基于D-H模型的机器人运动学参数标定方法
基于D-H坐标系法的机器人运动学研究

基于D-H坐标系法的机器人运动学研究张博【摘要】在机器人运动学研究中,普遍用D-H坐标系法作为分析方法.虽然D-H坐标系法在机器人运动学中应用广泛,但其本身缺少误差补偿.文中通过D-H正运动学法构建了机械运动学模型,并在此基础上提出了一种误差分析方法.该方法通过分析坐标系参数偏差的方式计算偏差量并纠正原模拟结果.通过matlab仿真,所得结果对比表明,D-H正运动学法能较好地描述机械结构的运动趋势,加入参数误差补偿后,能得到更准确的结果.【期刊名称】《电子科技》【年(卷),期】2016(029)006【总页数】3页(P154-156)【关键词】机器人;D-H坐标系;误差补偿;参数偏差【作者】张博【作者单位】惠州工程技术学校工学系,广东惠州516001【正文语种】中文【中图分类】TP242在机器人运动学分析中,关节的运动方式决定着机器人的运动方式[1-2]。
因此,各关节处运动参数的分析至关重要。
一直以来,对于机器人运动学的研究均是在关节处建立坐标系,通过对坐标系参数的分析来判断关节的运动方向,进而分析整个机器人或机器人某部分的运动方向[3-4]。
建立机器人坐标系有两种较为常用的方法,分别是旋量理论和D-H法,相对于旋量理论,D-H法应用更为广泛[5-7]。
D-H法的本质是坐标变换,将坐标系建立在机器人的移动或转动关节处,然后进行相应的坐标变换,得到关节变量参数表,代入运动方程获得解析解[6]。
D-H法适用于大部分机械结构的运动学研究。
但在用其建立各关节坐标系时,参数等选择的偏差会给最终结果带来影响,使分析结果偏离真实情况。
本文应用D-H正运动学法构建目标机械结构的运动模型,并提出一种误差补偿法。
该方法通过分析坐标系的参数误差,并根据实际情况,提供适当的补偿,能使模拟结果更加接近真实情况。
D-H模型是常用的机器人运动学模型,用θi、αi、ai和 di4个参数描述机器人相邻两连杆的关系,简称四参法[8]。
基于D-H法的锻造机器人运动学分析
di
θi 范围
0°
0
0
-180°~180°
0°
-90°
90°
-90°
(4) 关节 4 坐标系相对于关节 3 坐标系进行齐次变换后的
0
a2
0
0
-180°~180°
0
d6
-180°~180°
0
0
(5) 关节 5 坐标系相对于关节 4 坐标系进行齐次变换后的
矩阵 5 T 为:
4
(6)
5
é c 6 -s 6
T = 10T ( θ1 ) 21T ( θ 2 ) 32T ( θ 3 ) 43T ( θ 4 ) 54T ( θ 5 ) 65T ( θ 6 )
0
6
1.2 正运动学公式推导
机器人正运动学主要用以表示机器人的基坐标系与其末
端坐标系之间的关系。运用齐次坐标对其进行变换,将多个
齐次变换矩阵进行连乘运算,以得到机器人的正运动学方
Kinematic Analysis of Forging Robot Based on D-H Method
Xue Zhongjian
(School of Mechanical Engineering, Anhui University of Science and Technology, Huainan, Anhui 232001, China)
ú
0 1û
(6) 关节 6 坐标系相对于关节 5 坐标系进行齐次变换后的
-115°~90°
a3
é c 4 -s 4
êê 0
0
T = êê
êê-s 4 -c 4
0
ë0
3
4
4
机器人利用DH模型标定
确定偏移
根据DH模型建立坐标系,有 标变换)。
(齐次坐
测量四个点,基中工具末端必须只在一个固定点,而机器人必须
以不同的姿态使机器人的末端处于不同的位置,其中第四点以竖直
方向接近于固定点,如图。
这四个点确定一个球体,并且可以
计算其球心,工具的末端中心与球心
重合。球心坐标为:
。
确定偏移
将
化成向量表示:
工具坐标系{T},用来定义TCP(tool center point)的位置 及工具的姿态。
工件坐标系{U},用户在工作空间中自定义的坐标系,是程 序中记录的所有位置的参考坐标系。
工具坐标系标定指的是工具坐标系相对于末端坐标系 的位姿参数的确定,即 坐标变换矩阵的确定。
工件坐标系的标定指的是工件坐标系相对于基坐标系 的位姿参数的确定,即 坐标变换矩阵的确定。
