扭摆法测定物体转动惯量
用扭摆法测定物体的转动惯量

用扭摆法测定物体的转动惯量一、实验目的1.用扭摆测定弹簧的扭转常数K 。
2.用扭摆测定几种不同形状物体的转动惯量,并与理论值进行比较。
3.验证平行轴定理。
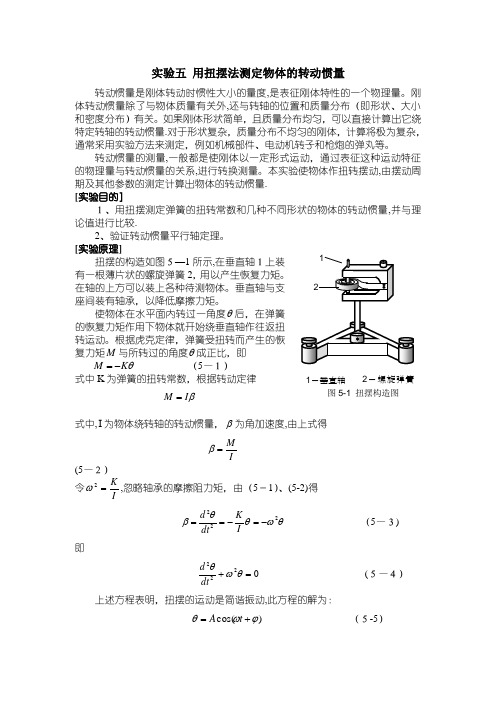
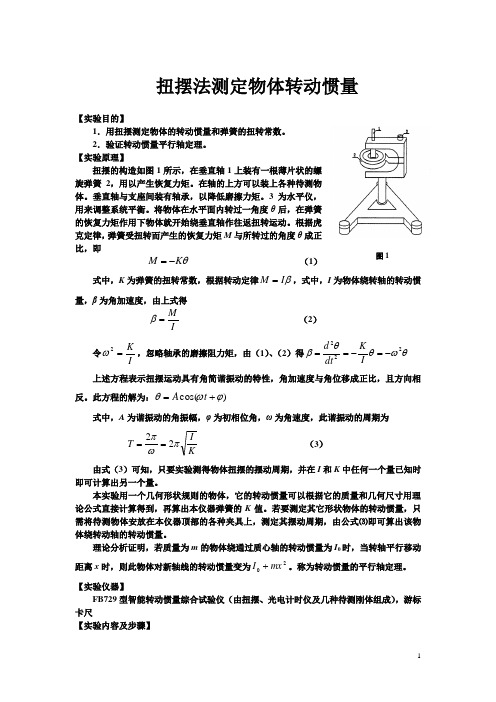
二、实验仪器1.转动惯量测试仪2.几种待测刚体(空心金属圆柱体、实心塑料圆柱体、木球、验证转动惯量平行轴定理的细金属杆,杆上有两块可以自由移动的金属滑块)三、实验原理1.扭摆的简谐运动将物体在水平面内转过一角度后,在弹簧的恢复力矩作用下,物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度成正比,即θK M -= (1)式中K 为弹簧的扭转常数。
根据转动定律βI M = (2)式中I 为转动惯量,β为角加速度,由(1)式和(2)式得θβIK-= 其中IK=2ω,忽略轴承的摩擦力矩,则有 θωθθβ222-=-==I Kdtd上式表明扭摆运动是简谐振动,且角加速度与角位移成正比,方向相反。
此方程的解为)cos(φωθ+=t A图1 扭摆结构图式中A 为简谐振动的角振幅, φ为初位相,ω为角频率。
此简谐振动的周期为KIT πωπ22==(3) 利用公式(3)式,测得扭摆的周期T ,在I 和K 中任何一个量已知时即可计算出另一个量。
本实验用一个转动惯量已知的物体(几何形状有规则,根据它的质量和几何尺寸用理论公式计算得到),测出该物体摆动的周期,再算出本仪器弹簧的K 值。
若要测量其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,由(3)式即可计算出该物体绕转动轴的转动惯量。
2.平行轴定理若质量为m 的物体绕通过质心轴的转动惯量为I 。
,当转轴平行移动距离x 时,则此物体对新轴的转动惯量20mx I I C +=,称为转动惯量的平行轴定理。
四、实验内容与步骤一 用游标卡尺测圆柱体的直径,金属圆筒的内外径等。
(各测量3次)。
用数字式电子台秤分别测出待测物体的质量。
木球体质量见球体上标签,直径取134毫米。
实验扭摆法测定体转动惯量

实验扭摆法测定体转动惯量————————————————————————————————作者:————————————————————————————————日期:实验2-10 扭摆法测物体的转动惯量【引言】转动惯量是刚体转动时惯性大小的量度,是表明刚体特性的一个物理量。
刚体相对于某转轴的转动惯量,是组成刚体的各质元质量与它们各自到该转轴距离平方的乘积之和。
刚体的转动惯量与以下因素有关:刚体的质量:各种形状刚体的转动惯量都与它自身的质量成正比;转轴的位置:并排的两个刚体的大小、形状和质量都相同,但转轴的位置不同,转动惯量也不同;质量的分布:质量一定、密度相同的刚体,质量分布不同(即刚体的形状不同)转动惯量也不同。
如果刚体形状简单,且质量分布均匀,可以直接计算出它绕特定转轴的转动惯量。
对于形状复杂,质量分布不均匀的刚体,计算将极为复杂,通常采用实验方法来测定,例如机械部件、电动机转子和枪炮的弹丸等。
转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
本实验使物体做扭转摆动,由摆动周期以及其它参数的测定计算出物体的转动惯量。
在国际单位制中,转动惯量的单位是2m kg ⋅(千克·米2)。
【实验目的】1. 测定弹簧的扭转常数2. 用扭摆测定几种不同形状物体的转动惯量,并与理论值进行比较3. 验证转动惯量平行轴定理【实验仪器】扭摆 附件为塑料圆柱体 金属空心圆筒 实心球体 金属细长杆(两个滑块可在上面自由移动) 数字式定数计时器 数字式电子秤【实验原理】扭摆的构造如图2-10-1所示,在垂直轴1上装有一根薄片状的螺旋弹簧2,用以产生恢复力矩。
在轴的上方可以装上各种待测物体。
垂直轴与支座间装有轴承,以降低磨擦力矩。
3为水平仪,用来调整系统平衡。
将物体在水平面内转过一角度θ后,在弹簧的恢复力矩作用下物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ成正比,即 θK M -= (2-10-1) 式中,K 为弹簧的扭转常数,根据转动定律 βI M =图2-10-1式中,I 为物体绕转轴的转动惯量,β为角加速度,由上式得 IM =β (2-10-2)令 IK=2ω ,忽略轴承的磨擦阻力矩,由(2-10-1)、(2-10-2)得 θωθθβ222-=-==I K dt d上述方程表示扭摆运动具有角简谐振动的特性,角加速度与角位移成正比,且方向相反。
实验五用扭摆法测定物体的转动惯量
均值,至此,P1(第一次测量)测量完毕。 (5)按“执行"键,“P1”变为“P2”, 数据显示又回到“000。0”,仪器
处在第二次待测状态,本机设定重复测量的最多次数为 5 次,即(P1,P2,…P5)。
通过“查询"键可知各次测量的周期值 Ci ( i =1,2,3,…5)以及它们的平均值 CA 。
2、 如何用本装置来测定任意形状物体绕特定轴的转动惯量?
