伺服驱动器MR-J2S-70A参数设置
三菱伺服系统型号及功能参数

三菱伺服系统型号及功能参数三菱伺服系统型号及功能参数三菱伺服系统型号⼤全MR-J2S系列伺服电机伺服驱动器HC-KFS13 /MR-J2S-10AHC-KFS23 /MR-J2S-20AHC-KFS43 /MR-J2S-40AHC-KFS73 /MR-J2S-70AHC-SFS52 /MR-J2S-60AHC-SFS102 /MR-J2S-100AHC-SFS152 /MR-J2S-200AHC-SFS202 /MR-J2S-200AHC-SFS352 /MR-J2S-350AHC-SFS502 /MR-J2S-500AHC-SFS702 /MR-J2S-700AMR-J3系列HF-KP13 /MR-J3-10AHF-KP23 /MR-J3-20AHF-KP43 /MR-J3-40AHF-KP73 /MR-J3-70AHF-SP52 /MR-J3-60AHF-SP102 /MR-J3-100AHF-SP152 /MR-J3-200AHF-SP202 /MR-J3-200AHF-SP352 /MR-J3-350AHF-SP502 /MR-J3-500AHF-SP702 /MR-J3-700AMR-E系列HF-KE13 /MR-E-10AHF-KE23 /MR-E-20AHF-KE43 /MR-E-40AHF-KE73 /MR-E-70AHF-SE52 /MR-E-70AHF-SE102 /MR-E-100AHF-SE152 /MR-E-200AHF-SE202 /MR-E-200A伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC三菱伺服电机的分类交流伺服系统分类:主要的系列有:MR-J、MR-H、MR-C系列;MR-J2系列;MR-J2S系列;MR-E系列;MR-J3系列;MR-ES系列。
伺服电机驱动器参数设置及编码器替代技巧
伺服电机驱动器参数设置方法及编码器替代技巧伺服电机驱动器的正确使用除按用户手册正确设置参数外,还应结合使用现场和负载情况,灵活操作。
同样,维修伺服电机系统除采用同型号的部件进行替代外,也可以对原设备的功能、信号分析后,使用不同型号部件进行替代。
现将有关资料供给读者参考。
一、伺服电机编码器替代技巧从结构上讲,伺服系统分为三部分:伺服电机、编码器、驱动器。
伺服电机的精度取决于编码器,故障也常见于这三方面。
由于技术、利益等关系,各厂家所生产的配件不可代替,而进口配件的渠道不很畅通,造成维修上很大困难。
我们可以通过对其测量,分析研究工作原理,尝试采用替换的方法进行维修。
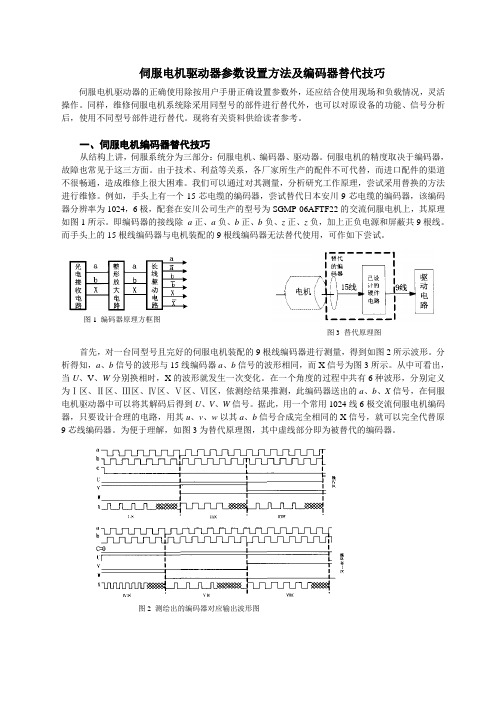
例如,手头上有一个15芯电缆的编码器,尝试替代日本安川9芯电缆的编码器,该编码器分辨率为1024,6极,配套在安川公司生产的型号为SGMP-06AFTF22的交流伺服电机上,其原理如图1所示。
即编码器的接线除a正、a负、b正、b负、z正、z负,加上正负电源和屏蔽共9根线。
而手头上的15根线编码器与电机装配的9根线编码器无法替代使用,可作如下尝试。
图1 编码器原理方框图图3 替代原理图首先,对一台同型号且完好的伺服电机装配的9根线编码器进行测量,得到如图2所示波形。
分析得知,a、b信号的波形与15线编码器a、b信号的波形相同,而X信号为图3所示。
从中可看出,当U、V、W分别换相时,X的波形就发生一次变化。
在一个角度的过程中共有6种波形,分别定义为Ⅰ区、Ⅱ区、Ⅲ区、Ⅳ区、Ⅴ区、Ⅵ区,依测绘结果推测,此编码器送出的a、b、X信号,在伺服电机驱动器中可以将其解码后得到U、V、W信号。
据此,用一个常用1024线6极交流伺服电机编码器,只要设计合理的电路,用其u、v、w以其a、b信号合成完全相同的X信号,就可以完全代替原9芯线编码器。
为便于理解,如图3为替代原理图,其中虚线部分即为被替代的编码器。
图2 测绘出的编码器对应输出波形图其次,依据测绘及原理分析,设计电路。
伺服参数调节原则与方法

一.伺服驱动器对伺服电机的主要控制方式?位置控制、速度控制和转矩控制。
位置控制方式的特点:(机床设备等)是驱动器对电机的转速、转角和转矩均于控制,CNC对驱动器发脉冲串进行转速与转角的控制,输入的脉冲频率控制电机的转速,输入的脉冲个数控制电机旋转的角度。
脉冲频率f与电机转速n(rpm)、脉冲个数P与电机旋转角度β的关系参见下式:式中:G—电子齿轮比速度控制方式的特点:(传送带设备等)是驱动器仅对电机的转速和转矩进行控制,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机的转速。
电机的转角由CNC取驱动器反馈的A、B、Z编码器信号进行控制。
