驱动类型介绍
几种步进电机的驱动方式

步进电机常见的三种驱动方式包括全步进驱动、半步进驱动和微步进驱动。
全步进驱动简单易实现,适用于对转矩要求不高的场合;半步进驱动具有更高的分辨率和更平滑的运动,适用于对定位要求较高的场合;微步进驱动则是最精细的驱动方式,通过控制电流的大小和方向实现步进电机的转动,适用于对定位精度要求极高的场合。
选择适当的驱动方式需要根据具体应用需求来决定。
全步进驱动简单、成本低,适用于一些普通的工业自动化应用;半步进驱动在精确性和平稳性方面提供了更好的性能,适用于精密定位的应用;而微步进驱动则可以提供最高的分辨率和最平滑的运动,适用于高精密仪器和光学设备等领域。
全步进驱动是最常见的步进电机驱动方式之一。
它通过改变电流的方向和大小来实现步进电机的转动。
具体工作原理如下:1.单相全步进驱动:在单相全步进驱动中,通过向两个相邻线圈施加电流,使得步进电机转动一个步进角度。
该驱动方式简单易实现,但转矩较小。
2.双相全步进驱动:双相全步进驱动是一种更为常见的驱动方式。
它通过按照特定的顺序向两个线圈施加电流来实现步进电机的转动。
该驱动方式相比单相全步进驱动具有更高的转矩和更稳定的运行。
全步进驱动方式简单直观,适用于对转矩要求不高的场合。
2.半步进驱动半步进驱动是介于全步进驱动和微步进驱动之间的一种驱动方式。
在半步进驱动中,通过改变电流的方向和大小来实现步进电机的转动。
具体工作原理如下:1.与全步进驱动类似,半步进驱动也可以采用单相和双相两种驱动方式。
其中,双相半步进驱动是最常见的。
2.在双相半步进驱动中,首先向一个线圈施加电流,使得步进电机转动半个步进角度。
然后再向另一个线圈施加电流,使得步进电机再次转动半个步进角度。
通过交替改变电流的方向和大小,可以实现精确的定位。
半步进驱动方式相比全步进驱动方式,具有更高的分辨率和更平滑的运动。
适用于对定位要求较高的场合。
3.微步进驱动微步进驱动是步进电机中最精细的驱动方式,通过分段控制电流的大小和方向来实现步进电机的转动。
卡车驱动形式的介绍

卡车驱动形式的介绍我们常见的卡车的驱动形式有4×2、6×2、6×4、8×2、8×4等。
01、按轮位解读“×”前面的数字表示车辆的车轮位总数。
“×”后面的数字表示驱动轮位数。
比如:4×2中就有4个轮位,其中2个是驱动轮位。
6×2中就有6个轮位,其中2个是驱动轮位。
02、按轴数解读“×”前后数字分别除以2,得到的就是汽车轴数和驱动轴轴数。
比如:6×4中6除以2得3就是指该车共有3轴,4除以2得2就是指该车有2个是驱动轴。
8×4中8除以2得4就是指该车共有4轴,4除以2得2就是指该车有2个驱动轴。
03、看似简单,却各有千秋4×2两车轴转向驱动各一根4×2驱动形式的车有两跟车桥,一根用于转向,一根用于驱动。
6×2驱动形式主要有三种类型:6×2前双导、6×2后桥随动、6×2后桥提升。
我们接下来一一来看:6×2三兄弟各有各特点首先是6×2前双导:大部分卡车前双桥为转向桥,后桥为驱动桥。
6×2后桥随动:大部分卡车前桥为转向桥,中桥为驱动桥,后桥为随动支撑桥。
6×2后桥提升是6×2驱动形式在进口车中比较常见,通常情况下中桥为驱动桥,后桥是提升随动桥,这种驱动形式的好处在于空载时可将后两轮抬起,减少轮胎滚阻,提高燃油经济效率,增长第三桥轮胎寿命。
6×4双桥驱动,驱动力大6×4是我们听的最多的,也就是大家口中的“后八轮”、“后双桥”,6×4中大部分卡车前桥为转向桥,两根后桥为驱动桥,四个轮位同时驱动,驱动力较大。
它是牵引车的主流驱动形式,同时在自卸车中也很常见。
8×4双转向双驱动,稳定性顶呱呱8×4驱动形式的卡车大多数前两桥为转向桥,后面两桥为驱动桥。
产品的三种驱动类型-技术、销售和市场驱动
产品 -产品的三种驱动类型:技术、销售和市场驱动 (转载)
聪明兔 收藏于 2011-02-21 阅读数:13
被转藏:4
公众公开 原文来源 举报
转藏到我的图书馆
推荐给朋友
产品 -产品的三种驱动类型:技术、销售和市场驱动 我们公司有成熟产品和实验室产品,有单机工具型产品,也有网 络管理型产品,对于产品来说,我觉得主要有三类因素来驱动产 品: 1.
2.
销售驱动 这类产品有个特点,就是用户很明确知道他需要什么,以及市场基本已经出现很多类似厂商 参与竞争。它注重短期,在需求上风险较小,与竞争对手差异性不大,价格和服务是主要的 市场竞争工具 <!--[if !supportLists]--><!--[endif]-->市场驱动 这类产品有个明显的特点就是关注客户,注重长期,由客户需要驱动产品发展。与销售驱动 相比,市场驱动更注重大的蓝图,投入也大,风险也大。它需要让客户参与,并分析他们的 需求。市场驱动有利于建立市场领导地位,并提供潜在的收入。
1
ቤተ መጻሕፍቲ ባይዱ
3.
