北斗信号模拟器实用方法
喷泉公司北斗GPS信号模拟器使用介绍
北斗GPS信号模拟器使用介绍InBufferSize和OutBufferSize 特点指定了为接纳和发送缓冲区分配的内存数量。
这两个值设置得越大,应用程序中可用的内存就越少。
但是,若是缓冲区太小,就要冒缓冲区溢出的危险,除非选用握手信号。
因为如今大多数计算机有更多的可用内存资源,缓冲区内存分配已不那么至关紧要了。
换言之,能够把缓冲区的值设得高一些而不影呼应用程序的功用。
14.Handshaking特点语法-MSComm1.Handshaking[=Value]。
∙效果-设置或回来硬件握手协议。
指的是PC与MODEM之间为了操控流速而约好的内部协议。
Value 值如下。
∙“0”-comNone没有握手协议,不思考流量操控。
“1”-comXOn/XOff,即在数据流中嵌入操控符来进行流量操控。
“2”-comRTS,即由信号线RTS主动进行流量操控。
“5”-comRTSXOnXOff,两者皆可。
GPS接收机可接收到可用于授时的准确至纳秒级的时间信息;用于预报未来几个月内卫星所处概略位置的预报星历;用于计算定位时所需卫星坐标的广播星历,精度为几米至几十米(各个卫星不同,随时变化);以及GPS系统信息,如卫星状况等。
GPS接收机对码的量测就可得到卫星到接收机的距离,由于含有接收机卫星钟的误差及大气传播误差,故称为伪距。
对0A码测得的伪距称为UA码伪距,精度约为20米左右,对P码测得的伪距称为P码伪距,精度约为2米左右。
GPS接收机对收到的卫星信号,进行解码或采用其它技术,将调制在载波上的信息去掉后,就可以恢复载波。
严格而言,载波相位应被称为载波拍频相位,它是收到的受多普勒频移影响的卫星信号载波相位与接收机本机振荡产生信号相位之差。
一般在接收机钟确定的历元时刻量测,保持对卫星信号的跟踪,就可记录下相位的变化值,但开始观测时的接收机和卫星振荡器的相位初值是不知道的,起始历元的相位整数也是不知道的,即整周模糊度,只能在数据处理中作为参数解算。
gps卫星信号模拟器如何模拟gps信号

gps卫星信号模拟器如何模拟gps信号SYN5203型GPS模拟器能够精确、无误的模拟出GPS卫星导航授时信息,通过自身可发出定位授时信息,支持实时星历和外部星历参数输入,能满足各类GPS导航仪终端的测试需求。
gps信号发生器可模拟卫星颗数为16颗,正常一般是10-12颗。
GPS信号模拟器输出的是真实的GPS信号,接收机接收的所有语句都能输出,在应用中接收机是分辨不出来我们的信号和真实信号的。
主要有静态(定点)轨迹制作、动态轨迹制作、轨迹信号发送和实时轨迹录制4大功能。
其中实时轨迹录制就是在需要后期模拟的轨迹的地方实地录制一圈,也可以理解为录制和回放的过程。
经过认真分析得出,gps信号发生器的录制功能如下:实现页面的地图功能,包括简单的地图缩放、平移、拖拽、2D/3D地图切换,卫星地图标记;实现范围内某一位置的标记及查询。
实现公交乘车导航,输入起始点位置,在显示器上面实现导航线路,显示换乘方案;实现某一线路查询功能,输入某一线路,查询这一条线路的站点信息和车辆等待和堵塞及来往信息,显示车辆的线路运行轨迹;查询某辆公交车GPS数据信息,显示车辆的状态及动态轨迹;实现查询某辆公交车的当前位置信息,在地图上显示出来;实现查询某部车辆的运行轨迹,输入车牌号,在地图上动态的显示车辆的某一时间段内的运行轨迹。
SYN5203型gps信号发生器技术指标中指出覆盖范围为方圆1万平米,半径100米之内。
可以连接他发出的范围里面的所有gps接收机。
假如您需要缩小模拟的GPS信号辐射范围,防止信号强度过大干扰到周边其它工作的设备,建议直连,直连后信号比较弱另外可加配信号衰减器连接在模拟器输出接口上。
该款卫星模拟器信内置温补晶振可以外接恒温晶振,当内置温补晶振时信号精度的定位精度≤5米,外接恒温晶振时定位精度≤1米,信号精度的速度精度≤0.1m/s。
轨迹录制时需要外接SMA接口的车载天线,定位精度是2.5米CEP,速度精度0.1m/s。
北斗调试软件 使用说明书
北斗调试软件使用说明书目录1引言 (3)2连接设备 (3)2.1串口连接 (3)2.2网口连接(配置指挥机) (3)2.2.1UDP (4)2.2.2TCP (4)3设备信息 (4)3.1设备发信准备 (4)3.2发信(北斗通信) (5)3.3关闭RNSS定位 (6)3.3.1隐藏RNSS输出(非关闭) (6)3.3.2关闭RNSS输出(永久关闭,发指令) (7)4RNSS (8)5透传调试 (8)1引言本文档是磐钴科技有限公司的测试软件——北斗三号短报文RDSS测试软件使用说明,旨在引导用户通过测试软件连接、通信、调试北斗终端设备的使用说明2连接设备2.1串口连接设备通过串口线连接到电脑,打测试软件,点击软件左上角【设备未连接】,打开设备连接窗口,设置连接方式、串口号、波特率(注:连接方式——串口,串口号——设备连接后串口号,波特率——默认115200,根据实际波特率选择),完成选择后点击【打开】,完成设备串口连接。
