机械工程控制基础课后答案(华科版)
机械控制工程课后习题解答
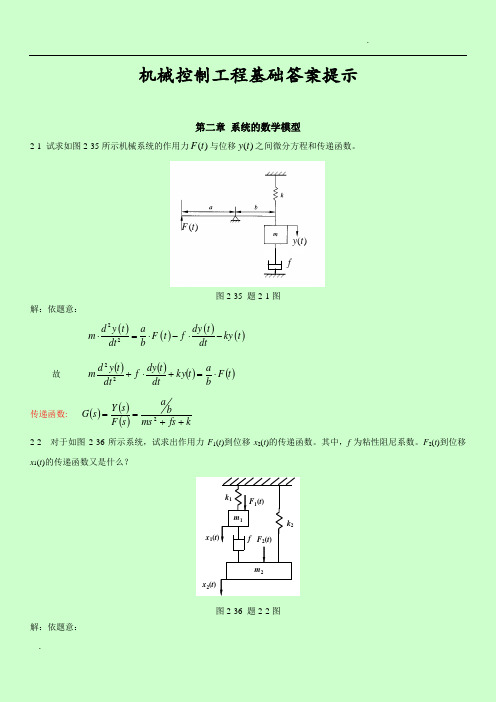
机械控制工程基础答案提示第二章 系统的数学模型2-1 试求如图2-35所示机械系统的作用力)(t F 与位移)(t y 之间微分方程和传递函数。
)(t F )(t y f图2-35 题2-1图解:依题意:()()()()22d y t dy t a m F t f ky t dt b dt⋅=⋅-⋅- 故 ()()()()t F b at ky dt t dy f dt t y d m⋅=+⋅+22 传递函数: ()()()kfs ms b as F s Y s G ++==22-2 对于如图2-36所示系统,试求出作用力F 1(t )到位移x 2(t )的传递函数。
其中,f 为粘性阻尼系数。
F 2(t )到位移x 1(t )的传递函数又是什么?m 2m 1k 1 f k 2F 1(t )F 2(t ) x 2(t )x 1(t )图2-36 题2-2图解:依题意:对1m : ()()()()212121111dt t x d m dt t dx dtt dx f t x k F =⎥⎦⎤⎢⎣⎡--- 对两边拉氏变换:()()()[]()s X s m s sX s sX f x k s F 12121111=--- ①对2m : ()()()()()222222212dt t x d m t x k dt t dx dt t dx f t F =-⎥⎦⎤⎢⎣⎡-+ 对两边拉氏变换:()()()[]()()s X s m s x k s sx s sx f s F 22222212=--+ ②故: ()()()()()()()()⎩⎨⎧=+++-=-++S F s x k fs s m s fsx s F s fsx s x k fs s m 222221121121 故得:()()()()()()()()()()()()()()⎪⎪⎩⎪⎪⎨⎧-+++++++=-+++++++⋅=22221212212122222121222211fs k fs s m k fs s m k fs s m s F s fsF s x fs k fs s m k fs s m s fsF k fs s m s F s x 故求()t F 1到()t x 2的传递函数 令:()02=s F()()()()()()()()()2122211122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++求()t F 2到()t x 1的传递函数 令:()01=s F()()()()()()()()()1122221122432121212211212x s fsG s F s m s fs k m s fs k fs fsm m s f m m s m k m k s f k k s k k ==++++-=+++++++2-3 试求图2-37所示无源网络传递函数。
机械工程控制基础(第四版)杨叔子华中科技大学课后习题答案
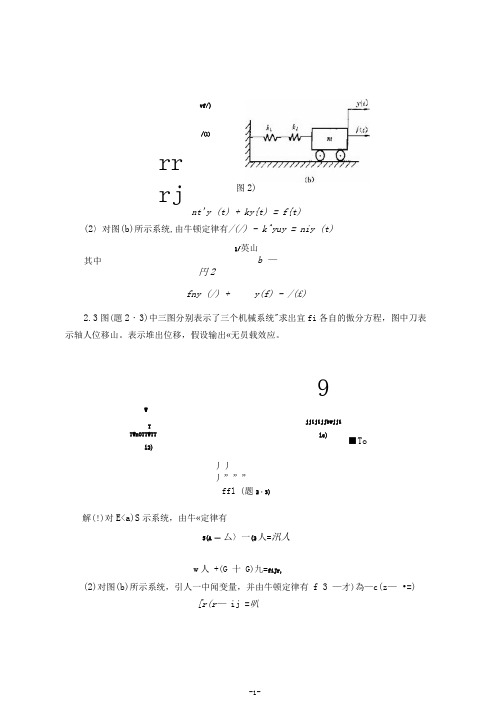
图2)nt'y (t) + ky{t) = f{t)(2〉对图(b)所示系统,由牛顿定律有/(/) - k^yuy = niy (t)1/英山b —円2 fny (/) +y(f) - /(£)2.3图(題2・3)中三图分别表示了三个机械系统"求岀宜fi 各自的傲分方程,图中刀表示轴人位移山。
表示堆出位移,假设输出«无员载效应。
