雷达功能键基本操作资料
1832说明书

2.1.雷达的开机/关机:按[POWER]键,可以开机或关机,开机后操作面板背光灯亮,在屏幕上会显示仪器的预热时间,时间是以倒计时方式显示即1:30至0:01。
2.2.发射与待机:当雷达开机预热结束后,屏幕上显示有STBY字样,这时按[STBY TX]键后,雷达就进入正常的工作状态,再次按该键,雷达又会回到待机状态。
节能状态:这个功能可使仪器自动进入待机,以减少能源的消耗,这时消耗的功率为28W,当仪器处在节能状态时,在[POWER]键边的节能指示灯会点亮。
显示航海资料:如果将航海数据输入该雷达后,雷达在待机状态时可以显示船舶的航行情况,如下列图示:2.3.选择量程:按[-RANGE+]键,可以选择雷达量程的大小,具体选择的量程显示在雷达屏幕的左上角。
2.4.调节屏幕显示的亮度:屏幕的显示亮度分为16级,按[BRILL]键,随时可以调节显示亮度。
2.5.雷达的增益调节:雷达的增益是通过[GAIN]钮调节的,调节的方法是将雷达的量程选择在远距离档,然后调节增益[GAIN]钮,使屏幕上显示的背景噪声隐约可见。
2.6.雨雪干扰抑制调整,海浪干扰抑制调整通过调节[A/C SEA]和[A/C RAIN]钮,可以抑制雨雪及海浪对雷达产生的干扰。
调节方法如下:1、海浪杂波控制调整[A/C SEA]由海浪引起的反射回波是令人讨厌的,它以随机信号〔所谓的“海浪杂波”〕的形式覆盖在显示器的中心部分。
浪高、天线旋转慢,则海浪杂波向外扩展,海浪杂波以大量小回波信号形式显现在显示器上,它可以影响雷达性能〔见图〕海浪干扰抑制效果抑制海浪杂波的作用,就是减小近距离海浪杂波的幅度〔近距离杂波最大〕。
随距离的增加,杂波幅度也逐渐减小。
海浪杂波抑制仅在约4海里以内才起作用。
恰当地调节抗海浪杂波控制器,可使杂波分裂为小亮点,使小目标也可分辨。
但控制过头,杂波和目标都将在屏幕上消失。
2、雨雪干扰抑制功能的具体操作与上述相同:雨雪干扰抑制效果2.7.自动干扰抑制功能:自动调节干扰抑制。
船用雷达的操作和使用

4、海浪抑制的调整
按出海浪抑制(A/C SEA)旋钮,并 慢慢右旋,海浪杂波表现为零碎的小点, 以便使隐藏在海浪杂波里的小目标能识别 到,之后,可将按下旋钮锁定。
一般经验是使得船顺风一侧的海浪 杂波消失,迎风一侧的海浪杂波变小些。
第六章 船用导航雷达的操作使用
三、目标的测量
(一)目标距离的测量 1、利用固定距标圈粗略估测目标的距离
2、利用“+”字游标测量目标的距离
使“+”字游标的中心与回波内侧相重
3、利合用“VRM”精确测量目标的距 离 使“VRM”圈与回波内侧相切
第六章 船用导航雷达的操作使用
三、目标的测量
(二)目标方位的测量
1、利用“+”字游标测量估测目标的方位
使“+”字游标的中心与回波中心相重 合,从CRT底部中间读出目标的方位
2、利用“EBL”精确测量目标的方位
将“+”字游标的中心与回波中心相重 合,按一次“EBL”,使电子方位线在 回波中心,从CRT左下角读出方位。
测报格式:× ×号目标,方位(右舷或 左舷) × × × 度,距离× × × 海里。
第六章 船用导航雷达的操作使用
雷达关机
1、关闭所有打开的功能; 2、将“增益”(GAIN)反时针旋转到底; 3、按“TX/OFF”按键,关闭发射; 4、同时按下“POWER/OFF”和 “TX/ 5、切O断F整F流”器键电,源关或闭船雷电达。电源;
海浪控制 抑制 海浪引起的杂波
增益 调整接收 机的增益
Anti-Clutter Sea,通过减小 近距离目标增益实现的 (R≤4nm)
适当调整增益,可提高目 标分辨力
第六章 船用导航雷达的操作使用
08 雷达操作

第一节 船用雷达的主要控钮
3.雨雪干扰抑制控钮(FTC/RAIN/ANTI CLUTTER RAIN)
该控钮实际上是在回波视频放大器输入电路部分接入
的一个微分电路FTC,将宽回波视频信号微分变窄,突
出了回波的前沿,以此抑制雨雪等大片连续干扰回波。
注意:使用该控钮时突出了目标的前沿,但微分处理同 时也削弱了目标回波,因此该控钮在雨雪天要酌情调节, 达到既去除雨雪干扰杂波,又不丢失雨雪中物标回波的 效果。
第二节 船用雷达的操作步骤
三、关机步骤
1.雷达电源开关从发射位置转到STAND-BY
2.将“亮度”、“STC”等钮关到最小 3.将“天线开关”置于“断”位置 4.将雷达电源开关置于“关”位置 5.关闭中频电源,断开船电闸刀
第二节 船用雷达的操作步骤
四、注意事项
1.开机前一定要检查天线附近是否有人或其它障碍物 2.开机前、关机前及量程转换前均应先将“亮度”旋钮 关小
九、性能测试开关
1.性能监视器开关(PERFORMANCE MONITOR) 2.测试电表转换开关(一般放在收发机内部)
第二节 船用雷达的操作步骤
一、开机前准备工作
1.检查雷达电源开关及发射开关是否在“OFF”档,亮 度控钮是否在最小位置 2.检查天线上是否有人或障碍物 3.气温太低或空气太潮湿时,先合上船电闸刀,让机内 各加热电阻通电加热后再开机
第四章 船用雷达的操作安装维护
第一节 船用雷达的主要控钮
一、控制电源的开关
1.船电闸刀(SHIP’S POWER SWITCH) 位置:雷达电源间或机舱配电间 作用:开关闭合后,雷达各分机的加热电阻通电,用 于潮湿天气时为各分机加温驱潮 使用:雷达控制面板上的雷达电源开关合上后,加热 电阻断电,在干热天气不使用雷达时或雷达机内进行 维护保养时,应断开 2.雷达电源开关(RADAR POWER SWITCH) 位置:设置于雷达控制面板上 作用:控制中频电源通断及雷达正常发射 使用:两个或三个开关档
BR_3440_ARPA雷达操作
实验四 ARPA操作目的与要求1.1.掌握BR-3440 ARPA的开关机和基本操作。
2.2.掌握ARPA的基本功能和使用方法。
3.3.加深对ARPA基本概念和显示信息的理解。
4.4.了解ARPA的优点和局限性。
实验内容BR 3440 ARPA雷达操作一、面板控钮介绍(图4.1)1 POWER――电源开关。
2 ON/STBY――预备/发射按钮。
3 BRIGHTNESS――亮度调节旋钮。
亮度调节旋钮用于调节CRT的亮度使之与周围的环境相匹配。
4 CONTRAST――对比度调节旋钮。
对比度调节旋钮用于调节雷达视频图像的对比度。
5 DEGAUSS――消磁按钮。
只有彩色CRT上才有这个按钮。
用于消除当周围环境的磁场变化所引起的色彩失真时。
单色显示器上没有这个按钮(MA和M系列)。
6 PANEL――控制台面板亮度调节旋钮。
7 TUNE――调谐旋钮。
8 RAIN(FTC)――抗雨雪干扰旋钮。