【串口连接】截图2.2网口连接(配置指挥机)指挥机与电脑插上网线,打开《指挥机网络配置》软件,选择端口号后打开串口(查看IP):点击<网络参数配置>——【读取参数】按钮,查看当前指挥机的IP信息(配置IP):勾选<网络配置项更改>中需要修改的选项,修改下方信息,点击【配置参数】按钮完成指挥机信息配置,确保指挥机与电脑在同一网段2.2.1UDP打开测试软件,点击上方的【设备未连接】,弹出设备连接设置窗口,选择连接方式、传输协议、使用端、本机IP、本机端口(注:连接方式——网口、传输协议——UDP、使用端——本机作为服务端、本机IP——刚才配置的指挥机UDP的远程IP地址和端口)<UDP配置>截图<连接>截图2.2.2TCP打开测试软件,点击上方的【设备未连接】,弹出设备连接设置窗口,选择连接方式、传输协议、使用端、本机IP、本机端口(注:连接方式——网口、传输协议——TCP、使用端——本机作为服务端、本机IP——刚才配置的指挥机TCP的远程IP地址和端口)<TCP配置>截图<连接>截图3设备信息3.1设备发信准备查询之前,把北斗设备放置开阔地,并将设备朝南摆放,远方无遮挡。
北斗信号模拟器简介
北斗信号模拟器简介1.1外观按键介绍1:红色按键为电源开关;2:两个圆形旋钮为信号衰减旋钮,分别提供10dB和1dB步进量的衰减,最大衰减100dB;3:液晶显示提供模拟器的模拟信息(纬度、经度、高度);4:数字按键(本型号未涉及);5:正方形按键从上至下分别为自定义场景、静态场景、动态场景;6:GPS信号输出端口;7:信号输出指示灯;1.2模拟器操作说明第一步:连接电源线,将模拟器通过RS232串口(直连线)与PC机连接;第二步:打开电源开关;第三步:选择场景,GPS-5000A信号模拟器提供三种场景:自定义场景、静态场景、动态场景。
1.按下“自定义场景”按钮,按钮变亮;主机待机,等待用户编辑场景数据;点击PC机模拟器软件,编辑场景,运行场景(详见2.2节)。
当信号输出指示灯闪烁后,表示模拟器正常工作,信号开始输出。
2.按下“静态场景”按钮,按钮变亮;不需要用户编辑场景数据,而是自动按照预设的一个静态场景运行;当信号输出指示灯闪烁后,模拟器正常工作,信号开始输出。
3.按下“动态场景”按钮,按钮变亮,当信号输出指示灯闪烁后,模拟器正常工作,信号开始输出。
1.3场景模式切换若需要更改场景时,将已经按下的按钮弹出,三个按钮显示灰色,重新选择新的场景。
【注意】一次只能选择一个场景,即一次只能按下一个按钮,更换场景时需要将上一个场景按钮复位。
场景切换时,系统需要5s左右重新启动时间,当指示灯熄灭后又重新开始闪烁时,表示新场景信号开始正常输出。
1.4场景说明1.4.1自定义场景自定义场景为用户提供更加丰富的场景选择,使用户能够对部分模拟器参数进行调整,编辑更加复杂的轨迹,自定义场景需要上位机软件通过RS232串口交叉线传输数据才能正常运行。
1.4.2静态场景本模拟器提供“一键式”场景设定,按下前面板的“静态场景”按钮,主机按照预设的一个静态场景运行,不再需要通过上位机软件设定场景参数,方便用户测试。
部分参数如下1.4.3动态场景模拟器已内设一个动态场景,部分参数如下1.5衰减器使用说明GPS-5000A信号模拟器初始信号为-90dBm,GPS-5000A信号模拟器提供粗衰减(±10dB)和精衰减(±1dB)。
GNSS信号模拟器操作规程

GNSS信号模拟器操作规程
1、独立操作人员必须经过技术培训考试合格后方可上岗操作。
2、主控计算机操作系统禁止更改登录密码、另设用户账户登录。
3、开始使用模拟器时首先对硬件模拟器加电,待硬件模拟器运行稳定后再打开主控计算机,以保证模拟器安全。
4、模拟器使用结束后,应先关闭模拟器主控仿真软件后,确认硬件模拟器仿真结束后再对硬件模拟器断电,最后关闭主控计算机。
5、使用模拟器主控仿真软件设计仿真场景在保存该仿真场景时应按仿真场景使用用途时间日期重新命名并另存为,一般尽量不要覆盖硬盘上现有的仿真场景。
6、GNSS信号模拟器工作环境温度应在仪器限定范围内,避免在过高温度下工作造成元件损坏,当工作温度过高时应对硬件模拟器做降温处理。
7、信号模拟器在工作期间不得断电,且工作期间尽量不要移动搬运硬件模拟器。
8、信号模拟器在使用完毕后,应关闭锁上设备机柜,清理现场。
9、GNSS信号模拟器应专人保管和使用;使用中出现问题,应及时报告,按指示进行处理,不得擅自处理,并且对问题和处理要做记录。