转矩控制方式的特点:(收放卷设备等)是驱动器仅对电机的转矩进行控制,电机输出的转矩不随负载改变,只听从于输入的转矩命令,CNC对驱动器发出的是模拟量(电压)信号,范围为+10V~-10V,正电压控制电机正转,负电压控制电机反转,电压值的大小决定电机输出的转矩。
电机的转速与转角由上位机控制。
二:什么是电子齿轮比(G)?当机械装置的传动比不能满足数控装置脉冲当量的要求时,用电子齿轮比,来配合数控装置与机械传动比之间的关系,满足数控装置所需要的脉冲当量。
它起到了一个输入与输出变比的作用。
电子齿轮比仅在位置控制中起作用。
电子齿轮比数值设置过大,会降低伺服电机的运行状态。
脉冲当量(M):CNC每变化一个最小数字单位时,要求相应的机械装置有一个设定的长度或角度的相应变化,称为脉冲当量,如0.001mm。
电机每转脉冲数(P):电机旋转一圈电机反馈元件反馈的脉冲数,计算方式为电机编码器的线数的4倍。
如:360×4=1440,2500×4=10000等。
丝杆螺距(L):指的是机械传动丝杆的螺纹之间的距离。
机械齿轮比(i):指的是减速机的机械齿轮比等。
电子齿轮比计算公式:G=(P ×M×i)÷L三:伺服驱动器速度环、位置环参数调整的原则是什么?伺服电机使用效果如何,除了与电机和驱动器的性能有关外,驱动器参数的调整也是一个十分关键的因素。
伺服电机常用参数设置

伺服电机常用参数设置伺服电机可以使控制速度和位置精度非常精确,并能将电压信号转换为转矩和转速来驱动控制对象。
伺服电机转子速度由输入信号控制,可以快速反应。
它用作自动控制系统中的执行器,具有机电时间常数小,线性度高,启动电压小的特点,可以接收接收到的电信号。
转换为电机轴上的角位移或角速度输出。
我今天与您分享的是伺服电机的调试方法。
1、初始化参数接线前,初始化参数。
在控制卡上:选择控制方法;清除pid参数;当控制卡打开时默认关闭能量信号;保存此状态以确保在重新充电时控制卡处于此状态。
对伺服电机:设置控制模式;设置外部控制;设置编码器信号输出的传动比;设置控制信号与电机速度之间的比例关系。
一般认为伺服工作的最大设计速度应与控制电压9V相对应。
2、接线关闭控制卡电源,并连接控制卡和伺服控制器之间的信号线。
必须连接以下线路:控制卡的模拟输出线、启用信号线和伺服输出的编码器信号线。
伺服电机和控制卡(和pc)在重新检查布线后没有错误。
此时,电机不应该移动,并且可以很容易地随外力旋转,如果不是,请检查使能信号的设置和接线。
用外力转动电机,检查控制卡是否能正确检测电机位置的变化,否则检查编码器信号的接线和设置。
3、试方向对于闭环控制系统,如果反馈信号的方向不正确,后果必然是灾难性的。
通过控制卡打开伺服启用信号。
这是伺服应该以较低的速度旋转,这就是传说中的“零漂移”。
一般的控制卡将有指令或参数来抑制零漂移。
使用此指令或参数,可以查看此指令(参数)是否可以控制电机的速度和方向。
如果无法控制,请检查模拟布线和控制模式参数设置。
给出了正数,电机处于前向旋转,编码器计数增加,给定负数,电机反向旋转,编码器计数减少。
如果电机有负载且行程有限,请勿使用此方法。
测试时不要给太多电压。
建议电压低于1V。
如果方向不一致,可以修改控制卡或电机的参数,使其一致。
4、抑制零漂在闭环控制过程中,零点漂移的存在会对控制效果产生一定的影响,最好加以抑制。
三菱伺服系统型号及功能参数概要
三菱伺服系统型号及功能参数三菱伺服系统型号大全MR-J2S系列伺服电机伺服驱动器HC-KFS13 /MR-J2S-10AHC-KFS23 /MR-J2S-20AHC-KFS43 /MR-J2S-40AHC-KFS73 /MR-J2S-70AHC-SFS52 /MR-J2S-60AHC-SFS102 /MR-J2S-100A HC-SFS152 /MR-J2S-200A HC-SFS202 /MR-J2S-200A HC-SFS352 /MR-J2S-350A HC-SFS502 /MR-J2S-500A HC-SFS702 /MR-J2S-700A MR-J3系列HF-KP13 /MR-J3-10AHF-KP23 /MR-J3-20AHF-KP43 /MR-J3-40AHF-KP73 /MR-J3-70AHF-SP52 /MR-J3-60AHF-SP102 /MR-J3-100AHF-SP152 /MR-J3-200AHF-SP202 /MR-J3-200AHF-SP352 /MR-J3-350AHF-SP502 /MR-J3-500AHF-SP702 /MR-J3-700AMR-E系列HF-KE13 /MR-E-10AHF-KE23 /MR-E-20AHF-KE43 /MR-E-40AHF-KE73 /MR-E-70AHF-SE52 /MR-E-70AHF-SE102 /MR-E-100AHF-SE152 /MR-E-200AHF-SE202 /MR-E-200A伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC三菱伺服电机的分类交流伺服系统分类:主要的系列有:MR-J、MR-H、MR-C系列;MR-J2系列;MR-J2S系列;MR-E 系列;MR-J3系列;MR-ES系列。
