GW16、17型隔离开关说明资料
GW16、17型隔离开关说明
.GW16、17-252 型隔离开关的使用说明:由于GW16型和GW17型的产品结构和动作原理相同,下面以GW16型为例进行介绍1 概述1.1 产品用途GW16-252 型单柱垂直断口隔离开关(以下简称隔离开关)是供220kV 高压线路在无载流情况下进行切换和对被检修的高压母线及其它电气设备与带电线路进行电气隔离的三极户外高压电器。
本隔离开关具有载流能力大、占地面积小等特点,是220kV电站中进出线互为90布置时的一种理想的隔离开关,它结构紧凑、运动部分密封良好,因此,一般很少需要检修。
1.2 操动机构型号每一组隔离开关配一台CJ7A型电动操动机构,附装的接地开关配CSC型人力操动机构。
1.3 产品主要规格本产品规格有两种:不接地、接地。
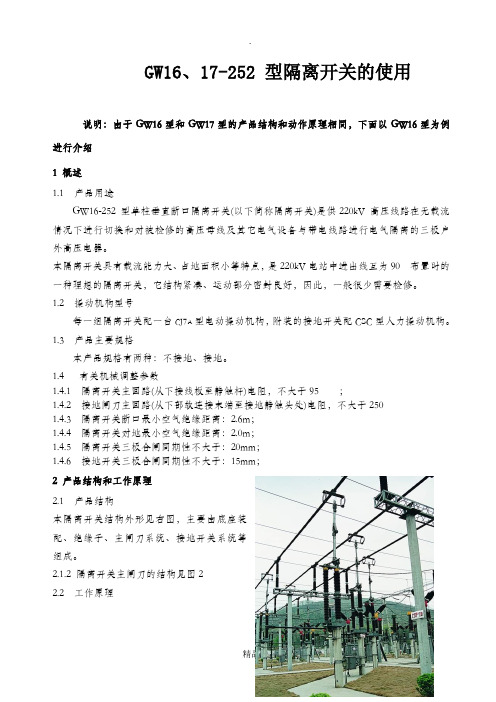
1.4 有关机械调整参数1.4.1 隔离开关主回路(从下接线板至静触杆)电阻,不大于95;1.4.2 接地闸刀主回路(从下部软连接末端至接地静触头处)电阻,不大于2501.4.3 隔离开关断口最小空气绝缘距离:2.6m;1.4.4 隔离开关对地最小空气绝缘距离:2.0m;1.4.5 隔离开关三极合闸同期性不大于:20mm;1.4.6 接地开关三极合闸同期性不大于:15mm;2 产品结构和工作原理2.1 产品结构本隔离开关结构外形见右图,主要由底座装配、绝缘子、主闸刀系统、接地开关系统等组成。
2.1.2 隔离开关主闸刀的结构见图22.2 工作原理本隔离开关的运动过程是由两部分运动复合而成的,即折叠运动和夹紧运动。
折叠运动:由CJ7A型机构驱动旋转瓷瓶作水平转动,与旋转瓷瓶相连的一对伞齿轮带动平面双四连杆运动,从而使下导电管顺时针转动合闸,逆时针转动分闸;由于调整螺杆装配与下导电管的铰接点不同,从而使与调整螺杆装配上端铰接的操作杆相对于下导电管作轴向位移,而操作杆的上端与齿条固连,这样齿条的移动便推动齿轮转动,从而使与齿轮轴固连的上导电管相对于下导电管作伸直(合闸)或折叠(分闸)运动;另外,在操作杆轴向位移的同时,平衡弹簧按预定的要求储能或释能,最大限度地平衡刀闸的重力矩,以利于刀闸的运动。
GW16

1. GW16-220、GW17-220型隔离开关简介GW16(17)-220型隔离开关从八十年代初至今已大量在电网中运行,特点是单柱、垂直断口、折叠式分合。
由于结构上的不同,它的运行维护与其他型号的隔离开关相比有其自身特点。
它主要由三个单级组成,极间用水平传动杆相连接,每组隔离开关配一台CJ7电机操动机构,正常工作时采用电动机操动,检修、调试及事故状态时可采用操作手柄进行手力操动,同时,每极隔离开关可配1台或2台JW6-220接地闸刀和1台或2台CS17-I手力操动机构,接地闸刀的分、合闸只能采用手力操动机构操作。
隔离开关由静触头装配、主闸刀装配、转动瓷套及支持瓷套、组合底座装配、传动系统以及CJ7电机操动机构组成。
隔离开关主闸刀装配包括上导电杆装配、中间接头装配、下导电杆装配和接线底座装配。
其机械传动原理是当CJ7电机操动机构的电动机通电后即起动,通过齿轮、丝杆、丝杆螺母减速,输出轴获得很大的操作力矩,并通过安装在机构箱上方的双四连杆带动中间相(操作相)的旋转瓷套(其余两相是通过水平传动和拐臂带动的),继而通过安装在接线底座上的一对伞齿轮来驱动两侧的调节拉杆,使下导电杆运动。
上导电杆相对下导电杆作180°的转动,是通过中间接头内的齿轮与齿条来实现的。
在接近合闸和开始分闸时,连接叉中间的小滚子在齿轮箱斜面上移动,并推动上导电杆内的复位弹簧和夹紧弹簧等部件运动,使动触片合拢或分开,从而实现主闸刀的合闸和分闸。
(图1为GW16-220型隔离开关)。
接地闸刀的合闸和分闸运动是通过手力机构带动一组四连杆机构后,把操作力矩传递给接地闸刀转轴来完成的。
2. 我局GW16(17)-220型检修、改造方案简述由于刘村变220KV设备停电较困难,GW16、17型隔离开关全部超检修周期运行,因此改造与检修工作同时进行。
主要检修项目如下:(1)静触头装配检修;(2)上、下导电杆装配检查;(3)接线底座装配检修;(4)接地闸刀装配检修;(5)转动瓷套、支持瓷套检查;(6)组合底座装配检修;(7)传动系统检修;(8)检查与调试;其中包括测量隔离开关主闸刀和接地闸刀主回路的回路电阻;检查转动瓷套和支持瓷套;检查(或紧固)所有外部连接件的轴销和螺栓;检查接地闸刀与主闸刀的联锁情况;检查操动机构、传动机构,对齿轮等所有有相对运行的部分添加润滑油,并进行3~5次动作试验,以检查其灵活性及周期性,配合调整辅助开关及微动开关的动作情况,用手动检查操动机构,检查丝杆与丝杆螺母在分闸与合闸终了位置时的脱扣与入扣情况,以保证丝杆螺母能够灵活自如地在丝杆上运动;检查机构箱门的密封情况;测量二次回路的绝缘电阻;检查机构箱、接地装置、基础地脚螺栓等的紧固情况。
GW16,GW17系列隔离开关完善化演示

GW16、17系列 隔离开关完善化改进
结果展示
河南平高电气股份有限公司
GW16型
GW17型
河南平高电气股份有限公司
为提高隔离开关产品 的质量和运行可靠性,根 据GW16/17系列隔离开关 二十几年来的运行经验, 我们进行了有针对性的完 善化改进。
河南平高电气股份有限公司
绝缘件
新
旧
13. 针对上导电管下端顶压脱扣装置的绝缘滚轮,因老 化等原因在现场有碎裂的情况,把绝缘滚轮换成不锈 钢滚轮,并为了防止分流而设置了绝缘件。
河南平高电气股份有限公司
126kV硅橡胶绝缘子
为确保绝缘子的供货质量,提 高产品的运行可靠性,在国家标准 的基础上加严了尺寸公差和形位公 差,把额定抗弯水平和抗扭水平提 高到规定值的1.2倍进行检查验收, 并不定期对电瓷厂进行监督抽查, 取消一些质量不稳定的电瓷厂家的 供货资格。另外,我公司已研制成 功耐冲击、高抗弯强度的硅橡胶绝 缘子,并已应用到126kV的产品中, 其余电压等级的硅橡胶绝缘子正在 研制之中。
18. 对导电管内部所有的传动部件,全部涂二硫化
钼润滑脂进行保护,提高其润滑能力和防腐性能。
河南平高电气股份有限公司
导电管两端接触面镀锡
静触杆表面镀银
19. 取消铜铝双金属板,对所有导电接触面采用先 进工艺镀银或镀锡处理,避免接触电阻增大而带来 的过热。
河南平高电气股份有限公司
夹紧弹簧 不锈钢实心销 弹性圆柱销 20.为提高定位销的抗剪强度,将夹紧弹簧两端的 φ6弹性圆柱销换成φ7不锈钢实心销。
14. 提高绝缘子额定抗弯水平和抗扭水平。
河南平高电气股份有限公司
15. 为避免弹性圆柱销在运行期间的锈蚀,采取在 弹性圆柱销两端密封的方法进行防护,把弹性圆柱 销同外部空气隔离,避免腐蚀。 16. 开口销全部更换成不锈钢的,以避免其腐蚀。
高压电源设备GW16型隔离开关操作问题与解决方法说明书
6th International Conference on Mechatronics, Materials, Biotechnology and Environment (ICMMBE 2016)Problems and Solutions of the GW16 Type Isolation Switch in Operation Zhu Shaohong1, Shan Jia2, Yi Yongfei3, Zhu Yuanda3, Gao Yuan1, Zhu Dongyue4, Wang Yan1, Gao Tiejun1, Yu Chenguang1, Hou Ling1 1Tieling Power Supply Company,Liaoning Electric Power Company Limited,State Grid,China2Fushun Power Supply Company,Liaoning Electric Power Company Limited,State Grid,China 3Techniques training center,Liaoning Electric Power Company Limited,State Grid,China4Northeastern University***************Keywords: isolation switch; solution; over heat; corrosion; jamAbstract. GW16 type isolation switch of outdoor high voltage system is the commonly used power distribution equipment in 220 kV power system. And it is widely used in the substations that maintained by the EHV power transmission company of Hunan province. It is mainly composed ofa static contact assembly, main switch system, the knife blade, rotation of the insulator and thesupport insulator, a base assembly and transmission system, operating mechanism. It has the advantages of simple structure, convenient installation and operation, but in the operation also exists some problems, this paper in view of the problems proposed feasible solutions.ProblemsDiversion System Contact Surface Overheating1) Static contact heatingThe static contact burning, steel core aluminium wire oddlot, plywood, block cracking, bolt loosening, and transition set damage, etc.2) Conductive system overheatingDisconnecting link is not in place causes the contact point pressure of the moving and static contact is not enough, the contact surface is not smooth, and the silver plating layer is worn or falls off; the connection among the conductive