音乐喷泉北斗信号模拟器使用介绍

北斗信号模拟器使用介绍8254 的作业方法如下述:(1) 方法0 :计数到0 完毕输出正跃变信号方法;(2) 方法1:硬件可重触发单稳方法;(3) 方法2 :频率发生器方法;(4) 方法3 :方波发生器;(5) 方法4 :软件触发选通方法;(6) 方法5 :硬件触发选通方法;8254 的操控字有两个:一个用来设置计数器的作业方法,称为方法操控字;另一个用来设置读回指令,称为读回操控字。
这两个操控字共用一个地址,由标识位来区别。
当读回操控字的D4 位为0 时,由该读回操控字D1~D2 位指定的计数器的状况存放器内容将被锁存到状况存放器中。
状况字格局如图5.4所示:8254具有3个独立的16位计数器,6种不一样的作业方法。
计数存放器用来存放计数初值,计数作业单元为16位减1计数器,它的初值便是计数存放器内容,计数单元对CLK脉冲计数,每呈现一个CLK脉冲,计数器减1,当减为零时,通过OUT输出指示信号标明计数单元已为零。
当作为定时器作业时,每逢计数单元为零时,计数存放器内容会主动从头装入计数单元,并且CLK输入是均匀的脉冲序列,所以OUT输出频率是降低了的(相对于CLK信号频率)脉冲序列。
当作为计数器作业时,标明只关怀在CLK端呈现(代表作业)的脉冲个数,当CLK端呈现了规则个数的脉冲时,OUT输出一个脉冲信号。
行扫描法辨认闭合键的原理是:先通过行端口输出数据,使第0号行接低电平,其他行为高电平。
然后从列端口读入列线状况,查看是不是有列线为低电平。
若是有某条列线变为低电平,则标明第0行和此列线相交的方位上的键被按下。
若是没有任何一条列线为低电平,则阐明第0行上没有键被按下。
MOV CX,000FHT1: MOV AX,009FHT2: DEC AX ;使AX减1JNZ T2 ;AX不为0重复T2LOOP T1 ;CX不为0重复T1POP CX ;使CX出栈RET延时子程序运用的是循环程序,微机作业一条句子仅需求几微秒的时辰,让句子屡次的循环就完毕延功用时,就能够让句子实施的时辰延伸。
GPS信号模拟器使用介绍

GPS信号模拟器使用介绍串口通讯作为一种古老而又灵活的通讯方式,被广泛地应用于PC间的通讯以及PC和单片机之间的通讯之中。
提到串口通讯的编程,人们往往会立刻想到C,汇编等对系统低层操作支持较好的编程语言以及大串繁琐的代码。
实际上,只要我们借助相关的ActiveX控件的帮助,即使是在底层操作一向不被人看到的VB中,一样能够实现串口通讯,甚至其实现发放和C,汇编相比,更加快捷[6]。
在Visual Basic中有一个名为Microsoft Communication Control(简称MSComm)的通讯控件。
我们只要通过对此控件的属性和事件进行相应编程操作,就可以轻松的实现串口通讯。
1.1.1计算机的串口在PC上,有各种各样的接头,其中有两个9针的接头区,如图5-10所示,这就是串行通信端口。
PC上的串行接口有多个名称:232口、串口、通信口、COM口和异步口等。
6.4.2.1串行端口的中断(1)中断概述。
中断即IRQ(Interrupt Request)。
CPU一般情况下是连续进行工作,一旦外围设备(如打印机、串行端口等)需要CPU处理事件时,就会通过硬件线路(即中断线路)来通知CPU。
CPU收到通知后,就会停下正在做的工作,转而去执行外围设备的请求。
(2)查看计算机内的中断。
在Windows系统中,打开设备管理器,在“查看”菜单项选择“依照类型排序资源”,打开中断请求(IRQ)项,可以看到计算机中各设备的中断分配信息。
如下图:6.4.2.2串行端口地址(1)地址概述。
在计算机内,每个设备都有一个地址。
当CPU需要传送信息或者是从外围设备读取信息时,必须知道信息在什么地方,这个具体地方就是外围设备的地址。
在计算机内部使用十六进制的方式记录每个外围设备的地址,每个设备的地址都是不一样的,这样才能保证信息的读写不会出错。
一个设备所要占用的地址号码可能不止一个,如果需要占用多个地址,那么所占用的地址一般情况下是连续的。
HG-SIM2 高性能 GNSS 信号模拟器产品说明书
HG-SIM2高性能GNSS信号模拟器产品说明书支持双系统卫星信号同时输出支持GPS L1和BD2 B1频点支持射频回放功能北京星源北斗导航技术有限责任公司2017 年 5 月 5 日表A 文档信息表更多详细信息请致电星源北斗咨询!公司地址:北京市海淀区温泉镇显龙山路19号北辰香麓雅庭1座218室电话及传真:136****9930,************QQ:5024141邮箱:***************1 产品概述表1 产品价格表HG-SIM2信号模拟器是本公司在HG-RFSIM V1.0模拟器基础上的升级,是本公司历经多年研发,里程碑式的重要产品。
