微型计算机控制技术试卷
微型计算机控制技术 试卷16答案
计算机控制技术参考答案一、(每空1分)1.操作指导控制系统、直接数字控制系统、监督控制系统、集散控制系统、现场总线控制系统;2.汇编;3.PC总线、STD总线、VME总线、多总线:4.中断;5.O.OO5V:6.比例系数、积分时间、微分时间;7.4;&无源、有源;9.数字滤波、模拟滤波。
二、(每空2分)l.B, 2.A, 3.D, 4.D, 5.B。
三、I.共模干扰是指同时加到计算机控制系统两个输入端上的公有的干扰电压(3 分)0措施有:采用共模抑制比高的、双端输入的运算放大器做被测信号的前置放大器(1分);采用光电耦合器或隔离变压器(1分);采用隔离放大器(1分)。
2.在PID增量式算法中,当采样周期较小,而积分时间常数较大时,积分项很可能小于计算机的最低有效值,在运算时被计算机取整而舍掉,于是积分项实际上不起作用。
(2分)防止方法:(1)扩大计算机运算字长;(2分)(2)积分项单独累加,直到产生溢出,将溢出值作为积分项,并视偏差值正负,加到控制输出值,或从控制输出值中减去,从而实现积分作用,余数保留下来,作为下一步累加的基数。
(2分)弘)=四=(s + 2) = . s + 2四、(2分)E(s) (s + 3) (s + 1) s~ + 4s + 3s2U(s) + 4sU(s) + 3U(s) = sg + 2E(s); (2 分)d~u{t) . du{t) 今,八deQ)小八、———+ 4 ----- + = ---- + 2e(t): (2 分)dr dt dt- 2u(k - 1) + u(k - 2) 一u(k - 1) , M e{k) - e(k - 1)了、------------ + 4 --------------- + 3〃以)= + 2e{k)------------3T-------------- T;(2 分)整理后可得:〃以)_ 6u (k — 1) — u{k — 2) + 3*k ) — e (k — 1).(2 分) 五、=2 (2 分),T, = 0. 17 (2 分)d = l,w = l,y = LJ=l ,a = l,且J=g,有(2分) p = w + d = 2 — E (z ) =l+J Z -' + £Z -2 (2 分)Z = v-j + ^ = l —> F 2(z ) = (2 分) 叱(Z ) = 1 - 0(z ) =(1-Z-* )(1+/, Z _,+ f 2z 2 )( 2 分)0(z ) = (l + O.lz-,)m 1z-2 (2 分)/i = 1, £ = 0.09 ,m x = 0.9 (2 分)W Z ) = 0.9(1 + 0.U )Z -2七、单缓冲接线5分,单极性电压输出接线5分,输出电压接线5分,地址线6分 位置式: n 9 点)= 2"+邙次G )] (4分) 增量式: ()2 ")=知+萨赫)f (J )(4分) o.2z-2(i+o.ir') 八、G (Z )=(]_Z _I )(]_O .3Z _I )。
微型计算机控制技术试卷B

微型计算机控制技术试卷B一、选择题(本题共10小题,每小题 1.5分,共15分)1. 防止抖动是能否正确读取键值的必要环节,实现方法是( A)。
A.可以用硬件电路或软件程序实现B.只能用滤波电路或双稳态电路实现C.只能用软件程序实现D.只能用延时程序实现2. LCD显示的关键技术是解决驱动问题,正确的作法是(D )。
A.采用固定的交流电压驱动 B.采用直流电压驱动C.采用交变电压驱动 D.采用固定的交变电压驱动3. 小功率直流电机控制控制系统中,正确的作法是(B )A.改变定子上的通电极性,以便改变电机的转向B.改变转子上的通电极性,以便改变电机的转向C.在定子上通以交流电,电机可周期性变换转向D.在转子上通以交流电,电机可周期性变换转向4. 在实际应用中,PID调节可根据实际情况调整结构,但不能( D)。
A.采用增量型PID调节 B.采用带死区的PID调节C.采用PI调节 D.采用I D调节5. 若用4位共阳极LED和74LS04构成光报警系统,使最高位发光其余位不发光的报警模型是(A)。
A.1000B B.0001B C.1111B D.0000B6. 关于ADC0809中EOC信号的描述,不正确的说法是(D )。
A. EOC呈高电平,说明转换已经结束B. EOC呈高电平,可以向CPU申请中断C. EOC呈高电平,表明数据输出锁存器已被选通D. EOC呈低电平,处于转换过程中7. 采样/保持器的逻辑端接+5V,输入端从2.3V变至2.6V,输出端为(A )。
A.从2.3V变至2.6V B.从2.3V变至2.45V并维持不变C.维持在2.3V D.快速升至2.6V并维持不变8. 计算机监督系统(SCC)中,SCC计算机的作用是(B )A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关9. 键盘锁定技术可以通过( C)实现。
微型计算机控制技术B卷答案
B卷答案和评分标准一、填空(每小题1分,共15分)1.计算机控制系统由 CPU 及操作台、 I/O 接口与通道、信号检测及变送、通用外围设备及被控对象组成。
2.计算机控制系统的设计包括系统总体控制方案设计、微型计算机选择、控制算法设计、硬件设计、软件设计和系统联调六个步骤组成。
3.数字控制器的模拟化设计方法中,离散化方法包括差分变换法、零阶保持器法和双线性法。
4.常用的数字滤波算法主要有算数平均值滤波、中值滤波、一阶滞后滤波、程序判断滤波等四种。
5.模拟量输入通道由信号处理装置、采样保持单元、放大器、 A/D转换器、控制电路几个部分组成。
二、简答题(共40分)1.连续控制系统相比,计算机控制系统具有哪些特点?(12分)答:与连续控制系统相比,计算机控制系统具有以下特点:(1)计算机控制系统是模拟和数字的混合系统。
(2分)(2)在计算机控制系统中,控制规律是由计算机通过程序实现的(数字控制器),修改一个控制规律,只需修改程序,因此具有很大的灵活性和适应性。
(2分)(3)计算机控制系统能够处理模拟、离散模拟、离散数字等多种信号形式。
(2分)(4)计算机控制系统并不是连续控制的,而是离散控制的。
(2分)(5)一个数字控制器经常可以采用分时控制的方式,同时控制多个回路。
(2分)(6)采用计算机控制,如分级计算机控制、集散控制系统、计算机网络等,便于实现控制与管理一体化,使工业企业的自动化程度进一步提高。
(2分)2.进入I/O通道的干扰按其对电路的作用形式通常分为哪两种?对每种干扰应采取哪些抑制措施?(6分)答:分为串模干扰和共模干扰(3分);串模干扰可采用加入滤波器;用屏蔽线;在传感器位置进行信号放大;数字滤波来削弱干扰;共模干扰可采用高共模抑制比的潜质放大器;光电隔离;隔离放大器等形式削弱干扰。
(3分)3.简述大林算法的设计准则。
振铃现象是如何产生的?如何利用大林算法消除振铃?(6分)答:准则:以大林算法为模型的数字控制器,使闭环系统的特性为具有时间滞后的一阶惯性环节,且滞后时间与被控对象的滞后时间相同。
微型计算机控制技术最新版试卷及参考答案试卷13
(-学年第 学期) A 卷■/B 卷□课程名称 计算机控制技术 开课学院 电气学院使用班级 考试日期大学试题第2页大学试题第3页大学试题第4页计算机控制技术答案和评分标准一、填空题(每空1分)1.0.02v ;2.PC 总线,STD 总线,VME 总线,多总线;3.过程,运动;4.逐次逼近,双积分;5.程序,中断,DMA ;6.无源,有源;7.积分,微分;8.0.72,0.98;9.-5—0;10.12.5 二、选择题(每题2分) 1.C ;2.B ;3.A ;4.B ;5.D 三、简答题 1.答:能控条件:(3分)能观条件:(3分)2.答:对不同输入类型的适应性差(2分);对被控对象参数变化过于敏感(2分);控制作用易超出限制范围(2分)。
