嵌入式编程第三篇:MDK中链接脚本解析
嵌入式系统C语言编程基础PPT课件
精选ppt
小测验?
精选ppt
Quiz 1
• 所有嵌入式系统的主流程最后都进入一个 死循环,怎样用C语言实现一个死循环?
精选ppt
Quiz 2
• while(){….}和do{….}while()有什么区别?
精选ppt
Quiz 3
• 用变量a给出下列定义:
a) 一个整型数 b) 一个指向整型数的指针 c) 一个有10个整型数的的数组 d) 一个有10个指针的数组,该指针是指向一个整型
精选ppt
Quiz 10
• 请评论下面一段程序代码: void test() { char string[10]; char *str = “0123456789”; strcpy(string,str); }
精选ppt
Quiz 11
• 请评论下面一段程序代码: void GetMemory(char *p){ p = (char *)malloc(0x20); } void Test(void){ char *str = NULL; GetMemory(str); strcpy(str,”Hello World!”); printf(str); }
数的
精选ppt
Quiz 4
• 关键字static的作用是什么?
精选ppt
Quiz 5
• 关键字const的作用是什么?
精选ppt
Quiz 6
• 定义一个标准宏MIN ,这个宏输入两个参 数并返回较小的一个。
精选ppt
Quiz 7
• 嵌入式系统中经常要对变量或寄存器进行 位操作。给定一个int型变量a,写两段代码, 第一个将a的bit 3置为1,第二个将a的bit 3 置为0。以上两个操作中,要保持其它位不 变。
试图搞懂MDK程序下载到flash(三)--MDK配置选项Linker、Target、Debug的理解分析

试图搞懂MDK程序下载到flash(三)--MDK配置选项Linker、Target、Debug的理解分析在写这一节时,我还是想再重复一下自己写这文章的目的,我的目的就是为了实现将MDK 编写的裸机程序可不可以脱机运行,也就是不用调试的方法,因为调试的话程序默认是在SRAM中运行的,掉电丢失。
而要脱机运行,就得将程序编译后的文件下载到flash中,最好能是nand flash。
如果要下载到nand flash,那么就要编译生成一个bin文件,而不是用axf文件。
那么剩下的问题就是,怎么生成一个完整、正确的bin文件?所以我现在就需要看能否通过编写一个分散加载文件,解决bin文件的地址问题。
生成了bin文件,那么我就可以利用韦东山的方法,利用supervivi的v选项,配合DNW将程序下载到nand flash中并运行!现在咱们就分析一下MDK配置选项,首先解释一下MDK中三种linker之间的区别:1、采用Target对话框中的RAM和ROM地址。
采用此方式,需在Linker选项卡中勾选Use Memory Layout from Target Dialog选项(选中这一项实际上是默认在Target中对Flash和RAM的地址配置,编译链接时会产生一个默认的脚本文件),并且在Target中设置好RAM、ROM地址,图2所示。
MDK会根据Target选项中设定的RAM和ROM地址自动加载生成一个加载文件。
最后链接器会根据此文件中的信息对目标文件进行链接,生成axf镜像文件。
至于ROM和RAM是片内还是片外、容量(Size)多大,就需要根据芯片和开发板来决定了。
2、直接通过Linker选项卡中的R/O Base和R/W Base来设定链接信息。
链接器最后可根据此处指定的地址信息进行链接,链接的文件应该是顺序存放了,最多RO和RW分开。
此时需要注意的是应将Use Memory Layout from Target Diaglog前的勾去掉,且保证Scatter File一栏中未包含分散加载文件,并且要在Misc controls中设定镜像文件的入口点,如:--first 2440init.o(Init) 对于这个括号内的填写依据,我暂时还不懂。
JLINK及KEIL MDK使用手册
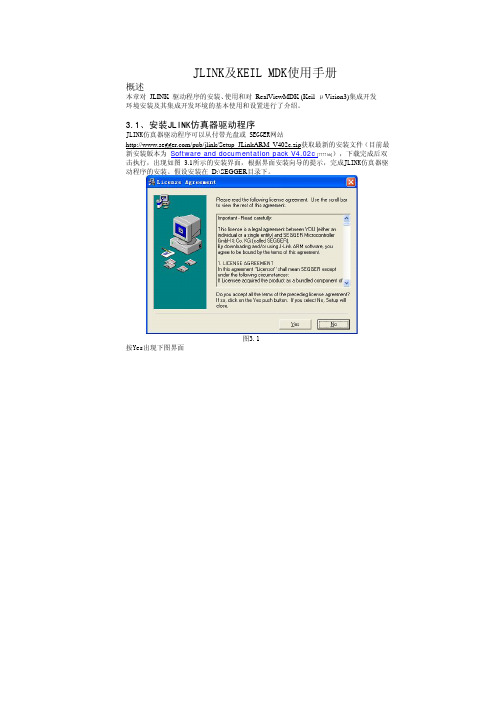
JLINK及KEIL MDK使用手册概述本章对 JLINK 驱动程序的安装、使用和对 RealViewMDK (Keil μVision3)集成开发环境安装及其集成开发环境的基本使用和设置进行了介绍。