其易用性和信号质量已经达到或超过国外同类产品的水平。
HG-SIM2的硬件部分为HG-RFSIM2-M,对HG-RFSIM V1.0的一些细节做改进,包括散热,衰减控制等等。
HG-RFSIM2-M在器件选型上更为精细,特别是尽量选用低功耗的器件,减少电源热损耗,增大了板子的尺寸,选择散热更好的金属外壳,外壳的宽度为11cm,长度18.3cm。
模拟器使用外部+5V供电,体积不大,易于携带。
HG-RFSIM2-M还带有独立的DSP处理器,可更好地实现模拟器的计算功能。
图1 HG-RFSIM2-M信号模拟器硬件HG-SIM2全面采用8~12bit D/A数据输出,有效降低了量化损耗。
HG-SIM V2.0可支持GPS L1和BD B1信号的同时模拟生成,适合对接收机进行GPS/BD 联合定位的测试。
HG-SIM2具备强大的轨迹输入功能,预设常见的轨迹,并且支持等时间间隔的点迹输入。
HG-SIM V2.0还可以支持轨迹的动态链接库DLL,用户完全可以自定义轨迹。
图2 HG-SIM2模拟器软件3GPP模型图3 HG-SIM2模拟器软件直线运动模型图4 HG-SIM2模拟器软件圆周运动模型对于已经预设的轨迹,用户可以在树形结构中任意增减同类型的轨迹,修改后的轨迹参数可以保存起来供下次使用,极为方便。
GPS信号模拟器实用方法

GPS信号模拟器实用方法1.1具体设计所谓数据库维护模块就是对前面所建立的数据库中的4个表格内容进行操作。
完成对4种雷达信号的删除,增加,修改等功能。
由于每种雷达信号的编写方式类似。
这里主要介绍常规脉冲信号模块的编程方法。
1.1.1控件选择控件清单:Command控件4个,frame控件2个,text控件2个(一个是text 数组),adodc控件一个,DataGrid控件一个。
1.1.2数据库显示这里数据显示过程是用Datagride表格显示数据库中的常规脉冲信号。
我们这里用的连接数据库的控件是ADO Data.ADO Data控件属于ActiveX控件,使用以前必须将其添加到工具箱中[4]。
添加方法如下:单击“工程“/“部件”菜单项,弹出“部件”对话框。
在“部件”对话框中选择“microsoft ADO Data Conctrol 6.0(OLE DB)”列表项,单击确定按钮,即可将ADO Data控件添加到工具箱中。
将鼠标移到工具箱中,将显示该控件的名称“Adodc”双击工具箱中的ADO Data控件图标或单击ADO Data控件后在窗体上拖拽鼠标,即可将ADO Data控件加到窗体中。
然后再设置ADO Data控件连接Access数据库:1.在窗体上面添加一个ADO Data控件以后,单击该控件,在右侧的属性列表中找到ConnectionString属性,单击【…】按钮,将弹出下图对话框。
2.在属性页对话框中选择“使用连接字符串“连接数据库3.单击生成按钮,选择“Microsoft OLE DB Provider for ODBC Drivers“喷泉水景,水幕电影,波光泉,喷泉设备,音乐喷泉,水景设备,喷泉公司。
中冀联合GPS北斗GLONASS卫星信号模拟器(三模)
GNSS多通道卫星模拟器用户手册深圳市中冀联合通讯技术有限公司目录1 GNSS多通道卫星模拟器简介 (1)1.1 GNSS多通道卫星模拟器 (1)1.2 GNSS多通道卫星模拟器外观 (1)2 主要指标及测试图 (2)2.1 主要特点 (2)2.2 性能指标 (2)2.3 定位测试结果图............................................................................. 错误!未定义书签。
3 模拟器操作过程 (4)3.1 硬件设置 (4)3.2 软件操作 (4)3.3 运行场景 (9)3.4 模拟器状态查看 (10)3.4.1 Satellite Data................................................................. 错误!未定义书签。
3.4.2星空图.................................................................................. 错误!未定义书签。
3.4.3 NMEA数据............................................................................ 错误!未定义书签。