n 1
比如,一般机器人的关节2与关节3之间的 变换可以简化为:
C3
2T3
A3
S
3
0
0
S3C3 C3C3
S3
0
S3S3 C3S3
C3
0
a3C3
a3
S
3
d3 1
推广到n个自由度
在机器人的基座上,可以从第一个关节开始变换 到第二个关节,然后到第三个关节……,再到机 器人的末端执行器。
C1C5 S234 S5
0
C1 (C234a4
C23a3 C2a2 )
S1 (C234a4
S
C23a3 C2 a 234 4 S23a3
a2 ) S
2
a
2
1
二 利用DH模型标定过程
机器人标定过程介绍 工具坐标系的标定 工件坐标系的标定
机器人正运动学方程的D-H表示法

2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。
标准d-h参数法建立六关节臂型机器人的连杆坐标系

标准d-h参数法建立六关节臂型机器人的连杆坐标系
标准D-H参数法是一种常用的方法,用于建立机器人的运动
学模型。
在六关节臂型机器人中,每个关节都有一个连杆坐标系。
以下是使用标准D-H参数法建立六关节臂型机器人连杆坐标
系的步骤:
1. 给每个关节定义一个坐标系,通常选择右手坐标系规定方向。
其中,基座(base)使用基座坐标系(坐标系0),末端执行
器(end effector)使用末端坐标系(坐标系N)。
2. 选择一个参考位置,并为每个关节选择一个坐标系原点,通常选取连接轴线的交点作为原点。
3. 根据机器人的结构和运动特点,确定关节坐标系的方向,规定z轴为关节轴线的方向,x轴为连接前一关节与当前关节的
交线的方向。
4. 使用三个转换矩阵描述每个关节的位姿变换,即由前一个关节坐标系到当前关节坐标系的变换关系。
5. 使用DH参数(a, alpha, d, theta)描述每个关节坐标系之间
的相对位移,其中a和alpha表示连接前一关节与当前关节坐
标系原点的距离和连接线与x轴之间的夹角;d表示连接前一
关节与当前关节坐标系原点在z轴方向上的位移;theta表示
连接前一关节与当前关节坐标系原点在z轴方向上的旋转角度。
6. 根据DH参数,建立每两个关节坐标系之间的变换矩阵,乘积即为整个机器人的运动学变换矩阵。
值得注意的是,标准D-H参数法只能用于建立运动学模型,
不考虑机器人的物理约束和动力学特性。
如果需要进行动力学分析和控制,还需要考虑惯性、摩擦等因素,使用更为复杂的方法。
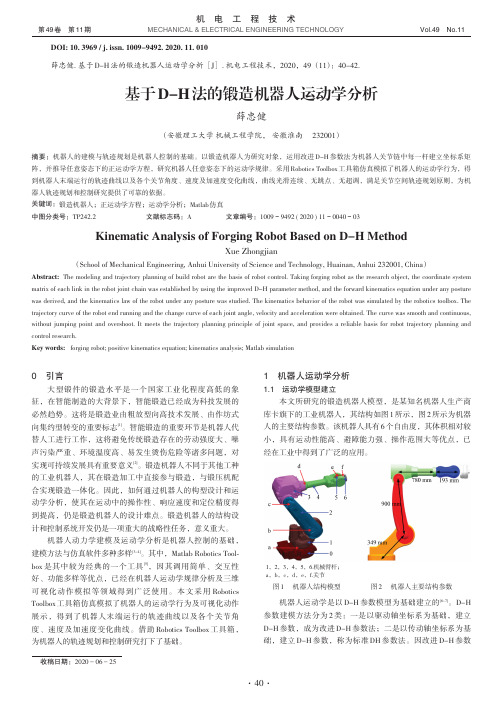
工业机器人运动学模型标定方法

工业机器人运动学模型标定方法工业机器人在现代制造中的应用越来越广泛,对于现代制造企业降本增效、产品升级、质量控制、工人劳动条件改善等都具有十分重要的作用。
随着先进制造对高速、高精度、大承载工业机器人的需要,要求机器人系统本身须有较高的控制精度,控制精度主要通过位姿特性、轨迹特性及负载特性等指标来体现,这些是工业机器人的共性关键指标。
GB/T中关于机器人的位姿特性主要包括位姿准确度和位姿重复性。
位姿重复定位精度已经可以满足工业需求,但是在工作环境中,由于机械加工精度、装配误差、传动误差、磨损、环境影响等因素,造成机器人的实际运动学模型与理论运动学模型之间存在误差,从而影响机器人绝对定位精度。
随着对机器人的绝对定位精度要求越来越高,对提高机器人绝对定位精度的研究也成为了研究重点,通过标定技术来提高机器人绝对定位精度是国内外研究的热点。
本文主要针对工业机器人运动学模型标定中不同方法的参数建模和参数识别特点进行了比较。
1 运动学模型标定运动学模型标定主要是将影响机器人末端位姿偏差的因素归因于机器人连杆参数误差和关节角度误差,通过对运动学参数误差进行建模并借助一定的测量手段测量机器人末端位姿误差,结合参数辨识算法或数值优化算法识别出理论模型参数的误差,最后将各参数误差修正至模型参数的理论值。
研究文献表明,机器人的定位误差95%都是由于所建运动学模型不准确所造成的。
机器人运动学模型标定通常包括参数建模、误差测量、参数辨识、误差补偿四个步骤。
通过对运动学模型的参数辨识方法辨识出串联机械臂的准确参数,并对机械臂的结构误差进行补偿,从而提高机器人的绝对定位精度。
2 参数建模参数建模是建立描述机器人几何特性和运动性能的数学模型。
