MATLAB_simulink中的基本模块的参数、含义、应用
MATLABsimulink模块简介
MATLABsimulink模块简介SIMULINK的模块库介绍SIMILINK模块库按功能进行分为以下8类子库:Continuous(连续模块)Discrete(离散模块)Function&Tables(函数和平台模块)Math(数学模块)Nonlinear(非线性模块)Signals&Systems(信号和系统模块)Sinks(接收器模块)Sources(输入源模块)连续模块(Continuous)continuous.mdlIntegrator:输入信号积分Derivative:输入信号微分State-Space:线性状态空间系统模型Transfer-Fcn:线性传递函数模型Zero-Pole:以零极点表示的传递函数模型Memory:存储上一时刻的状态值Transport Delay:输入信号延时一个固定时间再输出Variable Transport Delay:输入信号延时一个可变时间再输出离散模块(Discrete)discrete.mdlDiscrete-time Integrator:离散时间积分器Discrete Filter:IIR与FIR滤波器Discrete State-Space:离散状态空间系统模型Discrete Transfer-Fcn:离散传递函数模型Discrete Zero-Pole:以零极点表示的离散传递函数模型First-Order Hold:一阶采样和保持器Zero-Order Hold:零阶采样和保持器Unit Delay:一个采样周期的延时函数和平台模块(Function&Tables) function.mdlFcn:用自定义的函数(表达式)进行运算MATLAB Fcn:利用matlab的现有函数进行运算S-Function:调用自编的S函数的程序进行运算Look-Up Table:建立输入信号的查询表(线性峰值匹配)Look-Up Table(2-D):建立两个输入信号的查询表(线性峰值匹配)数学模块(Math )math.mdlSum:加减运算Product:乘运算Dot Product:点乘运算Gain:比例运算Math Function:包括指数函数、对数函数、求平方、开根号等常用数学函数Trigonometric Function:三角函数,包括正弦、余弦、正切等MinMax:最值运算Abs:取绝对值Sign:符号函数Logical Operator:逻辑运算Relational Operator:关系运算Complex to Magnitude-Angle:由复数输入转为幅值和相角输出Magnitude-Angle to Complex:由幅值和相角输入合成复数输出Complex to Real-Imag:由复数输入转为实部和虚部输出Real-Imag to Complex:由实部和虚部输入合成复数输出非线性模块(Nonlinear )nonlinear.mdlSaturation:饱和输出,让输出超过某一值时能够饱和。
matlab实验六、SIMULINK基本用法
SubSystem:建立新的封装(Mask)功能模块
5、Sinks(接收器模块) sinks.mdl
Scope:示波器。 XY Graph:显示二维图形。 To Workspace:将输出写入MATLAB的工作空间。 To File(.mat):将输出写入数据文件。
6、Sources(输入源模块) sources.mdl
Derivative:输入信号微分
State-Space:线性状态空间系统模型 Transfer-Fcn:线性传递函数模型 Zero-Pole:以零极点表示的传递函数模型 Memory:存储上一时刻的状态值 Transport Delay:输入信号延时一个固定时间再输出 Variable Transport Delay:输入信号延时一个可变时间再输出
例exp5_2.mdl
exp5_3.mdl
第四节 SIMULINK自定义功能模块
自定义功能模块有两种方法,一种方法是采用Signal&Systems 模块库 中的Subsystem功能模块,利用其编辑区设计组合新的功能模块;另一 种方法是将现有的多个功能模块组合起来,形成新的功能模块。对于 很大的SIMULINK模型,通过自定义功能模块可以简化图形,减少功 能模块的个数,有利于模型的分层构建。 一、方法1 exp5_5.mdl
SIMULINK的基本知识
一、SIMULINK的启动
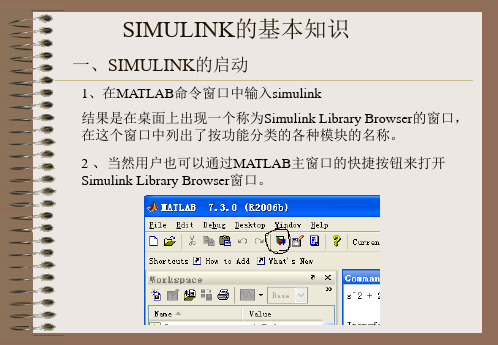
1、在MATLAB命令窗口中输入simulink 结果是在桌面上出现一个称为Simulink Library Browser的窗口, 在这个窗口中列出了按功能分类的各种模块的名称。 2 、当然用户也可以通过MATLAB主窗口的快捷按钮来打开 Simulink Library Browser窗口。
MATLAB SIMULINK模块介绍

Simulink 模块库——Source
Ramp(斜坡)
模块功能 产生连续增大或减小的信号 模块说明 Ramp 模块生成一从指定时间和大 小开始,以一定的速率增大或减小 的信号。 模块数据类型 输出双精度类型信号 模块参数对话框 Slope:斜率,产生信号的变化率 Start time:信号开始产生的时间 Initial output:信号初始值
Simulink 模块库——Source
From Workspace(从工作空间读数 据)
模块功能 从文件读数据 模块说明 From Workspace模块从Matlab工作空间读取数 据。模块的Data参数指定工作空间的数据,由包 含信号值和时间步表的矩阵或结构的Matlab计算 表达式来指定。其矩阵或结构的格式与工作空间 中输入的数据是 一致的。模块的图标显示了Data 参数的表达式。 模块数据类型 任何类型实数或复数信号 模块参数对话框 Data:包含仿真时间和相应信号的数值表。如 果所需的信号-时间矩阵或结构已经存在于工作空 间中,则只需要输入矩阵名称。 Sample time:从工作空间读取数据的采样率 Form output after final data value by:在数据 超过Data的末尾时所输出的值。
