鞭炮自动洗筒机结构设计剖析
便携式炮管擦洗机器人设计
序图。通过上述时序控制,可实现炮管擦洗机器 人步进式前后运动和复合擦洗运动。
图 5 炮管擦洗机器人控制系统硬件构成
图 3 直线驱动机构的三维结构
图 4 炮管擦洗机器人样机及复合驱动机构
样机最大长度约为 0. 6 m,收缩状态最小长 度为 0. 45 m,主 要 材 料 为 合 金 铝,总 重 量 约 为 4. 5 kg。由于体积小、重量轻且操作简单,非常适 合野战或演习环境下对炮管内壁进行擦洗。 2. 2 控制系统设计
1 工作原理
考虑到炮管擦洗机器人要同时实现炮管内壁 擦洗功能和管内前后运动功能,分别通过清洗刷 回转运动和机器人本体的步进伸缩机构实现,其 总体结构如图 1 所示。机器人主要由清洗刷、前 复合驱动机构、后复合驱动机构和伸缩机构组成。 其中,清洗刷安装在前复合驱动机构上,前复合驱 动机构和后复合驱动机构结构类似,均可由一个 步进电机带动凸轮转动 60°顶出圆周均匀分布的 三组橡胶张紧机构,此步进电机也用来驱动清洗 刷来回转动。同时,复合驱动机构外圆周上还有 三组与橡 胶 张 紧 机 构 间 隔 60° 均 布 的 支 撑 轮 机 构,用来支撑机器人的自重并辅助机器人在炮管 内的前后运动。前复合驱动机构和后复合驱动机 构中间装有由步进电机 2 驱动的丝杠螺母机构, 其用来实现前复合驱动机构和后复合驱动机构之 间的相对前后运动。
滚筒式清洗机设计说明书

目录摘要 (1)关键字 (1)引言. (1)1 清洗机的概况及现状分析 (2)1.1概况 (2)1.2现状分析 (2)2 清洗机的结构及工作原理 (3)2.1结构 (3)2.2工作原理 (4)3 设计方案的确定 (4)3.1 原始资料、数据 (4)3.2任务 (4)3.3 设计方案选择 (4)4 运动和动力参数的设计计算 (6)4.1 物料在倾斜滚筒面上的运动及其运动轨迹 (6)4.2滚筒材料及驱动方式的选择 (9)4.3功率的计算及电动机的选择 (10)4.3.1功率的计算 (10)4.3.2 电动机的选择 (12)4.4 传动比及动力参数的计算 (13)4.4.1 传动比的分配 (13)4.4.2 传动装置的运动和动力参数的计算 (13)5 零部件的设计和标准件的选用 (13)5.1 轴的设计计算 (14)5.1.1 初算轴的直径 (14)5.1.2 初选轴的形式 (14)5.1.3轴的结构的设计 (14)5.1.4 轴的强度校核 (15)5.1.5择轴和联轴器的键 (17)5.2 滚筒结构的设计 (19)5.3 联轴器的计算及选择 (20)5.3.1 联轴器的选用 (20)5.3.2轴器的型号和主要尺寸 (20)5.4 滚动轴承及轴承座的选择 (21)5.4.1 类型选择 (21)5.4.2型号选择 (21)5.4.3 轴承的结构和定位方法 (23)5.4.4滚动轴承润滑和密封 (23)5.4.5滚动轴承座的选择及其配置 (23)5.5 减速器的选择 (24)6 电气控制 (24)致谢 (26)参考文献 (26)滚筒式清洗机设计06机电技术教育(3)班:袁计划指导老师:李立和摘要:本设计基于清洗机械的研究现状和发展状况,根据清洗机的类型、结构和工作原理,结合相关设计手册,通过对清洗机工艺参数及动力学参数的选择计算,电动机的选择,联轴器的选择,并专门设计了淤泥清理口,对方便清除水池里来自马铃薯身上的淤泥起到很大作用,以完成完善清洗机的总体设计。
一种礼炮炮管自动清洗的装置
292017年6月下 第12期 总第264期1 引言随着技术的发展,礼炮的应用越来越广泛。
民用礼炮主要使用可燃性气体和助燃气体的混合物在密闭环境下爆炸,瞬间产生巨响。
军械礼炮则类似火炮,采用榴弹、发烟弹等作为发射药。
礼炮炮管如不经常擦拭,则易导致炮管易锈蚀或卷入杂质,出现螺线磨损,严重影响炮弹发射的准确性、可靠性以及炮管的使用寿命,严重时引发炮管涨膛甚至炸膛。