[附录]转动惯量测试仪的构造及使用方法:
1、转动惯量测试仪的构造
转动惯量测试的单片机作控制系统,用于测量物体转动和摆动的周期,以及
旋转体的转速,能自动记录、存储多组实验数据并能精确地计算多组实验数据的
通常采用实验方法来测定,例如机械部件、电动机转子和枪炮的弹丸等。
转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征
的物理量与转动惯量的关系,进行转换测量。本实验使物体作扭转摆动,由摆动周
期及其他参数的测定计算出物体的转动惯量.
[实验目的]
1、用扭摆测定弹簧的扭转常数和几种不同形状的物体的转动惯量,并与理
3、机座应保持水平状态. 4、在安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺丝旋紧,
否则扭摆不能正常工作。
5、在称量金属细杆的质量时,必须将支架取下,否则会带来极大误差。 [数据处理] 1、测定扭摆的仪器常数(弹簧的扭转常数)K
次
物理量
数
1
2
3
平均值
塑料圆柱体的质量 (kg) 塑料圆柱体的直径 (m)
论值进行比较.
2、验证转动惯量平行轴定理。
[实验原理]
扭摆的构造如图5—1 所示,在垂直轴1上装
扭摆法测量物体的转动惯量
扭摆法测量物体的转动惯量
实验步骤:
,各测量三1.用游标卡尺测出高、低两个塑料圆柱体的直径D,金属圆筒内、外径D D
内外次;用电子计重秤称重各个物体的质量,各测量一次,记下数据。
2.调整扭摆底座调平螺钉,使水平仪的气泡位于中心。
T,测量三次,3.调整光电探头位置,使载物盘上接光杆处于其缺口中心,测量摆动周期
0记下对应数据。
4.将金属圆筒,高、低两个塑料圆柱体放在载物盘上,测定其对应的摆动周期T,测量三
次,记下对应的数据。
5.由测得的数值各求出平均值,算出对应的被测物体的转动惯量,并与理论值作对比,求
出误差。
6.计算扭摆弹簧的转动常数K。
实验误差产生原因:
1.摆动变化角度过大产生的误差
2.测量物体几何尺寸读数时产生的误差
3.测量周期计时时产生的误差
4.轴承摩擦力矩产生的误差
实验问题思考分析:
1.扭摆的角度有何要求?为什么?
答:由于弹簧的扭转常数K值不是固定的常数,与摆动角度略有关系,缩小角度时变小,摆角在90°左右时基本相同。
若摆角不满足,M kθ
=
不成立,将带来实验系统误差。
2.圆柱体的轴心与转轴重合放置时的转动惯量和圆柱体的轴心与转轴垂直且质心通过转
轴放置时的转动惯量是否相同?为什么?
