挖藕机设计
自走式小型挖藕机的设计

摘要由于莲藕生长在水域较多的地方,所以在我国主要存在于南方地区,那里水域较多气候适宜生存。
同时莲藕有较高的食用和药用价值,在我国被大量种植。
莲藕是一种种植简单但采收难的水生植物,人工采收效率较低,主要有两个方面的问题;第一,生长与水下,人工采收较为困难;第二,现有的莲藕机械采收方式多为半机械化方式,即人+水枪,这种方式虽然效率提高了,但仍然存在采净率低的情况。
主要表现于莲藕出水现象低下,很多成熟的莲藕由于没有喷出而堵在土壤中腐烂掉。
同时,人工水枪需要在水下工作,致使健康问题得不到保障。
并且这种方式成本较高,经调查,请用人工水枪挖藕每天花费300元左右,这对于很多农名来说是一笔很大的开销。
所以,现在市场迫切需要一种成本低并且能提高莲藕采收率的机器出现。
当前莲藕采收机械大多是喷流式机械,这种形式的挖藕机继承了传统的人工采收方式,并且采用机械代用人工进行,虽然提升了效率,但还是不能很大限度的提升,所以为更大程度的提高挖藕效率,本文中介绍了一种在水下挖藕采莲的自走式机械,最大的方式是采用挖藕铲刮土器和拨藕轮对莲藕进行采收,这种方式摆脱了传统的用喷水式采收莲藕,大大提升了藕农的采莲效率,同时工作过程中藕农坐在机器上进行工作,这样避免了长时间泡在水下对身体的损伤,也使得莲藕采收得到了保障。
关键词:莲藕;挖藕效率;机械式;水下采1绪论1.1课题研究背景和意义莲藕是一种特别有意义的水生植物,它不仅可以食用而且可以药用,在我国它通常还有很多象征意义,“出淤泥而不染”比喻“清高”,还有比喻爱情的“藕断丝连”等等。
所以他在人们心中具有很好的口碑,但是坊间流传“莲藕好吃挖藕难”确实令很多人不免有些失望。
在我国莲藕已经有3000多年历史了,从出现到人们对它的挖掘一直以来困扰着很多人,在我国南方地区有很大一部分莲藕生长区,特别是湖北地区为全国之最,即使现在人们在采莲上面已经做出了很多的优化,比如人+水枪式的采莲器械,这种方式的出现对采莲产生了很大的帮助。
莲藕收割机打捞装置设计思路

莲藕收割机打捞装置设计思路1.打捞器:打捞器是用于捞取莲藕的部件。
它由一个大型的铲斗组成,可以在水中将藕根挖起并装入切割器。
打捞器需要有足够的结构强度和稳定性,以确保在水中的稳定工作。
2.切割器:切割器是用于将莲藕切断的部件。
它由一个旋转刀具组成,可以将藕根自动切割成适当的长度。
切割器需要具备高速旋转、精准切割的能力,并且要保证切割过程中的安全性。
3.输送带:输送带是用于将捞起的莲藕输送到指定位置的部件。
它由一个带材和一个传动装置组成,可以将切割好的藕根顺利地输送到收集装置或指定位置。
输送带需要具备稳定的运行和可调速的功能,以适应不同工作环境的需求。
4.控制系统:控制系统是用于控制整个装置运行的部件。
它由传感器、执行器和控制器组成,可以实现对打捞器、切割器和输送带的自动控制。
控制系统需要具备精确的控制能力,可以根据设定的工作参数进行自动调整,并能够实时监测设备的运行状态。
在实际设计中,还需要考虑以下几个关键问题:1.工作效率:莲藕收割机打捞装置的主要目标是提高莲藕的采收效率。
因此,在设计过程中需要充分考虑每个部件的工作效率和协同性,以确保整个装置的高效率工作。
2.安全性:莲藕收割机打捞装置需要在水中进行工作,因此安全性是一个非常重要的考虑因素。
在设计过程中需要确保打捞器和切割器的安全性能,以避免工人在操作过程中受到伤害。
3.可靠性:莲藕收割机打捞装置需要长时间稳定地工作,在设计过程中需要选择高品质的部件和材料,并进行严格的工艺控制,以确保整个装置的可靠性。
4.可维护性:莲藕收割机打捞装置需要定期维护和保养,因此在设计过程中需要考虑到设备的便捷维护性,如易于清洁、易于更换损坏的部件等。
5.环保性:莲藕收割机打捞装置需要在水中工作,因此需要注意对水环境的保护。
在设计过程中要采用环保材料和技术,以减少对水环境的污染。
总之,莲藕收割机打捞装置的设计思路主要围绕着提高工作效率、确保安全性、保证可靠性、提高维护性和注重环保性等方面展开,以满足用户需求,并在实际工作中发挥最大的作用。
莲藕采摘机设计方案及流程

莲藕采摘机设计方案及流程
内容:
一、设计目的
莲藕采摘机旨在提高莲藕的采摘效率,减轻农民的劳动强度。
二、设计方案
1. 采用crawler 摇臂式采摘机构,通过履带在田间行走,利用机械臂采摘莲藕。
2. 机械臂末端配置真空吸盘,可以吸住莲藕进行采摘。
真空吸盘采用软质材料,不会损伤莲藕。
3. 配置导航和避障系统,机器人可以根据预设路线自动在田间行走并避开障碍物。
4. 采摘后的莲藕通过传送带进入收集箱,由操作员进行整理分类。
