基于卡尔曼滤波器的主燃油计量装置故障诊断
基于逆向卡尔曼滤波的电力变换器故障诊断方法

基于逆向卡尔曼滤波的电力变换器故障诊断方法刘子幸; 王子赟; 纪志成【期刊名称】《《电力系统保护与控制》》【年(卷),期】2019(047)009【总页数】8页(P19-26)【关键词】卡尔曼滤波; 逆向卡尔曼; 电力变换器; 故障诊断; 电解电容退化【作者】刘子幸; 王子赟; 纪志成【作者单位】江南大学物联网工程学院江苏无锡214122; 江南大学轻工过程先进控制教育部重点实验室江苏无锡214122; 江南大学物联网技术与应用教育部工程中心江苏无锡214122【正文语种】中文电力电子变换器作为系统转换中间环节的重要器件,可用于电力系统、能源、汽车、农业等领域[1-4]。
随着电子技术应用领域的拓展,变换器必将继续在各个领域发挥重要的作用,因此保障变换器的安全有效是一项极为重要的任务。
由于电解电容退化[5]、开关管故障[6]、焊点故障[7]等原因,常常导致斩波电路出现故障,因此对变换器故障诊断的研究显得尤为重要。
一般来说,故障诊断方法可以分为基于模型[8-9]的和基于数据驱动[10-11]的两大类。
其中基于数据驱动的故障诊断方法需要以充足可靠的历史数据为前提,但数据采集过程中往往会受到不同噪声的影响,数据质量不高,并且故障诊断的实时性不好[12-13]。
基于模型的故障诊断方法适用于精确模型已知的系统,对数据源的依赖性较低,数据处理较为简单易行,并且能够实现系统的实时故障诊断[14]。
文献[15]提出了一种基于小波神经网络的三相桥式逆变电路故障诊断方法,提高了电力电子电路故障诊断的速度和精度。
文献[16]提出了支持向量机和小波变换相结合的电力电子电路故障诊断方法,解决了故障诊断中计算复杂度过高的问题。
这些基于数据驱动的方法相比于基于模型的故障诊断方法在数据的可靠性和实时性等方面存在一定的不足。
也有学者将基于数据驱动和基于模型的故障诊断方法相结合使用,提出了基于小波变换和递推最小二乘(Recursive Least Squares, RLS)的故障诊断方法,提高了系统故障诊断的快速性[17]。
一篇卡尔曼滤波器故障检测

传感器信息融合卡尔曼滤波器故障检测摘要:提出了一种传感器信息融合卡尔曼滤波器测试方法。
测试方法基于一种规范化改进矩阵(normalized innovation matrix)谱模数学期望的统计量。
这种方法可以实时进行改进序列(innovation sequence)数学期望和方差的同时测试,并且无需由于故障导致的统计特性改变值的相关信息。
基于这种方法,提出了一种信息融合卡尔曼滤波器故障检测算法。
关键词:故障检测;卡尔曼滤波器;分布算法;传感器融合;矩阵范数1.引言卡尔曼滤波器的有效性测试在许多关于导航和控制的问题中很有必要。
基于此目的,已经出现了一些相关算法。
在参考文献3()中,提出了一种算法,通过这种算法不仅可以实现故障定位和检测,并且可以进行准确估计。
此外,目前提出的关于这类问题的算法还有很多,都可以用来进行不同故障信号的卡尔曼滤波故障检测。
尽管有许多测试卡尔曼滤波的算法,但是传感器信息融合卡尔曼滤波多通道修正的监测追踪和诊断问题至今研究仍较少。
在许多应用情况下,很可能需要去同时从多个信息源动态系统状态矢量上接收信息(比如一个综合导航系统)。
综合导航系统在许多地方成功应用。
在航空和海军导航系统,GPS ,DGPS ,GLONASS 和INS 系统中都是由卡尔曼滤波整合到不同的联合体中。
联合卡尔曼滤波器和分布式卡尔曼滤波器可以实现不同导航系统的整合。
这种滤波器就是多通道或者传感器信息融合卡尔曼滤波器。
系统参数和状态的多通道估计的算法已有人提出,这可以用来估计动态系统的数学模型,也可以估计一些测量通道的测量值。
在这些卡尔曼滤波器中,可用数据的同时处理使得可能提高状态矢量的估计精度和数据处理的可靠性。
但是,应用这些算法由于每一个估计的通道都需要一个故障检测器,因此大大增加了计算量。
因此,需要一种多通道估计程序的测试的简单算法,使之能在不需要获得故障存在引起的参数变化信息的情况下能够进行滤波器的实时测试。
如何判断燃油计量单元故障?

如何判断燃油计量单元故障?燃油计量单元(meun)是共轨系统当中极为重要的,不可缺少的部件之一。
它安装在高压油泵的进油位置,用于调整燃油供给量和燃油压力值,受ECU控制。
计量单元在工作过程中,由于油品问题容易出现各种故障。
今天我们就细说下“燃油计量单元”油泵计量单元的分类:油泵计量单元是一种比例电磁阀,从设计结构上可以分为两种:一种为常开型的计量单元,一种为常闭型的计量单元。
1、常开型计量单元主要适用于运输车辆。
在控制线圈没有通电时,燃油计量单元是导通的,可以给油泵提供最大流量的燃油。
ECU通过脉冲信号改变高压油泵进油截面积而增大或减小油量。
总而言之:不上电时阀门不关,电流越大阀门关闭越多!常开型的计量单元适用的油泵型号:CP2.2/CP3.3/CB2.8等。
常开型适用的ECU型号:EDC7UC31、EDC16C40、EDC17CV44常见常开型计量单元型号:型号适用发动机备注0928400617潍柴锡柴玉柴雷诺以潍柴,雷诺为主0928400627潍柴锡柴玉柴雷诺以玉柴为主0928400689潍柴锡柴玉柴雷诺以锡柴为主0928400644康明斯有些型号可以混装,他们最大的不同在于流量的差别,所以换错了以后会造成燃油计量单元的电流值不在正常范围之内,严重者还会引起限速1500转的问题。
2、常闭型的计量单元主要适用于乘用车辆。
这种计量单元不通电时电磁阀处于零供油位置,通往油泵的供油量应该为零。
简单地说就是不给电不打开,电流越大开度越大!常闭型的计量单元适用的泵型主要有:CP1.1 /CB1.8常闭型适用的ECU型号:EDC16C39、EDC17C53、EDC17C55 计量单元型号:型号适用发动机0928400728江铃、江淮、长城0928400802江铃、江淮、长城、日产0928400818CB18泵型博世燃油计量单元的技术参数:●ECU使用不同占空比的PWM波控制调节比例电磁阀。
频率为172Hz。
一篇卡尔曼滤波器故障检测
传感器信息融合卡尔曼滤波器故障检测摘要:提出了一种传感器信息融合卡尔曼滤波器测试方法。
测试方法基于一种规范化改进矩阵(normalized innovation matrix)谱模数学期望的统计量。
这种方法可以实时进行改进序列(innovation sequence)数学期望和方差的同时测试,并且无需由于故障导致的统计特性改变值的相关信息。
基于这种方法,提出了一种信息融合卡尔曼滤波器故障检测算法。
关键词:故障检测;卡尔曼滤波器;分布算法;传感器融合;矩阵范数1.引言卡尔曼滤波器的有效性测试在许多关于导航和控制的问题中很有必要。
基于此目的,已经出现了一些相关算法。
在参考文献3()中,提出了一种算法,通过这种算法不仅可以实现故障定位和检测,并且可以进行准确估计。
此外,目前提出的关于这类问题的算法还有很多,都可以用来进行不同故障信号的卡尔曼滤波故障检测。
尽管有许多测试卡尔曼滤波的算法,但是传感器信息融合卡尔曼滤波多通道修正的监测追踪和诊断问题至今研究仍较少。
在许多应用情况下,很可能需要去同时从多个信息源动态系统状态矢量上接收信息(比如一个综合导航系统)。
综合导航系统在许多地方成功应用。
在航空和海军导航系统,GPS ,DGPS ,GLONASS 和INS 系统中都是由卡尔曼滤波整合到不同的联合体中。
联合卡尔曼滤波器和分布式卡尔曼滤波器可以实现不同导航系统的整合。
这种滤波器就是多通道或者传感器信息融合卡尔曼滤波器。
系统参数和状态的多通道估计的算法已有人提出,这可以用来估计动态系统的数学模型,也可以估计一些测量通道的测量值。
在这些卡尔曼滤波器中,可用数据的同时处理使得可能提高状态矢量的估计精度和数据处理的可靠性。
但是,应用这些算法由于每一个估计的通道都需要一个故障检测器,因此大大增加了计算量。
因此,需要一种多通道估计程序的测试的简单算法,使之能在不需要获得故障存在引起的参数变化信息的情况下能够进行滤波器的实时测试。
基于卡尔曼滤波器的网络控制系统的故障检测

< 电气开关> 2 1. o5 (00 N . )
文章编 号 :0 4— 8 X(0 0 O 0 1 0 10 2 9 2 1 )5— 0 8— 3