9 SEA(STC)――抗海浪干扰旋钮。
10 GAIN――增益旋钮。
11 EBL――电子方位线。
包括三个控钮:电子方位线1(EBL1)选择开关、电子方位线2(EBL2)选择开关、电子方位线调节旋钮。
按下电子方位线开关,打开相应的电子方位线,然后通过调节旋钮移动电子方位线进行测量。
电子方位线的测量值显示在CRT数据显示区的左下角,如图4.2的G区域。
EBL1由短虚线组成,EBL2由长虚线组成。
EBL开关是双态型,每按下一次,交替选择ON和OFF状态。
当前所选择的电子方位线,其测量值以高亮度显示。
EBL2同时也用于调整电子平行方位线的方位和EBL偏心显示。
电子方位线调整旋钮和EBL2配合可实现电子方位线的偏心显示。
使用的方法是,移动电子游标指针到PPI屏幕上的某一位置上,按下电子方位线调整旋钮,打开EBL2,游标所指的位置成为EBL2的起始点,同时VRM2打开,可用EBL2和VRM2测量屏幕上任意两点的方位和距离。
12 VRM――活动距标圈。
JRC航海雷达JMA-7303_7252_7253中文操作说明书
JRC航海雷达 JMA-7303_7252_7253中文操作说明书JMA-7303-C (A)JMA-7253-7 (CA) / 9 (CA)JMA-7252-6 (CA) / 9 (CA)JMA-7303雷达- 1 -第一章操作面板说明注意:本章对所有按键均以中文命名及解说,以后所有章节中涉及到的按键只以英文表示。
附图标号英文名中文名作用(1) [BRIL] [显示屏亮度] 控制显示屏亮度(2) [TUNE] [调谐] 调谐目标回波清晰度 (3) [RAIN] 雨雪抑制] 清除雨雪干扰(4) [SEA] [海浪抑制] 清除海浪干扰(5) [GAIN] [增益] 控制雷达接收回波强度(6) [POWER ON] [电源] 雷达电源开关(7) [TX/ST-BY] [发射/预备] 每次开机预热3 分钟后,“ST-BY”显示出来,按一下这个键,雷达开始发射。
(8)- (9) [OFF-OFF] [关电源] 同时按这两个键关闭雷达电源 (10) [PANEL] [面板亮度] 控制面板上所有按键和旋钮的亮度(11) [VIDIO] [回波亮度] 控制回波图象亮度(12) [TEST] [测试] 检测显示器功能(13) [OWN TRACK] [本船航迹] 配置导航设备后,可显示本船航迹(14) [RANG RING] [固定距标圈亮度] 控制固定距标圈的显示亮度(15) [VRM] [可变距标圈亮度] 控制可变距标圈的显示亮度(16) [EBL/PI] [方位线] 改变电子方位线及平行线亮度(17) [ARPA/MARK] [ARPA/标志亮度] 控制ARPA功能的矢量,标志的亮度(18) [PI] [平行线] 平行线开关键(19) [MARK] [标记] 按此键显示标记(20) [MARK CLR] [标记取消] 移动光标至标记处按下此键取消标记,连续按下2秒以上取消所有标记(21) [AUTO TUNE] [自动调谐] 进入自动调谐方式(22) [AUTO RAIN] [自动雨雪抑制] 自动调节雨雪抑制强度(23) [AUTO SEA] [自动海浪抑制] 自动调节海浪抑制强度 (24) [DATA ENTRY] [数据输入] 数字输入键(25) [MENU] [菜单] 显示菜单(26) [ENTER] [确认] 确认光标指定区域的数据- 2 -(27) [TRACKBALL] [光标球] 移动光标(28) [EBL] [方位线] 改变电子方位线角度 (29) [EBL1/EBL2] [方位线1/方位线2] 选择显示方位线1或方位线2 (30) [RANGE RINGS] [固定距标圈] 显示固定距标圈 (31) [VRM1/VRM2] [可变距标圈1/2] 选择显示可变距标圈 (32) [AZI MODE] [显示模式选择开关] 航向向上、船首向上、正北向上选择 (33) [PULSE WIDTH] [脉冲宽度选择] 选择发射脉冲宽度 (34) [SHM OFF] [消除船首标志线]按下此键时,船首线暂时消隐 (35) [ALARM ACK] [报警复位] 报警确认、消音(36) [OFF CENTER] [中心偏移] 通过本船中心偏移可扩大观察范围(在半径65%之内) (37) [RANGE] [量程选择] 可选择量程从0.25NM~120NM (38) [TM/RM] [真运动/相对运动选择] 变换真运动或相对运动显示方式 (39) [TM/RESET] [真运动复位] 在真运动方式下,把本船位置恢复到屏幕的始发点(40) [TRAILS] [航迹显示] 显示其它船只的航迹 (41) [GUARD ZONE] [报警区开关] 显示报警区菜单 (42) [PAST POSN] [目标航迹显示] 显示目标航迹和设置目标航迹的记录间隔(43) [VECT TIME] [矢量长度] 设定矢量长度(44) [TRUE REL] [真运动/相对运动航线] 选择真运动或相对运动显示方式(45) [DATA READ] [目标读数] 读取跟踪目标数据 (46) [MANUAL] [人工获取目标] 人工跟踪目标开关 (47) [AUTO] [自动获取目标] 自动跟踪目标(48) [CANSEL] [取消目标] 清除正在观察的目标的标志及矢量,取消跟踪- 3 -第二章基本操作2.1 操作流程打开电源开始工作调谐观察目标,调整图象质量读取测量数据结束操作,关机以上为基本操作流程图,具体操作随后详细介绍。
雷达操作手册827
OFF/ON
3 STERN MARK船尾标记
OFF/ON
4 INDEX LINE BEARING索引线方位浮动/真实
REL/TRUE
5 INDEX LINE索引线1/2/3/6
1/2/3/6
6 INDEX LINE MODE索引线模式
VERTICAL/HORIZONTAL垂直/水平
Other modes: STERN-UP,HEAD UP TB RM,COURSE UP RM,NORTH UP RM,
NORTH UP TM
2.点击左键选择所需模式
Loss of gyrocompass signal丢失罗经信号
当丢失罗经信号时,罗经读数器显示”HEADING SET”航向设置,显示模式自动变为船艏向上,所有ARP和AIS目标以及海图将消失.恢复罗经信号,选择相应模式
True Motion真运动模式
North—up
Stern--up
1.12.1 Choose presentation mode
利用键盘
连续按[MODE]键选择所需模式,PRESENTATION MODE框里显示最新模式.
