Zemax光学设计:一个带校正器的卡塞格林望远镜的设计实例
基于zemax的反射式系统的结构设计
基于zemax的反射式系统的结构设计基于zemax的反射式系统的结构设计11。
球面和非球面22。
典型的反射系统32。
1 牛顿望远镜(抛物面镜)42.2 经典卡塞格林系统52。
3 里奇—克列基昂(R—C系统)62。
4 格里高里系统92。
5 马克苏托夫—卡塞格林式102。
6 施密特-卡塞格林系统142。
7 施密特弯月形卡塞格林162。
8 达尔—奇克汉卡塞格林162.9 霍顿—卡塞格林(H—C系统)172.10 阿古诺夫—卡塞格林182。
11 普雷斯曼-卡米歇尔卡塞格林192。
12 ”离轴”或”斜反射”反射镜卡塞格林202。
13 三反-卡塞格林(Three-mirror Cassegrain)203. 反射式的特点214. 参考与鸣谢215。
附录221。
球面和非球面球面只用一个参数即表面半径(或曲率)来定义。
球面折射强烈,球差明显。
若使表面形状自光轴向外越来越平坦,则可以逐渐减小折射角,最终使所有光线会聚到同一焦点。
对比:球面边缘较陡,非球面平坦,可校正球差(主要应用).非球面不能只用一个曲率来定义,因其局部曲率在其表面范围内变化,常用解析公式描述,有时也用表面内坐标点的矢高表示。
最普遍形式是旋转对称的非球面,矢高为:22i i z a r =+∑,其中,c 为顶点处基本曲率,k 为圆锥曲线常数,r 为垂直光轴方向的径向坐标;2i i a r 为非球面的高次项。
圆锥曲线常数k表面类型 0 球面 K 〈—1 双曲面 K=—1 抛物面 —1〈k<0 椭球面 k>0扁椭球面当非球面非旋转对称时,将其表示成双锥形表面形式或变形非球面形式.双锥形表面有沿正交方向的两个基本曲率和两个圆锥曲线常数;变形非球面在两个正交方向上还附加高次项。
非球面的另一个形式是超环面(即复曲面),超环面具有环形面包圈的形状。
当非球面的高次项为0,非球面采用旋转对称的圆锥曲面横截面形式,其性质:A.不论反射面还是折射面,圆锥曲面对于一组特定的共轭点无球差。
基于某卡塞格林系统地望远物镜设计ZEMAX
工程光学课程设计报告班级:姓名:学号:成绩:指导教师:报告日期:目录摘要 (i)第一章绪论 (1)1.1课程设计题目 (1)1.2 设计要求 (1)第二章望远物镜的设计与相关参数 (2)2.1 望远物镜的主要参数 (2)2.2 望远物镜结构类型 (3)2.3 物镜的光学特性 (4)2.3 卡塞格林光学系统 (4)2.4 ZEMAX中的像质评价方法 (5)第三章设计与优化 (9)3.1设计过程 (9)3.2优化过程 (12)第四章运用Solid works对镜片进行绘制 (16)第五章新得与体会 (18)主要参考文献 (19)摘要由薄透镜组的初级像差理论入手,根据初级像差参量PW与透镜折射率n、孔径半径r、厚度d等关系,求出了满足初始设计的结构参数的透镜折射率n、孔径半径r、厚度d、形状系数Q、曲率p。
用光学设计软件ZEMAX对所求的结构参数进行了优化。
光学设计要完成的工作包括光学系统设计和光学结构设计。
所谓光学设计就是根据系统所提出的使用要求,来决定满足各种使用要求的数据,即设计出光学系统的性能参数、外形尺寸、各光组的结构等。
大体可以分为两个阶段。
第一阶段根据仪器总体的要求,从仪器的总体出发,拟定出光学系统原理图,并初步计算系统的外形尺寸,以及系统中各部分要求的光学特性等。
第二阶段是根据初步计算结果,确定每个透镜组的具体结构参数,以保证满足系统光学特性和成像要求。
这一阶段的设计成为“相差设计”,一般简称光学设计。
评价一个光学系统的好坏,一方面要看它的性能和成像质量,另一方面要系统的复杂度。
一个系统设计的好坏应该是在满足使用要求的情况下,结构设计最简单的系统。
第一章绪论1.1课程设计题目基于卡塞格林的望远物镜设计1.2 设计要求(1)入瞳直径:D=20mm;(2)相对孔径D/f’=1/6.15;(3)视场角2ω=7°;(4)在可见光波段设计(取d、F、C三种色光。
d为主波长);(5)MTF值在67lp/mm处大于0.40;(6)要求给出用ZEMAX优化减小球差和轴向色差的方法。
光学设计实验望远镜系统设计实验
光学设计实验报告——望远镜系统设计**:***学号:B********班级:B090103目录一、ZEMAX仿真二、设计优化三、数据比较和优化后参数四、公差分析五、光学系统图六、设计心得体会一ZEMAX仿真一、本次设计要求如下:1.焦距为100mm;2.光源为无穷远处;3.像空间F/﹟=4,相对孔径1/44.前一块玻璃为BAK1,后一块玻璃为F25.全视场角为8度先打开ZEMAX软件,根据设计要求修改系统设定,包括系统孔径,镜头单位,视场,和波长。
望远镜物镜要求校正的像差主要是轴向色差、球差、慧差。
根据要求采用的是折射式望远双胶合型(1)修改系统设定。
首先,根据要求的设计参数计算物方孔径EPD。
提供的有效焦距efl为100mm,像空间F/﹟=4。
由公式,得物方孔径EPD约等于25。
在ZEMAX主菜单软件中,选择系统> 通用配置,在弹出的对话框中,选择图象空间F/#,数值选择4。
(2)视场设定。
在ZEMAX主菜单软件中,选择系统> 视场,在弹出的对话框中,视场类型选择角度,并输入三组视场数据,(0,8), (0, 2.8)和 (0,4)。
第三步,波长设定。
在ZEMAX主菜单软件中,选择系统> 波长,在弹出的对话框中,单击选择完成配置,然后单击确定。
系统配置完毕,即可在LDE中输入数据。
选择分析>草图>2D草图,将出现2D草图LAYOUT。
第二部分设计优化从2D草图可以看出,镜头的性能参数并非最优。
选择编辑——》优化函数,反复进行修改权重,直到mtf达到最优。
选择工具 > 优化 > 优化在弹出的窗口中执行最终优化当优化开始时,ZEMAX 首先更新系统的评价函数。
第四部分:数据比较与优化后参数优化后2D草图:第五部分公差分析在菜单栏中点开Tools(工具)选中Tolerancing点OK然后点Editors选中Tolerance Data Editor在页面上点开Tools选中Default Tolerances点OK输入参数进行公差分析后得点开Tools 选中Test Plate Fitting出现对话框选择Best to woest 点OK,第五部分光学系统图第六部分设计心得体会通过光学课程设计,我不但学到了一些以前不懂的知识,而且更进一步学会使用了ZEMAX 常用的光学设计软件,同时,也锻炼了我们在学习新软件的能力,这不但是对新知识的学习,更是对新事物学习和接受能力的锻炼,因此我对此次光电课程设计感触和收获颇深!刚开始,我们对设计的总体思路都没有一个大概的印象,刚得到题目时,我们到图书馆和上网查阅资料,看了以前上试验课时的PPT和一些资料,才对要使用的软件有了较深入的了解,然后对着以前的设计课题,慢慢的探索和练习。