现在很多产品都逐步转移到市场驱动型产品,也就是越来越接近用户。比如微软这类技术型公 司,近年来我们也能看到它不断发出RC版本或者社区版本等,不断与开发人员接触,发现开发人 员的需要。市场驱动一定是大部分产品开发的主要类型,不论是工具产品还是管理类型产品,都需 要围绕啊客户需求开展,从需求到开发和实施都需要考虑产品的整体性营销,随着信息化时代的来 临,更多的客户需要的不再仅是单独的工具,而是一套能够更全面解决问题的方案。做解决方案 时,我觉得应该用市场驱动来架构产品、用销售驱动来做产品、用技术驱动来创新产品。
电机驱动相关知识点

电机驱动相关知识点
电机驱动是指通过控制电机的旋转来实现机械运动的技术。
以下是一些关于电机驱动的基本知识点:
1. 电机类型:常见的电机类型包括直流电机、交流异步电机、交流同步电机和步进电机等。
每种类型的电机都有其独特的特性和应用领域。
2. 驱动方式:电机可以通过不同的方式进行驱动,如直流电驱动、交流电驱动、脉宽调制(PWM)驱动等。
驱动方式的选择取决于电机类型和具体应用需求。
3. 控制方法:电机的控制方法包括开环控制和闭环控制。
开环控制是指根据预设的控制信号来控制电机的运行,而闭环控制则通过反馈机制对电机的运行进行实时调整,以实现更精确的控制。
4. 速度控制:电机的速度控制可以通过调整供电电压、频率或脉宽来实现。
常用的速度控制方法包括调压调速、变频调速和PWM 调速等。
5. 转矩控制:除了速度控制,电机还可以进行转矩控制,即控制电机输出的转矩大小。
转矩控制在一些应用中非常重要,如工业机器人、电动工具等。
6. 保护功能:为了保护电机和相关设备,电机驱动系统通常具备过流保护、过压保护、过热保护等功能,以防止电机在异常情况下受到损坏。
7. 驱动器:电机驱动器是实现电机驱动控制的关键设备,它将控制信号转换为适合电机运行的电信号,并提供必要的保护和调节功能。
不同新能源乘用车的驱动电机类型和参数

第一部分:引言作为汽车行业发展的新热点,新能源乘用车在市场上越来越受到关注。
在新能源乘用车中,驱动电机是至关重要的组成部分之一。
不同的驱动电机类型和参数对于车辆性能和续航能力都有着重要的影响。
本文将深入探讨不同新能源乘用车的驱动电机类型和参数,帮助读者更全面地了解这一话题。
第二部分:驱动电机类型1. 交流驱动电机在众多新能源乘用车中,使用交流驱动电机的车型较为常见。
交流驱动电机具有响应速度快、输出扭矩大的特点,适合于提供优越的加速性能和动力输出。
然而,由于其结构复杂、成本较高,以及需要匹配的控制系统较为复杂,因此在应用中还存在一定的挑战。
2. 直流驱动电机相对于交流驱动电机,直流驱动电机在新能源乘用车中的应用相对较少。
然而,直流驱动电机由于结构简单、容易控制、维护成本低等优点,仍然在一些特定的车型中得到了应用。
尤其是在一些小型电动车和混动车中,直流驱动电机依然具有一定的市场份额。
3. 额外类型除了交流和直流驱动电机之外,还有一些新型驱动电机类型在新能源乘用车中得到了应用。
永磁同步电机、感应电机等,它们各自具有独特的特点和优势,在车辆性能和续航方面都有着重要作用。
第三部分:驱动电机参数1. 驱动电机功率驱动电机的功率直接关系到车辆的加速性能和动力输出。
通常情况下,功率更大的驱动电机可以带来更好的车辆性能。
但是,功率过大也可能导致车辆能耗增加,影响续航能力。
在选择驱动电机时需要权衡各方因素。
2. 最大扭矩最大扭矩是衡量驱动电机输出动力的重要参数之一。
与功率相比,最大扭矩更多地影响到了车辆的起步、爬坡和过弯性能。
在选择驱动电机时,需要根据车辆用途和需求来合理选择最大扭矩参数。
3. 效率驱动电机的效率直接关系到了能源利用的效果。
高效率的驱动电机可以在一定程度上提高车辆的续航能力,降低能源消耗。
在新能源乘用车中,选择高效率的驱动电机显得尤为重要。
第四部分:加入个人观点和理解在选择新能源乘用车时,驱动电机类型和参数是非常重要的考量因素。
汽车驱动形式的分类
汽车驱动形式的分类
汽车驱动形式的分类主要基于发动机的布置方式和驱动轮的数量、位置。
最基本的分类标准是按照驱动轮的数量,可分为两轮驱动和四轮驱动两大类。
两轮驱动形式包括前置后驱(FR)、前置前驱(FF)、后置后驱(RR)和中置后驱(MR)等。
其中,两驱越野车和轿车最常用的是前置后驱形式。
前置后驱的全称叫做前置发动机后轮驱动,是一种比较传统的驱动形式。
在这种驱动形式中,前排车轮负责转向,由后排车轮来承担整个车辆的驱动工作。
也就是说,实际的行进中是后轮“推动”前轮,带动车辆前进。
四轮驱动形式则包括前置四驱、中置四驱和后置四驱等。
此外,还有一些更复杂的驱动形式,如全轮驱动(AWD),这种形式在需要时可以提供更大的牵引力。
以上信息仅供参考,如有需要,可以查阅相关汽车书籍或者咨询专业人士。
mercedes eqc驱动类型
Mercedes EQC是梅赛德斯-奔驰公司首款全电动SUV车型,其强大的驱动类型是其主要卖点之一。
在这篇文章中,我们将对Mercedes EQC的驱动类型进行深入分析,并探讨其对车辆性能和驾驶体验的影响。
1. 双电动机驱动系统Mercedes EQC搭载了一套双电动机驱动系统,其中一个电动机安装在前轴,另一个电动机则安装在后轴。
这种布局使得EQC拥有强大的四轮驱动能力,不仅提升了车辆的驾驶稳定性,还能够在复杂路况下提供更加可靠的动力输出。
另外,双电动机的设计还为EQC提供了更加灵活的操控性能,让驾驶者能够更好地应对各种路况和驾驶需求。
2. 高效能电动系统除了双电动机的布局之外,Mercedes EQC还采用了高效的电动系统,包括先进的电池技术和智能的能量管理系统。
EQC搭载了一块容量为80kWh的锂电池,在一次充电的情况下能够提供超过400公里的续航里程。