Simulink 模块库——Source
模块
In1 Constant Signal Generator Ramp Sine Wave Step Repeating Sequence Pulse Generator Chirp Signal Ground Clock Digital Clock From File
Simulink 模块库——Source
Digital Clock(时钟)
MATLAB simulink中地基本模块地全参数、含义、的应用
精彩文档电力线路模块PI Section Line单项π型线路单相传输线模块。
电阻,电感和电容的传输线,沿着线是均匀分布的。
级联几个相同的PI部分是通过以下方式获得一个近似的分布参数线路模型的Three-Phase PI Section Line三相电力线路模块实现了一个平衡的三相传输线模型参数集中在π部分。
相反,沿着线的电阻,电感和电容是均匀分布的分布参数线路模型,三相PI剖面线块肿块行参数在一个单一的π部分所示,在图中只有一相下代表。
被指定为正序和零序的,要考虑到的参数之间的感性和容性耦合的三相导体,以及地面参数的参数R,L,和C线。
在此方法的指定行参数假设,这三个阶段是平衡的。
使用一个单一的PI部分的模型是适当的传输线或短,在感兴趣的频率范围是有限的基频周围建模。
你可以得到更准确的模型通过级联多个相同的块。
见PI剖面线的最大频率范围的说明,通过PI线模型,可以实现。
频率用于R L C规范指定行参数所用的频率,以赫兹(Hz)。
这通常是标称系统频率(50赫兹或60赫兹)。
正序和零序电阻正序和零序电阻欧姆/公里(Ω/公里)。
正序和零序电感正序和零序电感:亨利/公里(H/公里)。
正序和零序电容正序和零序电容法拉/公里(F /公里)。
线路段长度(KM)该生产线部分长度在千米(公里)。
Three-Phase Transformer (Two Windings)三相变压器(两个绕组)使用三个单相变压器,三相变压器三相变压器两个绕组块实现了。
您可以模拟饱和的核心不是简单地通过在参数菜单中设置相应的复选框块。
线性变压器块和可饱和变压器块部分的单相变压器的电气模型的详细说明,请参阅。
可以以下列方式连接的两个绕组的变压器:1)Y2)Y与中性点3)接地Y4)三角洲三角洲(D1),30度的滞后Y通过5)D11)三角洲,三角洲领先的Y通过30度Three-Phase V-I Measurement三相电压-电流测量电压测量选择没有,如果你不想要测量三相电压。
simulink各模块中文详解

simulink各模块中文详解Simulink是一种基于模块化建模方式的仿真软件,它可以用来进行系统级的设计、建模和仿真。
Simulink提供了丰富的模块库,包括信号处理、控制系统、通信系统等各个领域的模块,这些模块可以通过连接线连接起来,构成一个完整的系统模型。
在Simulink中,每个模块都有特定的功能和参数设置,下面我们将对Simulink的一些常用模块进行中文详解。
一、信号源模块信号源模块是Simulink中最基础的模块之一,它用于生成各种不同类型的信号。
常见的信号源模块包括正弦波信号源、方波信号源、脉冲信号源等。
这些信号源模块可以设置信号的幅值、频率、起始时间等参数,用于模拟各种不同的输入信号。
二、数学运算模块数学运算模块用于进行各种数学运算,比如加法、减法、乘法、除法等。
Simulink提供了各种数学运算模块,包括加法器、乘法器、除法器等。
这些模块可以对输入信号进行各种数学运算,生成输出信号。
三、滤波器模块滤波器模块用于对信号进行滤波处理,常见的滤波器模块包括低通滤波器、高通滤波器、带通滤波器等。
这些模块可以通过设置滤波器的截止频率、阶数等参数,对输入信号进行滤波,去除不需要的频率成分,得到所需的输出信号。
四、控制系统模块控制系统模块用于建立和仿真各种控制系统,包括PID控制器、状态空间模型、传递函数模型等。
这些模块可以通过设置控制器的参数,对输入信号进行控制,使系统输出达到期望值。
五、状态空间模块状态空间模块用于建立和仿真线性时不变系统的状态空间模型。
状态空间模型描述了系统的状态变量和输入输出关系,可以通过状态空间模块进行系统的分析和控制。
六、通信系统模块通信系统模块用于建立和仿真各种通信系统,包括调制解调器、信道模型、误码率计算器等。
这些模块可以模拟通信系统的发送、传输和接收过程,对信号进行调制解调、传输信道建模等操作。
七、数据存储模块数据存储模块用于存储和读取仿真过程中的数据,包括存储器、查找表、文件读写模块等。
Matlab-Simulink各模块对应的中文名称及介绍
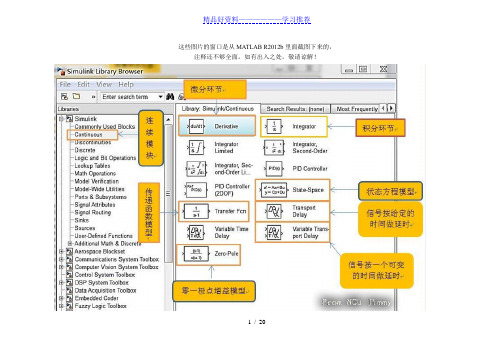
精品好资料——————学习推荐这些图片的窗口是从MA TLAB R2012b里面截图下来的,注释还不够全面。
如有出入之处,敬请谅解!1/ 20Derivative :微分模块,输出为输入信号的微分。