3.1、安装JLINK仿真器驱动程序JLINK仿真器驱动程序可以从付带光盘或 SEGGER网站/pub/jlink/Setup_JLinkARM_V402c.zip获取最新的安装文件(目前最新安装版本为 Software and documentation pack V4.02c [7177 kb]),下载完成后双击执行,出现如图 3.1所示的安装界面,根据界面安装向导的提示,完成JLINK仿真器驱动程序的安装。
假设安装在 D:\SEGGER目录下。
图3.1按Yes出现下图界面图3.2 按Next继续下一步操作图3.3选择安装目录后按Next继续下一步图3.4如果你还在以前装了IAR的集成开发环境将出现下面图3.5的提示,提示你选择更新IAR 下的JLINK仿真器的动态链接库文件,一般选上后按OK完成JLINK仿真器的安装。
图3.53.2、如何使用JLINK仿真器软件3.2.1、使用J-FLASH ARM 烧写程序到芯片FLASH运行J-FLASHARM 出现图3.6图3.6 进行烧写前的必要设置如:图3.7图3.7选择MINI-STM32开发板的CPU型号,选择完成后按确定退出设置。
图3.8设置完成后左边显示烧写信息图3.9连接目标板,连上后会有提示信息,见下边的状态拦。
图3.10连接成功后如图3.11图3.11接着File->open打开烧录文件,如图3.12图3.12加载完成后选择Target->Auto或快捷键F7进行自动烧录。
图3.13烧写状态,图3.14图3.14 烧写成功,图3.15图3.15关于J-FLASH ARM更详细的操作请参阅JLINK的用户手册。
3.2.2、使用J-Link command设置和查看相关调试信息J-Link command包含了所有设置和查看相关调试信息的命令,J-Link command基于命令行输入方式。
MDK(uVsion3)问题总结及解决方法

MDK(uVsion3)问题总结及解决方法使用MDK已经有快半年的时间了,开始一直使用试用版(不到半个月就上手了),后来研发部门购买了三套MDK工具进行产品研发,以下是我在使用过程中出现过的一些问题,现在总结出来供大家一起分享下吧,呵呵,希望对大家有用啦。
问题1:MDK工具的CARM编译器?我原来对CARM编译器比较熟悉,想用CARM编译器编译工程,但是却弹出一个不能执行“cc”的错误,到KEIL网站查下才知道原因:由于CARM编译器是比较老的编译器,并且KEIL公司两年前已经停止了对CARM编译器的维护与升级,所以目前KEIL公司已经没有把CARM编译器集成到MDK开发工具开发工具里面来。
于是我就改用RealView编译工具,却发现RealView 编译工具确实很好用,编译效率很高,不愧为业内最优秀的编译器啊,呵呵,所以建议大家都用RealView编译器吧。
不过现在KEIL网站也可以下载CARM编译器,版本为2.54,具体情况见/support/docs/3267.htm。
4d.y5q4O4_$R问题2:使用MDK工具将程序下载到RAM里面调试?MDK支持将代码下载到RAM中进行调试。
之前我以为只能通过编写脚本文件的方法,后来看帮助文档才知道有一个更为快捷的方法,点下鼠标就可以了。
可以有两种方法实现RAM 下载的功能。
电子论坛电子论坛,电子设计论坛,电子开发论坛+I,y*o*t i2u,Q%f方法一电子开发论坛)e T2M)p0\我们只需要简单的设置就可以实现此功能。
具体方法大家可在MDK帮助文档里看到:MDK帮助文档(Help)->RealView编译工具简介->嵌入式程序->指定存储域。
在这一章节说明了将代码拷贝到RAM中执行的方法。
也就是只要点下鼠标就可以实现的方法。
方法二"y:U2Z0z7T C9e3f.z我们可以写脚本文件实现这一功能,脚本文件的写法和ADS或者Embest IDE大致相同,只是有些格式需要稍微修改,具体写法大家可以参阅MDK里面的PDF帮助文档,文档路进为:打开MDK工具->workspace->books->双击RV Linker/Utilities打开PDF文档->第五章Using Scatter-loading Description Files。
嵌入式代码解析
嵌入式代码解析1. 什么是嵌入式代码嵌入式代码是指嵌入在硬件系统中的特定代码,用于控制和操作硬件设备。
嵌入式系统是指集成有特定功能的计算机系统,由硬件和软件部分组成。
嵌入式代码是在嵌入式系统中运行的软件部分。
2. 嵌入式代码的特点嵌入式代码具有以下几个特点:•资源受限:嵌入式系统通常具有有限的资源,包括处理器性能、存储空间和功耗。