三、设计流程
1. 调研:了解莲藕生长环境和采摘作业流程,确定设计指标。
2. 概念设计:根据指标要求提出多个设计方案,评估各方案优劣,确定最优设计思路。
3. 方案设计:进行机构设计、运动学分析、动力计算等,完善设计方案。
4. 详细设计:确定各关键部件的尺寸、材料、加工工艺等详细参数。
5. 仿真验证:通过三维建模和仿真分析,验证设计方案的可行性。
6. 原型制作与测试:制作原型机进行功能测试,根据测试结果优化设计。
7. 批产与应用:完成批产准备工作,装配调试产品,推广应用。
4CWO-3.2型船式挖藕机的研制

对泥土进行冲刷切割粉碎效果较好 ,故最终选定水泵型号为 6H 6型离心泵 ,其流量为 16 3 ,扬程 8 n S一 2 m/ h 4l ,满足作业 需求。但对轴功率需求较大 ,达 4 k 0 W。与之配合的动力经 选择最终确定为 Q 4 0 ( I C 9 D )型直喷式柴油机 ,最大扭矩及 相应转速为 19 N n和 24 r i, 4. ・ 7 l 20/ n 标定功率为 4. W。 m 5k 6
喷头安装角度 :向下倾斜 4 。 ,调节范 围为 ±1。 ; 5 0 喷头高度调节范 围:0~1 0 n 0n l 3 l 喷头往复运动频率 :01 ~ . . 01 0 7次 / s 喷孔直径 : 1 ~ 1 m 3 6m 管路工作压力 :0 ~0 a . .MP 4 7
张 国忠
夏俊 芳
周 勇
许绮 J
1 1 3 5 41 1 1 09 2 11
结 构见 图 1 。
2 1 1 1 6 0 9 8 71
0 引 言 有关资料显示 , 国莲藕种植面积已达 40多万 h 2 我 0 m;
湖北省莲藕种植面积约 1 万 h z 0 m 。随着农村产业结构调整 , 莲藕种植面积仍呈扩大趋势 ,特别是集 中连片 的人工栽 培 图 1 船式 自动挖藕机结构简图
足作业要求。
33 喷 嘴 . 喷嘴设计包 括喷嘴直径 、喷嘴形状 、喷嘴工作 角度 、
维普资讯 http://w藕机的研制
华 中农 业 大学 工程技 术 学院 黄 海 东
摘要 :针对我 国莲藕 生产 的实际 ,如挖 藕 困难 、劳 动强度 大 ,研制 了适应藕 田 、藕塘 、湖 区的船 式挖藕机 , 利用高压水柱对泥土进行切割 、粉碎 、推移 ,使净藕 自动 浮出水面 ,提高 了挖藕效率 ,解决 了挖藕难题 。 关键词 :收获机械 ;船式 ;莲藕
圆周往复水射流式挖藕试验装置设计与试验
圆周往复水射流式挖藕试验装置设计与试验
玉苏甫江·艾米都力;张佳;潘江如;郭辉;佟灵茹;朱军
【期刊名称】《农机化研究》
【年(卷),期】2024(46)2
【摘要】为满足莲藕采挖作业多样化的试验要求,提高试验装置的互换性、通用性与测量精度,设计了圆周往复水射流式挖藕试验装置。
介绍了试验装置中试验台的结构设计、工作原理和关键部件设计,分析了圆周往复水射流结构在不同条件的挖掘深度及莲藕浮出率等,确定了试验指标,并进行了台架验证试验。
结果表明:圆周往复水射流式挖藕试验装置能够有效反映喷头直径、喷射角度和喷头与泥土表面距离对莲藕采挖效果和挖掘深度的影响。
当喷头直径不变时,喷射角度越小挖掘深度越深,喷头与泥土表面距离越小挖掘深度越深,喷射角度越大冲刷面积越大,成正比例关系;喷头与泥土表面距离越近、喷射角度越小情况下莲藕的浮出率越高,满足圆周往复水射流式挖藕试验要求。
【总页数】7页(P70-76)
【作者】玉苏甫江·艾米都力;张佳;潘江如;郭辉;佟灵茹;朱军
【作者单位】新疆农业大学机电工程学院;新疆工程学院机电工程学院;新疆鑫力同机械制造有限公司
【正文语种】中文
【中图分类】S225.92;S237
【相关文献】
1.螺旋推进式挖藕机的设计与试验
2.自进式动平衡围压水射流钻孔试验装置设计与试验
3.弹簧阀往复试验装置的设计
4.一种小型疲劳试验装置往复扭转机构的设计
5.手扶水力冲刷式挖藕机设计与试验
因版权原因,仅展示原文概要,查看原文内容请购买。
CDIO开题报告(挖藕机的设计与制造)
CDIO 项目开题报告
机械工程学院
机械工程及自动化系 制
姓 名: 陈宇超 林润达 汪杰 孙浩熙 导 师: 金悦老师 题 目: 《挖藕机的设计与制造》
班 级: 机械工程学院 机自11班
填写时间: 2013 年 7月 20日
机械工程及自动化专业本科生CDIO项目开题报告
填写说明及管理规定
CDIO项目开题报告是做好项目的基础。
为了加强机械工程及自动化系本科生CDIO项目过程质量监控,提高项目实施质量,要求在校本科生在第二学年小学期结束前完成CDIO项目开题报告。