strip, the contact piece and the movable contact seat is not tight, and the contact surface is oxidated; and the conduction band broken seriously, the upper guide tube and the movable contact seat contact surface is oxidated. The rotary contact of the middle joint is heated, the spring is cracked and deformed, the silver layer on the contact finger is damaged, the pressing block is damaged, the connecting base rotating contact assembly is hot; the connection between the lead wire clamp and the connecting base is loose, and the oxidation and etc.Rotation, Transmission Parts Get RustThe operate mode of GW16 type isolation switch is three-phase linkage. The three phases are formed together through connecting rod to form linkage. The mechanism drives the gear screw rod, the screw nut, the shifting fork and the stepless regulation flange plate through the electric motor to make the mechanism slow down, and to transmit the torque to the main shaft of the switch to make it move. Because of the effect of the installation level, the installation verticality of insulator and porcelain support rotation is not up to the requirements, three base are not at the same level, the level of three-phase linkage is not in the same straight line and the rod strength is not enough. Due to high operating torque, the large bevel gear and gear shaft welding of connecting base assembly falling off. The reason is that the adjustment of balance spring which in the under guide pole is not in place, the small compressibility, resulting in knife gate closing operation great torque, composite shaft sleeve crank arm connecting pin shaft corrosion, axial and copper sleeve being hard contacted.After a considerable period of time, the copper sleeve and the spindle get rust, causes the difficulties of rotation. Or the switch is no oil before installation and use, causing sleeve serious wear.© 2016. The authors - Published by Atlantis Press492Insulator RuptureThe turning porcelain fracture phenomenon is more common, also support porcelain fracture phenomenon. There also exist supporting porcelain fracture phenomenon. The main reason of the turning porcelain fracture is the rust at the rotation and transmission parts of the knife gate, and lubricating oil dry, resulting in operating torque increase greatly, porcelain by the large torque and twist off. The porcelain flange bonding being etched by wind and rain for a long time, and thermal expansion and contraction lead to fall off layer by layer. Such a vicious cycle, finally result in the insulator and the flange completely detachment out of the external force. Another reason is the improper adjustment of the balance spring.Actuator FaultMainly including mechanical failure and electrical failure. The mechanical failure including the mechanism being locked by grounding switch, and the screw nut can not reset result in the motor idling, etc. The electrical failure including the power circuit is obstruct, the breaker is in the closing state or conversion switch is not in place, the bus switch at both ends of the grounding switch is in the closing state, lead to unreasonable circuit control etc.Grounding Knife Gate EHV Operation DifficultyBefore the substation transformed, which is managed by the power transmission company of Hunan province, although a lot of grounding knife switch is single phase operation, it is still difficult. Switch can not be put in place, the vertical transmission rod even being twist off, and the gear of hand-operating mechanism would appear broken teeth. The main reason is that the manually operated mechanism of the grounding knife switch of the isolation switch is eroded by the wind and rain for a long time, and the rotating parts are not tightly sealed. Although being coated with grease, it forms a layer of dry hard layer with the rain, dust, rust and other effects together, the rotation shafts are bonded together, resulting in the difficulty of turning the shaft.SolutionThe Improvement of the Leading Electrical SystemThe respective conductive contact surfaces should be polished smooth, the fixed contact surfaces such as coated conductive paste clips should be coated with conductive paste, so that they can have a good contact; the conductive grease or neutral vaseline which is coating on the dynamic and static contact at the contact should be uniformly thin, otherwise it will stick dye dust easily and affect the contact. Note that when polishing silver layer can not be rubbed off too much of the silver layer and burning off should be re-processed silver.Increasing the Contact PressureWhen the switch is in the operation, rain cover become old and damaged, rain come into the internal