因此,嵌入式代码需要高效地利用这些有限的资源。
•实时性要求:嵌入式系统通常用于控制和操作实时性要求较高的设备,如航空航天器、医疗设备等。
因此,嵌入式代码需要能够在硬实时约束下运行,并及时响应外部事件。
•稳定性和可靠性:嵌入式系统通常需要长时间运行,并具有高可靠性要求。
因此,嵌入式代码需要具有稳定性和可靠性,以确保系统的正常运行。
3. 嵌入式代码的开发过程嵌入式代码的开发过程通常包括以下几个阶段:3.1 需求分析在需求分析阶段,开发人员与用户和系统架构师合作,明确系统的功能和性能要求。
根据需求分析结果,确定嵌入式代码的功能和接口。
3.2 系统设计在系统设计阶段,开发人员根据需求分析结果,设计系统的整体架构和模块结构。
确定嵌入式代码的模块划分和模块间的接口。
3.3 代码编写在代码编写阶段,开发人员根据系统设计,编写具体的嵌入式代码。
代码编写需要遵循特定的编程规范和标准,以保证代码的可读性和可维护性。
3.4 调试和测试在调试和测试阶段,开发人员对嵌入式代码进行调试和测试,以验证代码的正确性和稳定性。
调试和测试过程中可能需要使用模拟器或调试工具,以辅助调试。
3.5 部署和集成在部署和集成阶段,开发人员将嵌入式代码部署到目标硬件平台上,并与硬件系统进行集成测试。
集成测试过程中需要验证嵌入式代码与硬件设备的正确交互。
4. 嵌入式代码的常见技术和工具嵌入式代码开发中常用的技术和工具包括以下几个方面:4.1 编程语言嵌入式代码可以使用多种编程语言进行开发。
常用的编程语言包括C语言、C++语言和Python语言。
keil嵌入式开发环境的基本概念
文章标题:深度解析Keil嵌入式开发环境的基本概念1. 介绍keil嵌入式开发环境Keil嵌入式开发环境是一种专门用于嵌入式系统开发的集成开发环境(IDE)。
它包括了一整套用于编写、编译、调试嵌入式程序的工具,以及一系列支持设备的驱动程序。
2. 深入理解Keil的基本概念2.1. 硬件描述语言(HDL)的应用Keil开发环境支持硬件描述语言(HDL),使得开发人员能够更加灵活地对硬件进行描述和设计。
这在嵌入式系统的开发中扮演着重要的角色,能够大大提高开发效率和系统性能。
2.2. 集成了多种编程语言Keil集成了多种编程语言,包括C语言、汇编语言等,使得开发人员能够根据实际需求来选择合适的开发语言,从而更好地完成嵌入式系统的开发。
2.3. 调试工具的全面支持Keil还提供了强大的调试工具,能够帮助开发人员快速定位并解决程序中的bug,保证程序的稳定性和可靠性。
3. Keil的应用示例3.1. 具体案例分析以一个具体的嵌入式系统开发项目为例,介绍Keil在开发过程中的应用,并重点分析其在硬件描述、编程语言选择和调试工具支持等方面的作用和价值。
3.2. 成功经验共享通过成功案例的共享,总结出Keil开发环境在嵌入式系统开发中的优势和特点,让读者对其有一个更加清晰的认识。
4. 个人观点和理解4.1. Keil在嵌入式开发中的重要性个人认为,Keil在嵌入式系统开发中扮演着至关重要的角色,它的全面支持和强大功能能够大大提高开发效率和软件质量。
4.2. 对Keil的期待作为一名嵌入式系统开发者,我期待Keil能够不断地更新和优化,以适应不断变化的市场需求和技术发展,为嵌入式开发者提供更加便捷和高效的开发环境。
5. 总结本文深入解析了Keil嵌入式开发环境的基本概念,包括其对硬件描述语言的支持、多种编程语言的集成和强大的调试工具等方面。
通过实际案例和个人观点的共享,读者能够更全面地了解Keil在嵌入式系统开发中的价值和作用,同时也能够对其未来发展有一定的展望。
项目驱动-深入理解嵌入式C

for语句
用于循环执行一段代码一定次数 或直到条件不满足。
函数
函数定义
定义一个函数需要指定函数名、返回 类型和参数列表。
函数调用
通过函数名和参数列表来调用函数。
函数参数传递
函数参数可以通过值传递或指针传递, 传递方式会影响函数的执行效果。
函数返回值
函数执行完毕后需要返回一个值,返 回值的类型必须与函数声明中的返回 类型一致。
项目驱动-深入理解嵌入式C
contents
目录
• 嵌入式C语言概述 • 嵌入式C语言基础 • 嵌入式C语言进阶 • 项目驱动实践 • 总结与展望
01 嵌入式C语言概述
嵌入式C语言简介
嵌入式C语言是一种针对嵌入式系统的编程语言,主要用于开发嵌入式系统的软件。
嵌入式系统是一种专用的计算机系统,通常被嵌入到其他设备中,以实现特定的功 能。
感谢您的观看
硬件访问
嵌入式C语言可以直接访问硬件,实现对硬件的控制和操作。
