基于PLC的工业机械手控制系统设计
基于S7-300 PLC的一种工业机械手控制系统设计
pli yng S7—3 0 C n r y t t y tm o r 0 PL co tols sem, he s se fhadwa e de i a of r de in r sgn nd s t e wa sg Ke wors: y d manp a o , —3 C c tol iult rS7 00 PL onr
,
了 系统 的硬 件 设 计 和 软 件设 计 。
关 键 词 :Biblioteka 械 手 , 7 3 0 P C控 制 机 S — 0 L
Absr t tac
I a hr n t ee—p s a mo o a c l er o p e o idu til o t ha e c t r nd yi nd c m os d f n sra r bos worig kn pr cil i a als d n hs i pe s n y e i ti pap ap n er —
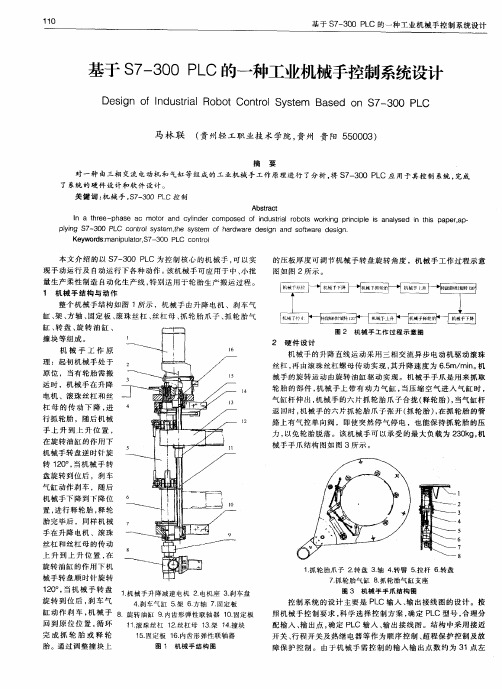
械 手 手 爪 结 构 图 如 图 3所 示 。
1
盘 旋 转 到 位后 ,刹 车 气 缸 动 作 刹 车 , 随后 机 械 手 下 降 到 下 降位
置 , 行 释 轮 胎 , 轮 进 释 胎 完 毕 后 ,同 样机 械
手 在 升 降 电机 、滚 珠
丝 杠 和 丝 杠母 的传 动 上 升到 上升 位置 , 在 旋 转 油缸 的作 用 下 机 械 手 转 盘 顺 时针 旋 转 1 O , 机 械 手 转 盘 2 。当
图 2 机械 手 工作 过 程 示 意 图
撞块等组成。 机 械 手 工 作 原
理 :起 初 机 械 手处 于
原 位 , 当有 轮 胎需 搬
2 硬 件 设 计
机 械 手 的 升 降 直线 运 动 采 用 三 相 交 流 异 步 电 动 机驱 动 滚 珠 丝杠 , 由滚 珠 丝 杠 螺母 传动 实 现 , 升 降 速 度 为 65 mi。 再 其 .m/ n 机 械 手 的旋 转 运 动 由旋 转 油 缸 驱 动 实 现 。机 械 手 手爪 是用 来 抓 取
基于PLC机械手控制系统设计
基于PLC机械手控制系统设计工业机械手是一种高科技自动化生产设备,也是工业机器人的一个重要分支。
它通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。
机械手作业的准确性和在各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。
机械手技术涉及到力学、机械学、电气液压技术、自动控制技术、传感器技术和计算机技术等科学领域,是一门跨学科综合技术。
通用机械手是一种能够独立按程序控制实现重复操作的机械手,适用范围比较广。
由于通用机械手能够很快地改变工作程序,适应性较强,因此在不断变换生产品种的中小批量生产中得到了广泛的应用。
机械手的发展得益于其积极作用:一方面,它能够部分代替人工操作;另一方面,它能够按照生产工艺的要求,遵循一定的程序、时间和位置来完成工件的传送和装卸;还能够操作必要的机具进行焊接和装配,从而改善了工人的劳动条件,显著提高了劳动生产率,加快了实现工业生产机械化和自动化的步伐。
因此,机械手受到了很多国家的重视,投入了大量的人力物力来研究和应用。
尤其是在高温、高压、粉尘、噪音以及带有放射性和污染的场合,机械手的应用更为广泛。
近年来,在我国也有较快的发展,并取得了一定的效果,受到了机械工业的关注。
机械手是一种能够自动控制并可重新编程以变动的多功能机器,具有多个自由度,可以搬运物体以完成在不同环境中的工作。
随着工业技术的发展,机械手的结构形式开始比较简单,专用性较强。