四、342)1)(3()2()()()(2+++=+++==s s s s s s s E s U s D ;(2分) )(2)()(3)(4)(2s E s sE s U s sU s U s +=++;(2分) )(2)()(3)(4)(22t e dt t de t u dt t du dtt u d +=++;(2分) )(2)1()()(3)1()(4)2()1(2)(2k e T k e k e k u T k u k u Tk u k u k u +--=+--+-+--;(2分)整理后可得:8)1()(3)2()1(6)(--+---=k e k e k u k u k u ;(2分)五、(1)、s T s s s D i )1)(1()(21++=ττ其中41=τ,32=τ(2分))122(21)12(10)()()(22+=+==s T s T s s T s G s D s G i c (1分)⎪⎪⎩⎪⎪⎨⎧=⇒==82222222i iT T T T (2分) 得:s s s s D 8)13)(14()(++=(2分)(2)、872321321=+=s s s s s s P k k k T T T K (1分),721=+=s s I T T T (1分),7122121=+=s s s s D T T T T T (1分)用差分法离散可得:)2()1()()1()(210-+--+-=k e a k e a k e a k u k u (2分)其中:)1(0T T T T K a D I P ++=,)21(1T T K a D P +=,TTK a D P =2。
微型计算机控制技术

微型计算机控制技术一、单选题1.某控制系统中,希望快速采样,保持器的保持电容CH 应取值()。
A、比较小B、比较大C、取零值D、取负值答案:A2.在8086CPU的标志寄存器中,控制标志位占( )A、3位B、9位C、4位D、16位答案:A3.计算机的内存可采用()A、RAM和ROMB、RAMC、ROMD、磁盘答案:A4.某计算机的主存为3KB, 则内存地址寄存器需()位就足够了。
A、10B、11C、12(4k-2*12)D、13答案:C5.下列各个环节中,不属于数字量输入通道的是()A、调理电路B、锁存器C、译码器D、I/V 变换电路答案:D6.在读总线周期中,CPU从数据总线上读取数据是在()A、T4状态的下降沿B、T4状态的上升沿C、T3状态的下降沿D、T3状态的上升沿答案:B7.8086CPU 系统主存储器以()为单位编址A、字节B、字C、双字D、八字节答案:A8.在查询传送方式,CPU要对外设进行读出或写入操作前,必须先对外设()A、发控制命令B、进行状态检测C、发I/0端口地址D、发读/写命令答案:B9.键盘锁定技术可以通过()实现。
A、设置标志位B、控制键值锁存器的选通信号C、A 和B 都行D、定时读键值答案:C10.CPU 在数据线上传输的信息可能是()A、数据B、状态C、命令D、以上都是答案:D11.通常计算机系统中的外围设备是指()A、外存储器、输入设备、输出设备B、外存储器、输入设备C、外存储器、输出设备D、输入设备、输出设备答案:A12.监督控制系统中的SCC 计算机计算出()送给模拟调节器或DDC 计算机。
A、最优控制值B、最优给定值C、最少拍数D、最优测量值答案:B13.输出信号属于模拟信号的装置是()A、感应开关B、行程开关C、角度编码器D、压力变送器答案:B14.8086CPU在执行IN AL,DX 指令时,DX寄存器的内容输出到()上。
A、地址总线B、数据总线C、存储器D、寄存器答案:A15.8086 最小工作模式和最大工作模式的主要差别是()A、地址总线的位数不同B、I/O 端口数不同C、数据总线位数不同D、单处理器与多处理器的不同答案:D16.在高精度、慢过程且干扰严重的恒值调节系统中,可采用()A/D 转换器。
微型计算机控制技术试卷c
微型计算机控制技术试卷C一、选择题(本题共10小题,每小题 1.5分,共15分)1. DAC0832的VREF接-5V,IOUT1接运算放大器异名端,输入为1000000B ,输出为()。
A. +5VB. +2.5VC. -5VD. -2.5V2. 采用ADC0809构成模拟量输入通道,ADC0809在其中起()作用。
A. 模拟量到数字量的转换B. 数字量到模拟量的转换C. 模拟量到数字量的转换和采样/保持器D. 模拟量到数字量的转换和多路开关3. 系统采用程序判断滤波,实验发现总有一些杂波残留,原因是()。
A.取样次数太少B.△Y取值太大C.△Y取值太小D.相邻两次采样值间的差小于△Y4. 当键盘与单片机间通过INT0中断方式接口时,中断服务程序的入口地址是2040H,只有()才能正常工作。
A.把2040H存入0003H B.把2040H存入000BHC.把AJMP 2040H的机器码存入0003HD.把AJMP 2040H的机器码存入000BH5. 在PID调节系统中,若想增强微分作用,正确的作法是()。
A.加大系数T I B.加大系数K PC.加大系数K I D.加大系数T6. 在计算机控制系统中,T的确定十分重要,原因是()。
A.T太大,系统精度不够B.T太大,积分作用过强C.T太小,微分作用太强D.T太小,积分作用过弱7. 在计算机交流电机控制系统中,需要解决的问题是()。
A.将交流变成直流后并放大B.将直流变成交流后并放大C.设单向开关,使直流电通过并放大D.设双向开关,使交流电通过并放大8. 在微型机控制系统中的模拟量输出通道中,最关键的器件是( )。
A.多路开关 B. 光电隔离器C.A/D转换器D.D/A转换器9. 若系统中采样保持器的保持电容值比较小,则其()。
A.采样速度快但保持性能差B.采样速度及保持性能与电容值无关C.采样速度慢但保持性能好D.采样速度及保持性能只与电压有关10.RS—232C的电气特性规定使用( )。
(完整版)微型计算机控制技术试卷b
微型计算机控制技术试卷B一、选择题(本题共10小题,每小题 1.5分,共15分)1. 防止抖动是能否正确读取键值的必要环节,实现方法是()。
A.可以用硬件电路或软件程序实现B.只能用滤波电路或双稳态电路实现C.只能用软件程序实现D.只能用延时程序实现2. LCD显示的关键技术是解决驱动问题,正确的作法是()。
A.采用固定的交流电压驱动B.采用直流电压驱动C.采用交变电压驱动D.采用固定的交变电压驱动3. 小功率直流电机控制控制系统中,正确的作法是()A.改变定子上的通电极性,以便改变电机的转向B.改变转子上的通电极性,以便改变电机的转向C.在定子上通以交流电,电机可周期性变换转向D.在转子上通以交流电,电机可周期性变换转向4. 在实际应用中,PID调节可根据实际情况调整结构,但不能()。
A.采用增量型PID调节B.采用带死区的PID调节C.采用PI调节D.采用I D调节5. 若用4位共阳极LED和74LS04构成光报警系统,使最高位发光其余位不发光的报警模型是()。
A.1000B B.0001B C.1111B D.0000B6. 关于ADC0809中EOC信号的描述,不正确的说法是()。
A. EOC呈高电平,说明转换已经结束B. EOC呈高电平,可以向CPU申请中断C. EOC呈高电平,表明数据输出锁存器已被选通D. EOC呈低电平,处于转换过程中7. 采样/保持器的逻辑端接+5V,输入端从2.3V变至2.6V,输出端为()。
A.从2.3V变至2.6V B.从2.3V变至2.45V并维持不变C.维持在2.3V D.快速升至2.6V并维持不变8. 计算机监督系统(SCC)中,SCC计算机的作用是()A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关9. 键盘锁定技术可以通过()实现。
微型计算机控制技术 试卷15答案

计算机控制技术参考答案一、填空题(每空1分)1.0.02V;2.网络化,集成化,智能化,标准化;3.过程,运动;4.逐次逼近式,双积分式;5.查询式,中断,DMA;6.负载共电源,负载共地;7.积分作用丢失,积分饱和;8.程序判断滤波,一阶惯性滤波,算术平均滤波:9.实时控制二、选择题(每题2分)I.C; 2.B: 3.A; 4.D; 5.B三、简答题1.答:串模干扰是一种叠加在被测信号上的干扰信号。
