ARM嵌入式UART初始化程序解释
ARM开发之嵌入式开发中的S3C2410初始化

千锋嵌入式学院 最专业的嵌入式培训机构
S3C2410的初始化代码主要涉及到对系统主要 模块的配置、运行环境的建立、系统时钟、MMU 等模块的配置,下面按执行顺序依次都各个部分进 行分析
千锋嵌入式学院 最专业的嵌入式培训机构
每个页表项的内容如下: 31 20 19 8 5 4 32 1 0 Section对应的物理地址 NULL AP 0 Domain 1 C B 1 0 注:最低两位(10)是section分页的标识。
千锋嵌入式学院 最专业的嵌入式培训机构
2410 的MMU支持1级&2级地址映射,在我们目 前的应用中均采用1级section模式的地址映射,一个 section的大小为1M,也就是说从逻辑地址到物理地址 的转变是这样的一个过程:一个32位的地址,高12位 决定了该地址在页表中的index,这个index的内容决 index index 定了该逻辑section对应的物理section;低20位决定 了该地址在section中的偏移(index)。 因此从0x0~0xffffffff的地址空间总共可以分成 0x1000(4K)个section,页表中每项的大小为32个 bit,因此页表的大小为0x4000(16K)。所有示例程 序的页表统一存放在地址0x33ff8000。
千锋嵌入式学院 最专业的嵌入式培训机构
C B 具体含义 0 0 无cache,无写缓冲,任何对memory的读写都反映到ASB总线上。对memory的操作过程中CPU需要等待。 0 1 无cache,有写缓冲,读操作直接反映到ASB总线上。写操作CPU将数据写入到写缓冲后继续运行,由写缓冲进行ASB操作。 1 0 有cache,写通模式,读操作首先考虑cache hit cache cache hit;写操作时直接将数据写入写缓冲,如果同时出现cache hit cache hit,那么也更新cache。 cache 1 0 有cache,写回模式,读操作首先考虑cache hit;写操作也首先考虑cache,如果hit,则只修改cache,并将cache对应半行的dirty比特置位;如果 miss,则写入写缓冲,触发ASB总线操作。
ARM处理器系统初始化过程
ARM处理器系统初始化过程在嵌入式系统中,ARM处理器是最常用的处理器之一。
ARM处理器的系统初始化过程可以分为硬件初始化和软件初始化两个阶段。
本文将介绍ARM处理器系统初始化的具体流程。
硬件初始化在系统上电后,ARM处理器进入硬件初始化阶段。
主要任务是对处理器的外设进行初始化。
1.初始化时钟系统:ARM处理器的时钟系统是处理器运行的根底,因此在初始化过程中需要设置适当的时钟频率和时钟源。
这可以通过配置PLL〔Phase Locked Loop〕或者外部晶振来实现。
2.使能缓存:缓存是提高处理器性能的关键。
在初始化过程中,需要配置L1缓存和L2缓存的大小、映射方式等参数,并使能它们。
3.配置中断控制器:中断是处理器与外设交互的一种方式。
在初始化过程中,需要配置中断控制器,使其能够正确地响应外设发出的中断请求。
4.初始化外设:根据系统的需求,初始化各个外设,包括串口、SPI、I2C等外设。
这些外设的初始化过程涉及到设备的存放器配置、中断使能等操作。
5.设置存储器映射:ARM处理器通过存储器映射来访问外部存储器。
在初始化过程中,需要设置存储器映射表,使处理器能够正确地访问外部存储器。
软件初始化在硬件初始化完成后,ARM处理器进入软件初始化阶段。
主要任务是加载和运行操作系统及应用程序。
1.复位处理器:在软件初始化过程中,可以选择复位处理器,将处理器重新置于初始状态。
这通常通过将Reset引脚拉低来实现。
2.加载引导程序:引导程序是系统启动的第一段代码,其功能是加载操作系统的核心代码。
在软件初始化过程中,需要将引导程序加载到适当的内存位置,并设置处理器的执行起点。