但现在,制成了能够独立按程序控制实现重复操作,适用范围比较广的通用机械手。
本文介绍了机械手的分类和应用,其中第一类是通用机械手,可以根据任务需要编制程序完成各项规定工作。
本项目要求设计的机械手模型也属于这一类,通过设计可以增强对工业机械手的认识,并熟悉掌握PLC技术、位置控制技术、气动技术等工业控制常用的技术。
机械手控制系统的设计步骤包括确定被控系统必须完成的动作和它们之间的关系、分配输入输出设备、设计PLC用户程序、对程序进行调试和修改,最后保存已完成的程序。
基于PLC的机械手控制系统设计任务书

基于PLC的机械手控制系统设计任务书任务书设计目标:设计一个基于PLC的机械手控制系统,能够实现对机械手的精确控制和操作。
系统能够完成各种复杂的任务,如物料的搬运、装配和堆垛等。
设计要求:1.系统应具备自动化控制功能,能够通过PLC对机械手进行控制。
2.系统应支持多种控制模式,如手动控制、自动控制和远程控制等。
3.系统应能够实现对机械手各个关节的精确控制,保证操作的准确性和稳定性。
4.系统应具备自诊断和故障检测能力,能够对机械手的状态进行实时监测和报警。
5.系统应具备良好的反应速度,能够快速响应用户的指令和要求。
6.系统应采用可靠的通信协议和接口,能够与其他设备和系统进行数据交互。
7.系统应具备良好的人机交互界面,易于操作和使用。
8.系统应具备扩展性和可升级性,能够满足未来的需求和变化。
设计内容:1.系统硬件设计:a)选择适合的PLC控制器和电机驱动器,满足系统要求。
b)设计机械手的结构和传动装置,考虑机械手的工作范围和载荷要求。
c)选择合适的传感器和执行器,用于机械手的位置检测和动作执行。
d)设计电源和电气控制部分,提供稳定可靠的电力供应。
e)设计安全保护装置,确保系统和人身安全。
2.系统软件设计:a)编写PLC控制程序,实现机械手的各种动作和控制模式。
b)设计人机交互界面,使操作人员能够方便地对机械手进行控制和监测。
c)实现系统的自诊断和故障检测功能,能够及时发现和排除故障。
d)设计远程控制和数据交互功能,使系统能够与其他设备和系统进行联动。
3.系统测试和验收:a)对系统进行各种功能和性能测试,确保系统能够满足设计要求。
b)进行系统集成测试,验证系统与其他设备和系统的接口和兼容性。
c)完成系统的文档编写和培训,使用户能够方便地使用和维护系统。
d)按照用户需求和要求进行现场验收和调试,确保系统正常运行。
4.系统实施和推广:a)根据用户需求和场地情况,对系统进行布局和安装。
b)组织人员进行系统使用和维护培训,使用户能够熟练使用系统。
基于PLC机械手控制系统设计

2024-04-29
• 项目背景与意义 • 整体方案设计 • 硬件选型 • 程序设计 • PLC仿真 • 项目总结与展望
目录
Part
01
项目背景与意义
机械手控制系统优势
效率高、准确高
高生产自动化程度,有利于 提高材料的传送、工件的装 卸、刀具的更换以及机器的 装配等的自动化程度,提高 生产效率,降低生产成本
改善劳动条件
避免人身事故,代替人安全 地在高温、高压、低温、低 压、有灰尘、噪声、臭味、 有放射性或有其它毒性污染 以及工作空间狭窄等场合中 完成工作。
自动化程度高,成本低
采用PLC控制系统,实现远 程监控和自动调节,提高运 维效率,降低了人工成本。
Part
02
整体方案设计
系统硬件设计
plc选型 机械手的位置反馈是开关量控制,所需的I/0点数量并不多,所以使用一般 的小型plc的选择就可以了。由于所需要的 I/0 点数分别为 20 点和12 点, 因此本设计选用西门子S7-226来实现控制
2)通过下面一排拉杆模拟PLC输入信号,通过观察Q点输出亮灯情况检查程序。
组态制作
新建一个工程,触摸屏的类型选择TPC7062TD
2)制作主页面。