基于卡塞格林系统的望远物镜设计(ZEMAX)

工程光学课程设计报告班级:姓名:学号:成绩:指导教师:报告日期:南通大学课程设计论文目录摘要 (i)第一章绪论 (1)1.1课程设计题目 (1)1.2 设计要求 (1)第二章望远物镜的设计与相关参数 (2)2.1 望远物镜的主要参数 (2)2.2 望远物镜结构类型 (3)2.3 物镜的光学特性 (5)2.3 卡塞格林光学系统 (5)2.4 ZEMAX中的像质评价方法 (6)第三章设计与优化 (10)3.1设计过程 (10)3.2优化过程 (14)第四章运用Solid works对镜片进行绘制 (19)第五章新得与体会 (23)主要参考文献 (24)摘要由薄透镜组的初级像差理论入手,根据初级像差参量PW与透镜折射率n、孔径半径r、厚度d等关系,求出了满足初始设计的结构参数的透镜折射率n、孔径半径r、厚度d、形状系数Q、曲率p。
用光学设计软件ZEMAX对所求的结构参数进行了优化。
光学设计要完成的工作包括光学系统设计和光学结构设计。
所谓光学设计就是根据系统所提出的使用要求,来决定满足各种使用要求的数据,即设计出光学系统的性能参数、外形尺寸、各光组的结构等。
大体可以分为两个阶段。
第一阶段根据仪器总体的要求,从仪器的总体出发,拟定出光学系统原理图,并初步计算系统的外形尺寸,以及系统中各部分要求的光学特性等。
第二阶段是根据初步计算结果,确定每个透镜组的具体结构参数,以保证满足系统光学特性和成像要求。
这一阶段的设计成为“相差设计”,一般简称光学设计。
评价一个光学系统的好坏,一方面要看它的性能和成像质量,另一方面要系统的复杂度。
一个系统设计的好坏应该是在满足使用要求的情况下,结构设计最简单的系统。
第一章绪论1.1课程设计题目基于卡塞格林的望远物镜设计1.2 设计要求(1)入瞳直径:D=20mm;(2)相对孔径D/f’=1/6.15;(3)视场角2ω=7°;(4)在可见光波段设计(取d、F、C三种色光。
zemax实验学习教程
第19页/共101页
第十九页,编辑于星期日:八点 四十分。
第三章 ZEMAX设计实例
例9 扫面镜(Scanning Mirror) 再看其3D Layout图,如图所示,此时扫描镜关于后表面倾斜。
第20页/共101页
第二十页,编辑于星期日:八点 四十分。
第三章 ZEMAX设计实例
例10 离轴抛物镜(Off-Axis Parabolas)
第17页/共101页
第十七页,编辑于星期日:八点 四十分。
第三章 ZEMAX设计实例
例9 扫面镜(Scanning Mirror)
扫描镜分为两类:
Galvanometer反射镜和Polygon反射镜。 Galvanometer反射镜:镜面在顶点的倾斜; Polygon反射镜:在镜面顶点后面的一个偏置点处扫描。
现在移到第2面,在“tilt about x”列里输入45。 从主菜单选System,Update All,你将看到如图 所示的图形。
第3页/共101页
第三页,编辑于星期日:八点 四十分。
第三章 ZEMAX设计实例
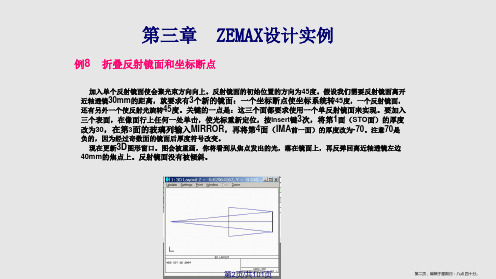
例8 折叠反射镜面和坐标断点
注意近轴镜片的厚度为30,位于第一个坐标断点的旋转顶点。 坐标断点的厚度是0,表示反射镜面是在同一点上。但是, 坐标断点已将坐标系统旋转了45度。镜面本身是不旋转 的,只有它所在的坐标系统,才被旋转。镜面的厚度为0, 因为我们在移到下一个面前,要旋转另一个45度。第二 个坐标断点先旋转另一个45度,然后向焦点移动-70个单位。 注意所有的倾斜和偏心处理应在厚度改变之前。
第三章 ZEMAX设计实例
例10 离轴抛物镜(Off-Axis Parabolas)
在反射镜面2的前面增加一个CB面,并设置该CB在Y方向有+80mm的平移量。
zemax光学设计例子
在光学设计中,Zemax是一款非常受欢迎的软件,它提供了强大的工具和功能,可以帮助设计师轻松地完成各种光学设计任务。
本文将通过一个具体的例子,向大家展示如何使用Zemax进行光学设计。
一、设计背景我们假设需要设计一款望远镜,需要观察远处的星空。
望远镜的主要性能指标包括放大倍率、像差和亮度。
我们需要通过Zemax软件,找到最佳的光学系统方案,以达到最佳的观察效果。
二、设计步骤1.建立基本光学系统模型:在Zemax中,我们需要建立一个基本的光学系统模型,包括望远镜的主镜和次镜。
可以通过手动输入镜片数据或者使用预设的镜片库来建立模型。
2.调整参数:在Zemax中,我们可以调整各种参数来优化望远镜的性能。
例如,可以通过调整放大倍率和亮度参数来找到最佳的观察效果。
3.检测像差:在调整参数后,我们需要检测望远镜的像差。
Zemax 提供了强大的像差检测功能,可以帮助我们找到镜片上的缺陷和误差。
4.优化镜片:根据检测结果,我们可以对镜片进行优化。
可以通过添加或删除镜片、调整镜片位置和角度等方式来改善望远镜的性能。
5.模拟观察:在完成镜片优化后,我们可以模拟观察望远镜的成像效果。
可以通过调整望远镜的焦距和观察角度来查看不同情况下的成像效果。
6.调整和优化:根据模拟观察结果,我们可以再次调整和优化望远镜的设计。
直到达到满意的观察效果为止。
三、设计结果经过一系列的设计和优化步骤,我们得到了一个满意的光学设计方案。
该方案包括两片反射镜,放大倍率为10倍,像差在可接受范围内,亮度较高。
通过Zemax模拟观察,成像效果清晰、稳定,符合我们的预期。
四、总结通过这个具体的例子,我们展示了如何使用Zemax进行光学设计。
虽然只是一个简单的望远镜设计,但是它涵盖了光学设计的基本步骤和技巧。
在实际应用中,光学设计需要考虑的因素很多,例如环境因素、成本预算、材料选择等。
Zemax提供了丰富的工具和功能,可以帮助设计师轻松应对各种挑战。
设计望远镜

利用光学软件zemax优化并设计了折返式卡塞格林望远镜系统 新型卡塞格林系统主次镜采用球面反射镜,避免了使用加工困难 和成本较高的非球面镜给出了利用zemax优化设计的整个过程, 并通过评价函数、点列图、光线扇面图以及光学传递函数的评 价手段对设计的系统进行评价和再优化,最终得到最好成像质 量的望远镜系统
此图为场曲曲线图,左图表示出了近轴焦点的漂移为 一个关于视场角的函数,而右 图则表示了有以近轴光线为基准的实际光线的畸变。 可以看出其轴向色差和初级球差大
弥散斑
调制传递函数(MTF)点扩散函数
左图衍射能量圈图。右图为多色光焦点漂移