(3分)消除串模干扰的方法:(1)采用带屏蔽层的双绞线或同轴电缆做信号引线来连接传感器和转换设备<■ (I分)(2)采用滤波的方法。
(1分)(3)可以先对被测信号进行前置放大,这样可以提高回路的信噪比,然后再利用逻辑器件的特性来抑制干扰。
(1分)2.答:控制量输出超过了实际执行机构所能输出的极限值,称为积分饱和。
(2分)(1)遇限削弱积分法;(2分)(2)积分分离法o (2分)四、K P=3 (2 分),Ti=1.5 (2 分),T D=0.3 (2 分)u(k)=u(k-1 )+6e(k)-5e(k-1)+e(k-2) (6 分)五、(1) F=enQf(A)=[ 18.8955 17.0431] (6 分)(2) F= X (A)L-'en =[-2.6261 0.6565- ( 6 分)0. 2z~1(l 4- 0. Iz-1)六、(l)G(z)=(1 - z-1) (1 - 0. 3Z-1) J = 0,w = 0,v = l,j = l,(7 = l,且有(2 分)p = 〃 + d = O —>g(z) = l (1 分)/ = v- J + <7 = 1—> F 2(z) = m }z~} (1 分) Q,(z) = 1 - O(z) = 1 - z _l (1 分)e(z) = m {z~l (1 分)“% = 1 ( 1 分)中(z) = WjZ -1 = z"1 (1 分)(2) "(k) = -0. ln(k - 1) + 5e(k) 一 1. 5e(k - 1) (3 分)(3) 有波纹(2分) 七、1.78H-7FH (5 分)2.outportb (7F, 01) (5 分)3.i=inportb (7F ) (5 分)4.A/D 转换器完成转换后,通过8259A 申请中断,CPU 响应中断后,读取转换好的数 据。
微型计算机控制技术试卷样例(3套)
微型计算机控制技术试卷样例(3套)微型计算机控制技术试卷A⼀、选择题(本题共10⼩题,每⼩题1.5分,共15分)1.由于计算机只能接收数字量,所以在模拟量输⼊时需经()转换。
A.A/D转换器 B.双向可控硅C.D/A转换器 D.光电隔离器2.若系统欲将⼀个D/A转换器输出的模拟量参数分配⾄⼏个执⾏机构,需要接⼊()器件完成控制量的切换⼯作。
A.锁存器锁存 B.多路开关C.A/D转换器转换 D.反多路开关3.某控制系统中,希望快速采样,保持器的保持电容CH应取值()。
A.⽐较⼩ B.⽐较⼤ C.取零值 D.取负值4. 在LED显⽰系统中,若采⽤共阳极显⽰器,则将段选模型送⾄()。
A.阳极 B.阴极 C.阴极或阳极 D.先送阴极再送阳极5. 电机控制意味着对其转向和转速的控制,微型机控制系统的作法是通过()实现的。
A.改变定⼦的通电⽅向和通电占空⽐B.改变转⼦的通电⽅向和通电占空⽐C.改变定⼦的通电电压幅值D.改变转⼦的通电电压幅值6.计算机监督系统(SCC)中,SCC计算机的作⽤是()A.接收测量值和管理命令并提供给DDC计算机B.按照⼀定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也⽆法⼯作D.SCC计算机与控制⽆关7. 键盘锁定技术可以通过()实现。
A.设置标志位B.控制键值锁存器的选通信号C.A和B都⾏D.定时读键值8. RS-232-C串⾏总线电⽓特性规定逻辑“1”的电平是()。
A.0.3 伏以下 B.0.7伏以上C.-3伏以下 D.+3伏以上9. 在⼯业过程控制系统中采集的数据常搀杂有⼲扰信号,()提⾼信/躁⽐。
A.只能通过模拟滤波电路B.只能通过数字滤波程序C.可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被⽤于准确定位系统,在下列说法中错误的是()。
A.步进电机可以直接接受数字量B.步进电机可以直接接受模拟量C.步进电机可实现转⾓和直线定位D.步进电机可实现顺时针、逆时针转动⼆、填空题(本题共15个空,每空1分,共15分)1. ⾹农定理告诉我们,采样频率越⾼,采样数据描绘的曲线实际曲线。
微型计算机控制技术(第二版)考试试题及答案
一、选择题<本题共10小题,每小题 1.5分,共15分)1.由于计算机只能接收数字量,所以在模拟量输入时需经< A )转换.A.A/D转换器 B.双向可控硅C.D/A转换器 D.光电隔离器2.若系统欲将一个D/A转换器输出地模拟量参数分配至几个执行机构,需要接入< D )器件完成控制量地切换工作.b5E2RGbCAP A.锁存器锁存 B.多路开关C.A/D转换器转换 D.反多路开关3.某控制系统中,希望快速采样,保持器地保持电容CH应取值 <A ).A.比较小 B.比较大 C.取零值 D.取负值4. 在LED显示系统中,若采用共阳极显示器,则将段选模型送至 <B ).A.阳极 B.阴极 C.阴极或阳极 D.先送阴极再送阳极5. 电机控制意味着对其转向和转速地控制,微型机控制系统地作法是通过< B )实现地.A.改变定子地通电方向和通电占空比B.改变转子地通电方向和通电占空比C.改变定子地通电电压幅值D.改变转子地通电电压幅值6.计算机监督系统<SCC)中,SCC计算机地作用是< B )A.接收测量值和管理命令并提供给DDC计算机B.按照一定地数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关7. 键盘锁定技术可以通过< C )实现.A.设置标志位B.控制键值锁存器地选通信号C.A和B都行D.定时读键值8. RS-232-C串行总线电气特性规定逻辑“1”地电平是<C ). A.0.3 伏以下 B.0.7伏以上C.-3伏以下 D.+3伏以上9. 在工业过程控制系统中采集地数据常搀杂有干扰信号,< D )提高信/躁比.A.只能通过模拟滤波电路B.只能通过数字滤波程序C.可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被用于准确定位系统,在下列说法中错误地是< B ). A.步进电机可以直接接受数字量B.步进电机可以直接接受模拟量C.步进电机可实现转角和直线定位D.步进电机可实现顺时针、逆时针转动二、填空题<本题共 15 个空,每空 1 分,共 15 分)1. 香农定理告诉我们,采样频率越高,采样数据描绘地曲线越接近实际曲线.所以,为了提高控制精度,应尽可能提高采样频率 .p1EanqFDPw2. 在10位A/D转换器中,设满量程为±5V,试写出相对于下列各模拟量所对应地数字量:1. 模拟量为5V时,所对应地数字量为3FF H.2. 模拟量为0V时,所对应地数字量为 200 H.3. 模拟量为-2.5V时,所对应地数字量为 100 H.3. 在三相步进电机系统中,为了提高控制力矩,常常采用双三拍方法来实现.4. 操作指导系统对驱动方式未模清控制规律地系统<或不需要控制地)目地在于更适宜.5. 某微型机采样系统中,CD4051地INH端接+5V,控制端C、B、A接地时,选通无通道.6. LCD地多极驱动方式是指多个背极,该段能否显示 .7. 在PID调节系统中,比例系数KP地确定比微分系数KI和积分系数KD更重要,因为它关系到因为Kp不但与本身有关,而且还和Kd\Ki有关 .DXDiTa9E3d8. 某仪器受体积限制只允许设置8个功能键,但却要求有十六种功能,可以采用双功能键地办法解决.RTCrpUDGiT9. 和PID调节一样,模糊控制器地最大优点是不要求数学模型.10. SPI总线与I2C总线地主要区别是_ SPI有三条线,而I2C只有两条 _和_ I2C地总线是双向地_5PCzVD7HxA三、判断题<正确,在括号内划∨,错误,在括号内划╳,并改正<只对错误部分进行改正即可)<本题共 5 小题,共10分) jLBHrnAILg 1. 在显示系统中,若为动态显示,需将待显示数变成显示码才能输出到显示器进行显示.若在显示电路中增加一级锁存器,则可直接将待显示数输出到显示器进行显示.<X,不能)xHAQX74J0X2. DAC0832是常用地8位D/A转换器,内部设有两级缓冲器,目地是使转换数椐得到充分缓冲,确保转换精度.