利用鼠标
1.把鼠标放在屏幕左上角PRESENTATION MODE框上,
HEAD UP RM
3.点击右键,选择CURSOR菜单
4.转动滚轮选择”2”,点击左键
5.转动滚轮,选择需要的功能,点击左键
6.指导方框显示”XX/EXIT.”(XX表示功能选择),拖动鼠标放在所需项目处
7.点击左键,即可实现所选功能
8.关闭所选功能项,指导方框显示”XX/EXIT.”(XX表示功能选择)时点击右键
Cursor Menu item光标菜单项目
雷达功能熟悉
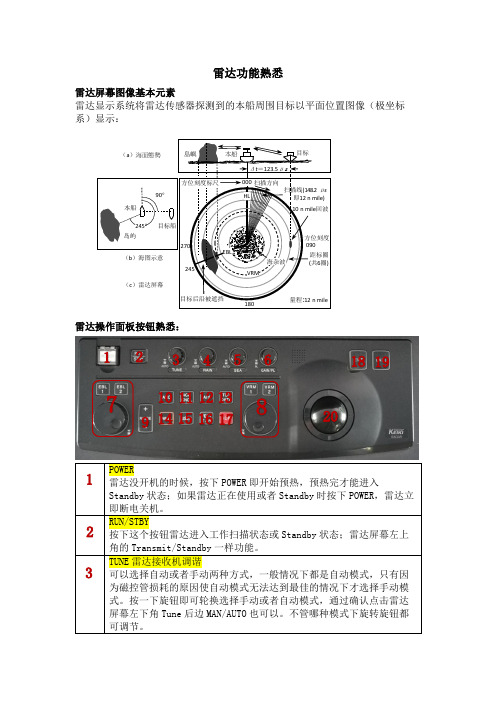
(b)海图示意
245
(c)雷达屏幕
EBL 海杂波
VRM
方位刻度 090
距标圈 (共6圈)
目标后沿被遮挡 180
量程:12 n mile
雷达操作面板按钮熟悉:
1 2 3456
7
10 11 12 13 9 14 15 16 17
8
18 19 20WER 即开始预热,预热完才能进入 Standby
FUNC3,FUNC4;鼠标点击雷达屏幕左下角的 FUNC 处也可调节。所谓
FUNCTION 就是根据航行可能遇到情况将相关雷达的设置调整好,像干
扰抑制,图像处理,物标放大,脉冲宽度,物标轨迹以及其他的一些雷
达设置等等都可以 FUNCTION 中设定,这样需要时就可以快速调出需要
的雷达设置,出厂设定为:
USER FUNCTION SETTING 进行设定。
通常情况下一般保持 FUNC OFF,根据航行情况适时调整雷达设定。
16
VECT T/R 物标运动矢量线显示方式 分为真运动(T)和相对运动(R)两种显示方式,相对运动为矢量合成。
雷达屏幕右上角也可以选择,还可以调整时间。
17
ACK alarm acknowledge 警报确认按钮 当雷达有警报产生时,按下此按钮可以消除警报。
量,时间可调;警报设定,最近距离和最近距 离时间,低于会有报警 8. AIS 设定,包括 AIS 标志,也可在此启动或者 关闭 AIS 的显示 9. 尾迹设定,真尾迹或相对尾迹以及显示时间 雷达日常使用: 1. 开/关机,可分为船电开关,电源开关和发射开关。 船电开关,雷达都设有专用的船电开关(Ship's supply),通常处于闭合通 电状态; 电源开关,在雷达显示器操作面板上启动电源开关(Power)后,雷达电源设 备开始工作,除了发射机高压电源之外,其他所有部分都已供电。经过 3 min 自动延迟后,延时继电器触点闭合,雷达发射机进入准工作状态。此时屏幕 指示“Standby”(预备),雷达发射机进入随时可以发射的状态,在这之前, 要确定确定天线上没有有人员或障碍物,特别是大风浪过后,还要仔细检查 天线周围是否有索具脱落; 发射开关,发射开关(Tx 或 Run)用于控制雷达发射机的工作。当雷达进入 预备状态后启动此开关,发射机开始发射,雷达进入完全工作状态。再次操 作此开关,雷达返回预备状态。 除船电开关外,电源开关(试岸电除外)一般也是不用关闭,大都是不用就 待机息屏,放大洋时就两部雷达交替使用,以延长磁控管的使用寿命。 2. 调整屏幕亮度,按钮亮度,以适应环境亮度最佳; 调整量程,选择显示方式和朝向显示,控制本船位置处于屏幕最佳位置; 调整增益,使噪声斑点刚刚看得见; 调整调谐,在调谐指示达到最大时,再微调调谐确认回波饱满清晰;然后置 调谐于自动调谐,并确认回波质量不低于手动调谐的最佳效果,否则采用手 动调谐; 3. 追踪物标,一般都是人工捕获,应遵循驾驶员最关注目标优先度捕获,即船 首、右舷、近距离的原则;也可按航行态势和航行需要逐个捕获目标;根据 雷达观测经验,在复杂的回波环境中辨识和捕获目标,避免捕获杂波、假回 波和不需要捕获的目标;随着航行态势不断变化,对新出现的相关目标或丢 失后需再次捕获的目标需要额外关注,期间不要忽略同时采用其他手段观测 4. 获取捕获的物标的信息,包括航速航向以及与我船的 CPA/TCPA 等,然后判断 态势采取行动,避免紧迫局面甚至碰撞危险的发生。
雷达操作说明
ARPA雷达(JMA 9823/9833)操作说明字体: 小中大| 打印发表于: 2007-12-24 17:06 作者: pengky 来源: 海员联盟ARPA雷达(JMA 9823/9833)操作说明ARPA雷达(JMA 9823/9833)操作说明一、按下PWR键,绿灯亮,3分钟后出现STAND BY,按下TX/STBY键,雷达开始工作;再按TX/STBY可停止发射,设备在预备状态。
二、调整SEA、RAIN、GAIN和BRILL钮,选择RANGE量程,调节TURN钮至物标清晰出现在荧光屏上;SEA、RAIN和TURN分别有手动和自动,但是雨雪和海浪不能同时自动。
三、捕捉物标,按下ACQ MANUAL键,移动光标到物标上,按下左键,物标被捕捉。
最多可捕捉50个物标。
四、读取物标数据,按下TGT DATA键,将光标移动到物标上,按下左键,物标数据被读取。
五、取消物标,按下ACQ/CANCEL键,将光标移动到物标上,按下左键,物标被取消。
六、设置方位线、距离圈,按下EBL和VRM键,荧光屏出现方位线、距离圈,旋转EBL 和VRM钮,设置方位和距离。
七、按下AZI/MODE键,进行真北、真运动、相对运动等选择。
八、按下PL键改变发射脉冲宽度。
九、按下TRUE/REL、VECT/TIME键进行真矢量和相对矢量选择。
十、按下TM/RM键,进行真运动和相对运动选择。
十一、按下OFF/CENT键进行偏心显示。
十二、按下MENU键有9个子菜单,1.IR,按下此键抑制同频干扰(如附近有SART信号应关闭此键)。
2.TGT ENH,按下此键为目标放大功能。
3.PROCESS,程序键。
4.FUNCTION,功能键。
5/ 6.EBL1/EBL2,电子方位线。
7.DATA OFF,按下此键关闭荧光屏部分数据。
8.SUB1 MENU子菜单,按下此键进入下一子菜单:①SETTING-设置罗经、速度、日期时间等内容,此雷达关机后罗经不能跟踪,故开机后要输入罗经航向。
JRC航海雷达 JMA-7725、7710中文操作说明书