组态制作
在设备窗口中添加-通用串口父设备和西门子_S7200PPI
2)双击西门子_S7200PPI,增加设备通道,并且连接对应的数据库,是PLC与触摸屏互相通信。
Part
03
硬件选型
plc硬件接线图简图
选型与配置方案
PLC控制器
使用一般的小型plc的选择就可以 了。由于所需要的 I/0 点数分别 为 20 点和12 点,因此本设计选 用西门子S7-226来实现控制。
《2024年基于PLC的工业机械手运动控制系统设计》范文

《基于PLC的工业机械手运动控制系统设计》篇一一、引言随着工业自动化技术的不断发展,机械手运动控制系统在工业生产中扮演着越来越重要的角色。
传统的机械手控制系统通常采用单片机或嵌入式系统进行控制,但由于其处理能力和稳定性的限制,已经无法满足现代工业生产的高效、精确和可靠的要求。
因此,本文提出了一种基于PLC(可编程逻辑控制器)的工业机械手运动控制系统设计。
该系统采用先进的PLC技术,能够有效地提高机械手的控制精度、稳定性和可靠性,满足现代工业生产的需求。
二、系统设计1. 硬件设计本系统硬件部分主要包括PLC控制器、机械手本体、传感器、执行器等部分。
其中,PLC控制器是整个系统的核心,采用高性能的PLC模块,能够实现对机械手的精确控制。
机械手本体包括手臂、手腕、抓手等部分,通过执行器进行驱动和控制。
传感器则用于检测机械手的运动状态和位置信息,为控制系统的精确控制提供支持。
2. 软件设计软件部分是整个系统的关键,它决定了机械手的运动方式和控制精度。
本系统采用PLC编程软件进行程序设计,通过编写梯形图或指令代码来实现对机械手的控制。
程序包括主程序和控制程序两部分。
主程序负责控制整个系统的运行流程,而控制程序则负责实现对机械手的精确控制。
3. 控制策略本系统采用基于位置的控制策略,通过传感器实时检测机械手的位置信息,将位置信息与目标位置进行比较,计算出位置偏差,并通过执行器对机械手进行精确的控制。
同时,系统还具有速度控制和力控制等功能,能够根据实际需求进行灵活的调整和控制。
三、系统实现1. 硬件连接硬件连接是整个系统实现的基础。
首先需要将PLC控制器与机械手本体、传感器、执行器等部分进行连接,确保各部分之间的通信和信号传输畅通。
同时,还需要对硬件设备进行调试和测试,确保其正常工作。
2. 程序设计程序设计是整个系统的核心部分。
根据实际需求和机械手的运动特性,编写相应的梯形图或指令代码,实现对机械手的精确控制。
《基于plc的工业机械手运动控制系统设计》开题报告

(5)根据控制系统的控制要求和所选PLC的I/O点的情况及高功能模块的情况,设计PLC用户程序,此时可采用梯形图、助记符或流程图语言的用户程序。PLC的用户程序体现了按照正确的顺序所要求的全部功能及其相互相关,编程时可用编程器或者计算机直接编程、修改,同时也可对PLC的工作状态、特殊功能进行设定。
由于劳力成本的逐步增加以及许多工厂和加工中心工作环境恶劣,采用机械手代替工人进行上下料必然会成为未来的一种发展趋势。欧美等发达国家早已采用机械手来代替人工上下料,从毛坯到加工成成品,整套生产线全部采用机械手来完成,己成为现代加工生产技术的主流发展方向。
三、研究内容、预计创新点和难点
在制造机械制造行业中机器人的更新换代,还有技术发展还是很快的。在本次设计中,设计了机械手控制系统,这样一个机器人的控制系统,该系统使用PLC可编程控制器,详细的介绍了通过PLC控制机械手运动的建模过程,通过这些编程还有设计能够达成的一些功能,实现机械手的运动。
(6)对所设计的PLC程序进行调试和修改,直至PLC完全实现系统所要求的控制功能。
五、主要参考文献
[1] 崔屹嵘, 吕栋腾. 晶圆机械手PLC控制系统的设计与实现[J]. 自动化与仪器仪表, 2019(10):26-29.