基于卡尔曼滤波器的网络控制系统的故障检测
陈雨 张颖伟 ,
(. 1 广西大学行健文理 学院, 广西 南宁 5 00 ;. 3 05 2 东北大学 自动化研 究所 , 宁 沈 阳 10 0 ) 辽 10 4
() 2 网络仅存在于传感器与控制器之间, 传感器
数据采 用单包 传输 模式 ; () 3 网络诱 导 时延 为有 界 的 , 0<丁 即 <l,>1 Tf ,
并 且假设 时延 值可 在线获 取 ,源自由假设 ( ) 1 可知 , 网络诱
统进行 了故 障检 测 , 并 未 给 出具体 的观 测器 增益 矩 但 阵 的求取 。本文基 于上述 文献来继 续探讨 基于最 优观 测 器 一一卡尔曼滤 波器 的网络控制 系统 的故障检测 问 题 。卡尔曼 滤 波 器考 虑 到 了系 统 存 在 随 机 干 扰 的 影 响, 并按照状 态重构 误差 的方差 为 最小 准 则来 设 计 和
K e o ds n t r e o t lsse ;a l d tcin Kama i e y w r : ewok d c nr ytm fut ee t ; l nf tr o o l
求解 观测器 的反馈增 益矩 阵 。
1 引 言
网络控 制 系统 ( C , e okdC nr yt 是 N S N t re o t l s m) w oS e 指传感器 、 控制器 和执 行器 机 构通 过 串行 通 讯 网络形 成 的 闭环 的控制系统 。
( . igi o eeo c n ea d Lb rl r , u n x U i ri , a n g5 0 0 , hn ; . uo 1 X n j nC l g f i c n iea A t G a gi nv sy N n i 3 0 5 C ia 2 A t- a l Se s e t n
基于卡尔曼滤波器的控制系统传感器故障诊断
的分 离 。
卡 尔 基滤 波器 原 理
卡尔曼 滤波器( a nFlr是 由卡尔曼 于 16 K l ie) ma t 90
F i ril e c i e h rn i l ft e Kama l r a d t e h sa t e d s rb st e p i cp e o l n f t , n h c h i e s n o u i g o i meh d o e c n r l y tm a e n te e s rf h d a n ss t o f h o to se b s d o h a t s Ka n n i t r e s r h s lt n e u t h w h t h s h a f e s n o .T e i ai r s ls o t a t i l mu o s a p o c o fu t ig o i i b t f c e ta d p a t a. p r a h t a l d a n ss s o h e i n n r ci 1 i c KEY ORDS o t l s se ; u t d a n ss K h a l r W :c nr y t m f l— ig o i ; a n n f t ; o a i e
中 图分 类 号 :P 7 T21
文 献 标 志 码 : A
基于卡尔 曼滤波器 的控制系统 传感器故障诊 断
周永杰 王雨萌2张江滨2 , ,
( . 中市水 电设计 院 , 西 汉 中 7 3 0 ;. 1汉 陕 2 0 0 2 西安 理 工 大学 , 陕西 西安 7 0 4 ) 10 8
F aul—Dign ss o n I’ it o se Ba e I Ka m a le t a o i fSe SI SCO lr lSy t m s d 0I 》 l l n Fit r
基于Kalman滤波器的故障诊断方法及其在铁道车辆中的应用-铁科院

第 27 卷第 1 期 2007年1月 文章编号 : 1008- 7842 ( 2007) 01- 0009- 04
0 0 c1 0 0 0 0 k1 0 0
0 0 0 c1 0 0 0 0 k1 0
0 0 0 c1 0 ,
x [ k + 1] = e ATk x [ k ] + A- 1 ( e ATk - I ) Bu[ k] 其中 T k = tk + 1 - t k , 为采样时间间隔。令 A = e AT k
( c21 + c22)l 2 - c21l c22l 0 0 0 2k 2l k 2l 0 0
2
- c21l 2c1 + c21 0 0 0 - k2 - k 2l 2k1 + k 2 0 0 0
,
- k 2 - k 2l
,
10
铁道机车车辆
第 27 卷
^
0 0 c1 [ Cf ] = 0 0 0 0 k1 [ Kf] = 0 0
, zV z#V
A- 2 e- A t cos( t +
^
^
∃e
t 0
^
- At
^
cos( t +
^
) d t = ( I + A- 2) - 1 [- A- 1e- At cos( t + ) + ) + A- 1 cos( ) - A- 2 sin ( ) ] ( 13)
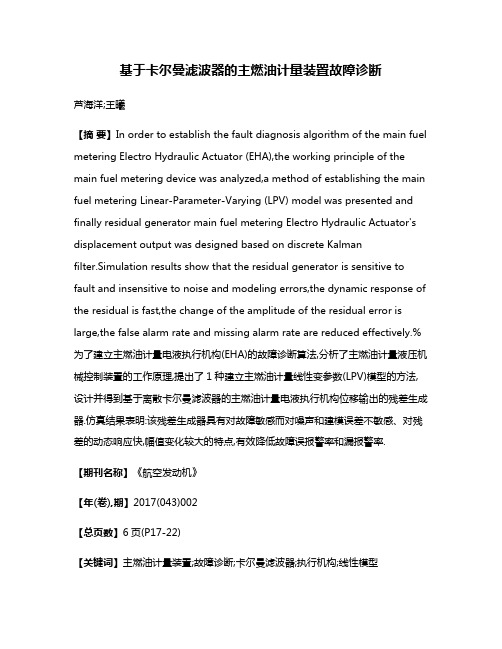
集员卡尔曼滤波器在电机故障诊断中的应用
第40卷第10期2023年10月控制理论与应用Control Theory&ApplicationsV ol.40No.10Oct.2023集员卡尔曼滤波器在电机故障诊断中的应用王振华,张文瀚,崔骞,沈毅†(哈尔滨工业大学航天学院,黑龙江哈尔滨150001)摘要:本文针对伺服电机提出了一种基于集员卡尔曼滤波器的故障诊断方法并进行了实际应用.首先,基于运动学关系和数据驱动技术构建了伺服电机的综合系统动态.之后,针对电机的位置–速度模型设计了一个中心对称多面体卡尔曼滤波器来检测位置传感器和速度传感器是否发生故障.同时,针对电机的力矩–速度模型设计了一个中心对称多面体卡尔曼滤波器来检测力矩执行器故障和速度传感器故障.然后,基于上述的两个中心对称多面体卡尔曼滤波器提出了一种故障隔离律,可以定位出伺服电机故障部件的位置.最后,通过一个实际的伺服电机实验平台对所提出方法进行了应用,并验证了其可行性与有效性.关键词:故障诊断;伺服电机;集员卡尔曼滤波器;中心对称多面体引用格式:王振华,张文瀚,崔骞,等.集员卡尔曼滤波器在电机故障诊断中的应用.控制理论与应用,2023, 40(10):1721–1729DOI:10.7641/CTA.2023.20649Application of set-membership Kalmanfilter in motor fault diagnosisWANG Zhen-hua,ZHANG Wen-han,CUI Qian,SHEN Yi†(School of Astronautics,Harbin Institute of Technology,Harbin Heilongjiang150001,China) Abstract:This paper proposes a fault diagnosis approach for servo motor based on set-membership Kalmanfilter and realizes the practical application.Firstly,the integrated dynamic system of servo motor is constructed via the kinematic relationship and data-driven techniques.A zonotopic Kalmanfilter is then designed for the motor position–velocity model to determine whether the position sensor and velocity sensor are faulty.Meanwhile,a zonotopic Kalmanfilter is synthesized for the motor torque–velocity model to detect the torque actuator fault and