ffl (题2・3) 解(!)对E<a)S 示系统,由牛«定律有5(A — 厶〉一(2人=汛人w 人 +(G 十 G)九=fiJr,(2)对图(b)所示系统,引人一中闻变量,并由牛顿定律有 f 3 —才)為—c(z — •=)[r(r — ij =叭vf/)/⑴rrrj其中W TTWnOTTWTTl2)丿丿丿”””丿丿切 9jjijijjbwjjile)■To消除中间变抢fl"人-T 1〕上& *知4儿=(3)0W所示系统,山牛顿定律有<6—竝)-上匕广矢)-耘心即uh 卜很rM?〉」:、=£d*/:]r2・4求出图(题2・仍所示电网络的馥分方程•Ri GG 二«nfT(b)剧(题2・4)解(】)对®(a)所示系统.设"为黴过&的电流』为恵电K,则有覘=曲+ +!I ”1—%=消除中间变量Jf化简有「-•丄门.血,(、「 15坨叫 +(1 + 矿'*■ 7^丿% *不p%/V| (-•',V£/\|二C]&“i + 命 + 学应± p^a,代1 (: 1,決1(2)对图(b)所示系统,设£为电流,則有涓除中间变董,井化饒有{R T R?)% +(7r-t-p)Kc=i?cW,-Hp-u, tq L 2 (丿22.5求图(题2.5)所示机械系统的微分方程。
图中M为箱入转拒,G为0周S尼J为转动«lc解设系统絵入为肘(即輸出为必郎加)),分别对画盘和质块进行动力学分析,列写动力学方g如下:图(6 2.5)f — X)= mi r C3涓除中间变即可得到系统动力学方s加严 + (mC… + 山)0 +〔用加 + C M * 畑 + cjb=wM+ O V T KMZ6已知系统的动力学方程如下,试写出它们的传递函数y(5)//e(s),(a)> + 15$+ 60y+ 5Q0y = r + Zr(b)5>-r 25,= fl. 5r(i)J+255^W0. 5尸■(d) y+ 3)+ 6y + 4 据上=4r解根据传递瓯数的定文,求系统的传递函数,只需烙其动力学方程两边分别$零初始条件下进行拉氏变换•然后求yG”RG)。
《机械工程控制基础》课后题答案解析

机械工程控制基础目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛实际的炉水温度比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
《机械工程控制基础》课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
《机械工程控制基础》课后答案.pdf
第二节 拉普拉斯变换
第三节 拉普拉斯变换的基本定理
第四节 拉普拉斯逆变换
第四章 传递函数
第一节 传递函数的概念与性质
第二节 线性控制系统的典型环节
第三节 系统框图及其运算
第四节 多变量系统的传递函数
第五章 时间响应分析
第一节 概述
第二节 单位脉冲输入的时间响应
第三节 单位阶跃输入的时间响应
第四节 高阶系统时间响应
X(t)=0
其它
X(t)
一 AT
0
t
图8
脉冲函数的强度为 A,即图形面积。 单位脉冲函数(δ 函数)定义为 δ(t)= d 1(t)
dt
性质有: δ(t)=0 t≠0
δ(t)=∞ t=0
且
(t)dt = 1
−
5
X(t)
δ(t)
0
t
图9
强度为 A 的脉冲函数 x(t)也可写为 x(
t)=Aδ(t) 必须指出,脉冲函数 δ(t)在现实中是不存在的,它只有数学上的意
第六章
频率响应分析
第一节 谐和输入系统的定态响应
第二节 频率特性极坐标图
第三节 频率特性的对数坐标图
第四节 由频率特性的实验曲线求系统传递函数
第七章
控制系统的稳定性
第一节 稳定性概念
第二节 劳斯判据
第三节 乃奎斯特判据
第四节 对数坐标图的稳定性判据
第八章
控制系统的偏差
第一节 控制系统的偏差概念
1
第二节 输入引起的定态偏差 第三节 输入引起的动态偏差 第九章 控制系统的设计和校正 第一节 综述 第二节 希望对数幅频特性曲线的绘制 第三节 校正方法与校正环节 第四节 控制系统的增益调整 第五节 控制系统的串联校正 第六节 控制系统的局部反馈校正 第七节 控制系统的顺馈校正
《机械工程控制基础》课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
比较图2例2.图示为液面高度控制系统原理图。
试画出控制系统方块图和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正,可保持液面高度稳定。
机械工程控制基础课后答案