这得益于EQC对电池能量的高效利用,以及其在行驶过程中对能量的智能管理。
相比传统燃油车型,EQC的高效能电动系统不仅降低了能源消耗,还减少了对环境的影响,符合当代对可持续出行的要求。
3. 低重心设计由于电池组的重量分布在车辆底部,Mercedes EQC拥有更低的重心设计。
这种设计不仅提升了车辆的驾驶稳定性,还改善了车辆的操控性能。
在高速行驶和急转弯时,EQC能够更好地保持车身的平衡,使驾驶者能够更加轻松地掌控车辆。
另外,低重心设计还有助于提升EQC的安全性能,为乘客提供更加可靠的保护。
4. 驾驶模式选择Mercedes EQC还提供多种驾驶模式选择,包括经济模式、舒适模式、运动模式和个性化模式等。
通过选择不同的驾驶模式,驾驶者能够调整车辆的输出动力、悬挂硬度、转向反应等参数,以满足不同的驾驶需求。
这些驾驶模式的灵活性使得EQC能够适应各种驾驶场景,从而提供更加个性化的驾驶体验。
5. 智能驾驶辅助系统除了强大的驱动类型之外,Mercedes EQC还配备了多项智能驾驶辅助系统,如自适应巡航控制、盲点辅助、自动紧急制动等。
变频器驱动的电机类型及特点比较
变频器驱动的电机类型及特点比较在工业自动化领域中,电机是最为常见且重要的设备之一。
而电机驱动系统中的变频器在控制电机速度和转矩方面起着至关重要的作用。
本文将对常用的变频器驱动的电机类型进行比较,分析它们的特点和适用场景。
一、感应电机(异步电机)感应电机是最常见的电机类型之一,其结构简单且成本较低。
在工业生产中,感应电机广泛应用于各种领域,包括风机、泵、压缩机、传送机械等。
在变频器驱动下,感应电机具有以下特点:1. 宽速调节范围:感应电机在变频器的调节下,可以实现较宽的速度调节范围,从低速到高速皆可满足需求。
2. 启动转矩大:感应电机在变频器驱动下,能够提供较大的启动转矩,适用于一些启动转矩较大的设备。
3. 效率较低:相比于其他电机类型,感应电机的效率较低。
当变频器处于低速调节状态时,效率下降较为明显。
二、永磁同步电机永磁同步电机利用永磁体的特性,具有优异的性能表现。
随着技术的发展,永磁同步电机在工业应用中得到了广泛的推广。
在变频器驱动下,永磁同步电机具有以下特点:1. 高效率:永磁同步电机的效率相比于感应电机更高,在变频器驱动下尤为明显。
能够降低能耗,提高整个系统的效率。
2. 高功率密度:永磁同步电机具有较高的功率密度,体积小、重量轻,适用于一些对体积要求较高的场景。
3. 高精度控制:永磁同步电机通过变频器驱动,可以实现精准的速度控制和转矩控制。
三、有刷直流电机有刷直流电机是一种传统的电机类型,其结构简单、稳定性较高,在一些特定场景中仍然得到广泛应用。
在变频器驱动下,有刷直流电机具有以下特点:1. 调速性能好:有刷直流电机在变频器控制下,可以实现很好的调速性能,且调速范围广。
2. 转矩波动小:相比于其他类型的电机,有刷直流电机的转矩波动相对较小,适用于对转矩要求较高的场景。
3. 维护成本低:有刷直流电机相比于其他类型的电机结构较为简单,故维护成本较低。
综上所述,不同类型的电机在变频器驱动下具备不同的特点和适用场景。
详解JDBC驱动的四种类型
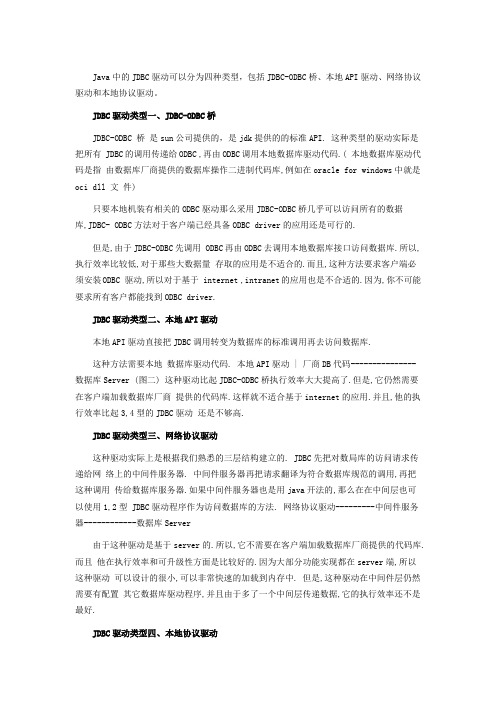
Java中的JDBC驱动可以分为四种类型,包括JDBC-ODBC桥、本地API驱动、网络协议驱动和本地协议驱动。
JDBC驱动类型一、JDBC-ODBC桥JDBC-ODBC 桥是sun公司提供的,是jdk提供的的标准API. 这种类型的驱动实际是把所有 JDBC的调用传递给ODBC ,再由ODBC调用本地数据库驱动代码.( 本地数据库驱动代码是指由数据库厂商提供的数据库操作二进制代码库,例如在oracle for windows中就是oci dll 文件)只要本地机装有相关的ODBC驱动那么采用JDBC-ODBC桥几乎可以访问所有的数据库,JDBC- ODBC方法对于客户端已经具备ODBC driver的应用还是可行的.但是,由于JDBC-ODBC先调用 ODBC再由ODBC去调用本地数据库接口访问数据库.所以,执行效率比较低,对于那些大数据量存取的应用是不适合的.而且,这种方法要求客户端必须安装ODBC 驱动,所以对于基于 internet ,intranet的应用也是不合适的.因为,你不可能要求所有客户都能找到ODBC driver.JDBC驱动类型二、本地API驱动本地API驱动直接把JDBC调用转变为数据库的标准调用再去访问数据库.这种方法需要本地数据库驱动代码. 本地API驱动 | 厂商DB代码---------------数据库Server (图二) 这种驱动比起JDBC-ODBC桥执行效率大大提高了.但是,它仍然需要在客户端加载数据库厂商提供的代码库.这样就不适合基于internet的应用.并且,他的执行效率比起3,4型的JDBC驱动还是不够高.JDBC驱动类型三、网络协议驱动这种驱动实际上是根据我们熟悉的三层结构建立的. JDBC先把对数局库的访问请求传递给网络上的中间件服务器. 中间件服务器再把请求翻译为符合数据库规范的调用,再把这种调用传给数据库服务器.如果中间件服务器也是用java开法的,那么在在中间层也可以使用1,2型 JDBC驱动程序作为访问数据库的方法. 网络协议驱动---------中间件服务器------------数据库Server由于这种驱动是基于server的.所以,它不需要在客户端加载数据库厂商提供的代码库.而且他在执行效率和可升级性方面是比较好的.因为大部分功能实现都在server端,所以这种驱动可以设计的很小,可以非常快速的加载到内存中. 但是,这种驱动在中间件层仍然需要有配置其它数据库驱动程序,并且由于多了一个中间层传递数据,它的执行效率还不是最好.JDBC驱动类型四、本地协议驱动这种驱动直接把JDBC调用转换为符合相关数据库系统规范的请求.