3.4.4位置信息.............................................................................. 错误!未定义书签。
3.4.5 模拟位置实时显示............................................................. 错误!未定义书签。
3.4.6 界面总体图......................................................................... 错误!未定义书签。
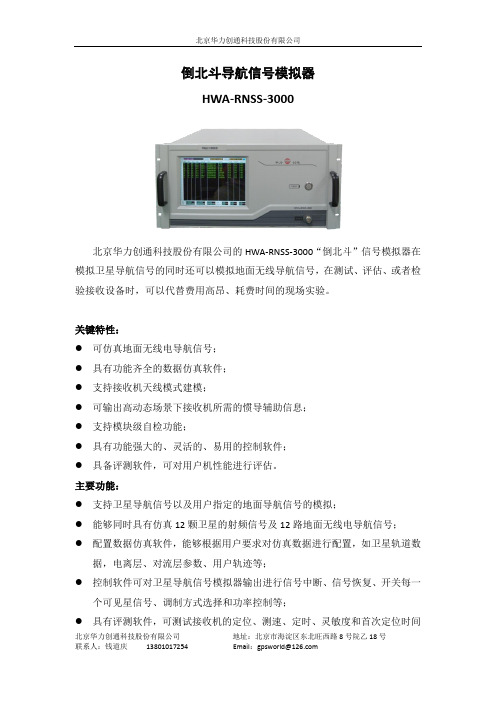
HWA-RNSS-3000 倒北斗导航信号模拟器
通道间一致性: <0.1m(码)
<0.0005m(载波)
载波与伪码初始相干性:<1 度
信号质量
杂波功率(最大): -60dBc
谐波功率(最大): -40dBc
相位噪声:
-80dBc/Hz@100Hz
-85dBc/Hz@1kHz
-90dBc/Hz@10kHz
频率稳定性:
-95dBc/Hz@100kHz 5×10-10/s
在 HWA-RNSS-3000 卫星导航信号模拟器的基础上增加惯导辅助,与卫星导航 信号同步输出三维位置、三维速度、三维加速度,辅助接收机在高动态下捕 获、跟踪和定位。 (二) 多径信号 在 HWA-RNSS-3000 卫星导航信号模拟器的基础上每个频点能够增加 6~12 个多路径信号与主径信号合成输出。 (三) 载体自转仿真 HWA-RNSS-3000 的控制仿真软件可以支持模拟在载体自转时,卫星导航信号 的变化情况。从而使卫星导航接收设备在地面测试中,充分模拟真实的运动 情况。 应用领域 “倒北斗”导航接收机研发、测试。
平均故障修复时间(MTTR): ≤2 小时
一次连续工作时间:
≥24 小时
计算机工作站推荐配置
操作系统:
Windows XP 或以上
处理器:
intel @2GHz 或更高
对外接口:
RS232 或 千兆以太网口
北京华力创通科技股份有限公司
联系人:钱道庆
13801017254
地址:北京市海淀区东北旺西路 8 号院乙 18 号 Email:gpsworld@
具有功能齐全的数据仿真软件;
支持接收机天线模式建模;
可输出高动态场景下接收机所需的惯导辅助信息;
GPS卫星模拟器GPS101使用说明

A n i i n n o v a t i v e a a p p r o a c h f f o r v vIsolation>25 dB at 1575.42 MHz>30 dB typical at 1575.42 MHzG E N E R A LCalibration Interval1 yearAC Input90 to 120 VAC, 50 to 400 Hz200 to 240 VAC, 50 to 60 HzBattery Operation Time120 minutes minimum, 360 minutes nominalAC Power Consumption<50 W maximum, <40 W typicalBattery Charge TimeUnit Operating8 hours for full charge @ 115 VAC, 60 HzUnit non-operating6 hours for full charge @ 115 VAC, 60 HzOperating Temperature-20° to +55°CStorage Temperature-20° to +70°CHumidity95% (±5%), non-condensing+10° to +30°CDimensions292 mm wide; 131 mm high; 412 mm deep, does not include handle.11.4 in. wide; 5.1 in. high; 16.1 in. deep, does not include handle. Weight9 kg (20 Ibs.) maximum (with battery) does not include lid and lid con-tentsC O N N E C T O R T T Y P E SRF OutputTNC, FemaleAuxiliary Port25-pin D-Sub, MaleRS-232 "REMOTE" (COMM 1)9-pin D-Sub, Male, PC compatibleRS-232/422 "RECEIVER" (COMM 2)25-PIN D-Sub, Male, PC compatibleFCC Type Accepted, CFR47 