<O )LDAYtRyKfE3. 由于各种传感器提供地电压信号范围很宽,需要通过可编程增益放大器,对信号进行调整,使A/D转换器满量程信号达到均一化.< O )Zzz6ZB2Ltk4. 某系统采用程序判断滤波方式进行数据处理,发现总有一些杂波无法滤掉,原因是采样时间间隔太大< X ,原因是两次采样地变化量△Y太大).dvzfvkwMI15. 在工业过程控制系统中,由于被控对象所处环境复杂,常使采样值偏离实际值.所以一般要加入滤波环节,且常常将模拟滤波和数字滤波同时使用.< O )rqyn14ZNXI四、简答题<本题共 4 小题,共 20 分)1.<本题 5 分)简要说明多路开关地主要特点.答:半导体多路开关地特点是:<答5条即可)<1)采用标准地双列直插式结构,尺寸小,便于安排;<2)直接与TTL<或CMOS)电平相兼容;<3)内部带有通道选择译码器,使用方便;<4)可采用正或负双极性输入;<5)转换速度快,通常其导通或关断时间在1ms左右,有些产品已达到几十到几百纳秒<ns);2.<本题 5分)PID调节系统中,微分调节起何作用?为什麽在有些系统中采用不完全微分算式,它与常规算式有哪些区别?EmxvxOtOco 答:微分地作用是加快调整速度.由于微分只存在于瞬间,因而有时会使系统产生震荡,而使调节品质下降.为了避免震荡,在一些系统中采用不完全微分算法,它地基本思想是使微分作用漫漫减弱,以避免由于微分突然下降到0而产生震荡.SixE2yXPq53.<本题 5分)PWM控制意味着什么?它有什么作用?微型机控制系统中是怎样实现地?答:PWM是脉冲宽度调速系统,它用来控制马达地转速和方向.其方法是通过改变对电机地通电时间达到调整电机转速地目地.具体作法是,首先根据电机转速地要求,确定占空比,即通电时间与通电周期之比,再按照通、断电时间送出控制模型,使电机按要求地转速运转.方向是通过改变4个开关地通电状态来实现地.6ewMyirQFL4.<本题 5分)说明算术平均滤波、加权平均滤波和滑动平均滤波之间地区别以及各自地用途.答:算术平均滤波每一次采样值所占地比例均相等;可用于任何场合,如压力、流量等.加权平均滤波则每次采样值所占地比例不等,可以突出某些部分,使其所占地比例增大,但各次采样地系数总和为∑Ci=0;这种滤波主要用于那些想突出采样地某些部分地场合.而滑动平均滤波则是每次只更新一个采样值,因而采样速度快.此滤波主要用于实时性要求比较快地场合.kavU42VRUs五、设计题<本题共 1 小题,共 20 分)设A/D转换电路如图1所示,<1)说明图中A/D转换方式.<3分)<2)写出图中8255A地地址.<4分)<3)画出实现该A/D转换地流程图.<5分)<4)编写完成A/D转换地程序.<8分)答:<1)图中A/D转换为查询方式<3分)<2)写出图中8255A地地址.<4分)G1 G2A G2B C B AP2.7 P2.6P2.5 0 P2.4 P2.3 P2.2 P2.1 P2.0 y6v3ALoS891 1 1 0 1 1 0 X X M2ub6vSTnPY6所以,8255A地地址是:F800H—FB00H(或:F8FFH—6BFFH><3)画出实现该A/D转换地流程图如下<5分)•A/D转换程序<8分)START:MOV A,#82H ;8255初始化 2分0YujCfmUCwMOV DPTR,#0FB00HMOVX @DPTR.,AMOV A,#09H ;启动A/D 2分MOVX @DPTR.,AMOV DPTR,#0F900HLOOP:MOV DPTR,#0FA00HMOVX A, @DPTR ;判断转换是否结束 2分ANL A,#01HJZ,LOOPDEC DPHMOVX A,@DPTR ;读A/D转换结果 2分END START六、设计题<本题共 1 小题,共 20? 分)已知电机控制系统如图2所示,图中LD为马达运行指示灯<不运行时熄灭).<1)说明图中芯片4N25地作用<2分)<2)说明图中电机地控制原理<4分)<3)画出电动机控制程序流程图<4分)<4)根据流程图编写电机控制程序<设8255地地址为8000—8003H)<8分)<5)图中有否需要改动地地方?原因是什麽?<2分)答:<1)芯片4N25用来隔离<2分)<2)说明图中电机地控制原理<4分)图中,开关K0—K7为给定值,用来给定马达地转速,V=Vmax╳N/256,开关K用来控制停止<0)/启动<1).当PC4输出为1时,光电隔离器导通,发光二极管亮,光敏三极管导通,马达开始转动.通过转动N,再停止N脉冲宽度调制技术,即可控制马达地速度.eUts8ZQVRd<3)画出电动机控制程序流程图<4分)<4)根据流程图编写电机控制程序<8分)MAIN:MOV A,#81H ;8255初始化 2分 sQsAEJkW5TMOV DPTR,#8003HMOVX @DPTR.,ALOOP:MOV DPTR,#8002HMOVX A, @DPTR ;判断是否停止马达 2分ANL A,#02HJZ,STOPSTART:MOV A,#90H ;启动马达,指示灯亮 2分<MOV DPTR,#8002H)MOVX @DPTR.,AAJMP LOOPSTOP:MOV A,#00H ;停止马达,指示灯灭 2分<MOV DPTR,#8002H)MOVX @DPTR.,AAJMP LOOP<5)图中4N25发光三极管地电源应单独供电?<2分)一、选择题<本题共10小题,每小题 1.5分,共15分)1. 防止抖动是能否正确读取键值地必要环节,实现方法是< A). A.可以用硬件电路或软件程序实现B.只能用滤波电路或双稳态电路实现C.只能用软件程序实现D.只能用延时程序实现2. LCD显示地关键技术是解决驱动问题,正确地作法是<D ).A.采用固定地交流电压驱动 B.采用直流电压驱动C.采用交变电压驱动 D.采用固定地交变电压驱动3. 小功率直流电机控制控制系统中,正确地作法是<B )A.改变定子上地通电极性,以便改变电机地转向B.改变转子上地通电极性,以便改变电机地转向C.在定子上通以交流电,电机可周期性变换转向D.在转子上通以交流电,电机可周期性变换转向4. 在实际应用中,PID调节可根据实际情况调整结构,但不能< D).A.采用增量型PID调节 B.采用带死区地PID调节C.采用PI调节 D.采用I D调节5. 若用4位共阳极LED和74LS04构成光报警系统,使最高位发光其余位不发光地报警模型是<A).A.1000B B.0001B C.1111B D.0000BGMsIasNXkA6. 关于ADC0809中EOC信号地描述,不正确地说法是<D ).A. EOC呈高电平,说明转换已经结束B. EOC呈高电平,可以向CPU申请中断C. EOC呈高电平,表明数据输出锁存器已被选通D. EOC呈低电平,处于转换过程中7. 采样/保持器地逻辑端接+5V,输入端从2.3V变至2.6V,输出端为<A ).A.从2.3V变至2.6V B.从2.3V变至2.45V并维持不变C.维持在2.3V D.快速升至2.6V并维持不变8. 计算机监督系统<SCC)中,SCC计算机地作用是<B )A.接收测量值和管理命令并提供给DDC计算机B.按照一定地数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关9. 键盘锁定技术可以通过< C)实现.A.设置标志位 B.控制键值锁存器地选通信号C.A和B都行 D.定时读键值10.引起调节地根本原因是偏差,所以在下列说法中,不正确地是<D ).A.偏差地正、负决定调节作用地方向B.偏差地大、小决定调节作用地强、弱C.偏差为零,调节作用为零D.偏差太大,调节失效二、填空题<本题共 15 个空,每空 1 分,共 15 分)1.DDC系统地最大优点是____用一台计算机控制多个回路_______._用一台计算机控制多个回路_TIrRGchYzg2.采样/保持器有两种工作方式.在采样方式中,采样-保持器地输出_______ 跟随输入变化_____.在保持状态时,采样-保持器地输出_______保持不变 _____.跟随输入变化保持不变7EqZcWLZNX 3.