velocity sensor fault.After that,a fault isolation law is proposed with the aid of the presented two zonotopic Kalmanfilter,which can locate the faulty component of servo motor.Finally,the proposed approach is applied to a practical servo motor experimental platform,and its viability and validity are verified.Key words:fault diagnosis;servo motor;set-membership Kalmanfilter;zonotopeCitation:WANG Zhenhua,ZHANG Wenhan,CUI Qian,et al.Application of set-membership Kalmanfilter in motor fault diagnosis.Control Theory&Applications,2023,40(10):1721–17291引言在自动化科技高速发展的带动下,现代制造业的加工工艺日益复杂,使得多轴设备运动控制的应用日益广泛,大量用于工业机器人、雕刻机等设备控制中.伺服电机作为多轴设备运动控制的主要对象,更是在现代制造业得到了广泛应用[1–3].但是,伺服电机运行的环境往往复杂多变且电机自身会受到各种外部冲击的影响,这些不利因素可能会导致电机在运行过程中出现各种故障.一旦伺服电机发生故障,就会降低其准确性和可靠性甚至破坏运动系统的稳定性,从而造成严重的安全事故[4].为了保证系统的可靠性和安全性,需要研究伺服电机的故障诊断技术,快速准确的检测并隔离故障,为后续的容错控制提供基础.故障诊断技术在过去几十年中得到了国内外学者的广泛关注,特别在基于模型的故障诊断方法上研究的最为深入,涌现了很多研究成果[5–8].基于模型的故障诊断方法的主要思想是借助系统的数学模型和输入输出值来设计一个或一组观测器/滤波器,并通过观测器/滤波器生成的残差信号来实现系统故障的检测与隔离.基于这一思想,很多学者开始研究基于模型的伺服电机故障诊断方法.针对双电机同步驱动伺服系统执行器失效故障的特点,文献[9]提出了一种基于自适应滑模观测器的故障诊断方法.文献[10]设计了一种滑动窗故障检测观测器来检测永磁同步电机的收稿日期:2022−07−21;录用日期:2023−06−20.†通信作者.E-mail:************.cn;Tel.:+86451-86413411-8602.本文责任编委:张化光.国家自然科学基金项目(61973098,62033004)资助.Supported by the National Natural Science Foundation of China(61973098,62033004).1722控制理论与应用第40卷短路故障.针对变速永磁同步电机,文献[11]设计了一种差动电流观测器,可以生成故障残差征兆来实现快速故障诊断.但是上述方法仅实现了对电机的故障检测,没有实现故障隔离,无法确定故障部件的具体位置.事实上,目前针对伺服电机的故障隔离仍然是基于模型的故障诊断的一个难题,这方面的研究成果较少.针对双三相永磁同步电动机,文献[12]利用基于电流模型和电压模型的定子磁链观测器实现了对电机5类故障的检测与隔离.通过将比例全维观测器和扰动观测器结合,文献[13]提出了一种针对永磁同步电机电流传感器和位置传感器的故障诊断机制.另一方面,基于模型的故障诊断方法往往需要较高精度的系统模型和输入输出信号来提供令人满意的诊断结果.但是,实际工程中无法避免的建模不确定性、过程扰动和测量噪声等未知因素都会降低故障诊断性能.为了解决这一问题,传统基于模型的故障诊断方法大部分都假设未知扰动和测量噪声符合一定的概率分布[14–17].然而,很多实际系统关于噪声和干扰的概率分布的先验知识一般很难得到[18].针对该问题,近些年来很多学者开始采用集员估计技术来进行基于模型的故障诊断.集员估计技术只假设系统的干扰和噪声是未知但有界的,这提高了更宽松和实际的假设[19].集员估计的主要思想是利用特殊的几何体如平行多面体、中心对称多面体、椭球等来包含系统每一时刻的所有可能状态,并在此基础上得到故障诊断残差和包含所有无故障残差可能值的阈值集合,再通过判断残差是否被该阈值集合包含来进行故障诊断[20].在现有的几何体中,中心对称多面体由于其求取线性映射和闵可夫斯基之和的简便性受到了学者们的关注,涌现了很多基于中心对称多面体的故障诊断方法.通过将高斯不确定性和未知有界不确定性相结合,文献[21]提出了一种扩展中心对称多面体和高斯卡尔曼滤波器来实现非线性系统的故障检测.文献[22]提出了一种约束中心对称多面体技术,并将其应用到了直流电机的故障检测上.文献[23]结合中心对称多面体和多目标观测设计方法解决了线性时不变系统的执行器故障检测问题.通过设计一个中心对称多面体观测器并借助辅助信号注入技术,文献[24]实现了对参数不确定性系统的主动式故障检测,并应用到了电机控制系统上.虽然文献中有很多基于中心对称多面体的故障诊断方法,但大都集中在故障检测上,基于中心对称多面体的故障隔离方法的研究并不太多.特别地,基于中心对称多面体的伺服电机故障检测和隔离方面的研究还不深入,这仍是一个值得研究的有趣问题.基于上述讨论,本文针对伺服电机设计了一种利用集员卡尔曼滤波器进行故障诊断的方法并进行了实际应用.首先,构建出伺服电机的综合动态模型;然后,针对电机的位置–速度模型和力矩–速度模型各设计一个中心对称多面体卡尔曼滤波器来实现对力矩执行器、位置传感器和速度传感器的故障检测;最后,考虑到所设计的两个中心对称多面体卡尔曼滤波器在上述3种故障下会呈现出不同的诊断信号,本文进一步提出了一种故障隔离律,可以定位出伺服电机故障部件的位置.本文所设计的故障检测和隔离方法不需要增加额外的硬件,计算量需求小,易于实际伺服电机系统实现.2符号说明与相关概念符号说明:R n和R n×m分别表示n维欧氏空间及n×m维矩阵构成的集合.I n表示n维的单位矩阵,0表示具有适当维数的零向量或零矩阵.给定向量ζ∈R n,¯ζ∈R n和ζ∈R n分别表示向量ζ的上界与下界.给定矩阵M∈R n×m,M T和M(i,j)分别代表矩阵M的转置及其第i行第j列的元素.给定方阵N∈R n×n,tr(N)表示矩阵N的迹.定义1[25]对于两个集合X和Y,它们的闵科夫斯基之和运算定义如下:X⊕Y={x+y:x∈X,y∈Y},(1)其中⊕表示闵科夫斯基和运算符号.定义2[25]一个n维空间中的m阶中心对称多面体Z是超立方体B m=[−1+1]m的仿射变换,即Z=⟨p,H⟩=p⊕H B m={p+Hz,z∈B m},(2)其中:向量p∈R n称为Z的中心,H∈R n×s称为Z的形状生成矩阵.定义3[26]给定n维欧氏空间中的一个矩阵H∈R n×m,则它的Frobenius范数定义如下:∥H∥F=(tr(H T H))12.(3)性质1[27]对于n维欧氏空间中的中心对称多面体,其存在如下的集合运算性质:⟨p1,H1⟩⊕⟨p2,H2⟩=⟨p1+p2,[H1H2]⟩,(4) L⟨p,H⟩=⟨Lp,LH⟩,(5)⟨p,H⟩⊆⟨p,Rs(H)⟩,(6)其中:p,p1和p2为给定的中心向量,H,H1和H2为给定的形状生成矩阵,Rs(H)为如下形式的对角矩阵:Rs(H)=diag{m∑j=1|H(1,j)|,···,m∑j=1|H(n,j)|}.性质2[28]给定n维欧氏空间中适当维数的矩阵X,A和B,则有如下矩阵迹的性质成立:tr(A)=tr(A T),(7a)∂(tr(AX T B))∂X=BA,(7b)∂(tr(AX T XA T))∂X=2XA T A.(7c)第10期王振华等:集员卡尔曼滤波器在电机故障诊断中的应用17233伺服电机实验平台本文的目的是实现对伺服电机的故障诊断和实际应用.为此,笔者搭建了一个如图1所示伺服电机实验平台,实验平台主要包括一个电脑上位机、一个ARM 微处理器、一个CANBus 模块、一台伺服电机及其配套的伺服系统.