由于4型驱动写的应用可以直接和数据库服务器通讯.这种类型的驱动完全由java实现,因此实现了平台独立性. 本地协议驱动---------数据库Server由于这种驱动不需要先把JDBC的调用传给ODBC或本地数据库接口或者是中间层服务器.所以它的执行效率是非常高的.而且,它根本不需要在客户端或服务器端装载任何的软件或驱动. 这种驱动程序可以动态的被下载.但是对于不同的数据库需要下载不同的驱动程序.以上对四种类型的JDBC驱动做了一个说明.那么它们适合那种类型的应用开发呢?JDBC-ODBC桥由于它的执行效率不高,更适合做为开发应用时的一种过度方案,或着对于初学者了解JDBC编程也较适用. 对于那些需要大数据量操作的应用程序则应该考虑2,3,4型驱动.在intranet方面的应用可以考虑2型驱动,但是由于3,4型驱动在执行效率上比2型驱动有着明显的优势,而且目前开发的趋势是使用纯java.所以3,4型驱动也可以作为考虑对象. 至于基于internet方面的应用就只有考虑3,4型驱动了. 因为3型驱动可以把多种数据库驱动都配置在中间层服务器.所以3型驱动最适合那种需要同时连接多个不同种类的数据库, 并且对并发连接要求高的应用. 4型驱动则适合那些连接单一数据库的工作组应用。
伺服驱动器的类型和基本特点
伺服驱动器的类型和基本特点伺服驱动器是电气控制系统中常用的一种设备,用于控制和驱动伺服电机。
它能够精确地控制伺服电机的位置、速度和加速度,广泛应用于自动化领域的各种设备和机器人。
1. 伺服驱动器的类型1.1 位置伺服驱动器位置伺服驱动器是最常见的一种类型。
它通过接收来自控制器的位置指令,驱动伺服电机精确地到达指定的位置。
它通常使用编码器来反馈电机的位置信息,以保证准确的位置控制。
1.2 速度伺服驱动器速度伺服驱动器主要用于控制伺服电机的转速。
它接收来自控制器的速度指令,通过调整电机的输出电压和电流来实现精确的速度控制。
速度伺服驱动器通常还配备速度反馈装置,如霍尔传感器或编码器,以提供准确的速度反馈信息。
1.3 扭矩伺服驱动器扭矩伺服驱动器主要用于控制伺服电机的输出扭矩。
它接收来自控制器的扭矩指令,通过调整电机的输出电压和电流来实现精确的扭矩控制。
扭矩伺服驱动器通常还配备扭矩传感器,以提供准确的扭矩反馈信息。
2. 伺服驱动器的基本特点2.1 高精度控制伺服驱动器能够实现高精度的位置、速度和扭矩控制,可满足精密运动控制的需求。
2.2 快速响应伺服驱动器具有快速响应的特点,能够迅速调整电机的输出,实现高速工作和动态变化的控制。
2.3 良好的稳定性伺服驱动器具有良好的稳定性,能够稳定地控制电机的运动,避免因负载变化而产生的运动误差。
2.4 多种控制模式伺服驱动器支持多种控制模式,如位置控制、速度控制、扭矩控制等,可根据不同应用需求选择合适的模式。
2.5 保护功能伺服驱动器通常具备多种保护功能,如过流保护、过载保护、短路保护等,可保护电机和驱动器免受损坏。
总结:伺服驱动器有多种类型,包括位置伺服驱动器、速度伺服驱动器和扭矩伺服驱动器。
它们具有高精度控制、快速响应、良好的稳定性、多种控制模式和保护功能等基本特点,适用于各种自动化设备和机器人的控制和驱动。
驱动的工作原理
驱动的工作原理
驱动是指将外部信号转化为机械运动的设备,在不同的领域和应用中有各种不同的工作原理。
下面将介绍几种常见的驱动工作原理。
1. 电动驱动原理:电动驱动是通过利用电能转化为机械能来驱动设备的一种方式。
它通常包括电源、电动机和传动系统三个部分。
电源提供电能,电动机将电能转化为旋转力矩,传动系统将旋转力矩传递给要驱动的设备。
2. 液压驱动原理:液压驱动是利用液体在控制系统中传递力和能量的原理来驱动设备。
它通常包括液压泵、液压阀和液压执行器等组件。
液压泵通过产生高压液体来提供动力,液压阀控制液体的流量和方向,液压执行器将液压能转化为机械运动。
3. 气动驱动原理:气动驱动是利用气体在控制系统中传递力和能量的原理来驱动设备。
它通常包括气源(如压缩空气)、气动阀和气动执行器等组件。
气源提供气体动力,气动阀控制气体的流量和方向,气动执行器将气动能转化为机械运动。
4. 步进驱动原理:步进驱动是指通过控制每个步进马达的定向和步进脉冲信号来实现精确的位置和速度控制。
步进马达通常由电磁绕组和转子组成,控制系统向电磁绕组提供脉冲信号,使转子按照固定的角度步进运动。
以上是几种常见的驱动工作原理,每种原理都有其适用的领域和特点,广泛应用于各种设备和系统中。
电动叉车技术参数
电动叉车技术参数电动叉车是一种使用电动机驱动的叉车,与传统的内燃机叉车相比,电动叉车具有无污染、低噪音、低振动、维护方便等优点。
下面将介绍电动叉车的一些关键技术参数。
1.驱动类型电动叉车的驱动类型主要有直流电驱动和交流电驱动两种。
直流电驱动的电动叉车相对简单,常用的电压为24V和48V,适用于低载荷、小型场地的操作。
交流电驱动的电动叉车功率更高,常用的电压为80V和48V,适用于长时间高强度使用的场合。
2.驱动电机电动叉车的驱动电机一般采用直流电机或交流电机。
直流电机结构简单、成本低,但效率相对较低。
交流电机具有高效率、高转矩和宽电压范围等优点,但成本较高。
同时,电动叉车的驱动电机还需要具备耐高温、高转矩、高效率和低噪音的特点。
3.动力电池电动叉车的动力电池主要由铅酸电池、镍氢电池和锂离子电池等组成。
铅酸电池成本较低,但能量密度低、循环寿命短。
镍氢电池具有较高的能量密度和循环寿命,但成本较高。
锂离子电池具有较高的能量密度、循环寿命长,但成本最高。
选择合适的动力电池需要根据工作需求和经济成本进行权衡。
4.重量和载重量电动叉车的重量主要包括车身重量、动力电池重量和货物重量等。
载重量是指电动叉车能够承载的最大货物重量。