在卡塞格林望远镜焦点处可以安置较大
的终端设备,并不挡光,且观测操作也 较方便。对于一个兼具有主焦点系统、 卡塞格林系统和折轴系统的望远镜,卡 塞格林望远镜的相对口径是中等的,它 适用于作中等光力、较大比例尺的照相 和其他工作,一般在这里进行的主要工 作有较大光谱仪的分光观测、直接照相 和像增强器照相、光电测光和红外观测 等。
意
6、Maksutov-Cassegrain 弯月透镜球面 球面 7、Schmidt-meniscus Cassegrain施密特校正器+弯 月透镜 球面 球面
ቤተ መጻሕፍቲ ባይዱ
8、Mangin-Cassegrain 多个球面透镜 球面 球面 9、Pressmann-Camichel 球面 椭圆面 10、Schiefspiegler 斜反射离轴 11、Three-mirror Cassegrain 三片反射镜 面型任意
这种设计在制造商提供给消费者的望远镜上非常 普遍,因为球面的光学表面不仅比长焦距的折射 式望远镜容易制做。虽然这类望远镜比同口径的 反射式望远镜价格要更昂贵,但是由于紧密的光 学设计使它在依订设计的口径之内很容易携带, 使它在严谨细致的天文爱好者中更受青睐,已经 成为目前主流的业余高端天象观测仪器。高的焦 比意味著它不同於前身的施密特摄星仪,不是一 架广角的望远镜,但是它狭窄的视野很适合观测 行星和深空天体。
密特—卡塞格林望远镜系统

实验四施密特—卡塞格林望远镜系统(Schmidt-Cassegrain)一、实验目的1.掌握Zemax中非球面镜面的定义与输入方法2.掌握Zemax中利用非球面镜的优化像差;3.熟悉Zemax中MTF的使用。
二、实验内容1.设计一个带多项式非球面矫正器施密特—卡塞格林系统;2.优化该系统的色球差。
三、实验器材1.p c机一台2.Z emax软件3.Z emax Manual一册(英文版)四、实验过程施密特-卡塞格林望远镜是在1931年由德国光学家施密特发明的优秀广视野望远镜。
在镜筒最前端的光学元件是施密特修正板,这块板是经过研磨接近平行的非球面薄透镜,可以确实的改正与消除主镜造成的球面像差。
自从1960年代,星特朗(Celestron)公司介绍了这一型的望远镜之后,数以万计的业余天文学家已经购买和使用过施密特-卡塞格林望远镜,直径从20厘米(8英寸)到48厘米(16英寸)都有。
本次实验是设计一个带多项式非球面矫正器施密特—卡塞格林系统 (Schmidt-Cassegrain) 。
设计的使用范围为可见光谱。
我们将采用10英寸的孔径,10英寸的后焦距(从主镜的后面到焦点)。
输入数据:由于只有矫正板和主反射面,进行这个设计是比较简单的,因此我们开始时先在光阑后插入两个面。
选择“SYSTEM”,“GENERAL”,输入10作为孔径值。
在同一个屏幕上,将单位“毫米(Millimeters)”改为“英寸(Inches)”。
选择“SYSTEM”,“WAVELENGTHS”,得到“波长数据”屏幕,设置3个波长:486,587,和656,其中587为主波长。
现在,我们将使用缺省的视场角0度,在Lens Data Editor中输入数据,如下表。
光阑被放在主面曲率半径的中心,这是为了排除视场像差(如彗差),它是Schmidt设计的特点。
我们可以选择2D Layout演示一下图形以验证一切是否就绪。
现在我们将加入辅助镜面,并安放像平面。
施密特-卡塞格林望远镜的设计(一)

施密特-卡塞格林望远镜的设计(一)摘要 ZEMAX光学设计程序是一个完整的光学设计软件,包括光学设计需要的所有功能,可以在实践中对所有光学系统进行设计,优化,分析,并具有容差能力,所有这些强大的功能都直观的呈现于用户界面中。
ZEMAX功能强大,速度快,灵活方便,是一个很好的综合性程序。
ZEMAX能够模拟连续和非连续成像系统及非成像系统。
关键字:光学,模拟1.Zmax软件的介绍 ZEMAX 是一套综合性的光学设计仿真软件,它将实际光学系统的设计概念、优化、分析、公差以及报表集成在一起。
ZEMAX 不只是透镜设计软件而已,更是全功能的光学设计分析软件,具有直观、功能强大、灵活、快速、容易使用等优点,与其他软件不同的是 ZEMAX 的 CAD 转档程序都是双向的,如 IGES 、 STEP 、 SAT 等格式都可转入及转出。
而且 ZEMAX可仿真 Sequential 和 Non-Sequential 的成像系统和非成像系统, ZEMAX 当前有: SE 及 EE 两种版本。
序列性( Sequential )光线追迹大多数的成像系统都可由一组的光学表面来描述,光线按照表面的顺序进行追迹。
如相机镜头、望远镜镜头、显微镜镜头等。
ZEMAX 拥有很多优点,如光线追迹速度快、可以直接优化并进行公差计算。
ZEMAX 中的光学表面可以是反射面、折射面或绕射面,也可以创建因光学薄膜造成不同穿透率的光学面特性;表面之间的介质可以是等向性的,如玻璃或空气,也可以是任意的渐变折射率分布,折射率可以是位置、波长、温度或其它特性参数的函数。
同时也支持双折射材料,其折射率是偏振态和光线角度的函数。
在 ZEMAX 中所有描述表面的特性参数包括形状、折射、反射、折射率、渐变折射率、温度系数、穿透率和绕射阶数都可以自行定义。
非序列性( Non-Sequential )光线追迹很多重要的光学系统不能用 Sequential 光线追迹的模式描述,例如复杂的棱镜、光机、照明系统、微表面反射镜、非成像系统或任意形状的对象等,此外散射和杂散光也不能用序列性分析模式。
实验4:施密特-卡塞格林式望远镜

条件: 设計一个施密特-卡塞格林式望远镜
结构设计
10inches,aperture 10inches,back focus
一、启动ZEMAX 菜单、工具条、状态栏、工作区。
二、输入孔径
三、输入波长
点击Select按扭
四、输入透镜结构参数
五、查看Layout
七、在LEDS EDITER中加入第二个反射镜
八、再次查看Layout
十、使用merit function
十一、优化结果
十二、改变第一个面为非球面
十三、改变第一个面的曲率半径
十四、 调整field angle
十五、 MTF
十六、 加孔
江汉大学物理与信息工程学院物理学系
光学设计
作者:柯璇 E-MAIL: kexuanwh@
实验四 施密特-卡塞格林式望远镜 Schmidt-Cassegrain和aspheric corrector
实验目的:
学会使用 非球面,polynomial aspheric surface; 渐晕,obscurations; apertures, solves, optimization, layouts, MTF plots.