3.初始化操作系统:一旦引导程序加载完成,操作系统开始初始化。
这包括初始化内核数据结构、初始化设备驱动程序、启动任务调度器等。
4.加载应用程序:在操作系统初始化完成后,可以选择加载应用程序。
应用程序的加载可以通过文件系统来实现,将应用程序从存储设备读取并加载到内存中。
嵌入式试题集(含答案)---内容简单-不够详尽

嵌⼊式试题集(含答案)---内容简单-不够详尽1、ARM微处理器有7种⼯作模式,它们分为两类⾮特权模式、特权模式。
其中⽤户模式属于⾮特权模式2、ARM⽀持两个指令集,ARM核因运⾏的指令集不同,分别有两个状态ARM 、Thumb,状态寄存器CPSR的T 位反映了处理器运⾏不同指令的当前状态3、ARM核有多个寄存器,其中⼤部分⽤于通⽤寄存器,有⼩部分作为专⽤寄存器,R15 寄存器⽤于存储PC,R13通常⽤来存储SP 。
ARM处理器有两种总线架构,数据和指令使⽤同⼀接⼝的是冯诺依曼,数据和指令分开使⽤不同接⼝的是哈佛结构4、ARM微处理器复位后,PC的地址通常是0x0 ,初始的⼯作模式是Supervisor 。
5、ARM微处理器⽀持虚拟内存,它是通过系统控制协处理器CP15 和MMU(存储管理部件)来进⾏虚拟内存的存储和管理。
当系统发⽣数据异常和指令领取异常时,异常处理程序透过嵌⼊式操作系统的内存管理机制,通过MMU交换物理内存和虚拟内存的页⾯,以保证程序正常执⾏。
6、编译链接代码时,有两种存储代码和数据的字节顺序,⼀种是⼩端对齐,另⼀种是⼤端对齐。
7、构建嵌⼊式系统开发环境的⼯具链有多种,其中开放源码的⼯具链是GNU⼯具链,ARM公司提供的⼯具链是ADS⼯具链计算机有CISC和RISC两种类型,以ARM微处理器为核⼼的计算机属于RISC类型,其指令长度是定长的8、⽬前使⽤的嵌⼊式操作系统主要有哪些?请举出六种较常⽤的。
Windows CE/Windows Mobile、VxWork、Linux、uCos、Symbian、QNX任选六9、Boot Loader在嵌⼊式系统中主要起什么作⽤?完成哪些主要的⼯作?答:Boot Loader是在嵌⼊式系统复位启动时,操作系统内核运⾏前,执⾏的⼀段程序。
通过Boot Loader,初始化硬件设备,建⽴内存和I/O空间映射图,为最终加载操作系统内核调整好适当的系统软硬件环境。
UART初始化

中断服务程序中, UxTXIF位应该清零。 UxTXIF位的操作受 UTXISEL控制位控制。
6. 向 UxTXREG寄存器加载数据(开始发送)。 如果选择了9 位发送,则加载一个字。 如果
选择了 8 位发送,则加载一个字节。 数据可以加载到缓冲器,直到 UxTXBF 状态位
(UxSTA<9>)置位为止。[/color][/color]
注意事项:在 UARTEN 位置位之前不应该置位UTXEN 位。 否则将无法使能 UART发送;
串口接收中断编程需遵循以下步骤:
1. 初始化UxBRG寄存器来获得合适的波特率 (第19.3节 “UART 波特率1:0>(UxMODE<2:1>)和STSEL(UxMODE<0>)位来设置数据位数,
停止位数和奇偶校验选择。
3. 如果需要中断,就要置位相应的中断使能控制寄存器 (IEC)中的UxRXIE位。 使用相应
中断优先级控制寄存器(IPC)中的UxTXIP<2:0> 控制位来指定该中断的优先级。 同时,
通过写 URXISEL<1:0>(UxSTA<7:6>)位选择接收中断的模式。
时,只要缓冲中有数据可读, URXDA状态位 (UxSTA<0>)就将置位。[/
4. 通过置位 UARTEN (UxMODE<15>)位,使能UART 模块。
5. 接收中断取决于 URXISEL<1:0> 控制位的设置。 如果没有允许接收中断,用户可以查询
URXDA 位。 UxRXIF位应该在 UART接收中断服务程序中清零。
6. 从接收缓冲器中读取数据。 如果选择 9 位传输,读一个字。 否则,读一个字节。 无论何
ARM初始化程序分析.