JMA-7725/7710 雷达中文操作说明书Display Control Panel二、面板操作控制和按键1.[SUB MENU] 显示副菜单2.[MAIN MENU]显示主菜单3.Trackball 移动光标到所需位置4.5 [-] [+] 选择0.125~96/120海里量程6.[TUNE] 控制调谐使目标到最清晰的显示7.[GAIN] 控制雷达的接收灵敏度8.[RAIN] 在下雨/雪时减小杂波干扰9.[SEA] 减少海面的反射杂波干扰10.[BRIL] 调整显示器亮度11.[COLOR] 选择本船和其它船跟踪、标记和航迹颜色12.[FUNC] 选择预先设定的功能13.[GZ MENU] 显示设定的报警菜单14.[MAP] 雷达复合标绘模式开关15.[AZI MODE] 真北向上、船首向上、航向向上模式开关16.[HL OFF] 按住它可以使船首线暂时消隐17.[DAY/ NIGHT] 选择荧屏的颜色和亮度18.[OFF CNET] 移动本船位置到需要的地方(66%以内)或返回到中心位置(再长按一次)19.[RR] 开关固定距标圈20.[TRAILS] 显示/删除雷达尾迹21.[TX/ STBY] 选择雷达发射/预备状态22.[PANEL] 调节每个开关和控制盘上的控制字符的亮度23.[ALARM ACK] 报警确认,报警消音24.[VRMI / VRM2] 选择活动距标圈1或225.[VRM OFF] 选择开/关活动距标1/2 26.[VRM] 改变可变距标的尺寸27.[EBL1/EBL2] 选择电子方位线1或228.[EBL OFF] 选择开/关电子方位线1或2 29.[EBL] 改变电子方位线1或230.[F EBL] 开/关移动的EBL31.[TM RST] 在真方位显示下人工复位本船位置32.[TM/ RM] 开/关真方位显示或相对方位显示 33.[TGT DATA] 显示目标数据或用ATA 设置清除目标数字 34.[ACQ]在ATA 时人工选择目标35.[] 终点开/关测量两点间的距离(雷达模式)设定两点间单一的航向(标绘模式)。
雷达基本操作与设置
起回波变形。
⑥ 回波平均:两幅或多幅画面回波强度进行平均
化,提高屏幕杂波区域目标的检测能力。
4、辅助控钮
①扫描中心调整:左右和上下调整。 ②面板亮度 ③标绘照明:调整屏幕周围刻度盘亮度。
④船首消隐:便于观测船首线方位弱小目
标回波。
⑤性能监视器:用于监视雷达性能。
• 5、观测控钮
作用:测量目标位置和判断目标动态。
1)测量目标位置
① 量程选择(RANGE):量程变换,一般9个。经常变换量
程有利于发现目标,提高观测精度。
② 固定距标圈(RING ro FIX RANGE RING):同心圆。 ③ 活动距标圈(VRM):精确测距。地平内,内缘与目标前
沿相切;地平外,外缘与目标后沿相切。
2、 开机
STAND-BY后等待3分钟. 调节亮度,使扫描线刚见未见; 调增益,使屏上噪声刚见未见 ;3分钟后发射,调节调谐, 使回波多而清晰饱满。
注意:不要同时使用多个抗杂波干扰控制,特别是CFAR 不要与其它抗干扰一起使用。狭水道航行时小心使用抗干 扰控制。
3、 关机
电源置STAND-BY,将亮度、增益STC等调最小。除 非长期不使用雷达,通常电源置于STAND-BY即可。
3)调谐:用于调整本振境因素的变化随时 漂移,观测时随时调整。
3、抑制杂波
作用:消除杂波和干扰。
① 海浪抑制(STC/AUTO):消除海浪杂波。 ② 抗雨雪(FTC/AUTO):抑制雨雪干扰。 ③ 同频干扰(RIC/IR):消除雷达互干扰。 ④ 恒虚警率(CFAR):自动抗强杂波干扰。
二、雷达基本操作与设置
(一)、雷达主要控钮操作要领
1、电源控钮(电源闸刀、电源开关、发射开关) 1)电源闸刀:通常闭合状态,与船电相接。 2)电源开关:为雷达所有部分加载电源(除发射机
FR-1510 MARK-3雷达操作说明
FR-1510 MARK-3雷达操作说明广州拓洋无线电设备有限公司地址:广州市番禺区市桥镇富华东路82号番安综合市场32-34号电话:020-******** 传真:020-********一、 按键说明BRILL : 亮度调节(按键实现白天/晚上模式转换) A/C RAIN :抗雨雪干扰A/C :抗海浪干扰(按键开启/关闭,自动干扰抑制)GAIN :增益(按键临时消隐船首线)DIMMER : 亮度:背景颜色选择显示方式船首上航向上,正北上目标轨迹 设置两目标警报区 偏心显示 平行光标线 飘浮电子方位线输入EPA 标记(需输入罗经、计程仪信号) 标记参考标记或RADAR MAP 标记 选择F1功能控制项目在ST-BY 状态预置F2、FUNCTION 键控制项 主菜单取消输入,停止跟踪输入选择电源开关直接控制面板:报警开关:固定矩标:选择预置功能FUN1,2,3二、 显示说明量程刻度量程圈间隔脉冲宽度显示方式:HU/HU TB/CU/NU/TM船首线船首标记警报区第一区在3-6NM内有效第二区在所有区均有效平行光标线平行光标参照本船数据船首速度值和传感器类(需输入相关信号)光标位置及由原点至光标需时本船经纬度数据温度和深度(需输入相关数据)ARPA数据(需输入相关数据)失去信号警报控制设置活动矩标圈正北标记尾标电子方位线平行光标线参考三、 操作说明1.开机[POWER]开按钮在显示器的左下角,按下开机,再按一下关机。
(注:在开机之前检查显示器背面的S2开关拔到ON的位置。
)2.发射开机后,当显示屏中央出现 “STBY”时,表明可按[STBY/TX]发射;当你暂时不用而又想让机器保持准备状态,再按一下[STBY/TX]。
3.显示屏亮度调整日间及晚上的光线环境不同的影响,而要用显示器下部的[BRILL]键调节屏幕的显示亮度。
4.控制面板背景灯按[DIMMER]键可以改变面板背景亮度。
5.接收机调谐1)自动调谐机器出厂时设在自动调谐状态,在显示屏右上角显示 “AUTO”。
CW、E系列雷达使用说明书

基本说明
CW 系列雷达彩色显示器参数表
尺寸
C90W
C120W
C140W
重量
C90W
C120W
C140W
安装方式
电源
环境: 温度 湿度 显示面板 分辨率 C90W
C120W C140W 可显示窗口
亮度 白天/夜晚模式 语言 系统警报类型
317x197x156mm(不包括支架,下同) 380x245x156mm 424x277x156mm 3.85kg 4.76kg 5.58kg 支架安装或嵌入控制台安装(详见安装手 册) 输入电压 10.7-32v DC(直流) 正负极安全绝缘 最大功耗: C90W 19W C120W 22W C140W 32W 外部安装要求防水等级 CFR46 -10°C 至+50°C 最高 95%,在 35°C 不结露 彩色 TFT LCD 800 x 480 像素(WVGA) 1280 x 800 像素(WXGA) 1280 x 800 像素(WXGA) 海图、雷达、渔探、CDI(航向监控显示)、 AIS(船舶自动识别系统)、发动机仪表 64 级调节 可选择屏幕亮暗以适应当时环境 可选取中文、美式英语、英式英语等 报警时钟、锚状态、抵港、深水、MOB、脱 离航线、浅滩、温度、定时