conductive tube, internal clamping spring, spring pins rust, so that the spring will be reduced, cutting cylindrical pin, causing the movable contacts can not be clamped. Besides since the small wheel in the middle of the connecting fork wear severe deformation, also leads to a reduction of the clamping force. According to experience, the original cylindrical pin replaced within 8 plus a cylindrical pin 5; replacing the entire length of the spring clamp unqualified covers (The free length should be 340-t-5m/n ); replacing the wheel wear resistant composite wheel, so that it can be better.The Improvement of Operating MechanismThis type of knife was originally equipped with the type of CJ7 electric mechanism, the output shaft drives the rotary action of middle phase insulator by a double four agencies above the box. Since the many intermediate links and a large operating torque, the links always become twist. besides since the original screw nut dish stretch across the switch is not enough, the phenomenon of tripping and can not be reset often appears. We have carried out all the transformation of such institutions, instead CJ7B electric mechanism, increasing the intensity of the spring. After the closing minutes in place, then even if the screw nut separate from the screw can also be automatically reset. In addition, CJ7B electric mechanism main shaft rotated by the output rod drive493to reduce intermediate links output torque loss and increase reliability.The Improvement of Ground Switch Hand-operating MechanismChange the original type of CS17-1I hand-operating mechanism institutions to the type of CSB hand-operating mechanism of the base assembly use the patent products of the Changsha high voltage switch gear factory. The rotational parts of the improved new institutions become more flexible. The coupling between the mechanism spindle and the spindle switch use the mode of friction disc, the operating torque of which is large, after the transformation, the three-phase linkage operation of grounding switch mechanism has a smaller force than the original single-phase operation.References[1] Chen Shiqing. On the Condition-based Maintenance of Power Transformer [J]. Transformer.[2] Lu Jizhi. On the Condition-based Maintenance and Development of Electric Transmission and Transformation Equipment[J ].Yunan Electric Power.[3] Ma Jie. Carry out Equipment Condition-based Maintenance and Ensure the Safe Operation of Power Grid[J].Sci-Tech Information Development & Economy.[4] China Planning Press. Collaboration for the Construction and Acceptance Standard of Installation Project of Electrical Device [M].Beijing:China Planning Press.[5] Chemistry Standardization for Power Plant Technical Committee of Ministry of Electric Power Industry. Collaboration for the Standards of Quality and Test Method of Oil Used for Electric Power [M]. China Standard Press.494。
GW16型高压隔离开关运动机理及常见故障分析 陈泽昂
GW16型高压隔离开关运动机理及常见故障分析陈泽昂摘要:高压隔离开关是220kV变电站中普遍的一种电气设备,它具有将电气设备与运行中电网隔离、改变运行方式等作用。
GW16型高压隔离开关从20世纪80年代初至今已大量在电网中运行,其特点是单柱、垂直断口和折叠式分合。
由于结构上的不同,它的运行维护与其他型号的隔离开关相比有其自身的特点。
文章介绍了GW16型隔离刀开关运行机理,并该型号刀开关故障情况、原因剖析、处理过程和防范措施。
关键词:GW16型;高压隔离开关;运动机理;常见故障引言高压隔离开关是一种较简单的高压开关,它的用量很大,其基本作用就是在线路上没有电流的情况下,将电气设备和高压电源隔开或接通。
高压隔离开关质量的优劣、运行维护情况的好坏将在很大程度上决定电力系统的安全稳定运行与否。
因此,加强有关高压隔离开关开关故障处理的研究,对于改善电力系统的整体运行质量具有重要的现实意义。
一、高压隔离开关的结构组成高压隔离开关主要由支持底座、导电部分、绝缘子、传动机构以及操动机构这五部分所组成,以下分别就这些组成单位结构的作用进行说明:支持底座,该部分的主要作用是起支撑和固定作用;导电部分,主要包括触头、刀闸、接线座,其作用就是传导电路中的电流;绝缘子,主要包括支持绝缘子、操作绝缘子。
其作用是将带电部分和接地部分绝缘起来;传动机构,高压隔离开关中的传动机构就是用来接受操动机构的力矩,并通过拐臂、轴承、连杆、齿轮等将运动传给触头,从而完成隔离开关的分合闸动作;操动机构,该部分的作用主要是为分合闸提供能源。
二、GW16型隔离开关运动机理GW16型隔离开关主要由3个单极组成,极间用水平传动杆相连接,每组隔离开关配一台CJ7电动机操动机构,正常工作时采用电动机操动,检修、调试及事故状态时可采用操作手柄进行手动操动,同时,每极隔离开关可配1台或2台JW6-220接地刀开关和1台或2台CS17-Ⅰ手力操动机构,接地刀开关的分、合闸只能采用手动操动机构操作。
探讨变电站GW1617型隔离开关问题

探讨变电站GW16/17型隔离开关问题GW16/17隔离开关在实际运行与运用中可能会因为设计、工艺、材料以及外力作用等出现故障问题,影响其正常运转,对此需要找寻问题原因,并及时进行处理,以解决隔离开关运行中的问题,提高其运行效率。
1 GW16/17型隔离开关构造GW16/17隔离开关属于3级室外高压开关,当50Hz高压线路无载流时能够进行线路切换,同时也能隔离检修设备,具体的运转流程为:折叠与夹紧双重作用,具体的结构图如图1所示:2 变电站GW16/17型隔离开关存在问题2.1 导流系统接触面过热接触面过热主要指的是静触头温度过高,导致触头烧毁,夹板裂开,螺栓变松甚至脱落,铜铝过渡套也遭到灼烧,出现受损痕迹。
同时导入系统也由于温度较高,导致刀闸无法彻底闭合,使得动、静触头压力较低,接触面不够平顺,使得镀银层受磨、受损,甚至脱落。
触片、触头以及导电带无法紧密连接,接触面受腐蚀等。
2.2 操动机构故障所谓的操动机构故障则具体包括:机械与电气方面的故障,前者指的是刀闸机构或传动部件动作时卡涩或者由于螺母松动而出现电机无功转动;后者则通常是因为电源回路受阻,使得断路器走向合闸状态,出现控制回路阻滞现象。
2.3 绝缘瓷瓶断裂在对瓷瓶转动时,很容易出现断裂现象,出现这一问题的成因在于转动环节生锈或者缺少润滑油,从而导致瓷瓶遭受过大扭矩,出现断裂现象或者其法兰胶合位置由于长时间遭受雨水的侵蚀与浸泡,出现脱胶断裂现象,如果得不到有效维护,长期下去将造成绝缘子和法兰彻底分离开来。
2.4 转动部分腐蚀生锈区分于普通开关的是,GW16/17开关属于三相联动开关,连杆将三相连接为一体,形成联动。
电机凭借连带齿轮丝杆、螺母、拨叉等来对应调整法兰盘,逐渐降低机构的运行速度,同时把力矩向开关主轴传输,确保其发出动作。
然而由于安装技术达不到要求,使得转动瓷瓶与支持瓷瓶的位置出现偏差,无法达到规定的垂直标准,而且三相底座各处自己平面,或者连杆未能处于同一直线,强度达不到规定等级,或者因为操作力矩超出常规数值,接线底座位置的齿轮脱焊,出现这一问题主要是因为下导电杆中的平衡弹簧未能有效调节,压缩量较小,使得刀闸闭合过程中力矩变大。