伺服参数调整方法
埃斯顿研发二部 2007.07.18
2021/6/21
1
一、伺服驱动器的参数调整理论基础
伺服驱动器包括三个反馈环节:位置环、速度 环以及电流环。最内环(电流环)的反应速度最快, 中间环节(速度环)的反应速度必须高于最外环 (位置环)。
如果不遵守此原则,将会造成电机运转的震动 或反应不良。伺服驱动器的设计可尽量确保电流环 具备良好的反应性能,故用户只需调整位置环与速 度环的增益即可。
数值设置太低: 速度环增益太低也会导致电机速度出现波动。比较速度
增益过高的情形可知,此时电机速度的波动频率更低。这充 分表明了速度环增益的提高使系统的工作频率得到了提高, 控制系统的快速响应性能好,能更有效地克服干扰作用的影 响。
此外,当速度环增益远小于位置环增益时,伺服的稳定 性也会被破坏,电机速度在运行过程中也会不断地波动。一 般情况下尽量保证速度环增益大于位置环增益。
图1 速度指令
2021/6/21
3
位置环增益不可超过机械系统的自然频率,否 则会产生较大的振荡。
当整个系统需要很快的反应时,仅仅确保采用 的伺服系统(控制器、伺服驱动器、电机以及编码 器)的快速反应是不够的,还必须要确保其控制的 机械系统也具有较高的刚性,这样才能使得整个系 统具有较好的刚性。
2021/6/21
通常可参照下列步骤对系统进行初步参数调整:
a)将位置环增益即先设在较低值,然后在不产生异常响声和 振动的前提下,逐渐增加速度环的增益至最大值。
b)逐渐降低速度环增益值,同时加大位置环增益。在整个响 应无超调、无振动的前提下,将位置环增益设至最大。
c)速度环积分时间常数取决于定位时间的长短,在机械系统 不振动的前提下,尽量减小此值。
伺服驱动器参数设置方法
伺服驱动器参数设置方法(总2页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。
1.位置比例增益:设定位置环调节器的比例增益。
设置值越大,增益越高,刚度越大,相同频率指令脉冲条件下,位置滞后量越小。
但数值太大可能会引起振荡或超调。
参数数值由具体的伺服系统型号和负载情况确定。
2.位置前馈增益:设定位置环的前馈增益。
设定值越大时,表示在任何频率的指令脉冲下,位置滞后量越小位置环的前馈增益大,控制系统的高速响应特性提高,但会使系统的位置不稳定,容易产生振荡。
不需要很高的响应特性时,本参数通常设为0表示范围:0~100%3.速度比例增益:设定速度调节器的比例增益。
设置值越大,增益越高,刚度越大。
参数数值根据具体的伺服驱动系统型号和负载值情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较大的值。
4.速度积分时间常数:设定速度调节器的积分时间常数。
设置值越小,积分速度越快。
参数数值根据具体的伺服驱动系统型号和负载情况确定。
一般情况下,负载惯量越大,设定值越大。
在系统不产生振荡的条件下,尽量设定较小的值。
5.速度反馈滤波因子:设定速度反馈低通滤波器特性。
数值越大,截止频率越低,电机产生的噪音越小。
如果负载惯量很大,可以适当减小设定值。
数值太大,造成响应变慢,可能会引起振荡。
数值越小,截止频率越高,速度反馈响应越快。
伺服驱动器MR J S A参数设置

NO
初始 值
参数
P80 10 10
说明
P23 0
0
P24
50 r/min
50Biblioteka P52 0 0 P53 0 0
P81 100 100 P82 100 100
P25
0 r/min
2000
P54 0 0
P83 100 100
NO 初始值 参数 P26 100% 100
参数说明
NO
初始 值
参数
P55 0 0
说明
NO
初始 值
参数
P73
300 r/min
300
说明
P16 0
0
P45 665 695
P74
500 r/min
500
P17 0 100
P46 770 770
P75
800 r/min
800
NO 初始值 参数
参数说明
NO
初始 值
参数
说明
NO
初始 值
参数
说明
P18 0 11
P47 883 883
P76 100% 100
P8
100 r/min
1000
参数说明
NO
初始 值
参数
P37
817 rad/s
773
P9
500 r/min
1500
P38
0 ms
48
P10
1000 r/min
2000
P39 980 980
说明
NO