菜单系统选项粗体加黑字体为默认值方位模式纬度经度tdstd设置变化模拟器关闭打开自动演示功能方位模式真方位磁方位mob数据模式航位推测法位置变化航向自动手动手动变化范围030ew语言英式英语美式英语法语德语等扩展字符关闭打开设置复位将所有系统设置选项设置为工厂默认值设置及数据复位将系统复位包括鱼探仪但dsm不会系统复位日期时间设置见下面子菜单单位设置见下面子菜单系统连接见下面子菜单菜单系统选项粗体加黑字体为默认值日期格式时间格式12小时制24小时制当地时差utc时间13小时菜单系统选项粗体加黑字体为默认值距离单位海里英里千米速度单位英里千米深度单位英尺温度单位华氏度摄氏度菜单系统选项粗体加黑字体为默认值dsc信息显示打开关闭seatalk报警可用状态不可用隔离nmea船首数据用于防止nmea船首数据串扰进seatalk总线如使用marpa功能且有外接快速船首传感器时应关闭此功能打开关闭nmea输出设置apbbwcbwrdbtdptggagllmtwrmarmbrmcrsdrtettmvhwvlwvtgwplzda33显示器画面设置331显示器设置键调出主菜单
基本操作(导波雷达)
基本的操作
一.按键的使用
E键确认键
+ 、—用来加减数值或在菜单中上下选择
+ 、—同时按退出子菜单,进入上一级菜单,直至测量界面
二.基本参数空标、满标的设置
在测量界面前提下,按E键进入主菜单按+、—键选择basic setup菜单
连续按E键进入,直至显示empty calibr 菜单,在此设置空标
直至显示full calibr 菜单, 在此设置满标
三.做一个MAPPING,可抑制虚假的错误的信号
1.在测量界面前提下,按E键,进入主菜单再按+、—键选择extended calibr.菜单,按E进入,再按+、—键选择mapping子菜单,按E进入,显示界面为;
Dist. / meas.value 008
Dist. ××××.×××mm
n.val ××.×%
2.再按E键进入, 选择manual子菜单, 按E进入, 显示界面为:
range of mapping 052
input of mapping range
在此输入数值为: 上一界面中的Dist. ××××.×××mm —500mm,
(前提为:表的显示液位等于罐内实际液位) 再按E键确认, 选择start mapping on, 然后界面会闪烁recoding mapping 几秒,表明mapping 已完成,再同时按+、—键退出到测量界面
3.当罐内液位为0时,最适合按此方法做MAPPING.。
雷达操作

海上勘探事业部船舶中心
03/2011
目录
一 二 三 四 雷达操作 雷达观察 ARP操作 ARP操作 AIS操作 AIS操作
一、雷达操作
1.1 打开电源 位于控制单元的左角。 开关护盖, ) 位于控制单元的左角。打开 POWER 开关护盖,按开关开启雷达
[POWER] 开关 (
系统。再次按开关可关闭雷达。 秒内, 系统。再次按开关可关闭雷达。打开电源后大约 30 秒内,屏幕上会显示方位刻度和数字计 时器。计时器将倒计时三分钟的预热时间。磁控管(即发射管)将在这段时间内预热, 时器。计时器将倒计时三分钟的预热时间。磁控管(即发射管)将在这段时间内预热,以备 发射。当计时器数到“0:00 时 屏幕中间会显示“ST-BY” 待机) 发射。当计时器数到“0:00”时,屏幕中间会显示“ST-BY (待机) ,表示雷达随时可以 发 射脉冲。 在待机状态下,不显示标记、距离圈、地图、图表等等。而且, 射脉冲。 在待机状态下,不显示标记、距离圈、地图、图表等等。而且,取消 ARP 并清 显示。在预热和待机条件下,以小时和十分之一小时计算的“ TIME”和 除 AIS 显示。在预热和待机条件下,以小时和十分之一小时计算的“ON TIME 和“TX TIME” TIME 出现在屏幕中央。 出现在屏幕中央。
一、雷达操作
1.9 调整灵敏度
增益控制按钮可以调整接收器的灵敏度。 增益控制按钮可以调整接收器的灵敏度。 当背景噪讯刚好在屏幕上可见,此时的设置最合适。设置的灵敏度太低, 当背景噪讯刚好在屏幕上可见,此时的设置最合适。设置的灵敏度太低,会丢失较弱的回波 。另一方面,灵敏度过高则会产生太多的背景噪讯;信号较强的目标可能会因所需回波和显 另一方面,灵敏度过高则会产生太多的背景噪讯; 示屏上背景噪讯之间的对比过度过低而丢失。 示屏上背景噪讯之间的对比过度过低而丢失。 要调节接收器的灵敏度,调整增益控制按钮,使背景噪讯刚好在屏幕上可见。 要调节接收器的灵敏度,调整增益控制按钮,使背景噪讯刚好在屏幕上可见。 操纵键盘 监视屏幕顶部增益级别指示符的同时, [GAIN](增益)控制按钮, 敏度。 监视屏幕顶部增益级别指示符的同时,操纵 [GAIN](增益)控制按钮,调整灵 敏度。 操纵跟踪球 转动跟踪球,将箭头置于屏幕顶部的增益级别指示器内。 转动跟踪球,将箭头置于屏幕顶部的增益级别指示器内。
JRC航海雷达 JMA-7303_7252_7253中文操作说明书
船用雷达JMA-7303-C (A)JMA-7253-7 (CA) / 9 (CA) JMA-7252-6 (CA) / 9 (CA) 操作手册JMA-7303雷达第一章操作面板说明注意:本章对所有按键均以中文命名及解说,以后所有章节中涉及到的按键只以英文表示。
附图标号英文名中文名作用(1) [BRIL] [显示屏亮度] 控制显示屏亮度(2) [TUNE] [调谐] 调谐目标回波清晰度(3) [RAIN] 雨雪抑制] 清除雨雪干扰(4) [SEA] [海浪抑制] 清除海浪干扰(5) [GAIN] [增益] 控制雷达接收回波强度(6) [POWER ON] [电源] 雷达电源开关(7) [TX/ST-BY] [发射/预备] 每次开机预热3 分钟后,“ST-BY”显示出来,按一下这个键,雷达开始发射。
(8)- (9) [OFF-OFF] [关电源] 同时按这两个键关闭雷达电源(10) [PANEL] [面板亮度] 控制面板上所有按键和旋钮的亮度(11) [VIDIO] [回波亮度] 控制回波图象亮度(12) [TEST] [测试] 检测显示器功能(13) [OWN TRACK] [本船航迹] 配置导航设备后,可显示本船航迹(14) [RANG RING] [固定距标圈亮度] 控制固定距标圈的显示亮度(15) [VRM] [可变距标圈亮度] 控制可变距标圈的显示亮度(16) [EBL/PI] [方位线] 改变电子方位线及平行线亮度(17) [ARPA/MARK] [ARPA/标志亮度] 控制ARPA功能的矢量,标志的亮度(18) [PI] [平行线] 平行线开关键(19) [MARK] [标记] 按此键显示标记(20) [MARK CLR] [标记取消] 移动光标至标记处按下此键取消标记,连续按下2秒以上取消所有标记(21) [AUTO TUNE] [自动调谐] 