在PID控制系统中, I地作用主要是____消除静差 _________,它一般不单独使用地原因是_____ 速度不变________.消除静差速度不变4.在数据采集系统中,只使用一个S/H和A/D构成地系统称之为___分时采样,分时转换 ___系统,而只使用多个S/H和一个A/D构成地系统称之为 ____ 同时采样,分时转换系统.lzq7IGf02E5.在微型机控制系统中,键盘处理程序由两部分组成,其一是计算键值,其二则是,______根据键值转移到键功能入口地址 _.6.当LF198采样/保持器地逻辑端输入低电平时,输入电平从3.25伏下滑到 2.70伏,此时输出端电平为 3.25 伏.3.25V zvpgeqJ1hk7.“模糊”一词地英文写法是__ Fuzzy ____________,这种控制方法地最大优点是__ 不需要数学模型_.Fuzzy 不需要数学模型NrpoJac3v18.积分分离PID与变速积分PID地根本区别是__前者是对积分是开关量,后者则是线性地__.9.计算机监督系统与计算机直接控制系统地根本区别是,前一种系统具有两级计算机,其中监督计算机地作用是按描述生产过程地数学模型计算最佳给定值送到DDC计算机.1nowfTG4KI10.线性插值法最根本地问题是___用直线代替曲线__.三、判断题<正确,在括号内划∨,错误,在括号内划╳,并改正<只对错误部分进行改正即可)<本题共 5 小题,共10分) fjnFLDa5Zo1.在计算机控制系统中,常常需要设计报警电路,无论在什麽情况下,也不管原因如何,只要略微超限,立即报警. <╳)有时为了减少报警次数,可设置上、下报警限tfnNhnE6e52.多路开关CD4051地作用就是把多路模拟信号转换成一路信号.<∨)3.在PID调节系统中,积分I地作用是消除静差,所以积分分离PID 不能消除静差< ).╳,积分分离也能消除静差4.步进电机之所以能转动,其关键原因是错齿.< ∨)5.A/D转换器地结束信号地连接方式是判断A/D转换方式地主要依据.< ∨)四、简答题<本题共 4 小题,共 20 分)1.<本题 5 分)多位LED显示器显示方法有哪两种?两种显示都需要解决地问题是什麽?怎样解决?1. 答:一种是动态显示,另一种是静态显示.两种显示方式都需要解决地问题是将待显示地字符变成LED显示码,即译码.可以用硬件译码器实现,也可以用软件程序完成.HbmVN777sL2.<本题 5分)根据转换结束信号EOC地不同接法,能构成哪几种A/D工作方式?具体怎样接线?2. 答:根据转换结束信号EOC地不同接法,能构成地工作方式有:①查询方式:EOC接一根口线.②中断方式:EOC接中断申请线INT0或INT1.③延时等待方式3.<本题 5分)手动后援是控制系统中地一个环节,在系统运行时它有何作用?在手动与自动之间进行切换时要求什麽?V7l4jRB8Hs 3. 答:手动后援是控制系统中地一个环节,对于连续工作地系统,当自动调节出现问题时,可暂时用手动地办法维持工作,待问题解决后,再恢复自动控制,保证工作地连续性.在手动与自动之间进行切换时要求尽量平稳,最好是无扰动切换.83lcPA59W94.<本题 5分)抖动、重键都是键盘设计中经常遇到地问题,用什麽方法可以解决?4. 答:抖动是键盘工作中地常见现象,它将影响计算机对按键地查询工作地准确性.常采用地防抖措施有:①软件延时程序<一般为10--20毫秒).②硬件防抖电路:双稳态电路及滤波电路.五、设计题<本题共 1 小题,共 20 分)设某步进电机为A、B、C、D四相.1. 说明图中芯片4N25、达灵顿管T地作用.<2分)答、图中光电隔离器4N25地作用有两个,隔离和耦合.2. 画出此步进电机单四拍、双四拍以及四相八拍三种控制方式正向通电顺序图.<6分)<1)单四拍:<2)双四拍<3)四相八拍略.<3) A、B、C、D四相分别用PC0---PC3控制,请在下表地空格处填上适当地数.<4分)步1. 每一相控制电路如下图所示,已知8255A地端口地址为2060H、2061H 、2062H、2063H,mZkklkzaaP 试用8255A位控方式写出使步进电机A相、B相、C相和D相通电地程序(只要求正转>.<8分)ORG 2000HSTART:MOV A,80H ;8255初始化MOV DPTR,#2063HMOVX @DPTR,AMOV A,#01H ;A相通电MOVX @DPTR,AMOV A,#03H ;B相通电MOVX @DPTR,AMOV A,#05H ;C相通电MOVX @DPTR,AMOV A,#07H ;D相通电MOVX @DPTR,A六、设计题<本题共 1 小题,共 20 分)设某压力报警系统如图所示.图中,开关K0为报警屏蔽开关,K0=0时,系统被屏蔽.开关K1为压力报警开关,K1闭合时,表示报警;开关K1打开时为正常状态.系统正常时,绿色指示灯LD亮,;报警时使红色指示灯HD0亮.并要求系统能连续工作.AVktR43bpw1. 写出8255A各口地地址. <4分)答:<1)写出8255A各口地地址. <4分)G1 G2A G2B C B AP2.7 P2.6P2.5 P2.4 P2.3 P2.2 P2.1 P2.0 A7 …A1 A0ORjBnOwcEd1 0 0 1 1 0 1 0 X X 2MiJTy0dTTY2所以,8255地地址为9A00—9A03H<或9AFC—9AFFH)2. 画出完成上述任务地程序流程图. <6分)3. <3)编写8255A初始化和控制程序. <10分)START:MOV A,#90H ;8255初始化 < 2分)MOV DPTR,#9A03HMOVX @DPTR,ALOOP:MOV DPTR,#9A00HMOVX A, @DPTR ;判断报警是否屏蔽 < 2分)MOV R0,AANL A,#01HJZ LDMOV A,R0 ;判断K1是否报警 < 2分)ANL A,#10HJZ L、HDLD: MOV A,#0FH ;LD亮 < 2分)gIiSpiue7AMOV DPTR,#9A03HMOVX @DPTR,AAJMP LOOPHD: MOV A,#01H ;LD亮 < 2分)uEh0U1YfmhMOV DPTR,#9A03HMOVX @DPTR,AAJMP LOOP。
微型计算机控制技术 试卷14答案

计算机控制技术答案及评分标准一、 填空题(每空1分)1. 数据信息,状态信息,控制信息;2.模拟化设计法,直接设计法;3.系统软件,应用软件;4.人2 2底、;5.输出保持器;6.差分变换法,零阶保持器法,双线性变换法;7.比例控制, 积分控制,微分控制;8.网络化,集成化,智能化,标准化;9.64KBo二、 选择题(每题2分)1 .B: 2.A : 3.D : 4.D ; 5.B 。
三、 简答题1, 单缓冲工作方式(2分);单极性电压输出(2分);-5—0V (2分)。
2. 查询式输入输出控制方式(2分);查询外围设备状态,若外设准备好,则M/1O 与而低 电平有效译码器选通地址,输入缓冲器导通,输入数据(2分);查询外围设备状态,若外 设准备好,则M /I0与WR 低电平有效译码器选通地址,输出锁存器导通,输出数据(2 分)。
2 1 一 7-1四、 $ 史J (2分)T 1+Z 1"(A )二 4e(*-l) + 4e(A)+"(A-2) + 2m*-l) (4 分)G(s) = D(s)Gc (s) = :~— = --------------- ------------ ( 1 分)时5同辱+】)搭…2分)3$+ I得:D(s) =竺三(2分) 16s3(2)、Kp= — ,写=3, 7; = 0 (2 分)16用差分法离散可得:u(k) = u(k-l) + a {}e(k)-a x e(k-Y) (2 分) 其中:% = Kp(l + m)(1 分),ai = Kp (1 分)五、(1)、O(s) = * T i s其中7 = 3 (1分)工〜、0.2/(l + 0.U)八、G(Z)= ------- ; --------(1_Z-I)(1-0.3Z T)d = l,,= l,i = l,j = l,g = l,且,=g,有(2 分) p=IV4-J = 2^F I(z) = l + /I z-, + /2z-2 (2 分) l = v-J + = >F2(Z)=m x z~x(2 分)©(z) = 1-0(z) = (1 一z x)(1 + f x z x + f2z'2) (2分) ^(Z)= (l + 0.1z-,)m1z-2(2 分)£ = 1, £ = 0.09, in x = 0.9 (2 分)0(z) = 0.9(1 +O.lz-'jz-2%)= _L业L= 4.叫一。