Part 87.Complies with UL/CSA/EU Product Safety Standards V E R S I O N S A A N D A A C C E S S O R I E SWhen ordering please quote the full ordering number information.Ordering NumbersVersions101-110GPS-101 Global Positioning System Ramp T est Set, 110 VAC operation101-220GPS-101 Global Positioning System Ramp T est Set, 220 VAC operationAccessoriesOPT 10.1 ppm High Stability Time BaseAll Aeroflex Avionics products delivered with Factory Certificate of CalibrationFor the very latest specifications visit CHINATel: [+86] (21) 62828001 Fax: [+86] (21) 62828002 EUROPETel: [+44] (0) 1438 742200 Fax: [+44] (0) 1438 727601 FRANCETel: [+33] 160 79 96 00 Fax: [+33] 160 7769 22HONG KONGTel: [+852] 28327988Fax: [+852] 28345364SCANDINAVIATel: [+45] 96140045Fax: [+45] 96140047SPAINTel: [+34] (91) 640 1134Fax: [+34] (91) 640 06 40UNITED KINGDOMTel: [+44] (0) 1438 742200Toll Free: [+44] (0800) 282388 (UK only)Fax: [+44] (0) 1438 727601USATel: [+1] (316) 5224981Toll Free: [+1] (800) 8352352(US only)Fax: [+1] (316) 5221360w w w.a e r o f l e x.c o mi n f o-t e s t@a e r o f l e x.c o mAs we are always seeking to improve our products,the information in this document gives only a generalindication of the product capacity, performance andsuitability, none of which shall form part of any con-tract. We reserve the right to make design changeswithout notice. All trademarks are acknowledged.Parent company Aeroflex, Inc. ©Aeroflex2003.Part No. 46891/034, Issue 3, 08/03。
北斗卫星导航系统测量型模块技术要求及测试方法-最新国标
北斗卫星导航系统测量型模块技术要求及测试方法1范围本标准规定了北斗卫星导航系统测量型模块(以下简称模块)的技术要求和测试方法。
本标准适用于北斗卫星导航系统测量型模块的设计、生产、研制、检测和维护。
2规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T39267-2020北斗卫星导航术语BD410002A-2022北斗/全球卫星导航系统(GNSS)接收机差分数据格式(一)BD410003A-2022北斗/全球卫星导航系统(GNSS)接收机差分数据格式(二)BD410004-2015北斗/全球卫星导航系统(GNSS)接收机导航定位数据输出格式3术语、定义和缩略语3.1术语和定义“GB/T39267-2020北斗卫星导航术语”界定的以及下列术语和定义适用于本文件。
3.1.1捕获灵敏度acquisition sensitivity用户设备在冷启动条件下,捕获导航信号并正常定位所需的最低信号电平。
[来源:GB/T39267-2020,5.2.7]3.1.2跟踪灵敏度tracking sensitivity用户设备在正常定位后,能够继续保持对导航信号的跟踪和定位所需的最低信号电平。