答:不相等。
物体的转动惯量大小不仅与物体的质量有关,而且与物体的形状、大小、质量分布以及转动位置有关。
扭摆法测定物体的转动惯量

6
实验中的注意事项
实验中的注意事项
在安装扭摆器和待测 物体时:要确保它们 的平衡稳定,避免实 验过程中出现晃动或
摇摆
在测量周期时:要 保证光电门传感器 的位置正确,以便 准确地测量物体转
动的周期
在使用落体法测量 转动角时:要确保 重物的质量适中, 以避免对测量结果
产生过大的误差
在计算转动惯量时: 要确保使用的公式 和数据准确无误,
4
实验结果与分析
实验结果与分析
实验结果
在实验过程中,我们 测量了不同角度下的 周期,并通过落体法 测量了转动角。通过 这些数据,我们可以 计算出物体的转动惯
量
结果分析
通过对比实验结果与理论值 的差异,可以评估实验的准 确性。如果差异较大,可能 是由于实验操作不当、测量 误差等原因引起的。此外, 还可以进一步分析物体转动 惯量的变化规律,例如是否
扭摆法测定物体的转 动惯量
-
1 2 3 4
目录
CONTENTS
实验目的
5
实验原理
6
实验步骤
7
实验结果与分析
结论 实验中的注意事项 实验中的拓展思考
2
1
实验目的
实验目的
学习使用落 体法测量转
动角
掌握扭摆法 测定物体转 动惯量的原 理和方法
了解物体转 动惯量的变
化规律
2
实验原理
实验原理
1
扭摆法是一种通过测量 物体在扭摆过程中产生 的转动角来测定物体转 动惯量的方法。当物体 在绕自身轴线的微小转 动过程中,其转动角与 转动惯量、角速度以及 周期有关。根据牛顿第 二定律,有
与质量、形状等因素有关
5
结论
用扭摆法测定物体的转动惯量实验报告
用扭摆法测定物体的转动惯量实验报告实验名称:用扭摆法测定物体的转动惯量实验报告实验目的:通过使用扭摆法测定物体的转动惯量,掌握扭摆法的原理和测量方法,以及加深对转动惯量和角加速度之间关系的理解。
实验器材:扭摆器、计时器、测试物体(圆环、扁盘和圆球)、刻度尺、卡尺、量角器。
实验原理:扭摆器的基本组成部分是扭簧,当物体受到扭簧的作用时,它将发生弹性变形,使扭摆器发生扭转。
当扭摆器发生扭转时,物体受到一个扭力矩,使它产生一个角加速度。
根据牛顿第二定律,扭力矩等于物体的转动惯量乘以角加速度,因此可以通过扭摆法测定物体的转动惯量。
实验步骤:1. 确定测试物体的重量和半径,并使用卡尺和刻度尺测量测试物体的几何参数。
2. 将测试物体固定在扭摆器上,并确定扭簧的初始位置。
3. 释放扭簧,记录测试物体在扭摆器上的振动时间和振动的圈数。
4. 根据测量结果计算测试物体的转动惯量,并比较实验结果与理论值的差异。
实验数据:测试物体圆环扁盘圆球质量(g) 150 200 100半径(cm) 5 7 4振动时间(s) 10.2 12.5 9.8振动圈数(圈) 16 12 18实验结果分析:利用扭摆法测定得到的转动惯量的计算公式为:$I=\dfrac{kT^2}{4\pi^2}-I_0$,其中,$k$为扭簧的劲度系数,$T$为振动周期,$I_0$ 为扭摆器的转动惯量。
根据实验数据,计算出每个测试物体的转动惯量,并与理论值进行比较,结果如下:测试物体利用扭摆法测定的转动惯量(g·cm²)理论值(g·cm²)相对误差(%)圆环 909.35 890.26 2.14扁盘 1160.40 1153.76 0.58圆球 325.21 320.79 1.39由上表可知,我们所得到的测量结果与理论值基本吻合。
相对误差均小于5%,说明本次实验精度较高,结果较为可靠。
结论:通过本次实验,我们掌握了扭摆法测定物体的转动惯量的原理和测量方法,并得到了较为准确的测量结果。
扭摆法测物体的转动惯量

扭摆法测定物体转动惯量1 实验目的1)熟悉扭摆的构造、使用方法,以及转动惯量测试仪的使用方法;2)学会用扭摆测定几种不同形状物体的转动惯量和弹簧的扭转常数,并与理论值进行比较;3)验证转动惯量平行轴定理。
2 实验仪器扭摆、转动惯量测试仪、卡尺3 实验原理3.1原理将物体在水平面内转过一定的角度,在扭摆的弹簧的恢复力矩作用下物体绕垂直轴作往返扭转运动。
根据胡克定律有:M= - K Θ (1)根据转动定律有:M= Ιβ (2)令ω2=K/I ,忽略轴承的摩擦阻力矩,由(1)、(2)得:θωθθβ222-=-==I Kdtd上述方程表示扭摆运动具有角简谐振动的特性,角加速与角位移成正比,且方向相反。
此方程的解为: )cos(ϕωθ+=t A式中,A 为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动的周期为: KIT πωπ22== (3) 由(3)式得:224πKT I =可见只要知道弹簧扭转常数,测得物体扭摆的摆动周期,便可确定物体的转动惯量I 。
3.2弹簧扭转常数测量方法本实验利用公式法先测得圆柱体的转动惯量,再用扭摆测出载物盘的摆动周期T 1,再把圆柱体放到载物盘上,测出此时的摆动周期T 2,分别代入(4)式,整理得:2122024T T I K -=π (5) 其中I 0为圆柱体的转动惯量。
4 实验内容和步骤4.1 测定扭摆装置的弹簧扭转常数1)选择圆柱体,重复6次测量其几何尺寸及其质量,根据公式确定其转动惯量;2)把载物盘安装在转轴上并紧固,调整扭摆机座底脚螺丝,使水平仪的气泡位于中心;3)调节好计时装置,并调光电探头的位置使载物盘上的挡光杆处于其缺口中央且能遮住发射、接收红外光线的小孔;4)让其摆动,重复测量6次20个周期t 1;5)把圆柱体置于载物盘上,再让其摆动并重复6次测量20个周期t 2。