[2] 温毅, 李哲宇, 康文凯,等. 一种基于PLC的机械手控制系统设计[J]. 科技视界, 2020(15):3.
(2)被控系统基本动作有上升、下降、左转、右转、加紧、放松。本设计初步设想完成一次单循环机械手需完成八个顺序动作,确定这些动作之间的关系及完成这些动作的顺序。
(3)分配输入、输出设备,即确定哪些外围设备是送信号给PLC的,哪些外围设备是接受来自PLC的信号的,同时还要将PLC的输入、输出点与之一一对应,对I/O进行分配。在此基础上确定PLC的选型,本设计所选择的是西门子S7-200系列PLC
基于PLC的机械手控制系统设计

基于PLC的机械手控制系统设计摘要本文基于PLC的机械手控制系统设计实现了对机械手的自动控制,为机械手的工业应用提供了强有力的支撑。
文章首先介绍了机械手的概念、类型和特点,然后详细讲述了机械手控制系统的工作原理和设计实现。
通过实验验证,本文所设计的机械手控制系统可以实现对机械手的自动化控制和动作规划,具有较高的安全性和稳定性,同时具有广泛的适用性和可扩展性。
本文的研究成果对机械手的应用推广具有较大的意义。
关键词:PLC,机械手,控制系统,自动化控制,动作规划AbstractThis paper designs a mechanical arm control system based on PLC, which realizes the automatic control of the mechanical arm and provides strong support for the industrial application of the mechanical arm. This paper first introduces the concept, types and characteristics of mechanical arms, and then describes in detail the working principle and design implementation of mechanical arm control systems.Through experimental verification, the mechanical arm control system designed in this paper can achieve the automatic control and motion planning of the mechanical arm, with high safety and stability, as well as wide applicability and scalability. The research results of this paper have great significance for the application promotion of mechanical arms.Keywords: PLC, mechanical arm, control system, automaticcontrol, motion planning第一部分:引言随着工业无人化趋势的深入发展,机械手作为工业自动化的重要机器人之一,已经被广泛应用于工业制造、装配、取料、搬运等场景中。
基于plc控制的机械手设计

基于PLC控制的机械手设计引言PLC(可编程逻辑控制器)是一种被广泛应用于工业自动化系统的控制器。
它以可编程的方式控制工业过程中的各种设备和机械。
机械手是一种常见的自动化设备,广泛应用于工业领域。
本文将介绍基于PLC控制的机械手设计,包括系统的硬件组成、PLC程序设计和系统的工作原理。
硬件组成基于PLC控制的机械手系统包括以下硬件组成部分:1.PLC控制器:PLC控制器是系统的核心部分,负责接收和处理输入信号,并控制输出设备的操作。
常见的PLC控制器有西门子、施耐德等品牌。
2.机械手:机械手是系统的执行部分,负责完成各种任务,如抓取、搬运等。
它通常由电动机、传动装置、执行器等组成。
3.传感器:传感器用于检测和监测系统的状态和环境变量。
常见的传感器有接近传感器、压力传感器、温度传感器等。
4.输入设备:输入设备用于向系统提供操作信号和参数设置,如按钮、开关等。
5.输出设备:输出设备用于显示系统状态或输出结果,如指示灯、显示屏等。
PLC程序设计PLC程序是由一系列指令组成的,用于控制PLC控制器。
以下是基于PLC控制的机械手系统的PLC程序设计步骤:1.确定系统的需求和功能:首先需要确定机械手的具体需求和功能,如抓取物体的方式、搬运的速度等。
2.设计输入和输出信号:根据系统需求,确定输入和输出信号的类型和数量。
输入信号可以是按钮的状态、传感器的检测结果等,输出信号可以控制机械手的运动和执行动作。
3.设计PLC程序逻辑:根据系统需求和硬件组成,设计PLC程序的逻辑。
逻辑可以使用Ladder Diagram、Function Block Diagram等可视化编程语言进行描述。
4.编写PLC程序:根据设计的逻辑,使用PLC编程软件编写PLC程序。
编写过程中需要考虑安全性、可靠性和性能等方面。
5.调试和测试:将编写好的PLC程序下载到PLC控制器中,并进行调试和测试。
