实验二最少拍控制系统设计2015
计算机控制系统 第2章(第3次课 最少拍)
各个采样时刻的输出序列为:
y(0) 0, y(T ) 0, y(2T ) T 2 , y(3T ) 3.5T 2 , y(4T ) 7T 2 ,
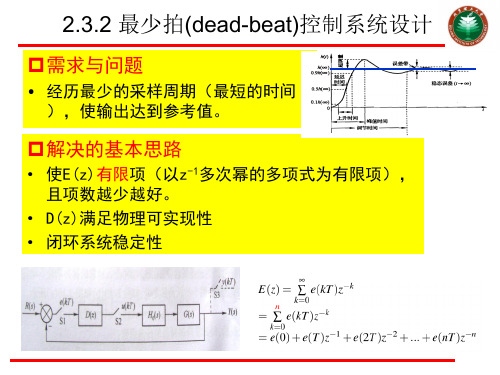
2.3.2 最少拍(dead-beat)控制系统设计
需求与问题
• 经历最少的采样周期(最短的时间 ),使输出达到参考值。
解决的基本思路
• 使E(z)有限项(以z-1多次幂的多项式为有限项), 且项数越少越好。 • D(z)满足物理可实现性 • 闭环系统稳定性
2.3.2 最少拍控制系统设计
最少拍(有限拍)控制是一种时间最优控制方式。 设计目标:设计一个数字控制器D(z),使系统在 典型输入信号r(t)作用下,经过最少的采样周期, 消除输出和输入之间的偏差,达到平衡。通常 把一个采样周期称为一拍。 设计准则:1)单位阶跃输入
1 z
各采样时刻输出序列为:
2 z 1 z 2 z 3 z 4
y(0) 0, y(T ) 2, y(2T ) 1, y(3T ) 1,
系统的输出响应曲线如图2-16(a)所示。
(2)单位加速度输入
Y ( z) Gc ( z) R( z )
而输入序列 y(0) 0, y(T ) 0.5T 2 , y(2T ) 2T 2 , y(3T ) 4.5T 2 , y(4T ) 8T 2 , 系统的输入和输出响应曲线如图2-16(b)所示。
最少拍控制器中的最少拍是针对某一典型输入设计的, 对于其它典型输入则不一定为最少拍,甚至引起大的超调 和静差。
最少拍控制系统课程设计

最少拍控制系统课程设计一、教学目标本课程的教学目标是使学生掌握最少拍控制系统的原理、设计和应用,培养学生分析和解决自动控制问题的能力。
具体目标如下:1.知识目标:–掌握最少拍控制系统的概念、原理和特点。
–了解最少拍控制系统的设计方法和步骤。
–熟悉最少拍控制系统的应用领域和实际工程中的应用。
2.技能目标:–能够运用最少拍控制理论分析和解决自动控制问题。
–具备使用最少拍控制系统设计和优化控制器的能力。
–能够进行最少拍控制系统的仿真和实验操作。
3.情感态度价值观目标:–培养学生的创新意识和团队合作精神,提高学生解决实际问题的能力。
–增强学生对自动控制领域的兴趣和好奇心,激发学生进一步学习的动力。
–培养学生的工程责任感和职业道德,使学生在设计和应用最少拍控制系统时能够考虑到安全、环保和社会影响。
二、教学内容本课程的教学内容主要包括最少拍控制系统的原理、设计和应用。
具体内容如下:1.最少拍控制系统原理:–介绍最少拍控制系统的概念和基本原理。
–分析最少拍控制系统的优势和特点,与其他控制系统的比较。
–讲解最少拍控制系统的数学模型和控制器设计方法。
2.最少拍控制系统设计:–介绍最少拍控制系统的设计步骤和流程。
–讲解最少拍控制系统的控制器参数选择和调整方法。
–分析最少拍控制系统在实际工程中的应用和案例。
3.最少拍控制系统应用:–介绍最少拍控制系统在各个领域的应用,如工业自动化、机器人、交通运输等。
–分析最少拍控制系统在实际工程中的优势和局限性。
–探讨最少拍控制系统的发展趋势和未来挑战。
三、教学方法为了提高学生的学习兴趣和主动性,本课程将采用多种教学方法相结合的方式。
具体方法如下:1.讲授法:教师通过讲解最少拍控制系统的原理、设计和应用,引导学生理解和掌握相关知识。
2.讨论法:学生进行小组讨论,鼓励学生提出问题、分享观点,培养学生的思考和沟通能力。
3.案例分析法:通过分析实际工程中的最少拍控制系统案例,使学生能够将理论知识应用于实际问题。
最小拍控制系统及直流电机闭环调速控制系统设计和实现实验报告
最小拍控制系统及直流电机闭环调速控制系统设计和实现实验报告班级:xx姓名:xx学号:xx时间:第16周周日9-12节指导老师:xx老师最小拍控制系统一.实验目的1.掌握最小拍有纹波控制系统的设计方法。
2.掌握最小拍无纹波控制系统的设计方法。
二.实验设备PC机一台,TD-ACC+实验系统一套,i386EX 系统板一块三.实验原理典型的最小拍控制系统如图4.1-1所示,其中 D(Z)为数字调节器,G(Z) 为包括零阶保持器在内的广义对象的Z 传递函数,Φ (Z)为闭环Z 传递函数,C(Z) 为输出信号的Z 传递函数,R(Z) 为输入信号的Z 传递函数。
1.最小拍有纹波系统设计。
图4.1-2是一个典型的最小拍控制系统。
针对阶跃输入,其有纹波系统控制算法可设计为:2.最小拍无纹波系统设计。
有纹波系统虽然在采样点上的误差为零,但不能保证采样点之间的误差值也为零,因此存在纹波现象。
无纹波系统设计只要使U(Z) 是Z-1的有限多项式,则可以保证系统输出无纹波。
即:式中 Pi 、Z i――分别是G(Z) 的极点和零点。
为了使U(Z) 为有限多项式,只要Φ (Z)的零点包含G(Z) 的全部零点即可,这也是最小拍无纹波设计和有纹波设计的唯一不同点。
如图4.1-2所示,针对单位斜波输入,无纹波系统控制算法可设计为:3.实验接线图。
图4.1-2所示的方框图,其硬件电路原理及接线图可设计如下,图中画“○”的线需用户在实验中自行接好,对象需用户在运放单元搭接。
上图中,控制计算机的“OUT1”表示386EX 内部 1 #定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX 内部主片8259的7 号中断,用作采样中断,“DIN0”表示386EX 的I/O 管脚P1.0 ,在这里作为输入管脚用来检测信号是否同步。
4.数字控制的实现。
图4.1-4是数字控制器实现的参考程序流程图。
四.实验步骤1. 参考流程图4.1-4编写程序,检查无误后编译、链接。
最少拍控制系统设计
题目:最少拍控制系统设计课程:计算机控制技术专业:控制工程姓名:韩庆芝学号:142085210202摘要《计算机控制技术》是一门理论性、实用性和实践性都很强的课程,计算机控制技术的设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。