目前研究主要涉及到的运动学模型主要有DH模型、MDH模型、修正DH模型、S模型、CPC模型和POE模型,其中运用较广泛的是DH 模型、MDH模型和POE模型。
DH模型是最早被提出来的,其参数定义少、模型过程建立方便被广泛应用,但是模型奇异和冗余等问题突出,而且不满足误差模型完整性和连续性的要求。
机器人D-H法.pptx
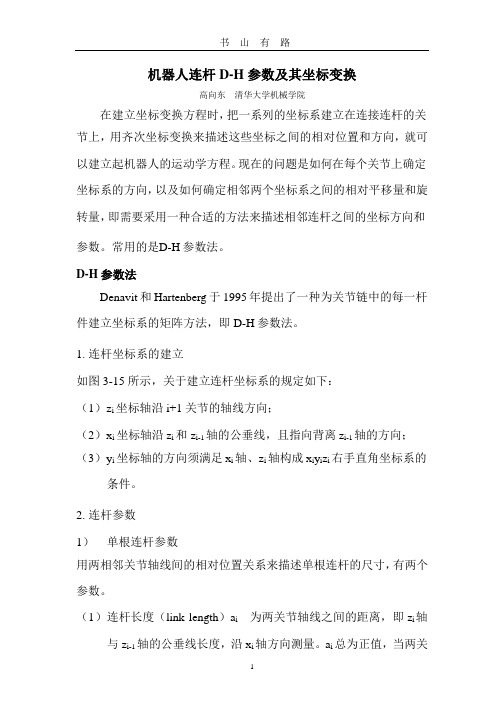
Denavit 和 Hartenberg 于 1995 年提出了一种为关节链中的每一杆 件建立坐标系的矩阵方法,即 D-H 参数法。
1. 连杆坐标系的建立 如图 3-15 所示,关于建立连杆坐标系的规定如下: (1)zi 坐标轴沿 i+1 关节的轴线方向; (2)xi 坐标轴沿 zi 和 zi-1 轴的公垂线,且指向背离 zi-1 轴的方向; (3)yi 坐标轴的方向须满足 xi 轴、zi 轴构成 xiyizi 右手直角坐标系的
书山有路
机器人连杆 D-H 参数及其坐标变换Байду номын сангаас
高向东 清华大学机械学院
在建立坐标变换方程时,把一系列的坐标系建立在连接连杆的关 节上,用齐次坐标变换来描述这些坐标之间的相对位置和方向,就可 以建立起机器人的运动学方程。现在的问题是如何在每个关节上确定 坐标系的方向,以及如何确定相邻两个坐标系之间的相对平移量和旋 转量,即需要采用一种合适的方法来描述相邻连杆之间的坐标方向和
2
条件。
2. 连杆参数 1) 单根连杆参数 用两相邻关节轴线间的相对位置关系来描述单根连杆的尺寸,有两个 参数。 (1)连杆长度(link length)ai 为两关节轴线之间的距离,即 zi 轴
与 zi-1 轴的公垂线长度,沿 xi 轴方向测量。ai 总为正值,当两关
1
书山有路
节轴线平行时,ai=li,li 为连杆的长度;当两关节轴线垂直时, ai=0。 (2)连杆扭角(link twist)αi 为两关节轴线之间的夹角,即 zi 与 zi-1 轴之间的夹角,绕 xi 轴从 zi-1 轴旋转到 zi 轴,符合右手规则时 为正。当两关节轴线平行时,αi=0;当两关节轴线垂直时,α i=90o。 2)相邻连杆之间的参数 相邻两连杆之间的参数,用两根公垂线之间的关系来描述。 1 连杆距离(link offset)di 为两根公垂线 ai 与 ai-1 之间的距离, 即 xi 轴与xi-1 轴之间的距离,在 zi-1 轴上测量。对于转动关节, di 为常数;对于移动关节,di 为变量。 2 连杆转角(joint angle)θi 为两根公垂线 ai 与 ai-1 之间的夹角, 即 xi 轴与 xi-1 轴之间的夹角,绕 zi-1 轴从 xi-1 轴旋转到 xi 轴,符 合右手规则时为正。对于转动关节,θi 为变量;对移动关节, θi 为常数。 这样每根连杆由四个参数来描述,其中两个描述了连杆自身的尺寸, 另外两个描述了连杆之间的相对位置关系。 总结:机器人的每根连杆都可以用四个参数来描述,其中两个参数 ai 和αi 用于描述连杆本身的特征,其数值的大小是由 zi-1 和 zi 两轴之 间的距离和夹角来决定的。另外两个参数 di 和θi 用于描述连杆之间 的连接关系,其数值的大小是由 xi-1 和 xi 两轴之间的距离和夹角来决 定的。
机器人利用DH模型标定
0 0 0 1
C2 S A2 2 0 0
S2 C2 0 0
0 C 2 a2 0 S 2 a2 1 0 0 1
C3 S A3 3 0 0
S3 C3 0 0
0 C3a3 0 S3a3 1 0 0 1
C n1 S n1C n1 S n1S n1 an1C n1 S C C C S a S n 1 n 1 n 1 n 1 n 1 n 1 An1 n1 0 S n1 C n1 d n1 0 0 1 0
上式中: C =cos n 1 n 1 S n=sin 1
n 1
比如,一般机器人的关节2与关节3之间的 变换可以简化为:
C 3 S 3 2 T3 A3 0 0 S 3C 3 C 3C 3 S 3 0 S 3 S 3 C 3 S 3 C 3 0 a3C 3 a3 S 3 d3 1
参数辨识
基于机器人运动学模型 和误差模型,通过合理的 数值算法辨识机器人的运 动学参数。 参数辨识过程如图所示
补偿