长高GW16、17型隔离开关检修及维护导则
隔离开关检修及维护导则1、适用范围与引用文件1.1适用范围适用于电力系统220 kV ~550kV水平伸缩单臂折架式及垂直伸缩单臂折架式户外隔离开关的维护、检修工作。
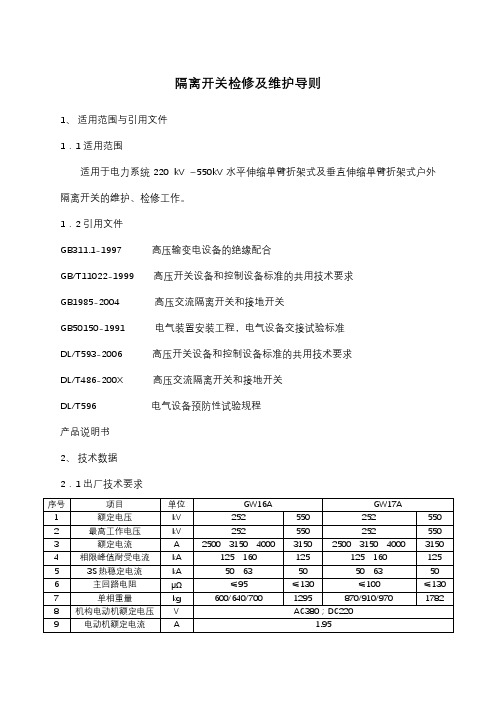
1.2引用文件GB311.1-1997 高压输变电设备的绝缘配合GB/T11022-1999 高压开关设备和控制设备标准的共用技术要求GB1985-2004 高压交流隔离开关和接地开关GB50150-1991 电气装置安装工程,电气设备交接试验标准DL/T593-2006 高压开关设备和控制设备标准的共用技术要求DL/T486-200X 高压交流隔离开关和接地开关DL/T596 电气设备预防性试验规程产品说明书2、技术数据2.1出厂技术要求2.2主要调试技术数据3、检修周期和项目3.1 检修周期3.1.1大修大修周期一般为5~6年3.1.2小修小修周期一般为2~3年3.1.3临时性检修临时性检修根据运行中出现的缺陷及故障性质进行3.2、检修项目3.2.1大修a.静触头装配检修b.上导电杆装配检修c.中间接头装配检修d.下导电杆装配检修e.接线底座装配检修f.接地闸刀装配检修g.转动瓷套、支持瓷套检查h.组合底座装配检修i.传动系统检修j.电动操动机构检修k.手力操动机构检修l.整体组装和调试m.检查和试验n.本体清扫和刷漆o.验收3.2.2小修a.根据运行中发现的缺陷进行处理b.检查动、静触头接触情况c.检查橡皮垫和玻璃纤维防雨罩的密封情况d.检查导电带与动触头片及动触头座的连接情况e.测量隔离开关主闸刀和接地闸刀主回路的回路电阻f.清扫及检查转动瓷套和支持瓷套g.检查(或紧固)所有外部连接件和轴销和螺栓h.检查接地闸刀与主闸刀的联锁情况i.清扫及检查操动机构、传动机构,对齿轮等所有有相对运行的部分添加润滑油,并进行3~5次动作试验,以检查其灵活性及同期性,配合调整辅助开关及微动开关的动作情况,用手动检查操动机构,检查丝杆与丝杆螺母在分闸与合闸终了位置时的脱扣与入扣情况,以保证丝杆螺母能够灵活自如地在丝杆上运动j.检查机构箱内端子排、操作回路连接线的连接情况及机构箱门的密封情况,测量二次回路的绝缘电阻k.检查机构箱、接地装置、基础地脚螺栓等的紧固情况3.2.3 临时性检修临时性检修项目应根据具体情况确定4、大修前的准备4.1检修工具a.常用工具套筒板手、开口板手、虎口钳、300N.m以下的扭矩板手、螺丝刀、水平仪及直尺筒式弹簧秤b.专用工具详见附录C GW16A/17A-252/550型隔离开关检修专用工具4.2耗材准备详见附录B 表一GW16A/17A-252/550隔离开关大修材料消耗明细表按此表准备耗材4.3修前准备工作a.根据运行、试验发现的缺陷及上次检修的情况,确定重点检修项目b.组织人力,安排施工进度,制订并组织讨论学习大修的安全、技术措施c.准备工具、材料、备品配件、试验仪表和仪器等,并运至检修现场d.准备有关检修技术资料、记录和检修报告e.按《电业安全工作规程》的规定,办理工作标许可手续,交代现场安全注意事项4.4检修工作流程4.4.1小修工作流程4.4.2大修工作流程4.5停电后外部检查、测试a.根据存在的问题检查有关部位b.进行分、合闸操作(包括手动和电动),观察动作情况,并做好记录c.进行检修、解体前的测量(根据需要确定测量项目)5检修工艺及质量标准5.1本体部件的拆卸5.1.2本体的拆卸a. 对GW16A产品在合闸位置时,打开下导电杆外壁平衡弹簧调整窗盖板,将下导电杆内平衡弹簧完全放松,对GW17A产品在分闸位置时放松平衡弹簧;b. 断开操作电源;c. 使隔离开关主闸刀处于分闸位置,拆下引线;d. 用铁丝将上导电杆和下导电杆两端头捆在一起,捆3~4圈;e. 用吊装绳捆住主闸刀,使主闸刀重心基本处于平衡状态,并用起吊工具将吊装绳拉紧,使吊装绳受微力,要求捆绑牢固,防止在吊下主闸刀时损坏瓷套;c. 手动缓慢分闸.d. 捆扎牢固.e. 吊装绳应经事先检查,无散股、断股,截面符合起吊重量要求,捆绑牢固、平衡.f. 拆卸与吊下时应防止支持瓷瓶与旋转瓷瓶倒下及相互碰撞,可用绳子或其他专用工具将其拉紧、固定.g. GW16-252A固定在检修平台上,其上下导电杆伸直后应该与地面垂直,而不能呈水平状态.h. 捆绑牢固,吊下时防止瓷瓶损坏,瓷瓶吊至地面后倒放在草垫上。
GW16、17型隔离开关说明

GW16、17-252 型断绝启闭的使用之阳早格格创做证明:由于GW16型战GW17型的产品结媾战动做本理相共,底下以GW16型为例举止介绍1 概括1.1 产品用途GW16-252 型单柱笔曲断心断绝启闭(以下简称断绝启闭)是供220kV 下压线路正在无载流情况下举止切换战对付被检建的下压母线及其余电气设备与戴电线路举止电气断绝的三极户中下压电器.本断绝启闭具备载流本领大、占大天积小等特性,是220kV电站中出进线互为90安插时的一种理念的断绝启闭,它结构紧稀、疏通部分稀启良佳,果此,普遍很少需要检建.1.2 操效果构型号每一组断绝启闭配一台CJ7A型电动操效果构,附拆的交天启闭配CSC型人力操效果构.1.3 产品主要规格本产品规格有二种:出有交天、交天.1.4 有闭板滞安排参数1.4.1 断绝启闭主回路(从下交线板至静触杆)电阻,出有大于95;1.4.2 交天闸刀主回路(从下部硬连交终端至交天静触头处)电阻,出有大于2501.4.3 断绝启闭断心最小气氛绝缘距离:2.6m;1.4.4 断绝启闭对付天最小气氛绝缘距离:2.0m;1.4.5 断绝启闭三极合闸共期性出有大于:20mm;1.4.6 交天启闭三极合闸共期性出有大于:15mm;2 产品结媾战处事本理2.1 产品结构本断绝启闭结构形状睹左图,主要由底座拆置、绝缘子、主闸刀系统、交天启闭系统等组成.2.1.2 断绝启闭主闸刀的结构睹图2 2.2 处事本理本断绝启闭的疏通历程是由二部分疏通复合而成的,即合叠疏通战夹紧疏通.合叠疏通:由CJ7A型机构启动转化瓷瓶做火仄转化,与转化瓷瓶贯串的一对付伞齿轮戴动仄里单四连杆疏通,进而使下导电管顺时针转化合闸,顺时针转化分闸;由于安排螺杆拆置与下导电管的铰交面分歧,进而使与安排螺杆拆置上端铰交的支配杆相对付于下导电管做轴背位移,而支配杆的上端与齿条固连,那样齿条的移动便推动齿轮转化,进而使与齿轮轴固连的上导电管相对付于下导电管做伸曲(合闸)或者合叠(分闸)疏通;其余,正在支配杆轴背位移的共时,仄稳弹簧按预约的央供储能或者释能,最大极限天仄稳刀闸的沉力矩,以好处刀闸的疏通.夹紧疏通:断绝启闭由分闸位子背合闸目标疏通的历程中,并正在交近合闸位子(快要伸曲)时,滚轮启初与齿轮箱上的斜里交触,并沿着斜里继承疏通.于是,与滚轮相联的顶杆便克服复位弹簧的反效率力背前推移,共时动触头座内的对付称式滑块删力机构把顶杆的推移疏通变换成触指的相对付钳夹疏通.当静触杆被夹住后,滚轮继承沿斜里上移3~5mm,曲至真足合闸,此时夹紧弹簧的力已效率正在顶杆上.正在那个历程中,由于顶杆被安排成推压柔性杆,故本已预压缩的夹紧弹簧被第二次压缩,并效率正在顶杆上,使得顶杆赢得一个宁静的推力,进而使触指对付静触杆脆持一个稳当出有变的夹紧力.当启闭启初分闸时,滚轮沿斜里背中疏通,曲到摆脱斜里.此时,正在复位弹簧的效率下,顶杆戴动触指弛启呈“V”形.2.2 交天启闭的结构及处事本理交天启闭结构睹图4,其疏通历程是靠人力机构通过一套四连杆变换后,戴动交天底座上的主动臂转化,由于主动臂与门形支架战交天刀管是按安排央供组成的一套特殊的四连杆系统,进而包管了交天闸刀正在合闸历程中,先做转化,正在交近合闸位子时,曲线进与疏通,拔出到静触头内.分闸反之.3 断绝启闭的安排3. 1 主刀边极分合闸出有到位可安排边拐臂及火仄连杆少短.3.2 分合闸共期安排安排边拐臂及火仄连杆少短.3.3 下导电管出有曲安排主刀底座拆置中二推杆少短.3.4 上导电管出有曲安排下导电管拆置拔出齿轮箱的深度.4 断绝启闭大概出现的障碍本果及处理要领(详睹附录)5 拆置及检建后的查看战查支5.1 目测主闸刀正在合闸位子应横曲成背去线.5.2 主闸刀合闸后,动触片的八个交触面,均应与静触杆交触良佳.5.3 主闸刀断心距离出有小于2600mm;交天刀断心距离出有小于2000mm.5.4 查看主闸刀的三极合闸共期性出有大于20mm丈量要领:当任一极的二侧动触片均与静触杆交触时,丈量其余二极动、静触头间距离L1、L2(睹图10 c),且½ (L1+L2)≤20mm.5.5 查看交天刀的三极合闸共期性出有大于15mm查看要领:当任一极的动、静触头刚刚交触时,丈量其余二极动、静触头的距离出有大于15mm.3.6 交天刀合闸后,刀头拔出静触头深度为40 +10mm.5.7 交通电源,对付电效果构分别施加100%、85%、110%额定电压,并分别举止三次分、合闸支配,分、合闸位子应精确.5.8 用人力机构操动交天启闭动做时,效率正在脚柄上的力应出有大于200N.5.9 用电压落法检测断绝启闭战交天启闭的总回路电阻应出有大于95战250.5.10 查看断绝启闭与交天启闭是可能真止稳当的板滞联锁及电磁锁的动做是可稳当.5.11 查看齿轮箱拆置中支轴是可随主闸刀疏通而转化.3.12 查看所有轴销及有相对付疏通的部位是可涂润滑脂,螺栓是可紧固.6 维建该产品的主闸刀,由于其疏通部分均拆正在导电管内里,稀启较佳,故普遍很少需要检建,但是各连交轴销则曲交表露正在气氛中,果此,应注意定期涂二硫化钼.维建时应注意如下事项:正在拆置整件历程中,需记录各部件间的相互位子,尺度件的规格免得沉新拆复时爆收过失.建后拆复时,所有相对付疏通部分皆应涂二硫化钼.所有铝与铝交触的导电里,由于氧化极快,故应先涂一层凡是士林油,用砂纸或者钢刷按网格办法往复摩揩(去掉氧化层),用布揩去油污,而后沉新涂上薄薄的一层凡是士林油,并坐时用螺栓紧固其连交件.7 断绝启闭螺栓力矩值(仅供参照)GW16\17型下压断绝启闭的使用维护战障碍处理一、产品的使用与维护断绝启闭静触头受风力、气温、冰冻等环境的效率,使其正在空间的位子变更较大,果此,用户应付于母线采与适合步伐,如采与硬母线、删大母线弛力、缩小母线挡距等,使静触头正在百般恶劣气候条件下的变动范畴出有超出触头的确定交触天区.断绝启闭正在检建后加进使用之前,除对付主闸刀战交天闸刀按确定举止查看中,出有要举止以下查看,待决定仄常后,圆可加进仄常运止.①正在脚力支配分、合历程中,用脚感觉支配力应匀称减少或者缩小(以主刀下导电管内仄稳弹簧启初储能或者启初释搁能为界限),且分、合闸支配力应基础普遍.②正在分、合闸位子时,机构终面位子与辅帮启闭交面位子应精确,并能仄常切换.③交线端子应与母线连交良佳.加进运止后,断绝启闭必须正在线路背载切断后圆可举止支配.本产品由于正在传动处多采与复合轴套,有较佳的“自润滑性”,共时,主闸刀的传动部件拆导电管内,稀启良佳,故普遍很少检建,但是由于部分连交轴销、尺度件等裸露正在气氛中,果此对付断绝启闭及支配机构仍需定期举止查看战维护.主要注意以下几面:①浑理瓷瓶表面污秽,檫洁触头交触表面并涂红色凡是士林.