此外,电子礼炮炮管受潮易造成礼炮点火困难,严重时还会造成电脑主板烧坏而使功能失效。
擦拭炮管内膛可以有效防止锈蚀和减小磨损,保证礼炮的使用寿命、安全性、可靠性以及精度。
擦拭剂以前多用机械擦洗,清洁效果不好且易损失炮管。
目前常用的清洗方式有:手工清洗、半自动清洗和全自动清洗。
人工手动擦拭直接采用人力逐段往复推拉刷子进行擦拭。
该方法简单实用,但是费时费力,还可能损失内膛。
半自动擦拭就是由人控制擦拭刷头,操作控制装置进行擦拭,擦拭动力由电动或气动提供。
全自动擦拭指除了准备工作需要由人完成以外,其他的擦拭工作完全由机器完成,从而实现无人化擦拭,这样一个人就能同时擦拭多台礼炮,效率大大提高。
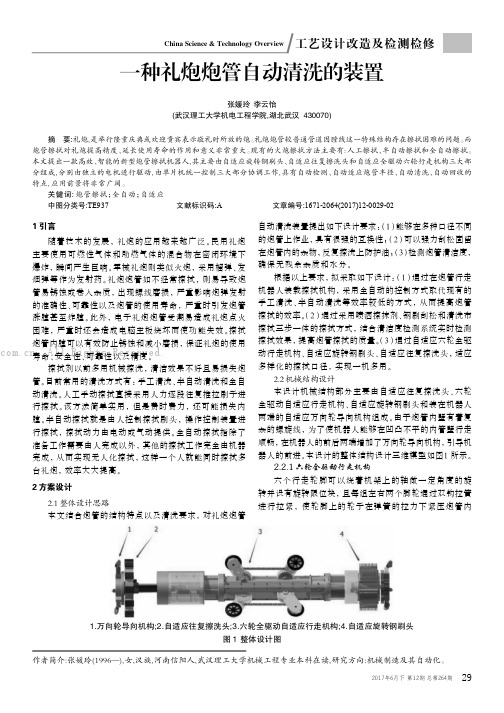
2 方案设计2.1 整体设计思路本文结合炮管的结构特点以及清洗要求,对礼炮炮管自动清洗装置提出如下设计要求:(1)能够在多种口径不同的炮管上作业,具有很强的互换性;(2)可以强力刮松固留在炮管内的杂物,反复擦洗上防护油;(3)检测炮管清洁度,确保无残余杂质和水分。
根据以上要求,拟采取如下设计:(1)通过在炮管行走机器人装载擦拭机构,采用全自动的控制方式取代现有的手工清洗、半自动清洗等效率较低的方式,从而提高炮管擦拭的效率。
(2)通过采用喷洒擦抹剂、钢刷刮松和清洗布擦拭三步一体的擦拭方式,结合清洁度检测系统实时检测擦拭效果,提高炮管擦拭的质量。
(3)通过自适应六轮全驱动行走机构、自适应旋转钢刷头、自适应往复擦洗头,适应多样化的擦拭口径,实现一机多用。
2.2 机械结构设计本设计机械结构部分主要由自适应往复擦洗头、六轮全驱动自适应行走机构、自适应旋转钢刷头和装在机器人两端的自适应万向轮导向机构组成。
鞭炮插引机设计

目录摘要 (1)1 绪论 (3)1.1 简述 (3)1.2 鞭炮插引机的国内现状 (3)1.3 本课题的研究目的和内容 (6)1.4 本课题的研究意义 (6)2 鞭炮插引机机械结构原理及运动分析 (7)2.1 鞭炮插引机送料平台工作原理和工艺动作分解 (7)2.2 鞭炮插引机插引部分机构工作原理以及工艺动作分解 (8)2.3 鞭炮插引机执行机构选型 (9)2.3.1 鞭炮插引机双胶辊的机构方案 (9)2.3.2 鞭炮插引机压引板的机构方案 (9)2.3.3 鞭炮插引机切引刀的机构方案 (10)2.4 鞭炮插引机切引刀凸轮机构的尺寸设计 (10)2.5 鞭炮插引机机械结构受力分析与计算 (13)2.5.1 鞭炮插引机轴用键受力计算 (13)2.5.2 鞭炮插引机齿轮受力计算及校核 (15)2.5.3 鞭炮插引机切引刀转动拉伸弹簧设计计算 (16)2.5.4 鞭炮插引机主轴的设计计算及其校核 (17)3 步进电机的选择 (19)3.1步进电机 (19)3.2 PLC驱动步进电机 (19)4 传感器的选择 (21)4.1 电磁(感)式传感器 (22)4.2 光电式传感器 (22)4.3 霍尔元件传感器 (23)4.4 超声波位置传感器 (23)5 控制程序的设计 (25)5.1 I/O接线图 (25)5.2 梯形图 (26)6 结论 (27)参考文献 (28)致谢 (29)附录I:英文译文 (30)鞭炮插引机设计摘要:目前鞭炮插入引线设备主要通过手动方式,工人劳动强度大,生产效率低。
为了提高生产效率,在分析插入引线过程与要求的基本上,研发了自动插引机。
该设备通过手摇控制机构,实现了炮盘进给、引线插入的自动完成,该设备高效、安全,生产效率高。
根据引线插入机构的工作过程,建起了结构关系式,在不同的设计要求(引线的长度与鞭炮的大小)下,实现了插引机的参数化设计。
鞭炮是我国的传统产品,历来由手工制作。
虽然最近几年鞭炮生产的少部分工序采用了一些机械设备,但许多工序仍沿用传统的手工操作方法,其生产率低,工时多,劳动强度大,安全隐患多,自动化程度低。
鞭炮洗筒机课程设计