初始 值
参数
P66 10 10
P67
1 ms
1
P68 0
0
伺服电机驱动器参数设置及编码器替代技巧

伺服电机驱动器参数设置方法及编码器替代技巧伺服电机驱动器的正确使用除按用户手册正确设置参数外,还应结合使用现场和负载情况,灵活操作。
同样,维修伺服电机系统除采用同型号的部件进行替代外,也可以对原设备的功能、信号分析后,使用不同型号部件进行替代。
现将有关资料供给读者参考。
一、伺服电机编码器替代技巧从结构上讲,伺服系统分为三部分:伺服电机、编码器、驱动器。
伺服电机的精度取决于编码器,故障也常见于这三方面。
由于技术、利益等关系,各厂家所生产的配件不可代替,而进口配件的渠道不很畅通,造成维修上很大困难。
我们可以通过对其测量,分析研究工作原理,尝试采用替换的方法进行维修。
例如,手头上有一个15芯电缆的编码器,尝试替代日本安川9芯电缆的编码器,该编码器分辨率为1024,6极,配套在安川公司生产的型号为SGMP-06AFTF22的交流伺服电机上,其原理如图1所示。
即编码器的接线除a正、a负、b正、b负、z正、z负,加上正负电源和屏蔽共9根线。
而手头上的15根线编码器与电机装配的9根线编码器无法替代使用,可作如下尝试。
图1 编码器原理方框图图3 替代原理图首先,对一台同型号且完好的伺服电机装配的9根线编码器进行测量,得到如图2所示波形。
分析得知,a、b信号的波形与15线编码器a、b信号的波形相同,而X信号为图3所示。
从中可看出,当U、V、W分别换相时,X的波形就发生一次变化。
在一个角度的过程中共有6种波形,分别定义为Ⅰ区、Ⅱ区、Ⅲ区、Ⅳ区、Ⅴ区、Ⅵ区,依测绘结果推测,此编码器送出的a、b、X信号,在伺服电机驱动器中可以将其解码后得到U、V、W信号。
据此,用一个常用1024线6极交流伺服电机编码器,只要设计合理的电路,用其u、v、w以其a、b信号合成完全相同的X信号,就可以完全代替原9芯线编码器。
为便于理解,如图3为替代原理图,其中虚线部分即为被替代的编码器。
图2 测绘出的编码器对应输出波形图其次,依据测绘及原理分析,设计电路。
伺服电机的调试方法

1、初始化参数在接线之前,先初始化参数。
在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。
在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。
一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。
比如,山洋是设置1V 电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。
2、接线将控制卡断电,连接控制卡与伺服之间的信号线。
以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。
复查接线没有错误后,电机和控制卡(以及PC)上电。
此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。
用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。
通过控制卡打开伺服的使能信号。
这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。
一般控制卡上都会有抑制零漂的指令或参数。
使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。
如果不能控制,检查模拟量接线及控制方式的参数设置。
确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。
如果电机带有负载,行程有限,不要采用这种方式。
测试不要给过大的电压,建议在1V以下。
如果方向不一致,可以修改控制卡或电机上的参数,使其一致。
4、抑制零漂在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。
使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。
由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。
5、建立闭环控制再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。
三菱MR-J2S伺服调试说明

A
105HZ
B
130HZ
C
160HZ
D
200HZ
E
240HZ
高响应
F
300HZ
自动增益调整和机床响应速度的调整方法参见下一章
6
三菱 J2S 数字交流伺服调试说明书