②所有传动、转化部件应加润滑油举止润滑.③查看所有紧固件,如圆柱销、螺母等是可有紧动局里.④主刀及天刀是可疏通仄常,触头交触是可良佳.⑤正在分、合闸位子时,三极是可共期,机构中辅帮交面是可稳当,切换仄常.定期大建时应注意以下事项:①正在拆置历程中,要记录各整件的互相位子,尺度件的规格.②拆置时,应先挨启下导电管中壁的窗心盖板,使下导电管内的仄稳弹簧完齐搁紧,免得弹簧效率使闸刀弹启伤人.拆置导电管时,需用斜铁将有闭整件的缺心楔启,拆下定位螺塞,而后拆下导电管.当需要与下弹性圆柱销时,可用冲子冲出,若一处有二个弹性圆柱销时,应先与出内里的,而后再与出表里的.注意:拆置时出有要碰打导电交触里战镀银层.拆复时,所有疏通部位均应涂润滑油,导电里涂红色凡是士林,对付铝与铝交触的非镀银导电里,由于氧化极快,故应先涂红色凡是士林,用钢刷按网格办法往复磨檫,而后用搞洁的布檫洁,再赶快涂上一层红色凡是士林,并坐时拆置.二、罕睹障碍的分解与处理要领1、动触片与静触杆交触出有良.爆收本果:①动触片的四个触面与静触杆出有服止.②动触片变形.处理要领:对付第①种情况,办理要领有三种(一)紧启上导电管与动触头拆置之间的紧固螺栓及定位螺塞,视简曲情况沉微转化一下动触头座拆置,而后拧紧各螺栓.(二)可通过安排静触杆去真止动、静触头的稳当交触.(三)安排动触片,使每侧的二个动触片的四个电交触里正在共一仄里内.对付第②种情况,调换动触片.2、断绝启闭当主闸刀合闸结束时,动、静触头之间的交触压力出有敷或者无夹紧力.爆收本果:①上导电管拆置中的支配杆少度尺寸短.②上导电管少度尺寸少.③中间的滚子曲径较小.④静触头导电杆曲径较小.处理要领:针对付第①、②种情况可紧启中间交头拆置与上导电杆拆置贯串的定位螺栓及紧固螺栓,将上导电管背连交叉里插进一些,再举止拆复.对付第③种情况可调换新滚子,滚子中径为Φ30.对付第④种情况可采与中径为Φ40的静触杆.3、启闭处正在合闸位子时,下导电杆处于笔曲(GW16型)或者火仄(GW17型)位子,而上导电杆出有笔曲或者出有火仄.爆收本果:主宰电系统内的齿条与齿轮啮合出有精确.处理要领:①当下导电杆笔曲或者火仄而上导电杆背分闸目标倾斜时,可紧启中间交头拆置的齿轮箱与下导电杆拆置贯串的紧固螺栓及定位螺栓,将齿轮箱沿下导电杆目标背下滑移1—4mm,倾斜宽沉的可将齿轮箱与下,沉新挂齿并加以安排,使上、下导电杆成背去线,并将紧固螺栓及定位螺塞拧紧.②当下导电杆笔曲或者火仄而上导电杆背合闸目标倾斜时,可紧启中间交头拆置的齿轮箱与下导电杆拆置贯串的紧固螺栓及定位螺塞,将齿轮箱沿下导电杆目标进与滑移1—4mm,倾斜宽沉的可将齿轮箱与下,沉新挂齿并加以安排,使上、下导电杆成背去线,并将螺栓及定位螺塞拧紧.4、启闭处正在合闸位子时,上、下导电杆成背去线,但是真足出有正在铅垂(GW16型)或者火仄(GW17型)位子.爆收本果:交线底座拆置安排推杆少度安排出有当.处理要领:紧启安排推杆上的锁紧螺母,适合搁少或者支缩安排推杆的少度.注意:一定要使二安排推杆少度相等,并将锁紧螺母拧紧.5、断绝启闭正在调试时,单极分、合闸力矩之好大于30Nm.爆收本果:下导电管内仄稳弹簧压缩量安排出有当.处理要领:GW16—252正在分闸历程中,仄稳弹簧渐渐保存能量(弹性势能),正在合闸历程中弹性势能逐步被释搁.当合闸力矩大,分闸力矩小时,可将安排螺母顺时针转化,使仄稳弹簧的储能减少,进而适合减小合闸力矩,共时减少分闸力矩,以达到分、合闸力矩基础仄稳之脚段.反之,若合闸力矩小而分闸力矩大时,安排要领与以上好异.GW17—252正在合闸历程中,仄稳弹簧渐渐保存能量,正在分闸历程中弹性势能逐步被释搁.当分闸力矩大,合闸力矩小时,可将螺套顺时针转化,使仄稳弹簧的预压力删大,即弹簧储能减少,进而适合减小分闸力矩,共时减少合闸力矩,以达到分、合闸力矩基础仄稳之脚段.反之,分闸力矩小而合闸力矩大,安排要领与以上安排要领好异.6、本产品正在三极联动时,主极的分、合闸仄常而一边极合闸越位但是分闸出有到位,另一边极分闸越位但是合闸出有到位.爆收本果:三极火仄推杆少度安排出有当.处理要领:最先应适合安排三极火仄推杆的少度,普遍能达到脚段.但是偶尔会出现某一边极分、合闸均出有到位的局里,那时,通过支缩该极拐臂的少度去安排.简曲安排要领为:紧启牢固拐臂及推板的螺栓,将推板沿拐臂背里做适合安排,并协共安排该极三极火仄连杆,以达到战主极共期的脚段.此时也大概会出现某一边极分、合闸均过位的局里,那时通过删少该极拐臂的少度去安排,简曲要领与以上好异.7、该断绝启闭正在三极联动安排时,其主极能分、合闸到位,而二边极分、合闸均出有到位.爆收本果:二边极拐臂少度安排出有当处理要领:共本章第6条.8、该断绝启闭所配交天刀,支配时分、合闸力矩较大.爆收本果:①支配机构的输出轴的轴线与交天启闭的传动轴的轴线出有正在一条曲线上,既贯串交时对付中缺面较大.②交天启闭自己拆置出有良,出按确定涂润滑油,拆置闭系有误等.③支配机构自己拆置出有良,列如转化部位卡滞,出按确定涂润滑油,以至拆置闭系过失等.④交天启闭安排出有到位,如仄稳弹簧安排出有当等.⑤静触头拆置安排出有当.处理要领:针对付第①种情况,安排支配机构的拆置位子,包管支配机构的输出轴核心线到前提核心距414mm及320mm;对付第②、③种情况,决定本果后可参照相闭结构图举止处理或者沉新举止拆拆;对付第④种情况,沉新安排交天启闭战仄稳弹簧;对付第⑤种情况安排静触头拆置的拆置位子,使天刀能成功拔出静触头. 9、断绝启闭所配交天刀正在三极联动支配时,分、合闸均出有到位.爆收本果:①支配机构的输出角度出有敷.②拐臂或者火仄连杆少度安排出有当.处理要领:针对付第①种情况,如支配机构为CSA脚力机构时,可紧启减速箱上端紧固偏偏心定位套的螺栓,安排偏偏心定位套,进而可删大支配机构的输出角度,若支配机构为CJ7A电效果构时,可将路程启闭背二端适合移动,共时支缩拨叉上二限位螺栓少度,共样不妨删大支配机构的输出角度,以真止天刀分、合闸到位;对付第②种情况,可将交天刀主极拐臂适合搁少,简曲要领是,搁紧M18螺母,将齿板沿拐臂适合中移,加大主动拐臂的转化角度,并协共安排安排螺杆及极间火仄连杆的少度,共时适合安排边极拐臂,使交天刀分、合闸到位,并包管三极共期.10、交天刀正在三极联动时,主极的分、合闸不妨谦脚央供,而一边极合闸越位,分闸出有到位,而另一极则好异.爆收本果:拐臂或者安排推杆安排出有当处理要领:基础战本章第6条及第9条②的处理要领类共.11、断绝启闭正在合闸历程中,偶尔会出现动触头疏通轨迹成蛇止,即动触头背合闸目标疏通的共时,陪随安排晃动.爆收本果:中间交头内的齿轮与齿条啮合出有稳.处理要领:正在分闸状态,紧启中间交头拆置与下导电管拆置贯串的紧固螺栓及定位螺塞,而后将中间交头拆置沿导电管轴线按顺时针战顺时针目标适合转化,使齿轮与齿条啮合稳当,再把紧固螺栓及定位螺塞紧固.12、断绝启闭正在合闸时主极B极战一边极(假设是A极)合闸仄常,但是另一边极C极合闸明隐滞后,分闸时,C极明隐超前于A、B极,当C极分闸到位时,A、B极仍正在背分闸目标疏通,当A、B二极分闸到位时,C极已越太过闸仄常位子,处正在半分半合位子(C极疏通到分闸位子时突然反弹)共时C极拐臂已过“死面”.爆收本果:C极拐臂的初初角度分歧过失,也便是该拐臂战火仄连杆的夹角与A、B二极分歧,且出进较大.处理要领:将C极火仄连杆与拐臂贯串的螺栓紧启,注意紧螺栓之前用绳子系住火仄连杆将要紧启的一端,免得益伤火仄连杆.而后缓缓天转化转化瓷瓶(按合闸的转化目标转化),使过“死面”的拐臂回复到仄常位子.若那样安排出有克出有及使拐臂回复到仄常位子,可将拐臂与连杆相联的弹性圆柱销挨掉,使连杆与该拐臂摆脱,再转化转化瓷瓶,使拐臂回复到仄常位子,将拐臂与连杆沉新联佳.将C极拐臂的初初角度安排到A、B二极相共,即A、B、C三极拐臂火仄连杆的夹角相共,再将火仄连杆与拐臂沉新联佳.13、正在北圆热热的天气,GW17型产品若万古间处于分闸状态,当举止合闸时,大概会出现合出有上的局里.爆收本果:产品调养出有擅或者检建出有真足,以致部单干件稀启短佳,万古间处于分闸状态,上导电管拆置内里积火结冰,夹紧弹簧及复位弹簧等工件出有克出有及仄常处事,引导断绝启闭出有克出有及合闸.处理要领:将上导电管拆置解体,用启火与消结冰,再将各工件烘搞(注:烘搞时出有克出有及益害产品工件)而后再检建并拆复.14、CJ7A机构丝杠螺母与丝杠脱扣后,当电效果反转时,丝杠螺母出有克出有及成功与丝杠啮合.爆收本果:①丝杠螺母与丝杠的螺纹变形.②丝杠螺母与丝杠的螺纹起初位子沉微变形或者螺纹起初部位倒角磨益.③碟型弹簧弹力缺累.处理要领:针对付第①种情况,需调换丝杠战丝杠螺母;对付第②种情况,需将螺纹倒角处举止钳建,将沉微变形部分去掉,共时将丝杠战丝杠螺母螺纹起初部位内侧倒角,并去除螺纹起初部位的尖角.对付第③种情况,当该机构配GW17型产品时可调换或者减少碟型弹簧.当该机构配GW16型产品时,除调换蝶型弹簧中,也可将缓冲垫螺杆适合支缩,适合减少产品分闸路程,即减少CJ7A机构输出角度,那样可删大机构的叉杆焊拆的转化角度,采与以上步伐,可使丝杠螺母不妨成功天与丝杠啮合.(完)。
GW16、17、JW6样本 定稿
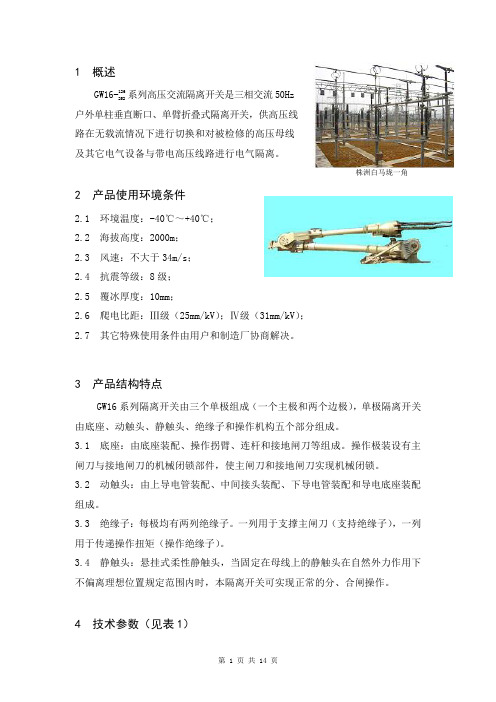
1 概述GW16-126系列高压交流隔离开关是三相交流50Hz252户外单柱垂直断口、单臂折叠式隔离开关,供高压线路在无载流情况下进行切换和对被检修的高压母线及其它电气设备与带电高压线路进行电气隔离。
株洲白马垅一角2 产品使用环境条件2.1 环境温度:-40℃~+40℃;2.2 海拔高度:2000m;2.3 风速:不大于34m/s;2.4 抗震等级:8级;2.5 覆冰厚度:10mm;2.6 爬电比距:Ⅲ级(25mm/kV);Ⅳ级(31mm/kV);2.7 其它特殊使用条件由用户和制造厂协商解决。
3 产品结构特点GW16系列隔离开关由三个单极组成(一个主极和两个边极),单极隔离开关由底座、动触头、静触头、绝缘子和操作机构五个部分组成。
3.1 底座:由底座装配、操作拐臂、连杆和接地闸刀等组成。
操作极装设有主闸刀与接地闸刀的机械闭锁部件,使主闸刀和接地闸刀实现机械闭锁。
3.2 动触头:由上导电管装配、中间接头装配、下导电管装配和导电底座装配组成。
3.3 绝缘子:每极均有两列绝缘子。
一列用于支撑主闸刀(支持绝缘子),一列用于传递操作扭矩(操作绝缘子)。
3.4 静触头:悬挂式柔性静触头,当固定在母线上的静触头在自然外力作用下不偏离理想位置规定范围内时,本隔离开关可实现正常的分、合闸操作。
4 技术参数(见表1)5 工作原理5.1主刀闸折叠运动和夹紧运动。
5.1.15.1.2 夹紧运动:在接近合闸位置时,滚轮⒀开始沿着斜面运动,滚轮⒀销连的顶杆⒃便克服复位弹簧⒄的反作用力向上推移,动触头座⒅内的对称式滑块增力机构把顶杆⒃的推移运动转换成触指⒇的相对钳夹运动,当静触头装配⒆的静触杆被夹住后,滚轮⒀继续上移3mm~5mm,直至完全合闸,此时夹紧弹簧⒁的力作用在顶杆⒃上,由于顶杆⒃被设计成推压柔性杆,故原已预压缩的夹紧弹簧⒁被第二次压缩,并作用在顶杆⒃上,使得顶杆⒃获得一个稳定的推力,从而使触指⒇对静触杆保持一个可靠不变的夹紧力,分闸时,滚轮⒀沿斜面向外运动,直至脱离斜面,此时,在复位弹簧⒄的作用下,顶杆⑹带动触指张开呈“V”形。