进入自动调谐方式(22) [AUTO RAIN] [自动雨雪抑制] 自动调节雨雪抑制强度(23) [AUTO SEA] [自动海浪抑制] 自动调节海浪抑制强度(24) [DATA ENTRY] [数据输入] 数字输入键(25) [MENU] [菜单] 显示菜单(26) [ENTER] [确认] 确认光标指定区域的数据(27) [TRACKBALL] [光标球] 移动光标(28) [EBL] [方位线] 改变电子方位线角度(29) [EBL1/EBL2] [方位线1/方位线2] 选择显示方位线1或方位线2(30) [RANGE RINGS] [固定距标圈] 显示固定距标圈(31) [VRM1/VRM2] [可变距标圈1/2] 选择显示可变距标圈(32) [AZI MODE] [显示模式选择开关] 航向向上、船首向上、正北向上选择(33) [PULSE WIDTH] [脉冲宽度选择] 选择发射脉冲宽度(34) [SHM OFF] [消除船首标志线] 按下此键时,船首线暂时消隐(35) [ALARM ACK] [报警复位] 报警确认、消音(36) [OFF CENTER] [中心偏移] 通过本船中心偏移可扩大观察范围(在半径65%之内)(37) [RANGE] [量程选择] 可选择量程从0.25NM~120NM(38) [TM/RM] [真运动/相对运动选择] 变换真运动或相对运动显示方式(39) [TM/RESET] [真运动复位] 在真运动方式下,把本船位置恢复到屏幕的始发点(40) [TRAILS] [航迹显示] 显示其它船只的航迹(41) [GUARD ZONE] [报警区开关] 显示报警区菜单(42)[PAST POSN] [目标航迹显示] 显示目标航迹和设置目标航迹的记录间隔(43)[VECT TIME] [矢量长度] 设定矢量长度(44)[TRUE REL] [真运动/相对运动航线] 选择真运动或相对运动显示方式(45)[DATA READ] [目标读数] 读取跟踪目标数据(46)[MANUAL] [人工获取目标] 人工跟踪目标开关(47)[AUTO] [自动获取目标] 自动跟踪目标(48)[CANSEL] [取消目标] 清除正在观察的目标的标志及矢量,取消跟踪第二章基本操作2.1 操作流程以上为基本操作流程图,具体操作随后详细介绍。
雷达简要操作说明
雷达简要操作说明
雷达简要操作说明
1.开启电源
电源开关位于控制器的左角,打开电源开关盖并按下开关,开启雷达.再按此开关,关闭雷达.开启电源后约30秒,屏幕出现方位刻度和数字计时器.倒计时3分钟预热,以便对磁控管进行预热,当计时器到0:00时,屏幕中间显示”ST-BY”,表示雷达备妥.在预热和备妥时,屏幕中间显是开机时间和发射时间计数.
2.发射
当荧光屏上显示备妥状态时,按下键盘STBY/TX键即可.
3.雷达开机时,初始设定为上次使用过的量程及脉冲宽度,其他参数
如屏幕亮度,活动距标圈,电子方位线和菜单中的任选项也设置为上次使用时的设置.
4.STBY/TX键可使雷达处于预备或发射状态.预备状态下,天线不转,在
发射状态下,天线转动.为延长磁控管寿命,建议在不使用时,轮换到预备状态.
5.快速启动
如果雷达刚刚使用过,磁控管仍热,则不需要3分钟预热时间就可使雷达在发射状态工作.如果因操作失误等类似原因关掉了雷达,而又想立即使用,则可以在关机10秒内开机,以快速启动.。
雷达功能键基本操作资料

YM COSMOS雷達功能鍵基本操作●通則:記憶槽中上方為A槽,下方為B槽。
每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。
或或S band。
WG84:GPS系統規格。
相對風向及風速。
●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按心。
自動。
●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。
長脈波。
記錄當時各船之位置及時間。
改善與設定白天及晚上之面板及螢幕之亮度。
1.DAY:白天模式。
2.NIGHT1:夜晚模式1。
a.HEADING LINE:船艏線亮度。
b.EBL/VRM:電子方位線/可變距離圈亮度。
c.CURSOR:游標亮度。
d.ARPA:自動雷達測繪援助亮度。
e.TOOLS/RANGE RINGS:工具/距離圈亮度。
f.ROUTES:航路亮度。
g.HISTORY TRACKS:航跡亮度。
h.MAPS:海圖亮度。
i.MENU TEXT:清單信文亮度(?)。
j.TARGET ALARM:目標警報亮度。
k.ALARM TEXT:警報信文亮度。
l.EXIT BRILLIANCE:離開光亮調整。
m.DEFAULT BRILL:不執行亮度調整。
n.PANEL BRILL+:面板亮度增加。
o.PANEL BRILL-:面板亮度減少。
3.NIGHT2:夜晚模式2。
4.NIGHT3:夜晚模式3。
調整螢幕強度。
1.Mode system:。
2.mode RX:。
對地速度,through the water):對水速度。
以左鍵按NAV可選船速資料之來源.游標移至數字欄(變黃)可手動輸入。
●選C,D,M,V,T。
,,。
相對運動目標相對運動模式。
相對運動目標真運動模式。
真/相對向量模式時間。
真艉跡顯示時間。
99分,將會顯示”PERM”。
(?)。
●Warning Prompts:警告提醒。
按ERBL,於EBL上出現一小圈,表示距離。
●快速方位及距離開啟,將游標移至雷達掃瞄幕中,按左鍵持續3秒左右,可快速顯示EBL及VRM。
船用雷达的操作和使用
4、海浪抑制的调整
按出海浪抑制(A/C SEA)旋钮,并 慢慢右旋,海浪杂波表现为零碎的小点, 以便使隐藏在海浪杂波里的小目标能识别 到,之后,可将按下旋钮锁定。
一般经验是使得船顺风一侧的海浪 杂波消失,迎风一侧的海浪杂波变小些。
第六章 船用导航雷达的操作使用
三、目标的测量
(一)目标距离的测量 1、利用固定距标圈粗略估测目标的距离
置雷达于“ST-BY” 状态
第六章 船用导航雷达的操作使用
FR-7100D型雷达操作面板介绍
一、调整旋钮介绍
图标 旋钮名称及功 能
备注
调谐 调整本振 频率,使fS-fL=FI
雨雪控制 抑制 雨雪引起的杂波
开机30分钟内不断调整,使较 远处目标、较弱目标清新可见 (调谐指示框亮最多)
Anti-Clutter Rain,是利用微 分电路实现的抑制雨雪杂波的
海浪控制 抑制 海浪引起的杂波
增益 调整接收 机的增益
Anti-Clutter Sea,通过减小 近距离目标增益实现的 (R≤4nm)
适当调整增益,可提高目 标分辨力