4.2 测定球体的转动惯量1)将塑料球安装在扭摆的转轴上并紧固; 2)让其摆动并重复6次测定10个周期t 4.3 验证转动惯量平行轴定理1)装上金属细杆(金属细杆中心必须与转轴重合),测定摆动周期t (10个T ); 2)将滑块对称放置在细杆两边的凹槽内,此时滑块质心离转轴的距离分别为5.00,10.00,15.00 ,20.00,25.00cm ,测定摆周期t (10个T ),验证转动惯量平行轴定理(计算转动惯量时,应扣除支架的转动惯量)。
扭摆法测定物体转动惯量.doc
扭摆法测定物体转动惯量.doc
扭摆法是一种常用的测定物体转动惯量的方法,它利用物体在水平方向受到扭动后的
摆动状态,测量物体的转动惯量。
在实验中,通过改变物体的几何形状或改变外部条件,
可以得到不同的转动惯量值,从而可以对物体的性质进行分析。
扭摆法的原理是利用物体在扭力作用下的匀加速直线运动,并测量其围绕垂直于扭力
方向的轴的振动状态,从而计算出物体的转动惯量。
具体实验步骤如下:
1.测量扭力和扭转角度
将一根细绳绕在物体上,用一个扭力计施加一定的扭力,使物体开始扭动。
同时,用
一个角度计测量物体的扭转角度,并记录下来。
2.测量转动周期
将物体放置在支撑轴上,轴的方向垂直于扭力方向。
在物体开始自由振动时,用计时
器测量振动周期,并记录下来。
3.计算转动惯量
根据扭力测量值、扭转角度和物体的几何形状计算出扭转力矩,然后利用转动周期计
算出物体的转动惯量。
扭摆法可以用于测定各种形状的物体的转动惯量,但要求物体转动惯量足够大,以确
保实验数据的准确性。
此外,在实验中需注意控制外界因素的影响,如防止空气阻力和振
动干扰,保证实验数据的可靠性。
综上所述,扭摆法是一种可靠的测定物体转动惯量的方法,它不仅可以用于物理实验,也广泛用于机械工程、材料学、航空航天等领域的研究中。
用扭摆法测定物体的转动惯量实验报告

一、实验目的1. 理解并掌握扭摆法测定物体转动惯量的原理。
2. 通过实验,测定扭摆的仪器常数(弹簧的扭转常数)K。
3. 测定不同物体(如熟料圆柱体、金属圆筒、木球与金属细长杆)的转动惯量。
4. 验证转动惯量的平行轴定理。
二、实验器材1. 扭摆仪器2. 转动惯量测试仪3. 熟料圆柱体、金属圆筒、木球与金属细长杆4. 游标卡尺5. 米尺托盘天平三、实验原理扭摆法测定物体转动惯量的原理基于胡克定律和转动定律。
当物体在水平面内转过一定角度后,在弹簧的恢复力矩作用下,物体开始绕垂直轴作往返扭转运动。
根据胡克定律,弹簧受扭转而产生的恢复力矩M与所转过的角度θ成正比,即:\[ M = K \theta \]其中,K为弹簧的扭转常数。
根据转动定律,物体绕转轴的转动惯量I与角加速度α的关系为:\[ I \alpha = M \]将上述两式联立,得到:\[ I \alpha = K \theta \]忽略轴承的摩擦阻力矩,物体扭摆运动具有角简谐振动的特性,角加速度与角位移成正比,且方向相反。
因此,角加速度α可以表示为:\[ \alpha = -\omega^2 \theta \]其中,ω为角速度。
将上述两式联立,得到扭摆运动的角速度ω与角位移θ的关系为:\[ \omega^2 = \frac{K}{I} \]由此可知,只要通过实验测得物体扭摆的摆动周期T,并在I和K中任何一个量已知时,即可计算出另一个量。
四、实验步骤1. 将扭摆仪器调至水平,并记录下弹簧的扭转常数K。
2. 分别将熟料圆柱体、金属圆筒、木球与金属细长杆放置在扭摆仪器上,测量它们的摆动周期T。
3. 根据公式 \( I = \frac{K}{\omega^2} \),计算每个物体的转动惯量。
4. 将测得的转动惯量与理论值进行比较,验证平行轴定理。
五、实验结果与分析1. 测得扭摆的仪器常数K为0.012 N·m·rad⁻¹。
2. 测得熟料圆柱体的转动惯量为0.018 kg·m²,金属圆筒的转动惯量为0.022 kg·m²,木球的转动惯量为0.014 kg·m²,金属细长杆的转动惯量为0.025 kg·m²。
扭摆法测定物体转动惯量_3
扭摆法测定物体转动惯量【实验目的】1.用扭摆测定物体的转动惯量和弹簧的扭转常数。
2.验证转动惯量平行轴定理。
【实验原理】扭摆的构造如图1所示,在垂直轴1上装有一根薄片状的螺旋弹簧2,用以产生恢复力矩。
在轴的上方可以装上各种待测物体。
垂直轴与支座间装有轴承,以降低磨擦力矩。
3为水平仪,用来调整系统平衡。
将物体在水平面内转过一角度θ后,在弹簧的恢复力矩作用下物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ成正比,即θK M -= (1)式中,K 为弹簧的扭转常数,根据转动定律βI M =,式中,I 为物体绕转轴的转动惯量,β为角加速度,由上式得IM=β (2) 令IK=2ω,忽略轴承的磨擦阻力矩,由(1)、(2)得θωθθβ222-=-==I K dt d 上述方程表示扭摆运动具有角简谐振动的特性,角加速度与角位移成正比,且方向相反。
此方程的解为:)cos(ϕωθ+=t A式中,A 为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动的周期为KIT πωπ22==(3) 由式(3)可知,只要实验测得物体扭摆的摆动周期,并在I 和K 中任何一个量已知时即可计算出另一个量。
本实验用一个几何形状规则的物体,它的转动惯量可以根据它的质量和几何尺寸用理论公式直接计算得到,再算出本仪器弹簧的K 值。