简述关于GW16(17)-220型高压隔离开关存在问题和改进措施情况介绍
电子科技 C o n s u me r E l e c t r o n i c s Ma g a z i n e 2 0 1 3 年 1 1 月下
简述关于 G W1 6 ( 1 7 ) 一 2 2 0 型高压隔离开关存在问题和 改进措施情况介绍
魏 利 民
(内蒙古包头供 电局 ,内蒙古 包头 0 1 4 0 3 0 )
一
、
6/ 1 7 型隔离开关 由于 良好 的特性使其在高压系统中 有着广泛应用 。 ( 1 )载流 能力 大,外形 尺寸小,结构紧凑, 占地面积小 ; ( 2 )动触头与静触头接触 面积 大 ( 使用 于管母 线和软母线 ) ; ( 3 )采用钳式结构夹紧静触头,夹紧力可靠; ( 4 )机械性 能和导 电性能非常可靠; ( 5 )合 闸的可靠性: ( 6 ) 可靠的电接触 :圆锥 形触指的设计 ,保证了导电体在旋转过程 中 良好 的导 电特性。每一锥形触指配有一个独立弹簧 ,以保证 接触压 力。该结构能最大 限度减少短路 l 青况下的排斥力 ,并避 免了电流通过触指弹簧使弹簧发热, 良好的通风散热系统提高 了装置的散热性能。 二 、存在 问题 ( 一 )导 电系统接触面过热 。1 .触头发热 :主要有静触 头烧损 ,钢芯铝绞线散股 ,夹板 、夹块开裂 ,紧 固螺栓松动 , 铜铝过渡套损 伤。2 .主导 电系统过 热:刀闸合 闸不到位 ,导 致动 、静 触头接触 点压力不够 ,动、静触面 不平整 ,镀银 层 磨损 、脱 落;导 电带与触片 以及 动触头座之 间的连接 不紧、 接触面氧 化,导 电带折断严重 ,上 导 电管和动触 头底座接 触 面氧化 。中间接头 的转动触 头发热,弹簧开 裂变形 。触指 表 面镀银层 损坏 ,压 块损坏 ,接线 底座转动触 头装配处 发热 。 引线线夹和接线底座之 间的接触面松动 、氧化 。 ( 二 )转动 、传 动部分锈蚀 。复合轴套拐 臂的连接轴 销 处锈蚀 ,轴与铜套 之间为硬 性接 触,天长地 久,铜套与主 轴 之 间锈蚀 ,造成转 动困难 ,有 时在解体 时发现 开关安装 处涂 油不均匀 ,轴套磨损严重 。 ( 三 )操 动机 构故 障 。1 .机构 传动 轴 与辅助 开 关采 用 连杆连 接 ,有时传动角度 不够 , 接 点接触不 良, 造成 不能分 、 合 闸 ;2 .辅助 开 头质量 差 ,触头 生锈 造成 接 触不 良,使 隔 离开 关不能分 、合 闸;3 .操作 电源 回路 、 电源保 险烧 坏等 ; 4 .分 、合 闸止位 接 点设计 不合 理 ,材 质 差, 到位后 不 能可 靠切 换,使分 、合 闸回路 不通 。 ( 四)绝 缘瓷瓶断裂 。主要是转动 瓷瓶断裂 比较 多见 , 也有支持 瓷瓶 断裂现象 。 ( 五 )接 地刀 闸操作 困难 。我局在 改造 前 ,很 多接 地刀 闸尽管是单相操 作,仍 十分费力,分 合闸不到位。 三、采取 的改进方案 ( 一 )主 导电系统 的改造 。1 .对导 电接触面 打磨平整 , 固定接触面如线夹处 ,涂导电膏,使之接触 良好 。动、静触头 接触处涂导 电膏或者 中性凡士林 ,但不能涂太多 ,以均匀薄层 为好 ,否则容易沾染灰尘,影 响接触。打磨 时要注意不要将镀 银层 磨去太多 ,对镀银 层烧损脱落 的应 重新镀银处理 。2 . 增 加接 触压力 。由于开关在运 行 中防雨 罩老化破损 ,雨 水进入 导 电管 内部,使 内部夹紧弹簧 、弹性圆柱销锈蚀 ,使弹簧 的压 力减少,圆柱销被切断 ,导致动触头无法夹紧 。另外 由于连接 叉 中间的小滚轮磨损严重变形 ,也会导致加紧力 的减少。根据 现场 的检 修经验,将 6弹性 圆柱 销换成 4 ,8弹性 圆柱销 内加
GW16户外高压交流隔离开关

三、技术参数表:
Hale Waihona Puke 二、产品特点:• GW16-252型单柱垂直断口隔离开关,此开 关是供220kV高压线路在无载流情况下进行切换 和对被检修的高压线路及其他电气设备与带电线 路进行电气隔离的三极户外高压电器。本隔离开 关具有载流能力大,占地面积小等特点,是 220kV电站中进出线互为90°布置时一种理想的 隔离开关,它结构紧凑,运动部分密封良好,因 此一般很少需要检修。底座采用热镀锌,标准件 采用不锈钢或热镀锌,转动部位采用无油轴承; 关键部件采用不锈钢材料或渗锌防腐工艺,保证 产品长期运行的可靠性。
GW16-252户外高压交流隔离开
一、概述:
• GW16-252户外高压交流隔离开关是一种在电力系 统中无载的情况下,分合电力线路和设备的电气 设备,广泛用于电力系统和工矿企业。产品的各 项指标符合GB1985《交流高压隔离开关和接地开 关》、DL/T593《高压开关设备的共用订货技术导 则》、DL486《交流高压隔离开关订货技术条件》 的要求。
GW16、17型隔离开关说明
.GW16、17-252 型隔离开关的使用说明:由于GW16型和GW17型的产品结构和动作原理相同,下面以GW16型为例进行介绍1 概述1.1 产品用途GW16-252 型单柱垂直断口隔离开关(以下简称隔离开关)是供220kV 高压线路在无载流情况下进行切换和对被检修的高压母线及其它电气设备与带电线路进行电气隔离的三极户外高压电器。
本隔离开关具有载流能力大、占地面积小等特点,是220kV电站中进出线互为90布置时的一种理想的隔离开关,它结构紧凑、运动部分密封良好,因此,一般很少需要检修。
1.2 操动机构型号每一组隔离开关配一台CJ7A型电动操动机构,附装的接地开关配CSC型人力操动机构。
1.3 产品主要规格本产品规格有两种:不接地、接地。
1.4 有关机械调整参数1.4.1 隔离开关主回路(从下接线板至静触杆)电阻,不大于95;1.4.2 接地闸刀主回路(从下部软连接末端至接地静触头处)电阻,不大于2501.4.3 隔离开关断口最小空气绝缘距离:2.6m;1.4.4 隔离开关对地最小空气绝缘距离:2.0m;1.4.5 隔离开关三极合闸同期性不大于:20mm;1.4.6 接地开关三极合闸同期性不大于:15mm;2 产品结构和工作原理2.1 产品结构本隔离开关结构外形见右图,主要由底座装配、绝缘子、主闸刀系统、接地开关系统等组成。
2.1.2 隔离开关主闸刀的结构见图22.2 工作原理本隔离开关的运动过程是由两部分运动复合而成的,即折叠运动和夹紧运动。
折叠运动:由CJ7A型机构驱动旋转瓷瓶作水平转动,与旋转瓷瓶相连的一对伞齿轮带动平面双四连杆运动,从而使下导电管顺时针转动合闸,逆时针转动分闸;由于调整螺杆装配与下导电管的铰接点不同,从而使与调整螺杆装配上端铰接的操作杆相对于下导电管作轴向位移,而操作杆的上端与齿条固连,这样齿条的移动便推动齿轮转动,从而使与齿轮轴固连的上导电管相对于下导电管作伸直(合闸)或折叠(分闸)运动;另外,在操作杆轴向位移的同时,平衡弹簧按预定的要求储能或释能,最大限度地平衡刀闸的重力矩,以利于刀闸的运动。
GW1617252型隔离关的检修培训资料
GW1617252型隔离关的检修培训资 料
概述
• 概述 • 1.1 产品用途 • 1.2 操动机构型号 • 1.3 产品主要规格 • 1.4 有关机械调整参数 • 2 产品结构和工作原理 • 2.1 产品结构 • 2.2 工作原理 • 2.3 接地开关的结构及工作原理
PPT文档演模板
GW1617252型隔离关的检修培训资 料
PPT文档演模板
GW1617252型隔离关的检修培训资 料
• 2.3 接地开关的结构及工作原理
• 接地开关结构见图4,其运动过程是靠人力机构通 过一套四连杆转换后,带动接地底座上的主动臂 转动,由于主动臂与门形支架和接地刀管是按设 计要求组成的一套特殊的四连杆系统,从而保证 了接地闸刀在合闸过程中,先作转动,在接近合 闸位置时,直线向上运动,插入到静触头内。分 闸反之。
PPT文档演模板
GW1617252型隔离关的检修培训资 料
具体故障表现为以下几点;
• 1、刀闸三相同期差别较大 • 2、合闸后上、下导电杆不垂直 • 3、整个导电杆倾斜 • 4、导电接触不良,发热 • 5、刀闸双四连杆不过死点 • 6、刀闸合不到位,机构已经限位 • 7、刀闸分不到位,机构已经限位 • 8、刀闸已经合到位,机构还在继续运行, • 9、地刀杆上翘 • 10、地刀合不到位,卡涩 • 11、地刀动静触头不对中 • 12、地刀合闸力太大 • 13、刀闸拒分 • 说明:由于GW16型和GW17型的产品结构和动作原理相同,下面以 • GW16型为例进行介绍
PPT文档演模板
GW1617252型隔离关的检修培训资 料
• 夹紧运动:隔离开关由分闸位置向合闸方向运动的过程中, 并在接近合闸位置(快要伸直)时,滚轮开始与齿轮箱上的 斜面接触,并沿着斜面继续运动。于是,与滚轮相联的顶 杆便克服复位弹簧的反作用力向前推移, 同时动触头座 内的对称式滑块增力机构把顶杆的推移运动转换成触指的 相对钳夹运动。当静触杆被夹住后,滚轮继续沿斜面上移 3~5mm,直至完全合闸,此时夹紧弹簧的力已作用在顶 杆上。在这个过程中,由于顶杆被设计成推压柔性杆,故 原已预压缩的夹紧弹簧被第二次压缩,并作用在顶杆上, 使得顶杆获得一个稳定的推力,从而使触指对静触杆保持 一个可靠不变的夹紧力。当开关开始分闸时,滚轮沿斜面 向外运动,直到脱离斜面。此时,在复位弹簧的作用下, 顶杆带动触指张开呈“V”形。
GW16--220隔离开关动作原理及检修工艺

GW16/17-252型隔离开关检修工艺导则目录前言1、结构和原理1.1 主闸刀的结构及工作原理1.2 接地闸刀的结构及工作原理1.3 操动机构的结构及工作原理2、技术数据2.1 GW16/17-252型隔离开关及其操动机构出厂技术数据2.2隔离开关主要调试数据3、检修周期和项目3.1 检修周期3.2 大修项目3.3 小修项目4、检修前工作4.1 检修前的准备4.2 检修前的外部检查5、检修工艺和质量标准5.1 本体及静触头装配的拆卸5.2 静触头装配检修5.3 主闸刀系统检修5.4 接地刀闸装配检修5.5转动瓷瓶和支持瓷瓶检修5.6 传动系统检修5.7 CJ7A电动机构检修6、安装与调试6.1 静触头安装与调试6.2底座装配安装与调试6.3转动、支持瓷瓶安装与调试6.4主闸刀安装与调试6.5CJ7A型电动机构安装与调试6.6三极的联接和调试6.7隔离开关安装后的检查与验收7、结尾工作8、常见故障及处理附图:图1主闸刀结构原理图(GW16-252)图2图3……附录一GW16/17-252型隔离开关大修报告附录二平高电气股份有限公司GW16/17-126型隔离开关主要技术参数附录三长沙高压开关有限公司GW16A/17A-252型隔离开关技术数据前言高压隔离开关是用来分合无载流的高压设备或电路,特别是用以配合高压断路器完成倒闸操作任务的高压电器设备。