通过设计,加深对控制算法设计的认识,学会控制算法的实际应用,从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的调试工作打下基础。
在数字随动系统中,通常要求系统输出能够快速地、准确地跟踪给定值变化,最小拍控制就是适应这种要求的一种控制策略。
在数字控制系统中,通常把一个采样周期称为一拍。
所谓最小拍控制,是指系统在某种典型输入信号(如阶跃信号、速度信号、加速度信号等)作用下,经过最少的采样周期使得系统输出的稳态误差为零。
最小拍控制系统也称为最小拍无差系统或最小拍随动系统。
显然这种系统对闭环脉冲传递函数的性能要求是快速性和准确性。
最小拍控制是一类时间最优控制,系统的性能指标就是要求调节时间最短。
目录1 课题简介.................................................................................................................................. 错误!未定义书签。
1.1 设计内容 (1)1.2 设计要求 (1)2 最少拍控制方案设计 (2)2.1 最少拍控制器的介绍 (2)2.2 控制系统框图及闭环工作原理 (2)3最少拍控制系统硬件电路设计 (3)3.1 总体硬件电路图 (3)3.2 输入双极性的实现原理 (4)3.3 输出双极性的实现原理 (5)3.4 给定的被控对象的实现 (5)4 最少拍无纹波系统控制算法设计 (7)4.1 最少拍无纹波控制的基本原理 (7)4.2 最小拍无纹波控制的算法实现 (8)5最小拍无纹波控制软件编程设计 (9)5.1 主程序及中断程序的思考图及具体流程图 (9)5.2 重要程序的作用与实现 (9)6 实验与结果分析 (11)6.1 仿真结果 (11)6.2 上机调试结果 (11)7 小结与体会.............................................................................................................................. 错误!未定义书签。
最少拍数字控制器的设计 (2)
摘要本次设计针对一阶惯性积分系统在单位速度信号输入作用下进行最少拍数字控制器的设计,验证了最少拍控制器的优点,并对最少拍算法进行理论分析,分别设计出最少拍有纹波和无纹波数字控制器,利用 MATLAB 仿真平台对设计的最少拍数字控制器进行系统仿真研究,并对有纹波和无纹波系统进行对比研究。
关键词最少拍控制;无纹波控制器;有纹波控制器;Matlab仿真目录摘要 (1)第一章最少拍有纹波控制器设计 (3)1.1设计原理 (3)1.2设计举例 (5)第二章最少拍无纹波控制器设计 (5)2.1 设计原理 (5)2.2 设计举例 (6)第三章基于Matlab的最少拍控制的实现 (7)3.1 输入单位阶跃信号 (7)3.2 输入单位速度信号 (8)3.3 输入单位加速度信号 (9)参考文献 (10)致谢 (11)离散控制系统最少拍控制最少拍系统控制设计是指系统在典型输入信号(如单位阶跃输入信号、单位速度输入信号、单位加速度输入信号等)作用下,经过最少拍(有限拍),使系统输出的稳态误差为零。
最少拍控制系统也称为最少拍无差系统、最少拍随动系统,实际上是时间最优控制系统,系统的性能指标就是系统的调节时间最短或者尽可能的短。
可以看出,这种系统对闭环脉冲传递函数的要求是快递性和准确性。
最少拍控制系统的设计与被控对象的零极点位置有很密切的关系。
第一章 最少拍有纹波控制器设计1.1设计原理由系统闭环脉冲传递函数可以看出,在Φ(z )中,D(z)和G (z )总是成对出现的。
只有当广义对象稳定[即G (z )在z 平面单位圆上和单位圆外没有极点]且不包含纯滞后环节时,上述方法才是可行的,否则,不允许D (z )与G (z )发生零极点对消。
这是因为,简单地利用D (z )的零点去对消G (z )不稳定极点,虽从理论上来说可以得到一个稳定的闭环系统,但这种稳定是建立在零极点完全对消的基础上的。
当系统参数产生飘逸,或者对象辨识有误差时,这种零极点对消就不可能准确实现,从而引起闭环系统不稳定。
最小拍控制系统

实验六 最小拍控制系统一、实验目的1.掌握最少拍有纹波系统和最少拍无纹波系统的计算机控制脉冲传函数D (Z )的设计方法。
2.了解最少拍设计的饱和非线性条件及改进设计。
二、实验仪器与设备1.TDN —ACS 实验教学系统一台 2.PC 微机一台 3.电阻电容若干三、实验原理(一)最小拍有纹波系统1.原理见图6—1。
R 为输入,C 为输出,计算机对误差E 定时采样按D (Z )计算输出控 制量U 。
图中K=5。
图6—1针对阶跃输入进行计算机控制算法D (Z )设计。
2.D(Z)算法采样周期T=1S ,(Z )为计算机输入,U (Z )为输出,有:32133221101)()()(−−−++++++==Z P ZP Z P Z K Z K Z K K Z E Z U Z D式中K i 与P i 取值范围:–0.9999~+0.9999,计算机分别用相邻三个字节存储其BCD 码。
最低字节存符号,00H 为正,01H 为负。
中间字节存前2位小数,最高字节存末2位小数。
例有系数0.1234,则内存为:地址 内容2F00H 00H 2F01H 12H 2F02H 34H程序运行时转换为二进制模2定点小数。
注意,D (Z )中缺项相当于系数为零, 应在相应内存三字节全存入00H 。