图1伺服电机实验平台Fig.1The servo motor experimental platform伺服电机实验平台的结构如图2所示.在该实验平台中,电脑上位机可以通过TCP/IP 协议从ARM 微处理器中接受电机数据并将控制指令发送给ARM 微处理器.CANBus 模块则是用于在电机伺服系统和ARM 微处理器传输实时测量的电机状态数据,如力矩、位置和速度等.同时,电机伺服系统会依据给定的控制指令驱动电机完成相对应的运动操作.特别地,电脑上位机上还配置有基于Qt 开发的软件界面,可实时的显示伺服电机的实时数据并展示故障诊断结果.在对伺服电机进行故障诊断前,需要先构建出伺服电机的数学模型.根据运动学关系,伺服电机的位置和速度可建模为如下的离散时间形式:S k +1=S k +V k T s ,(8)其中:T s 为电机伺服系统的数据采样时间,本平台中电机的数据采样时间为0.005s;S k (m)为电机的位置;V k (m/s)为电机的速度.另一方面,根据牛顿定律可知,伺服电机力矩和速度之间的关系可建模为如下离散时间形式:V k +1=V k +T s J −1T k ,(9)其中:T k (N ·m )为电机的控制力矩,J (N ·s 2)为一个与电机转动惯量相关的常数.考虑到电机的转轴受到粘滞阻力的影响且粘滞阻力与电机速度相关,这使得控制力矩T k 和电机速度V k 无法满足式(9)中的线性关系.为了解决这一问题,本文考虑采用数据驱动方法来构建伺服电机的力矩–速度模型.考虑控制力矩T k 和电机速度V k 满足如下形式的回归关系:V k +1=ξ1V k +ξ2V k T k +ξ3T k ,(10)其中ξ1,ξ2和ξ3为待确定的回归系数.在采集到足够的电机力矩和速度数据后,式(10)可改写为如下形式:V 1V 2...=ξ1 V 0V 1...+ξ2 V 0T 0V 1T 1... +ξ3 T 0T 1... ,(11)基于式(11),回归系数可利用最小二乘辨识方法确定.基于伺服电机的位置–速度模型和力矩–速度模型并考虑未知的不确定干扰,则可得到如下形式的综合电机系统动态:{S k +1=S k +V k T s +w s ,k ,V k +1=AV k +B k T k +w v,k ,(12)其中:A =ξ1,B k =ξ2V k +ξ3,w s ,k 和w v,k 为系统(12)中的未知的不确定干扰.需要说的是,伺服电机的实际位置和速度是通过其伺服系统的位置传感器和速度传感器测量得到的,故输出数据会受到测量噪声的影响,则得到如下形式的伺服电机测量输出动态:{S m k =S k +v s ,k ,V m k =V k +v v,k ,(13)其中:S mk 和V m k 分别表示位置和速度的测量值,v s ,k 和v v,k 为位置传感器和速度传感器的未知测量噪声.虽然无法确定出伺服电机中未知扰动和测量噪声的准确值,但通过采集的伺服电机实际数据分析可知未知扰动和测量噪声满足未知有界条件且可估计出位置初值,速度初值,未知扰动和测量噪声的上下边界.特别地,基于得到的上下边界可确定出如下的中心对称多面体假设:S 0∈S 0=⟨p s 0,H s 0⟩,V 0∈V 0=⟨p v 0,H v0⟩,(14a)w s ,k ∈W s =⟨0,H s w ⟩,w v,k ∈W v =⟨0,H v w ⟩,(14b)v s ,k ∈V s =⟨0,H s v ⟩,v v,k ∈V v =⟨0,H v v ⟩,(14c)其中p s 0,p v 0,H s 0,H v 0,H s w ,H v w ,H s v 和H vv 为给定的适当维数的向量和矩阵.从动态(12)–(13)可以看出,所搭建平台中的伺服电机配置有一个力矩控制器、一个位置传感器和一个速度传感器.考虑到两个或者两个以上部件同时发生故障的概率很小,因此本文考虑伺服电机每次只有一个部件发生故障.在这样的单一故障假设下,本文设计了一种基于集员技术的双中心对称多面体卡尔曼滤波器故障诊断方法.首先,针对伺服电机的位置–速度模型设计一个中心对称多面体卡尔曼滤波器来检测位置传感器和速度传感器是否发生故障.然后,针对伺服电机的力矩–速度模型设计一个中心对称多面体卡尔曼滤波器来检测力矩控制器和速度传感器是否发生故障.最后,基于上述的两个中心对称多面体卡尔曼滤波器,提出了一种故障隔离律,可以准确定位出伺服电机故障部件的位置.1724控制理论与应用第40卷图2伺服电机实验平台的结构Fig.2Framework of the servo motor experimental platform4双中心对称多面体卡尔曼滤波器故障诊断4.1基于位置–速度模型的中心对称多面体卡尔曼滤波器基于式(12)–(13)可得到如下的电机位置–速度模型:{S k +1=S k +V m k T s +w s ,k ,S m k =S k +v s ,k .(15)基于电机的位置–速度模型(15),本文采用中心对称多面体卡尔曼滤波器来对电机位置进行集员估计并在此基础上进行故障诊断.中心对称多面体卡尔曼滤波器的主要思想可借助图3中的示意图来进行解释.首先,由模型(15)中的位置传播方程确定一个包含S k 的中心对称多面体S k |k −1;之后,由模型(15)中的位置测量方程确定一个包含S k 的条带S k .因为S k ∈S k |k −1和S k ∈S k 同时成立,故S k 属于S k |k −1和S k 的交集S k |k −1∩S k .考虑计算这个交集的准确形式较为困难,故选择使用一个中心对称多面体S k 来包含交集S k |k −1∩S k .通过逐步迭代计算S k ,可以得到对S k 的集员估计.特别地,基于得到的S k 的集员估计还可以检测位置传感器和速度传感器是否发生故障.图3中心对称多面体卡尔曼滤波器主要思想Fig.3The main idea of zonotopic Kalman filter为了实现基于位置–速度模型的中心对称多面体卡尔曼滤波器,本文提出如下的定理.定理1给定中心对称多面体S 0∈S 0,ˆS0=p s 0,w s ,k ∈W s ,v s ,k ∈V s ,则伺服电机的位置S k 可被中心对称多面体S k 包含,即S k ∈S k =⟨ˆS k ,H s k⟩,且S k 的中心和形状矩阵可由如下等式得到:ˆS k |k −1=ˆS k −1+V m kT s ,(16a)H s k |k −1=[H s k −1H s w ],(16b)ˆS k =ˆS k |k −1+Λ∗k (S m k −ˆS k |k −1),(16c)H s k =[(I 1−Λ∗k )H s k |k −1Λ∗k H sv ],(16d)Λ∗k=H s k |k −1(H s k |k −1)TH s k |k −1(H s k |k −1)T +H s v (H s v )T ,(16e)其中:ˆS k 为伺服电机位置S k 的估计值,Λ∗k ∈R1×1为滤波器的增益矩阵.证根据ˆS 0=p s 0和S 0∈S 0可以得到S 0∈S 0=⟨ˆS 0,H s 0⟩,再由w s ,k ∈W s 和模型(15)中的位置传播方程可得S k =S k −1+V m k −1T s +w s ,k −1∈S k −1⊕V m k −1T s ⊕W s =S k |k −1.(17)根据性质1可以得到S k ∈S k |k −1=⟨ˆS k |k −1,H s k |k −1⟩,(18)其中:ˆS k |k −1=ˆS k −1+V m k T s ,H s k |k −1=[H s k −1H s w ],则可得证式(16a)–(16b).根据v s ,k ∈V s 和模型(15)中的位置测量方程可知S k 可被一个条带S k 包含,S k 的形式如下:S k ={S k ∈R 1:|S k −S m k | H sv }.(19)因为S k ∈S k |k −1和S k ∈S k 同时成立,故可知S k 属于两者的交集S k |k −1∩S k .基于S k ∈S k |k −1和中心对称多面体的定义可知存在一个向量b s ∈B 1使得S k =ˆS k |k −1+H s k |k −1b s ,则可得到如下等式:S k =ˆS k |k −1+Λk H s k |k −1b s +(I 1−Λk )H s k |k −1b s ,(20)其中Λk ∈R 1×1为待选择的滤波器增益矩阵.