无需设置参数Integrator:积分模块,输出时输入信号的积分,可设定初始条件(比如混沌系统的仿真),通常情况下初始条件不用考虑Memory:输出来自前一个时间步的模块输入State-Space:状态空间模块,主要应用应用于现代控制理论中多输入多输出系统的仿真,双击模块可设置的主要参数有:系数矩阵A,B,C,D以及初始条件Transfer Fcn:传递函数多项式模型,实现现行传递系统,双击可设置分子多项式和坟墓多项式的系数Transport Delay:时间延迟模块,通过模块内部参数设定延迟时间Variable Transport Delay:将输入延迟一可变的时间Zero-Pole:传递函数零、极点模型,实现一个用零极点标明的传递函数,双击设置零点、极点、增益2/ 20Backlash:磁滞回环特性模块Coulomb & Viscous Friction:库伦摩擦与黏性摩擦特性模块Dead Zone:死区特性模块Hit Crossing:检测输入信号的零交叉点模块Quantizer:阶梯状量化处理模块Rate Limiter:变化速率限幅模块Relay:带有滞环的继电特性模块Saturation:限幅的饱和特性模块3/ 204/ 20Discrete Transfer Fcn:离散系统传递函数多项式模型,可设置分子分母多项式Discrete Zero-Pole:离散系统传递函数零极点模型,可设置零点、极点、增益,可以设置采样时间Discrete Filter:离散系统滤波器,可设置分子分母系数(按照z-1作升幂排列),可设置采样时间Discrete State-Space:离散系统状态空间表达式模块,可设置参数矩阵A,B,C,D,可设置采样时间、初始条件Discrete-Time Integrator:离散系统积分器模块,可设置采样时间、初始条件Unit Delay:离散系统单位延迟模块,可设置采样时间,初始条件Fist-Order Hol:一阶采样保持器Memory:存储模块Zero-Order Hold:零阶采样保持器Discrete Filter:实现IIR和FIR滤波器Discrete State-Space:实现一个离散状态空间系统Discrete-Time Integrator:离散时间积分器Discrete Transfer Fcn :实现一个离散传递函数Discrete Zero-Pol:实现一个用零极点来说明的离散传递函数First-Order Hold:实现一个一阶保持采样-保持系统Unit Delay:将信号延时一个单位采样时间Zero-Order Hold:实现具有一个采样周期的零阶保持5/ 206/ 20Direct Look-Up Table(n-D):直接查询n维表模块Interpolation(n-D)Using Prelook-up:适用预查询的n维内查表模块Look-Up Table:一维查表模块Look-Up Table(2-D):二维查表模块Look-Up Table(n-D):n维查表模块Prelook-Up Index Search:预查询索引搜寻模块7/ 208/ 20Abs:绝对值或复数求模模块,输出是输入信号的绝对值(或复数的模)Algebraic Constraint:代数约束模块,将输入信号约束为零,计算输入信号为零时的状态值Assignment:分配器模块Bitwise Logical Operator:位逻辑运算模块,可选择逻辑运算关系(与-AND,或-OR,非-NOT,异或-XOR等),可设置第二运算数(默认值为FFFF)Combinatorial Logic:实现一个真值表,组合逻辑运算模块Complex to Magnitude-Angle:复数模、角运算模块,输入量为复数,输出量有两个,一个输出为输入信号的模,另一个为输入信号的角Complex to Real-Imag:复数实部、虚部运算模块,输入量为复数,输出量有两个,一个输出为输入信号的实部,另一个为输入信号的虚部Derivative:输出输入信号的时间微分Dot Product:两输入信号进行点积(内积)运算,无需设置参数Gain:增益模块,将模块的输入信号乘上一个增益Logical Operator:多输入单输出逻辑运算模块,可选择逻辑运算关系(与-AND,或-OR,非-NOT,异或-XOR等)、设置输入信号的个数Magnitude-Angle to Complex:模角生成复数模块,默认输入量有两个:一模一角。
simulink 模块参数
simulink 模块参数【1.Simulink简介】Simulink是MATLAB的一个重要工具箱,用于模拟和分析动态系统。
它为用户提供了一个基于图形的建模环境,使得用户可以方便地创建、编辑和仿真控制系统、信号处理系统等。
在Simulink中,有许多预先定义好的模块,用户可以根据需要进行组合和连接,以构建所需的系统模型。
【2.Simulink模块分类与功能】Simulink模块主要分为以下几类:1.源模块:产生输入信号,如信号发生器、文件读取器等。
2.线性模块:执行线性变换,如滤波器、放大器等。
3.非线性模块:执行非线性变换,如信号处理、逻辑运算等。
4.输出模块:将仿真结果输出,如示波器、数据记录器等。
5.连接模块:用于连接不同模块,如总线、开关等。
【3.设置模块参数的方法】在Simulink中,设置模块参数主要有以下几种方法:1.直接双击模块,弹出参数对话框进行设置。
2.在Simulink编辑器中,选中模块,点击右键选择“模块参数”进行设置。
3.使用MATLAB命令设置,如`set_param(<模块名称>,"<参数名称>",<参数值>)`。
【4.常用模块参数详解】1.信号发生器模块:如正弦信号发生器,可以设置信号频率、幅度、相位等参数。
2.滤波器模块:如低通滤波器,可以设置截止频率、通带衰减、阻带衰减等参数。
3.放大器模块:如线性放大器,可以设置输入和输出范围、增益等参数。
4.逻辑运算模块:如与门、或门等,可以设置逻辑关系、输入信号等参数。
【5.参数设置实例演示】以一个简单的滤波器为例,假设我们需要设计一个截止频率为1kHz的低通滤波器。
首先,在Simulink库中找到滤波器模块,将其放入编辑器中。
然后,双击滤波器模块,在参数对话框中设置截止频率为1kHz,通带衰减为1dB,阻带衰减为20dB。
最后,将滤波器与其他模块连接,完成滤波器系统的搭建。
matlab simulink结构
MATLAB Simulink 是一个可视化建模和仿真工具,它通过图形化的方式来描述系统的行为。
在 Simulink 中,系统被划分为多个部分,每个部分都对应着一种不同的元素或结构。
下面是一些常见的 Simulink 结构:1. 模型(Model):Simulink 中最基本的结构,表示整个系统的总体框架。