系数存储安排如表6—1表6—12F00H 2F0CH 2F01H 2F0DH 2F02H 2F0EH K 0P 12F03H 2F0FH 2F04H 2F10H 2F05H 2F11H K 1P 22F06H 2F12H 2F07H 2F13H 2F08H 2F14HK 2P 3 2F09H2F0AH 2F0BHK 3将D (Z )式写成差分方程,则有:3322113322110−−−−−−−−−+++=K K K K K E K K U P U P U P E K E K E K E K U式中E K ~ E K-3,误差输入;U K ~ U K-3 ,计算机输出。
最少拍数字控制器的设计
课 程 设 计 用 纸
快为 0,应使表达式中拍数 N 最小。所以当 p=0,即 F(z)=1 时,系统在采样 点的输出可在最少拍(Nmin=q 拍)内达到稳态,即为最少拍控制。 最少拍控制器设计时,闭环 Z 传递函数及误差传递函数为: Φ (z)= 1 (1 z 1 ) q φ e(z)= (1 z 1 ) q 最少派控制器: U ( z) 1 Φ ( z) 1 (1 z 1 ) q D(z)= = E ( z ) G ( z ) 1 φ ( z ) G( z )(1 z 1 ) q q=1、2、3,取决于输入信号的类型 2、最少拍控制器的可实现问题。 前面根据最小拍定义确定的闭环误差脉冲传递函数 e ( z) (1 z 1 )q ( z) 1 (1 z 1 )q 只适用于对象不含有纯滞后环节的系统。实际中,很多对象都含有纯滞后,为 了使设计的控制器在物理上可实现,需对设计加以限制。使闭环脉冲传递函数的 1 q 零点包含纯滞后环节 Φ (z)=zd 1 (1 z )
四、最少拍数字控制器设计的总结 五、参考文献
--
-3-
课 程 设 计 用 纸
教师批阅
一、设计的目的及意义
通过对最少拍数字控制器的设计与仿真,让自己对最少拍数字控制器有更好 的理解与认识,透切理解最少拍、最少拍有纹波数字控制器、最少拍无纹波数字 控制器的概念,分清最少拍有纹波与无纹波控制系统的优缺点,熟练掌握最少拍 数字控制器的设计方法、步骤,并能灵巧地应用 MATLAB 平台对最少派控制器 进行系统仿真。通过设计,加深对计算机控制技术的认识,进一步巩固《计算机 控制技术》这一门课程的基础理论知识,提高对计算机控制系统设计的能力
--
-2-
课 程 设 计 用 纸
最少拍控制系统课程设计

最少拍控制系统课程设计一、课程目标知识目标:1. 学生能够理解最少拍控制系统的基本概念,掌握其工作原理;2. 学生能够运用数学方法分析最少拍控制系统的性能,并描述其特点;3. 学生能够掌握最少拍控制系统的设计方法和步骤。
技能目标:1. 学生能够运用所学知识,设计并实现最少拍控制系统;2. 学生能够运用仿真软件对最少拍控制系统进行仿真实验,分析并解决实际工程问题;3. 学生能够运用团队合作的方式,进行最少拍控制系统的设计与调试。
情感态度价值观目标:1. 学生通过学习最少拍控制系统,培养对自动化技术的兴趣和热情;2. 学生在团队合作中,培养沟通协作能力和集体荣誉感;3. 学生能够认识到最少拍控制系统在现代工业中的重要作用,树立正确的价值观。
课程性质:本课程为自动化及相关专业高年级的专业课程,旨在帮助学生掌握最少拍控制系统的设计与实现方法。
学生特点:学生已具备一定的自动控制理论基础,具有较强的数学基础和逻辑思维能力。
教学要求:注重理论与实践相结合,强化动手能力培养,提高学生解决实际工程问题的能力。
在教学过程中,将目标分解为具体的学习成果,便于教学设计和评估。
二、教学内容1. 最少拍控制系统的基本概念与原理- 控制系统稳定性分析- 最少拍控制的基本原理- 最少拍控制系统的数学描述2. 最少拍控制系统的设计方法- 状态空间设计方法- 基于观测器的最少拍控制设计- 最少拍控制器的参数优化3. 最少拍控制系统的仿真与实验- 仿真软件的应用- 控制系统建模与仿真- 实际控制系统设计与调试4. 最少拍控制系统在实际工程中的应用- 工业控制中的应用案例- 控制系统性能分析- 最少拍控制系统优化与改进教学内容安排与进度:第一周:介绍控制系统稳定性分析,理解最少拍控制的基本原理;第二周:学习最少拍控制系统的数学描述,掌握状态空间设计方法;第三周:学习基于观测器的最少拍控制设计,进行控制器参数优化;第四周:运用仿真软件进行控制系统建模与仿真;第五周:进行实际控制系统设计与调试,分析工程应用案例;第六周:总结最少拍控制系统在实际工程中的应用,进行性能分析与优化。
最小拍设计

在图示计算机控制系统中, 在图示计算机控制系统中, G(s)是被控对象的传递函数; 是被控对象的传递函数; 是被控对象的传递函数 H(s)是零阶保持器,将离散信号转换为连续信号; 是零阶保持器,将离散信号转换为连续信号; 是零阶保持器 D(z)是数字控制器. 是数字控制器. 是数字控制器
设计问题:根据已知的性能指标和G(s)来设计数字控制器 设计问题:根据已知的性能指标和 来设计数字控制器D(z). . 来设计数字控制器
前向差分变换法易使系统不稳定,不宜采用; 前向差分变换法易使系统不稳定,不宜采用; 后向差分变换法会使D(z)的频率特性发生畸变; 的频率特性发生畸变; 后向差分变换法会使 的频率特性发生畸变 双线性变换法最好; 双线性变换法最好; 所有离散化方法采样周期的选择必须满足 ω s ≥ 10ω c
2010/6/7 计算机控制技术
1 , s(s + 2)
设计 D(s)
ess = 0.1
6
解:
1 0.5 G0 (s) = = s(s + 2) s(0.5s +1)
分析原对象:该对象为典型的I型系统, 分析原对象:该对象为典型的I型系统,开环放大系数 0.5.该系统的稳态误差为: 为0.5.该系统的稳态误差为:
2010/6/7
计算机控制技术
4
第一步:设计期望的连续控制器D(s) 第一步:设计期望的连续控制器
r(t) + e(t) T e(k) D(z) u(k) T H(s) u(t) G(s) y(t)
r(t) + -
e(t)
D(s)
u(t)
G(s)
y(t)
根据用户对输出响应的性能指标要求,利用连 根据用户对输出响应的性能指标要求, 续系统的频率特性法, 续系统的频率特性法,根轨迹等方法设计上图 中期望的连续控制器 连续控制器D(s). 中期望的连续控制器 .