注 2:参数符号前带“*”的参数,改变数值后,需关电源,再 开电源才能有效。
(详细请参见三菱 J2S 伺服驱动说明书)
5.三菱 J2S 伺服驱动器的参数表:
三菱 J2S 伺服驱动器和凯恩帝数控系统相配时,只需设定以下 参数(见参数表);其余参数,一般情况下,不用修改。
参数表
TE1
L1 L2 L3 U V W
TE2
L11
L21
P
C
PE
D
伺服电机
编码器
MR-J2S-200A(1.5KW )以上 伺服驱动器
至数控系统
CN1A CN1B
至电气控制电路
CN2
编码器反馈电缆
三相200V  ̄ 220V 单相200V  ̄ 220V
L11 L21 编码器
3.通电时的检查 1) 确认三相主电路输入电压在 200V-220V 范围内,单相主电路输入
电压在 200V-220V 范围内。 建议用户选用 380V/200V 的三相伺服变压器。
2)确认接地可靠。
4.三菱 J2S 伺服驱动器的参数设定方法
三菱 J2S 伺服驱动器修改参数的操作方法,如下: 1) 按“MODE”按钮,可切换显示以下 6 种方式, 按“M O D E ” 键 状态显示 诊断显示 报警 基本参数 扩展参数 1 扩展参数 2
益 1)的数值(此值作为 N0.6 参数和 N0.36 参数最大范围的数
伺服驱动器重要参数的设置方法和技巧
伺服驱动器重要参数的设置方法和技巧伺服驱动器重要参数的设置方法和技巧随着市场的发展和国内功率电子技术、微电子技术、计算机技术及控制原理等技术的进步,国内数控系统、交流伺服驱动器及伺服电动机这两年有了较大的发展,在某些应用领域打破了国外的垄断局面。
笔者因多年从事数控技术工作,使用了多套日本安川、松下、三洋等数字伺服,但最近因国产伺服性价比好,使用了一些数控技术公司生产的交流伺服驱动及电动机,对使用中某些方面总结了一些简单实用的技巧。
1KNDSD100基本性能1.1基本功能SD100采用国际上先进的数字信号处理器(DSP)TM320(S240)、大规模可编程门阵列(FPGA)、日本三菱的新一代智能化功率模块(1PM),集成度高,体积小,具有超速、过流、过载、主电源过压欠压、编码器异常和位置超差等保护功能。
与步进电动机相比,交流伺服电动机无失步现象。
伺服电动机自带编码器,位置信号反馈至伺服驱动器,与开环位置控制器一起构成半闭环控制系统。
调速比宽1:5000,转矩恒定,1 r和2000r的扭矩基本一样,从低速到高速都具有稳定的转矩特性和很快的响应特性。
采用全数字控制,控制简单灵活。
用户通过参数修改可以对伺服的工作方式、运行特性作出适当的设置。
目前价格仅比步进电动机高2000~3000元。
1.2参数调整SD100为用户提供了丰富的用户参数0~59个,报警参数1~32个,监视方式(电动机转速,位置偏差等)22个。
用户可以根据不同的现场情况调整参数,以达到最佳控制效果。
几种常用的参数的含义是:(1)“0”号为密码参数,出厂值315,用户改变型号必须将此密码改为385。
"(2)“1”号为型号代码,对应同系列不同功率级别的驱动器和电动机。
(3)“4”号为控制方式选择,改变此参数可设置驱动器的控制方式。
其中,“0”为位置控制方式;“1”为速度控制方式;“2”为试运行控制方式;“3”为JOG控制方式;“4”为编码器调零方式;“5”为开环控制方式(用户测试电压及编码器);“6”为转矩控制方式。
伺服案例1 相对位置控制模式

32位寄存器 D8140与D8142用于对Y0或Y1输出脉冲的计数。当正转时为加 计数器,反转是数值减小。
(在绝对位置控制中当前值计数器非常重要,伺服走动的距离是以计数器数 值为参照的。在以后的案例中会有详细讲解。)
在下图中,如果人的位置是在2米处,那么D8040(当Y0输出时)的数据就是2。
X0停止 X1原点回归 X2点动+ X3点动X4自动自动 X5自动反转 X6原点 X7正转极限 X10反转极限 X11伺服故障输出 X12急停
Y0脉冲输出 Y1方向信号 Y2滞留脉冲清除 Y3伺服复位
二(6_1)PLC程序,SFC形式
1、频率与速度的转换程序
电机转速=PLC脉冲频率*(电子齿轮比/131072*60) PLC脉冲频率=脉冲频率/(电子齿轮比/131072*60)
2、PLC紧急情况设定
3、PLC相关参数设定
4、SFC步进块入口
5、SFC各个块
6、原点回归块
7、点动正转块
8、点动反转块
9、自动正转块
10、点动反转块
二(6_2)PLC程序,梯形图形式
二(6_3)加往返定位功能
正向定位结束1S后, 再往返回起点
补充案例
例 电机最高转速3000转/分钟:每 转PLC要向其发送800个脉冲,电 机每转丝杆位移5mm。加减速时 间1S。匀速为100mm/S,停止速 度10mm/S。
什么是命令脉冲?什么是电子齿轮比?什么是偏差计数器? 什么是数/模转换器?什么是反馈脉冲?