模型中包含了所有的系统部件,在模型内部可以连接这些部件,以形成完整的系统。
2. 子系统(Subsystem):子系统是模型中的一个独立部分,通常用于组织和管理系统的复杂度。
它可以与其他子系统或部件相互连接,并可以将其输出提供给上层系统或其他子系统使用。
3. 模块(Block):模块是 Simulink 中的基本部件,它们代表了系统中的基本功能单元。
它们可以执行各种操作,如加、减、乘、除、积分、微分等。
4. 信号(Signal):信号是 Simulink 中的数据流,代表了各个模块之间传递的数据。
在Simulink 中,信号可以通过端口进行输入和输出。
5. 端口(Port):端口用于在模块之间传递信号,它可以是输入端口、输出端口或双向端口。
每个模块可以拥有多个端口。
6. 参数(Parameter):参数是模块的属性,可以用于设置模块的各种参数、常数或变量。
参数可以在模块内部使用,也可以在模块之间传递。
7. 初始状态(Initial State):初始状态是系统的初始状态,它对系统的运行过程产生了重要影响。
在 Simulink 中,初始状态通常由 Initial Block 来设置。
8. 仿真器(Simulator):仿真器是 Simulink 的核心组件,用于执行系统仿真。
仿真器提供了多种仿真方法,如常规仿真、加速仿真、硬件仿真等。
以上这些结构只是 Simulink 中的一部分,Simulink 还包括了许多其他的结构和元素,比如 Scope、Display、To Workspace 等。
这些结构和元素共同构成了 Simulink 强大而灵活的建模和仿真环境。
MATLAB软件SIMULINK模块

C.1 信号分析基础-23/24
Kunming University of Science & Technology
exp4_1.mdl
C.1 信号分析基础-24/24
Kunming University of Science & Technology
exp4_1.mdl
plot(t,out)
C.1 信号分析基础-25/24
输入输入输出模块库输出模块库22个信宿模块组信宿模块组信源模块组信源模块组模型扩充模块组模型扩充模块组模型校核模块组模型校核模块组kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础11112424simulink模型窗口的组成新建模型窗口kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础12122424simulink模型窗口的组成工具栏状态栏表示模型已准备就绪在等待仿真命令表示编辑窗口模型的显示比例表示当前仿真所选择的仿真算法实时显示仿真经历时刻kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础13132424第二节simulink模块库模块功能介绍常用模块组常用模块组输入端口模块输出端口模块常数模块接地模块分路器模块增益模块积分模块混路器模块叉乘模块示波器模块求和模块饱和模块子系统模块单位延迟模块kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础14142424第二节simulink模块库模块功能介绍连续模块组积分模块微分模块状态空间模块传递函数模块时间延迟模块可变时间延迟模块变量延迟模块零极点增益模块kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础15152424第二节simulink模块库模块功能介绍非连续模块组库仑与粘性摩擦模块磁滞回环模块死区模块饱和模块动态死区模块量化模块滞环继电模块kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础16162424第二节simulink模块库模块功能介绍离散模块组离散模块组离散状态空间模块离散滤波器模块离散传递函数模块一阶保持器模块离散零极点增益模块离散时间积分模块单位延迟模块零阶保持器模块kunminguniversitytechnologykunminguniversitytechnologyc1c1信号分析基础信号分析基础171
MATLAB SIMULINK模块介绍
Simulink 模块库——Source
Step(阶跃)
模块功能 产生一个阶跃信号 模块说明 Step 提供在指定时间处在两个可定义的水平 间的阶跃。 模块数据类型 双精度类型实数信号 模块参数对话框 Step time:发生阶越变化的时间(s) Initial value:从开始仿真达到Step time时的 模块输出值 Final value:仿真超过Step time后的输出值 Sample time:阶越采样率 当仿真时间小于Step time,则输出Initial value;当仿真时间大于或等于Step time输出 Final value.
从工作空间的矩阵中读取数据
生成正态分布的随机信号 生成均匀分布的随机数 给连续系统引入白噪声
Simulink 模块库——Source
Inport(输入端口)
模块功能 为子系统或外部输入创建输入端口。 模块说明 该模块将输入信号从一个系统的外部引入到 系统的内部。Simulink按照规则来指定Inport 端口的编号。 模块数据类型 该模块接受任何类型的实数或复数值信号。 模块参数对话框 Port number:端口数; Port dimensions:端口维数; Sample time:采样时间; Data type:数据类型; Signal type:信号类型; Interpolate data:插值数据;选择插值或