同时,根据S k ∈S k 可知存在向量δs ∈B 1使得下式成立:S k −S m k =H sv δs ,(21)则可得ˆS k |k −1+H s k |k −1b s −S m k =H s v δs ,整理后得H s k |k −1b s =S m k +H s v δs −ˆS k |k −1,(22)将式(22)代入到式(20)中可得S k ∈S k |k −1∩S k 且有S k =ˆS k |k −1+Λk (S m k +H s vδs −ˆS k |k −1)+第10期王振华等:集员卡尔曼滤波器在电机故障诊断中的应用1725(I 1−Λk )H s k |k −1b s =ˆS (Λk )+H s (Λk )[b s δs]∈S (Λk )=⟨ˆS(Λk ),H s (Λk )⟩,其中:ˆS(Λk )和H s (Λk )的具体形式如下:ˆS(Λk )=ˆS k |k −1+Λk (S mk−ˆSk |k −1),H s (Λk )=[(I 1−Λk )H s k |k −1Λk H sv ],由此便得到了一个包含交集S k |k −1∩S k 的中心对称多面体S (Λk ).需要说明的是,不同的矩阵Λk 会产生不同形状和体积的中心对称多面体S (Λk ).为了保证交集包含性能的精度,本文选择最小化S (Λk )生成矩阵H s (Λk )的Frobenius 范数来优化求取矩阵Λk ,该方法所需的计算量较小,实时性较好.为了最小化生成矩阵H s (Λk )的Frobenius 范数,将其改写为如下形式:H s (Λk )=Ξk +Λk ΠTk ,(23)其中:Ξk =[H s k |k −10],ΠT k =[−H s k |k −1H sv ].根据定义3,矩阵H s (Λk )的Frobenius 范数可计算如下:∥H s (Λk )∥F =∥Ξk +Λk ΠTk ∥F =(tr((ΞT k +Πk ΛT k )(Ξk +Λk ΠT k )))12.为了最小化生成矩阵H s (Λk )的Frobenius 范数,本文选择将∥H s (Λk )∥2F 对Λk 求偏导,则利用性质2可得到如下形式的偏导数:∂(∥H s (Λk )∥2F )∂Λk =2Λk ΠTk Πk +2Ξk Πk .(24)令式(24)为零,则可求得最小化∥H s (Λk )∥F 的Λ∗k 如下:Λ∗k =−Ξk ΠkΠT k Πk =H s k |k −1(H s k |k −1)T H s k |k −1(H s k |k −1)T +H s v (H s v )T ,由此得证式(16e).令ˆS k =ˆS (Λ∗k )和H s k =H s (Λ∗k),则可得证式(16c)–(16d).证毕.注1在中心对称多面体卡尔曼滤波器的运行过程中,生成矩阵ˆSk |k −1的维数会不断增加,使得中心对称多面体S k |k −1=⟨ˆS k |k −1,H s k |k −1⟩的阶数不断上升,造成计算量的不断增大,不利于工程应用.为此,本文采用文献[29]中的降阶方法对S k |k −1进行处理,降阶方法具体过程如下:给定中心对称多面体Z =⟨p,H ⟩⊂R n ,H ∈R n ×m ,将矩阵H 的每一列按照其欧式范数的大小降序排列得到新的矩阵⃗H,则存在如下包含关系成立:Z =⟨p,H ⟩⊂⟨p,↓re (H )⟩,其中:⟨p,↓re (H )⟩为包含Z 的一个低阶中心对称多面体,矩阵↓re (H )=[¯HRs(˜H )]∈R n ×q ,1 q m 为降阶后的阶数,¯H为⃗H 的前q −1列组成的矩阵,˜H 是由⃗H 的第q 列到第m 列组成的矩阵.为了更好的理解文献[29]中的降阶方法,本文给出了一个高阶中心对称多面体降阶为低阶中心对称多面体的例子.考虑一个高阶中心对称多面体⟨p,H ⟩,其中心p 和形状生成矩阵H 形式如下:p =[0.51],H =[0.20.30.40.50.10.20.30.50.40.10.10.60.80.2].同时,选择降阶后的阶数q =5,则采用文献[29]中的降阶方法可得到低阶中心对称多面体⟨p,↓re (H )⟩的中心p 和形状生成矩阵↓re (H )形式如下:p =[0.51],↓re (H )=[0.20.10.21.500.80.60.500.8],由此可得图4中的中心对称多面体降阶仿真结果.从图4中可看出,低阶中心对称多面体⟨p,↓re (H )⟩能够包含住高阶中心对称多面体⟨p,H ⟩,且生成矩阵的阶数更低,有助于降低后续运算过程中的计算量,证明了降阶方法的有效性.图4一个中心对称多面体及其降阶中心对称多面体Fig.4A zonotope and its reduced order zonotope基于定理1中的位置集员状态估计算法,本文给出如下形式的残差生成公式:r s k =S m k −ˆSk ,(25)其中r sk 为基于位置–速度模型的中心对称多面体卡尔曼滤波器生成的故障检测残差.根据S k ∈S k ,v s ,k ∈V s ,位置–速度模型(15)和残差公式(25)以及中心对称多面体的性质1可知r s k =S m k −ˆSk =S k +v s ,k −ˆS k ∈S k −ˆS k ⊕V s =R s k =⟨0,R s k ⟩,(26)其中R sk=[H s k H s v ].从上式可以看出,在位置传感器和速度传感器均无故障的时候,残差r sk 应当被中心对称多面体R s k 包含;若残差r sk 不被R s k 包含,则说明此时位置传感器或速度传感器发生故障,由此可以得到如下的故障检测逻辑:{r sk ∈R s k ,正常,r sk ∈R s k ,故障.(27)特别地,考虑到R s k 的生成矩阵R sk 的行数为1,因此故障检测逻辑(27)可通过求解如下的无优化目标的线性规划问题来进行实现:R s k z =r s k ,z ∈B l s ,(28)其中l s 为矩阵R sk 的列数.如果上述无优化目标的线性规划问题(28)可解,则说明r sk ∈R s k ,即系统正常;反1726控制理论与应用第40卷之,则说明r sk∈R s k,即系统故障.虽然故障检测逻辑(27)可通过求解式(28)来实现,但是其需要实时求解无优化目标的线性规划问题,算法实现过程复杂,不利于故障检测算法的工程应用.为此,本文选择先计算包含中心对称多面体R sk的区间盒子,然后判断残差r sk是否被区间盒子包含来检测故障.根据定义2和性质1可以得到如下的中心对称多面体区间求取公式:¯r sk=l s∑j=1|R s k(1,j)|,r sk=−l s∑j=1|R s k(1,j)|.(29)在得到中心对称多面体R sk的区间盒子后,可以得到如下的故障检测逻辑:{r sk∈[r s k,¯r s k],正常,r sk∈[r s k,¯r s k],故障,(30)可以看到,与实时求解式(28)相比,上述基于区间盒子的故障检测逻辑更加简单,有效简化了故障检测过程.综合上述诊断过程可知,基于位置–速度模型的中心对称多面体卡尔曼滤波器能够检测电机的位置传感器和速度传感器是否发生故障.4.2基于力矩–速度模型的中心对称多面体卡尔曼滤波器基于式(12)–(13)可得到如下的电机力矩–速度模型:{V k+1=AV k+B k T k+w v,k,V m k =V k+v v,k.(31)基于模型(31),本文采用中心对称多面体卡尔曼滤波器来对电机速度进行集员估计并进而实现故障诊断.为了实现基于力矩–速度模型的中心对称多面体卡尔曼滤波器,本文提出如下的定理.定理2给定中心对称多面体V0∈V0,ˆV0=p v0, w v,k∈W v,v v,k∈V v,则伺服电机的速度V k可被中心对称多面体V k包含,即V k∈V k=⟨ˆV k,H v k⟩,且V k 的中心和形状矩阵可由如下等式得到:ˆVk|k−1=AˆV k−1+ˆB k−1T k−1,(32a)H vk|k−1=[AH vk−1H vw],(32b)ˆV k =ˆV k|k−1+Γ∗k(V mk−ˆV k|k−1),(32c)H vk=[(I1−Γ∗k)H v k|k−1Γ∗k H v v],(32d)Γ∗k =H vk|k−1(H vk|k−1)TH vk|k−1(H vk|k−1)T+H vv(H vv)T,(32e)其中:ˆB k−1=ξ2ˆV k−1+ξ3,ˆV k为伺服电机速度V k的估计值,Γ∗k∈R1×1为滤波器的增益矩阵.