修改控制器中的参数,使得理论值与实际值误差达到最小。 一般需通过逆运动学计算来对机器人各关节角度进行补偿。 误差补偿的方法:
关节空间补偿:将运动学参数误差等效在关节上,对机器 人的关节角度进行补偿,从而提高机器人的末端定位精度。
机器人标定过程介绍
建立模型 测量 参数辨识 补偿
建立模型
建立描述机器人几何特性和运动性能的数学模型。运动 学模型的选择是决定机器人绝对定位精度的重要因素之 一。
最经典的运动学模型是D-H 模型,此模型的不足是相邻 两关节平行或接近平行时模型具有奇异性。
《机器人技术与应用》D-H参数标定实验程序
% 《机器人技术与应用》D-H参数标定实验程序clear;close all;t1 = tic;% 读取数据EEvalue = importdata('./MeasureData/EndValue.txt');EEbasematrix = importdata('./MeasureData/BaseValue.txt');EEthetaValue = importdata('./MeasureData/AngleValue.txt');% 去除含有NaN的行EEvalue.data(any(isnan(EEvalue.data),2),:) = [];EEbasematrix.data(any(isnan(EEbasematrix.data),2),:) = [];% theta化为弧度EEthetaValue = EEthetaValue * (pi / 180);% 进行平面,圆,点的分裂处理DataSize = size(EEthetaValue,1);planeEE = zeros(DataSize,6);circleEE = zeros(DataSize,6);pointEE = zeros(DataSize,6);for j = 1:DataSizecircleEE(j,:) = EEvalue.data(3*j-2,1:6);planeEE(j,:) = EEvalue.data(3*j-1,1:6);pointEE(j,:) = EEvalue.data(3*j,1:6);end% 测量坐标系下,机器人基坐标系Tm_bpm_b = EEbasematrix.data(2,1:3)';zm_b = EEbasematrix.data(1,4:6)';ym_b = EEbasematrix.data(3,4:6)'; %因为不知道Y轴是怎么测的。
基于D-H方法建立抛光机器人的运动学模型
式 中, P 、 P 和 P 分别 为 该 点 的在 轴 、 Y轴 和 z轴 方
向 的空 间坐标 。
获取了物体的任意点位置后 , 还需要得到该 物体 的姿态信息方可进行运动学分析。假设直角坐标系 F 与该 物体 固定 相连 接 , 则 可 通 过坐 标 系 F的 3个 方 向
t h e ma c h i n i n g p a t h o f e a c h j o i n t .T h e i d e a o f D —H n o t a t i o n i s i n t r o d u c e d t o s o l v e t h e r o b o t i n v e r s e k i n e ma t i c s e q u a — t i o n f o r t h e t r a j e c t o r y o f t h e e n d o f t h e a c t u a t o r ,t h u s a c h i e v i n g t h e r o b o t ’ S k i n e ma t i c s s i mu l a t i o n .T h e r o b o t e n d e x e c ‘ u t o r p e r f o r ms a c h a r a c t e r” ME”t r a j e c t o r y t o s h o w t h e c o n c r e t e a p p l i c a t i o n .T h e t r a j e c t o y r o f t h e r o b o t p ov r i d e s t h e o ‘