(1)Sources模块库,为仿真提供各种信号源; (2)Sinks模块库,为仿真提供输出设备元件; (3)Continuous模块库,为仿真提供连续系统; (4)Discrete模块库,为仿真提供离散元件; (5)Math模块库,提供数学运算功能元件; (6)Function&Tables模块库,自定义函数和线形插值查表模块库; (7)Nonlinear模块库,非连续系统元件; (8)Signals&System 模块库,提供用于输入、输出和控制的相关信号及相 关处理; (9)Subsystems模块库,各种子系统;
Simulink常用库模块介绍Matlaba

Simulink常用库模块介绍MatlabaSimulink是一种图形化编程环境,用于设计、建模和仿真动态系统。
它是Matlab的一部分,通过可视化编程方法,可以快速搭建模型并进行系统仿真。
Simulink提供了许多常用的库模块,用于模拟不同类型的系统。
以下是一些Simulink常用库模块的介绍:1. Continuous库模块:这个库模块包含了用于建模连续时间系统的模块。
其中最常用的模块包括Gain(增益),Transfer Fcn(传递函数),Integrator(积分器)和Sum(求和器)。
通过这些模块,可以建立线性和非线性的连续时间系统模型。
2. Discrete库模块:这个库模块包含了用于建模离散时间系统的模块。
其中最常用的模块包括Delay(延时器),Discrete Transfer Fcn (离散传递函数),Discrete Filter(离散滤波器)和Unit Delay(单位延时器)。
这些模块用于建立离散时间系统的模型。
3. Sources库模块:这个库模块包含了用于系统输入的模块。
其中最常用的模块包括Constant(常数),Step(阶跃信号),Ramp(斜坡信号)和Sine Wave(正弦波)。
这些模块用于生成系统的输入信号。
4. Sinks库模块:这个库模块包含了用于系统输出的模块。
其中最常用的模块包括Scope(示波器),To Workspace(保存数据到工作空间)和Display(显示结果)。
这些模块用于获取系统的输出信号并进行可视化或保存。
5. Math Operations库模块:这个库模块包含了各种数学运算模块。
其中最常用的模块包括Add(加法),Subtract(减法),Multiply(乘法)和Divide(除法)。
这些模块可用于进行各种数学运算,例如加减乘除等。
6. Logic and Bit Operations库模块:这个库模块包含了逻辑和位运算模块。
Simulink常用模块名称及其功能简介

Simulink常用模块名称中英文对照Sources库Band-Limited White Noise 宽带限幅白噪声模块,把一个白噪声引入到连续系统中Chirp Signal 线性调频信号(频率按时间线性变化的正弦波)模块,产生频率增加的正弦信号Clock 时钟信号模块,显示或者提供仿真时间Constant 常量输入模块,产生一个常数值Digital Clock 数字时钟模块,按指定的间隔产生采样时间Digital Pulse Generator 产生具有固定间隔的脉冲From File 从一个文件读取数据From Work space 从在工作空间定义的矩阵读入数据Ground 接地模块,将一个未连接的输入端接地In1 输入端口模块Pulse Generator 脉冲信号发生器模块,产生固定间隔的脉冲Ramp 斜坡信号输入模块,产生一个以常数斜率增加或者减小的信号Random Number 产生正态分布的随机数Repeating Sequence 产生一个可重复的任意信号Signal Generator 产生多种多样的普通信号Signal Builder 自定义信号发生器Sine Wave 产生正弦波信号Step 阶跃信号模块,产生一个单步函数Uniform Random Number 产生均匀分布的随机数Sinks库Display 实时数字显示模块,显示其输入信号的值Floating Scope 浮动示波器模块Out1 输出端口模块Scope 示波器模块,显示在仿真过程产生的信号的波形Stop Simulation 仿真终止模块,当它的输入信号非零时,就结束仿真Terminator 信号终结模块,结束一个未连接的输出端口To File 写数据到文件To Workspace 把数据写进工作空间里定义的矩阵变量XY Graph 用一个MATLAB图形窗口来显示信号的X-Y坐标的图形Continuous库主要用于连续系统的仿真Derivative 微分模块,输出为输入信号的微分。
simulink模块介绍
simulink模块介绍
Simulink是Matlab提供的一个功能强大的建模、仿真和代码生成工具,可用于模拟各种非线性系统。
它通过预先定义的图形化模块来建立系统仿真模型,每个模块代表一种信号处理功能,它们可以组合起来形成一个模型,并在模型上测量系统的动态特性。
1. 输入输出模块:提供了常量输入、示波器、数字量输入/输出模块等,用于将模拟或数字量信号输入和输出模拟系统;
2. 数学运算模块:提供了积分、微分、乘法、除法、求平方根、增补和求值等模块,用于实施数学运算;
3. 控制模块:提供了比较器、PID控制器、状态空间模型等模块,用于实现复杂的控制系统;
4. 编程模块:提供了MATLAB函数、S-Function、MATLAB程序、Stateflow等模块,可以在仿真模型中使用编程语言;
5. 动态模块:提供了直流电动机、永磁同步电动机、离心泵、液压缸、空气动力学等模块,用于仿真物理系统;
6. 逻辑模块:提供了逻辑门、映射器、比较器、时序器等模块,用于实现简单的逻辑控制功能;
7. 信号处理模块:提供了数字滤波器、信号积分、振荡器、数字放大器等模块,用于处理信号。
simulink 常用模块解释

simulink 常用模块解释Simulink是一种常用的软件工具,用于建模、仿真和分析动态系统。
它通常与MATLAB配合使用,提供了一种图形化的方法,使工程师和科学家能够更容易地设计和测试各种控制系统。
下面是几个常用的Simulink模块的解释:1.信号发生器(Block: Signal Generator)信号发生器模块用于生成各种类型的信号,例如正弦波、方波、锯齿波等。