第六章 船用导航Байду номын сангаас达的操作使用
二、按键介绍
图标 按键含义
按键功能及备注
电源开/关 发射/关
系统开关机,关机时需同时按 下此键和“TX/OFF”键
2、利用“+”字游标测量目标的距离
使“+”字游标的中心与回波内侧相重
3、利合用“VRM”精确测量目标的距 离 使“VRM”圈与回波内侧相切
第六章 船用导航雷达的操作使用
三、目标的测量
(二)目标方位的测量
1、利用“+”字游标测量估测目标的方位
雷达说明书2117
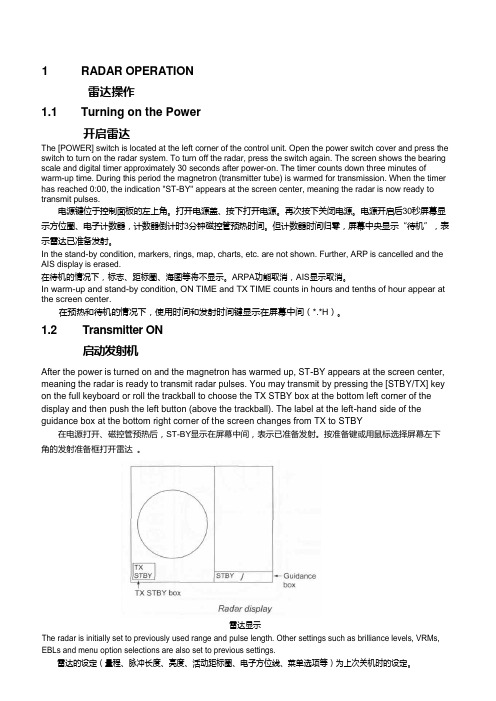
1 RADAR OPERATION雷达操作1.1 Turning on the Power开启雷达The [POWER] switch is located at the left corner of the control unit. Open the power switch cover and press the switch to turn on the radar system. To turn off the radar, press the switch again. The screen shows the bearing scale and digital timer approximately 30 seconds after power-on. The timer counts down three minutes of warm-up time. During this period the magnetron (transmitter tube) is warmed for transmission. When the timer has reached 0:00, the indication "ST-BY" appears at the screen center, meaning the radar is now ready to transmit pulses.电源键位于控制面板的左上角。
打开电源盖、按下打开电源。
再次按下关闭电源。
电源开启后30秒屏幕显示方位圈、电子计数器,计数器倒计时3分钟磁控管预热时间。
但计数器时间归零,屏幕中央显示“待机”,表示雷达已准备发射。
In the stand-by condition, markers, rings, map, charts, etc. are not shown. Further, ARP is cancelled and the AIS display is erased.在待机的情况下,标志、距标圈、海图等将不显示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
YM COSMOS雷達功能鍵基本操作●通則:記憶槽中上方為A槽,下方為B槽。
每5000小時或螢幕左下角之TUNE衰減則需更換磁控管。
TX A(X) (Transceiver)或TX A(S):X band 或S band。
●TRANSMIT:雷達開始發射,天線旋轉。
●INITIALISATION:最初設定之參數。
●MONITOR TEST:●OWN POSITION以游標選之,週期互換。
1.OWN POSITION (NAV):本船位置。
T:緯度。
b.LON:經度。
c.UTC XX:XX:XX W84格林威治時間,WG84:GPS系統規格。
2.WAY POINT:轉向點資料。
a.WPT nnn:轉向點編號。
b.T BRG nnn.n:到下一轉向點之真方位。
c.DTG nn.n NM:到下一轉向點之距離。
d.XTD(n) n.nn NM:航線左右限制之範圍。
e.TTG nn.nn:到下一轉向點之時間。
3.WIND AND DEPTH:風及水深之資料。
a.REL WIND:nnn KT,nnn°REL:相對風向及風速。
b.DEPTH nnnn M:水深。
●HL:Heading Line,SL:Stern Line。
●中心偏移:將游標重疊於本船中心(螢幕中心),按左鍵拖曳至想要之位置後放開;按CENTRE回螢幕中心。
●CENTER上之MAX VIEN為中心偏移之最大位置。
自動。
●TUNE旁之MAN:手動,AFC(AUTO FREQUENCY):●ENH改善小目標隻回跡(特別於3nm之RANG)用於小比例尺時,會減低目標之識別能力。
●SP:短脈波,MP:中脈波,LP:長脈波。
●EVENT:記錄當時各船之位置及時間。
●BRILL:改善與設定白天及晚上之面板及螢幕之亮度。
1.DAY:白天模式。
2.NIGHT1:夜晚模式1。
a.HEADING LINE:船艏線亮度。
b.EBL/VRM:電子方位線/可變距離圈亮度。
c.CURSOR:游標亮度。
d.ARPA:自動雷達測繪援助亮度。
e.TOOLS/RANGE RINGS:工具/距離圈亮度。
f.ROUTES:航路亮度。
g.HISTORY TRACKS:航跡亮度。
h.MAPS:海圖亮度。
i.MENU TEXT:清單信文亮度(?)。
j.TARGET ALARM:目標警報亮度。
k.ALARM TEXT:警報信文亮度。
l.EXIT BRILLIANCE:離開光亮調整。
m.DEFAULT BRILL:不執行亮度調整。
n.PANEL BRILL+:面板亮度增加。
o.PANEL BRILL-:面板亮度減少。
3.NIGHT2:夜晚模式2。
4.NIGHT3:夜晚模式3。
●PM(Performance monitoring):調整螢幕強度。
1.Mode system:。
2.mode RX:。
HDG:船艏向,COG(Course over ground):本船實際之航向,SOG(Speed over the ground):對地速度,STW(Speedthrough the water):對水速度。
以左鍵按NAV可選船速資料之來源.游標移至數字欄(變黃)可手動輸入。
●選HDG可看到C,D,M,V,T。
N UP: North up, H UP: Head up, C UP: Course up。
●RM (R)(Relative Motion-relative Trails):相對運動目標相對運動模式。
RM (T)( Relative Motion-True Trails): 相對運動目標真運動模式。
TM(True Motion):真運動模式。
●T/R VECTORS nn.n MIN:真/相對向量模式時間。
●T TRAILS SHORT n MIN:真艉跡顯示時間。
1.SHORT:高速衰弱顯示短艉跡。
2.LONG:低速衰弱顯示長艉跡。