嵌入式C语言的应用领域
工业控制 智能家居 医疗设备 物联网
嵌入式C语言广泛应用于工业控制领域,如自动化生产线、智能 仪表等。
嵌入式C语言在智能家居领域也有广泛应用,如智能门锁、智能 照明等。
嵌入式C语言还应用于医疗设备领域,如监护仪、医疗诊断设备 等。
嵌入式C语言学习的收获与体会
掌握嵌入式C语言的核心概念和语法规则
通过学习嵌入式C语言,我深入理解了C语言的内存管理、指针、位操作等核心概念,掌 握了C语言的语法规则和编程技巧。
提升硬件编程能力
嵌入式C语言主要用于硬件编程,通过学习和实践,我提高了对硬件设备的控制能力,掌 握了底层驱动开发、嵌入式系统移植等技能。
嵌入式C语言具有高效、紧凑和可移植性强的特点,非常适合在资源有限的嵌入式系 统中使用。
试图搞懂MDK程序下载到flash(三)--MDK配置选项Linker、Target、Debug的理解分析
试图搞懂MDK程序下载到flash(三)--MDK配置选项Linker、Target、Debug的理解分析在写这一节时,我还是想再重复一下自己写这文章的目的,我的目的就是为了实现将MDK 编写的裸机程序可不可以脱机运行,也就是不用调试的方法,因为调试的话程序默认是在SRAM中运行的,掉电丢失。
而要脱机运行,就得将程序编译后的文件下载到flash中,最好能是nand flash。
如果要下载到nand flash,那么就要编译生成一个bin文件,而不是用axf文件。
那么剩下的问题就是,怎么生成一个完整、正确的bin文件?所以我现在就需要看能否通过编写一个分散加载文件,解决bin文件的地址问题。
生成了bin文件,那么我就可以利用韦东山的方法,利用supervivi的v选项,配合DNW将程序下载到nand flash中并运行!现在咱们就分析一下MDK配置选项,首先解释一下MDK中三种linker之间的区别:1、采用Target对话框中的RAM和ROM地址。
采用此方式,需在Linker选项卡中勾选Use Memory Layout from Target Dialog选项(选中这一项实际上是默认在Target中对Flash和RAM的地址配置,编译链接时会产生一个默认的脚本文件),并且在Target中设置好RAM、ROM地址,图2所示。
MDK会根据Target选项中设定的RAM和ROM地址自动加载生成一个加载文件。
最后链接器会根据此文件中的信息对目标文件进行链接,生成axf镜像文件。
至于ROM和RAM是片内还是片外、容量(Size)多大,就需要根据芯片和开发板来决定了。
2、直接通过Linker选项卡中的R/O Base和R/W Base来设定链接信息。
链接器最后可根据此处指定的地址信息进行链接,链接的文件应该是顺序存放了,最多RO和RW分开。
此时需要注意的是应将Use Memory Layout from Target Diaglog前的勾去掉,且保证Scatter File一栏中未包含分散加载文件,并且要在Misc controls中设定镜像文件的入口点,如:--first 2440init.o(Init) 对于这个括号内的填写依据,我暂时还不懂。
Realview MDK中链接脚本的详细解析
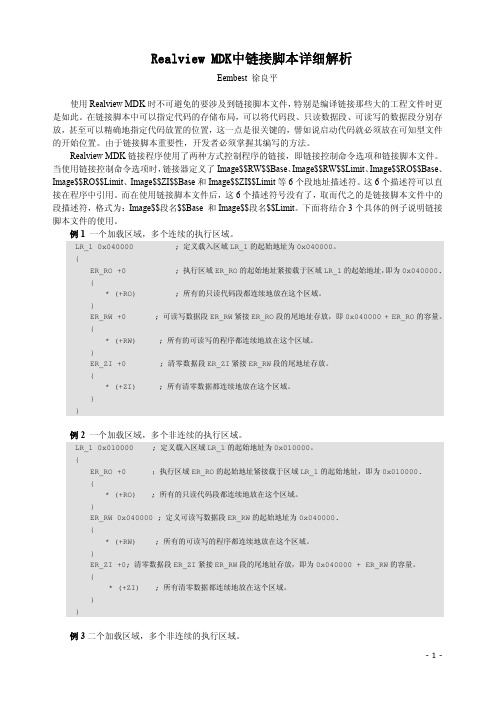
例 2 一个加载区域,多个非连续的执行区域。
LR_1 0x010000 { ER_RO +0 { * (+RO) } ER_RW 0x040000 ; 定义可读写数据段 ER_RW 的起始地址为 0x040000. { * (+RW) } ER_ZI +0; 清零数据段 ER_ZI 紧接 ER_RW 段的尾地址存放,即为 0x040000 + ER_RW 的容量。 { * (+ZI) } } ; 所有清零数据都连续地放在这个区域。 ; 所有的可读写的程序都连续地放在这个区域。 ; 所有的只读代码段都连续地放在这个区域。 ;执行区域 ER_RO 的起始地址紧接载于区域 LR_1 的起始地址,即为 0x010000. ; 定义载入区域 LR_1 的起始地址为 0x010000。
例 3 二个加载区域,多个非连续的执行区域。
-1-
LR_1 0x010000 { ER_RO +0 { * (+RO) } } LR_2 0x040000 { ER_RW +0 { * (+RW) } ER_ZI +0 { * (+ZI) } }
; 载入区域 LR_1 的起始地址为 0x010000。 ; ER_RO 段的起始地址为 0x010000.