一、学生在进行市场调研和查阅文献资料的基础上,以项目小组为单位,填写完成本开题报告。
二、项目指导教师根据开题报告,就项目前期的市场调研、文献评述、研究方案、可能遇到的问题及是否同意开题等写出结论性的审查意见并签名。
三、本报告采用A4纸双面打印,左侧装订成册,各栏空格不够时,请自行加页。
本表可在机械工程学院网站/下载。
四、本报告提交后由学院归档。
通过调研得知,采用这种喷流式冲刷淤泥来实现挖藕目的所需的水流量为100m 左右,藕所能承受的最大抗压强度为4.5×105 N/㎡,ρgH≤4.5×105N/㎡,计算。
莲藕收割机打捞装置设计思路
莲藕收割机打捞装置设计思路莲藕是一种常见的水生植物,具有丰富的营养价值和药用价值。
在莲藕种植过程中,收割是一个非常重要的环节。
为了提高莲藕的收割效率和质量,设计一种莲藕收割机打捞装置是非常必要的。
莲藕收割机打捞装置的设计思路主要包括以下几个方面:1. 设备结构设计:莲藕生长在水中,因此莲藕收割机打捞装置需要具备在水中操作的能力。
设备结构应该合理,具有足够的稳定性和可靠性。
可以采用船体结构,配备稳定的浮力装置,保证设备在水中平稳运行。
2. 收割刀具设计:莲藕生长在水底泥沙中,收割刀具需要具备一定的穿透力和切割能力。
可以采用锋利的刀片设计,以提高收割效率。
同时,刀片的材质也需要考虑到莲藕的特性,避免对莲藕造成损害。
3. 传动系统设计:莲藕收割机打捞装置需要具备一定的移动能力,以便在水中进行收割作业。
传动系统设计应该考虑到设备的移动速度和操作灵活性。
可以采用液压传动系统,通过液压驱动设备行进和切割操作。
4. 控制系统设计:莲藕收割机打捞装置需要具备一定的自动化控制功能,以便实现对设备的精确控制和操作。
控制系统可以采用电气控制系统,通过电子设备实现对设备的控制和监测。
莲藕收割机打捞装置的工作流程如下:将莲藕收割机打捞装置放入水中,并启动传动系统,使设备开始在水中移动。
同时,刀具也开始旋转,准备进行收割作业。
然后,当设备接近莲藕时,刀具开始切割莲藕的根部。
切割刀具通过液压驱动,具备一定的穿透力和切割能力,可以快速切割莲藕的根部,并将其分离出来。
接着,当莲藕被切割分离后,收割机打捞装置的浮力装置会将莲藕浮起,方便后续的收集和处理。
当设备完成一定区域的收割作业后,可以通过控制系统将莲藕收割机打捞装置移动到下一个收割区域,继续进行后续的收割作业。
莲藕收割机打捞装置的设计思路主要是为了提高莲藕的收割效率和质量。
通过合理的设备结构设计、锋利的收割刀具设计、稳定的传动系统设计和精确的控制系统设计,可以实现对莲藕的高效收割和打捞。
农用采藕机主要技术参数及配置
农用采藕机主要技术参数及配置、性能指标
项目规格数值cm03
外形尺寸1500*1010*700mm
结构质量90kg
结构形式船载往复水枪式
配套动力7.5马力、13马力
作业幅度 2.6m
适水深度0.3—1 m
挖掘深度30-60cm
纯工作小时生产率2000kg/8小时
明藕率≥96
伤藕率≤3
破皮率≤4
本机操作简单,156/68/186/307工作时浮于藕田水面,只需轻轻推动,即可逐片采藕,故工作效率高,节省人力物力成本。
每台平均每日收获2000斤以上。
本款挖藕机经多年销售实验多次升级改装形成现在第四代挖藕机,挖深40公分以上,吃水10公分,重量80公斤,有7.5马力和13马力两种配置。
挖藕机设计-任务书
毕业设计任务书
论文(设计)
挖藕机的设计
课题名称
学生姓名院(系)工学院专业班级
指导教师职称教授学历博士研究生
毕业设计要求:
1、在设计过程当中,要求态度端正,积极主动,认真细心;
2、查阅大量的文献资料,按时完成设计任务;
3、绘制零部件、各机构总装配图毕业设计;
4、按要求完成设计说明书完成word文档(说明书7000—10000字,说明书撰写格式详
见工学院网站,毕业设计有关内容),并打印装订成册;
5、通过设计实践,使进一步了解一般机械设计的设计过程,培养学生综合运用机械设计
原理分析问题和解决问题的能力,从中掌握方案设计的方法和步骤。
毕业设计内容与技术参数:
1.设计挖藕机的框架结构,包括浮桶的设计、工作仓的设计、操作架的设计、动力
选择及辅助装置等。
2.相关装配要求参照机械设计手册,采用全焊接形式。
3.绘制三维图,以三维图检验机构的可行性。
4.绘制主要零件图,总装配图等,折算后共2张A0号图纸。
5.制作手工模型,并进行实际实验。
毕业设计工作计划:
2012.12.01—2013.01.15 分析设计方案,查阅相关资料。
2013.01.16—2013.02.28 绘制设计方案图,查阅设计的相关资料,确定相关的技术参