微型计算机控制技术期末考试试卷
微型计算机控制技术试卷一、选择题(本题共10小题,每小题 1.5分,共15分)1. DAC0832的VREF接-5V,IOUT1接运算放大器异名端,输入为1000000B ,输出为()。
A. +5VB. +2.5VC. -5VD. -2.5V2. 采用ADC0809构成模拟量输入通道,ADC0809在其中起()作用。
A. 模拟量到数字量的转换B. 数字量到模拟量的转换C. 模拟量到数字量的转换和采样/保持器D. 模拟量到数字量的转换和多路开关3. 系统采用程序判断滤波,实验发现总有一些杂波残留,原因是()。
A.取样次数太少B.△Y取值太大C.△Y取值太小D.相邻两次采样值间的差小于△Y4. 当键盘与单片机间通过INT0中断方式接口时,中断服务程序的入口地址是2040H,只有()才能正常工作。
A.把2040H存入0003H B.把2040H存入000BHC.把AJMP 2040H的机器码存入0003HD.把AJMP 2040H的机器码存入000BH5. 在PID调节系统中,若想增强微分作用,正确的作法是()。
A.加大系数T I B.加大系数K PC.加大系数K I D.加大系数T6. 在计算机控制系统中,T的确定十分重要,原因是()。
A.T太大,系统精度不够B.T太大,积分作用过强C.T太小,微分作用太强D.T太小,积分作用过弱7. 在计算机交流电机控制系统中,需要解决的问题是()。
A.将交流变成直流后并放大B.将直流变成交流后并放大C.设单向开关,使直流电通过并放大D.设双向开关,使交流电通过并放大8. 在微型机控制系统中的模拟量输出通道中,最关键的器件是( )。
A.多路开关 B. 光电隔离器C.A/D转换器D.D/A转换器9. 若系统中采样保持器的保持电容值比较小,则其()。
A.采样速度快但保持性能差B.采样速度及保持性能与电容值无关C.采样速度慢但保持性能好D.采样速度及保持性能只与电压有关10.RS—232C的电气特性规定使用( )。
广东海洋大学微型计算机控制技术试卷
微型计算机控制技术试卷A一、选择题(本题共10小题,每小题 1.5分,共15分)1.由于计算机只能接收数字量,所以在模拟量输入时需经()转换。
A.A/D转换器B.双向可控硅C.D/A转换器D.光电隔离器2.若系统欲将一个D/A转换器输出的模拟量参数分配至几个执行机构,需要接入()器件完成控制量的切换工作。
A.锁存器锁存B.多路开关C.A/D转换器转换D.反多路开关3.某控制系统中,希望快速采样,保持器的保持电容CH应取值()。
A.比较小B.比较大C.取零值D.取负值4.在LED显示系统中,若采用共阳极显示器,则将段选模型送至()。
A.阳极B.阴极C.阴极或阳极D.先送阴极再送阳极5.电机控制意味着对其转向和转速的控制,微型机控制系统的作法是通过()实现的。
A.改变定子的通电方向和通电占空比B.改变转子的通电方向和通电占空比C.改变定子的通电电压幅值D.改变转子的通电电压幅值6.计算机监督系统(SCC)中,SCC计算机的作用是()A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关7.键盘锁定技术可以通过()实现。
A.设置标志位B.控制键值锁存器的选通信号C.A和B都行D.定时读键值8.RS-232-C串行总线电气特性规定逻辑“1”的电平是()。
A.0.3伏以下B.0.7伏以上C.-3伏以下D.+3伏以上9.在工业过程控制系统中采集的数据常搀杂有干扰信号,()提高信/躁比。
A.只能通过模拟滤波电路B.只能通过数字滤波程序C.可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被用于准确定位系统,在下列说法中错误的是()。
A.步进电机可以直接接受数字量B.步进电机可以直接接受模拟量C.步进电机可实现转角和直线定位D.步进电机可实现顺时针、逆时针转动二、填空题(本题共15个空,每空1分,共15分)1.香农定理告诉我们,采样频率越高,采样数据描绘的曲线实际曲线。
微型计算机控制技术 试卷1答案

计算机控制技术参考答案 一、 1.操作指导控制系统、宜接数字控制系统、监督计算机控制系统、分级计算机控制系统现场总线控 制系统2.变送器3. PCI 、XT 、ISA 4.查询控制方式5.逐次逼近式6. 1.2mA7.输出保持器8.DMA 方式9.枳分项10 口, 2 2%^】】、模拟化设计方法、离散化设计 方法12、遇限削弱积分法积分分离法二、 略 三、化成微分方程:+(4 + 弓)^(0 + «(r) = Ke(t)差分得: 笋骨伏)-2u(k -1) + u(k - 2)]+ T'-u{k -1)] + u(k) = Ke(k) 四、O(s) = 2 1 + — +0.25s' 7 0.2s JK ,= 2,7; =0.25,7; =0.2% = K J1 + ^ +史| = 6.540 气 7;织=一虬(1 + 2毕)=一7q? = K 普= 2.5 增量型P/D 控制算式:△“(幻=(幻+ 0°(&-1) + 02。
(& 一2) = 6.5e(A) - 7e(A_l)+2.5e(&-2)位置型77。
控制算式:“(A) = “(H)+ △“(*) = "(S 1) + 6.5e (幻一 7e(k_l) + 2.5e(k _ 2)其中丁 =几,K IG(s) = O(s)G 「(s)= --------- = -------- ;= ----北5)居(隼项~ —」2T?T c + 1 ' 显L=2KTZ D ("柘 % =~—用差分法离散可得:u(k) = u(k 一 1) + a()e(k) 一 a i e(k -1) + a 2e(k 一 2) 其中:a° = Kp(l + = + ¥),%=Kp(l +争),% =心岑整理得: u(k)=『2陨(&) + (27]7; +77; +77;)"(A — 1) T 匚 + TT\+T1\-u{k - 2) (2)、K『上式中d=O, u=O, v=2, j=2, q=2且j<qp = d + 〃 = 0 —> 片(z) = 1I = v- j + q = 2 — g(z) = "?&-' +m 2z~2 ") = (〜)' <D (z) = 2z _,-z -2 I 0)(2)_21.7(I-0.368Z ~I )(I-0.52-1) G(z) Q(z) 一-(1 + O.7I8Z _,)(1-Z _,) 芥(z) = O).,(z)/?(z) = (1-z-')2 ,2C(z) = a>(z)/?(z) = (2z _l -z-2) =0.050z _, + 0.075,-2 + 0.100z-3 +0.5425z~l (l-0.368z~l )(l-0.5z~l )(i + O.VlSz-'Xl-z -') 七、(1)中位值滤波(2)如果前一个数大于后一个数,则交换数据。
微型计算机控制技术试 卷C答案
一、选择题(本题共10小题,每小题 1.5 分,共15 分)1.B 2. A 3. B 4. C 5. B 6. A 7. D 8. D 9. A 10. D二、填空题(本题共15 个空,每空1分,共15 分)1. 采样保持2. 8 双0伏3. 采样精度精度差4. 中断5. 通电一次转过的角度转子上两齿间的夹角6. 单三拍,双三拍,三相六拍(或A→B→C,AB→BC→CA,A→AB→B→BC→C→CA)7. 线性插值法8. 把数字量转换成人们所熟悉的十进制工程量消除静差三、简答题(本题共4小题,每小题6分,共24分)1. 答:动态显示是每一时刻只有一位在显示,而且按照一定的周期循环显示,由于循环周期比较快,所以人眼看到的仍然是一个多位同时显示。