调试过程中需要检查各个输入和输出设备是否正常工作,是否满足系统的需求和功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于PLC的工业机械手控制系统设计摘要机械手是工业自动化领域中经常遇到的一种控制对象。
近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。
机械手广泛地应用与锻压、冲压、锻造、焊接、装配、搬运、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。
本设计描述了基于PLC的机械手控制系统设计,重点介绍了机械手控制系统中的硬件选择方法,软件的设计过程,以及PLC控制装置的工作过程。
本设计实现了机械手在搬运装配线上,通过S7-200PLC控制机械手完成从A传送带搬运物件至B传送带中,然后进入下一个工作流程。
机械手的上升/下降和左转/右转的执行,分别由双线圈二位电磁阀控制气缸的运动实现;夹紧/放松则是由单线圈的二位电磁阀控制气缸的运动来实现。
【关键词】机械手;PLC;电磁阀Based on plc industrial manipulator control system designAbstractIn the field of industrial automation manipulator is often met in a control object. In recent years, with the development of industrial automation manipulator gradually become a new subject, and with the rapid development. Manipulator widely application and forging, stamping, forging, welding, assembling, handling, spray paint, heat treatment, etc. Especially in heavy, high temperature, toxic and dangerous, radioactive, dust and so on bad work environment, manipulator because of its significant advantages by pay special attention to. In a word, the manipulator is to improve the labor productivity, improve working conditions, reduce labor intensity and realize industrial production automation is an important means.This design based on PLC describes the manipulator control system design, introduced the manipulator control system, the hardware selection method, the software design process, and the working process of the PLC control device.The design and implementation of the manipulator in the handling assembly line, manipulator controlled by the S7-200PLC complete conveyor belt carrying objects from A to B conveyor, and then go to the next workflow. The implementation of the up / down and left / right of the manipulator, respectively, to achieve control movement of the cylinder by a double coil solenoid valve; clamp / unclamp cylinder is controlled by a single coil solenoid valve movement.