重量和载重量的选择需要根据工作场景和工作需求进行确定,以保证电动叉车的稳定性和安全性。
5.提升高度提升高度是指电动叉车能够达到的货物的最大高度。
提升高度的选择需要根据仓储场地的实际情况和货物的堆码高度确定。
同时,还要考虑到电动叉车的稳定性和安全性。
6.速度和行驶距离电动叉车的速度和行驶距离是衡量其工作效率和适用范围的重要指标。
速度和行驶距离的选择需要根据具体的工作需求和工作环境来确定,以满足工作效率和作业时间的要求。
7.充电方式和时间电动叉车的充电方式主要有普通充电和快速充电两种。
普通充电时间较长,一般需要8-12小时,适用于充电时间充裕的场合。
快速充电时间较短,一般需要1-2小时,适用于充电时间紧迫的场合。
单片机常见端口驱动类型
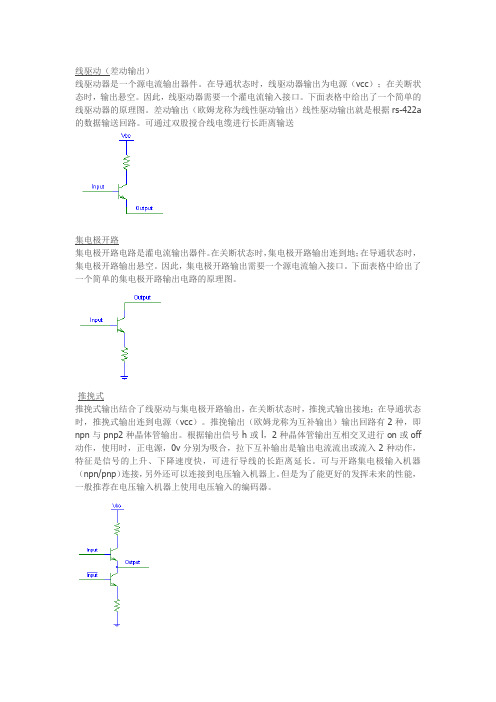
线驱动(差动输出)
线驱动器是一个源电流输出器件。
在导通状态时,线驱动器输出为电源(vcc);在关断状态时,输出悬空。
因此,线驱动器需要一个灌电流输入接口。
下面表格中给出了一个简单的线驱动器的原理图。
差动输出(欧姆龙称为线性驱动输出)线性驱动输出就是根据rs-422a 的数据输送回路。
可通过双股搅合线电缆进行长距离输送
集电极开路
集电极开路电路是灌电流输出器件。
在关断状态时,集电极开路输出连到地;在导通状态时,集电极开路输出悬空。
因此,集电极开路输出需要一个源电流输入接口。
下面表格中给出了一个简单的集电极开路输出电路的原理图。
推挽式
推挽式输出结合了线驱动与集电极开路输出,在关断状态时,推挽式输出接地;在导通状态时,推挽式输出连到电源(vcc)。
推挽输出(欧姆龙称为互补输出)输出回路有2种,即npn与pnp2种晶体管输出。
根据输出信号h或l,2种晶体管输出互相交叉进行on或off 动作,使用时,正电源,0v分别为吸合,拉下互补输出是输出电流流出或流入2种动作,特征是信号的上升、下降速度快,可进行导线的长距离延长。
可与开路集电极输入机器(npn/pnp)连接,另外还可以连接到电压输入机器上。
但是为了能更好的发挥未来的性能,一般推荐在电压输入机器上使用电压输入的编码器。
驱动类型介绍
HID (人机接口设备 ) USB Mass Storage (大容量存储设备 )
(设备连接、系统识别、系统与设备通讯)
2
涉及到的通讯协议
USB USB-HID USB Mass Storage
3
USB设备与驱动程序
USB设备连接方式
USB主控制器与其它I/O设备一样直接连接到系统总线上。操作系统与 主控制器通信使用I/O口或内存寄存器,通过普通的中断信号,系统 可以接受主控制器的事件通知。主控制器连接一棵USB设备树。一 种称为hub的设备作为其它设备的连接点。多个hub能以菊链方式连 接,可以连接到USB规范中定义的最大深度。
连接方式
与USB设备相同。
HID设备逻辑结构
人机接口设备(HID)主要是指一些人与计算机进行交互的设备,如键 盘、鼠标、游戏杆等;但是HID设备不一定非要是这些人机交互设备 ,只要符合HID设备级定义规范要求的都可以认为是HID设备。
当插入HID设备后,主机会向设备请求各种描述符来识别设备。为了 把一个设备识别为HID类别,设备在定义描述符的时候必须遵守HID 规范。下图显示了HID各种描述符之间的关系。
USB协议规定:配置、接口描述符
Configuration Descriptor: wTotalLength: 0x0029 bNumInterfaces: 0x01 bConfigurationValue: 0x01 iConfiguration: 0x00 bmAttributes: 0xC0 (Bus Powered Self Powered ) MaxPower: 0x96 (300 mA) Interface Descriptor: bInterfaceNumber: 0x00 bAlternateSetting: 0x00 bNumEndpoints: 0x02 bInterfaceClass: 0xFF bInterfaceSubClass: 0xA0 bInterfaceProtocol: 0xB0 iInterface: 0x00
驱动程序原理
驱动程序原理一、概述驱动程序是指一些特定的软件,它们可以与操作系统交互并控制硬件设备的工作。
驱动程序通常由硬件厂商或第三方开发人员编写,用于使计算机系统能够识别、控制和管理各种硬件设备。
本文将介绍驱动程序的原理及其工作流程。
二、驱动程序的分类根据不同的硬件设备类型,驱动程序可以分为多种类型,如下所示:1. 显卡驱动:用于控制显示器的输出和图形处理。
2. 网卡驱动:用于管理网络连接和数据传输。
3. 声卡驱动:用于控制音频输入和输出。
4. 打印机驱动:用于管理打印机的输出。
5. USB设备驱动:用于管理USB接口连接的外部设备。
三、驱动程序工作原理1. 驱动程序与操作系统交互当计算机启动时,操作系统会初始化并加载所有已安装的硬件设备。
此时,操作系统会调用与每个硬件设备相关联的驱动程序,并将其加载到内存中。
这样,操作系统就可以通过这些驱动程序来与硬件设备进行交互。
2. 驱动程序控制硬件设备驱动程序通过向硬件设备发送指令来控制其工作。
这些指令可以包括读取输入数据、发送输出数据以及控制硬件设备的状态等。
驱动程序还可以通过与硬件设备交互来获取有关其状态和性能的信息,例如温度、电压和频率等。
3. 驱动程序与应用程序交互应用程序可以通过操作系统提供的API(应用程序接口)来访问驱动程序,并向硬件设备发送指令。
驱动程序会将这些指令转换为硬件设备可识别的格式,并将其发送到硬件设备中执行。
当硬件设备返回数据时,驱动程序会将其转换为应用程序可识别的格式,并将其返回给应用程序。