数编辑整个设计方案的思路。
2013.03.01—2013.05.08 完善设计图纸,整理设计说明书,最后完成定稿。
2013.05.09—2013.05.10 完成手工模型的制作,并进行水中实验,录制视频。
接受任务日期:年月日要求完成日期:年月日学生签名:
指导教师签名:院长(主任)签名:。
莲藕采摘机设计方案及流程
莲藕采摘机设计方案及流程英文回答:Lotus Root Harvesting Machine Design Scheme and Process.The lotus root harvesting machine is a kind of agricultural machinery used for harvesting lotus roots. Itis mainly composed of a frame, a digging device, aconveying device, a cleaning device, and a driving device. The working principle of the lotus root harvesting machineis to use the digging device to dig out the lotus rootsfrom the soil, and then convey the lotus roots to the cleaning device through the conveying device. The cleaning device cleans the lotus roots and removes the soil andother impurities on the surface of the lotus roots. Finally, the driving device drives the various components of thelotus root harvesting machine to work.The design of the lotus root harvesting machine should meet the following requirements:High efficiency: The lotus root harvesting machine should have a high harvesting efficiency to reduce the labor intensity of the farmers.Low damage rate: The lotus root harvesting machine should have a low damage rate to ensure the quality of the lotus roots.Easy to operate: The lotus root harvesting machine should be easy to operate and maintain.The process of harvesting lotus roots with a lotus root harvesting machine is as follows:1. The lotus root harvesting machine is driven into the lotus pond.2. The digging device of the lotus root harvesting machine digs out the lotus roots from the soil.3. The conveying device conveys the lotus roots to thecleaning device.4. The cleaning device cleans the lotus roots and removes the soil and other impurities on the surface of the lotus roots.5. The driving device drives the various components of the lotus root harvesting machine to work.中文回答:莲藕采摘机设计方案及流程。
4CWO-26型船式挖藕机研制使用情况调研材料船式挖莲藕机