Realview MDK中链接脚本详细解析
Eembest 徐良平 使用 Realview MDK 时不可避免的要涉及到链接脚本文件, 特别是编译链接那些大的工程文件时更 是如此。在链接脚本中可以指定代码的存储布局,可以将代码段、只读数据段、可读写的数据段分别存 放,甚至可以精确地指定代码放置的位置,这一点是很关键的,譬如说启动代码就必须放在可知型文件 的开始位置。由于链接脚本重要性,开发者必须掌握其编写的方法。 Realview MDK 链接程序使用了两种方式控制程序的链接,即链接控制命令选项和链接脚本文件。 当使用链接控制命令选项时, 链接器定义了 Image$$RW$$Base、 Image$$RW$$Limit、 Image$$RO$$Base、 Image$$RO$$Limit、Image$$ZI$$Base 和 Image$$ZI$$Limit 等 6 个段地址描述符。这 6 个描述符可以直 接在程序中引用。而在使用链接脚本文件后,这 6 个描述符号没有了,取而代之的是链接脚本文件中的 段描述符,格式为:Image$$段名$$Base 和 Image$$段名$$Limit。下面将结合 3 个具体的例子说明链接 脚本文件的使用。 例 1 一个加载区域,多个连续的执行区域。
keil模块化编程详解

keil模块化编程详解英文回答:Modular programming is a software development approach that involves breaking down a program into smaller, independent modules. Each module focuses on a specific task or functionality, and can be developed and tested separately before being integrated into the larger program.One of the key benefits of modular programming is code reusability. By creating modules that are self-contained and independent, they can be easily reused in different projects. This saves time and effort in development, as well as promotes code consistency and maintainability.In the context of Keil, a popular integrated development environment (IDE) for embedded systems, modular programming can be implemented using the concept of software components. A software component is a self-contained unit of code that encapsulates a specificfunctionality or feature. It can be developed as a separate project or module, and can then be integrated into the main project using Keil's component management system.Using Keil's component management system, developers can easily add, remove, and update software components within their projects. This allows for easy integration and reusability of code, as well as efficient collaboration between team members working on different modules.For example, let's say I am developing an embedded system that requires both a Bluetooth module and a sensor module. Instead of writing all the code for these modules within the main project, I can create separate software components for each module. These components can be developed and tested independently, and then integratedinto the main project using Keil's component management system.By modularizing the code in this way, I can easily reuse the Bluetooth module and the sensor module in future projects without having to rewrite the code from scratch.This not only saves time and effort, but also ensures that the code is consistent and reliable across different projects.中文回答:模块化编程是一种软件开发方法,它将程序分解为较小、独立的模块。
在KEIL中使用MDK