鞭炮洗筒机课程设计一、课程目标知识目标:1. 学生能够理解鞭炮洗筒机的基本结构及其工作原理;2. 学生能够掌握鞭炮洗筒机操作流程中的安全知识与规范;3. 学生了解鞭炮洗筒机在鞭炮生产中的应用及其在整个生产过程中的重要性。
技能目标:1. 学生能够运用所学知识,正确操作鞭炮洗筒机;2. 学生能够通过小组合作,完成鞭炮洗筒机的模拟操作;3. 学生能够运用批判性思维,分析鞭炮洗筒机的优缺点,并提出改进意见。
情感态度价值观目标:1. 培养学生对鞭炮生产过程中机械设备的兴趣,激发他们的探究欲望;2. 培养学生的安全意识,让他们在操作鞭炮洗筒机时能够严格遵守安全规定;3. 培养学生团结协作的精神,使他们能够在小组合作中共同解决问题。
本课程针对初中年级学生,结合鞭炮生产实际,以鞭炮洗筒机为教学载体,让学生在学习过程中掌握相关知识和技能。
课程注重实用性,将理论与实践相结合,培养学生的实际操作能力。
同时,关注学生的情感态度价值观培养,提高他们的安全意识和团队协作能力。
通过本课程的学习,为学生今后在鞭炮生产及相关领域的发展奠定基础。
二、教学内容1. 鞭炮洗筒机的基本结构:- 引导学生认识鞭炮洗筒机的各个部件,如进料斗、洗筒筒体、出料斗、电机等;- 分析各部件在鞭炮洗筒机中的作用和功能。
2. 鞭炮洗筒机的工作原理:- 介绍鞭炮洗筒机的工作流程,包括进料、清洗、出料等环节;- 解释鞭炮洗筒机的工作原理,如利用摩擦力、离心力等物理原理进行清洗。
3. 鞭炮洗筒机的操作流程与安全规范:- 指导学生掌握鞭炮洗筒机的操作步骤,包括开机、运行、关机等;- 强调操作鞭炮洗筒机时应注意的安全事项,如佩戴防护装备、避免直接接触运行部件等。
4. 鞭炮洗筒机的应用与优缺点分析:- 讲解鞭炮洗筒机在鞭炮生产中的应用,提高学生对设备在生产过程中重要性的认识;- 分析鞭炮洗筒机的优缺点,引导学生思考如何改进设备,提高生产效率。
教学内容依据课程目标,紧密结合教材,按照以下进度安排:第一课时:鞭炮洗筒机的基本结构及各部件功能;第二课时:鞭炮洗筒机的工作原理;第三课时:鞭炮洗筒机的操作流程与安全规范;第四课时:鞭炮洗筒机的应用与优缺点分析。
清洗机原理及设备结构介绍
最终喷淋(CLE7)
最终喷淋介绍:
(1)液刀的作用是把玻璃表面上多余的水切出,液刀在喷淋的末端。
(2)喷淋装置上面6排喷嘴,下面有5排喷嘴。 (3)10#水箱供水,供水管道安装有0.2μm过滤器,水箱安装有加热装置, 有温度传感器,装有4个光电液位传感器。 (4)清洗是18MΩ超纯水,温度要求40-45℃。 (5)用过的超纯水经过滤后供二流体2使用。
浓度测量仪 高液位传感器
低液位传感器
取样管
加热管
温度传 感器
超声波清洗(CLE4)
超声波介绍:
(1)有7个振板,每个振板共有16个振子,每个振子功率50W。
(2)超声波发生的频率为40-90KHZ。频率、功率可调。 (3)水箱有两个一用一备(4#、5#水箱)。
(4)水箱有加热装置、浓度、温度传感器。
输入 传送带(CLE1)
(1)传送带设有定位装置,两侧各1个汽缸定位玻璃。
(2)滚轮的材质是尼龙,挡边轮材质是UPE。 (3)设有2组滚刷,上下各2排,滚刷转动方向与玻璃前进方向相反。 (4)传送带出口处设有1组海绵滚筒,抹干玻璃上的水份。
(5)喷淋用的是6#水箱的水,水经10μm过滤器进行过滤。
清洗能动性能指标
用水要求:①18MΩ(电导率)超纯水; ②TOC(有机碳总和):100PPb (十亿分之一); ③SiO2:50PPb。 CDA:①温度:25+5℃, ②露点:-50℃不凝水, ③Particle:0.3um,30ea/cm2。
谢谢观赏!
滚刷清洗(CLE6)
滚刷段介绍:
一共设有3组滚刷, 上下有各7排喷淋嘴。
滚刷上、下间距可调。 设有一个水箱,供水管安装有 0.45μm过滤器,装有4个光电液位传感器。
滚筒式清洗机的设计

滚筒式清洗机的设计任务书1.课题意义及目标学生应通过本次毕业设计,综合运用所学过的基础理论知识,深入了解滚筒式清洗机的工作原理和设计等方面的方法及设计思想等内容,为学生在毕业后从事工作打好基础。