4CWO-2.6型船式挖藕机将动力机械、高压水泵、喷射装置、挖藕支架、行走控制系统、液压操作机构与船身有机融为一体,使船体悬浮或半悬浮于水中,在船内完成吸水、加压喷射、挖深控制、行走等全部工序,其先进性、适用性、可靠性、安全性都比较强。
该产品于2004年5月研制成功,其后不断改进完善,现已获得三项国家专利,是国内比较先进的船式挖藕机械。
目前已生产20余台,主要在**湖周边地区及济南等地推广使用,用户普遍反映机具性能较好。
一、研制情况我国莲藕种植面积6000多万亩,平均亩产1500千克。
**湖地区莲藕种植区域广,产量高,成本低,经济效益显著,现有总面积11.5万亩(其中人工种植浅水藕面积1.5万亩)。
人工收获莲藕劳动强度大,效率低,错过收获季节就在污泥中烂掉,造成资源浪费。
据统计,人工采挖1千克费用支出0.8元,亩费用1200元,船式挖藕机采挖效率是人工的近20倍,亩均费用仅为人工的一半,藕农寻求挖藕船十分迫切。
4CWO-2.6型船式挖藕机在研制过程中,重点抓好了以下四个方面的研究:1、挖藕方式的研究。
人工采挖大多借助一些铁制工具除去表土,用脚蹬掉莲藕表面泥土的方法。
如果采用挖掘铲或爪的形式,极易造成莲藕损伤,藕体进入污泥减少经济价值。
而在船尾安装位置可调的高压水枪,利用机械动力使挖藕支架底部减速机旋转,带动铲泥板将莲藕上方的泥土拨动,同时利用高压水枪产生的水柱冲击力,进行破泥、冲刷藕体,使其浮上水面,采用这样的挖藕方式莲藕破损率很小。
2、高压水柱形成的研究。
使用动力机械带动高压水泵,由船两弦经过滤网吸入水源,经高压水泵加压后,通过高压水管至挖藕支架前端均匀分配各水枪头,形成高压水柱。
3、行走控制系统的研究。
利用高压水枪冲击水面形成的反冲力,推动船体前进。
左右方向的调整采用人工及附属工具调整。
4、喷头调节的研究:喷头调节分为上下、前后调节,通过调节挖藕支架完成。
液压泵推动支架内减速机曲轴旋转,带动铲泥板和喷头前后移动,铲掉藕上泥土,藕通过高压水柱的冲洗浮上水面。
水田环境下自走式智能莲藕采收机械的设计研究
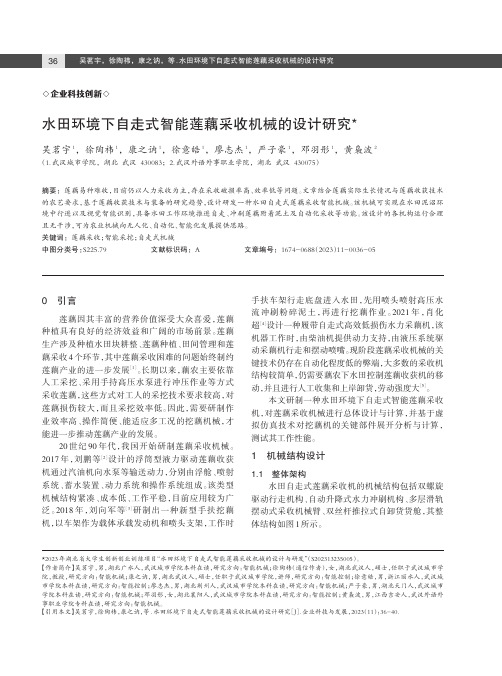
0引言莲藕因其丰富的营养价值深受大众喜爱,莲藕种植具有良好的经济效益和广阔的市场前景。
莲藕生产涉及种植水田块耕整、莲藕种植、田间管理和莲藕采收4个环节,其中莲藕采收困难的问题始终制约莲藕产业的进一步发展[1]。
长期以来,藕农主要依靠人工采挖、采用手持高压水泵进行冲压作业等方式采收莲藕,这些方式对工人的采挖技术要求较高,对莲藕损伤较大,而且采挖效率低。
因此,需要研制作业效率高、操作简便、能适应多工况的挖藕机械,才能进一步推动莲藕产业的发展。
20世纪90年代,我国开始研制莲藕采收机械。
2017年,刘鹏等[2]设计的浮筒型液力驱动莲藕收获机通过汽油机向水泵等输送动力,分别由浮舱、喷射系统、蓄水装置、动力系统和操作系统组成。
该类型机械结构紧凑、成本低、工作平稳,目前应用较为广泛。
2018年,刘向军等[3]研制出一种新型手扶挖藕机,以车架作为载体承载发动机和喷头支架,工作时手扶车架行走底盘进入水田,先用喷头喷射高压水流冲刷粉碎泥土,再进行挖藕作业。
2021年,肖化超[4]设计一种履带自走式高效低损伤水力采藕机,该机器工作时,由柴油机提供动力支持,由液压系统驱动采藕机行走和摆动喷嘴。
现阶段莲藕采收机械的关键技术仍存在自动化程度低的弊端,大多数的采收机结构较简单,仍需要藕农下水田控制莲藕收获机的移动,并且进行人工收集和上岸卸货,劳动强度大[5]。
本文研制一种水田环境下自走式智能莲藕采收机,对莲藕采收机械进行总体设计与计算,并基于虚拟仿真技术对挖藕机的关键部件展开分析与计算,测试其工作性能。
1机械结构设计1.1整体架构水田自走式莲藕采收机的机械结构包括双螺旋驱动行走机构、自动升降式水力冲刷机构、多层滑轨摆动式采收机械臂、双丝杆推拉式自卸货货舱,其整体结构如图1所示。
水田环境下自走式智能莲藕采收机械的设计研究*吴茗宇1,徐陶祎1,康之讷1,徐意皓1,廖志杰1,严子豪1,邓羽彤1,黄枭波2(1.武汉城市学院,湖北武汉430083;2.武汉外语外事职业学院,湖北武汉430075)摘要:莲藕易种难收,目前仍以人力采收为主,存在采收破损率高、效率低等问题。
莲藕挖掘机演示课件

02
莲藕挖掘机的工作流程
挖掘前的准备工作
01
02
03
确定挖掘区域
根据莲藕种植区域,确定 挖掘的范围和深度。
检查机器状态
确保莲藕挖掘机处于良好 工作状态,检查发动机、 液压系统、刀具等部件是 否正常。
清理障碍物
在挖掘前,需要清理区域 内的杂草、石块等障碍物, 以确保挖掘顺利进行。
莲藕挖掘的具体步骤