在KEIL中使用MDK最近在学习ARM公司新推出的cortex-m4系列的ARM芯片,选用的是飞思卡尔的K60系列,它采用的就是cortex-m4核心。
cortex-m4比cortex-m3多了个dsp处理单元。
增加了dsp单元的优势是显而易见的:在涉及到大量的数学运算时可以采用dsp来处理,大大节约了运算时间和代码量。
(K60的浮点运算单元是个可选的部件,由于我拿到的K60还不支持FPU,所以下面涉及到的浮点调试只能用仿真的方式进行)最新的KEIL MDK-ARM开发环境已经增加了对cortex-m4的支持(我是用的是MDK-ARM Standard Version 4.20),包括仿真支持,也就是说即使你没有拿到开发板也可以来学习cortex-m4. 在器件选择中,这个版本已经增加了飞思卡尔K60系列,在新建工程时可以选择(我选择了Freescale Semiconductor--MK60X256VMD100这个器件)。
下面写一下我自己的学习过程。
一、不使用K60的浮点运算单元。
在默认情况下,K60的浮点单元并没有被打开,一切浮点运算还是软件浮点。
①打开Keil uVision4,新建工程,选择保存路径,选择器件,找到Freescale Semiconductor,展开,在最下面选择MK60X256VMD100。
程序问你是否添加这个系列的启动代码到工程中,选择是(如果没有出现这个选项,可以自己在Keil的安装目录里找,自己添加,其路径为C:\Keil\ARM\Startup\Freescale\K60)。
这时一个新的工程就建好了,默认增加了startup_MK60N512MD100.s这个启动文件。
②测试浮点运算。
我们可以新建一个C文件,用来测试浮点运算使用的是软浮点还是硬浮点。
新建c文件里的代码可以如下:1.int main(void)2.3.{4.float a=3.14259265357,b=12.98635463738,result;5.result=a*b*b;6.return result;7.8.}9.10.extern void SystemInit(void)11.{12.int a=1;13.while(a) a--;14.}其中void SystemInit(void)这个函数是为了满足启动文件startup_MK60N512MD100.s中对SystemInit的调用,本来是对器件的初始化,这里只是做测试用,没有实际内容。
mdk及ewarm使用简介

第1节Keil MDK介绍File Save ROMSTM32微处理器基于ARM核,所以很多基于ARM嵌入式开发环境都可用于STM32开发平台。
开发工具都可用于STM32开发。
选择合适的开发环境可以加快开发进度,节省开发成本。
本章将先对STM32常用的开发工具Keil MDK和IAR EWARM进行简单介绍,然后结合STM32_SK仿真评估板和STM32F103C的开发板讲解STM32片上资源使用,最后给出一个基于STM32的数据采集器的应用实例。
5.1 Keil MDK介绍Keil是德国知名软件公司Keil(现已并入ARM 公司)开发的微控制器软件开发平台,是目前ARM内核单片机开发的主流工具。
Keil提供了包括C编译器、宏汇编、连接器、库管理和一个功能强大的仿真调试器在内的完整开发方案,通过一个集成开发环境(uVision)将这些功能组合在一起。
uVision当前最高版本是uVision3,它的界面和常用的微软VC++的界面相似,界面友好,易学易用,在调试程序,软件仿真方面也有很强大的功能。
因此很多开发ARM应用的工程师,都对它十分喜欢。
5.1.1 开发过程及集成开发环境简介1. Keil的软件开发周期使用Keil来开发嵌入式软件,开发周期和其他的平台软件开发周期是差不多的,大致有以下几个步骤:1. 创建一个工程,选择一块目标芯片,并且做一些必要的工程配置。
2. 编写C或者汇编源文件。
3. 编译应用程序。
4. 修改源程序中的错误。
5. 联机调试。
下面这种结构图完整描述了Keil开发软件的整个过程。
2. uVision3 集成开发环境uVision3 IDE是一款集编辑,编译和项目管理于一身的基于窗口的软件开发环境。
uVision3集成了C语言编译器,宏编译,链接/定位,以及HEX文件产生器。
uVision3具有如下特性:ν功能齐全的源代码编辑器,用于配置开发工具的设备库,ν用于创建工程和维护工程的项目管理器,νν所有的工具配置都采用对话框进行,集成了源码级的仿真调试器,包括高速CPU和外设模拟器,ν用于往Flashν ROM下载应用程序的Flash编程工具,ν完备的开发工具帮助文档,设备数据表和用户使用向导。
keil工程文件解析

keil工程文件解析
Keil工程文件是用于管理和配置工程项目的文件集合,主要在嵌入式系统开发中使用。
一个Keil工程通常包含多个文件,这些文件可以分为两类:工
程文件和源码编译文件。
工程文件主要包括.uvprojx、.uvoptx、.uvguix及.crf、.dep等。
具体来说:
1. .uvprojx文件:这是我们平时双击打开的工程文件,它记录了整个工程的结构,如芯片类型、工程包含了哪些源文件等内容。
2. .uvoptx文件:这个文件记录了工程的配置选项,如下载器的类型、变量跟踪配置、断点位置以及当前已打开的文件等等。
3. .uvguix文件:这个文件记录了Keil工程的GUI布局,如代码编辑区窗
口的大小、编译输出提示窗口的位置等等。
此外,一个Keil工程中还包括编译后的程序文件,如hex和bin文件等。
hex文件是一种使用十六进制符号表示的代码记录,记录了代码应该存储到FLASH的哪个地址和二进制代码数据。
bin文件则是可执行文件,记录了程序的二进制代码。
这些文件都有其特定的用途和重要性,共同构成了一个完整的Keil工程。
嵌入式链接脚本(LinkScript)介绍