最少拍计算机控制系统

已知该系统广义对象的脉冲传递函数为))(()(1111-z 368.01z 1z 718.01z 368.0-----+,采样周期=0.1s 1. 设计单位阶跃信输入时的最少拍无纹波数字控制器D (z )2. …单位速度输入…,分析其控制效果解:∵G (z )有1z -因子,零点z=-0.717,级点1z =1,2z =0.368闭环脉冲函数)(z φ应包含1z -因子和)(z G 的全部非零零点∴)(z φ=a 1z -(1+0.7171z -)We(z)应由输入类型,G (z )的不稳定极点和)(z φ的阶次来决定∴We (z )=(1-1z -)(1+1f 1z -)又∵We (z )=1-)(z φ,代入,得(1-1z -)(1+1f 1z -)=1-1a -z (1+0.7171z -) =>⎰==-a717.0f -a f 11=>⎰==4176.0f 5824.0a 1 故⎰----+=+-=)()())(()(1111z 717.01z 5824.0z z 4176.01z 1z e φW 所以数字控制器的脉冲函数为)z 1)(z 4176.01(z 368.015826.1z a z e z e -1z 111----+-==)()()()()(W W D 检验:用U (z )=D(z)E(z)=D(z)We(z)R(z)=1.5826-0.58241Z - 由Z 变换定义,知⎪⎩⎪⎨⎧=⋯===-==0)4()3()2(5824.0)(5826.10u t u t u t u t u )(可见系统经过2拍后,即K ≥,u(kt)=0,其输出响应曲线无纹波跟随输入信,系统调节时间号s 2.02t s ==T(2)按单位阶跃输入设计的D(z)改为单位速度输入U (z )=D (z )We (z )R (z ) =211z 1111z 1*z 4176.01z 4176.01z 1z 368.015826.1)()())()((-------++--T 2121z 1z 0582.0z 1582.0)(-----==0.15821z -+0.09462z -0.09463z -+… 由Z 变换定义,知⎪⎩⎪⎨⎧=⋯=====1t 4u t 3u t 2u 1582.0t u 00u )()()()()(可见,系统经过2个节拍后也达到稳定,系统调节时间为s2.02t s ==T1.已知数字控制器脉冲传递函数D(z)为:D(z)=6z 5z 12z z 22++++,试用直接程序设计法写出实现D(z)的公式 解:根据直接程序设计法知: n=2①212122226z 5z 1z 2z 1z 6)5z (z z 1)2z (z D(z)------++++=∙++∙++= 又∵②E(z)U(z)D(z)= 根据①②公式,得21216U (z )z5U (z )z E (z )z 2E (z )z E (z )U (z )------++= 由上,可知6b ,5b ,1a ,2a ,1a ,m n 21210-======再进行z 的反变换,便可求得数字控制器的差分方程2)6u(k 1)5u(k 2)e(k 1)2e(k e(k)u(k)-----+-+=2.设数字控制器65z z 4-3z z D(z)22+++=,使用串行程序设计法写出D(z)的迭代表达式 解:首先将分子分母因式分解①3)2)(z (z 1)4)(z (z 65z z 4-3z z D(z)22++-+=+++= ②11112z14z 12z 4z E(z)(z)U (z)D --++=++== ③11123z1z 11z 1z (z)U U(z)(z)D --+-=+-== 由②式,得④1111(z)z 2U 4E(z)z E(z)(z)U ---+=由③式,得⑤11113U(z)z (z)z U (z)U U(z)----=由④,⑤进行z 的反变换,得{1)(k 2u 1)4e(k e(k)(k)u 1)3u(k 1)(k u (k)u u(k)1111---+=----=最少拍计算机控制系统,该系统广义对象脉冲传递函数为G (z )=))(()(1111-z 368.01z 1z 718.01z 368.0-----+,采样周期=0.5s 解:由于输入r (t )=t ,查表知We (z )=(1-z 1-) 由))(())(()()()()(1111z 718.01z -1z 368.01z 5.01435.5z e z z e -1z ----+--==W G W D 查验:查表知系统闭环脉冲传递函数21z 2z 2z ---=)(φ当输入为单位连接信号时,系统输出序列Z 变换 ⋯⋯+++=--==-------43221121432)1()22()()(z TZ TZ TZ Z TZ z z z R z C φ)( 上式中各项系数经两拍以后,输出量完全等于输入采样值,即C (KT )=R (KT ),即符合题目要求。
最少拍控制系统设计

能源与动力工程学院课程设计报告题目:最少拍控制系统设计课程:计算机控制技术课程设计专业:班级:姓名:学号:《计算机控制技术》课程设计任务书一、 课程设计目的课程设计是课程教学中的一项重要内容,是达到教学目标的重要环节,是综合性较强的实践教学环节,它对帮助学生全面牢固地掌握课堂教学内容、培养学生的实践和实际动手能力、提高学生全面素质具有很重要的意义。
《计算机控制技术》是一门实用性和实践性都很强的课程,课程设计环节应占有更加重要的地位。
计算机控制技术的课程设计是一个综合运用知识的过程,它需要控制理论、程序设计、硬件电路设计等方面的知识融合。
通过课程设计,加深对学生控制算法设计的认识,学会控制算法的实际应用,使学生从整体上了解计算机控制系统的实际组成,掌握计算机控制系统的整体设计方法和设计步骤,编程调试,为从事计算机控制系统的理论设计和系统的整定工作打下基础。
二、 课程设计内容设计以89C51单片机、ADC 、DAC 等电路和运放电路组成的被控对象构成的单闭环反馈控制系统。
1. 硬件电路设计:89C51最小系统加上模入电路ADC0809和模出电路DAC0832;由运放构成的被控对象。
2. 控制算法:最少拍控制、PID 。
3. 软件设计:主程序、定时中断程序、A/D 转换程序、滤波程序、D/A 输出程序、最少拍控制程序等。
三、 课程设计要求1. 模入电路能接受双极性电压输入(-5V~+5V ),模出电路能输出双极性电压(-5V~+5V )。
2. 被控对象每个同学选择不同:510(),()(1)(0.81)(1)(0.41)G s G s s s s s ==++++45(),()(0.41)(0.81)G s G s s s s s ==++58(),()(1)(0.21)(0.81)(0.21)G s G s s s s s s s ==++++55(),()(0.81)(0.31)(0.81)(0.21)G s G s s s s s ==++++3. 设计无纹波最少拍控制器。
最小拍控制系统的设计

广义被控对象零极点的分布:
圆外极点 无 ,
圆外零点 p1 2.78 延时因子 z1 输入函数的阶次
i0
, j1
r 1
p1
(2) 确定期望的闭环结构
e (z) (1 z1 )F2 (z) (z) z(r1) (b1z1 )(1 2.78z1 )F1(z)
取 F1(z)、F2 (z)为最低阶,即 F1(z) 1 、F2(z) (1 cz1 )
典型输入的Z变换具有如下形式:
1)单位阶跃输入
r(t) 1(t), R(z) 1 (1 z 1 )
2)单位速度输入 r(t) t, R(z) Tz1 (1 z 1 )2
3)单位加速度输入
r(t) 1 t 2 , R(z) T 2 z 1(1 z 1)
2
2(1 z 1 )3
由此可得典型输入函数的一般表达式:
图16换接程序最小拍系统2提高最小拍系统对参数变化的适应性鲁棒性如果被控对象的时间常数发生变化使对象脉冲传递函数变为准确模型有模型误差由于对象参数的变化实际闭环系统的极点已变偏离原点按最小拍控制设计的闭环系统只有多重极点
6.1 最小拍控制
本节主要内容
1.闭环脉冲传递函数的结构设计 2.最小拍有纹波控制器的设计 3.最小拍无纹波控制器的设计 4.最小拍系统的改进措施
环稳定,D( z )也稳定。
G(z) N (z) N (z) 本身不稳定,由 D(z) M(z) M(z) (z)
M (z) M (z)
N (z) N (z) e (z)
可知,既要保证闭环稳定,又要保证控制器本身稳定, (z) 和D(z)中均不能包含圆外极点。
则:① (z) 必须包含 G(z) 的全部圆外圆上的零点
最少拍控制系统的设计
最少拍控制系统的设计第24卷第2期昆明理工大学学报Vol. 24No. 21999年4月JOURNAL OF KUNMIN G UN IV ERSIT Y OF SCIENCE AND TECHNOLO GY Apr. 1999最少拍控制系统的设计李红松吕() Ξ摘要. 本文从理论上详细.;;Z 变换TP273最少拍设计是系统在典型的输入作用下, 设计出数字调节器, 使系统的调节时间最短或者系统在有限个采样周期内结束过渡时期. 最少拍控制实质上是系统以最快速度达到稳态, 系统的性能指标是调节时间最短.典型输入的Z 变换形式为R (z ) =-1(1-z -1) m最少拍控制系统如图1所示, 图中D (Z ) 是数字调节器模型, 由计算机实现. H0(s ) 是零阶保持器的传递函数. G (S ) 是控制对象的传递函数.图1 最少拍控制系统零阶保持器和控制对象离散化以后, 成为广义对象的Z 传递函数HG (Z ) .HG (Z ) =Z[H 0(s ) G (S ) ]最少拍控制系统的闭环Z 传递函数G c (z ) =1+D (z ) HG (z )最少拍控制系统的误差Z 传递函数G e (z ) ==1-G c (z ) =R (z ) 1+D (z ) HG (z )() 则最少拍控制系统的调节器() D (z ) = 或 D (z ) =G e (z ) HG (z ) G e (z ) HG (z )控制系统的调节时间也就是系统的误差e (k T ) 达到恒定值或趋于零所需的时间, 根据Ξ收稿日期:1999-01-20・162・昆明理工大学学报1999年Z 变换的定义∞E (z ) =k =0∑e (k T ) z -k =e (0) +e (T ) z -1+e (2T ) z -2+e (3T ) z -3+…+(k T ) z -k则根据E (z ) 就可以知道e (0) , e (2T ) , …, e (k T ) . 输入作用下, 当k大于或等于N 时, e (k T ) . N Z 传递函数有:-1E (z ) (z ) ) G (z 1-z -1) m, (z 是尽可能少的有限项, 必须合理地选择误差Z G e (z ) =(1-z -1) M F (z ) M ≥m的有限多项式, 不含有(1-z -1) 因子, 则可能使E (z ) 是有限式多项式. 当选择M =m , 且F (z ) =1时, 不仅可以使数字调节器简单, 阶数比较低, 而且, 还可以使E (z ) 的项数最少, 因而调节时间最短. 对于不同的输入, 可以选择不同的误差Z 传递函数. F (z ) 是z -1由以上推导可看出, 最少拍调节器D (z ) 和系统的输入形式有关, 也跟对象的特性HG (z ) 有关, 因此要注意以下几点.1) 若D (z ) 中存在z r 环节, 则表示数字调节器应具有超前特性. 这样的超前环节是不可能实现的. 所以HG (z ) 分子中含有z -r 因子时, 必须使闭环Z 传递函数G c (z ) 的分子中含有z -r 因子, 以抵消HG (z ) 中的z -r , 以免D (z ) 中出现超前环节.2) 若HG (z ) 中存在单位圆上(Z =1除外) 和单位圆外的零点时, 则D (z ) 将是发散不可实现的. 因此, D (z ) 中不允许包含HG (z ) 的这类零点, 也不允许它们作为Ge (z ) 的极点, 所以只能把HG (z ) 中的这类零点作为G e (z ) 的零点, 从而保证D (z ) 的稳定性. 当然这将使调节时间加长.3) 若HG (z ) 中存在单位圆上(P =1除外) 和单位圆外的极点时, 为了保证系统的输出稳定, 必须由D (z ) 或G e (z ) 的零点将之对消掉. 但是不允许采用增加D (z ) 的零点以对消HG (z ) 的不稳定极点的方法, 因为对象参数的微小飘移, 将有可能对消不完全, 造成系统的不稳定, 因此HG (z ) 的不稳定极点只能用G e (z ) 的零点来对消.4) 系统调节时间为一到几个采样周期, 不可能通过无限增加采样频率来减少调节时间. 事实上从能量的角度来说, 不可能提供无穷大能量, 使系统在一瞬间从某种状况进入到别一种状态. 另外采样频率受到饱和特性的限制, 不可能无限提高. 最少拍控制系统的设计方法是简便的, 结构也是简单的, 设计结果可以得到解析解, 便于计算机实现, 但它也存在如下一些问题:1) 最少拍系统对输入形式的适应性差.2) 最少拍系统对参数的变化很敏感.3) 只能保证采样点上误差为零或恒值, 不能保证采样点之间的误差也为零或恒值.由于这种设计方法只能保证采样点上误差为零或恒值, 不能保证采样点之间的误差也为零或恒值. 因此又提出了最少拍无纹波设计. 根据分析, 纹波是由于零阶保持器的输入的波动造成的, 设它为e 2(k T ) . 无纹波设计就是要求经过有限拍以后, e 2(k T ) 保持恒值或零.由于E 2(z ) =D (z ) E (z ) =D (z ) G e (z ) R (z ) , 若选定D (z ) G e (z ) 是z -1的多项式,第2期李红松等:最少拍控制系统的设计・163・那么, 在确定的输入作用下, 经过有限拍, e 2(k T ) 就能达到某恒定值, 而且能保证系统的输出没有纹波.D (z ) G e (z ) =()HG (z )因此最少拍无纹波的设计, 要求G c (z ) HG z ) . . , G e (z ) 的零点包含HG(z ) 的单位圆上(Z =1. 下面作一简要介绍., 当输入单位跃阶时, 超调量很大. 为了改善过渡过程, . 设系统如图所示.图2 换接程序系统图中, D r (z ) 是按照单位速度输入设计的最少拍调节器D r (z ) =() G e (z ) =(1-z -1) 2A r (z ) () () G e z HG z () G e (z ) =(1-z -1) A s (z ) G e (z ) HG (z ) D s (z ) 是按照单位阶跃输入设计的最少拍调节器Ds (z ) =HG (z ) 是广义对象的Z 传递函数.系统刚投入时, 相当于阶跃输入, D s (z ) 接入系统, 作为过渡程序, 当系统的误差e 1(k T ) 减少到一定程度, 例如|e 1(k T ) |≤E m 时, 再接入正常的跟踪程序D r (z ) . E m 可以根据系统的运行情况, 选择适当的数值. 这种换接程序的方法, 既可以缩短调节时间, 又可以减少超调量. 换接程序的子程序流程图如图3所示.综上所述, 最少拍系统有许多优点, 但是它对输入型式很敏感. 在实际应用中, 要根据实际情况来灵活应用最少拍系统设计方法.参考文献1 谢剑英. 计算机控制. 北京:国防工业出版社,1991. 166~1782 张宇河, 金钅玉. 计算机控制系统, 北京:北京理工大学出版社,1996. 91~1093 郭锁凤. 计算机控制系统. 北京:航空工业出版社,1987. 124~135图3 换接程序的子程序流程(下转第171页)第2期田云鹏:论计算机局域网的维护和管理・171・参考文献1 [美]BillLawrence 著《. Novell Netware 4使用指南》. . 