ARM学习报告001 杜云海 duyunhai@ARM映象文件及执行机理ARM学习报告0012004-5-7这几天为了弄清楚ARM系统是如何运行相应的可执行程序可谓费尽心机,整个五一假期都没有休息,其中由于烧写flash的软件出了些问题,使得理解ARM映象文件及执行机理更加曲折,不过还好在自己的努力和论坛上兄弟的帮助下,终于还是成功了。
作为进入ARM系统设计的重要一步,我觉得这个过程是应该写下来的,既是为了自己的总结,也为了后来进入ARM的人可以少走些弯路。
我的开发板配置如下:l CPU:S3C4510B芯片(ARM7TDMI核)l FLASH:1片16×1M位数据宽度的FLASH,共2M 字节Flash(MX29LV160BTC),速度70/90ns;16位模式。
l 内存SDRAM:2片4M ×16位数据宽度的SDRAM(HY57V651620B TC-10S)构成,共16M 字节SDRAM。
2片16位拼做32位使用,共用一个片选。
l 简易JTAG调试,两个串口,一个以太网口从我个人的学习经过认为,初学者最难突破的应该是以下三个方面。
所以,本文基本上从这三个方面来阐述。
l ARM映象文件(包括axf文件和bin文件)的生成和组成l 映象文件下在flash中的状态和运行时的状态(加载域和运行时域)l 地址重映射remap本文基本围绕附录给出的那个串口发送程序MySComm4510b002.mcp而展开的。
这个程序的初始化和地址重映射部分参考了twentyone的程序(http://bbs.edw.com.cn/dispbbs.asp?boardID=20&ID=27980&page=1),串口发送部分参考了sofa的程序(那我自己写了什么呢?J)。
首先我们应该建立这样一种概念,对于一个裸机(Flash里什么都没有)来说,所有的细节都得自己设置,不要指望芯片或开发工具可以为你做些什么!所以从第一条指令开始,你就必须负责所有的工作。
单片机串口初始化程序

单片机串口初始化程序1.引言1.1 概述概述:单片机串口(Universal Asynchronous Receiver/Transmitter,简称UART)是一种常见的通信接口,可以通过串口与其他设备进行数据的传输和通信。
在单片机系统中,串口的初始化是非常重要的步骤,它不仅决定了串口通信的可靠性和稳定性,还影响了单片机整体系统的性能和功能。
本文将详细介绍单片机串口初始化的程序,包括串口的基本概念、串口初始化的重要性以及实现串口初始化的方法。
通过阅读本文,读者将了解到串口初始化的必要性,了解如何在单片机系统中进行串口初始化,从而为后续的串口通信提供完善的基础。
在正式进行串口初始化之前,我们需要先了解串口的基本原理和工作原理。
串口是一种异步的通信接口,它使用起停位、数据位、校验位和波特率等参数来进行通信。
单片机通过串口与外部设备进行数据的传输和接收,可以实现与计算机、传感器、LCD显示屏等设备的数据交互。
串口初始化的重要性不容忽视。
在单片机系统中,串口通常用于与其他设备进行数据的传输和通信。
如果串口初始化不正确或不完善,可能会导致数据传输错误、通信失败甚至系统崩溃。
因此,正确地初始化串口成为了保证系统正常运行和稳定通信的关键步骤。
针对串口初始化,本文将介绍一种常用的实现方法。
这种方法需要设置串口的参数,包括波特率、数据位、校验位和停止位等。
同时,还需要配置单片机的引脚和时钟等相关参数,使其能够正确地与外部设备进行串口通信。
本文将通过代码实例的方式,详细介绍串口初始化的具体步骤和方法,供读者参考和借鉴。
总之,本文将全面介绍单片机串口初始化的程序。
通过此文,读者将深入了解串口的基本概念和工作原理,认识到串口初始化的重要性,并学习到一种常用的串口初始化实现方法。
希望本文能为读者提供有益的知识和帮助,为单片机系统的开发和应用提供参考和指导。
1.2文章结构1.2 文章结构本文旨在介绍单片机串口初始化程序的相关知识和实现方法。
ARM处理器系统初始化过程
MEMMAP有两个控制位 MEMMAP[1:0]
00BOOT装载程序模式