4. 驱动程序更新和升级随着技术的不断发展,硬件设备也在不断更新和升级。
为了保证计算机系统能够正常地识别和使用新型硬件设备,驱动程序也需要不断更新和升级。
通常情况下,用户可以从厂商网站或操作系统官方网站下载最新版的驱动程序进行安装。
四、驱动程序编写流程1. 确定目标平台和操作系统版本首先,开发人员需要确定要开发的驱动程序所针对的目标平台和操作系统版本。
汽车驱动电机的类型及特点

汽车驱动电机的类型及特点
汽车驱动电机主要分为以下几种类型:
1. 直流电机:直流电机是最早被应用于汽车驱动电机的一种电机。
它具有结构简单、控制容易、启动扭矩大等特点,但它的效率低和维护成本高是它的缺点。
2. 永磁同步电机:永磁同步电机具有高效率、低能耗、高功率密度、响应速度快等优点,但是稳态性能受电机转速和工作温度的影响较大,同时价格相对较高。
3. 风冷异步电机:风冷异步电机是一种无需水冷却的电机,具有结构简单、维护成本低等优点,但是由于异步电机本身的劣势(启动扭矩较低),在需要大启动扭矩时会出现短暂的动力不足现象。
4. 永磁无刷直流电机:永磁无刷直流电机是一种新型的电机,具有响应速度快、高效率、高功率密度等优点,但是整体成本较高。
这些不同类型的电机各有优缺点,汽车制造商需要根据不同的车型、用途以及价格等因素进行选择。
步进驱动器有哪些类型
步进驱动器有哪些类型步进驱动器有哪些类型1、步进驱动器按结构形式分(1)单片微型计算机式。
(2)多芯片集成微处理器式。
(3)通用型嵌入式系统式。
(4)智能卡专用模块化设计式。
(5)PCB印刷电路板式。
(6)可编程逻辑器件阵列。
2、步进驱动器按应用场合分(1)工业控制用步进电机用于各种机械设备的定位与传动。
如机床主轴的转动或直线往复运动的输出;纺织机前纺轮的移动及卷绕动作的控制等。
(2)民用生活用小功率步距角电动机主要用于家庭照明灯具、电风扇、洗衣机等的电动机的调速和控制以及玩具遥控装置中起放大作用的小马达等。
3、步进驱动器按工作电源分类可分为直流式和交流式两类。
步进驱体的特性1、步进驱动器转速精度高在额定负载下,其转矩脉动小于1%/°F.UINR.T.,而一般伺服系统的误差为5%10%。
2、步进驱动器响应速度快由于无需要数位脉冲输入时序控制器,因此具有快速反应能力,能实现高速定位与控制功能。
3、运行平稳采用永磁同步技术后,运转更加平滑安静且噪音极低。
同时由于其内部没有位置环调整机构故不存在间隙磨损现象,因而寿命更长。
另外它还具有很好的温度稳定性及抗干扰性能。
4、可靠性好因不需要任何附加设备,即插即用,维护简单方便。
5、体积小重量轻6、安装容易快捷7、价格低廉8、适用性强步进驱动器和普通伺服的区别1、工作原理不一样普通的伺服放大器是通过改变电压的大小来调节电流大小从而影响速度的快慢,通过检测信号来判断出当前是否处于好的工作状态。
而步进的原理是通电的时候会产生一个磁场带动转子旋转,当断电之后会逐渐消失掉这个磁性。
2、参数设置不同一般的伺服器可以设置的参数有很多,比如分辨率等等都是可以进行选择的!但是步进却只能够进行频率的设置。
3、使用范围不同因为使用的目的不一样所以选择的产品也不一样了,对于一些要求比较高的人来说可以选择比较一些的伺服产品,但是对于那些只需要简单的操作来说就可以直接的选择步进了!步进驱动的优点1、成本低相比其他类型的传感器而言成本更低,而且使用寿命也更长一点,当然这主要取决于它的材质问题,如果是塑料外壳的话那么相对来说会比较耐用些。
伺服驱动器的作用及其类型
伺服驱动器的作用及其类型伺服驱动器(Servo Drive)是一种将电力信号转化为机械运动的控制器。
它可以实现对电机的精确控制,从而将所需的力或速度精确地输入到被控对象上。
伺服驱动器在工业生产中有着广泛的应用,本文将介绍伺服驱动器的作用及其常见的类型。
一、伺服驱动器的作用伺服驱动器的主要作用是控制伺服电机的转速和转向,从而实现对被控对象的控制。
换句话说,伺服驱动器可以将电子信号转化为精確的机械运动。
具体来说,伺服驱动器可以帮助控制电机的加速度、速度、减速度,反馈位置和转速等参数。
由于伺服驱动器的高精度控制,其应用非常广泛。
在工业生产中,伺服驱动器被广泛应用于自动化生产线、高精度机床等场合。
同时,伺服驱动器还可以应用于飞行器、机器人、半导体设备等领域。
二、伺服驱动器的类型常见的伺服驱动器类型有位置式伺服驱动器、速度式伺服驱动器和扭矩式伺服驱动器。
1. 位置式伺服驱动器位置式伺服驱动器是根据所需的位置进行控制的一种驱动器。
它通过对伺服电机的控制实现对被控对象的定位、回归和调整。
在应用中,通常需要使用编码器作为反馈元件来实现对位置的控制。
2. 速度式伺服驱动器速度式伺服驱动器是根据所需的速度进行控制的一种驱动器。
它通过对伺服电机的控制实现对被控对象的速度控制,以避免过快或过慢的情况。
在应用中,通常需要使用轴承或其他机械元件来实现对速度的控制。
3. 扭矩式伺服驱动器扭矩式伺服驱动器是根据所需的扭矩进行控制的一种驱动器。
它通过对伺服电机的控制实现对被控对象的扭矩控制,进而实现对所需的力的控制。
在应用中,通常需要使用扭矩传感器等元件来实现对扭矩的控制。
总之,伺服驱动器在工业生产中发挥着巨大的作用。
不同类型的伺服驱动器可以应用于不同的场合,并为生产过程提供了精确控制,提高了生产效率和质量。
驱动机的类型
驱动机的类型2.1 驱动机应具备的技术条件2.1.1驱动机的组成驱动机主要由交流电动机,主减速器,制动器,限速器,防逆运转器及机架组成。
电动机和主减速器通过同轴线止扣用螺栓固联在一起。
电动机轴和主减速器的高速主动轴为一体;制动器放在高速轴上,以获得较小的制动力矩;防逆运转器放置在低速从动轴上,接通电源,制动器打开,电动机运转将功率输入给主传动机构,通过主传动机构的从动轴将功率传人链机构,带动梯级和扶手带运行工作。