北京:,1995. 45~60,120~1352 [美]Novell公司著《. Netware 4网络管理》. . :27~38,157~164,218~2234 白英彩等《. Novell LAN . 61~66,134~146,237~2665 ,72,88,296,375Defending and Managent of Lacal N et workTain Yunpeng(Yunan Radion and TV University , Kunming 650223)Abstract The defending and management of LAN are vital assurance in order to enable the network to work stably ans safely and to utilize network resources. With the extending of network and application systems ,channelcapacities and signal jams become inevitable. This article elaborated areleted solution for thisproblem.local network ;defending ;netware ;signal jam. K ey w ords(上接第163页)The Design for the Least Time Control SystemLi Hongsong Li Yang(Computer Depertment Kunming University of Science and Technology , Kunming 650093)Abstract In the computer control system , the least time control system has been used widely. This article details the ways of how to design the least time control system being often used in projects.K ey w ords The least time ;transfer function ;Z translation。
最少拍数字控制器的设计
最少拍数字控制器的设计第一篇:最少拍数字控制器的设计离散控制系统最少拍控制摘要本次设计针对一阶惯性积分系统在单位速度信号输入作用下进行最少拍数字控制器的设计,验证了最少拍控制器的优点,并对最少拍算法进行理论分析,分别设计出最少拍有纹波和无纹波数字控制器,利用 MATLAB 仿真平台对设计的最少拍数字控制器进行系统仿真研究,并对有纹波和无纹波系统进行对比研究。
关键词最少拍控制;无纹波控制器;有纹波控制器;Matlab仿真离散控制系统最少拍控制目录摘要 (1)第一章最少拍有纹波控制器设计 (3)1.1 设计原理..............................................................................3 1.2 设计举例..............................................................................5 第二章最少拍无纹波控制器设计..........................................................5 2.1 设计原理..............................................................................5 2.2 设计举例..............................................................................6 第三章基于Matlab的最少拍控制的实现................................................7 3.1 输入单位阶跃信号..................................................................7 3.2 输入单位速度信号..................................................................8 3.3 输入单位加速度信号............................................................9 参考文献..........................................................................................10 致谢 (11)离散控制系统最少拍控制离散控制系统最少拍控制最少拍系统控制设计是指系统在典型输入信号(如单位阶跃输入信号、单位速度输入信号、单位加速度输入信号等)作用下,经过最少拍(有限拍),使系统输出的稳态误差为零。
最少拍实验
实验二 最小拍控制系统班级:自控091班 姓名:康肖亮 学号:2009097581、 实验目的与要求(1) 掌握最小拍有纹波、无纹波系统的设计方法;(2) 学会对最小拍系统的分析方法;(3) 了解输入信号对最小拍控制系统的影响及其改进措施。
2、 实验设备(1) 硬件环境微型计算机一台,P4以上各类微机(2) 软件平台操作系统:Windows2000MATLIB6.5仿真软件3、 实验原理最小拍控制是一种直接数字设计方法。
所谓最小拍控制,就是要求闭环系统对于某种特定的输入在最少个采样周期内达到无静差的稳态,使系统输出尽快地跟踪期望值的变化。
它的闭环z 传递函数具有形式N N z z z z z ----+++=φφφφφ 332211)(在这里,N 是可能情况下的最小正整数。
这一传递形式表明闭环系统的脉冲响应在N 个采样周期后变为零,从而意味着系统在N 拍之内达到稳态。
控制原理图如下图:(1) 输入信号为单位阶跃信号,设计控制器)(z D ;(2) 采样周期T=1s 。
4、 实验内容与步骤(1) 按要求设计计算)(z D 为有纹波控制器和无纹波控制器;(2) 按照系统原理图,在simulink 下构造系统结构图模型;取输入信号为单位阶跃信号,设计控制器,观察输入输出波形,打印结果;(3) 观察系统输出波形在采样点以外的波形;(4) 比较有文波和无文波的区别,分析其原因。
5、 实验设计:(1)最少拍有纹波设计:图1 单位阶跃输入下有纹波控制系统仿真结构模型图2 控制器输出波形图3 系统输出波形(2)最少拍无纹波设计:图4 单位阶跃输入下无纹波控制系统仿真结构模型图5 控制器输出波形图6 系统输出波形6、思考与分析(1) 最少拍受什么限制而使调整节拍增加?答:对于最少拍系统,输入函数()R z 的阶数越高调节时间越长。
(2) 无纹波系统对控制器有何要求?答:无纹波最少拍系统的设计准则是:被控对象0()G z 必须包含有足够的积分环节。
控制技术实验报告--基于Matlab的最少拍控制系统设计

计算机控制技术--基于Matlab的最少拍控制系统设计学院:计算机科学与技术班级:计科0902班学号:姓名:指导老师:日期:2012年12月10日实验五 基于Matlab 的最少拍控制系统设计一、 实验目的学习使用Matlab 设计最少拍系统的方法二、 实验器材x86 系列兼容型计算机,Matlab 软件三、 实验原理系统如图所示,建立相应的数字PID 系统和最少拍系统并进行仿真。