01User FLASH模式
10用户RAM模式
11用户外部存储器模式
10模式也就是RAM模式 我们访问地址0X00是跟访问RAM地址0X40000000中的数据是完全一样的 向RAM中写进数据 然后通过数据窗口观察0X0地址的变化 应该是同步变化的
同时有两份以上的文件交错地打印在一张纸上。像不可剥夺的资源,就一定要关闭中断,让
它占有这个资源。在ARM里,没有像x86那样有清除中断指令CLI。那么在ARM里是怎么样实现
关中断和开中断的呢?下面就来看看ARM的关中断和开中断实现。
void Lock(void)
{
stmdb sp!, {r0}
mrs r0, cpsr
(3)总线宽度
ARM微处理器架构支持8/16/32位的数据总线宽度访问存储器和外设,对于特定的存储器来说,需要设定数据总线的宽度。
(4)存储器地址的配置
ARM微处理器架构理论上可以支持4GB的地址空间,而对于一个实际的系统来说,配置的物理地址远没有这么多,因此,如何配置存储器的地址,也是一个重要的问题。
因 为ARM有7种执行状态,每一种状态的堆栈指针寄存器(SP)都是独立的。因此,对程序中需要用到的每一种模式都要给SP定义一个堆栈地址。方法是改变状 态寄存器内的状态位,使处理器切换到不同的状态,让后给SP赋值。注意:不要切换到User模式进行User模式的堆栈设置,因为进入User模式后就不 能再操作CPSR回到别的模式了,可能会对接下去的程序执行造成影响。
IMPORT main
B main
直接从启动代码跳转到应用程序的主函数入口,当然主函数名字可以由用户随便定义。
ARM9硬件接口学习之五_UART
WinCEWinCE1WinCEWinCE1ARM9硬件接口学习之五UARTARM9硬件接口学习之五 UART在没有引入UART之前,由于没有OS,我们写程序烧到开发板内执行后,并不能在程序的运行过程中打印一些提示信息告诉我们程序究竟运行了如何或者提供接口让用户去控制程序的运行路径,最后也只能通过物理现象去判断程序是否执行成功。
使用串口我们便可以实现开发板最基本的数据的发送和接收,实现同开发板的交互,控制程序的运行,并且在程序运行中打印出一些信息进行debug。
实际上bootloader和kernel的控制台(nfs模式)都是通过uart实现的。
由此我们可以发现uart在实际开发中是非常重要的。
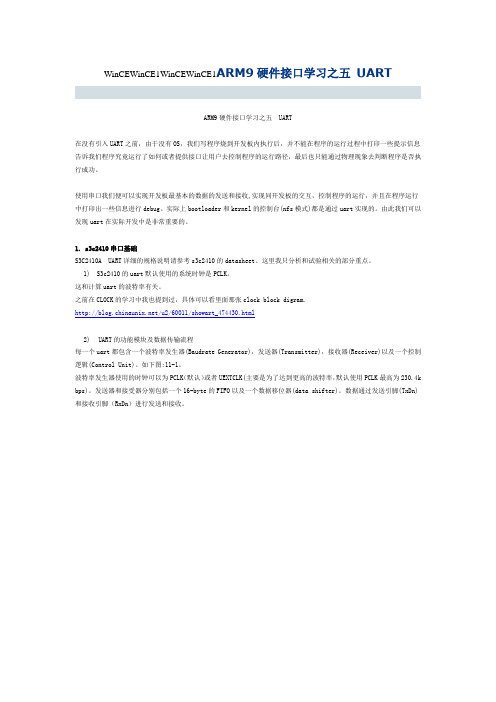
1. s3c2410串口基础S3C2410A UART详细的规格说明请参考s3c2410的datasheet。
这里我只分析和试验相关的部分重点。
1) S3c2410的uart默认使用的系统时钟是PCLK。
这和计算uart的波特率有关。
之前在CLOCK的学习中我也提到过,具体可以看里面那张clock block digram./u2/60011/showart_474430.html2)UART的功能模块及数据传输流程每一个uart都包含一个波特率发生器(Baudrate Generator),发送器(Transmitter),接收器(Receiver)以及一个控制逻辑(Control Unit)。
如下图:11-1。
波特率发生器使用的时钟可以为PCLK(默认)或者UEXTCLK(主要是为了达到更高的波特率,默认使用PCLK最高为230.4k bps)。
发送器和接受器分别包括一个16-byte的FIFO以及一个数据移位器(data shifter)。
数据通过发送引脚(TxDn)和接收引脚(RxDn)进行发送和接收。
发送数据时,CPU通过内部总线将要发送的数据写入Transmit buffer,对程序员来讲即将数据写入Transmit Holding Register(若使用FIFO Mode也是写入这个寄存器,硬件内部会自动判断)。
ARM裸机编程系列--UART
ARM裸机编程系列--UART串口设置之输入输出字符S5PV210 UART相关说明通用异步收发器简称UART,即UNIVERSAL ASYNCHRONOUS RECEIVER AND TRANSMITTER,它用来传输串行数据。