目录第一章自动控制系统的基本原理第一节控制系统的工作原理和基本要求第二节控制系统的基本类型第三节典型控制信号第四节控制理论的内容和方法第二章控制系统的数学模型第一节机械系统的数学模型第二节液压系统的数学模型第三节电气系统的数学模型第四节线性控制系统的卷积关系式第三章拉氏变换第一节傅氏变换第二节拉普拉斯变换第三节拉普拉斯变换的基本定理第四节拉普拉斯逆变换第四章传递函数第一节传递函数的概念与性质第二节线性控制系统的典型环节第三节系统框图及其运算第四节多变量系统的传递函数第五章时间响应分析第一节概述第二节单位脉冲输入的时间响应第三节单位阶跃输入的时间响应第四节高阶系统时间响应第六章频率响应分析第一节谐和输入系统的定态响应第二节频率特性极坐标图第三节频率特性的对数坐标图第四节由频率特性的实验曲线求系统传递函数第七章控制系统的稳定性第一节稳定性概念第二节劳斯判据第三节乃奎斯特判据第四节对数坐标图的稳定性判据第八章控制系统的偏差第一节控制系统的偏差概念第二节输入引起的定态偏差第三节输入引起的动态偏差第九章控制系统的设计和校正第一节综述第二节希望对数幅频特性曲线的绘制第三节校正方法与校正环节第四节控制系统的增益调整第五节控制系统的串联校正第六节控制系统的局部反馈校正第七节控制系统的顺馈校正第一章自动控制系统的基本原理定义:在没有人的直接参与下,利用控制器使控制对象的某一物理量准确地按照预期的规律运行。
第一节控制系统的工作原理和基本要求一、控制系统举例与结构方框图例1.一个人工控制的恒温箱,希望的炉水温度为100C°,利用表示函数功能的方块、信号线,画出结构方块图。
图1人通过眼睛观察温度计来获得炉内实际温度,通过大脑分析、比较,利用手和锹上煤炭助燃。
煤炭给定的温度100 C手和锹眼睛比较图2例2. 图示为液面高度控制系统原理图。
试画出控制系统方块图 和相应的人工操纵的液面控制系统方块图。
解:浮子作为液面高度的反馈物,自动控制器通过比较实际的液面高度与希望的液面高度,调解气动阀门的开合度,对误差进行修正, 可保持液面高度稳定。
机械控制工程基础课后答案
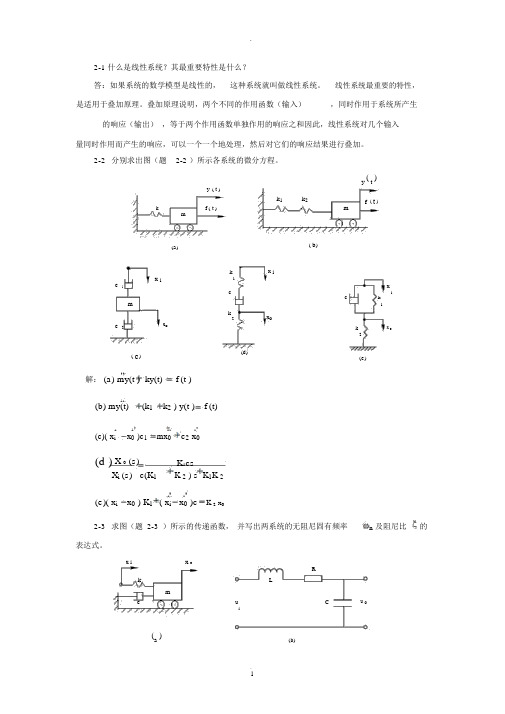
2-1 什么是线性系统?其最重要特性是什么?答:如果系统的数学模型是线性的,这种系统就叫做线性系统。
线性系统最重要的特性,是适用于叠加原理。
叠加原理说明,两个不同的作用函数(输入),同时作用于系统所产生的响应(输出),等于两个作用函数单独作用的响应之和因此,线性系统对几个输入量同时作用而产生的响应,可以一个一个地处理,然后对它们的响应结果进行叠加。
2-2分别求出图(题2-2 )所示各系统的微分方程。
y ( t )y( t )kk1k2f( t )f ( t )mm(a)(b)k x icx i11xcc i mk1kx o2c2x o k x o2( c)(d)(e)解: (a) my(t ) ky(t) f (t )(b) my(t) (k1k2 ) y(t ) f (t)(c)( x i x0 )c1 mx0c2 x0(d ) X 0 (s)K1csX i (s) c(K1K 2 ) s K1K 2(e)( x i x0 ) K1( x i x0 )c K 2 x02-3求图(题2-3)所示的传递函数,并写出两系统的无阻尼固有频率n 及阻尼比的表达式。
x i x oRk Lmc u C u oi( a )(b)。
解:图 (a) 有: G( s)k mns 2c s km m V i L iR i1 idtC图 (b) 有:1V 0 idt Ck Cm2 mk11R C ∴ G( s)LCR1n2 L2 LCssLCL2-4 求图(题 2-4 )所示机械系统的传递函数。
图中M 为输入转矩, C m 为圆周阻尼,J 为转动惯量。
(应注意消去 , 及)xkcMmRJ , C m题 2-4解:由已知可知输入量M 与输出量之间的关系为:JC m kM经拉氏变换后为:Js 2( ) C m s ( ) k( )ss M s( s)11/ J2 ∴nG( s)C m s kC mk s 2 2 nn 2M (s) Js2s2 sJ J其中,nk C m J2 Jk2-5 已知滑阀节流口流量方程式为Q c x ( 2p / ) ,式中,Q 为通过节流阀流口v的流量; p 为节流阀流口的前后油压差;x v 为节流阀的位移量; c 为流量系数;为节流口面积梯度;为油密度。