嵌入式链接脚本(LinkScript)介绍1. 概论每一个链接过程都由链接脚本(linkerscript, 一般以lds作为文件的后缀名)控制. 链接脚本主要用于规定如何把输入文件内的section放入输出文件内, 并控制输出文件内各部分在程序地址空间内的布局. 但你也可以用连接命令做一些其他事情.连接器有个默认的内置连接脚本, 可用ld--verbose查看. 连接选项-r和-N可以影响默认的连接脚本(如何影响).-T选项用以指定自己的链接脚本, 它将代替默认的连接脚本。
你也可以使用<暗含的连接脚本>以增加自定义的链接命令.以下没有特殊说明,连接器指的是静态连接器.. 基本概念链接器把一个或多个输入文件合成一个输出文件.输入文件: 目标文件或链接脚本文件.输出文件: 目标文件或可执行文件.有时把输入文件内的section称为输入section(inputsection), 把输出文件内的section称为输出section(outputsectin).目标文件的每个section至少包含两个信息: 名字和大小. 大部分section还包含与它相关联的一块数据, 称为section contents(section 内容). 一个section可被标记为“loadable(可加载的)”或“allocatable(可分配的)”.loadable section: 在输出文件运行时, 相应的section内容将被载入进程地址空间中.allocatable section: 内容为空的section可被标记为“可分配的”. 在输出文件运行时, 在进程地址空间中空出大小同section指定大小的部分. 某些情况下, 这块内存必须被置零.如果一个section不是“可加载的”或“可分配的”, 那么该section通常包含了调试信息. 可用objdump -h命令查看相关信息.每个“可加载的”或“可分配的”输出section通常包含两个地址: VMA(virtual memory address虚拟内存地址或程序地址空间地址)和LMA(load memory address加载内存地址或进程地址空间地址). 通常VMA和LMA是相同的.可这样来理解VMA和LMA, 假设:(1) .data section对应的VMA地址是0x08050000, 该section 内包含了3个32位全局变量, i、j和k, 分别为1,2,3.(2) .text section内包含由"printf( "j=%d ", j );"程序片段产生的代码.连接时指定.datasection的VMA为0x08050000,产生的printf 指令是将地址为0x08050004处的4字节内容作为一个整数打印出来。
欢迎阅读《MDK的编译过程及文件类型全解》文档

欢迎阅读《MDK的编译过程及文件类型全解》文档本章参考资料:MDK的帮助手册《ARM Development T ools》,点击MDK界面的“help->uVision Help”菜单可打开该文件。
关于ELF文件格式,参考配套资料里的《ELF文件格式》文件。
在本章中讲解了非常多的文件类型,学习时请跟着教程的节奏,打开实际工程中的文件来了解。
相信您已经非常熟练地使用MDK创建应用程序了,平时使用MDK编写源代码,然后编译生成机器码,再把机器码下载到STM32芯片上运行,但是这个编译、下载的过程MDK究竟做了什么工作?它编译后生成的各种文件又有什么作用?本章节将对这些过程进行讲解,了解编译及下载过程有助于理解芯片的工作原理,这些知识对制作IAP(bootloader)以及读写控制器内部FLASH的应用时非常重要。
编译过程¶编译过程简介¶首先我们简单了解下MDK的编译过程,它与其它编译器的工作过程是类似的,该过程见图 1-1。
图 1-1 MDK编译过程编译过程生成的不同文件将在后面的小节详细说明,此处先抓住主要流程来理解。
1.编译,MDK软件使用的编译器是armcc和armasm,它们根据每个c/c++和汇编源文件编译成对应的以“.o”为后缀名的对象文件(Object Code,也称目标文件),其内容主要是从源文件编译得到的机器码,包含了代码、数据以及调试使用的信息;2.链接,链接器armlink把各个.o文件及库文件链接成一个映像文件“.axf”或“.elf”;3.格式转换,一般来说Windows或Linux系统使用链接器直接生成可执行映像文件elf后,内核根据该文件的信息加载后,就可以运行程序了,但在单片机平台上,需要把该文件的内容加载到芯片上,所以还需要对链接器生成的elf映像文件利用格式转换器fromelf转换成“.bin”或“.hex”文件,交给下载器下载到芯片的FLASH或ROM 中。
keil的编译过程
keil的编译过程Keil是一款由德国公司Keil GmbH开发的集成开发环境(IDE),主要针对嵌入式系统开发。
它基于ARM、C51、C251和C166处理器架构。
Keil的编译过程主要包括以下几个步骤:1. 文件处理:首先,Keil会读取项目文件(.uvp)中的源文件(.c或.cpp),并对它们进行预处理。
预处理包括替换宏、声明头文件和处理条件编译等。
2. 编译预处理:接下来,Keil使用ARM编译器对预处理后的源文件进行编译。
编译过程中,编译器会将源代码转换为目标代码(.o文件)。
此外,编译器还会处理汇编代码、链接符号地址以及生成重定位信息等。
3. 汇编处理:如果项目中包含汇编文件(.asm),Keil会使用ARM 汇编器对汇编文件进行编译。
编译完成后,汇编器将生成汇编代码(.o 文件)。
4. 链接处理:在编译和汇编完成后,Keil会使用ARM链接器对目标文件进行链接。
链接过程中,链接器会合并多个目标文件,消除重定位,生成最终的可执行文件(.elf或.axf)。
此外,链接器还会处理库文件(.lib)和启动代码(.res)等。
5. 生成输出文件:最后,Keil会生成输出文件,如Makefile、HTML 文档、调试信息等。
这些输出文件可以帮助开发者更好地理解和调试项目。
6. 调试:Keil还提供了丰富的调试工具,如MDK-ARM Debugger、Simulator等。