发送数据时,CPU将并行数据写入UART,UART按照一定的格式在一根电线上串行发出;接收数据时,UART检测另一根电线的信号,将串行收集在缓冲区中,CPU即可读取UART获得这些数据。
在S5PV210中,UART提供了4对独立的异步串口I/O端口,有4个独立的通道,每个通道可以工作于DMA模式或者中断模式。
其中,通道0有 256byte的的发送FIFO和256byte的接收FIFO,通道1有64byte的的发送FIFO和64byte的接收FIFO,而通道2和3只有16byte的的发送FIFO和16byte的接收FIFO。
S5PV210的uart结构图如下:S5PV210的uart结构图UART使用标准的TTL/CMCOS逻辑电平来表示数据,为了增强数据抗干扰能力和提高传输长度,通常将TTL/CMOS逻辑电平转换为RS-232逻辑电平,查看原理图可知Mini210S使用的是MAX3232SOP芯片,使用的是TX0和DX0:搜索“XuTXD0”,可知:通过设置UART相关寄存器,我们就可以驱动UART工作,达到发送和接收字符的目的。
程序例子:(完整代码见链接)/*main.c*/int main(){char c;uart_init(); // 初始化串口while (1){c = getc (); // 接收一个字符cputc(c+1); // 发送字符c+1}return 0;}在main函数中,先会调用uart_init()初始化UART,然后使用getc接收PC发过来的字符,再调用putc()将该字符+1回复给PC。
/*uart.c*/void uart_init(){// 1 配置引脚用于RX/TX功能GPA0CON = 0x22222222;GPA1CON = 0x2222;// 2 设置数据格式等UFCON0 = 0x1; // 使能FIFOUMCON0 = 0x0; // 无流控ULCON0 = 0x3; // 数据位:8, 无校验, 停止位: 1UCON0 = 0x5; // 时钟:PCLK,禁止中断,使能UART发送、接收 // 3 设置波特率UBRDIV0 = UART_UBRDIV_VAL; // 35UDIVSLOT0 = UART_UDIVSLOT_VAL; // 0x1}上述代码共有3个步骤,下面我们来一一讲解每一个步骤:第一步配置引脚用于RX/TX功能参考UART引脚连接图,我们需要设置GPA0CON和GPA1CON 寄存器使GPA0和GPA1引脚用于UART功能。
嵌入式写uart程序
嵌入式写uart程序
在嵌入式系统中,UART(Universal Asynchronous Receiver/Transmitter)是一种常用的串行通信接口。
它用于实现与外部设备之间的数据传输。
以下是一个简单的嵌入式 UART 程序示例,用于发送数据:
```c
#include <stdio.h>
#include <uart.h>
int main() {
// 初始化 UART 接口
uart_init();
// 要发送的数据
char message[] = "Hello, UART!\n";
// 发送数据
uart_send(message, strlen(message));
// 等待数据发送完成
uart_wait_send_done();
return 0;
}
```
在上述示例代码中,我们首先初始化 UART 接口。
然后,我们定义要发送的数据,并使用`uart_send`函数将数据发送到 UART 接口。
最后,我们使用`uart_wait_send_done`函数等待数据发送完成。
请注意,这只是一个简单的示例程序,实际的 UART 编程可能涉及更多的细节,例如设置波特率、数据位数、奇偶校验等。
具体的实现方式可能因所使用的嵌入式平台和编译器而有所不同。
如果你需要更详细的 UART 编程示例或帮助,请提供更多的上下文信息,例如所使用的嵌入式平台、编译器以及具体的需求。
这样我可以提供更具体的帮助和示例代码。
ARM嵌入式系统初始化过程_百度文库.