若要测定其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,由公式⑶即可算出该物体绕转动轴的转动惯量。
理论分析证明,若质量为m 的物体绕通过质心轴的转动惯量为I 0时,当转轴平行移动距离x 时,则此物体对新轴线的转动惯量变为20mx I +。
称为转动惯量的平行轴定理。
【实验仪器】FB729型智能转动惯量综合试验仪(由扭摆、光电计时仪及几种待测刚体组成),游标卡尺【实验内容及步骤】图11.用游标卡尺测量塑料圆柱体的外径6次。
2.调整扭摆基座底脚螺丝,使水平仪的气泡位于中心。
扭摆法测定物体转动惯量

10.00
15.00
20.00
25.00
4
【注意事项】
1. 取、放和安装待测物体要小心,不得摔碰。 2. 请勿测量圆球的质量(超过电子天平量程) 。 3. 测量时各部分的锁紧螺栓都应拧紧,确保刚体摆动平稳。 4. 随时调整底脚螺栓,保持扭摆机座应水平。 , 5. 测量时摆角应在 40O~90O 范围,不宜过大或过小。
【实验原理】
(一)扭摆法 当研究的问题涉及到物体的转动时,必须考虑物体的大小和形状,不能再将物体视为质点, 但如果物体的大小和形状的改变可以忽略, 实际物体就可以抽象为具有不变的大小和形状的刚体。 定轴转动是刚体的一种较简单的运动,描述定轴转动基本规律的动力学方程为 M=Iβ。M 是对定 轴的力矩,β 是角加速度,就是刚体对定轴的转动惯量。 实验测定刚体的转动惯量,一般都是使刚体以某一形式运动,通过测定与转动惯量有关系的 某个描述该运动特征的物理量来间接地得到刚体的转动惯量。测定转动惯量的实验方法较多。如 扭摆法、旋转法、三线摆法等,本实验采用的扭摆法就是利用刚体的转动惯量和扭摆摆动周期的 关系来测定刚体的转动惯量。 扭摆装置如图 1 所示。待测刚体可以固定在扭摆的垂轴上,垂轴装有 用以产生恢复力矩的薄片状螺旋弹簧, 使刚体在水平面内转过一个角度 θ, 在弹簧的恢复力矩作用下,刚体就开始绕垂轴作往返扭转摆动。根据胡克 定律,弹簧受扭转后产生的恢复力矩 M 与角位移 θ 成正比
(13)
图 3 金属圆柱形滑块
2.扭转常数 K 值的确定 利用机座上的水平仪调整机座水平,在扭摆垂轴上装上金属载物盘并锁紧,金属载物盘装有 一挡光杆,通过数字式计时器的光电探头挡光而测量其摆动周期。调整光电探头的位置,使其处 于挡光杆的平衡位置处,挡光杆应位于空隙中央能遮住发射接受红外线的小孔又不与探头接触。
实验4 扭摆法测定物体转动惯量

实验4 扭摆法测定物体转动惯量
扭摆法是一种常用的测量物体转动惯量的方法。
本实验通过在水平面内转动不同几何形状和质量的物体,通过测量其周期和摆长,计算出物体的转动惯量。
实验中,分别测量了圆环、圆盘和长条形板材的转动惯量。
实验步骤:
1. 实验器材:
扭摆装置、计时器、木块(待测物体)、尺子、电子秤。
2. 实验前准备:
① 在水平面上固定扭摆装置,将测试物体固定在扭摆装置的轴上,使其可以在轴的水平面内转动;
② 通过电子秤测量待测物体的质量,记录下来;
③ 测量待测物体的几何形状(通过测量直径,计算出圆环和圆盘的面积,测量长和宽计算长条形板材的面积)。
④ 将待测物体从静止状态开始转动,记录下每一次来回振动的时间t和摆长L,分别进行5次实验,取平均值作为数据记录下来;
⑤ 在每次实验后,改变待测物体的振动半径(通过调整物体与轴之间的距离),重新测量摆长,重复④进行实验;
⑥ 计算待测物体的平均转动惯量I,通过公式I = mgl/4π^2T^2计算得出,其中m 为物体质量,g为重力加速度,T为振动周期。
经过多次实验和计算,得出圆环、圆盘和长条形板材的转动惯量分别为:
圆环的转动惯量为I = 0.013 kg·m^2;
根据实验结果可知,圆盘的转动惯量最大,长条形板材的转动惯量最小。
这是因为圆盘的质量分布较为均匀,并且转动惯量的大小与形状密切相关。
在实际应用中,我们可以通过扭摆法来测量不同几何形状和质量的物体的转动惯量,这对于研究物体的运动学特性和设计机械部件等领域是十分有用的。
扭摆法测物体转动惯量实验报告
扭摆法测物体转动惯量实验报告扭摆法测物体转动惯量实验报告引言转动惯量是描述物体绕某一轴旋转时所表现出的惯性特征的物理量。
在本次实验中,我们使用了扭摆法来测量物体的转动惯量。
扭摆法是一种简单而有效的实验方法,通过扭转物体并观察其振动周期,可以间接地计算出物体的转动惯量。
实验装置和原理实验装置主要由一根细长的金属丝、一个物体样品和一个计时器组成。
首先,将金属丝悬挂在支架上,并将物体样品固定在金属丝的下端。
然后,用手扭转金属丝,使物体样品发生转动。
通过观察物体样品的振动周期,可以推导出物体的转动惯量。
实验步骤1. 将金属丝悬挂在支架上,并确保其水平放置。
2. 将物体样品固定在金属丝的下端,确保物体的重心与金属丝的轴线重合。
3. 用手扭转金属丝,使物体样品发生转动。
4. 计时器开始计时,记录物体样品的振动周期。
5. 重复实验多次,取平均值作为最终结果。
数据处理与结果分析根据实验数据,我们可以计算出物体的转动惯量。
假设物体的转动惯量为I,振动周期为T,金属丝的扭转角度为θ。
根据扭摆法的原理,可以得出以下公式:I = (4π^2mL^2) / T^2其中,m为物体的质量,L为金属丝的长度。
通过对实验数据的处理,我们可以得到物体的转动惯量的数值。
进一步分析实验结果,我们可以发现转动惯量与物体的质量、金属丝的长度以及振动周期之间存在一定的关系。
首先,转动惯量与物体的质量成正比。