物理光学课程设计-ZEMAX软件设计望远镜并校正像差
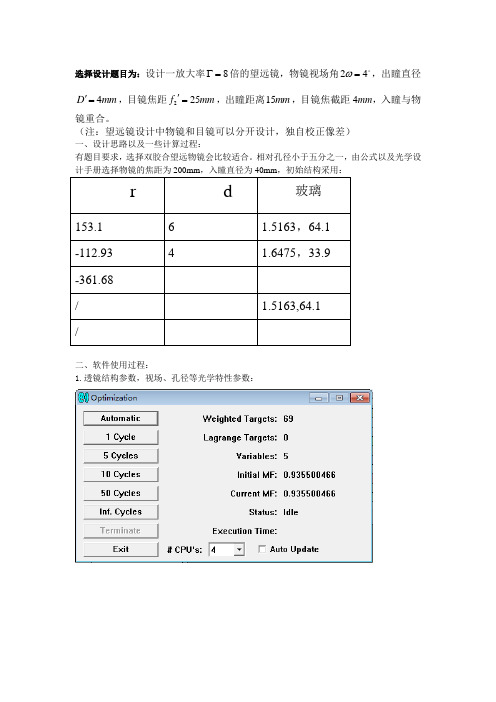
选择设计题目为:设计一放大率8Γ=倍的望远镜,物镜视场角24ω=,出瞳直径4D mm '=,目镜焦距225f mm '=,出瞳距离15mm ,目镜焦截距4mm ,入瞳与物镜重合。
(注:望远镜设计中物镜和目镜可以分开设计,独自校正像差)一、设计思路以及一些计算过程:有题目要求,选择双胶合望远物镜会比较适合。
相对孔径小于五分之一,由公式以及光学设计手册选择物镜的焦距为200mm ,入瞳直径为40mm ,初始结构采用:rd 玻璃 153.16 1.5163,64.1 -112.934 1.6475,33.9 -361.68/1.5163,64.1 /二、软件使用过程:1.透镜结构参数,视场、孔径等光学特性参数:初始结构表:优化情况:System/Prescription DataGENERAL LENS DATA:Surfaces : 7Stop : 1System Aperture : Entrance Pupil Diameter = 40Glass Catalogs : SCHOTTRay Aiming : OffApodization : Uniform, factor = 0.00000E+000Effective Focal Length : 320 (in air at system temperature and pressure)Effective Focal Length : 320 (in image space)Back Focal Length : 310.63Total Track : 775.2221Image Space F/# : 8Paraxial Working F/# : 8Working F/# : 8.002776Image Space NA : 0.06237829Object Space NA : 2e-009Stop Radius : 20Paraxial Image Height : 11.17465Paraxial Magnification : 0Entrance Pupil Diameter : 40Entrance Pupil Position : 0Exit Pupil Diameter : 102.5804Exit Pupil Position : 820.7951Field Type : Angle in degrees Maximum Field : 2Primary Wave : 0.5875618Lens Units : MillimetersAngular Magnification : -0.3899379Fields : 3Field Type: Angle in degrees# X-Value Y-Value Weight1 0.000000 0.000000 1.0000002 0.000000 1.414000 1.0000003 0.000000 2.000000 1.000000Vignetting Factors# VDX VDY VCX VCY VAN1 0.000000 0.000000 0.000000 0.000000 0.0000002 0.000000 0.000000 0.000000 0.000000 0.0000003 0.000000 0.000000 0.000000 0.000000 0.000000Wavelengths : 3Units: オm# Value Weight1 0.486133 1.0000002 0.587562 1.0000003 0.656273 1.000000EDGE THICKNESS DATA:Surf EdgeSTO 439.9418312 11.4721633 11.6235514 312.1845555 0.0000006 0.000000IMA 0.000000INDEX OF REFRACTION DATA:Surf Glass Temp Pres 0.486133 0.5875620.6562730 20.00 1.00 1.00000000 1.000000001.000000001 20.00 1.00 1.00000000 1.000000001.000000002 SSK4A 20.00 1.00 1.62546752 1.617649751.614266423 LAF9 20.00 1.00 1.81494560 1.795040281.786944504 20.00 1.00 1.00000000 1.000000001.000000005 20.00 1.00 1.00000000 1.000000001.000000006 20.00 1.00 1.00000000 1.000000001.000000007 20.00 1.00 1.00000000 1.000000001.00000000THERMAL COEFFICIENT OF EXPANSION DATA:Surf Glass TCE *10E-60 0.000000001 0.000000002 SSK4A 6.100000003 LAF9 7.200000004 0.000000005 0.000000006 0.000000007 0.00000000F/# DATA:F/# calculations consider vignetting factors and ignore surface apertures.Wavelength: 0.486133 0.5875620.656273# Field Tan Sag Tan Sag Tan Sag1 0.0000 deg: 8.0042 8.0042 8.0028 8.0028 8.0075 8.00752 1.4140 deg: 7.9964 8.0019 7.9936 8.0001 7.9978 8.00473 2.0000 deg: 7.9889 7.9997 7.9847 7.9974 7.9884 8.0018CARDINAL POINTS:Object space positions are measured with respect to surface 1.Image space positions are measured with respect to the image surface.The index in both the object space and image space is considered.Object Space Image SpaceW = 0.486133Focal Length : -319.976306 319.976306Focal Planes : 124.738587 0.170547Principal Planes : 444.714892 -319.805758Anti-Principal Planes : -195.237719 320.146853Nodal Planes : 444.714892 -319.805758Anti-Nodal Planes : -195.237719 320.146853W = 0.587562 (Primary)Focal Length : -320.000000 320.000000Focal Planes : 124.780118 0.151516Principal Planes : 444.780118 -319.848484Anti-Principal Planes : -195.219882 320.151516Nodal Planes : 444.780118 -319.848484Anti-Nodal Planes : -195.219882 320.151516W = 0.656273Focal Length : -320.220323 320.220323Focal Planes : 124.586499 0.352767Principal Planes : 444.806822 -319.867556Anti-Principal Planes : -195.633824 320.573090Nodal Planes : 444.806822 -319.867556Anti-Nodal Planes : -195.633824 320.5730902.像差指标数据:球差数据分析图:三、学习心得这次的光学设计要结束了,在这里我首先得思过一下,这次的课设可真的是糊里糊涂就过去了。
卡塞格林望远物镜设计报告

卡塞格林望远物镜设计报告1. 引言卡塞格林望远物镜是一种常用于天文观测的光学系统。
本报告旨在介绍卡塞格林望远物镜的设计原理和关键参数,并给出一个实际设计案例。
2. 设计原理卡塞格林望远物镜是一种反射式望远镜,其基本原理是通过反射光学,将被观测的光线从主镜反射至副镜,再通过副镜反射至焦平面。
主要由主镜和副镜组成。
- 主镜:是卡塞格林望远物镜的核心元件,一般采用抛物面形状,其作用是将光线反射至副镜。
- 副镜:位于主镜焦点处,用于反射光线至焦平面。
副镜一般采用凹球面或椭球面形状。
3. 关键参数卡塞格林望远物镜的性能与以下关键参数密切相关:- 主镜直径:直径越大,光收集能力越强,分辨率越高。
- 主镜焦距:焦距决定物镜的放大倍数和视场大小。
- 副镜曲率半径:副镜曲率半径与主镜焦距、视场大小等参数相互关联。
- 副镜直径:副镜直径要足够大,以保证充分接收主镜反射的光线。
4. 设计案例我们以设计口径为200mm的卡塞格林望远物镜为例进行设计。
4.1 主镜设计根据经验公式,我们选择主镜直径为200mm,焦距为1000mm。
接着,我们根据主镜直径和焦距计算主镜的曲率半径。
根据抛物面公式,我们得到主镜曲率半径为2000mm。
进一步,我们可以绘制光线追迹图,校验主镜的设计是否能将光线反射到副镜。
4.2 副镜设计根据主镜焦距和视场要求,我们选择副镜焦距为200mm。
根据凹球面公式,我们可以计算出副镜的曲率半径为400mm。
我们还需要确定副镜直径,保证副镜能够接收到主镜反射的光线。
根据实际经验,我们可以将副镜直径设定为主镜直径的一半,即100mm。
4.3 光学系统检查在设计完成后,我们需要对整个卡塞格林望远物镜的光学系统进行检查。
可以通过光路追迹和MTF(调制传递函数)等方法,评估物镜的成像能力、分辨率、畸变等性能指标。
5. 结论本报告介绍了卡塞格林望远物镜的设计原理和关键参数,并给出了一个实际的设计案例。
卡塞格林望远物镜以其紧凑、高分辨率的特点,在天文观测领域得到了广泛应用。
基于卡塞格林系统的望远物镜设计

基于卡塞格林系统的望远物镜设计在望远镜的设计中,物镜是非常重要的一个组成部分。
物镜的设计好坏直接影响到望远镜的成像质量。
而卡塞格林系统是一种常见且广泛应用的望远镜设计系统,由于它能够有效减少色差和减小像差,因此被广泛应用于天文望远镜的设计中。
在进行望远物镜设计时,我们可以借助ZEMAX这个光学设计软件来进行仿真和优化。
下面介绍一下基于卡塞格林系统的望远物镜设计的一般流程。
1.确定设计目标:首先,我们需要明确望远物镜的设计目标,例如视场角、放大倍数、像差控制要求等。
这些目标将指导我们在后续的设计优化中进行权衡。
2.设定初始参数:根据设计目标,我们需要设定一些初始参数,例如物镜焦距、透镜数量、透镜曲率等。
这些参数将作为优化的初始值,通过反复迭代进行微调和优化。
3.光学系统设置:在ZEMAX中,我们可以建立光学系统模型,添加透镜元件,并设置透镜的表面特性和材料属性。
同时,还需要设定入射光源和接收面的位置和特性,以便进行成像仿真。
4.成像分析:通过ZEMAX提供的成像仿真功能,我们可以对光线经过透镜系统后的成像质量进行评估。
这包括检查像差情况、确定像散和色差等指标,以及评估成像质量。
5.优化设计:根据实际仿真结果,我们可以通过调整透镜的参数和几何形状来优化设计。
在ZEMAX中,可以通过参数化的方式对透镜的曲率、厚度等参数进行微调。
通过多次迭代优化,逐步改善成像质量。
6.结果分析:优化设计完成后,我们需要重新进行光学仿真,并对结果进行分析。
这包括观察成像质量是否满足设计要求,如视场平直度、成像质量等。
同时,还要对颜色像差进行分析,确保色差控制得到满足。
7.性能评估:在设计完成后,我们可以通过ZEMAX提供的光学分析工具对望远物镜的性能进行评估。
如成像分辨率、MTF曲线等。
通过这些评估结果,我们可以确定设计的优劣,并进行必要的改进和调整。
总结来说,基于卡塞格林系统的望远物镜设计是一个复杂而繁琐的过程。
ZEMAX作为光学设计软件,提供了强大的工具和功能,可以帮助我们进行光学仿真、优化和结果分析。
ZEMAX光学设计软件应用训练实验报告

东莞理工学院
ZEMAX光学设计软件应用训练实验报告
选择“analysis”,“miscellaneous”,“field curv/dist”场曲线如图所示。
牛顿式反射望远镜结构示意图
.输入数据:第一面,光阑面的曲率半径列输入-2000.0,负号表示为凹面,
列输入“MIRROR”。
选择“System”,“General”,然后在“通用数据对话框(
Box)”中输入一个200的孔径值,并单击“OK”。
ZEMAX使用的缺省值是波长
现在打开一个图层窗口,光线显示了从第一面到像平面的轨迹,此时像平面在镜面的左边。
如下图:
2.构造转折面:第一面的厚度改为-800mm。
像平面,按Insert在主面与像平面之间插入一个虚构
思考题与实践题:
1、牛顿反射式望远镜属于我们《应用光学》书本上所介绍的那种望远镜系统?