1. 数字PID 系统设计建立所示的数字PID 系统控制模型并进行系统仿真,已知)2)(1(10)(++=s s s G p ,采样周期T=0.1s 。
2. 最少拍系统仿真计算机控制系统 仿真实验建立所示的数字PID 系统控制模型并进行系统仿真,已知)1(10)(+=S S S G p ,采样周期T=1s 。
广义被控对象脉冲传递函数:)3679.01)(1()718.01(679.3])1(1[)]([)(1111z z z z e s s KsZ s G Z z G Ts-------+=+∙-==,则G(z)的零点为-0.718(单位圆内)、极点为1(单位圆上)、0.368(单位圆内),故 u=0,v=1,m=1。
a. 有纹波系统单位阶跃信号:根据稳定性要求,G(z)中 z=1 的极点应包含在 Φe(z)的零点中,系统针对阶跃输入进行设计,q=1,显然准确性条件中已满足了稳定性要求,于是可设ϕ1)(z z -=Φ,根据1)1(=Φ,求得1=ϕ,则zz 1)(-=Φ,zzz z z G z D 11718.01)3679.01(2717.0)(1)()(1)(--+-=Φ-Φ=。
b. 无纹波系统单位阶跃信号:根据稳定性要求,G(z)中 z=1 的极点应包含在)(z eΦ的零点中,系统针对阶跃输入进行设计,q=1,显然准确性条件中已满足了稳定性要求,于是可设)718.01()(11z z z --+=Φ,根据1)1(=Φ,求得58.00=ϕ,则)718.01(582.0)(11z z z --+=Φzz zz z z z G z D 2121418.0582.01)3679.03679.01(158.0)(1)()(1)(------=-=Φ-Φ=。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验二最少拍控制系统设计2015 实验二基于MATLAB的最少拍控制系统设计一、实验目的:1(掌握最少拍有纹波、无纹波系统的设计方法;2(学会对最少拍控制字体的分析方法;3(了解输入信号对最少拍控制系统的影响及改进措施二、实验内容:设单位反馈线性定常系统的连续部分和零阶保持器的传递函数分别为:,sTe21,, GsG(s),(),0hss(s,1),采样周期T=1秒。
要求系统在单位阶跃输入时实现最少拍控制,求数字控制器的脉冲传递函数。
讨D(z)论加上控制器后的系统输出在采样点之间是否存在纹波,若存在纹波,请设计最少拍无纹波控制器。
系统结构如图: Ys()R(s)D(z)Gs()G(s)h0T-例:Ys()R(s)D(z)Gs()G(s)h0T-设单位反馈线性定常系统的连续部分和零阶保持器的传递函数分别为:,sTe11,Gs, G(s),(),0hss(s,1),采样周期T=1秒。
要求系统在单位斜坡输入时实现最少拍控制,求数字控制器的脉冲传递函数。
讨D(z)论加上控制器后的系统输出在采样点之间是否存在纹波,若存在纹波,请设计最少拍无纹波控制器。
1、设计最少拍控制器: 步骤:(1)确定有零阶保持器的广义对象G(z)clear all;Close all;clc;G=zpk([],[0,-1],1); %零极点形式的被控对象T=1; %采样周期Gd=c2d(G,T,'zoh'); %广义被控对象脉冲传函广义被控对象的脉冲传递函数为:0.36788 (z+0.7183)------------------(z-1) (z-0.3679)可知,广义被控对象没有单位圆外的零极点,也没有纯滞后。
即i=j=l=0。
(2)输入为单位斜坡时,m=2,s=j+m=2,t=l+i=0 最少拍系统应具有的误差脉冲传递函数、闭环脉冲传递函数分别为:,1,2 ,(z),mz,mz12,12 1()(1),,,,zz求待定系数,得:2z,112,,,(z),2z,z,2 z2z,2z,1,1,2 1,,(z),1,2z,z,2z(3)确定数字控制器 D(z),()z Dz(),Gzz()1()][,,(4)闭环系统输出: YzRzzUzGz()()()()(),,,,,数字控制器的输出: U(z),E(z),D(z)程序:clear all;clc;G=zpk([],[0,-1],1); %零极点形式的被控对象 t=0:0.01:10;u=t; %单位斜坡输入figure(1);lsim(G,u,t); %求未加控制器时系统的单位斜坡响应 title('未加控制器时开环系统的单位斜坡响应,灰线:系统输入;蓝线:系统输出');T=1; %采样周期Gd=c2d(G,T,'zoh'); %广义被控对象脉冲传函phie=tf([1 -2 1],[1 0 0],T); %误差脉冲传函 phi=tf([0 2 -1],[1 0 0],T); %闭环脉冲传函 D=phi/(Gd*phie); %数字控制器脉冲传函D(z)Phie,phi,Gd,D[num1,den1]=tfdata(Gd,'v');[num2,den2]=tfdata(D,'v');ud_1=0;ud_2=0;ud_3=0;ud_4=0;ud_5=0;yd_1=0;yd_2=0;ed_1=0;ed_2=0;ed_3=0;ed_4=0;ed_5=0;for k=1:1:35time(k)=k*T;rin(k)=k*T; %单位斜坡信号%加数字控制器的差分方程yd(k)=num1(2)*ud_1+num1(3)*ud_2-den1(2)*yd_1-den1(3)*yd_2;ed(k)=rin(k)-yd(k); %求偏差%数字控制器的差分方程ud(k)=(num2(1)*ed(k)+num2(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3+num2(5)* ed_4+num2(6)*ed_5-den2(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3-den2(5)*ud_4-den2(6)*ud_5)/den2(1);%数据更新ud_5=ud_4;ud_4=ud_3;ud_3=ud_2;ud_2=ud_1;ud_1=ud(k);ed_5=ed_4;ed_4=ed_3;ed_3=ed_2;ed_2=ed_1;ed_1=ed(k);yd_2=yd_1;yd_1=yd(k);endyd,udfigure(2);plot(time,rin,'r',time,yd,'b',time,ud,'k');xlabel('time');ylabel('rin,yd,ud');title('加数字控制器后单位速度信号的闭环响应及数字控制器的输出'); text(3,23,'红线:系统输入;蓝线:系统输出;黑线:控制器输出');未加控制器时开环系统的单位斜坡响应,灰线:系统输入;蓝线:系统输出908070605040AmplitudeSystem: GTime (seconds): 5.95Amplitude: 25.53020100012345678910Time (seconds)由图可知,未加控制器的开环系统是不稳定的。
输入按照单位斜坡变化,而输出与输入的差异越来越大。
不能稳定。
为实现最少拍控制,需加控制器。