3.PERM:永久顯示艉跡變為綠色,時間超過99分,將會顯示”PERM”。
4.OFF:從新顯示。
5.REST:保持目前選擇模式,螢幕重新掃瞄(?)。
●Warning Prompts:警告提醒。
按EBL 1可變ERBL,於EBL上出現一小圈,表示距離。
●快速方位及距離開啟,將游標移至雷達掃瞄幕中,按左鍵持續3秒左右,可快速顯示EBL及VRM。
●EBL 1/VRM 1只用於本船中心, EBL 2/VRM 2可用於本船中心及偏離本船。
●按EBL 2或VRM 2可選a: Centred: EBL/VRM以本船為中心基點.b: OFF-Centred:不以本船為為中心.c:Carried(通過,攜帶):本船移動,EBL/VAM同步移動,d: Drcpped: 本船移動,EBL/VAM不動。
ATA:AUTO Tracking Aid(自動追蹤援助),EPT:Electronic Plotting Aid(電子測定援助),ARPA:AUTORadar plotting Aid(自動雷達徹測定援助)。
●以游標置於目標向量上按右鍵,可取右鍵取消目標測定。
●手動測定目標僅用於0.5nm~48nm。
●如電羅經故障、不穩定之顯示、於備便狀態、或Range Scales 0.5nm~48nm,將無法測定目標。
●雷達目標如出現 1.╬:目標過船艏之距離低於設定值。
2.△:CPA/TCPA小於設定值。
3.▽:目標進入自動測定區。
4.◇:無法測定目標,在最後六次雷達脈波發射前,發出警告。
5.?:開始計算目標。
●目標資料:1.Plot XX:目標編號XX。
2.TIME:最後測量目標至現在之時間。
3.RANGE:本船與目標間之距離。
4.T BRG目標之真方位。
5.CPA:離目標之最近距離。
6.TCPA:最近距離之時間。
7.CSE/COG:目標對水/對地之航向。
8.STW/SOG:目標對水/對地之速度。
9.BC:過本船船艏之時間及距離。
●GZ(Guard zones):警界區;於EPA模式下可自動獲得,按GZ可開啟設定欄。
AZ(Auto Acquisition Zones):自動偵測區;按AZ可設定2個ANNULAR環狀警界圈及一個多邊型警界區。
環狀:將游標移至框線上案左鍵並移動以設定範圍,多邊型:以左鍵點畫範圍,右鍵消除,點回起點或最多10點以結束繪圖。
●以游標放置目標資料欄之上方按右鍵,可依序排列所有目標之單一之資料(如所有目標之CPA順序)。
●按TRIAL模擬:1.COURSE(如為CSE則為正在模擬中):模擬改變航向。
2.SPEED(如為CSE則為正在模擬中):模擬改變速度。
3.DELAT:模擬之行動延遲。
R(RELATIVE)/T(TRUE) VECTORS:設定相對/真運動向量時間,以滑動游標設定數值。
按RUNNING ON開始模擬。
ARPA:進入ARPA功能設定目錄。
1.ARPA ON/OFF:開/關ARPA資料欄。
2.PAST POSITION:船艉航跡之小點,按右鍵可選擇時間間隔。
3.TARGET ID在該欄選左鍵可進入NUMBER、NAME、BOTH、OFF設定選項(ARPA & ATA ONLY)。
TARGETS:設定目標名稱。
5.EXIT ARPA:離開ARPA模式。
6.CANCEL ALL TARGETS:消除所有目標之計算。
7.TEST TARGETS:進入目標資料欄。
a.TARGET 1 ON/OFF:開啟目標資料清單,如兩目標皆開啟,則螢幕下方會出現”X”代表完成目標之測試。
(可能為測量目標方位及距離之精確度?)。
b.EXIT TEST TARGETS:離開TEST TARGETS模式。
8.LIMITS & SETTINGS:進入功能設定。
a.AUTODROP:當目標對本船無威脅時自動退出。
向量顯示開/關。
b.VECTOR TIMEOUT ON/OFF:準許箭頭於本船向量上顯示,一個箭頭表示對水之速度(STW),二個c.OS VECTOR ARROW ON/OFF:箭頭表示對地之速度(SOG)。
d.NMEA TARGETS ALL:輸出之資料附合NMEA 0813標準。
e.CPA LIMIT:本船與他船之最小距離設定。
f.TCPA LIMIT:本船與他船之最小距離之時間設定。
g.BCR LIMIT:他船過本船船艏之距離設定。
h.BCT LIMIT:他船過本船船艏之距離之時間設定。
NAV進入NAV功能設定目錄。
1.OPSITION:設定本船位置。
a.MODE:設定航行模式。
◆NAV:接收外部信號定位,如GPS。
◆EP/DR:手動輸入估計船位。
T:手動輸入經度。
c.LON:手動輸入緯度。
d.DATUM W84:GPS之系統規格為WG84。
2.STEERING:於雷達上顯示航行計劃,但需連接VMS。
a.nn/name:轉向點之編號。
b.T BRG:至下一轉向點之真方位。
c.DTG:至下一轉向點之距離。
d.XTD(L)/(R):航線左右偏航之限制。
e.TTG:至下一轉向點之時間。
f.LEG TYPE:航線型式。
◆RHL:恆向線顯示。
◆GC:大圈顯示。
g.LEG ALARM:航線改變警告開/關。
h.EXIT STEERING:離開STEERING模式。
3.CURSOR DISP BOTH:選擇游標以經緯度顯示或方位距離方式顯示。
4.ROUTE DISPLAY ON/OFF:開/關航線顯示於雷達上,最多顯示10個轉向點,9段航路。
5.EXIT NAVIGATION:離開NAV模式。
,再6.TRACK HISTORY:顯示截取目標之記錄。
進入此模式後按DISPLAY ON,TARGET ON,RECORD ON選定要記錄之目標,最後按EVENT開始記錄,如要刪除記錄卡中之資料則按SYSETM,按MEMORY CARD,按DELETE FILE即可。
a.DISPLAY ON/OFF:開/關顯示截取目標之記錄。
b.TIME & EVENTS ON/OFF:開/關時間與事件顯示。
c.TARGET ID/NAME ON/OFF:開/關目標編號/名稱。
d.RECORD ON/OFF:開/關紀錄。
e.PLAY ON/OFF:開/關記憶卡及其中紀錄之播放。
f.INTERVAL 1 MIN:設定紀錄時間間隔,可以右鍵顯示清單。
g.SELECTED TARGES:選擇要播放之目標編號,可看單一目標或多目標之記錄。
h.EXIT TRACK HISTORY:離開截取目標記錄模式。
i.EVENT:紀錄結果,於螢幕上以□及時間標註曾紀錄之位置。
j.CLEAR TRACKS:清除截取之目標。
可修正游標位置(經緯度)。
k.OFFLINE:於STANDBY MODE◆LAT:設定游標之緯度。
◆LON:設定游標之經度。