注意我们已将主反射面的距离减小到-18,第四面的半径已经被加入了一个变量标记。
新图层,检查一切是否正常。
如下图:
注意大约有4个波长的像差仍然有待改正。
现在单击第一面(光阑面)的“
设置第一面的半径为变量,再次优化(Tools,Optimization,Automatic
从主菜单,选SYSTEM,FIELDS,并将视场角的个数设置为3,输入y-
在评价函数编辑时,选Tools,Default Merit Function,并将RINGS
在遮挡器和辅助镜面之间的小缝隙纯粹是很小的一点。
这里是为了更容易让大家看到。
MTF现在已被主要是辅助镜面产生的遮挡所改变。
更新MTF窗口,看一下新的MTF,如下图:。
基于zemax的新型折返式卡塞格林望远镜系统设计

基于zemax的新型折返式卡塞格林望远镜系统设计钱超;张金业【摘要】利用光学软件zemax优化并设计了折返式卡塞格林望远镜系统.新型卡塞格林系统主次镜采用球面反射镜,避免了使用加工困难和成本较高的非球面镜.给出了利用zemax优化设计的整个过程,并通过评价函数、点列图、光线扇面图以及光学传递函数的评价手段对设计的系统进行评价和再优化,最终得到最好成像质量的望远镜系统.【期刊名称】《湖北工业大学学报》【年(卷),期】2013(028)005【总页数】5页(P18-22)【关键词】卡塞格林;zemax;折反射系统;优化【作者】钱超;张金业【作者单位】湖北工业大学理学院,湖北武汉430068;湖北工业大学理学院,湖北武汉430068【正文语种】中文【中图分类】TN202;O43计算机技术的发展不仅使光学设计工作从繁杂性和庞大的计算工作中解放出来,而且给光学设计带来了新的活力.光学设计问题从数学角度看,就是建立和求解像差方程组[1].卡塞格林望远镜因其能在较小的结构尺寸内获得较长的焦距,所以其在天文观测以及激光雷达回波的接收领域有着广泛应用.但是由于非球面镜的加工难度及成本问题,制造一台口径大的卡塞格林式望远镜的工艺要求极其严苛,加工工艺以及非球面镜的质量将直接影响望远镜的成像质量.相比较而言球面镜的加工则相对容易得多,再加上校正透镜来校正球面镜在非傍轴区产生的像差,则可大大降低卡式系统的加工难度和加工成本.1 卡塞格林望远镜基本结构和工作原理反射式望远镜通常由主镜和次镜构成,卡塞格林望远镜也不例外.其主镜为抛物面的凹面反射镜,次镜为双曲面的凸面反射镜.主镜抛物面的焦点与次镜双曲面的左焦点重合,这样入射的平行光将汇聚在双曲面的另一焦点处.这种类型的望远镜系统在后来的许多领域都有过广泛的应用[2].随着科技的发展,卡式系统的结构不断得到改进,随之出现加施密特校正板的卡塞格林望远镜、Maksutov卡塞格林望远镜等带有折射元件的卡塞格林望远镜,以增大视场.这种类型的望远镜后来被定义为折反射光学系统望远镜.2 基于Zemax的设计2.1 初始结构在设计之初只要给出系统的筒长和像面位置,主次面的曲率半径只需给出大致的值,系统最前面的平板玻璃是折射元件的雏形.在需要加入透镜时,只要改变平板玻璃两个面的曲率半径即可,由几何光学的知识可知,它不会影响系统的像差及色差.这块平板玻璃还有另一个作用:在设计之初,它并不产生像差,所有的像差均由主次镜的球面镜产生;在改变其两个面的曲率半径即加入校正透镜后,通过观察评价图表可以看出其像差的明显变化,这些变化就是由于透镜校正了部分像差.所以通过加入这块平板玻璃可方便对比系统前后的成像质量变化.系统的初始结构如图1所示.图 1 系统的结构示意图,cm2.2 默认评价函数的创建将主次镜的曲率半径设为变量后,创建默认评价函数(图2).图 2 镜头编辑器在上述镜头编辑器中,Radius表示曲面的曲率半径;thickness表示此面与下一面的距离;glass表示玻璃的类型,玻璃平板采用BK7(nf=1.52238,nd=1.51680,nc=1.51432)玻璃,图3的Default Merit Function(默认评价函数)对话框由四组选项构成:Optimization Function and Reference(优化函数和参考点)、PupilIntergration Method(人瞳积分式),Thickness Boundary Values(厚度间隔边界条件)和评价函数其它辅助选项.默认评价函数通过使用4个基本选择:优化类型、像差类型、像差计算参考点和入瞳积分方式来构建.图 3 创建默认评价函数在Optimization Function Reference(优化函数和参考点)一项中,RMS为默认的优化类型,表示评价函数由像差的均方根偏差组成;wavefront表示采用的像差类型为波像差,其单位为λ;Centroid表示像差计算的参考点为弥散斑的质心.ZEMAX中像差值计算是追迹视场中代表物点发出若干条光线实现的,ZEMAX提供了两种光线通过人瞳的分布形式:高斯积分(Gaussian Quadrature)法和矩阵(Rectangular Array)法.GQ法中通过设定轴对称入瞳面上划分的环带数(Rings)以及沿每个环上的半径臂数 (Arms ),确定每个视场和每种波长将被追迹的光线; RA 法中则通过设定入瞳面上的网格(Grid ),对轴对称的入瞳按照正方形进行各种密度的抽样,确定每个视场和每种波长将被追迹的光线.如果网格上的光线落在入瞳之外,那么这条光线将被自动省略,因此实际使用的光线要比Grid的乘积少(图4).在上面的两种算法中,GQ算法在所有实际意义的算法中具有很大的优势,它比其他方法精确并且所需要追迹的光线较少,计算速度较快,并且具有中心对称的特性,有利于减少所需要追迹的光线[1].图 4 两种光线的入瞳分布方式第三栏为厚度边界值设定,用于设定评价函数中对空气间隔和(或)玻璃厚度的边界约束.第四栏为其他辅助选项,通常勾选中其中的Assume Axial Symmetry(假设轴对称)一项,这样在构造和计算评价函数时,默认评价函数将认为光学系统是左右对称和旋转对称的,此时更少的光线将被追迹,优化速度快而不降低精度.若在设计非旋转对称系统时,此项可不选.Ignore Lateral Color(忽略垂轴色差)复选框默认条件下不予选择.Start At(起始为序)用来设定Merit FunctionEditor(默认函数编辑器)中加入默认评价函数的操作符的起始行序.Overall Weight(全部权重)文本框:默认值为1,表示构建默认评价函数时,操作符原默认权重和权重.设置好所有的约束条件后,点击OK生成图5的MFE(默认评价函数编辑器).第一列为操作数序号.第二列为操作数类型:MNCG、MXCG、MNEG、MXEG操作符用来约束玻璃的边界条件;OPDX用来指定Wave,(Hx,Hy),(Px,Py)光线相对于一个移动和倾斜的球面的光程差.该球面可以使RMS波前差最小化,ZEMAX 用质心作为参考.默认评价函数创建后调用优化,优化后系统的评价函数的值为0.0746.此值越小表示系统的性能越好(图6).图6中:“Automatic”表示自动执行优化循环,直到系统优化不再有明显改善为止;“1 Cycle、5Cycle、10 Cycle、50 Cycle”分别表示执行1、5、10和50次优化循环;“Inf. Cycle”表示执行无限次循环,直到按下“Terminate”按钮为止;“Terminate”表示终止循环;“#CPU’s”表示分配运算的cpu核心数;“Algorithm”表示在下拉菜单中可选择合适的优化算法;“Variable”表示“设定的变量个数”.图 5 默认评价函数图 6 优化操作图优化完成之后,可以通过点列图来查看初步优化后系统的成像质量如何.