2.主要内容(1)滚筒式清洗机总体结构方案和传动系统设计。
(2)进行结构分析和设计计算(3)绘制装配图和零件图3.主要参考资料[1] 孙桓,陈作模.机械原理[M].北京:高等教育出版社.1996.[2] 吴宗泽. 机械设计实用手册[S].化学工业出版社.2003.[3] 陈旭俊.工业清洗机及清洗技术[M].化学工业出版社.2005.4.进度安排审核人:年月日滚筒式清洗机的设计摘要:本次设计是就当前的国内外清洗机的发展现状及其未来的发展趋势的前提下,结合自身在大学期间所学的关于机械方面的知识,并查阅相关的资料,首先通过确定清洗机所需要满足的生产条件和生产时的功率、效率等要求,确定出清洗机的主体部分滚筒的大小尺寸及材料的的选择,通过设计加肋条满足筒体的刚度和强度要求,然后通过比较论证几种常见的减速器装置,确定出适合本次设计的最佳选择。
其次,通过计算筒体所需满足的转矩要求,初算出轴的直径,然后确定出本次设计合适的联轴器的型号,然后查阅资料确定出本次设计所需要的滚动轴承的型号,然后设计轴为阶梯轴,通过与其他元件的连接,确定出阶梯轴的尺寸大小。
然后通过整体的分析确定整个清洗机的结构,通过与实际的工作情况相结合,最终确定方案。
关键词:滚筒式清洗机滚筒清洗机减速器联轴器轴The design of the drum washing machineAbstract:The advantages of this design is the current domestic and foreign development present situation and future trend of the development of the premise, combined with their own learned in college of mechanical knowledge, and access to relevant data, first through the determination of cleaning machines needed to meet the production conditions and productionof power, efficiency requirements, such as the size of the main body of the washing machine drum and the selection of materials, through the design with rib, satisfy the requirement of the cylinder stiffness and strength, and then through comparison of several common reducer device, the best choice to determine the suitable for the design. Secondly, through the calculation of torque of cylinder needed to meet the requirements, work out at the beginningof shaft diameter, and then identify the appropriate coupling model design.Keywords: drum washing machine,drum,cleaning machine,reduce,coupling,shaft.