图46自由度机器人运动学模型由式9可得7个连杆中任意两个相邻连杆之间坐标变换矩阵由于坐标系6固定于末端执行器上因此机械手臂末端执行器相对于基坐标系0变换矩阵f为f06fnxoxaxpxnyoyaypynzozazpz000????????????101f12f23f34f45f56f10通过式10转换矩阵进行变换即可根据各关节的运动计算出末端执行器的运动轨迹从而进行机器人运动学仿真
机器人正运动学方程的D-H表示法
2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。
机器人正运动学方程的d-h表示法
2.8机器人正运动学方程的D-H表示法在1955年,Denavit和Hartenberg在“ASME Journal of Applied Mechanics”发表了一篇论文,后来利用这篇论文来对机器人进行表示和建模,并导出了它们的运动方程,这已成为表示机器人和对机器人运动进行建模的标准方法,所以必须学习这部分内容。
Denavit-Hartenberg(D-H)模型表示了对机器人连杆和关节进行建模的一种非常简单的方法,可用于任何机器人构型,而不管机器人的结构顺序和复杂程度如何。
它也可用于表示已经讨论过的在任何坐标中的变换,例如直角坐标、圆柱坐标、球坐标、欧拉角坐标及RPY坐标等。
另外,它也可以用于表示全旋转的链式机器人、SCARA机器人或任何可能的关节和连杆组合。
尽管采用前面的方法对机器人直接建模会更快、更直接,但D-H表示法有其附加的好处,使用它已经开发了许多技术,例如,雅克比矩阵的计算和力分析等。
假设机器人由一系列关节和连杆组成。
这些关节可能是滑动(线性)的或旋转(转动)的,它们可以按任意的顺序放置并处于任意的平面。
连杆也可以是任意的长度(包括零),它可能被弯曲或扭曲,也可能位于任意平面上。
所以任何一组关节和连杆都可以构成一个我们想要建模和表示的机器人。
为此,需要给每个关节指定一个参考坐标系,然后,确定从一个关节到下一个关节(一个坐标系到下一个坐标系)来进行变换的步骤。
如果将从基座到第一个关节,再从第一个关节到第二个关节直至到最后一个关节的所有变换结合起来,就得到了机器人的总变换矩阵。
在下一节,将根据D-H表示法确定一个一般步骤来为每个关节指定参考坐标系,然后确定如何实现任意两个相邻坐标系之间的变换,最后写出机器人的总变换矩阵。
图2.25 通用关节—连杆组合的D-H表示假设一个机器人由任意多的连杆和关节以任意形式构成。
图2.25表示了三个顺序的关节和两个连杆。
虽然这些关节和连杆并不一定与任何实际机器人的关节或连杆相似,但是他们非常常见,且能很容易地表示实际机器人的任何关节。
基于D-H模型的机器人运动学参数标定方法
基于D-H模型的机器人运动学参数标定方法摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。
借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。
关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型;Robot kinematic parameters calibration based on D-H modelWang Yi(State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China)Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation.Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model;引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。
简述机器人坐标系d-h法的建立方法
简述机器人坐标系d-h法的建立方法
DH法(D-H表示Denavit-Hartenberg参数)是机器人学中常用的建立机器人坐标系的方法。
该方法基于以下原则:
1. 坐标系的方向应与机器人的关节轴线一致。
2. 第一个坐标系应与机器人基座相对应。
3. 坐标系的原点应被定义为机器人关节轴线的交点。
4. 坐标系的x轴应指向下一个坐标系原点沿着前一个坐标系z轴方向的投影。
5. y轴应沿着右手法则确定,使得z轴、x轴和y轴构成右手系。
DH法建立机器人坐标系的步骤如下:
1. 确定机器人的关节数和关节类型。
2. 为每个关节定义一个坐标系。
3. 根据关节类型确定每个关节坐标系的变换关系(平移和旋转),并通过设定DH参数进行表述。
4. 将变换矩阵相乘得到机器人所有坐标系之间的变换矩阵,从而得到机器人坐标系(通常选择机器人末端执行器坐标系为目标坐标系)。
DH法能够简便而准确地描述机器人的运动学,是目前机器人学中最常用的方法之一。
基于改良的D-H模型的机器人运动参数标定方法
基于改良的D-H模型的机器人运动参数标定方法高瑞翔 杨青 房鹤飞 / 上海市质量监督检验技术研究院摘 要 通过在D-H模型中添加一个旋转参数能够弥补其存在的缺陷。
通过激光跟踪仪测量机器人末端位置,能够逆解算出相应的运动参数补偿值。
经过补偿后,机器人的定位度得到了明显的改善。
关键词 D-H模型;运动参数;机器人;定位精度0 引言如今,机器人在工业制造中的应用越来越广泛。
根据不同的应用范围,各行业对于机器人的性能要求也不尽相同。
然而,在各项参数指标中,定位度的要求往往是最关键的。
因此,对于机器人定位度的标定研究是十分重要的[1]。
不同于机床、加工中心等坐标定位设备,机器人末端位置无法由移动机构直接到达,而是由各个机器人各轴电机根据运动学计算获得的参数进行控制,电机转动后间接使机器人末端到达所要求的位置。
由此,提高机器人定位度的关键在于标定机器人各轴的运动参数。
目前,对于机器人运动参数标定,人们已经进行了大量的研究。
研究表明,机器人末端定位精度的影响主要来源于机器人的运动模型。
由于机器人的运动控制方式为半闭环,且运动姿态也是在机器人的使用过程中需要考虑的,因此,在确保所确立的运动模型准确的同时,还需要避免由于运动参数变化后引起机器人的位姿发生跃变[2]。
现今应用最为广泛的机器人运动参数模型为Denavit和Hartenberg建立的D-H模型。
D-H模型对于机器人结构没有苛刻的要求,不仅可应有于单轴机器人的运动参数标定,也可应用于当今被广泛使用的6轴机器人,简单及普适的特性,使其成为经典。
然而该模型也存在明显缺陷,即当机器人的两个运动轴接近于平行时,该模型在解算时会发生奇异。
针对此缺陷,改良的运动模型被建立。
Crai 在D-H模型的参数中增加了旋转参数,提出了MDH运动学模型。
Stone提出了S模型,通过使用三个参数和三个旋转参数的方式,来解决参数解算时的奇异问题。
Zhuang和Roth建立了MCPC模型,为了保证机器人运动的连续性,增加了多个运动参数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于D-H模型的机器人运动学参数标定方法摘要:通用机器人视觉检测站中的机器人是整个测量系统中产生误差的最主要环节,而机器人的连杆参数误差又是影响其绝对定位精度的最主要因素。
借助高精度且可以实现绝对坐标测量的先进测量设备——激光跟踪仪,及其功能强大的CAM2 Measure 4.0配套软件,并利用串联六自由度机器人运动的约束条件,重新构建起D-H模型坐标系,进而对运动学参数进行修正,获得关节变量与末端法兰盘中心位置在基坐标系下的准确映射关系,以提高机器人的绝对定位精度,最后通过进一步验证,证明取得了较为理想的标定结果。
关键词:视觉检测站;工业机器人;绝对定位精度;激光跟踪仪;D-H模型;Robot kinematic parameters calibration based on D-H modelWang Yi(State key laboratory of precision measuring technology and instruments, Tianjin University, 300072,China)Abstract:Robot for universal robot visual measurement station is the most primary part causing errors in the entire system and link parameter errors of industrial robot have a great influence on accuracy. Employing laser tracker, which can offer highly accurate measurement and