用户可以通过设置频率、振幅、相位等参数来生成所需的信号。
2.积分器(Block: Integrator)积分器模块用于对输入信号进行积分操作。
它可以将一个输入信号的积分值作为输出,对于需要进行累加操作的系统建模非常有用。
3.微分器(Block: Derivative)微分器模块用于对输入信号进行微分操作。
它可以将输入信号的导数作为输出,对于需要对信号变化率进行建模和分析的系统非常有用。
4.增益(Block: Gain)增益模块用于对输入信号进行比例缩放操作。
用户可以通过设置增益参数来放大或缩小输入信号的幅度。
5.触发器(Block: Trigger)触发器模块用于在满足一定条件时触发或延迟系统的某些操作。
例如,当一个信号超过某个阈值时,触发器可以将相应的操作信号输出。
6.多路选择器(Block: Selector)多路选择器模块用于从多个输入信号中选择一个输出信号。
用户可以通过设置选择参数来指定要选择的输入信号。
以上仅是Simulink中的一些常用模块。
这些模块可以根据特定的系统需求被组合在一起,以建立复杂的控制系统、信号处理系统或其他动态系统的模型。
通过使用Simulink,工程师和科学家可以更方便地进行系统设计和分析,并进行仿真来验证其性能。
SIMULINK模块介绍

SIMULINK模块介绍SIMULINK是一款由MathWorks公司开发的仿真软件,它是MATLAB软件的一个附属工具箱。
SIMULINK提供了一个可视化的建模环境,用户可以通过图形化方式搭建模型,并进行仿真和分析。
SIMULINK模块是SIMULINK软件中的一些组件,可以帮助用户进行系统建模、仿真和控制设计。
本文将介绍SIMULINK中的一些常用模块。
1.数学运算与逻辑模块:这些模块包括常见的数学运算符(加减乘除、幂运算、取余等)和逻辑运算符(与、或、非等),可以用于进行数据运算和逻辑判断。
在建模过程中,通过连接这些模块,用户可以实现各种数学运算和逻辑控制,从而实现复杂的系统行为。
2.信号生成器模块:这些模块包括常见的信号发生器(正弦波、方波、脉冲等)和信号生成器(连续或离散的步进信号),可以生成各种基本信号。
用户可以使用这些模块来生成输入信号,用于系统的仿真和测试。
3.数值源与作用器模块:这些模块用于输入和输出数值。
数值源模块可以用于指定模型的初始值,或者作为参数输入到仿真模型中。
作用器模块用于将仿真模型的输出结果传递给其他系统或模型进行实时控制。
4.状态空间模块:这些模块用于描述系统的状态空间方程。
用户可以将系统的状态空间表达式输入到这些模块中,然后连接其他模块进行模型的搭建和仿真。
5.运动控制模块:这些模块用于实现对物体的运动控制。
例如,用户可以使用PID控制器模块对电机进行速度或位置控制,或者使用运动传感器模块来实时监测物体的位置和速度。
6.信号处理模块:这些模块用于对信号进行采样、处理和分析。
用户可以使用滤波器模块对输入信号进行滤波操作,或者使用频谱分析模块对信号的频谱进行分析。
7.光学模块:这些模块用于光学系统的建模和分析。
例如,用户可以使用光学元件模块来描述光学系统中的镜头、透镜等元件,或者使用光传输模块来模拟光束在系统中的传输和传播。
8.通信模块:这些模块用于通信系统的建模和仿真。
MATLAB–Simulink模块说明

Enabled and Triggered Subsystem
使能和触发子系统
Enabled Subsystem
使能子系统
For Iterator Subsystem
重复操作子系统
Function-Call Generator
函数响应生成器
Function-Call Subsystem
函数响应子系统
Detect Change
检测跳变
Detect Decrease
检测递减
Detect Fall Negative
检测负下降沿
Detect FallNonpositive
检测非负下降沿
Detect Increase
检测递增
Detect Rise Nonnegative
检测非负上升沿
Detect Rise Positive
XY Graph
显示二维图形
13.输入源模块Sources
名称
功能说明
Band-Limited White Noise
带限白噪声
Chirp Signal
产生一个频率不断增大的正弦波
Clock
显示和提供仿真时间
Constant
Lookup Table(n-D)
N维输入信号的查询表(线性峰值匹配)
Lookup Table Dynamic
动态查询表
PreLookup Index Search
预查询索引搜索
Sine
正弦函数查询表
6.数学模块Math Operations
名称
功能说明
Abs
取绝对值
Add
加法
Algebraic Constraint
MATLAB_SIMULINK讲解完整版
(4) 将组成子系统的所有模 块都添加到子系统编辑窗口中,
合理排列。 (5) 按要求用信号线连接各
模块。 (6) 修改外接端子标签并重 新定义子系统标签,使子系统更
具可读性。
(1) 打开已经存在的模型。 (2) 选中要组合到子系统中 的所有对象,包括各模块及其连
线。 (3) 选择菜单[Edit>Create Subsystem]命令,模型自动转换
。
(4) 仿真控制类:包括 6 个按键、1 个文本框、1 个列表
框,分别是按键 、按键 、文本框
、列 表框
、按键 、按键 和按键 。
(5) 窗口切换类:包括 6 个按键,分别是按键 、按键
、按键 、按键 、按键 和按键 。
工具栏中各个工具图标及其功能说明见附录 B。
模块是系统模型中最基本的 元素,不同模块代表了不同的功 能。各模块的大小、放置方向、 标签、属性等都是可以设置调整 的。表3-1列出了SIMULINK中模 块基本操作方法的简单描述。
信号线是创建模型的基础。 SIMULINK中的信号线并不是简 单的连线,它具有一定流向属性 且不可逆向,表示实际模型中信