证定理2的证明过程同定理1,此处不再重复证明.同时,注1中的降阶方法在定理2中同样适用,有助于降低伺服电机速度集员估计的计算量.证毕.基于定理2中的速度集员状态估计算法,本文给出如下形式的残差生成公式:r vk=V mk−ˆV k,(33)其中r vk为基于力矩–速度模型的中心对称多面体卡尔曼滤波器生成的故障检测残差.根据V k∈V k,v v,k∈V v,力矩–速度模型(31)和残差公式(33)以及中心对称多面体的性质1可知r vk=V mk−ˆV k=V k+v v,k−ˆV k∈V k−ˆV k⊕V v=R v k=⟨0,R v k⟩,(34)其中R vk=[H vkH vv].从上式可看出,在力矩执行器和速度传感器均无故障的时候,残差r vk应当被中心对称多面体R vk包含;若残差r vk不被R vk包含,则说明此时力矩执行器或速度传感器发生故障,由此可以得到如下的故障检测逻辑:{r vk∈R v k,正常,r vk∈R v k,故障.(35)上述中心对称多面体包含关系判断同样可采用区间盒子来进行简化代替,由此得到如下的故障检测逻辑:{r vk∈[r v k,¯r v k],正常,r vk∈[r v k,¯r v k],故障,(36)其中¯r vk和r vk可由如下等式计算:¯r sk=l v∑j=1|R v k(1,j)|,r sk=−l v∑j=1|R v k(1,j)|,(37)其中l v为矩阵R vk的列数.综合上述诊断过程可知,基于力矩–速度模型的中心对称多面体卡尔曼滤波器能够检测电机的力矩执行器和速度传感器是否故障. 4.3基于双中心对称多面体卡尔曼滤波器的故障隔离基于力矩–速度模型的中心对称多面体卡尔曼滤波器能够检测电机的力矩执行器和速度传感器是否发生故障,基于位置–速度模型的中心对称多面体卡尔曼滤波器能够检测电机的位置传感器和速度传感器是否发生故障.然而,所设计的两个中心对称多面体卡尔曼滤波器都无法独立实现故障隔离.注意到位置传感器故障只会使位置–速度模型的中心对称多面体卡尔曼滤波器报警,力矩执行器故障只会使力矩–速度模型的中心对称多面体卡尔曼滤波器报警,而速度传感器故障会使这两个中心对称多面体卡尔曼滤波器都报警,故这两个中心对称多面体卡尔曼滤波器可以联合起来实现对伺服电机组件的故第10期王振华等:集员卡尔曼滤波器在电机故障诊断中的应用1727障隔离.特别地,基于双中心对称多面体卡尔曼滤波器的伺服电机故障隔离律如表1所示.基于设计的两个中心对称多面体卡尔曼滤波器和表1中的故障隔离律便可实现对伺服电机力矩执行器、位置传感器和速度传感器的故障隔离和定位.表1伺服电机故障隔离律Table 1Fault isolation law of servo motor故障类型式(30)诊断结果式(36)诊断结果伺服电机无故障正常正常力矩执行器故障正常故障位置传感器故障故障正常速度传感器故障故障故障5伺服电机实验平台应用与验证结果本实验平台中,基于采集的电机控制力矩和速度数据及最小二乘参数辨识方法可确定出模型(11)中的回归系数为ξ1=0.9765,ξ2=0.1877和ξ3=0.0239.基于相同的控制力矩,伺服电机的实际测量速度和基于回归模型(10)得到仿真计算速度的对比结果如图5所示.从图5中可看出,式(10)中的回归模型能够准确的描述电机控制力矩T k 和电机速度V k 之间的动态关系.图5实际测量速度和模型仿真速度的对比结果Fig.5Comparison results of actual measured velocity andmodel simulation velocity在得到伺服电机的回归模型后,本文将分别考虑表1中的4种情况来对所提出的故障诊断方法进行应用与验证.实验过程中,将不同类型的故障注入到电机实验平台中,并通过电脑上位机上的Qt 软件进行诊断结果的展示.诊断算法仿真中,设置p s 0和p v0为电机伺服系统采集到的第1个位置和速度数据且令H s 0=1×10−5,H v=1×10−3,H s w =5×10−8,H vw=1×10−4,H s v =1×10−5和H v v =2×10−3.为了降低计算量,仿真中设置中心对称多面体降阶的阶数为q =20.首先考虑伺服电机无故障的情况,由此可得到如图6所示的双中心对称多面体卡尔曼滤波器故障诊断结果.从图6中可以看出,所设计的两个滤波器均没有检测到故障,说明此时伺服电机未发生故障,所设计的故障诊断方法不会产生虚警的情况.(a)电机位置–速度模型的诊断结果(b)电机力矩–速度模型的诊断结果图6伺服电机无故障的诊断结果Fig.6Diagnosis results of servo motor withoutfault(a)电机位置–速度模型的诊断结果(b)电机力矩–速度模型的诊断结果图7力矩执行器故障的诊断结果Fig.7Diagnosis results of torque actuator fault。
基于卡尔曼滤波器组的航空发动机传感器故障诊断
基于卡尔曼滤波器组的航空发动机传感器故障诊断赵文博;叶志锋;王继强【摘要】在发动机线性模型基础上,结合卡尔曼滤波理论,设计了基于一组卡尔曼滤波器的发动机传感器故障诊断系统,实现了在发动机稳态或动态情况下,对单一或多重传感器突变及漂移故障的检测,并应用故障诊断方法进行仿真试验.仿真结果表明,应用基于卡尔曼滤波器组的故障诊断方法可以及时、准确地对传感器软硬故障进行检测及诊断,验证了所设计的容错效果.%Based on the nonlinear aero-engine model and according to the theory of Kalman filtering,this article designs an aeroengine fault tolerant control system on account of a bank of Kalman filters to realize the goal of single or multiple step or drift sensor fault ing this method,the simulation experiment is done on certain aero-engine model.The simulation results show that this method can be used to detect sensor fault fast and accurately and the validity of the method is identified【期刊名称】《机械制造与自动化》【年(卷),期】2013(042)003【总页数】5页(P14-17,53)【关键词】发动机;卡尔曼滤波器;传感器故障诊断;故障容错【作者】赵文博;叶志锋;王继强【作者单位】南京航空航天大学能源与动力学院,江苏南京210016;南京航空航天大学能源与动力学院,江苏南京210016;南京航空航天大学能源与动力学院,江苏南京210016【正文语种】中文【中图分类】TH165+.3;V247.1伴随FADEC(全权限数字电子控制)系统的深入发展,大量电子元件、执行机构以及传感器等在航空发动机上的广泛应用对发动机可靠性提出更高的要求,特别是发动机传感器大多工作在高温、高压、强振动等恶劣的工作环境中,传感器故障的及时诊断在业界也越来越引起广泛重视。
基于双重卡尔曼滤波器的发动机故障诊断

基于双重卡尔曼滤波器的发动机故障诊断
张鹏;黄金泉
【期刊名称】《航空动力学报》
【年(卷),期】2008(23)5
【摘要】提出了一种基于双重卡尔曼滤波器的航空发动机健康参数估计方法,实现了传感器发生故障情况下发动机故障的准确诊断.采用发动机动态工作点的测量数据,解决了可测量参数偏少导致故障诊断困难的问题;球面采样平方根
UKF(Unscented Kalman filter)故障诊断滤波器具有更好的滤波稳定性与更低的计算量的要求,提高了故障诊断算法的效率与精度.某型双轴涡扇发动机故障诊断仿真结果表明,该方法可以准确的同步实现气路部件与传感器的故障诊断,是一种有效的航空发动机故障诊断方法.