基于ARM内核微处理器的系统一般为复杂的片上系统,这种复杂系统的多数硬件模块都是可配置的,需要软件设置为特定的工作状态,因此在用户的应用程序之前,需要有一些专门的代码完成对系统的初始化。
由于这类代码直接面对ARM处理器内核和硬件控制器,一般都使用汇编语言完成。
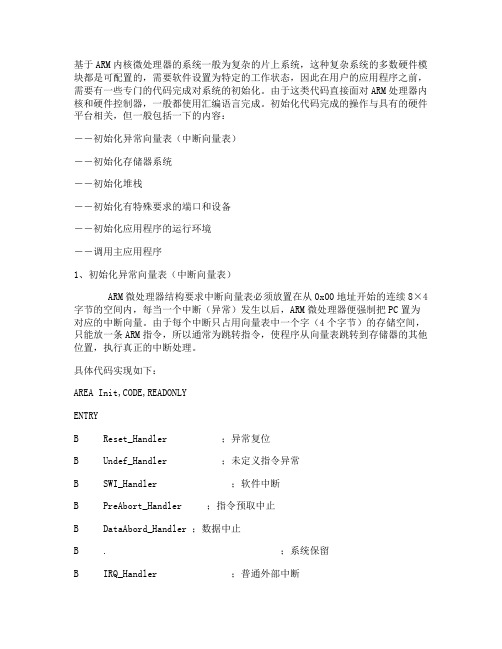
初始化代码完成的操作与具有的硬件平台相关,但一般包括一下的内容:--初始化异常向量表(中断向量表)--初始化存储器系统--初始化堆栈--初始化有特殊要求的端口和设备--初始化应用程序的运行环境--调用主应用程序1、初始化异常向量表(中断向量表)ARM微处理器结构要求中断向量表必须放置在从0x00地址开始的连续8×4字节的空间内,每当一个中断(异常)发生以后,ARM微处理器便强制把PC置为对应的中断向量。
由于每个中断只占用向量表中一个字(4个字节)的存储空间,只能放一条ARM指令,所以通常为跳转指令,使程序从向量表跳转到存储器的其他位置,执行真正的中断处理。
具体代码实现如下:AREA Init,CODE,READONLYENTRYB Reset_Handler ;异常复位B Undef_Handler ;未定义指令异常B SWI_Handler ;软件中断B PreAbort_Handler ;指令预取中止B DataAbord_Handler ;数据中止B . ;系统保留B IRQ_Handler ;普通外部中断B FIQ_Handler ;快速外部中断..........2、初始化存储器系统主要是对系统存储器控制器(MMU)的初始化。
由于存储器控制器并不是ARM架构的一部分,不同芯片的实现方式各不相同。
由于运算能力和寻址能力的强大,基于ARM内核的微处理器系统一般都需要外扩展各种类型的存储器。
对于存储器系统的初始化一般包括如下几个方面:--存储器类型、时序和总线宽度的配置--存储器地址的配置(1)存储器类型基于ARM微处理系统的存储器一般有如下几类:SARM,DRAM,Flah,同时,即使同类存储器也有访问速度上的不同。
ARM初始化
5.2 Bootloader概述(ɡài shù)
❖ 2. Boot Loader 的装置媒介〔Installation Medium〕
❖ 系统加电或复位后,一切的 CPU 通常都从某个由 CPU 制造商预先布置的地址上取指令。比如,基于
ARM7TDMI core 的 CPU 在复位时通常都从地址 0x00000000 取它的第一条指令。而基于 CPU 构建的嵌 入式系统通常都有某种类型的固态存储设备(比如:ROM、 EEPROM 或 FLASH 等)被映射到这个预先布置的地址上。 因此在系统加电后,CPU 将首先执行 Boot Loader 顺序 (shùnxù)。
第九页,共41页。
5.2 Bootloader概述(ɡài shù)
❖ 1. Boot Loader 所支持的 CPU 和嵌入式板
❖ 每种不同的 CPU 体系结构都有不同的 Boot Loader。有 些 Boot Loader 也支持多种体系结构的 CPU,比如 UBoot 就同时支持 ARM 体系结构和MIPS 体系结构。
ARM初始化
2021/11/9
第一页,共41页。
Hale Waihona Puke 总结(zǒngjié)ARM汇编程序设计
掌握ARM汇编规范
掌握ARM指令的汇编程序设计 掌握汇编语言与C语言的混合编程
第二页,共41页。
第5 章
ARM初始化进程 (jìnchéng)剖析
第三页,共41页。
本章(běn zhānɡ)目的
了解(liǎojiě)ARM初始化进程 熟习(shúxí)BootLoader的完成原理
❖ 3.RAM 初始化。
❖ 包括正确地设置系统的内存控制器的功用寄存器以及各内 存库控制寄存器等。
嵌入式复习题含全部答案

嵌入式系统复习题一、填空题:1、试列举三种主流的嵌入式处理器:( ARM )、( MIPS )、(PowerPC)。
2、ARM处理器共有(37)个寄存器,其中包括(31个通用寄存器)和(6个状态寄存器)。
3、寄存器R13在ARM指令中(堆栈指针SP )。
R14也称(程序连接寄存器LR)在程序里的作用是(程序计数器PC的备份)。
当发生中断或异常时,对应分组寄存器分别是(R14_svc、R14_irq、R14_fiq、R14_abt和R14_und用来保存R15的返回值)。
4、ARM微处理器支持两种指令集:(ARM)和(Thumb)。
5、寄存器R15用作(程序计数器PC)。
该寄存器在ARM状态下,(位[1:0]为00),位[31:2]用于保存PC;在Thumb状态下,(位[0]为0),位[31:1]用于保存PC。
6、CPSR用作( 状态寄存器 ),CPSR可在任何运行模式下被访问。
每一种运行模式下又都有一个专用的物理状态寄存器,称为(程序状态保存寄存器SPSR)。
7、Thumb状态下的寄存器集是ARM状态下寄存器集的一个子集,程序可以直接访问的通用寄存器是(R0—R7,PC,SP,LR,CPSR)。
8、ARM指令中条件执行功能是通过(指令中添加条件码)来实现的,包含的条件码位于指令的最高(四)位。
9、试列举五种以上常见的嵌入式操作系统:(μC/OS-II)、(Vxworks)、(WinCE)、(Linux/μCLinux)、(PalmOS)。
10、计算机结构中,哈佛结构和冯?诺依曼结构的主要区别是(指令与数据分开),ARM7采用(冯?诺依曼结构),ARM9采用(哈佛结构)。
11、ARM处理器采用(Thumb指令)操作来访问SFR。
<SFR内部寄存器>12、在ARM汇编语言程序设计中,语句一般是由(指令操作码)、(指令的条件码)、(目标寄存器编码)和(包含第一个操作数的寄存器编码)组成。
二、名词解释:1、ARM处理器:先进的RISC指令集处理器。
ARM嵌入式系统初始化过程.