目录1 引言...................................................................... I I 1.1现状. (2)1.2发展趋势 (2)2 滚筒式清洗机的主要结构和工作原理 (4)2.1结构 (4)2.2工作原理 (4)3 清洗机传动方式的确定 (5)3.1 清洗机工作需满足的条件 (5)3.2 设计方案选择 (5)4 马铃薯在滚筒内的运动轨迹及滚筒的倾斜角度计算 (9)4.1 马铃薯在清洗机内的运动轨迹 (9)4.2 滚筒筒体材料及滚筒转动方式的确定 (12)4.2.1 滚筒筒体材料的确定 (12)4.2.2滚筒筒体最小壁厚计算 (12)4.2.3 滚筒转轴运动方式的确定 (13)4.3 功率的计算 (13)4.4电动机的选择 (16)4.4.1电动机功率的选择 (16)4.4.2 确定电动机的转速 (16)4.4.3 电动机的型号的确定 (16)4.5传动比和清洗机的工作转速的计算 (16)4.5.1 传动比的分配 (16)4.5.2滚筒式清洗机的工作转速的确定 (17)5 清洗机轴的设计及校核和其他零件的的确定 (18)5.1 轴的设计计算 (18)5.1.1 初算轴的直径 (18)5.1.2 初选轴的形式 (19)5.1.3 轴结构的确定 (19)5.1.4 轴的强度校核 (20)5.1.5 键的选择 (23)5.2 清洗机整体的结构设计方案 (25)5.3 联轴器的类型及型号尺寸 (26)5.3.1 联轴器类型的确定 (26)5.3.2 联轴器型号和尺寸的选择 (26)5.4 确定滚动轴承和轴承座的设计方案 (27)5.4.1 滚动轴承类型确定 (27)5.4.2 滚动轴承型号的确定 (28)5.4.3 滚动轴承的结构及定位设计 (29)参考文献 (31)致谢 (32)总结 (3)31 引言随着我国人民生活水平的提高,人们开始越来越注重对蔬菜水果的清洗质量,所以在我国为适应人们的需要清洗行业快速发展起来。
炮管擦洗机器人总体方案的设计
炮管擦洗机器人总体方案的设计张坤【摘要】炮管擦洗机器人是将管道清洗机器人进行改进的特殊机器人,与常见机器人相比有着很大的不同特点:一是炮管是有着环境表面特殊的一种内部管道;二是由于膛线这一特殊结构的需要,使得炮管擦洗机器人在管内不便于行走;三是多处积炭的阴阳线交界处很难清洁,必须对擦洗模块有特殊要求的设计.因此,在这种结构特殊要求下,新的要求在机器人的控制和运动模式上实现,现在通过分析管道机器人炮管清洗特点、运动方式和机构要求,再结合机器人的擦洗方式及运动方式给炮管的特殊要求,确定清洗方式对炮管环境的内膛更有效、更适应,在此基础上提出炮管擦洗机器人的本体结构设计方案.【期刊名称】《产业与科技论坛》【年(卷),期】2016(015)013【总页数】2页(P66-67)【关键词】炮管擦洗;机器人;总体设计【作者】张坤【作者单位】湖南机电职业技术学院汽车工程学院【正文语种】中文执行炮管的保养和擦洗任务的炮管擦洗机器人,必须满足以下要求:一是结构紧凑,便于携带,使用符合要求;二是需要适应性强, 炮管能进行一定直径范围的操作;三是需要快速的清洁速度,效果好,并能实现快速响应要求;四是需要很强的互换性,主要部分易于拆卸和互换,可以使用模块设计;五是延展性强,能够携带测试和维护设备,便于炮管的维护、清洗和检测。
在这种情况下,炮管擦洗机器人给出如下技术要求:一是炮管的可适应性口径范围是:中35mm至小80mm;二是微观变径能满足管径口±5%;三是移动功能模块的拖动力不小于400N;四是行走速度为0~7m/min;五是轴向往复式擦洗摩擦力大于或等于10N;六是总重量不大于2kg。
按照各部件功能的不同,炮管擦洗机器人大致可分为三个部分功能模块: 控制部分功能模块、擦洗部分功能模块与移动部分功能模块。
炮管擦洗机器人的核心设计部分是:擦洗部分功能模块与移动部分功能模块。
负责实施清洁、打油和其他操作的部分是擦洗的功能模块;负责接收其传感器发出的信号的部分是控制的功能模块,实现控制的部分主要是驱动电机;牵动炮管擦洗机器人整体向后或向前移动的部分是移动功能模块。
炮管清洁设备的生产技术