物体的质量越大,其转动惯量也越大。
这是因为物体的质量增加会使其惯性增加,从而使得转动惯量增大。
其次,转动惯量与金属丝的长度平方成正比。
金属丝的长度越长,物体的转动惯量也越大。
这是因为金属丝的长度增加会使得物体的有效转动半径增加,从而使得转动惯量增大。
最后,转动惯量与振动周期的平方成正比。
振动周期越大,物体的转动惯量也越大。
这是因为振动周期的增大意味着物体的转动速度较慢,从而使得转动惯量增大。
结论通过扭摆法测量物体的转动惯量,我们可以得出以下结论:1. 物体的转动惯量与其质量成正比。
扭摆法测定物体转动惯量(00001)

扭摆法测定物体转动惯量()2210'212148T T K J mD π-==即可得到K ,再将K 代回第一式和第三式可以得到载物盘的转动惯量为'21002210J T J T T =-只需测得其它的摆动周期,即可算出该物体绕转动轴的转动惯量:224T KJ π=1. 转动惯量的平行轴定理若质量为m 的物体绕质心轴的转动惯量为J c 时,当转轴平行移动距离x 时,则此物体对新轴线的转动惯量:'2c J J mx =+2. 实验中用到的规则物体的转动惯量理论计算公式圆柱体的转动惯量:22220128D m J r h rdr mD h r ππ=⋅=⎰金属圆筒的转动惯量:()2218J J J m D D =+=+外外内内木球的转动惯量:()()22223211sin cos 42103m J R R Rd mD R πππϑϑϑπ-==⎰金属细杆的转动惯量:222012212L m J r dr mL L ==⎰二、 实验步骤1. 用游标卡尺、钢尺和高度尺分别测定各物体外形尺寸,用电子天平测出相应质量; 2. 根据扭摆上水泡调整扭摆的底座螺钉使顶面水平;3. 将金属载物盘卡紧在扭摆垂直轴上,调整挡光杆位置和测试仪光电接收探头中间小孔,测出其摆动周期T ;4. 将塑料圆柱体放在载物盘上测出摆动周期T 1。
已知塑料圆柱体的转动惯量理论值为J 1’,根据T 0、T 1可求出K 及金属载物盘的转动惯量J 0。
5. 取下塑料圆柱体,在载物盘上放上金属筒测出摆动周期T 2。
6. 取下载物盘,测定木球及支架的摆动周期T。
37.取下木球,将金属细杆和支架中心固定,,外加两滑块卡在细杆上测定其摆动周期T4的凹槽内,在对称时测出各自摆动周期,验证平行轴定理。
由于此时周期较长,可将摆动次数减少。
三、注意事项1.由于弹簧的扭摆常数K不是固定常数,与摆角有关,所以实验中测周期时使摆角在90度左右。
扭摆法测定物体转动惯量

M k(1)
式中,k为弹簧的扭转常数。根据转动定律
MI
式中,I为物体绕转铀的转动惯量,B为角加速度, 由上式得
k
f,且忽略轴承的摩擦阻力矩,由式(1)、(2)得:
2)间接比较法测量,确定扭转常数K
已知标准物体的转动惯量11,被测物体的转动惯量lo;被测物体的摆动周期To,标准物体被测物体的摆动周期Ti。通过间接比较法可测得
Il
T。2
Ti2To2
d2k
dF T
上述方程表示扭摆运动具有角简谐振动的特性, 相反,此方程的解为:
Acos( t)
(3)
由(3)式可知,只要实验测得物体扭摆的摆动周期,并在I和k中任何一个量
已知时即可计算出另一个量。
理论分析证明,若质量为m的物体绕通过质心轴的转动惯量为Io时,当转 轴平行移动距离x时,则此物体的转动惯量变为lo+mx2。称为转动惯量的平行轴 定理。法测定物体转动惯量
实验名称:
小组成员:
1、实验目的:
1)用扭摆测定几种不同形状物体的转动惯量和弹簧的扭转常数,并与理论值进 行比较;
2)验证转动惯量平行轴定理。
2、实验设备及材料:
1)扭摆及几种待测转动惯量的物体;
空心金属圆柱体、实心塑料圆柱体、木球、验证转动惯量平行轴定理用的稀金属 杆,杆上有两块可以自由移动的金属滑块;
2)游标卡尺、米尺、物理天平
3)转动惯量测试仪:由主机和光电传感器两部分组成。
3、实验原理:
1)转动惯量的测量
转动惯量的测量,一般都是使刚体以一定形式运动, 通过表征这种运动特征 的物理量,与转动惯量的关系,进行转换测量。本实验使物体作扭转摆动,由于 摆动周期及其它参数的测定计算出物体的转动惯量。
扭摆法测物体的转动惯量

实验二 扭摆法测物体的转动惯量转动惯量是刚体转动惯性大小的量度,是表征刚体特性的一个物理量。
转动惯量的大小除与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度)有关。
如果刚体形状简单,且质量分布均匀,可直接计算出它绕特定轴的转动惯量。
但在工程实践中,我们常碰到大量形状复杂,且质量分布不均匀刚体,理论计算将极为复杂,通常采用实验方法来测定。
转动惯量的测量,一般都是使刚体以一定的形式运动。
通过表征这种运动特征的物理量与转动惯量之间的关系,进行转换测量。
本实验使物体作扭转摆动,由摆动周期及其它参数的测定算出物体的转动惯量。
【实验目的】1.熟悉扭摆的构造、使用方法和转动惯量测量仪的使用;2.利用塑料圆柱体和扭摆测定不同形状物体的转动惯量J 和扭摆弹簧的扭摆常数K 。
【实验原理】本实验使物体作扭转摆动,测定摆动周期和其它参数,从而计算出刚体的转动惯量。
扭摆的构造如图2.1所示。
垂直轴上装有金属细杆,水平仪通过调节仪器底座上的三螺钉使顶面水平,螺旋弹簧用以产生恢复力矩,使垂直轴上装的待测物体作简谐振动。
扭摆的简谐振动:将待测物体装在垂直轴上,并转过一定角度θ,在弹簧的恢复力矩作用下,物体开始绕垂直轴作往返运动。