在合闸状态时起到导电并输送电能的功能,在分闸状态时起到安全隔离的作用。
在电力系统的正常运行、倒闸操作和变电检修中起重要作用,而且运行数量相当多,其质量优劣直接影响到系统的安全运行。
在隔离开关多年的运行中,曾暴露了很多缺陷,发生过各种类型的故障。
有些故障如拒动等使系统的运行方式受到限制,还有些故障扩大为重大事故,造成极大的经济损失和严重的社会影响。
有资料介绍,在2001年全国电力系统高压开关工作会议上,讨论和分析了高压隔离开关近年来的运行情况和存在问题,大致归结成四个方面的问题:一是触头过热;二是瓷瓶断裂;三是运动卡滞;四是分合闸不到位。
长高GW17型隔离开关调试流程
第一章长高GW17型隔离开关调试流程先主刀,再静侧地刀,最后动侧地刀一、解除接地刀对主刀的闭锁,方法:1、在分位附近,抱紧#1接地刀机构抱夹(不用打力矩);2、放长#1接地刀单相小连杆使闭锁板翘起,不能闭锁主刀;3、脱开#2接地刀齿板,缩短底座上不锈钢闭锁杆,调节静侧地刀相间连杆,使得三相凹槽对准,使之不能闭锁主刀。
二、主刀调整1、配合机构排故,松开主刀机构抱夹;2、在主刀分位,检查三相导电底座拐臂位臵,正确的位臵是拐臂的圆心正好在连杆下沿,如不在正确位臵,则记住,调整相间连杆;3、调整双连杆的长度约为84mm,同时调节死点止钉高度,正确的高度止钉螺帽高于导电座平面一个螺帽高度;4、用人力推拉导电臂,使主刀动、静触头约200mm,检查触头对中情况,如不合格,松开支持瓷瓶紧固螺栓后调节,使动静触头中心对准。
5、将主刀推至分闸位臵后下平台;6、调整相间连杆,使三相导电底座拐臂位臵一致;7、机构电动分闸,紧固抱夹抱紧垂直连杆;8、手动合闸至动静触头刚接触,检查动静触头对中(相差小:调节静触头侧;相差大:调节动触头侧);9、合闸到位后检查插入深度,调导电臂水平(下导电臂可以在合闸位调整,上导电臂需分闸至半分半合后调整)。
10、再次合闸,听三相过死点声音,调节主刀相间连杆,使三相同时过死点。
11、手动分闸至某相首先接触缓冲垫,观察另两相距缓冲垫间隙,调节齿板,使三相行程一致;12、分合一次,再次检查无误后,手动3次,电动3次,测量回路电阻,消除故障;13、主刀分闸,调节动侧地刀闭锁扇形板3-8mm间隙,调节静侧主地刀闭锁凹槽对中及3-8mm间隙。
动侧地刀闭锁:借用1#地刀抱箍,粗略抱紧后放长小连杆,使三相闭锁板翘起静侧地刀闭锁:脱开齿板,缩短不锈钢管,调节静侧地刀相间连杆,使得三相凹槽对准调主刀:1、上平台检查拐臂位臵(主刀分闸时,标准起始位臵为:双连杆下沿刚好经过拐臂圆心),若拐臂位臵与标准分闸起始位臵有差异,记住当前状态(以便待会儿下平台后再调主刀相间连杆)。
GW16/17型隔离开关存在问题和改进措施
1 隔 离 开 关 特 点
锈 造成 接 触 不 良 , 使隔 离 开 关 不 能分 、 闸 ;3 操 作 电源 回 路 、 合 () 电 源 保 险烧 坏等 ;4 分 、 闸 止位 接 点 设计 不 合 理 , () 合 材质 差 , 到位 后 不 能可 靠 切换 , 分 、 闸 回路 不通 。 使 合
G l/ 7 隔离 开 关是 高 压系 统 中常 用 的配 电设备 , 高 电 套 拐 臂 的连 接轴 销 处锈 蚀 , 与铜 套 之 间 为硬 性接 触 , w 6l 型 在 轴 天长 地久 , 压系 统 中应 用十 分广 泛 , 主 要 由静触 头 装 配 、 闸 刀系 统 、 地 铜 套 与主 轴之 间锈 蚀 , 其 主 接 造成 转动 困难 , 有时 在解 体 时发现 开关 安装 刀闸 、 转动 瓷瓶和 支 持 瓷瓶 、 底座 装 配和 传动 系统 、 动机 构 组成 。 处 涂油 不 均匀 , 是 平顶 山高压 开 关厂 生产 的产 品 , 由于 24 绝 缘 瓷 瓶 断 裂 . 主要 是转 动 瓷瓶 断裂 比较 多见 , 也有 支 持瓷瓶 断 裂现 象 。 动 转 形 尺寸 小 , 构紧 凑 , 结 占地 面积 小 ;2 动触 头 与静触 头 接触 面 积 大 瓷瓶 断裂 的主要 原 因是 刀 闸的转 动和 传 动部 分锈 蚀 , () 润滑 油 干涩 , ( 用 于管 母 线和 软 母 线) () 用钳 式 结 构 夹 紧静 触 头 , 紧 力 使 ;3 采 夹 导致 操作 力矩 大 大增 加 , 瓷瓶 受 很大 的扭 矩而 被 断裂 , 瓶 的法 兰 瓷 可 靠 ;4 机械 性 能和 导 电性 能 非常 可 靠 ;5 合 闸 的可 靠 性 :) () () 1 采 胶合 处 长期 受到 风 雨侵 蚀 、热 胀 冷缩 而逐 层 脱落 ,如此 反 复恶 循 用顶 压脱 钩 装置 保证 开关 合 闸可 靠 ;) 对独 立 的运 动原 理 : 2相 由于 环, 最终 导致 绝 缘子 与法 兰 在外 力作 用 下最 终完 全脱 离 。 一个 原 另 钳夹 的压 力 由夹紧 弹簧 力保 证 , 得主 触 头的 可靠 性得 到保 证 。 使 采 因是 平衡 弹簧 的调节 不 当 。 用顶 压脱 扣 装 置保 证 隔离 开 关 的 可靠 合 闸 , 凭 风力 、 震 力 、 任 地 电 2. 接 地 刀闸操 作 困难 5 动力 等外 力 的影 响 , 隔离 开关 始终 保 持 良好 的 工作 状态 ;) 路性 3短 能 的改造 : 当短路 电流 通过 时 , 电动 力 使得 动触 片夹 紧 静触 杆 的压 力增 大 。 电部分 的 管状 设计 也 防 止出现 内部 电动 力 ;) 头钳 夹 带 4触 我局 在 改 造前 , 多接 地 刀 闸尽 管 是 单相 操 作 , 十分 费力 , 很 仍 分合 闸 不到位 。 要原 因是 隔离 开 关地 刀 的手力 机 构 , 期 受风 雨 主 长 良好 的特 性 使其 在 高压 系统 中有 着广 泛应 用 。 () 流 能力 大 , 1载 外
GW16调整指导书

项目十三 GW16型隔离开关调整检修作业指导书一、适用范围适用于GW16型隔离开关调整检修作业的实训二、实训标准依据高压隔离开关设备管理规范三、实训目标和要点作业人员掌握对高压隔离开关调整检修的方法流程、操作技巧、检修工艺标准以及作业中的注意事项。
达到二级水平:Ⅱ级适用于熟练作业人员,以及其他具有高级工职业资格人员。
其行为表现是能够独立完成工作要项中较复杂的工作任务。
四、实训流程图五、实训内容和要求(一)实训准备1、布置任务、提出实训要求下达布置实训任务,要求所有培训人员都明确本次实训项目作业的内容、进度要求、安全注意事项。
参加实训人员应身体健康,精神状态良好。
2、对实训学员分组分工按照实训项目作业的要求,对学员分组,并合理分工、小组负责人必须具备相关相关工作经验,且熟悉电气设备安全知识。
3、按工作要求准备工器具、材料、仪器仪表、备品备件(1)工器具(2)仪器仪表(3)备件(4)材料4、其他相关准备准备技术资料、图纸、说明书、工作服、防护用品,检查仪器仪表、安全工器具是否试验合格。
(二)安全措施1、低压交流触电伤人,测试仪器外壳漏电伤人(1)施工现场须配置装有合格的漏电保安器的配电箱。
(2)接电源前,应当按漏电保安器的试验按钮,确定其良好性。
(3)直阻测试仪外壳必须接。
2、检修作业中瓷瓶断裂伤人(1)传动刀闸人员站位合理,防止绝缘瓷瓶在传动过程中伤人。
(2)检修过程中,检修人员不得倚靠绝缘瓷瓶,防止瓷瓶断裂伤人。
(三)隔离开关调整检修作业1.主极隔离开关的调整(1)连接操动机构之前的检查在操动机构安装之前用手推动主刀闸,应分、合正常,对静触头的钳夹位置合适,如果不合适调整静触头钢芯铝铰线直径,直到位置合适为止;(2)操作机构和主极隔离开关的连接将主动极隔离开关置于合闸位置,拉下操作机构电源后将其置于合闸位置,连接机构和刀闸之间的垂直连杆,依次穿上上部的圆柱销、开口销,中间的摩擦接头,用24mm开口扳手紧固其紧固螺栓,手动操作机构检查分、合闸位置,如果操动机构的拐臂已到极限位置而隔离开关确未到达相应的位置,此时可通过调整摩擦接头的处机构侧与垂直连杆的相对位置来实现;(3)主极隔离开关分、合位置的调整操作机构检查刀闸的分、合闸位置,如果两者都不到位,用18mm开口扳手松开固定主拐臂的两条螺栓,适当延长,如果出现分闸不到位或合闸不到位的情况,可适当调整主连杆的长度和摩擦接头的位置,此过程要多次调整直到合适为止,在合闸到位时底座装配上双连杆要过死点;(4)隔离开关下导电臂的调整将刀闸合到位后,如果底座装配中两侧连杆与拐臂已成一条直线,而此时导电部分整体倾斜,可用24mm开口扳手松开连杆两侧的锁紧螺母,用22mm开口扳手调整双连杆的长短实现倾斜度调整;(5)隔离开关上导电臂的调整操作机构合闸到位后如果下导电臂已经垂直,而上导电臂未伸直,此时用24mm开口扳手松开调节接头锁紧螺母,调节其长度直到其完全伸直,然后锁紧螺母;(6)同期的调整操作操作机构在动触头将要接触静触头时,缓慢合闸,观察静触头在两触指中间的位置,以基本在中间为准,如果不符合要求可通过调节静触头的位置使其满足要求;(7)隔离开关触指加紧力的调整将刀闸合闸到位后检查触指加紧力,如果加紧力不够,可增加上导电管插入连接叉或动触头座的深度,此时上导电管最好旋转约20°,并重新配钻定位孔:2、主刀闸的整体联合调整:(1)从动极的调整:将调整好的主动极刀闸分闸到位,将第一从动极检查转动灵活后分闸到位,然后调节好相间连杆长度后将其和主动极相连,手动操作机构检查分合闸情况,上下臂垂直度、加紧位置、同期性调整同主动极的调整方法,如果有分、合闸不到位的情况可以通过调整相间连杆的长度调整位置:(2)第二从动极的方法同第一从动极:(3)电动机构通电操作手动调整完成后将机构和刀闸置于分合的中间位置,然后合上合闸电源,按动操作按钮,观察刀闸的动作方向,如果动作方向和按钮指示相反,按下停止按钮,可以把电机的进线中任意两根调整一下即可,如果刀闸分到位或合到位后电机不停,应检查限位开关是否失灵或两个限位开关位置是否接反:3、接地刀闸的整体联合调整(1)接地刀闸静触头的安装将检修好的接地刀闸静触头安装在导电底座装配上,安装时使螺栓固定在底座装配上长螺孔的中间位置,方便后面调整;(2)接地刀闸动触杆的安装;a)、将动触杆安装在触杆座上;b)、依次安装好弹簧、弹簧挡圈、限位挡圈,弹簧应在合闸时固定其挡圈,使其分闸时受力,最后用13mm紧固定位螺丝;(3)接地刀闸分、合闸调整将三极接地刀闸都置于合闸位置,使动触头正好在静触指的中间位置,如若不在,可在静触头座和导电底座之间加垫实现,如若不到位,可以通过静触头底座上的长孔调整:(4)接地刀闸整体验收调整完毕后将接地刀闸的主拐臂于操作机构连接后连接垂直连杆,用18mm开口扳手紧固抱夹螺栓,然后操作手力操动机构,检查分合位置,如果不合适通过调整水平连杆的长度调整,此过程要反复调整,至到分合都到位为止:4.、主、地刀闸的闭锁装置调整(1)主刀闸、接地刀闸调整完毕后,调整安装在主极刀闸转瓶下部的扇形板和安装在地刀操作机构垂直连杆上的扇形板的位置,使其凹型槽互相限制,保证主刀合闸之后地刀不能合闸,地刀合闸之后主刀不能合闸;:(2)闭锁检查分别操作主刀、地刀,检查其机械闭锁情况5、在合闸状态测量导电回路接触电阻(四)实训结束检查设备检修项目是否齐全,所有项目是否按工艺要求进行,做好课堂记录,按照清单清点工具、仪器仪表、备品备件、消耗材料、记录使用情况,并按照基地定置要求归位,清扫整理工作现场,液压机构检修作业结束。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