什么是命令脉冲? 命令脉冲由上位机(本例即PLC)发出的脉冲串。
相对位置指令DDRVI可以由Y0或Y1口输出指定数量指定频率的脉冲串。 按上图接线,放大器由CN1A_3和CN1A_10脚完成脉冲接收。
三菱MR-J2S数字伺服调试说明书
MITSUBISHI三菱J2S数字交流伺服安装调试说明书(2003.11版本目录1.三菱J2S连接示意图2.通电前的检查3.通电时的检查4.三菱J2S伺服驱动器的参数设定方法5.三菱J2S伺服驱动器的参数表6.三菱J2S伺服驱动器的参数和性能优化调整1.三菱J2S连接示意图重要提示:由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种情况,不在三菱的保修范围!2.通电前的检查1确认三菱J2S伺服驱动器和电机插头的连接,相序是否正确:A.中惯量电机HC-SFS52(0.5KW~152(1.5KW的连接:伺服驱动器电机插头U AVBWC接地D刹车电源B1G刹车电源B2HB.中惯量电机HC-SFS202(2.0KW以上的连接:伺服驱动器电机插头U AVBWC接地D制动器插头刹车电源B1A刹车电源B2B注:电机相序错误,通电时会发生电机抖动现象。
刹车电源B1、B2无极性。
2确认三菱J2S伺服驱动器CN2和伺服电机编码器联接正确,接插件螺丝拧紧。
3确认三菱J2S伺服驱动器CN1A和数控系统的插头联接正确,接插件螺丝拧紧。
4确认三菱J2S伺服驱动器CN1B接插件螺丝拧紧,和外部控制连接正确。
3.通电时的检查1确认三相主电路输入电压在200V-220V 范围内,单相主电路输入电压在200V-220V 范围内。
建议用户选用380V/200V 的三相伺服变压器。
2确认接地可靠。
4.三菱J2S 伺服驱动器的参数设定方法三菱J2S 伺服驱动器修改参数的操作方法,如下:1按“MODE”按钮,可切换显示以下6种方式,2切换到显示基本参数画面:2按○・UP和○・DOWN键,选择想修改参数的参数号(例修改2号参3按2次○・SET键(想修改参数的参数值显示并闪烁。
4按○・UP键和○・DOWN键,改变参数值。
(只有闪烁部分的参数值,才可以改变5按○・SET键,确认修改的参数值。
重复以上2~5步骤,输入所有想改变的参数(按5.三菱J2S伺服驱动器的参数表。
伺服电机驱动器参数设置及编码器替代技巧

伺服电机驱动器参数设置方法及编码器替代技巧伺服电机驱动器的正确使用除按用户手册正确设置参数外,还应结合使用现场和负载情况,灵活操作。
同样,维修伺服电机系统除采用同型号的部件进行替代外,也可以对原设备的功能、信号分析后,使用不同型号部件进行替代。
现将有关资料供给读者参考。
一、伺服电机编码器替代技巧从结构上讲,伺服系统分为三部分:伺服电机、编码器、驱动器。
伺服电机的精度取决于编码器,故障也常见于这三方面。
由于技术、利益等关系,各厂家所生产的配件不可代替,而进口配件的渠道不很畅通,造成维修上很大困难。
我们可以通过对其测量,分析研究工作原理,尝试采用替换的方法进行维修。
例如,手头上有一个15芯电缆的编码器,尝试替代日本安川9芯电缆的编码器,该编码器分辨率为1024,6极,配套在安川公司生产的型号为SGMP-06AFTF22的交流伺服电机上,其原理如图1所示。
即编码器的接线除a正、a负、b正、b负、z正、z负,加上正负电源和屏蔽共9根线。
而手头上的15根线编码器与电机装配的9根线编码器无法替代使用,可作如下尝试。
图1 编码器原理方框图图3 替代原理图首先,对一台同型号且完好的伺服电机装配的9根线编码器进行测量,得到如图2所示波形。
分析得知,a、b信号的波形与15线编码器a、b信号的波形相同,而X信号为图3所示。
从中可看出,当U、V、W分别换相时,X的波形就发生一次变化。
在一个角度的过程中共有6种波形,分别定义为Ⅰ区、Ⅱ区、Ⅲ区、Ⅳ区、Ⅴ区、Ⅵ区,依测绘结果推测,此编码器送出的a、b、X信号,在伺服电机驱动器中可以将其解码后得到U、V、W信号。
据此,用一个常用1024线6极交流伺服电机编码器,只要设计合理的电路,用其u、v、w以其a、b信号合成完全相同的X信号,就可以完全代替原9芯线编码器。
为便于理解,如图3为替代原理图,其中虚线部分即为被替代的编码器。
图2 测绘出的编码器对应输出波形图其次,依据测绘及原理分析,设计电路。
技术说明资料伺服调整参数的说明

