL信号,实现单片机与路由器之间的通信。
其工作稳定,转换精度高且功率低价格便宜。
3.4电源模块
飞行器通过可充电锂电池供电,电池电源由L7805稳压芯片调节电压,内部含调整管、过热及过流保护,可靠性好,所需外围元件少,且成本较低。
完成电池的供电电压平稳,使飞行器状态稳定。
4.软件设计
四旋翼飞行器的控制部分的作用主要体现在控制飞行器的巡航、起飞、降落、悬停等几个方面,控制模块通过采集角速度的反馈参数来调整各个电动机的转速实现飞行姿态的变化。
四旋翼的电机驱动性能的好坏及正常工作与否直接决定了飞行器的起飞质量。
主要控制策略为:首先设置电机启动参数,当电机收到驱动信号时启动,并通过传动装置带动四副旋翼旋转,当需改变飞行姿态,即改变旋翼转速时,电动机则按收到的反馈信号改变转速实现飞行姿态的改变。
5.结论
完成硬件组装及软硬件综合测试后,通过试飞获得该基于飞行器的主要飞行参数为:飞行高度为0-100m,自重1kg,飞行速度0-36km/h,载重0-1.5kg,有效控制距离约320m。
如图2所示,飞行器各项参数性能良好,达到了预期设计目标,证实了其具有较高理论研究意义和实用价值,在军民用领域应用前景广泛。
图2四旋翼飞行器
参考文献:
[1]王俊生.四旋翼蝶形飞行器控制器系统设计与控制方法研究[D].国防科学技术大学,2007,(11).
[2]杨庆华,宋召青,时磊.四旋翼飞行器建模,控制与仿真.海军航空工程学院学报.2009,(9).
[3]胡宇群.微型飞行器中的若干动力学问题研究[D].南京:南京航空航天大
学,2002.
[4]申安玉,申学仁,李云宝.自动飞行控制系统.国防工业出版社.2003,(5)
[5]范立南,谢子殿主编.单片机原理及应用教程[M].北京:北京大学出版社,2006 ,(2).。