基于ARM内核微处理器的系统一般为复杂的片上系统,这种复杂系统的多数硬件模块都是可配置的,需要软件设置为特定的工作状态,因此在用户的应用程序之前,需要有一些专门的代码完成对系统的初始化。
由于这类代码直接面对ARM处理器内核和硬件控制器,一般都使用汇编语言完成。
初始化代码完成的操作与具有的硬件平台相关,但一般包括一下的内容:--初始化异常向量表(中断向量表)--初始化存储器系统--初始化堆栈--初始化有特殊要求的端口和设备--初始化应用程序的运行环境--调用主应用程序1、初始化异常向量表(中断向量表)ARM微处理器结构要求中断向量表必须放置在从0x00地址开始的连续8×4字节的空间内,每当一个中断(异常)发生以后,ARM微处理器便强制把PC置为对应的中断向量。
由于每个中断只占用向量表中一个字(4个字节)的存储空间,只能放一条ARM指令,所以通常为跳转指令,使程序从向量表跳转到存储器的其他位置,执行真正的中断处理。
具体代码实现如下:AREA Init,CODE,READONLY //初始化ENTRYB Reset_Handler //异常复位B Undef_Handler //未定义指令异常B SWI_Handler //软件中断B PreAbort_Handler //指令预取中止B DataAbord_Handler //数据中止B . //系统保留B IRQ_Handler //普通外部中断B FIQ_Handler //快速外部中断..........2、初始化存储器系统主要是对系统存储器控制器(MMU)的初始化。
由于存储器控制器并不是ARM 架构的一部分,不同芯片的实现方式各不相同。
由于运算能力和寻址能力的强大,基于ARM内核的微处理器系统一般都需要外扩展各种类型的存储器。
对于存储器系统的初始化一般包括如下几个方面:--存储器类型、时序和总线宽度的配置--存储器地址的配置(1)存储器类型基于ARM微处理系统的存储器一般有如下几类:SARM,DRAM,Flah,同时,即使同类存储器也有访问速度上的不同。
uart的基本编程步骤

uart的基本编程步骤UART(通用异步收发传输)是一种常见的串行通信协议,用于在微控制器和外部设备之间进行数据传输。
下面是UART的基本编程步骤:1. 初始化UART,首先,你需要在微控制器上初始化UART模块。
这通常涉及设置波特率(通信速率)、数据位、停止位和校验位等参数。
这些参数的设置取决于你的具体应用需求和外部设备的要求。
2. 配置引脚,UART通常使用两个引脚进行数据传输,一个用于发送(TX),一个用于接收(RX)。
你需要在微控制器上配置这些引脚,并确保它们与外部设备正确连接。
3. 发送数据,要发送数据,你需要将要发送的数据加载到UART发送缓冲区。
一旦数据被加载,UART模块将自动开始发送数据。
你需要确保发送的数据符合UART的规范,并且在发送数据之前,需要检查发送缓冲区是否为空,以避免数据丢失。
4. 接收数据,接收数据与发送类似,你需要设置接收缓冲区,并在接收到数据后从中读取数据。
同样,你需要检查接收缓冲区是否有新的数据可用,以避免数据丢失。
5. 中断处理(可选),在一些情况下,你可能需要使用中断来处理UART的发送和接收。
这可以帮助你及时响应数据的到来或发送完成等事件。
6. 错误处理,最后,你需要考虑如何处理可能出现的错误,比如数据丢失、校验错误等。
这可能涉及到错误标志的检查和相应的处理流程。
总的来说,UART的基本编程步骤包括初始化UART模块、配置引脚、发送数据、接收数据、中断处理(可选)和错误处理。
在实际编程中,你需要根据具体的微控制器型号和外部设备的通信协议要求来进行相应的设置和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
UART初始化程序解释
姓名:xxx
学号:20185228000
0x4004 8080) 位描述
复位值
允许I/O 配置模块的时钟0 12允许UART 的时钟0
0x4004 8098) 位描述
复位值
0x00
DIV 的值为0x0 可以关
UART相关寄存器配置