加数字控制器后的单位斜坡信号的闭环响应及数字控制器的输出25红线:系统输入;蓝线:系统输出;黑线:控制器输出201510rin,yd,ud5X: 2Y: 2-50510152025time系统输出序列:yd =Columns 1 through 90 2.0000 3.0000 4.0000 5.0000 6.0000 7.0000 8.0000 9.0000Columns 10 through 1810.0000 11.0000 12.0000 13.0000 14.0000 15.0000 16.0000 17.0000 18.0000Columns 19 through 2719.0000 20.0000 21.0000 22.0000 23.0000 24.0000 25.0000 26.0000 27.0000Columns 28 through 3528.0000 29.0000 30.0000 31.0000 32.0000 33.0000 34.0000 35.0000 控制器输出序列:ud =Columns 1 through 95.4366 -3.1867 4.0072 -1.1600 2.5515 -0.1144 1.8005 0.4250 1.4130Columns 10 through 180.7034 1.2131 0.8470 1.1099 0.9210 1.0567 0.9593 1.0293 0.9790Columns 19 through 271.0151 0.9892 1.0078 0.9944 1.0040 0.9971 1.0021 0.9985 1.0011Columns 28 through 350.9992 1.0006 0.9996 1.0003 0.9998 1.0001 0.9999 1.0001可知,加数字控制器后,系统输出与系统输入在2s以后相等,说明系统是稳定的且稳态无静差。
调节时间为2s,但观察其数字控制器输出曲线及输出序列发现,其控制器输出在28拍(28s)后才变为恒定值,说明输出在第3拍至第28拍间,仅能保证在采样点上与输入相同,在采样点间不相同,即输出有纹波。
此时闭环脉冲传函为:2 z - 1-------z^2误差脉冲传函为:z^2 - 2 z + 1-------------z^2数字控制器为:5.4366 z^2 (z-0.5) (z-0.3679) (z-1) -----------------------------------z^2 (z+0.7183) (z-1)^22、最少拍无纹波控制器:步骤:(1)确定有零阶保持器的广义对象,广义被控对象脉冲传函: G(z)0.36788 (z+0.7183)------------------(z-1) (z-0.3679)广义被控对象没有单位圆外的零极点,也没有纯滞后。
即i=j=l=0。
(2)由G(z)有一个单位圆内的零点-0.7183,要实现无纹波,则最少拍系统的闭环脉冲传递函数要求将单位圆内圆外的所有零点都包含进来。
此时零点个数i=1。
(3)输入为单位斜坡时,m=2,s=j+m=2,t=l+i=0+1=1。
应具有的误差脉冲传递函数、闭环脉冲传递函数分别为:(z,0.7183)(az,b)112112,,,,,,,(z),(1,0.7183z)(mz,mz),(1,0.7183z)(az,bz),123 z2(z,2z,1)(z,f)121121,,,,,1,,(z),(1,z)(1,fz),(1,2z,z)(1,fz),3 z 因,有 1,,(z),,(z),12(z,0.7183)(az,b)(z,2z,1)(z,f),,133 zzf=(1+0.718*2)/(2.718+1/0.718); 得方程组:a=2-f;b=-f/0.718;(3)确定数字控制器D(z),()z Dz(),Gzz()1()][,,(4)闭环系统输出:YzRzzUzGz()()()()(),,,,,数字控制器的输出:U(z),E(z),D(z)程序:clear all;close all;clc;G=zpk([],[0,-1],1); %%零极点形式的被控对象 t=0:0.01:10;u=t; %单位斜坡输入figure(1);lsim(G,u,t); %求未加控制器时系统的单位斜坡响应 title('未加控制器时开环系统的单位斜坡响应,灰线:系统输入;蓝线:系统输出');T=1; %采样周期Gd=c2d(G,T,'zoh'); %广义被控对象脉冲传函%求误差脉冲传函及闭环脉冲传函z=tf([1 0],[1],1);%定义z为算子f=(1+0.718*2)/(2.718+1/0.718);a=2-f;b=-f/0.718;phie=(z^2-2*z+1)*(z+f)/z^3; %误差脉冲传函 phi=(a*z+b)*(z+0.718)/z^3; %闭环脉冲传函 D=phi/(Gd*phie); %数字控制器脉冲传函D(z) Gd,D,phie,phi [num1,den1]=tfdata(Gd,'v');%求脉冲传函的分子分母多项式[num2,den2]=tfdata(D,'v');ud_1=0;ud_2=0;ud_3=0;ud_4=0;ud_5=0;ud_6=0;ud_7=0;yd_1=0;yd_2=0;ed_1=0;ed_2=0;ed_3=0;ed_4=0;ed_5=0;ed_6=0;ed_7=0;for k=1:1:25time(k)=k*T;rin(k)=k*T; %单位斜坡信号%加数字控制器的差分方程yd(k)=num1(2)*ud_1+num1(3)*ud_2-den1(2)*yd_1-den1(3)*yd_2;ed(k)=rin(k)-yd(k);%数字控制器的差分方程ud(k)=(num2(1)*ed(k)+num2(2)*ed_1+num2(3)*ed_2+num2(4)*ed_3+num2(5)* ed_4+num2(6)*ed_5+num2(7)*ed_6+num2(8)*ed_7-den2(2)*ud_1-den2(3)*ud_2-den2(4)*ud_3-den2(5)*ud_4-den2(6)*ud_5-den2(7)*ud_6-den2(8)*ud_7)/den2(1);ud_7=ud_6;ud_6=ud_5;ud_5=ud_4;ud_4=ud_3;ud_3=ud_2;ud_2=ud_1;ud_1=ud( k);ed_7=ed_6;ed_6=ed_5;ed_5=ed_4;ed_4=ed_3;ed_3=ed_2;ed_2=ed_1;ed_1=ed( k); yd_2=yd_1;yd_1=yd(k);endyd,udfigure(2);plot(time,rin,'r',time,yd,'b',time,ud,'k');xlabel('time');ylabel('rin,yd,ud');title('加数字控制器后单位速度信号的闭环响应及数字控制器的输出'); text(1.5,4.5,'红线:系统输入;蓝线:系统输出;黑线:控制器输出');加数字控制器后单位速度信号的闭环响应及数字控制器的输出25红线:系统输入;蓝线:系统输出;黑线:控制器输出2015rin,yd,ud10X: 35Y: 300510152025time 系统输出序列:yd =Columns 1 through 90 1.4074 3.0000 4.0000 5.0000 6.0000 7.0000 8.0000 9.0000Columns 10 through 1810.0000 11.0000 12.0000 13.0000 14.0000 15.0000 16.0000 17.0000 18.0000Columns 19 through 2519.0000 20.0000 21.0000 22.0000 23.0000 24.0000 25.0000控制器输出序列:ud =Columns 1 through 93.8257 0.1737 1.0009 0.9994 1.0005 0.9997 1.0002 0.9998 1.0001Columns 10 through 180.9999 1.0001 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000Columns 19 through 251.0000 1.0000 1.0000 1.0000 1.0000 1.0000 1.0000由图可以看出,此时调节时间变为3s,调节时间比原来延长1拍,但其控制器输出也在3拍后变为恒定值(只有0.0005左右的差异,可忽略),可以保证3拍后,输出不仅在采样点上与输入相同,还在采样点间保证相同,实现输出无纹波。