根据胡克定律知:θK -=M (2-1)K 为弹簧的扭转系数,根据转动定律得:βJ M = (2-2)J 为转动惯量,β为角加速度。
令J K =2ω,忽略轴承的摩擦力和空气阻力,则有:θωθθβ222-=K -==J dtd (2-3)上式表明物体的扭摆运动具有角简谐运动的特性,此方程的解为:)cos(φωθ+=t A (2-4)此简谐振动的周期为:K==JT πωπ22 (2-5) 所以,只要测得物体扭摆的摆动周期T ,并且转动惯量J 和K 中任何一个量可知,即可算出另一个量。
本实验通过已知转动惯量'J 的塑料圆柱体(几何形状规则,'J 可根据理论公式计算),分别测出载物盘、塑料圆柱体放在载物盘、金属圆筒放在载物盘、木球、金属细杆的摆动周期,便可求出扭摆弹簧的扭摆常数K 和转动惯量的实验值。
扭摆法测量物体转动惯量

物体装在一螺旋弹簧上,当物体在水平面内转过θ 角后弹簧 产生恢复力矩 M :
M K K为弹簧的扭转系数
在此力矩作用下物体转动,由转动定律
MJ
令
2K J
得
d2 dt 2
2
根据简谐振动规律,振动周期满足
T
2
2J K
实验基本思想
T
2
J K
可能性
如果已知 K,则测得周期 T 就可以得转动惯量 J。
问题
不知道 K。 空载时,还有托盘和支架,也有转动惯量。
计算 J总
T总
2
J总 K
J总
K 4
2
T总2
计算 J待测体
J待测体 J总 J0
无托盘时测量:
J 待测体
K 42
T
2
J 支架
注意事项
由于弹簧的扭转常数K值不是固定常数,它与摆角略有关系, 摆角在90°左右时基本相同,在小角度时变小。 为了降低实验时由于摆动角度变化过大带来的系统误差,在 测定各种物体的摆动周期时,摆角不宜过小(90°),摆幅 也不宜变化过大。 光电探头宜放置在挡光杆的平衡位置处,拦光杆不能和它相 接触,以免增大摩擦力矩。 机座应保持水平状态。 圆柱、圆筒放置时要放正不可斜放。
办法
空载时测量一次周期,加已知转动惯量的刚体再测一次周 期,这样就可以同时确定 K 和托盘支架的转动惯量了。
测定扭摆的扭转系数
解方程组
T0
2
J0 K
T1
2
J0
J
' 1
K
J0
J ' T02
1T12 T02
K
4 T12
2
T02
J
扭摆法测定物体转动惯量

实验22 扭摆法测定物体转动惯量转动惯量是刚体转动时惯性大小的量度,是表明刚体特性的一个物理量。
刚体转动惯量除了与物体质量有关外,还与转动轴的位置和质量分布(既形状、大小和密度分布)有关。
如果刚体形状简单,且质量分布均匀,可以直接计算出它绕特定转轴的转动惯量。
对于形状复杂,质量分布不均匀的刚体,计算将极为复杂,通常采用实验方法来测定,例如机械部件,电动机转子和枪炮的弹丸等。
转动惯量的测量,一般都是使刚体以一定形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
本实验使物体作扭转摆动,由摆动周期及其它参数的测定计算出物体转动惯量。
实验目的及学习要求1. 扭摆法测定弹簧的扭转常数。
2.扭摆法测定几种不同形状物体的转动惯量,并与理论值进行比较。
实验原理扭摆的构造在垂直轴上装有一根薄片状的螺旋弹簧,用以生产恢复力矩。
在轴的上方可以装上各种待测物体。
垂直轴与支座间装有轴承,以降低摩擦力矩。
水平仪用来调整系统平衡。
将物体在水平面内转动一角度θ后,在弹簧的恢复力矩作用下物体就开始绕垂直轴作往返扭转运动。
根据虎克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ成正比,即M K θ=- (22-1)式中,K 为弹簧的扭转常数。
根据转动定律:M =I β,其中I 为物体绕转轴的转动惯量,β为角加速度,由上式得β=M /I (22-2)令ω2=K /I ,忽略轴承的摩擦阻力矩,由(22-1),(22-2)得222d Kdt I θβθωθ==-=-上述方程表示扭摆运动具有角简谐运动的特性,角加速度与角位移成正比,且与方向相反,此方程的解为:Acos()t θωφ=+式中,A 为谐振动的角振幅,φ为初相位角,ω为角速度,此谐振动的周期为22T πω== (22-3)由(22-3)可知,只要实验测得物体扭摆的摆动周期,并在I ,K 中任何一个量已知即可算出另一个量。
本实验用几个几何形状规则的物体,可以根据它的质量和几何尺寸用理论公式直接计算得到它的转动惯量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
物理实验报告
一、【实验名称】
扭摆法测定物体转动惯量
二、【实验目的】
1、 测定扭摆弹簧的扭转常数K 。
2、 测定几种不同形状物体的转动惯量,并与理论值进行比较。
3、改变滑块在金属细杆上的位置,验证转动惯量平行轴定理。
三、【实验原理】
扭摆的结构如图2.1所示,将物体在水平面内转过一角度θ 后,在弹簧的恢复力矩作用下,物体就开始绕垂直轴作往返扭转运动。
根据胡克定律,弹簧受扭转而产生的恢复力矩M 与所转过的角度θ 成正比,即
M= -K θ (2.1)
根据转动定律:M=J β 得
I
M
=
β (2.2) 令I
K =2
ω,由式(2.1)、(2.2)得:θωθθβ222-=-==I K dt d 上述方程表示扭摆运动具有角简谐振动的特性,此方程的解为: )t cos(A ϕωθ+= 此谐振动的周期为: K
I
T π
ωπ
22==
(2.3) 2
24T K I π
=
(2.4) 由(2.3)或(2.4)式可知,只要实验测得物体扭摆的摆动周期,并在I 和K 中任何一