号的流向。 表3-2列出了SIMULINK中信 号线基本操作方法的简单描述。
• 图3-5 模块的基本操作示例
表3-2 SIMULINK中信号线的基本操作方法
操作内容 在模块间 连线 移动线段
表3-1 SIMULINK中模块的基本操作方法
操作内容 选取模块
选中多个 模块
删除模块 调整模块
大小 移动模块
旋转模块
复制内部 模块
操作目的 从模块库浏览器中选 取需要的模块放入
SIMULINK 仿真平台窗
口中 可对多个模块同时进
simulink 的function模块参数
simulink 的function模块参数
Simulink中的Function模块参数主要分为两大类:基本参数和高级参数。
基本参数通常包括输入、输出、类型等,用于定义模块的基本属性。
而高级参数则根据模块的具体功能来设置,如传递函数、微分方程等。
参数设置主要通过模块参数对话框进行操作,用户可以在对话框中对参数进行修改、添加和删除等操作。
为了方便参数设置,Simulink还提供了参数
模板功能,用户可以自定义模板并应用于其他模块。
以编程的方式访问参数值,主要是通过使用get_param和set_param这两个函数,用编写M脚本的方法来设定模块参数值。
例如,创建一个名为myModel的Simulink模型,其中包含一个名为My Constant的Constant模块。
接下来,使用模块对话框将常量值参数设置为15。
要以编程方式返回参数值,可以使用函数get_param。
同样地,要以编程的方式
更改此值为25,可以使用函数set_param。
直接在模块的参数对话框中指定参数值也存在多种方法。
在打开的对话框中,配置数据对象属性,在值框中为参数指定一个数值,然后点击确定即可。
如需了解更多关于Simulink的Function模块参数的信息,建议查阅Simulink官方文档或咨询专业技术人员获取帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Wind Turbine 风力发电机
Wind Turbine Doubly-Fed Induction Generator (Phasor Type) 风力发电机组双馈感应发电机(相量型)
The Wind Turbine and the Doubly-Fed Induction Generator System 风力发电机和双馈感应发电机系统
需要注意的是随时间的变化适用于源,除了三个阶段的变化参数的类型被设置为振幅双表 时,在这种情况下,你可以申请仅限 A 相上的变化。 变异类型
指定的时间变化参数指定的参数被施加不同的变化。选择步骤编程步骤变化。选择斜坡 编程斜坡变化。选择调制方案调制的变化。选择振幅双表编写了一系列的一步变化幅度在特 定时间。 步进幅度 这个参数是唯一可见的,如果变异类型参数设置步骤。 指定的阶跃变化的振幅。指定的振幅的变化在正序振幅的 pu 中。 变化率 这个参数是唯一可见的,如果变异类型参数设置坡道。 指定的变化率,在伏/秒。中指定的电压变化率(pu 中的正序电压)/秒。 Goto 转到
电压测量 选择没有,如果你不想要测量三相电压。选择相对地,如果你要测量的相对地电压。选
择 相 - 相,如果你要测量的相相电压。 使用标签
如果选中,则发送的标记信号的电压测量。使用从块读取的电压。从块必须跳转到标签 对应的信号标签参数指定的标签。如果没有选择,电压测量可通过 Vabc 的功能块输出的。 信号标签
正序 伏 RMS 的相位,相位,以度为单位的相位,频率以赫兹为单位的三相电压的正序分量
的振幅。 随时间的变化 指定你要编程的时间变化的参数。选择“无”,如果你不想编程源参数随时间的变化。选择 幅度,如果你想编程的振幅随时间的变化。选择阶段,如果你要编程的相位随时间的变化。 选择频率,如果你想编程的频率随时间的变化。
系统。局部变量名括在方括号([])。 Scoped:范围的手段,从使用相同的标记和 Goto 块必须在同一子系统或低于转到标签
能见度块层次模型中的任何级别并不意味着穿越非虚子系统的边界,即一个原子,有条 件的边界执行或函数调用子系统或模型参考。一个范围的标记名称被括在大括号({})。 Global:从使用相同的标记和 Goto 块模型中,除了可以随时随地跨越非虚子系统边界 的位置。 Constant 常数
Wind Turbine Induction Generator (Phasor Type) 风力发电机组异步发电机(相量型)
Generator Data Parameters
标称功率,线到线电压和频率
额定功率(VA),标称线到线电压 Vrms 和标称系统频率(Hz)赫兹。 定子[RS,LLS](PU)
如果选中,则发送的标记信号的电流测量的。使用从块读取的电流。从块必须跳转到标 签对应的信号标签参数指定的标签。如果没有选择,IABC 可通过功能块输出的电流测量结 果是。 信号标签
指定的标签标记的电流测量。 电流的 PU
如果选中,三相电流测量 PU。否则,他们正在测量安培。 基本功率(VA3 期)
基数的三相电源,伏安(VA),用于将测得的电流 PU。基本功率(VA3 相)参数在对 话框中是不可见的,如果电流在 PU 未被选中。 如果电流如果电流单位。 Three-Phase Mutual Inductance Z1-Z0 三相互感 Z1-Z0
三相互感 Z1-Z0 块实现了三相平衡的相之间的相互耦合电感和电阻的阻抗。此块有三 绕组互感块相同的功能。对于三相平衡的电力系统,它提供了更方便的方式中的系统参数输 入的正序和零序电阻和电感中的系数参数比,互阻和互感。
正序参数 正序电阻 R1,在欧姆(Ω),正序电感 L1,亨(H)。 零序参数 零序电阻 R0,在欧姆(Ω),零序电感 L0,亨(H)。 Three-Phase Programmable Voltage Source 三相可编程电压源(三相无穷大电源)
需要注意的是随时间的变化适用于源,除了三个阶段的变化参数的类型被设置为振幅双 表时,在这种情况下,你可以申请仅限 A 相上的变化。 变异类型