开发者可以在调试过程中查看代码执行状态、实时数据和硬件资源等信息,以便找出潜在问题并加以解决。
总之,Keil的编译过程涵盖了文件处理、编译预处理、汇编处理、链接处理、生成输出文件和调试等多个环节。
通过这些步骤,Keil为嵌入式系统开发者提供了一个高效、便捷的开发环境。
嵌入式C语言编码规范精讲课件

一、引言
二、规范
1、文件内部构成
2、命名规范
3、标识符和常量
4、类型和类型转换
5、初始化、声明和定义
6、控制语句和表达式
7、函数
8、指针和数组
9、结构与联合
10、预处理指令
一、引言
嵌入式系统在各行各业都得到了广泛应用,C 语言的使用也
越来越体现出广泛性,因此嵌入式软件的安全可靠性变得尤为重
typedef struct {
INT8U ucSize;
INT8U aucReceiverID[RECEIVERID_SIZE];
INT8U *pucReceiverBuff;
}SDARS_DispReceiverID_st,*pSDARS_DispRec
eiverID_st;
pSDARS_DispReceiverID_st apstDispReceiverI
{
INT16U i; /* 定义了一个具有内部作用域的变量*/
i = 3; /* NG :外部作用域变量被隐藏,容易引起代码混乱 */
}
规范3.3 静态变量和全局变量的标识符不能重名(不同文件)。
3 标识符和常量
[例][file1.c]
static INT8U nucVar1; /* NG:多个 file 中进行了定义 */
7
unsigned[int]
u
unsigned[int] uiVariable;
8
double
d
double dVariable;
9
float
f
float fVariable;
10
pointer
p
void *pvVariable;
keil_mdk_constraint使用约束_解释说明

keil mdk constraint使用约束解释说明1. 引言1.1 概述本文将介绍Keil MDK的Constraint使用约束,并对其进行解释和说明。
Constraint是一种用于定义和管理资源约束的技术,可以帮助开发人员更好地控制代码质量、性能以及资源利用。
通过灵活配置不同的约束条件,我们可以确保系统在运行过程中满足特定要求,并提供支持多平台开发和移植性。
本文将从基本概念、语法规则以及使用示例等方面详细介绍Keil MDK Constraint的使用。
1.2 文章结构本文将分为五个主要部分进行讨论。
首先,在"引言"部分我们将给出对整篇文章内容的一个概述,在接下来的各个章节中逐步深入介绍Keil MDK Constraint 的相关内容。
在第二部分,我们会先介绍Constraint的基本概念,包括其定义和作用等方面;其次,我们将详细解析Constraint使用时需要遵循的语法规则。
在第三部分中,我们将探讨Constraint的作用与意义,包括提高代码质量与性能、确保资源合理利用以及支持多平台开发和移植性等方面。
接着,在第四部分,我们会给出在使用Constraint时需要注意的事项,包括规划资源需求与约束关系、编写正确且可维护的Constraint文件以及调试和验证Constraint文件的方法和技巧。
最后,在第五部分中,我们将总结Keil MDK Constraint的重要性和实际应用价值,并展望Constraint技术的未来发展趋势及挑战。
1.3 目的本文的目的在于全面介绍Keil MDK Constraint使用约束,并对其进行详细说明与解释。
通过阅读本文,读者将能够了解到如何正确使用Constraint技术来提高代码质量与性能,确保资源合理利用并支持多平台开发和移植性。
本文还将指导读者在使用Constraint时需要注意的事项,并提供调试和验证Constraint 文件的方法和技巧。
keil的manage project items原理
keil的manage project items原理Keil的Manage Project Items原理解析Keil MDK(Microcontroller Development Kit)是Keil软件提供的一款专门针对ARM Cortex-M架构的嵌入式系统开发工具集。
Keil MDK通过其集成开发环境(IDE)和配套的编译器、调试器等工具,为嵌入式系统开发提供了便捷和高效的开发平台。
其中,Keil的Manage Project Items 是Keil MDK中用于管理项目文件的重要功能之一。
本文将从基本概念、使用方法、工作原理等方面对Keil的Manage Project Items进行详细解析。
一、基本概念1.1 项目文件在Keil MDK中,项目文件是指用于存储开发项目的各种资源和配置信息的文件集合。
项目文件是整个开发过程中的核心,包括源代码文件、头文件、链接脚本、配置文件等。
项目文件的正确组织和管理对开发者来说至关重要,可以提高开发效率和代码维护性。
1.2 Manage Project ItemsKeil的Manage Project Items是指在Keil MDK中用于管理项目文件的功能集合。
通过Manage Project Items,开发者可以方便地添加、删除、查看、编辑项目文件,以及管理项目的构建选项、链接选项等。
ManageProject Items提供了GUI界面,使得管理项目文件变得简单直观。
二、使用方法2.1 打开Manage Project Items在Keil MDK的集成开发环境中,点击菜单栏上的“Project”,选择“Manage Project Items”选项,即可打开Manage Project Items。
也可以使用快捷键“Ctrl+J”打开。
2.2 添加项目文件在Manage Project Items界面中,可以通过点击“Add”按钮或者右键点击项目文件夹选择“Add Files to Group”来添加项目文件。