implement ADM (absolute distance measurement), as well as relevant software, making use of movement constrain of series-wound six-degree robot, D-H model coordinates were rebuilt. Accordingly, kinematic parameters were modified, and precise mapping from joint variables to the center of the end-effector in base coordinate was obtained and accuracy got improved. At last, result is proved acceptable by validation.Keywords: visual measurement station; industrial robot; accuracy; laser tracker; D-H model;引言:随着立体视觉技术的不断完善与发展,利用机器人的柔性特点,发展基于立体视觉的通用测量机器人三维测试技术逐渐成为各大机器人生产厂家非常重视的市场领域。
机器人的运动精度对于工业机器人在生产中的应用可靠性起着至关重要的作用。
机器人各连杆的几何参数误差是造成机器人系统误差的主要环节,它主要是由于制造和安装过程中产生的连杆实际几何参数与理论参数值之间的偏差造成的。
通常,机器人以示教再现的方式工作,轨迹设定好之后,只在某些固定点之间运动,这种需求使得机器人的重复性精度被设计得很高,可以达到0.1毫米以下,但是绝对定位精度很差,可以到2、3毫米,甚至更大[1]。
常见的标定方法可分为三类:一、建立微分运动学模型,然后借助标定工具测量一定数目的机器人姿态,最后用反向求解的方法得到真实值与名义值之间的偏差[2]。
二、使用标定工具获得一系列姿态的数据,然后对数据用线性或非线性迭代求解的方法得到机器人几何参数的修正值[3],[4]。
三、建立机器人运动学模型,用直接测量的方法修正模型参数[5],[6],[7],[8]。
最近,世界著名工业机器人生厂商ABB公司运用了莱卡激光跟踪仪以保证其产品的精度。
使用激光跟踪仪标定机器人不再需要其它的测量工具,从而也就省去了标定测量工具的繁琐工作;同时,这一方法是对机器人的各个运动学几何参数进行修正,结果会使机器人在整个工作空间内的位姿得到校准,而不会像用迭代求解的方法那样,只是对某些测量姿态进行优化拟合,可能会造成在非测量点处残留比较大的误差;再者,随着机器人的机械磨损,机器人的运动学参数需要重新标定,而激光跟踪仪测量系统配置起来简单,特别适合于工业现场标定。
正是鉴于以上优点,本文拟采用激光跟踪仪作为测量工具去修正机器人的运动学参数。
机器人模型的建立:标定对象是ABB 公司生产的6自由度IRB2400/10型串联闭环机器人,测量工具是FARO 公司的X i 型激光跟踪仪,该仪器测量绝对距离的精度为20μm + 1.1μm/m 。
目前被广泛运用的机器人运动学模型是D-H 模型[9]。
为遵从这一模型,要按照如下原则建立坐标系:1. 确定Z i 轴。
基本原则是:Z i 轴沿关节i+1的轴向。
2. 确定原点O i 。
基本原则是:O i 在过Z i-1和Z i 轴的公法线上。
3. 确定X i 轴。
基本原则是:X i 轴过Z i-1和Z i 轴的公法线方向,从Z i-1指向Z i 。
4. 确定Y i 轴。
基本原则是:Y i =Z i ⨯X i ,使坐标系为右手坐标系。
这样就能建立起如图1所示的坐标系系统。
D-H参数的表示:1. 杆件长度i a 定义为从1i Z -到i Z 的距离,沿i X 轴指向为正。
2. 杆件扭角i α定义为从1i Z -到i Z 的转角,绕i X 轴正向转动为正,且规定(,]i αππ∈-。
3. 关节距离i d 定义为从1i X -到i X 的距离,沿1i Z -轴指向为正。
4. 关节转角i θ定义为从1i X -到i X 的转角,绕1i Z -轴正向转动为正,且规定(,]i θππ∈-。