指定的时间变化参数指定的参数被施加不同的变化。选择步骤编程步骤变化。选择斜坡 编程斜坡变化。选择调制方案调制的变化。选择振幅双表编写了一系列的一步变化幅度在特 定时间。 步进幅度 这个参数是唯一可见的,如果变异类型参数设置步骤。
选择块和行,以弥补子系统使用边界框,然后从“编辑”菜单中选择“创建子系统。的 Simulink ®软件与一个子系统块替换块。当您打开这个块时,“窗口将显示所选的块,你, 中添加 inport 的和外港块的,以反映信号,进入和离开的子系统的。
绘制子系统块的图标的输入端口的数量对应于子系统中的 import 的块的数量。同样地, 在上,画的块中的的的输出端口数对应于输出端口。块中的体子系统的数目。 3-Phase Active & Reactive Power (Phasor Type) 3 相有功和无功功率(相量型)
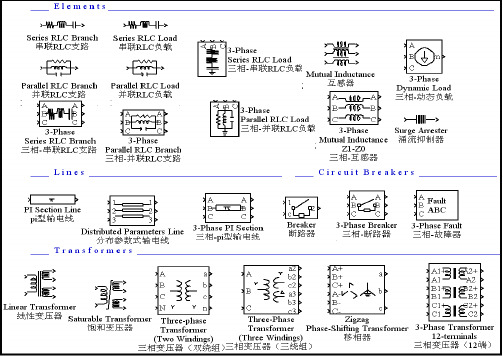
电力线路模块
PI Section Line
单项π 型线路单相传输线模块。
电阻,电感和电容的传输线,沿着线是均匀分布的。级联几个相同的 PI 部分是通过以 下方式获得一个近似的分布参数线路模型的 Three-Phase PI Section Line
三相电力线路模块实现了一个平衡的三相传输线模型参数集中在π 部分。相反,沿着线
想块把它解释为一个向量(即一维数组),选择解释向量参数为 1-D 参数,否则, 块把定值参数作为基质(即,一个 2-D 阵列)。
Manual Switch 手动开关
Static Synchronous Compensator (Phasor Type) 静止同步补偿(相量型)
Subsystem, Atomic Subsystem, Code Reuse Subsystem 子系统,原子子系统,代码重用子系统
指定的标签标记的电压测量。 在 PU 的电压
如果选中,三相电压测量 PU。否则,他们衡量单位为伏特。 基极电压(VRMS 相相)
的基极电压,伏特均方根用来转换测量电压在 PU。基极电压(VRMS 相相)参数是不 可见的对话框中的,如果没有被选中的电压 PU。 电流测量
如果你想测量三相电流流过块,选择“是”。 使用标签
指定的阶跃变化的振幅。指定的振幅的变化在正序振幅的 pu 中。 变化率 这个参数是唯一可见的,如果变异类型参数设置坡道。 指定的变化率,在伏/秒。中指定的电压变化率(pu 中的正序电压)/秒。 振幅调制 这个参数是唯一可见的,如果变化参数的类型被设置为调制。 指定为源的调制参数中指定的时间变化参数的幅度。当不同数量的电压振幅的调制,振幅在 积极序列振幅的 pu 中指定。 的调制频率 这个参数是唯一可见的,如果变化参数的类型被设置为调制。 源参数中指定的时间变化参数指定的频率的调制。 变化的时间(S) 指定的时间,在几秒钟内,在设定的时间变化生效的时间,当它停止。 基本和/或谐波产生 如果选中,可以进行编程,两个谐波叠加在基波电压源。
一个子系统块代表的系统,它其中包含它的一个子系统,该子系统块可以代表作为一个 虚的的体子系统或一个真正的的(原子的)体子系统,视的它的的当作原子单位(Atomic Unit) 参数的值上而定。原子子系统块是的子系统块具有其视为默认选中的原子单元参数。您创建 了一个子系统,在这些的方式中:
港口及子系统到模型库复制子系统(或原子能子系统)块。然后,您可以添加块到子系 统的,通过打开在 Subsystem 块和复制块的纳入其的窗口。
发电机额定值基于定子电阻 Rs 和泄漏电感 LLS 在 PU。 转子[RR',LLR'](PU)
转子电阻 Rr 和漏感 LLR'的,称为定子,在 PU 根据发生器的评分。 磁化电感 Lm(PU)
在 PU 的磁化电感 Lm 上的发电机额定值。 转动惯量,摩擦系数和极对的
组合的发电机和涡轮机的转动惯量 H 在秒,合并的粘性摩擦系数 F 中的普基于在发电 机上的评分和数量的极对数 p。
此块生成三相正弦电压随时间变化的参数。您可以设定的时间变动的振幅,相位或频率 的基波分量的源程序。此外,两个谐波可以被编程,并叠加在基波信号。 正序
伏 RMS 的相位,相位,以度为单位的相位,频率以赫兹为单位的三相电压的正序分量 的振幅。 随时间的变化
指定你要编程的时间变化的参数。选择“无”,如果你不想编程源参数随时间的变化。 选择幅度,如果你想编程的振幅随时间的变化。选择阶段,如果你要编程的相位随时间的变 化。选择频率,如果你想编程的频率随时间的变化。
转到块将其输入到其相应的从块。输入可以是任何数据类型的实际的或复值信号或矢 量。转到块允许您传递一个信号,从一个街区到另一个没有实际连接。一个 Goto 块可以通 过其输入信号从块不止一个,虽然从块可以接收到信号只能从一个转到块。该返回块的输入 被传递到来自虽然块进行物理连接,与它相关联的块。转到块和块的匹配转到标签,通过使 用标签参数中定义。 Local:在默认情况下,也就是说,从“和”返回块采用相同的标记,必须在相同的子
汽轮机数据参数
Rate Limiter 速率限制器
摆率上升 指定一个增加的输入信号的导数的限制。此参数是可调的固定点输入。
摆率下降 指定的降低输入信号的导数的限制。此参数是可调的固定点输入。
采样时间模式 指定采样时间模式,连续或继承自驱动块。
初始条件 设置初始输出的仿真。 Simulink 软件不允许你设置这个块的初始条件 INF 或 NaN。治
的电阻,电感和电容是均匀分布的分布参数线路模型,三相 PI 剖面线块肿块行参数在一个
单一的π 部分所示,在图中只有一相下代表。
被指定为正序和零序的,要考虑到的参数之间的感性和容性耦合的三相导体,以及地面 参数的参数 R,L,和 C 线。在此方法的指定行参数假设,这三个阶段是平衡的。
使用一个单一的 PI 部分的模型是适当的传输线或短,在感兴趣的频率范围是有限的基 频周围建模。你可以得到更准确的模型通过级联多个相同的块。见 PI 剖面线的最大频率范 围的说明,通过 PI 线模型,可以实现。