根据挖掘物料的不同,合理调整铲斗和刀片的尺寸和角度,以实现 高效挖掘。
保持稳定的工作速度
在挖掘过程中,保持稳定的工作速度,避免忽快忽慢,以提高挖掘 效率。
常见问题及解决方案
发动机故障
如发动机无法启动或运行不稳定,可能是由于油路或电路 问题引起,需检查油路和电路系统,并确保发动机处于良 好状态。
液压系统故障
定位与切割
根据莲藕生长情况,调整 挖掘机的位置和刀具的角 度,进行切割。
挖掘与输送
通过挖掘机的液压系统, 将莲藕从土壤中挖掘出来, 并输送至机器的收集箱中。
深度控制
在挖掘过程中,需要控制 挖掘深度,以确保莲藕完 整且不损伤其他植物。
挖掘后的整理工作
清理残留物
挖掘结束后,需要清理残留的土 壤、杂草等物质,保持挖掘区域
好无损。
遵守操作规程
严格按照莲藕挖掘机的操作规程 进行操作,不得违规操作或超负
荷作业。
定期维护保养
按照制造商的推荐,定期对莲藕 挖掘机进行维护保养,确保机械
始终处于良好状态。
高效挖掘方法
选择合适的工作模式
根据挖掘作业需求,选择合适的挖掘模式,如浅挖、深挖、破碎 等,以提高工作效率。
合理调整铲斗和刀片
的整洁。
检查与维护
慧鱼组莲藕收割机打捞装置设计思路

慧鱼组莲藕收割机打捞装置设计思路以慧鱼组莲藕收割机打捞装置设计思路为标题的文章随着农业机械化的发展,农作物的收割过程越来越依赖于机械设备。
莲藕是一种常见的水生植物,其种植面积逐年增加。
然而,莲藕的收割一直是一个较为困难的问题,由于莲藕根系较为复杂,并且生长在深水中,传统的收割方法往往效率低下。
为了解决这一问题,慧鱼组设计了一种莲藕收割机打捞装置,有效提高了莲藕的收割效率。
莲藕收割机打捞装置的设计思路主要包括以下几个方面:1.装置结构设计:莲藕收割机打捞装置由机械臂、刀具、输送带和控制系统组成。
机械臂负责将刀具下移到水中,切割莲藕的茎部。
刀具采用锯齿形状,以便更好地切割莲藕。
切割后的莲藕通过输送带送至收集容器中。
控制系统用于控制机械臂的运动和刀具的切割力度。
2.机械臂设计:机械臂是莲藕收割机打捞装置的核心部件,其设计应考虑到莲藕生长的特点。
机械臂应具有足够的强度和稳定性,以承受切割莲藕时的力度和水流的冲击。
同时,机械臂的长度和角度应能够适应不同水深和莲藕生长的位置。
3.刀具设计:刀具的设计应考虑到莲藕的硬度和茎部的结构。
锯齿形状的刀具能够更好地切割莲藕,减少切割时的阻力。
刀具的材质应选择耐磨损和耐腐蚀的材料,以确保刀具的使用寿命和切割效果。
4.输送带设计:输送带的设计应考虑到切割后莲藕的输送和收集。
输送带应具有足够的强度和稳定性,以承受切割后莲藕的重量和水流的冲击。
同时,输送带的速度和角度应能够适应切割的效率和莲藕的生长情况。
5.控制系统设计:控制系统是莲藕收割机打捞装置的关键部分,其设计应考虑到机械臂和刀具的运动控制。
控制系统应具有精确的位置控制和力度控制功能,以确保切割的准确性和效率。
同时,控制系统应具备自动化和远程控制的功能,提高操作的便利性和安全性。
通过以上的设计思路,慧鱼组设计了一种莲藕收割机打捞装置,能够有效解决莲藕收割难题。
该装置具有结构合理、操作简便、收割效率高等特点。
未来,随着农业机械化的发展,莲藕收割机打捞装置将在莲藕种植领域发挥重要作用,提高莲藕的产量和质量,促进农业的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要藕,它的根根叶叶,花须果实,无不为宝,都可滋补入药,而且莲藕的种植技术非常简单,产量高,成本低,但是莲藕是难收的农场品。
自古以来,采挖莲藕的工作主要靠人工一锹一铲来完成,在采挖莲藕时需要将莲藕田中水排干,这种方式采挖莲藕效率低,莲藕损伤严重。
据统计每年因采挖不及时或者无法采挖而造成的损失就达亿元。
现阶段,莲藕在我国的种植面相当广,并且种植面积还在不断的扩大,我国现有莲藕种植面积6000多万亩,平均亩产1500千克。
因莲藕经济效益高,但采挖困难,因此广大藕农就希望能有挖藕机来代替人工采挖莲藕,来减轻人工劳动,并提高莲藕质量。
近年来,不少单位已经进行了挖藕机的研制工作,并且也取得了一定的成效。
但是,国内的挖藕机产品存在机器笨重、工作不稳定、挖藕效果不理想等问题,且大部分挖藕机都以挖掘湖藕为主,不适宜浅水藕种植地区。
如果能够开发出一种高效、灵活且造价低廉的浅水藕田挖藕机产品,将会大大加快莲藕产业发展。
本文正是基于这种想法,设计了喷头可移动浮桶式水力挖藕机。
查阅有关挖藕机资料[15-19]的基础上,分析了不同挖藕机的优缺点,提出了浮桶式与可移动高压喷头冲藕的设计方案。