本技术公开了一种炮管清洁装置,包括:清洁部件(5)、主驱动装置、二级驱动装置(8)、电机(15)、传动部件、内窥摄像头、监控用电脑和数据线,其中,所述清洁部件(5)的四周设置有毛刷,且设置两套,一二级蜗杆(7)分为左二级蜗杆和右二级蜗杆,且所述清洁部件的毛刷一套采用合金针,另一套采用65Mn钢丝,并通过键连接与二级蜗杆连接,二级蜗杆带动清洁部件转动清洁炮筒。
权利要求书1.一种炮管清洁装置,其特征在于,包括:清洁部件(5)、主驱动装置、二级驱动装置(8)、电机(15)、传动部件、内窥摄像头、监控用电脑和数据线,其中,所述清洁部件(5)的四周设置有毛刷,且设置两套,一二级蜗杆(7)分为左二级蜗杆和右二级蜗杆,且所述清洁部件的毛刷一套采用合金针,另一套采用65Mn钢丝,并通过键连接与二级蜗杆连接,二级蜗杆带动清洁部件转动清洁炮筒;所述二级驱动装置(8)由14部分组成:二级驱动支架、M6×16螺钉、平键A5×15、驱动轮、轴瓦、螺母轴承座、钢珠Sφ3、蜗轮、封盖、轴用弹性挡圈(25)、平键A8×16、涡轮轴、套、碟簧C31.5-1,通过副浮动架(10)、主浮动架(16)和导向架(19)将二级驱动支架与电机连接在一起并固定,其通过蜗杆带动蜗轮转动,蜗轮带动涡轮轴转动,涡轮轴通过平键带动驱动轮转动。
2.根据权利要求1所述的炮管清洁装置,其特征在于,还设置有锁母支座(1),其位于尾部,其通过螺纹连接将锁母支座固定在连接轴上,并防止轴承(2)、二级蜗杆(7)从连接轴上脱落。
3.根据权利要求1或2所述的炮管清洁装置,其特征在于,还设置有挡套(3),其通过螺钉将挡套固定安装于右二级蜗杆的右端口处用于控制清洁部件(5)位置防止清洁部件左右摇摆。
4.根据权利要求1或2所述的炮管清洁装置,其特征在于,所述二级蜗杆由三部分组成的,两端分别是两键和六键的花键轴分别连接清洁部件和电机,中间是模数m=2、齿数z=1、节圆直径22.4、齿形角20°、导程P=6.283、导程角5°6′8″的蜗杆。
Q3113B型抛丸清理滚筒
Q3113B型抛丸清理滚筒产品使用说明书潍坊宏盛铸造机械有限公司目录一.机器的用途图一、机器的结构图二.主要技术规格三.机器的结构图二、抛丸器结构图四.机器的传动系统图三、传动系统图五.传动由承明细表六.电气设备图四、电气原理图外部接线图七.电气设备明细表八.机器的安装:图六、地基图九.机器的润滑:图七、润滑图十.机器的试车与操作十一.维护保养与使用安全十二.随机备件目录十三.附件目录十四.随机附图-1-一、机器的用途本机用于铸造、锻压车间清理30kg以下的铸锻件表面残余型砂或氧化皮等,它是利用高速回转的叶轮将弹丸抛向滚筒内不断翻转的铸件或锻件上而达到清理之目的。
由于本机带有单独的集尘装置,故安放地点不受车间通风管路的限制,而卫生条件好。
二、主要技术规格1.滚筒直径:1300毫米2.滚筒内长:1200毫米3.滚筒转数: 2.5转/分4.滚筒有效容积:0.33立方米5.最大装载量:600公斤6.工件最大长度:1100毫米7.工件最大重量:30公斤8.清理面要用时间:铸铁件:10-15分钟铸钢件:15-20分钟锻件:10-15分钟9.生产率:2000-3000公斤/小时10.抛丸器:叶轮直径:500毫米-2-叶轮转数:2350转/分弹丸的抛射速度:70-80米/秒弹丸有效扩散角:60°叶轮最大抛丸能力:~200公斤/分11.弹丸直径: 1.2-2.5毫米12.弹丸循环量: 200公斤13.集尘器吸风量: 2000立方米/时14.电动机:1)滚筒 YTC5618 1.5千瓦 31转/分2)抛丸器 Y160M-4 11千瓦 1460转/分3)集尘器Y90S-2B5 1.5千瓦2860转/分15.提升斗:1)数量:28个2)容量:0.7升16.机器外形尺寸:L×B×h 2550×2341×2250毫米17.机器重量:6000公斤三、机器的结构本机主要由传动系统、滚筒、门、构架、集尘器、电气设备、抛丸器等组成。