在理想光学系统中,经入瞳的平行光线会汇聚在像面的某点处,但在实际的成像过程中,由于球差、色差等因素的存在,经入瞳的平行光线并不能严格汇聚在像面的某点处,而是在此点处形成一个弥散斑,理论上该弥散斑的半径越小越好.在zemax中有两种对弥散斑半径的描述,它们分别是RMS Radius(均方根半径)、GEORadius(几何半径).前者是追迹每条光线到达像面后的坐标平方和然后再除以点的数量后再开方的值,这个值能近似反映弥散斑的质量;后者则表示弥散斑的最大半径.光线经球面镜反射后形成的弥散斑,主要还和球面镜几何性质有关.抛物线、椭圆以及双曲线都是有焦点一说的:从抛物线凹的一面入射的平行光经抛物面反射后会汇聚在其焦点处;从椭圆一焦点发出的发散光镜椭圆面反射后会汇聚在另一焦点处;汇聚到双曲线一焦点处的光线经双曲面反射后会汇聚到另一焦点处.虽然圆却没有这种性质,但是在几何光学中可近似地认为:在傍轴条件下,其焦点在圆心与曲面顶点的中心处.这可以由物像公式[3]得出1l'+ 1l= 2f,l'=∞,所以l=r2.但这仅仅在傍轴条件下才成立,对于望远镜这种大孔径系统来说很难做到.由于系统主要采用反射镜设计,而且平板玻璃不产生任何单色像差和色差,所以此时的系统是没有色差的,这在图7中得到了充分的体现,因为 F、D、C三种颜色的弥散斑是严格重合的.但是点列图的中心结构是放射状的,这说明此时系统存在着离焦,这样较大的弥散斑直径就不可避免了.图 7 点列图在实际的成像过程中,无穷远处的光线并不是严格的汇聚在某一点的,所以对整个入瞳而言,球面镜的球差是不可消除的.在点列图中RMS Radius 为13.76 μm;GEO Radius 为24.131 μm,这两个半径均可以通过引入校正透镜来降低.2.3 优化后成像质量评价初步的优化完成后,为了使系统的性能得到更大的提升,还需要对其进行更进一步的优化.在初步的优化中只引入了两个变量,即主次镜的曲率半径,这一步仅仅通过控制这两个量来减小像面上球差.现在要将透镜引入,并同时控制主次面的曲率半径,透镜的引入只要将之前的平板玻璃的两个面设为变量即可.按照上面的步骤创建默认评价函数并运行优化之后的LDE(镜头数据编辑器)如图8所示.图 8 镜头编辑器从图9中可以看到,此时系统的评价函数下降到0.000 34.评价函数的下降表示透镜的引入对成像质量有了较为明显的改善.图 9 优化操作图系统的2D结构图如图10所示.图10 系统的2D模型2.4 系统的图表分析系统的结构设计及优化已经基本完成,接下来要用zemax给出的分析图表判断所设计系统的成像优劣.主要通过点列图(SPOT DIAGRAM)、光线扇面图(RAY FAN)、光程差图(OPD)以及MTF函数来分析.图11 点列图与图7相比,因为引入了透射元件,所以色差被引入,点列图的半径有所下降.RMS RADIUS从0.436下降到0.256;GEO RADIUS从0.977下降到0.549.这两个半径都不超过1 μm ,所以此时的色差相对而言也是很小的.点列图中心的放射状结构消失,大部分光线都集中在点列图中央,可以认为此时离焦的情况已基本消除.图12给出了视场角为0°时的横向球差曲线.横坐标表示系统的入瞳,纵坐标为横向球差的值.从图中可以得出系统横向球差与入瞳半径的关系,原点附近曲线的斜率还可以反映系统的离焦情况.此时纵坐标的最大横向球差为1 μm,总体球差都控制在0.5 μm之内;代表F、D、C三种色光的曲线彼此之间离得很近,这说明色差是很小的;原点附近的曲率也可以证实上面点列图的判断结果.图12 光线扇面图图13 光程差图图13给出了系统的光程差曲线,它表示不同入瞳高度的光线经过系统后到达像面时的光程与主光线的光程之差.根据瑞利判据,当最大光程差小于波长的1/4可以认为是理想成像[4].此时图中纵坐标的最大光程差下降到0.01个波长,远小于瑞利判据的0.25个波长.3 最终系统设计结构最后为了模拟次镜对光线的遮挡,在系统第一面与主镜之间加入一个半径与次镜相同的辅助镜面,并在主镜中心开一个半径为0.5 cm的圆孔以便让光线通过并与后方的目视系统衔接.最终的系统结构如图14所示.图14 最终系统的2D及3D模型由于遮拦面的加入,MTF曲线在中频部分有所下降.图15中,当MTF的值为0.1时,最大分辨率为229线对/mm.MTF曲线的低频反映轮廓,中频反映层次,高频反映细节.在60线对/mm处,MTF的值为0.4,此时系统能准确的反映出物体的轮廓,但是细节反映较差.图15 MTF曲线上面的各项图表都是在视场角为0°的情况下得出的.从图16中可以看出系统的视场角非常小的,虽然视场角的变化不大,但是MTF曲线的下降非常明显,成像质量也随之下降.这说明,系统的视场角依然非常小.小视场是卡塞格林望远镜的缺点之一,虽然本设计中的卡式望远镜的主次镜都采用球面镜,并且通过透镜校正了球面镜的球差,这虽然降低了成本和加工难度,但是系统的视场并没有因此而变大.图16 视场角分别为0°、0.3°、0.5°时的MTF曲线4 结束语采用球面镜的卡塞格林系统,降低了系统镜面的加工难度和加工成本,并且利用透射元件校正了两球面镜的固有球差.在视场角为0°时,从各项分析图表来看,该系统具有较好的成像质量,但是当视场角变化很小时,成像质量便有了较严重的恶化,该缺点可以通过增加更复杂的前置透镜组和后置透镜组来解决,这是以后工作中所要解决的问题.[ 参考文献 ][1] 迟泽英,陈文建.应用光学与光学设计基础[M].南京:东南大学出版社,2008:467-501.[2] 潘君骅.一个新的泛卡塞格林望远镜系统[D].江苏:苏州大学图书馆,2007.[3] 张以谟.应用光学[M].北京:电子工业出版社,2008:345-360.[4] 刘钧,高明.光学设计[M].北京:国防工业出版社,2012:10-95.。
毕业论文(设计)基于zemax的光学系统设计报告—内调焦望远物镜的设计

目录一、前言 (1)二、设计技术参数 (1)三、外形尺寸计算 (2)四、初始结构的选型和计算 (6)五、利用zemax优化及评价 (8)六、设计心得体会 (12)七、参考文献 (13)内调焦望远物镜的设计一、前言内调焦望远镜是一种具有多种用途、使用方便的光学检调仪器,它可以作为自准直仪和可调焦望远镜使用。
因此它广泛地应用于光学实验室、光学加工车间和光学装校车间作为检验和调校工具。
例如,作为内调焦望远镜使用时:可以用来检验导轨、平面或直尺的“直线性”,基面之间的“垂直性”,平面之间的“平行性”以及不同直径孔径之间的“同轴性”;作为自准直仪使用时:可检测平面间的角度,光学平行平板两表面的楔角以及观测星点等等。
内调焦是针对外调焦而言的,外调焦是指通过直接移动目镜或者物镜进行调焦,内调焦是指移动镜头组之间的一组镜片来调焦.内调焦广泛运用在某类结构的防水产品上,优点是密封性好一些,但是若设计不当视野会相对窄。
二、设计技术参数技术条件如下:相对孔径D/f’=1/6.58合成焦距f’=250mm物镜筒长L=165mm(薄透镜筒长)物方半视场角w=-2°三、外形尺寸计算根据上图进行光路计算2'(101)12012/'l f d d L f Q ϕϕϕϕϕϕ=-=+-=式中,L ,f ’已知,当假设d0后便可由上述三式求得φ1、φ2、和l2’。