切断电源时,制动器通过弹簧由包闸臂包紧包闸轮,产生摩擦力矩,使主轴减速停车。
当电动机超速时,限速器切断电源,制动器工作,扶梯随之停车,同样逆运转时亦可体车。
整个驱动机固联在机架上。
2.1.2 驱动机的技术要求(1)具有较高的强度即在设计驱动机时,应首先满足在设计寿命内,不产生任何失效形式的强度要求。
(2)具有较高的传动效率传动效率体现了输入功率在驱动机中有效利用的程度。
在输入功率相同的情况下,克服生产阻力矩的大小直接影响驱动机传动效率的高低,也反映了能量损耗的多少。
(3)具有较高的体积载荷体积载荷是指驱动机传递的功率除以驱动机体积所得的商。
即要求驱动机所占的空间较小,在扶梯运载量不变的条件下,驱动机必须具有小体积,大功率的特性。
(4)要满足扶梯的要求即驱动机须较大的减速比,恒定的运动速度(慢速v=0。
5m/s),及满足连续,起动次数较少的正反运动。
且正反运转具有相同的工作特性。
(5)具有较低的噪声和振动为了达到人乘舒适,减少噪声对公共场所的污染,扶梯应具有噪声低,振动小,工作运行平稳的特性。
(6)应具有合理的结构设计主要评定条件是:满足强度和刚度的要求;外观朴实大方;制造与安装工艺好;装拆方便;成本低廉。
(7)具有灵活,可靠的制动性能驱动机附设的制动器是为了缩短停车时间,加速停车。
其制动力矩应大于轴的输入转矩。
制动技术应先进,强度高,寿命长,灵活可靠,机构紧凑。
(8)限速器和防逆运转器要灵活可靠2.2 驱动机主传动机构的选用2.2.1 主传动机构的的选择原则和依据驱动机主传动机构选择的原则是:1.梯及驱动机的工况条件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
特点
USB底层驱动程序由操作系统提供,负责与实际的硬件打交道,实 现烦琐的底层通信。 USB功能驱动程序由设备开发者编写,不对实际的硬件进行操作, 而是通过向USB底层驱动程序发送包含URB(USB Request Block ,请求块)的IRP,来实现对USB设备信息的发送和接收。 多个USB设备可以通过USB底层驱动程序来协调它们的工作。 编写分层驱动程序较之编写单一驱动程序相对简单,且可以节省内 存和资源,不易出错。
HID类设备的特殊信息是在接口描述符的类别码,子类别码和 协议码中声明的。
HID协议
USB协议定义了11种请求命令,通过这些请求来获得设备的信息及对设备 进行设置。HID类设备除了要支持这11种标准的请求外,还要实现以下6种 特定请求: ① Get_Report——主机用控制传输从设备接收数据,所有HID类设备都要 支持这个请求; ② Set_Report——设备用控制传输接收主机的数据,设备可以不支持此请 求; ③ Get_Idle——主机读取设备当前的空闲速率,设备可以不支持此请求;
USBKey产品相关的驱动类型
驱动类型介绍
驱动类型划分
USB (通用)
HID (人机接口设备 ) USB Mass Storage (大容量存储设备 )
(设备连接、系统识别、系统与设备通讯)
2
涉及到的通讯协议
USB USB-HID USB Mass Storage
3
USB设备与驱动程序
USB设备内部逻辑结构
USB协议规定:设备描述符
Device Descriptor: bcdUSB: 0x0110 bDeviceClass: 0x00 bDeviceSubClass: 0x00 bDeviceProtocol: 0x00 bMaxPacketSize0: 0x08 (8) idVendor: 0x155B idProduct: 0x8003 bcdDevice: 0x1202 iManufacturer: 0x00 iProduct: 0x00 iSerialNumber: 0x00 bNumConfigurations: 0x01
USB设备接口
USB设备的接口可以有若干个端点(endpiont),端点作为通信管道的 终点,有四种类型:批量(Bulk),控制(Contro1),中断(Interrupt)和 同步(Isochronous)。这些类型都需要在驱动程序中进行描述。USB 设备的端点0默认为控制方式,可以初始化系统,设备并加电并收到 一个总线复位命令后,端点0就可以访问。与端点类型对应的是定义 了四种数据传输方式,根据开发系统也对其在驱动程序中进行定义 ,具体包括: 控制方式:用于发送和接收USB定义的结构化信息; 批量方式:用于发送或接收小块无结构数据; 中断方式:与批量管道相似,但包括一个最大延迟; 同步方式:用于发送或接收有周期保证的大块无数据结构。
HID描述符
HID Descriptor: bcdHID: 0x0110 bCountryCode: 0x00 bNumDescriptors: 0x01 bDescriptorType: 0x22 wDescriptorLength: 0x0028 Interface Descriptor: bInterfaceNumber: 0x00 bAlternateSetting: 0x00 bNumEndpoints: 0x02 bInterfaceClass: 0x03 (HID) bInterfaceSubClass: 0x00 bInterfaceProtocol: 0x00 iInterface: 0x00
④ Set_Idle——设置闲置状态,设备可不支持此请求;
⑤ Get_Protocol——主机获得设备的当前活动是引导协议还是报告协议; ⑥ Set_Protocol——在引导协议和报告协议间切换,设备如果支持系统引 导(如键盘和鼠标),就必须支持Get_Protocol和Set_Protocol请求。
USB协议规定:端点描述符