[来源:GB/T39267-2020,5.2.8]3.1.3冷启动cold start用户设备在星历、历书、概略时间和概略位置未知的状态下,从开机到正常定位的状态。
3.1.4热启动hot start用户设备在星历、历书、概略时间和概略位置已知的状态下,从开机到正常定位的状态。
3.1.5首次定位时间time to first fix用户设备开机至获得首次正确定位所需的时间。
[来源:GB/T39267-2020,5.1.40]3.1.6内部噪声水平interior noise level由测量型模块通道间的随机偏差,锁相环、码跟踪环的随机偏差,以及其钟差残差等引起的测距和测相误差。
北斗卫星导航模拟器卫星钟差参数生成方法研究
北斗卫星导航模拟器卫星钟差参数生成方法研究杨晓昆;李锦清;徐沛虎;胡强【摘要】本文介绍了北斗卫星导航模拟器卫星钟差参数生成方法,提出了相应的计算方法.计算结果表明,文中给出的具体计算方法是正确的,其拟合精度以特定时间间隔的卫星钟差的误差表示时,误差精度小于1.1ns.【期刊名称】《现代导航》【年(卷),期】2018(009)001【总页数】4页(P6-9)【关键词】北斗;导航;钟差【作者】杨晓昆;李锦清;徐沛虎;胡强【作者单位】中国航天科工信息技术研究院,北京 100070;中国航天科工信息技术研究院,北京 100070;中国航天科工信息技术研究院,北京 100070;中国航天科工信息技术研究院,北京 100070【正文语种】中文【中图分类】P2280 概述北斗卫星导航系统简称北斗系统,其空间星座由5颗地球静止轨道(GEO)卫星、27颗中圆地球轨道(MEO)卫星和3颗倾斜地球同步轨道(IGSO)卫星组成[1]。
北斗导航信号模拟器根据设计的BD-2卫星位置、接收机位置及空间环境影响等仿真计算导航接收机接收到的导航信号观测数据(包括载波相位、伪距和导航电文),采用模拟的方法生成导航接收机接收到的导航信号;并且能够显示系统运行时的BD-2卫星和导航站的位置、接收机载体的运行轨迹和各种参数。
其中一项关键的参数就是卫星钟差参数。
卫星钟差采用二阶多项式表示:a0:星钟偏差,相对于系统时间的偏差;a1:钟速,相对于实际频率的偏差系数;a2:半加速(频率漂移的一半)。
卫星钟一般为铷钟或铯钟,铷钟和铯钟的性能不尽相同。
钟差参数a0、a1、a2的获取可以分为两种方式:(1)钟差参数法钟差参数可以由用户通过界面设定,并可保存在文件中;也可从文件中读取。
(2)拟合参数法从文件中读取钟差值,通过拟合计算得到钟差参数[2]。
拟合方法采用最小二乘法。
国际GNSS服务(International GNSS Service, IGS)于1994年进入完全运行状态后开始提供 GPS精密星历[3]。
“北斗一号”导航定位动态信号的模拟实现

“北斗一号”导航定位动态信号的模拟实现张桂华;孙彩英【期刊名称】《系统仿真学报》【年(卷),期】2005(17)11【摘要】随着GPS、GLONASS、GALILEO和我国北斗导航系统的建设,各种导航定位用户机在国民经济和国防建设中的应用越来越广泛,其性能也越来越受到用户的重视和关心。
如何进行导航定位用户机的测试与试验,是很多用户必须面临的问题。
采用卫星导航信号模拟器,仿真真实的导航信号环境,对用户机进行功能检查和性能试验,是解决这一问题的有效途径。
该文介绍了“北斗一号”双星定位系统的工作机制以及动态信号的模拟要求,详细阐述了模拟信号各种动态特征的实现途径,并对模拟信号进行了计算机仿真和系统实现。
仿真和试验结果表明:“北斗一号”双星定位动态信号的模拟实现途径可行,能够满足各种用户设备的性能测试与验证。
【总页数】4页(P2731-2733)【关键词】卫星导航;动态模拟;系统仿真;双星定位【作者】张桂华;孙彩英【作者单位】西安电子科技大学;中电集团第五十四研究所【正文语种】中文【中图分类】TP391.9【相关文献】1.基于卫星导航信号模拟法的北斗接收机导航精度校准测试 [J], 叶剑峰;彭军;李娜娜2.北斗一号卫星导航系统定位算法及精度分析 [J], 赵树强;许爱华;张荣之;郭小红3."北斗一号卫星导航定位系统"在气象自动站中的应用 [J], 汪波;刘丽彬4.基于北斗一号卫星导航定位系统及GIS技术在物流配送管理中的应用 [J], 章竟;王耀球;潘峰5.北斗一号卫星导航定位系统在抛弃式海洋移动观测平台的应用 [J], 张少永;李文彬;商红梅;张文良;郜庆杰;袁成平因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北斗信号模拟器实用方法
1.1.1数据库操作方法
本课题对数据库操作主要是使用的ADO Data控件的提供的方法来实现的。