相应地,φ1、φ2可按下述二式求得11/1'1/0/0'1/'21/2'(')/0(0)f d L d f f f f L d d L ϕϕ==-+==--计算结果如表所示 d0/mm 25 50 75 82.5 100 125 150 165 f1’/mm56.81892.595117.18123.13135.14148.81159.57165f2’/mm-41.17-67.65-79.41-80.10-76.47-58.82-26.47由上表知,当Q 给定后,f1’随d0的增加而增加,-f2’开始随d 的增加而增加,到L/2时随d0的增大而减小。
带有非球面矫正器的施密特—卡塞格林系统

目录摘要 (I)Abstract (II)1绪论 (1)2 光学设计软件ZEMAX介绍 (2)3卡塞格林望远镜的结构及工作原理 (4)3.1卡塞格林望远镜的基本组成 (4)2.2经典的卡塞格林系统工作原理 (5)3施密特-卡塞格林系统 (6)4带有非球面矫正器的施密特-卡塞格林系统的设计 (8)5 施密特-卡塞格林系统的仿真分析 (20)5.1 系统的波像均方差(OPD)分析 (20)5.2 系统的光学传递函数(MTF)分析 (20)6心得体会 (22)参考文献 (23)摘要望远镜是一种利用凹透镜和凸透镜观测遥远物体的光学仪器。
利用通过透镜的光线折射或光线被凹镜反射使之进入小孔并会聚成像,再经过一个放大目镜而被看到。
又称“千里镜”。
望远镜的第一个作用是放大远处物体的张角,使人眼能看清角距更小的细节。
望远镜第二个作用是把物镜收集到的比瞳孔直径(最大8毫米)粗得多的光束,送入人眼,使观测者能看到原来看不到的暗弱物体。
1608年荷兰人汉斯·利伯希发明了第一部望远镜。
1609年意大利佛罗伦萨人伽利略·伽利雷发明了40倍双镜望远镜,这是第一部投入科学应用的实用望远镜。
卡塞格林望远镜的设计是以伯恩哈德·施密特的摄星仪基础,一如施密特摄星仪使用球面镜做主镜,并以修正板来改正球面像差;承袭卡塞格林的设计,以凸面镜做次镜,将光线反射穿过主镜中心的孔洞,汇聚在主镜后方的焦平面上。
有些设计会在焦平面的附近增加其他的光学元件,例如平场镜。
关键词:望远镜卡塞格林望远镜AbstractThe use of light refraction through the lens or concave mirror is reflecting light so that convergence of imaging into the hole and then through a magnifying eyepiece and be seen. Also known as "Trinidad mirror." The first role is to telescope magnification of distant objects inclination, the angular distance the human eye can see smaller details. The second role is to telescope the objective lens to collect than the pupil diameter (up to 8 mm) thick much beam into the eye, the observer can see the original can not see the fainter objects. In 1608 the Dutch Hans • Li Boxi invented the first telescope. Galileo 1609 Florence, Italy, were 40 times • Galileo Leifa Ming dual mirror telescope, which is the first practical application of science into the telescope.Cassegrain tel escope design is based on Bernhard Schmidt camera • Star instrument basis, as the star meter Schmidt camera lens using a spherical mirror shots, and to amend the board to correct the spherical aberration; inherited the Cassegrain designed to do the second convex mirror, the reflection of light through the holes in the center of the primary mirror, gathered in the focal plane behind the primary mirror. Some designs will increase in the focal plane near the other optical components, such as flat-field lens.Keywords: telescope, Cassegrain telescope1绪论由两块反射镜组成的一种反射望远镜,1672年为卡塞格林所发明。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Zemax光学设计:一个带校正器的卡塞格林望远镜的设计实例
引言:
折反射系统相比于折射系统的主要优点有:
1.由于光路折叠而更紧凑;
2.可以做到很大口径;
3.可以很好校正色差,因为大多数的光焦度在反射镜而不是在透镜上。
4.可以做到从紫外到红外非常宽的波段。
5.反射镜与透镜的佩兹瓦尔曲面的曲率相反,可以实现较平的视场。
在两反射镜系统中,次镜构成的孔径的中心拦光(Central Obscuration),这不仅会造成能量的损失,也会使MTF的低频至中频部分随着中心拦光面积的增大而显著减小。
同时,因为两反射镜系统像的位置很接近于主镜位置,所以几乎所有的主镜都需要挖一个洞。
这个洞的大小限制了最大的像面尺寸,而且洞的大小必须远小于主镜的口径。
例如,通常中心拦光或洞的大小是主镜直径的30%,即线性拦光比为0.3,有效口径减小了0.09(0.32),此时MTF的中低频端变化不明显。
一般拦光比不要大于0.3。
典型的牛顿望远物镜仅用一个抛物凹面作为主反射镜,它可以形成一个直接用眼睛看的像。
在此基础上,添加一个凸双曲面的次反射镜,就成了卡塞格林望远镜(Cassegrain Telescope)。
由于主镜和次镜都是圆锥曲面,每个面上都没有球差,但是每个面都有彗差和像散,而这限制了可用的视场角。
另外,由于两个反射镜的半径不一样,还存在场曲。
设计仿真:
.
1.建立一个简单的卡塞格林望远镜系统
.
首先输入系统特性参数,如下:
在系统通用对话框中设置孔径。
在孔径类型中选择“Entrance Pupil Diameter”,并根据设计要求输入“3800”;
在视场设定对话框中设置3个视场,要选择“Angle”,如下图:
在波长设定对话框中,设定0.365um、0.5876um和0.850um共3个波长,如下图:
查看LDE:
2D Layout:
查看点列图:
查看Ray Fan:
从点列图和Ray Fan可以看出,这个系统有明显的彗差和像散。
.
2.在卡塞格林望远镜中加入像面校正器
.
临近焦面的双片式透镜可以校正彗差和像散。
但是双片式透镜需要引入一些球差,而这些球差可以用次反射镜的非球面或者沿轴平移来校正。
LDE如下:
查看2D Layout:
点列图:
Ray Fan:
从点列图和Ray Fan可以看出,彗差和像散得到明显地改善。