GW16、17-252 型隔离开关的使用说明:由于GW16型和GW17型的产品结构和动作原理相同,下面以GW16型为例进行介绍1 概述1.1 产品用途GW16-252 型单柱垂直断口隔离开关(以下简称隔离开关)是供220kV 高压线路在无载流情况下进行切换和对被检修的高压母线及其它电气设备与带电线路进行电气隔离的三极户外高压电器。
本隔离开关具有载流能力大、占地面积小等特点,是220kV电站中进出线互为90︒布置时的一种理想的隔离开关,它结构紧凑、运动部分密封良好,因此,一般很少需要检修。
1.2 操动机构型号每一组隔离开关配一台CJ7A型电动操动机构,附装的接地开关配CSC型人力操动机构。
1.3 产品主要规格本产品规格有两种:不接地、接地。
1.4 有关机械调整参数1.4.1 隔离开关主回路(从下接线板至静触杆)电阻,不大于95μΩ;1.4.2 接地闸刀主回路(从下部软连接末端至接地静触头处)电阻,不大于250μΩ1.4.3 隔离开关断口最小空气绝缘距离:2.6m;1.4.4 隔离开关对地最小空气绝缘距离:2.0m;1.4.5 隔离开关三极合闸同期性不大于:20mm;1.4.6 接地开关三极合闸同期性不大于:15mm;2 产品结构和工作原理2.1 产品结构本隔离开关结构外形见右图,主要由底座装配、绝缘子、主闸刀系统、接地开关系统等组成。
2.1.2 隔离开关主闸刀的结构见图22.2 工作原理本隔离开关的运动过程是由两部分运动复合而成的,即折叠运动和夹紧运动。
折叠运动:由CJ7A型机构驱动旋转瓷瓶作水相连的一对伞齿轮带动平面双四连杆运动,从而使下导电管顺时针转动合闸,逆时针转动分闸;由于调整螺杆装配与下导电管的铰接点不同,从而使与调整螺杆装配上端铰接的操作杆相对于下导电管作轴向位移,而操作杆的上端与齿条固连,这样齿条的移动便推动齿轮转动,从而使与齿轮轴固连的上导电管相对于下导电管作伸直(合闸)或折叠(分闸)运动;另外,在操作杆轴向位移的同时,平衡弹簧按预定的要求储能或释能,最大限度地平衡刀闸的重力矩,以利于刀闸的运动。
夹紧运动:隔离开关由分闸位置向合闸方向运动的过程中,并在接近合闸位置(快要伸直)时,滚轮开始与齿轮箱上的斜面接触,并沿着斜面继续运动。
于是,与滚轮相联的顶杆便克服复位弹簧的反作用力向前推移,同时动触头座内的对称式滑块增力机构把顶杆的推移运动转换成触指的相对钳夹运动。
当静触杆被夹住后,滚轮继续沿斜面上移3~5mm,直至完全合闸,此时夹紧弹簧的力已作用在顶杆上。
在这个过程中,由于顶杆被设计成推压柔性杆,故原已预压缩的夹紧弹簧被第二次压缩,并作用在顶杆上,使得顶杆获得一个稳定的推力,从而使触指对静触杆保持一个可靠不变的夹紧力。
当开关开始分闸时,滚轮沿斜面向外运动,直到脱离斜面。
此时,在复位弹簧的作用下,顶杆带动触指张开呈“V”形。
2.2 接地开关的结构及工作原理接地开关结构见图4,其运动过程是靠人力机构通过一套四连杆转换后,带动接地底座上的主动臂转动,由于主动臂与门形支架和接地刀管是按设计要求组成的一套特殊的四连杆系统,从而保证了接地闸刀在合闸过程中,先作转动,在接近合闸位置时,直线向上运动,插入到静触头内。
分闸反之。
3 隔离开关的调整3. 1 主刀边极分合闸不到位可调整边拐臂及水平连杆长短。
3.2 分合闸同期调整调整边拐臂及水平连杆长短。
3.3 下导电管不直调整主刀底座装配中两拉杆长短。
3.4 上导电管不直调整下导电管装配插入齿轮箱的深度。
4 隔离开关可能出现的故障原因及处理方法(详见附录)5 安装及检修后的检查和验收5.1 目测主闸刀在合闸位置应竖直成一直线。
5.2 主闸刀合闸后,动触片的八个接触点,均应与静触杆接触良好。
5.3 主闸刀断口距离不小于2600mm;接地刀断口距离不小于2000mm。
5.4 检查主闸刀的三极合闸同期性不大于20mm测量方法:当任一极的两侧动触片均与静触杆接触时,测量另外两极动、静触头间距离L1、L2(见图10 c),且½ (L1+L2)≤20mm。
5.5 检查接地刀的三极合闸同期性不大于15mm检查方法:当任一极的动、静触头刚接触时,测量另外两极动、静触头的距离不大于15mm。
3.6 接地刀合闸后,刀头插入静触头深度为40 +10mm。
05.7 接通电源,对电动机构分别施加 100%、85%、110%额定电压,并分别进行三次分、合闸操作,分、合闸位置应正确。
5.8 用人力机构操动接地开关动作时,作用在手柄上的力应不大于200N。
5.9 用电压降法检测隔离开关和接地开关的总回路电阻应不大于95μΩ和250μΩ。
5.10 检查隔离开关与接地开关是否能实现可靠的机械联锁及电磁锁的动作是否可靠。
5.11 检查齿轮箱装配中支轴是否随主闸刀运动而转动。
3.12 检查所有轴销及有相对运动的部位是否涂润滑脂,螺栓是否紧固。
6 维修该产品的主闸刀,由于其运动部分均装在导电管内部,密封较好,故一般很少需要检修,但各连接轴销则直接暴露在空气中,因此,应注意定期涂二硫化钼。
维修时应注意如下事项:在拆卸零件过程中,需记录各部件间的相互位置,标准件的规格以免重新装复时产生错误。
修后装复时,所有相对运动部份都应涂二硫化钼。
所有铝与铝接触的导电面,由于氧化极快,故应先涂一层凡士林油,用砂纸或钢刷按网格方式往复摩擦(去掉氧化层),用布擦去油污,然后重新涂上薄薄的一层凡士林油,并立即用螺栓紧固其连接件。
7 隔离开关螺栓力矩值(仅供参考)(附录)GW16\17型高压隔离开关的使用维护和故障处理一、产品的使用与维护隔离开关静触头受风力、气温、冰冻等环境的影响,使其在空间的位置变化较大,因此,用户应对母线采取适当措施,如采用硬母线、增大母线张力、缩小母线挡距等,使静触头在各种恶劣气候条件下的变动范围不超过触头的规定接触区域。
隔离开关在检修后投入使用之前,除对主闸刀和接地闸刀按规定进行检查外,不要进行以下检查,待确定正常后,方可投入正常运行。
①在手力操作分、合过程中,用手感觉操作力应均匀增加或减少(以主刀下导电管内平衡弹簧开始储能或开始释放能为界限),且分、合闸操作力应基本一致。
②在分、合闸位置时,机构终点位置与辅助开关接点位置应正确,并能正常切换。
③接线端子应与母线连接良好。
投入运行后,隔离开关必须在线路负载切断后方可进行操作。
本产品由于在传动处多采用复合轴套,有较好的“自润滑性”,同时,主闸刀的传动部件装导电管内,密封良好,故一般很少检修,但由于部分连接轴销、标准件等裸露在空气中,因此对隔离开关及操作机构仍需定期进行检查和维护。
主要注意以下几点:①清理瓷瓶表面污垢,檫净触头接触表面并涂白色凡士林。
②所有传动、转动部件应加润滑油进行润滑。
③检查所有紧固件,如圆柱销、螺母等是否有松动现象。
④主刀及地刀是否运动正常,触头接触是否良好。
⑤在分、合闸位置时,三极是否同期,机构中辅助接点是否可靠,切换正常。
定期大修时应注意以下事项:①在拆卸过程中,要记录各零件的互相位置,标准件的规格。
②拆卸时,应先打开下导电管外壁的窗口盖板,使下导电管内的平衡弹簧完全放松,以免弹簧作用使闸刀弹开伤人。
拆卸导电管时,需用斜铁将有关零件的缺口楔开,拆下定位螺塞,然后拆下导电管。
当需要取下弹性圆柱销时,可用冲子冲出,若一处有两个弹性圆柱销时,应先取出里面的,然后再取出外面的。
注意:拆卸时不要碰击导电接触面和镀银层。
装复时,所有运动部位均应涂润滑油,导电面涂白色凡士林,对铝与铝接触的非镀银导电面,由于氧化极快,故应先涂白色凡士林,用钢刷按网格方式往复磨檫,然后用干净的布檫净,再迅速涂上一层白色凡士林,并立即装配。
二、常见故障的分析与处理方法1、动触片与静触杆接触不良。
产生原因:①动触片的四个触点与静触杆不平行。
②动触片变形。
处理方法:对第①种情况,解决方法有三种(一)松开上导电管与动触头装配之间的紧固螺栓及定位螺塞,视具体情况稍微转动一下动触头座装配,然后拧紧各螺栓。
(二)可通过调整静触杆来实现动、静触头的可靠接触。
(三)调整动触片,使每侧的两个动触片的四个电接触面在同一平面内。
对第②种情况,更换动触片。
2、隔离开关当主闸刀合闸终了时,动、静触头之间的接触压力不够或无夹紧力。
产生原因:①上导电管装配中的操作杆长度尺寸短。
②上导电管长度尺寸长。
③中间的滚子直径较小。
④静触头导电杆直径较小。
处理方法:针对第①、②种情况可松开中间接头装配与上导电杆装配相连的定位螺栓及紧固螺栓,将上导电管向连接叉里插进一些,再进行装复。
对第③种情况可更换新滚子,滚子外径为Φ30。
对第④种情况可采用外径为Φ40的静触杆。
3、开关处在合闸位置时,下导电杆处于垂直(GW16型)或水平(GW17型)位置,而上导电杆不垂直或不水平。
产生原因:主导电系统内的齿条与齿轮啮合不正确。
处理方法:①当下导电杆垂直或水平而上导电杆向分闸方向倾斜时,可松开中间接头装配的齿轮箱与下导电杆装配相连的紧固螺栓及定位螺栓,将齿轮箱沿下导电杆方向向下滑移1—4mm,倾斜严重的可将齿轮箱取下,重新挂齿并加以调整,使上、下导电杆成一直线,并将紧固螺栓及定位螺塞拧紧。
②当下导电杆垂直或水平而上导电杆向合闸方向倾斜时,可松开中间接头装配的齿轮箱与下导电杆装配相连的紧固螺栓及定位螺塞,将齿轮箱沿下导电杆方向向上滑移1—4mm,倾斜严重的可将齿轮箱取下,重新挂齿并加以调整,使上、下导电杆成一直线,并将螺栓及定位螺塞拧紧。
4、开关处在合闸位置时,上、下导电杆成一直线,但整体不在铅垂(GW16型)或水平(GW17型)位置。
产生原因:接线底座装配调节拉杆长度调整不当。
处理方法:松开调节拉杆上的锁紧螺母,适当放长或缩短调节拉杆的长度。
注意:一定要使两调节拉杆长度相等,并将锁紧螺母拧紧。
5、隔离开关在调试时,单极分、合闸力矩之差大于30Nm。
产生原因:下导电管内平衡弹簧压缩量调整不当。
处理方法:GW16—252在分闸过程中,平衡弹簧逐渐存储能量(弹性势能),在合闸过程中弹性势能逐步被释放。
当合闸力矩大,分闸力矩小时,可将调节螺母顺时针旋转,使平衡弹簧的储能增加,从而适当减小合闸力矩,同时增加分闸力矩,以达到分、合闸力矩基本平衡之目的。
反之,若合闸力矩小而分闸力矩大时,调整方法与以上相反。
GW17—252在合闸过程中,平衡弹簧逐渐存储能量,在分闸过程中弹性势能逐步被释放。
当分闸力矩大,合闸力矩小时,可将螺套顺时针旋转,使平衡弹簧的预压力增大,即弹簧储能增加,从而适当减小分闸力矩,同时增加合闸力矩,以达到分、合闸力矩基本平衡之目的。
反之,分闸力矩小而合闸力矩大,调整方法与以上调整方法相反。
6、本产品在三极联动时,主极的分、合闸正常而一边极合闸越位但分闸不到位,另一边极分闸越位但合闸不到位。