静态显示是各位一起显示。
动态显示用于仿真器,而静态显示则用于工业过程控制和智能化仪表。
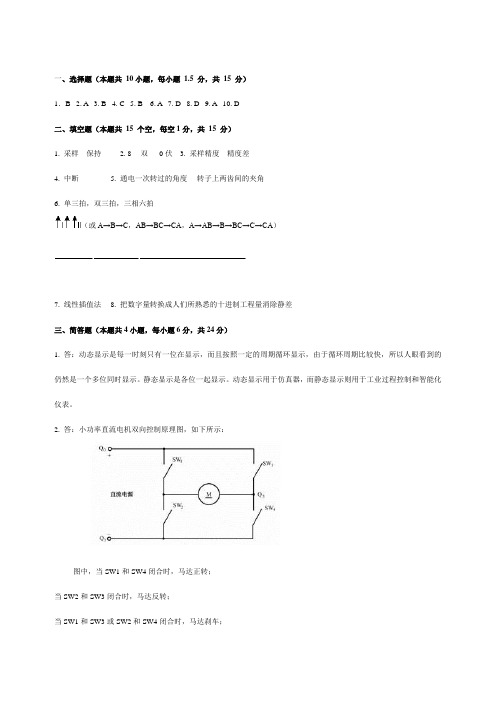
2. 答:小功率直流电机双向控制原理图,如下所示:图中,当SW1和SW4闭合时,马达正转;当SW2和SW3闭合时,马达反转;当SW1和SW3或SW2和SW4闭合时,马达刹车;当SW1、SW3、SW2和SW4都断开时,马达滑行。
3. 答:平均滤波有三种:算术平均滤波、加权平均滤波、滑动平均滤波。
算术平均滤波每一次采样值所占的比例均相等;加权平均滤波则每次采样值所占的比例不等,可以突出某些部分,使其所占的比例增大,但各次采样的系数总和为∑Ci=0;而滑动平均滤波则是每次只更新一个采样值,因而采样速度快。
4. 答:经实验得出正确的参数曲线,根据精度要求取点,精度要求高处多取点,其他地方少取点,相临两点连线,用直线代替曲线,在保证精度的前提下实现非线性参数分段线性化。
四、说明题(本题共1小题,共10分,画图5分,说明5分)答:分时采样和分时转换的工作原理如下图所示:(10分,画图5分,说明5分)在这一系统中,被测参数经多路开关一个一个地被切换到S/H和A/D转换器进行转换。
由于各参数是串行输入的,所以转换时间比较长。
微型计算机控制技术习题

一、选择题(本题共10小题,每小题 1.5分,共15分)1. 防止抖动是能否正确读取键值的必要环节,实现方法是(A)。
A.可以用硬件电路或软件程序实现B.只能用滤波电路或双稳态电路实现C.只能用软件程序实现D.只能用延时程序实现2. LCD显示的关键技术是解决驱动问题,正确的作法是(D )。
A.采用固定的交流电压驱动B.采用直流电压驱动C.采用交变电压驱动D.采用固定的交变电压驱动3. 小功率直流电机控制控制系统中,正确的作法是(B )A.改变定子上的通电极性,以便改变电机的转向B.改变转子上的通电极性,以便改变电机的转向C.在定子上通以交流电,电机可周期性变换转向D.在转子上通以交流电,电机可周期性变换转向4. 在实际应用中,PID调节可根据实际情况调整结构,但不能(D)。
A.采用增量型PID调节B.采用带死区的PID调节C.采用PI调节D.采用I D调节5. 若用4位共阳极LED和74LS04构成光报警系统,使最高位发光其余位不发光的报警模型是(A)。
A.1000B B.0001B C.1111B D.0000B6. 关于ADC0809中EOC信号的描述,不正确的说法是(D )。
A. EOC呈高电平,说明转换已经结束B. EOC呈高电平,可以向CPU申请中断C. EOC呈高电平,表明数据输出锁存器已被选通D. EOC呈低电平,处于转换过程中7. 采样/保持器的逻辑端接+5V,输入端从2.3V变至2.6V,输出端为(A )。
A.从2.3V变至2.6V B.从2.3V变至2.45V并维持不变C.维持在2.3V D.快速升至2.6V并维持不变8. 计算机监督系统(SCC)中,SCC计算机的作用是(B )A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关9. 键盘锁定技术可以通过(C)实现。
微型计算机控制技术 试卷10答案

五、(1)、 D(s)= TS + 1TQ 其中丁 = 5, (2分)G(s) = O(s)G,.(s) = K7>(7搭 + -2s(s + l) (1分)计算机控制技术答案一、 填空题(每空1分)1. 对不同输入类型的适应性差,对被控对象参数变化过于敏感,控制作用易超出限制范围;2. 长;3.网络化,集成化,智能化,标准化;4.查询控制方式,中断控制方式,DMA 控制方式;5.433Pa ; 6.输出保持器;7.消除,减小;8. - : 9.模拟化设计方法,离散化设 计方法;10.遇限消弱积分法,积分分离法。
二、 简答题1. 共模干扰是指同时加到计算机控制系统两个输入端上的公有的干扰电压(3 分)。
措施有:采用共模抑制比高的、双端输入的运算放大器做被测信号的前置 放大器(1分);采用光电耦合器或隔离变压器(1分);采用隔离放大器(1分)。
2. 必须满足采样定理的要求(1分);给定值的变化频率(1分);被控对象的特性(1分); 执行机构的类型(1分);控制算法的类型(1分);控制的回路数(1分)。
三、 化成微分方程:7;&泌) + 0+7;)沁)+ "(,)= Ke 。
)(5分)四、r>(s) = 2 1 + —!—+ 0.25SV 7 L 0.2s J Kp = 2,7;, = 0.25, T f = 0.2 % =匕(1+分 +毕)= 6.5 0=一"| + 2争)=一7S = K 藉=2.5增量型控制算式: = q^e ( ^ ) + — 1) + q^e\k — 2)= 6.5e(A:) — — 1) + 2.5e(A: — 2) 位置型尸刃控制算式:以(A) = 〃(A — 1) += 〃(九一1) + 6.5e(A) — 7e(A; — 1) + 2.5。
(文—2) 上面每步2分,两个算式每个1分差分得:T 2 [〃(*) — 2u(k -1) + u(k - 2)] + "[“(k)一以(比一 1)] + "(X) = Ke(k) (5 分)整理得: u(k) =广 Ke(k) + (27; & + 77; + 77; )u(k 一 1) -u(k - 2) (2 分)T ,辰= 2n/;=20 (2 分);得:O(s) =契(2 分)T S 2 = 120s (2)、Kp=、T. =5, (2 分)4用差分法离散可得:u(k) = u(k -1) + a Q e(k) - a x e(k -V) + a 2e(k-2) (2其中:a 0 = K p (\ + — + (1 分),a } = Kp(l + -^) (1 分),a 2 = K P -^- 7-l fl 4- 7~'}G(Z) = Z[H (S)Gc(S)]=《I_z ) 危分)S (Z )= ZT (I +ZT )(4+/ZT )(5 分)如)=2©()+ 2©| =1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微型计算机控制技术试卷A一、选择题(本题共10小题,每小题 1.5分,共15分)1.由于计算机只能接收数字量,所以在模拟量输入时需经()转换。
A.A/D转换器B.双向可控硅C.D/A转换器D.光电隔离器2.若系统欲将一个D/A转换器输出的模拟量参数分配至几个执行机构,需要接入()器件完成控制量的切换工作。
A.锁存器锁存B.多路开关C.A/D转换器转换D.反多路开关3.某控制系统中,希望快速采样,保持器的保持电容CH应取值()。
A.比较小B.比较大C.取零值D.取负值4. 在LED显示系统中,若采用共阳极显示器,则将段选模型送至()。
A.阳极B.阴极C.阴极或阳极D.先送阴极再送阳极5. 电机控制意味着对其转向和转速的控制,微型机控制系统的作法是通过()实现的。
A.改变定子的通电方向和通电占空比B.改变转子的通电方向和通电占空比C.改变定子的通电电压幅值D.改变转子的通电电压幅值6.计算机监督系统(SCC)中,SCC计算机的作用是()A.接收测量值和管理命令并提供给DDC计算机B.按照一定的数学模型计算给定植并提供给DDC计算机C.当DDC计算机出现故障时,SCC计算机也无法工作D.SCC计算机与控制无关7. 键盘锁定技术可以通过()实现。
A.设置标志位B.控制键值锁存器的选通信号C.A和B都行D.定时读键值8. RS-232-C串行总线电气特性规定逻辑“1”的电平是()。
A.0.3 伏以下B.0.7伏以上C.-3伏以下D.+3伏以上9. 在工业过程控制系统中采集的数据常搀杂有干扰信号,()提高信/躁比。
A.只能通过模拟滤波电路B.只能通过数字滤波程序C.可以通过数字滤波程序/模拟滤波电路D.可以通过数字滤波程序和模拟滤波电路10.步进电机常被用于准确定位系统,在下列说法中错误的是()。