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<16); // 使能IOCON时钟LPC_IOCON->PIO1_6 &= ~0x07;
LPC_IOCON->PIO1_6 |= 0x01; //把P1.6脚设置为RXD
LPC_IOCON->PIO1_7 &= ~0x07;
LPC_IOCON->PIO1_7 |= 0x01; //把P1.7脚设置为TXD
LPC_SYSCON->SYSAHBCLKCTRL &= ~(1<<16); // 禁能IOCON时钟
LPC_SYSCON->UARTCLKDIV = 0x1;//时钟分频值为1
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<12);//允许UART时钟
复位值0
00x4000 800C)
0x4000 800C)
复位值
0奇校验。
发送字符和附带的校验位中1 的个数为奇数Array
偶校验。
发送字符和附带的校验位中1 的个数为偶数
0x4000 800C)
复位值
0 U0LCR[6] 为高电平有效时,输出
复位值UART除数锁存LSB寄存器与U0DLM寄存器一0x010
0x4000 8000 当DLAB = 1) 位域描述
UART 除数锁存是UART 波特率发生器的一部分,并且保持使用的值,与分数分频器一起对UART_PCLK 时钟分频来产生波特率时钟,波特率时钟是波特率的16 倍。
U0DLL 和U0DLM 寄存器一起构成一个16 位除数,其中U0DLL 包含除数的低8 位,U0DLM 包含除数的高8 位;值0x0000 被看作是0x0001,因为除数是不允许为0。
当访问UART 除数锁存寄存器时,U0LCR 中的除数锁存访问位(DLAB)必须为1
复位值UART除数锁存MSB寄存器与U0DLL寄存器一0x000
0x4000 8004 当DLAB = 1) 位域描述
0x4000 8008, 只写) 位域描述
复位
值
U0FCR 控制UART0 RX 和TXFIFOs 的操作。
0x4000 8008, 只写) 位域描述
复位
值
U0FCR 控制UART0 RX 和TXFIFOs 的操作。
相关寄存器配置及波特率计算
LPC_UART->LCR = 0x83; //8位传输,1个停止位,无几偶校验,允许访问除数锁
; //计算该波特率要求的除数锁存寄
//写除数锁存器高位值
//写除数锁存器低位值
DLM 和DLL 为标准UART 波特率除数寄存器。
UART相关寄存器配置
void UART_init(uint32_t baudrate)
{
uint32_t DL_value;
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<16); // 使能IOCON时钟
LPC_IOCON->PIO1_6 &= ~0x07;
LPC_IOCON->PIO1_6 |= 0x01; //把P1.6脚设置为RXD
LPC_IOCON->PIO1_7 &= ~0x07;
LPC_IOCON->PIO1_7 |= 0x01; //把P1.7脚设置为TXD
LPC_SYSCON->SYSAHBCLKCTRL &= ~(1<<16); // 禁能IOCON时钟
LPC_SYSCON->UARTCLKDIV = 0x1;//时钟分频值为1
LPC_SYSCON->SYSAHBCLKCTRL |= (1<<12);//允许UART时钟
LPC_UART->LCR = 0x83; //8位传输,1个停止位,无几偶校验,允许访问除数锁存器DL_value= SystemCoreClock/16/baudrate; //计算该波特率要求的除数锁存寄存器值LPC_UART->DLM = DL_value/ 256;//写除数锁存器高位值
LPC_UART->DLL = DL_value% 256;//写除数锁存器低位值
LPC_UART->LCR = 0x03; //DLAB置0
LPC_UART->FCR = 0x07; //允许FIFO,清空RxFIFO和TxFIFO
}
谢谢观看。