并绘制了该挖藕机所有零部件的CAD图纸和PROE装配效果图,采用标准化零部件提高机器的标准化程度,为该挖藕机批量生产及进一步开发与推广奠定基础。
关键词:藕;挖藕机;浮桶式;机械设计;高压喷头AbstractLotus root, its leaf, and the flower fruit, are all treasure, and can be used as a piece of nourishing medicine. The lotus root planting technique is simple, yet with high yield, and low cost, but the lotus is difficult to collect as farm products. Since ancient times, lotus root digging mainly relies on manual labor with a spade and a shovel, and during the process of digging, the water needs to be drained, and thus the efficiency is low, and can cause serious damages. According to statistics, due to delayed or inappropriate excavation, a few billion Yuan can be caused every year. At present, the lotus root planted in China is quite large in number, and the planting area is still expanding, our existing lotus root planting area is about 60000000 mu, with the average yield of 1500 kilogram per-mu. Though lotus root yields high economic returns, to dig it out of water is very difficult, therefore the majority of farmers would like to have a kind of lotus root digging machine to replace spade and shovel, reduce the manual labor, and improve the quality of lotus root. In recent years, many relevant institutions have carried out research work of the lotus root digging machine, and achieved some success. However, the machine still has some problems, like unstable work, unsatisfying digging effect, and most of the lotus root digging machines are used mainly for digging lotus roots in the lake, and thus not suitable for shallow water lotus roots. If we can develop a lotus root digging machine with high efficiency, flexibility and low cost for shallow water lotus, it will greatly accelerate the development of lotus industry. This article is based on this idea, so designed the nozzle movable float type hydraulic lotus root digging machine. Based on relevant data about the lotus root digging machine, analyzes the advantages and disadvantages of different lotus root