个量已知时即可计算出另一个量。
本实验用一个已知形状规则的物体,它的转动惯量可以根据它的质量和几何尺寸用理论公式直接计算得到,再算出仪器弹簧的K 值。
如先测载物盘转动的周期T 0,有
T=2K
I 0
π
(4-5) 再测载物盘加塑料圆柱(大)的转动周期T 1,有
K
I I T 1012'
+=π
(4-6) 图2.1
图2 TH -2型转动惯量测量仪面板示意图
1I '为塑料圆柱转动惯量理论计算值
1I '=22
1
mr (4-7)
由式(4-5)和式(4-6)可得
K=42
2112
T T I -'
π
(4-8) 若要测定其它形状物体的转动惯量,只需将待测物体安放在本仪器顶部的各种夹具上,测定其摆动周期,由公式(2.3)即可算出该物体绕转动轴的转动惯量。
理论分析证明,若质量为m 的物体绕通过质心轴的转动惯量为I 0,当转轴平行移动距离x 时,则此物体对新轴线的转动惯量变为I 0+mx 2。
称为转动惯量的平行轴定理。
四、【仪器用具】
1.扭摆及几种待测转动惯量的物体
金属圆筒、实心塑料圆柱体(一长一短)、实心塑料球、验证转动惯量平行轴定理用的细金属杆(杆上有两块可自由移动的金属滑块)。
2.TH -2型转动惯量测量仪 由主机和光电传感器两部分组成。
主机采用新型的单片机作控制系统,用于测量物体转动和摆动的周期,以及旋转体的转速,能自动记录、存储多组实验数据并能够准确地计算多组实验数据的平均值。
光电传感器主要由红外接收管组成,将光信号转换为脉冲电信号,送入主机工作。
因人眼无法直接观察仪器工作是否正常,可用遮光物体往返遮挡光电探头发射光束通路,检查计时器是否开始计数。
为防止过强光线对光电探头的影响,光电探头不能置放在强光下,实验时采用窗帘遮光,确保计时准确。
3.仪器使用方法
TH -2型转动惯量测量仪面板如图2所示。
(1)调节光电传感器在固定支架上的高度,使被测物体上的挡光杆能自由地通过光电门,再将光电传感器的信号传输线插入主机输入端(位于测试仪背面)。
(2)开启主机电源,“摆动”指示灯亮,参量指示为“P1”、数据显示为“- - - -”。
(3)本机设定扭摆的周期数为10,如要更改,可按“置数”键,显示“n=10”,按“上
调”键周期数依次加1,按“下调”键周期数依次减1,周期数可在1–20范围内任意设定,再按“置数”键确认。
更改后的周期数不具有记忆功能,一旦切断电源或按“复位”键,便恢复原来的默认周期数。
(4)按“执行”键数据显示为“000.0”,表示仪器已处在等待状态,此时,当被测的往复摆动物体上的挡光杆第一次通过光电门时,仪器即开始连续计时,直到仪器所设定的周期数时便自动停止计时,由“数据显示”给出累计的时间,同时仪器自动计算周期i C 予以储存,以供查询和作多次测量求平均值。
至此,P1(第一次测量)测量完毕。
(5)按“执行”键,“P1”变为“P2”,数据显示又回到“0.000”,仪器处在第二次测量状态。
本机设定重复测量的最多次数为5次,即(P1,P2,…,P5)。
通过“查询”键可知各次测量的周期值i C (i=1,2,…,5)以及它们的平均值A C 。
五、【实验内容】
1、 测出塑料圆柱体的外径,金属圆筒的内、外径,木球直径,金属细杆长度(各测3次);
并称出各个物体的质量。
2、 调整扭摆基座底角螺丝,使水准泡中气泡居中。
3、 装上金属载物盘,并调整光电探头的位置使载物盘上挡
光杆处于其缺口中央且能遮住发射、接受红外光线的小孔。
测定摆动周期T 0。
4、 将塑料圆柱体(长)垂直放在载物盘上,测定摆动周期
T 1。
5、 同理,测量塑料圆柱体(短)的摆动周期T 2
6、 用金属圆筒代替塑料圆柱体,测定摆动周期T 3。
7、 取下载物金属盘、装上木球,测定摆动周期T 4。
(在计算木球的转动惯量时,应扣除支
座的转动惯量)。
8、 取下木球,装上金属细杆(金属细杆中心必须与转轴重合),测定摆动周期T 5。
(在计
算金属细杆的转动惯量时,应扣除夹具的转动惯量)。
将滑块对称放置在细杆两边的凹槽内(见图2),此时滑块质心离转轴的距离分别为5.00,
10.00,15.00,20.00,25.00厘米。
9、 测定摆动周期T 。
计算I 并与理论值进行比较(计算转动惯量时应扣除夹具的转动惯量)。
验证转动惯量的平行轴定理。
六、【注意事项】
1、由于弹簧的扭转常数K 值不是固定常数,摆角在900左右才基本相同。
为了降低实验时由于摆动角度变化过大带来的系统误差,在测定各种物体的摆动周期时摆角不宜过小,摆幅也不宜变化过大。
2、探头宜放置在挡光杆的平衡位置处,挡光杆不能与它相接触,以免增大摩擦力矩。
3、机座应保持水平状态。
4、在安装待测物体时,其支架必须全部套入扭摆主轴,并将止动螺丝旋紧,否则扭摆不正
常工作。
5、称量金属细杆与木球的质量时,必须将夹具或支座取下,否则会带来较大误差。
七、【数据处理】
1.由实验数据和公式(4-8)可得扭摆的仪器常量K=0.0414
八、【思考讨论】
本实验对摆动角度有什么要求?如果没满足实验要求将带来什么误差?
答:摆角在900—1200左右扭转常数K 值才基本相同。
若摆角不满足,M= -K θ就不成立,所以摆动角度变化会给实验带来系统误差。
九、【附上原始数据】
金属细杆夹具转动惯量实验值:I 夹具=0.0321⨯10—4
2m Kg ⋅
木球支座转动惯量实验值:I 球支座=0.0187⨯10
—4
2m Kg ⋅
两滑块绕通过质心转轴的转动惯量理论值:I 5=0.772⨯10—4
2m Kg ⋅,每一滑块的质量
m=238g 。