Endpoint Descriptor: bEndpointAddress: 0x81 IN Transfer Type: Interrupt wMaxPacketSize: 0x0040 (64) bInterval: 0x01
Endpoint Descriptor: bEndpointAddress: 0x02 OUT Transfer Type: Interrupt wMaxPacketSize: 0x0040 (64) bInterval: 0x01
USB协议规定:配置、接口描述符
Configuration Descriptor: wTotalLength: 0x0029 bNumInterfaces: 0x01 bConfigurationValue: 0x01 iConfiguration: 0x00 bmAttributes: 0xC0 (Bus Powered Self Powered ) MaxPower: 0x96 (300 mA) Interface Descriptor: bInterfaceNumber: 0x00 bAlternateSetting: 0x00 bNumEndpoints: 0x02 bInterfaceClass: 0xFF bInterfaceSubClass: 0xA0 bInterfaceProtocol: 0xB0 iInterface: 0x00
USB设备枚举
主机对usb设备的识别过程叫做枚举。 为什么要枚举呢?枚举就是从设备读取一些信息,知道设备是什么样的设备, 如何进行通信,这样主机就可以根据这些信息来加载合适的驱动程序。 一个完整的windows对usb设备的枚举过程如下: 设备连接。USB设备经USB总线连接主机。 设备上电。USB设备可以自供电,也可以使用USB总线供电。 主机检测到设备,发出复位。主机通过检测设备在总线的上拉电阻检测到有 新的设备连接,并获释设备是全速设备还是低速设备,然后向该端口发送一 个复位信号。 设备默认状态。设备从总线上接收到一个复位信号后,才可以对总线的处理 操作做出响应。设备接收到复位信号后,就暂时使用默认地址(00H)来响应 主机的命令。
USB设备连接方式
USB主控制器与其它I/O设备一样直接连接到系统总线上。操作系统与 主控制器通信使用I/O口或内存寄存器,通过普通的中断信号,系统 可以接受主控制器的事件通知。主控制器连接一棵USB设备树。一 种称为hub的设备作为其它设备的连接点。多个hub能以菊链方式连 接,可以连接到USB规范中定义的最大深度。
USB设备枚举(续)
地址分配。当主机接收到有设备对默认地址(00H)响应的时候,就分配给设 备一个空闲的地址,以后设备就只对该地址进行响应。 读取USB设备描述符。主机读取USB设备描述符,确认USB设备的属性。 设备配置。主机依照读取的USB设备描述符来进行配置,如果设备所需的 USB资源得以满足,就发送配置命令给USB设备,表示配置完毕。 挂起。如果使用总线供电,为了节省电源,当总线保持空闲状态超过3ms以 后,设备驱动程序就会进入挂起状态,在挂起状态时,USB设备保留了包 括其地址和配置信息在内的所有内部状态,设备的消耗电流不超过500uA。 从用户角度来看,枚举过程是自动完成并不可见的。但很多初次使用的设 备连接时,系统会弹出说新硬件检测到,设备安装成功,可以使用之类的 消息提示框,而且有时还需要用户配合选择安装相关的驱动。 当枚举完成后,这个新添加的设备可在Windows的设备管理器里面看到, 当用户删除这个设备/硬件时,系统把这个设备从设备管理器里删除。
HID设备接口要求
交换的数据储存在称为报表的结构内,设备的固件程序必须支持HID 报表的格式。报表的格式很灵活,可以处理任何类型的数据,单个 报表最多包含255B。 每一笔事务可以携带小量或中量的数据。低速、全速、高速设备每 一笔事务最大分别是8B、6 4B、1 024B。 最大传输速度受到限制,低速设备的中断端点每1Oms一笔事务,即 800b/s;全速设备的中断端点每lms一笔事务,即64 O00b/s;高 速设备的中断端点每125tts三笔事务,即24.576Mb/s。 ④HID设备必须包含一个类描述符和一个或几个报表描述符。通过报 表描述符定义了数据格式和使用方法。
Windows系统下USB驱动协议栈
分为USB底层(总线)驱动程序 和USB功能(设备)驱动程序。
总体数据传输过程
一个完整的USB系统包括主机系统和USB设备。所有的传输事务都是由主机 发起的。一个主机系统又可以分为以下几个层次结构,如图所示:
具体数据传输过程
当应用程序想对USB设备进行I/O操作,它需调用Windows API函数 ,I/O管理器将此请求构造成一个合适的I/O请求包(IRP)并把它传 递给USB功能驱动程序。 USB功能驱动程序接收到这个IRP后,根据IPR中包含的具体操作代 码构造相应USB请求块(URB),并把此URB放到一个新的IRP中 ,然后把它传递给USB底层驱动程序。 USB底层驱动程序根据IRP中所含的URB执行相应的操作,并把操 作的结果返回给USB功能驱动程序。USB功能驱动程序接收到此返 回的IRP后,将操作结果通过IRP返还给I/O管理器,最后I/O管理器 将此IRP操作结果传回给应用程序,至此应用程序对设备的一次I/O 操作完成。
USB相关资料
/ (usb实施者论坛 提供各种usb协议) /usb.htm /
HID设备与驱动程序
为什么使用HID设备
外部设备与计算机通讯需要驱动程序,USB协议复杂,不方便。 把设备定义为属于HID类,应用程序通过与系统内置的HID类驱动通 信。实现与设备通信功能。 即使设备不完全符合HID使用表中的任何一种,也可以完全根据需要 自己定义一个使用表,从而符合HID类驱动程序的要求。