【总页数】5页(P952-956)
【关键词】航空、航天推进系统;航空发动机;故障诊断;卡尔曼滤波器;非线性估计【作者】张鹏;黄金泉
【作者单位】南京航空航天大学能源与动力学院
【正文语种】中文
【中图分类】V233.7
【相关文献】
1.基于双重卡尔曼滤波器电池荷电状态的估计 [J], 商高高;朱晨阳
2.基于支持向量机和卡尔曼滤波器的航空发动机故障诊断研究 [J], 俞刚;黄金泉
3.基于卡尔曼滤波器组的航空发动机传感器故障诊断 [J], 赵文博;叶志锋;王继强
4.基于双重卡尔曼滤波器电池荷电状态的估计 [J], 商高高;朱晨阳;
5.基于卡尔曼滤波器及神经网络的发动机故障诊断 [J], 姚华;单贵平;孙健国
因版权原因,仅展示原文概要,查看原文内容请购买。
基于卡尔曼滤波的GPS导航系统故障检测
Vo. 8 u (I 13 S p I)
No v. 2 o 08
基 于 卡 尔 曼滤 波 的 G S导 航 系统 故 障检 测 P
刘剑慰 姜 斌
( 京 航 空 航 天 大 学 自动化 学 院 , 京 2 0 1 ) 南 南 1o 6
摘要 :提 出 了一种将 卡 尔曼滤 波器 与神经 网络 相结 合 的 导航 系 统故 障检 测 结构 . 对 G S 系统 针 P 的非线 性特 点 , 用扩 展卡 尔 曼滤波 推算状 态 的预 测值 , 与实 际观 测 值进 行 比较得 到 残 差 , 利 并 同 时采用 Ema l n网络 构成 时延 神 经 网络 , 用 残 差 的 当前 值 及 前 多个 历 元 的 历 史值 进 行 故 障检 利 测 . 后 , 算机 仿真验 证表 明, x 方检 测方 法 比较 , 结构 不但 可 以快速检 测 出系统 故 障 , 最 计 与 卡 该
p e c i n a a u e n a bti e r dito nd me s r me tc n beo a n d.A i — ea e r ln t r sc n tu td b s d o n tme d l y n u a ewo k i o sr c e a e n a El n n t k,wh c k s u e o h ro n t so y v le t e f r ful d tc i n Th ma e wor ih ma e s f t e er r a d ishit r a u o p ro m a t e e to . e smu ai n r s ls s ow a o a e t ,t r o e l o t msc n d tc h a l fGPS, i lto e u t h h t tc mp r d wi h he p op s d ag r h a ee tt e f u to i a d h v x e ln a l t l r n e p ro ma c s a tf u ti e tf i g a d io a n b lt n a e e c le tf u t o e a c e f r n e ,f s a l d n iy n n s l t g a ii i y.
基于扩展卡尔曼滤波器的微型燃气轮机传感器故障诊断与硬件在环验证

航Байду номын сангаас发动机
Aeroengine
Vol. 46 No. 2 Apr. 2020
基于扩展卡尔曼滤波器的微型燃气轮机传感器 故障诊断与硬件在环验证
任雅浩,金崇文,王继强,胡忠志
(南京航空航天大学 能源与动力学院,南京 210016)
摘要:为了解决微型燃气轮机在变工况条件下的传感器信号故障诊断问题,提出了基于 1 簇卡尔曼滤波器的故障诊断方法。
Key words: microturbine曰a bank-of-Kalman-filter曰Fault Diagnosis and Isolation渊FDI冤曰hardware-in-the-loop verification曰aeroengine
0 引言
随 着 微 网 中 小 型 分 布 式 冷 热 电 联 产(Combined Cooling Heating and Power,CCHP)技术在全球范围内 的广泛应用,微型燃气轮机在微网中的作用日益凸显 [1-2]。分布式发电系统往往需要在无人值守的情况下长 时间稳定运行,控制系统的故障会直接影响系统的稳 定,可能导致系统的急停甚至造成严重后果。因此对 微型燃气轮机控制系统进行参数测量和状态监控的
该方法基于 V 字研发流程,使用基于模型的设计方法开发了 Simulink 微型燃气轮机部件级仿真模型,设计了变负载条件下的传感
器故障诊断与隔离系统。基于全数字仿真平台和硬件在环仿真平台对模型以及故障诊断与隔离系统进行集成验证。结果表明:基于
MBD 方法的全数字仿真及硬件在环仿真具有很高的一致性,能够快速实现模型转换及验证,为微型燃气轮机控制算法开发与硬件
引用格式:
基于混合卡尔曼滤波器组故障传感器定位方法
基于混合卡尔曼滤波器组故障传感器定位方法梁红1,靳成学2(1.中国核电工程有限公司郑州分公司,郑州450052;2.中国船舶重工集团公司第七一三研究所,郑州450015)航空发动机Aeroengine收稿日期:2018-03-15作者简介:梁红(1979),女,硕士,高级工程师,主要从事机电设备研究、仿真分析等工作;E-mail:lianghong@。
摘要:为了在发动机性能蜕化与传感器故障并存的情况下实现故障传感器的定位与部件蜕化情况的估计,并实现故障诊断基准数据的修正,构建了1种包含了机载模型与线性卡尔曼滤波器的组合结构混合卡尔曼滤波器组。
该卡尔曼滤波器组能够在之前所描述的故障/蜕化耦合情况下定位故障传感器,并得到较为准确的部件蜕化估计结果。
为了验证了混合卡尔曼滤波器组的有效性,进行了相关仿真。
仿真结果表明:混合卡尔曼滤波器组能够在发动机动态过程中遭遇传感器故障与部件蜕化并存的情况下完成故障定位与蜕化估计。
关键词:传感器;故障;蜕化;过渡态;混合卡尔曼滤波器;滤波器组;航空发动机中图分类号:V233.7文献标识码:Adoi:10.13477/ki.aeroengine.2019.02.013Sensor Fault Location Based on Bank of Hybrid Kalman FiltersLIANG Hong 1,JIN Cheng-xue 2(1.Zhengzhou Branch ,China Nuclear Power Engineering Co.,Ltd ,Zhengzhou 450052,China ;2.Seventh Thirteen Institute of China Shipbuilding Industry Corporation ,Zhengzhou 450015,China )Abstract:In order to realize the estimation of sensor fault location and component degradation during the coexisting of sensor fault and component degradation ,and to correct the datum data of fault diagnosis ,a bank of hybrid Kalman filters was constructed.The bank of hybrid Kalman filters was a combined structure of on-board engine model and linear Kalman filter.The bank of Kalman filter could locate the sensor fault in the case of fault /degradation coupling described previously and get a more accurate result of component degradationestimation.In order to verify the validity of the bank of hybrid Kalman filters ,the relevant simulation was carried out.From the simulation results ,it can be seen that the bank of hybrid Kalman filters can complete fault location and degradation estimation when the sensor faultand component degradation coexist during the dynamic process of the engine.Key words:sensor ;fault ;degradation ;transition state ;hybrid Kalman filter ;bank of filters ;aeroengine0引言对于传感器故障诊断问题,传统方法是采用降维卡尔曼滤波器组[1-5]来解决。