4.2.4.1ADO Data控件的AddNew方法向表中增加一条记录
功能:为可更新的Recordset对象创建新记录。
语法:recordest.Addnew FieldList, Values
参数说明:Fieldlist 可选。
新记录中字段的单个或一组字段名称或者序列位置。
Values 可选。
新记录中字段的单个或一组值。
如果Fields是数组,那么Values 也必须是有相同成员数的数组,否则将发生错误。
字段名称的次序必须与每个数组中的字段值得次序想匹配。
4.2.4.2ADO Data控件的RecordSource属性查询记录
功能:RecordSource属性用来返回或者设置语句或返回一个记录集的查询.
语法:obiect.RecordSourse[=value]
参数说明:Object 一个对象表达式,其值为“应用于”列表中的一个对象
Value 一个字符串表达式,他指定了一个记录源
4.2.4.3ADO Data控件的Delete方法删除一条记录
功能:删除当前记录或者记录组
语法:recordset.Delete AffectRecords
参数说明:
AffectRecords AffectEnum值,确定Delete方法所影响的记录数目。
4.2.4.4ADO Data控件的Updata方法修改记录。
功能:保存对Recordset对象的当前记录所做的所有更改.
语法:recordset.Update Fields, Value
参数说明:Fields 可选。
变体型,代表单个名称;或者变体型数组,代表需要修改的字段(单个或者多个)名称或序号位置。
Values 可选。
变体型,代表单个值;或者变体型数组,代表新记录中字段(单个或多个)值。
修改记录应该分为4步:
1.通过一个唯一的字段查询要修改的记录。
2.将该记录中要修改的数据显示在文本框中,给用户修改。
3按.照1步中的字段,查询表中的记录。
4.如记录存在,修改该记录,将文本框中的值赋给对应的字段。
1.1.2代码程序:
常规脉冲信号增加代码:
Private Sub Command2_Click()
Dim i As Integer
Adodc1.RecordSource = "select * from 常规脉冲信号"
i = Adodc1.Recordset.RecordCount
i = i + 1
If Text2(0).Text > 2 And Text2(0).Text < 20 And Text2(1).Text < 2000 And Text2(2).Text > 500 And Text2(2).Text < 300000 And Text2(3).Text > 5 And Text2(3).Text < 60 And Text2(5).Text < 360 And Text2(6).Text > 2 And Text2(6).Text < 7 And Text2(4).Text > 0 Then
Adodc1.Recordset.AddNew
Adodc1.Recordset.Fields(0) = i
Adodc1.Recordset.Fields(1) = Text2(0).Text
Adodc1.Recordset.Fields(2) = Text2(1).Text
Adodc1.Recordset.Fields(3) = Text2(2).Text
Adodc1.Recordset.Fields(4) = Text2(3).Text
Adodc1.Recordset.Fields(5) = Text2(4).Text
Adodc1.Recordset.Fields(6) = Text2(5).Text
Adodc1.Recordset.Fields(7) = Combo1.Text
Adodc1.Recordset.Fields(8) = Text2(6).Text
Adodc1.Recordset.Update
MsgBox "添加成功"
Else
MsgBox "输入有误"
End If
End Sub
2.常规脉冲删除代码:
Private Sub Command1_Click()
Dim j As Integer
Dim i As Integer
Dim k As Integer
j = Text1.Text
Adodc1.RecordSource = "select * from 常规脉冲信号"
i = Adodc1.Recordset.RecordCount
Adodc1.RecordSource = "select * from 常规脉冲信号where 雷达编号=" + Text1.Text + ""
Adodc1.Refresh。