技术说明资料伺服调整参数的说明(总4页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--技术说明资料伺服调整参数的说明JRAT: 负荷惯性比 ,请设定为以下的算出值 JRAT1= 马达轴换算的负荷惯量( JL) ×100% 伺服马达的惯量(JM)KVP: 速度环比例增益此值设定得越高则应答性越好. 将它设定在装置的机械系统不振动,不共振的程度. 若 JRAT已正确设定,KVP设定的值就成为速度环的应答带TVI: 速度环积分时间常数因为此积分时间常数是对伺服系统延迟的要素,积分时间常数设定大时,应答性变差,定位时间延长.相反,此积分时间常数过小时,伺服系统变得不稳定,装置的机械系统振动或共振. 请将积分时间常数设定到装置的机械系统不振动或共振的程度. 伺服系统稳定的TVI目标值应确保在速度环应答带的1/4以下 TVI【ms】=1/ (KVP【Hz】/ 4 ×2π)为可以设定的最小目标值KP: 位置环比例增益位置环增益增加时,应答性提高,稳定时间减短. 但是,在装置的机械系统的刚性较低时,机械将发生振动及共振. 想把位置环增益设定高时,应充分考虑装置的机械系统的刚性,提高系统的固有振动数, 伺服系统稳定的KP(Hz)目标值应确保在速度环应答带的1/4以下 KP【1/s】=KVP/ 4×2π为可以设定的最大目标值TCFIL: 转矩指令滤波器通过对速度环内转矩指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此转矩指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化VCFIL: 速度指令滤波器通过对速度环内速度指令的1次低通滤波器的剪切频率的设定,可以有抑制振动的效果. 在速度控制式或位置控制式全闭环控制时设定有效果. 因为此速度指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化PCFIL: 位置指令滤波器通过对位置环内位置指令的1次低通滤波器的剪切频率的设定,可以有抑制共振,振动,异音的效果. 因为此位置指令滤波器是对伺服系统延迟的要素,设定过大时应答性将恶化FFGN: 前馈增益减小位置偏差,位置环的应答加快. 希望将稳定时间提早时有效,但在位置环比例增益已设定较大时的装置上无效. 在观测定位结束信号.速度监测的同时进行设定,使定位结束信号不被分割,速度监测信号不发生超时.FFFIL: 前馈滤波器可设定前馈时的1次低通滤波器的剪切频率. 发生了定位结束信号被分割及速度监测时产生超时的情况下,通过此设定可以进行抑制TCNFILA/B: 转矩指令陷波滤波器对装置的机械系统的共振频率设置转矩指令陷波滤波器后,可以抑制装置机械系统的共振,异音. 通过对TCNFILA TCNFILBA 的并用,可以形成2段陷波滤波器. 利用自动调整陷波滤波器功能,TCNFILA 可以被自动设定大部分交流伺服系统位置环均采用比例调节器,因为积分调节虽然可以减小系统的静差,但是会产生位置超调,在需要高跟随性能的系统中,可以增加位置前馈增益参数。
三菱伺服系统型号及功能参数

三菱伺服系统型号及功能参数三菱伺服系统型号大全MR-J2S系列伺服电机伺服驱动器HC-KFS13 /MR-J2S-10AHC-KFS23 /MR-J2S-20AHC-KFS43 /MR-J2S-40AHC-KFS73 /MR-J2S-70AHC-SFS52 /MR-J2S-60AHC-SFS102 /MR-J2S-100AHC-SFS152 /MR-J2S-200AHC-SFS202 /MR-J2S-200AHC-SFS352 /MR-J2S-350AHC-SFS502 /MR-J2S-500AHC-SFS702 /MR-J2S-700AMR-J3系列HF-KP13 /MR-J3-10AHF-KP23 /MR-J3-20AHF-KP43 /MR-J3-40AHF-KP73 /MR-J3-70AHF-SP52 /MR-J3-60AHF-SP102 /MR-J3-100AHF-SP152 /MR-J3-200AHF-SP202 /MR-J3-200AHF-SP352 /MR-J3-350AHF-SP502 /MR-J3-500AHF-SP702 /MR-J3-700AMR-E系列HF-KE13 /MR-E-10AHF-KE23 /MR-E-20AHF-KE43 /MR-E-40AHF-KE73 /MR-E-70AHF-SE52 /MR-E-70AHF-SE102 /MR-E-100AHF-SE152 /MR-E-200AHF-SE202 /MR-E-200A伺服器:三菱伺服:MJ-J2 MR-S2 MR-S3 MR-H MR-JXXA MDS-B-SP MDS-C1-CV MDS-B-CV MDS-B-V1 MDS-B-V2 MDS-C1-V24 MR-B-SVJ2 MR-A-CV MDS-A-CR MDS-B-CVE MR-SB FR-SF-2 MR-SA MDS-B-V14L FR-SGJ-2 FR-CV FCVA-MP10 FANUC三菱伺服电机的分类交流伺服系统分类:主要的系列有:MR-J、MR-H、MR-C系列;MR-J2系列;MR-J2S系列;MR-E系列;MR-J3系列;MR-ES系列。