digging machine, and thus comes up with the idea of the float movable high pressure nozzle lotus design. Using CAD and PROE pictures to show assembly effect of the lotus root digging machine and all its parts, and standardized parts and components to enhance the degree of standardization of the digging machine, lay the foundation for production and further development and promotion of lotus root machine.Keywords: lotus root; lotus root digging machine; float; mechanical design; high pressure nozzle目录摘要 (I)Abstract.................................................................................................................................... I I 1 绪论 . (1)1.1 本论文研究的目的与意义 (1)1.2 现阶段国内挖藕机械的研究状况及存在的问题 (1)1.3 莲藕的物理特性及急需解决的关键性问题 (2)1.3.1 莲藕的物理特性 (2)1.3.2 急需解决的关键性问题 (3)1.4 本论文研究内容、方法及方向 (3)1.4.1 研究内容 (3)1.4.2 研究方法 (3)1.4.3 研究方向 (3)2 确定可移动喷头浮桶式挖藕机总体设计方案 (4)2.1 挖藕机设计方案 (4)2.2 可移动喷头浮桶式挖藕机结构组成 (4)2.3 可移动喷头浮桶式挖藕机工作流程 (5)3 汽油机水泵的选择与计算 (6)3.1 水泵类型的确定 (6)3.2 水泵扬程及流量的确定 (7)3.3 压力损失的计算 (8)3.3.1 管道的沿程压力损失 (8)3.3.2 高压喷嘴压力损失 (11)3.3.3 管接头、分水器及其他部件局部损失计算 (12)4 挖藕机主要工作部分的设计 (13)4.1 动力水泵室的设计 (13)4.1.1 动力水泵室形状确定 (13)4.1.2 确定动力水泵室制作材料 (14)4.1.3 确定动力水泵室制作工艺 (14)4.2 密封浮桶的设计 (15)4.2.1 密封浮桶形状的设计 (15)4.2.2 密封浮桶材料及制作工艺的确定 (16)4.3 滤网的选择 (16)4.4 泵机固定架材料的确定 (16)4.5 抬杆及操作杆材料的确定 (17)4.6 汽油机水泵固定架材料及位置的确定 (18)4.6.1 汽油机水泵固定架材料的确定 (18)4.6.2 汽油机水泵固定架位置的确定 (18)4.7 进水管、高压管的选择 (19)4.8 高压喷嘴固定架 (20)5 挖藕机总质量、浮力计算及抬杆强度校核 (21)5.1 挖藕机总质量 (21)5.2 浮力计算 (21)5.3 抬杆强度校核 (22)6 挖藕机3D外观图 (24)7 总结 (26)参考文献 (27)致谢 (28)1 绪论1.1 本论文研究的目的与意义莲藕是一种种植技术简单、产量高、成本低、经济效益好,具有很高食用、药用价值的特色农产品,也是一种易种难收的农产品。
自古以来,莲藕的采挖主要靠人工一锹一铲的完成,不仅劳动强度极大,作业环境特别恶劣,而且挖净率低,藕的损伤严重,商品质量差。
同时,还需排干藕田、堰塘中的水,像湖区挖藕也只能在周边无水处进行。
因此,需要花费很大的人力、物力及能源,造成大面积湖区莲藕的浪费。
据统计,仅湖北洪湖每年因采挖不及时或无法采挖而造成莲藕自生自灭的损失达亿元以上。
随着农业产业结构的调整,我国的莲藕种植面积仍在不断的扩大,据不完全统计,全国已有莲藕种植面积6000多万亩。
但其挖掘方法仍然停留在原始的生产方式上,因此,广大藕农和莲藕主产区都迫切希望能有挖藕机械的出现来替代人工劳动。
挖藕机的出现,给莲藕产业带来的经济效益是巨大的,据调察,全国平均人工采挖莲藕的费用在0.5元/斤,而采用挖藕机的综合费用不到0.05元。
整整相差了十倍,莲藕销售旺季,以湖北为例,莲藕的销售价格一般在一元左右,仅是挖藕费用就占去了收益的一半。