有了这样的定义,可以得到相邻关节之间的齐次变换矩阵:1()()()()i i z i z i x i x i A Trans d Rot Trans a Rot θα-=00001i i i i i i i i i i i i i i i i i c c s s s a c s c c s c a s s c d αααααα-⎛⎫ ⎪- ⎪= ⎪ ⎪⎝⎭,i=(1,2,4,5,6)。
然而,当相邻两根轴线平行或近乎平行时,末端法兰盘的位置误差并不能通过修正D-H 参数来消除。
为了避免这种数值不稳定的奇异性,再引入一个绕Y 轴的转角参数,记作β[10]。
图1 机器人的D-H 模型表4 D-H 参数的修正值1()()()()()i i z i z i x i x i y i A Trans d Rot Trans a Rot Rot θαβ-=, cos 0sin 00100()sin 0cos 00001i i y i i i Rot βββββ⎛⎫⎪⎪= ⎪- ⎪⎪⎝⎭, (i=3)。
最后得到基坐标系到末端法兰盘坐标系的变换矩阵00123456123456A A A A A A A =*****。
标定原理与数据测量:本文做的工作就是获得实际的D-H 参数,为达到这一目的只需要重新建立起机器人的D-H 坐标系,关键是确定各根轴线的相对位置。
在这里采取的方法是让机器人的某一根轴(其余5根轴保持不动)相对于零位位姿作步进转动,根据约束条件,每一姿态法兰盘的中心点都应该位于转动轴的正交平面上,这些点还应该构成一条圆弧,那么过该圆弧圆心的正交平面的法矢量方向(或是相反方向)就是转动轴的轴线方向。
考虑到各种噪声的混入,采取最小二乘的方法去拟合正交平面和圆弧。
为了减小噪声的影响,应该测量尽可能多的目标点。
激光跟踪仪测量系统提供的球体三角锥棱镜和配套使用的安装平台可以方便地实现对激光束的跟踪。
跟踪时,激光束会遇到机器人本体等障碍物的阻挡,所以在末端关节上增加了辅助支架以扩大测量范围。
支架还可以起到增大轴4和轴6的圆弧半径的作用,减小扰动对测量结果的影响。
轴1会影响到基坐标系原点的确定,作用尤为重要,所以调整其余各轴的姿态使轴1能在±180°内转动;由于四杆机构的存在,轴2的转动会使得轴3也相应转动,从而将轴 3 的误差带入到测量结果,为了解决这一问题,可以在连杆2上再设置一个安装平台,这样结果中就不再包含其它轴的影响;激光跟踪仪的测量精度与测量距离有关,因此要在保证一定测量范围的同时尽量减小跟踪仪与机器人间的距离,系统配置如图2所示。
按照表1对机器人进行编程、测量,共获得487组数据。
序号 范围(°) 递增(°)测量点数 1 -180,180 5 72 2 -100,+110 3 70 3 -65,60 1 125 4 -200,200 5 80 5 -120,120 3 80 6-180,180660表1 数据的获得 表2 平面和圆弧的拟合误差 图2 测量系统配置在实际操作中,除了基座标系以外,所有的中间坐标系都能唯一地确定下来。
为了确定基座标系,在这里先简要说明一下机器人的装配过程:在机器人处于零位位姿时进行装配,先用基准尺构造出两个互相垂直的平面(一个水平面和一个竖直面),基平面平行于此水平面,基座标系的Z 轴定义在竖直面内并垂直于水平面,Z 轴和基平面的交点定义成坐标原点,保证各个转轴零角度时安装部件,由坐标原点指向法兰盘中心在基平面上投影点的直线方向定义成X 轴的方向。
由此,按照以下步骤确定基座标系: 1. 确定基平面。
直接使用测球对机器人的安装平面进行测量,尽可能在平面上分布地多取些点,以保证获得平面的真实面貌。
由于安装平面并不与基平面重合或是平行,可以多测量几组,然后挑选出最佳的一组作为基平面。
2. 确定基坐标系的原点。
轴1与基平面的交点作为基座标系的原点。
3. 确定基座标系X 轴的方向。
因为机器人的重复性定位精度很高,所以在建模时也按照机器人在装配时定义X 轴的方法那样确定X 轴方向。
修正结果分析: 所有原始数据采集完成后,利用CAM2 Measure4.0软件对所需要的各种几何特征进行最优拟合,拟合误差如表2所示,修正前后运动学参数的对比见表3和表4。
为了对修正结果进行验证,又另外随机测量了30个点,由表5可以看出,标定之后平均误差较之前改善了41.87%,均方根误差改善了42.44%。
这里的均方根误差RMS =(m=30),r p 为实际坐标向量,n p 为理论计算坐标向量。