【Key Words】Manipulator;PLC;solenoid valve目录摘要 (1)目录 (4)第1章绪论 (1)1.1 课题的目的和意义 (1)1.2 课题研究的内容 (1)第2章机械手和PLC (2)2.1 机械手 (2)2.1.1 机械手的概述 (2)2.1.2 机械手的应用 (2)2.1.3 机械手的应用意义 (3)2.1.4 机械手的发展概况 (4)2.1.5 机械手的发展趋势 (4)2.2 PLC (5)2.2.1 PLC的基本概念 (5)2.2.2 PLC的组成 (6)2.2.3 PLC的主要特点 (7)2.2.4 PLC的工作原理 (8)2.2.5 PLC的应用领域 (10)第3章机械手控制系统的设计 (12)3.1 机械手控制系统构件概述 (12)3.2 系统控制对象及工艺过程 (14)3.3 控制要求 (16)3.4 方案选择及系统配置 (16)3.5 PLC的硬件设计 (17)3.5.1 PLC的选型 (17)3.5.2 I/O的资源配置 (18)3.5.3 PLC的接线图 (19)3.5.4 操作面板 (20)3.6 系统软件设计 (21)3.6.1 顺序功能图 (21)3.6.2 全程序OB1 (23)3.6.3 公用程序 (25)3.6.4 手动程序 (25)3.6.5 自动程序 (26)3.6.6 回原点程序 (31)第4章系统程序调试 (35)4.1 控制系统的程序调试步骤 (35)4-2 调试过程中注意的事项 (35)4-3 系统中调试结果 (36)第五章结束语 (40)参考文献 (41)致谢 (412)第1章绪论1.1 课题的目的和意义机械手是工业自动化领域中经常遇到的一种控制对象。
近年来随着工业自动化的发展机械手逐渐成为一门新兴学科,并得到了较快的发展。
机械手广泛地应用与锻压、冲压、锻造、焊接、装配、机加、喷漆、热处理等各个行业。
特别是在笨重、高温、有毒、危险、放射性、多粉尘等恶劣的劳动环境中,机械手由于其显著的优点而受到特别重视。
总之,机械手是提高劳动生产率,改善劳动条件,减轻工人劳动强度和实现工业生产自动化的一个重要手段。
国内外都十分重视它的应用和发展。
可编程序控制器(programmable logic controller,PLC)是专为在工业环境下应用而设计的实时工业控制装置。
随着微电子技术、自动控制技术和计算机通信技术的飞速发展,PLC 在硬件配置、软件编程、通讯联网功能以及模拟量控制等方面均取得了长足的进步,已经成为工厂自动化的标准配置之一。
由于自动化可以节省大量的人力、物力等,而PLC也具有其他控制方式所不具有的特殊优越性,如通用性好、实用性强、硬件配套齐全、编程方法简单易学,因此工业领域中广泛应用PLC。
机械手在美国、加拿大等国家应用较多,如用果实采摘机械手来摘果实、装配生产线上应用智能机器人等。
我国自动化水平本身比较低,因此用PLC来控制的机械手还比较少。
本次课题设计的机械手就是通过PLC来实现自动化控制的。
通过此次设计可以更进一步学习PLC的相关知识,了解世界先进水平,尽可能多的应用于实践。
1.2 课题研究的内容本课题主要研究的是基于PLC的机械手模型控制系统的设计,包括硬件的设计和软件的设计。
通过设计编写PLC程序实现机械手模型控制系统的自动控制。
第2章机械手和PLC2.1 机械手2.1.1 机械手的概述它能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。
它可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用于机械制造、冶金、电子、轻工和原子能等部门。
机械手主要由手部、运动机构和控制系统三大部分组成。
手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。
运动机构的升降、伸缩、旋转等独立运动方式,称为机械手的自由度。
为了抓取空间中任意位置和方位的物体,需有6个自由度。
自由度是机械手设计的关键参数。
自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。
一般专用机械手有2~3个自由度。
机械手的种类,按驱动方式可分为液压式、气动式、电动式、机械式机械手;按适用范围可分为专用机械手和通用机械手两种;按运动轨迹控制方式可分为点位控制和连续轨迹控制机械手等。
机械手通常用作机床或其他机器的附加装置,如在自动机床或自动生产线上装卸和传递工件,在加工中心中更换刀具等,一般没有独立的控制装置。
有些操作装置需要由人直接操纵,如用于原子能部门操持危险物品的主从式操作手也常称为机械手。
机械手在锻造工业中的应用能进一步发展锻造设备的生产能力,改善热、累等劳动条件。
2.1.2 机械手的应用在现代工业中,生产过程的机械化、自动化已成为突出的主题。
在机械工业中,加工、装配等生产是不连续的。
专用机床是大批量生产自动化的有效办法,程控机床、数控机床、加工中心等自动化机械是有效解决多品种小批量生产自动化的重要办法。
但除切削加工本身外,还有大量的装卸、搬运、装配等作业,有待于进一步实现机械化。
据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。
从这里可看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。
机械手可在空间抓放物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,广泛应用于柔性自动线。
国内外机械工业、铁路部门中机械手主要应用于以下几方面:1.热加工方面的应用热加工是高温、危险的笨重体力劳动,很久以来就要求实现自动化。
为了提高工作效率,和确保工人的人身安全,尤其对于大件、少量、低速和人力所不能胜任的作业就更需要采用机械手操作。
2.冷加工方面的应用冷加工方面机械手主要用于柴油机配件以及轴类、盘类和箱体类等零件单机加工时的上下料和刀具安装等。