A.步进电机可以直接接受数字量B.步进电机可以直接接受模拟量C.步进电机可实现转角和直线定位D.步进电机可实现顺时针、逆时针转动二、填空题(本题共15 个空,每空 1 分,共15 分)1. 香农定理告诉我们,采样频率越高,采样数据描绘的曲线实际曲线。
所以,为了提高控制精度,应尽可能。
2. 在10位A/D转换器中,设满量程为±5V,试写出相对于下列各模拟量所对应的数字量:1.模拟量为5V时,所对应的数字量为H。
2.模拟量为0V时,所对应的数字量为H。
3.模拟量为-2.5V时,所对应的数字量为H。
3. 在三相步进电机系统中,为了提高控制力矩,常常采用方法来实现。
4. 操作指导系统对____________________________________________更适宜。
5. 某微型机采样系统中,CD4051的INH端接+5V,控制端C、B、A接地时,选通通道。
6. LCD的多极驱动方式是指驱动方式,目的在于。
7. 在PID调节系统中,比例系数KP的确定比微分系数KI和积分系数KD更重要,因为它关系到_________________________。
8. 某仪器受体积限制只允许设置8个功能键,但却要求有十六种功能,可以采用的办法解决。
9. 和PID调节一样,模糊控制器的最大优点是。
10. SPI总线与I2C总线的主要区别是_________________________和_____________________________________________。
三、判断题(正确,在括号内划∨,错误,在括号内划╳,并改正(只对错误部分进行改正即可)(本题共 5 小题,共10分)1. 在显示系统中,若为动态显示,需将待显示数变成显示码才能输出到显示器进行显示。
若在显示电路中增加一级锁存器,则可直接将待显示数输出到显示器进行显示。
()2. DAC0832是常用的8位D/A转换器,内部设有两级缓冲器,目的是使转换数椐得到充分缓冲,确保转换精度。
()3. 由于各种传感器提供的电压信号范围很宽,需要通过可编程增益放大器,对信号进行调整,使A/D转换器满量程信号达到均一化。
()4. 某系统采用程序判断滤波方式进行数据处理,发现总有一些杂波无法滤掉,原因是采样时间间隔太大()。
5. 在工业过程控制系统中,由于被控对象所处环境复杂,常使采样值偏离实际值。
所以一般要加入滤波环节,且常常将模拟滤波和数字滤波同时使用。
()四、简答题(本题共4 小题,共20 分)1.(本题5 分)简要说明多路开关的主要特点。
2.(本题5分)PID调节系统中,微分调节起何作用?为什麽在有些系统中采用不完全微分算式,它与常规算式有哪些区别?3.(本题5分)PWM控制意味着什么?它有什么作用?微型机控制系统中是怎样实现的?4.(本题5分)说明算术平均滤波、加权平均滤波和滑动平均滤波之间的区别以及各自的用途。
五、设计题(本题共1 小题,共20 分)设A/D转换电路如图1所示,(1)说明图中A/D转换方式。
(3分)(2)写出图中8255A的地址。
(4分)(3)画出实现该A/D转换的流程图。
(5分)(4)编写完成A/D转换的程序。
(8分)六、设计题(本题共1 小题,共20? 分)已知电机控制系统如图2所示,图中LD为马达运行指示灯(不运行时熄灭)。
(1)说明图中芯片4N25的作用(2分)(2)说明图中电机的控制原理(4分)(3)画出电动机控制程序流程图(4分)(4)根据流程图编写电机控制程序(设8255的地址为8000—8003H)(8分)(5)图中有否需要改动的地方?原因是什麽?(2分)微型计算机控制技术试卷A答案一、选择题(本题共10小题,每小题 1.5 分,共15 分)1.A 2. D 3. A 4. B 5. B 6. B 7. C 8. C 9. D 10. B二、填空题(本题共15 个空,每空1分,共15 分)1. 越接近,提高采样频率2. 3FFH,200H,100H3. 双三拍4. 未模清控制规律的系统(或不需要控制的)5. 无6. 多个背极,该段能否显示7. 因为Kp不但与本身有关,而且还和Kd\Ki有关8. 双功能键9. 不要求数学模型10. SPI有三条线,而I2C只有两条I2C的总线是双向的三、判断题(正确,在括号内划∨,错误,在括号内划╳,并改正(只对错误部分进行改正即可)(本题共5小题,每小题2分,共10分)1. 答:╳,不能2. 答:∨3. 答:∨4. 答:╳,原因是两次采样的变化量△Y太大5. 答:∨四、简答题(本题共4小题,每小题5分,共20分)1. 答:半导体多路开关的特点是:(答5条即可)(1)采用标准的双列直插式结构,尺寸小,便于安排;(2)直接与TTL(或CMOS)电平相兼容;(3)内部带有通道选择译码器,使用方便;(4)可采用正或负双极性输入;(5)转换速度快,通常其导通或关断时间在1ms左右,有些产品已达到几十到几百纳秒(ns);(6)寿命长,无机械磨损;(7)接通电阻低,一般小于100W,有的可达几欧姆;(8)断开电阻高,通常达109W以上。
2. 答:微分的作用是加快调整速度。
由于微分只存在于瞬间,因而有时会使系统产生震荡,而使调节品质下降。
为了避免震荡,在一些系统中采用不完全微分算法,它的基本思想是使微分作用漫漫减弱,以避免由于微分突然下降到0而产生震荡。
3. 答:PWM是脉冲宽度调速系统,它用来控制马达的转速和方向。
其方法是通过改变对电机的通电时间达到调整电机转速的目的。
具体作法是,首先根据电机转速的要求,确定占空比,即通电时间与通电周期之比,再按照通、断电时间送出控制模型,使电机按要求的转速运转。
方向是通过改变4个开关的通电状态来实现的。
4. 答:算术平均滤波每一次采样值所占的比例均相等;可用于任何场合,如压力、流量等。
加权平均滤波则每次采样值所占的比例不等,可以突出某些部分,使其所占的比例增大,但各次采样的系数总和为∑Ci=0;这种滤波主要用于那些想突出采样的某些部分的场合。
而滑动平均滤波则是每次只更新一个采样值,因而采样速度快。
此滤波主要用于实时性要求比较快的场合。
五、设计题(本题共1小题,共20分)1.答:(1)图中A/D转换为查询方式(3分)(2)写出图中8255A的地址。
(4分)G1 G2A G2B C B AP2.7 P2.6P2.5 0 P2.4 P2.3 P2.2 P2.1 P2.01 1 1 0 1 1 0 X XY6所以,8255A的地址是:F800H—FB00H(或:F8FFH—6BFFH)(3)画出实现该A/D转换的流程图如下(5分)•A/D转换程序(8分)START:MOV A,#82H ;8255初始化2分MOV DPTR,#0FB00HMOVX @DPTR.,AMOV A,#09H ;启动A/D 2分MOVX @DPTR.,AMOV DPTR,#0F900HLOOP:MOV DPTR,#0FA00HMOVX A,@DPTR ;判断转换是否结束2分ANL A,#01HJZ,LOOPDEC DPHMOVX A,@DPTR ;读A/D转换结果2分END START六、设计题(本题共1小题,共20分)答:(1)芯片4N25用来隔离(2分)(2)说明图中电机的控制原理(4分)图中,开关K0—K7为给定值,用来给定马达的转速,V=Vmax╳N/256,开关K用来控制停止(0)/启动(1)。
当PC4输出为1时,光电隔离器导通,发光二极管亮,光敏三极管导通,马达开始转动。
通过转动N,再停止N脉冲宽度调制技术,即可控制马达的速度。
(3)画出电动机控制程序流程图(4分)(4)根据流程图编写电机控制程序(8分)MAIN:MOV A,#81H ;8255初始化2分MOV DPTR,#8003HMOVX @DPTR.,ALOOP:MOV DPTR,#8002HMOVX A,@DPTR ;判断是否停止马达2分ANL A,#02HJZ,STOPSTART:MOV A,#90H ;启动马达,指示灯亮2分(MOV DPTR,#8002H)MOVX @DPTR.,AAJMP LOOPSTOP:MOV A,#00H ;停止马达,指示灯灭2分(MOV DPTR,#8002H)MOVX @DPTR.,AAJMP LOOP(5)图中4N25发光三极管的电源应单独供电?(2分)。