伺服系统参数设置

伺服系统参数设置
一、伺服系统稳态参数设置
1. 进入GSV22P系统设定环境双击图标
2.根据计算结果依次输入
(1)放大器型号:MR-J2S
规格:200B
(2)电动机型号:HS-SFS
规格:202
(3)细节设定,包括:
定位方式:相对(INC)
轴号设定:1
设定完毕后单击OK 按钮确认
并显示如下画面:
3. 仿照上述(1)~(3)步骤完成2号~5号轴的设定(如下图所示)
4. 固定参数设定
(1)双击伺服数据设定图标
(2)弹出伺服数据设定对话框
双击固定参数1#轴区域
(3)弹出固定参数设定对话框
设定以下参数:
●单位:脉冲(PULSE)
●负载轴每转的脉冲数:655360
●负载轴每转的行程:131072
●行程上、下限:0
(4)重复(2)~(3)步骤完成2号~5号轴的设定(如下图所示)
设定完毕后单击伺服参数按钮
进入伺服系统动态参数设置
二、伺服系统动态参数设置
1. 双击伺服参数1#轴区域
2. 弹出伺服参数1#轴对话框(1)基本参数
●反馈脉冲:131072(PLS)
●旋转方向:正向(CCW)
●增益调整:自动运行方式1
●响应等级:
(2)调整参数1
在此对话框下主要设定
以下参数:
●负载惯量比;
●位置增益1/2;
●速度增益1/2;
●积分常数等
(此处均采用缺省值)
(3)重复(1)~(2)步骤完成2号~5号轴的设定(如下图所示)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P8
100 r/min
1000
参数说明
NO
初始 值
参数
P37
817 rad/s
773
P9
500 r/min
1500
P38
0 ms
48
P10
1000 r/min
2000
P39 980 980
说明
NO
初始 值
参数
P66 10 10
P67
1 ms
1
P68 0
0
说明
P11
0 ms
1000
P40 0 0
P69 1
说明
NO
初始 值
参数
P73
300 r/min
300
说明
P16 0
0
P45 665 695
P74
500 r/min
500
P17 0 100
P46 770 770
P75
800 r/min
800
NO 初始值 参数
参数说明
NO
初始 值
参数
说明
NO
初始 值
参数
说明
P18 0 11
P47 883 883
P76 100% 100
说明
NO
初始 值
参数
P84 0
0
说明
P27
4000 脉冲
2048
P56
0 s
0
P28 100% 100
P57 10 10
P4 1 75
P5
100
脉冲
100
P6 35 36
P7 3ms 3
P32
0 mv
0
P33
100 ms
100
P34
70 x0.1倍
64
P35
30 rad/s
36
P36
177 rad/s
181
P61
70 x0.1倍
70
P62 100% 100
P63 100% 100
P64 100% 100
P65 0
0
NO 初始值 参数
NO
初始 值
参数
P80 10 10
说明
P23 0
0
P24
50 r/min
50
P52 0 0 P53 0 0
P81 100 100 P82 100 100
P25
0 r/min
2000
P54 0 0
P83 100 100
NO 初始值 参数 P26 100% 100
参数说明
NO
初始 值
参数
P55 0 0
NO 初始值 参数
参数说明
NO
初始 值
参数
P0 0
0
因伺 服放 P29 大器 -2 而异 mv
说明
NO
初始 值
参数
P58 0
0
说明
P1 2 12
P30
0 mv
0
P59 0
0
NO 初始值 参数
参数说明
NO
初始 值
参数
说明
NO
初始 值
参数
说明
P2 105 105
P31
0 mv
0
P60 0
0
P3 1 4096
P19 0
0
P48 994 994
P77 100 100
NO 初始值 参数
参数说明
NO
初始 值
参数
说明
NO
初始 值
参数
说明
P20 0
0
P49 0 0
P78 10000 10000
P21 0 11
P50 0 0
P79 10 10
NO 初始值 参数
参数说明
NO
初始 值
参数
P22 0
0
P51 0 0
说明
1
P12
0 ms
500
P41 0 0
P70 1
1
NO 初始值 参数
参数说明
NO初始 值ຫໍສະໝຸດ 参数说明NO
初始 值
参数
说明
P13
0 ms
0
P42 3 3
P71 1
1
P14
0 ms
0
P43 111 111
P72
200 r/min
200
NO 初始值 参数
P15 0
0
参数说明
NO
初始 值
参数
P44 222 222