基于卡尔曼滤波器的主燃油计量装置故障诊断
基于卡尔曼滤波器的主燃油计量装置故障诊断芦海洋;王曦【摘要】In order to establish the fault diagnosis algorithm of the main fuel metering Electro Hydraulic Actuator (EHA),the working principle of the main fuel metering device was analyzed,a method of establishing the main fuel metering Linear-Parameter-Varying (LPV) model was presented and finally residual generator main fuel metering Electro Hydraulic Actuator's displacement output was designed based on discrete Kalmanfilter.Simulation results show that the residual generator is sensitive to fault and insensitive to noise and modeling errors,the dynamic response of the residual is fast,the change of the amplitude of the residual error is large,the false alarm rate and missing alarm rate are reduced effectively.%为了建立主燃油计量电液执行机构(EHA)的故障诊断算法,分析了主燃油计量液压机械控制装置的工作原理,提出了1种建立主燃油计量线性变参数(LPV)模型的方法,设计并得到基于离散卡尔曼滤波器的主燃油计量电液执行机构位移输出的残差生成器.仿真结果表明:该残差生成器具有对故障敏感而对噪声和建模误差不敏感、对残差的动态响应快,幅值变化较大的特点,有效降低故障误报警率和漏报警率.【期刊名称】《航空发动机》【年(卷),期】2017(043)002【总页数】6页(P17-22)【关键词】主燃油计量装置;故障诊断;卡尔曼滤波器;执行机构;线性模型【作者】芦海洋;王曦【作者单位】北京航空航天大学能源与动力工程学院;先进航空发动机协同创新中心,北京100191;北京航空航天大学能源与动力工程学院;先进航空发动机协同创新中心,北京100191【正文语种】中文【中图分类】V233.7+53卡尔曼滤波器的研究始于20世纪60年代,那时的计算机技术还不成熟,维纳滤波技术尽管已经产生,但是需要大量历史数据,不具备实现条件,然而卡尔曼滤波器状态估计的迭代更新过程不需要存储大量历史数据,从而解决了当时硬件的存储限制问题[1]。
基于数据驱动的主燃油计量装置故障诊断
基于数据驱动的主燃油计量装置故障诊断
龚秋婷;陈毅;刘渊;陈国顺;王奕首
【期刊名称】《推进技术》
【年(卷),期】2024(45)5
【摘要】为建立主燃油计量装置的故障诊断方法,提出一种基于快速存取记录器(QAR)数据的燃油计量参数估计模型建模方法,并结合液压机械控制装置工作原理,给出了基于燃油计量参数残差设计的主燃油计量装置故障诊断方案。
设计基于系统辨识的燃油计量活门位置(FMVP)估计模型,采取降阶处理策略以提高模型的估计精度和动态响应速度,在此基础上给出基于多项式拟合的燃油流量(FF)估计模型。
结果表明:所建立的FMVP模型估计残差不超过±2%,FF估计模型残差不超过±5%;该方案能够有效地诊断出燃油计量活门故障、线性可变差动位移传感器故障和热式流量计故障。
该方案结构简单,不需要大量的调试技术,提高了故障检测精度,具有工程应用前景。
【总页数】10页(P226-235)
【作者】龚秋婷;陈毅;刘渊;陈国顺;王奕首
【作者单位】厦门大学航空航天学院;厦门航空有限公司;中国航发湖南动力机械研究所
【正文语种】中文
【中图分类】V233.7
【相关文献】
1.基于卡尔曼滤波器的主燃油计量装置故障诊断
2.基于AMESim的涡桨发动机燃油计量装置仿真
3.基于AVR的串口型燃油计量装置
4.智能燃油计量装置故障诊断算法研究
5.基于大数据背景的电力计量装置故障诊断方法研究
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Unit
V
rad
rad/s
V
V
V
Variable name U1
theta
W
Variable
— dtheta
dw
derivative name
U2
U3
U4
—
—
—
(a)计量活门
表 2 内部变量设置
Field
Internal Internal Internal Internal Variable1 Variable2 Variable3 Variable4
3 数学模型
该系统分为步进电机和燃油计量装置 2 部分,系 统的稳态、动态性能主要由这 2 部分决定。
其中,步进电机的数学模型由 3 个方程组成,分
别是电压平衡方程、电磁转矩方程和机械系统的运动
方程
U(t)=R(I t)+L0 d(Idtt)+L1 cos(Nr兹)d(Idtt)-
L1Nr sin(Nr兹)(I t)dd兹t
CAO Qi-wei, WANG Bin, ZHAO Hao-cen, YE Zhi-feng 渊Jiangsu Province Key Laboratory of Aerospace Power System, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China冤
对应 4 相电压,设置内部变量 4 相电流,见表 2。 根据步进电机数学模型,设置实型参数,见表 3。 在 AMESet 环境下设定了对应的参数及变量后, 根据上文的步进电机数学模型,编写基于 C 语言的
PDF pdfFactory Pro
第5期
曹启威等:步进电机驱动的燃油计量装置建模与仿真
L1
B
J
T1
R
Nr
Unit
H
H
N·m·s kg·m2 N·m
Null
Default value 0.006 0.004 0.0001 0.00015 0
3
28
运行程序,最终生成步进
explicit explicit explicit explicit Type
variable variable variable variable
Unit
A
A
A
A
Variable name
I1
I2
I3
I4
Variable derivative name dI1
dI2
dI3
dI4
Dimension
23
表 1 端口外部变量设置
Field
Port 2 Port 1
Port 2 Port 3 Port 4 Port 5
Variable 1 Variable 2
Type
basic explicit explicit basic basic basic
variable variable variable variable variable variable
和动态特性的研究要求。
关键词:燃油计量装置;步进电机;AMESet;等压差活门;航空发动机
中图分类号:V228.1 +2
文献标识码:A
doi:1 0.1 3477/ki.aeroengine.201 6.05.004
Modeling and Simulation of Fuel Metering Unit Driven by Stepping Motor
量活门节流口开口面积,m2;籽 为燃油密度,kg/m3;驻P
为计量前后压差,Pa。
4 AMESim 建模
为获得该装置面向工程应用的 AMESim 模型,首 先解决模型库中缺乏步进电机模型问题。
4 相反应式步进电机有 5 个端口,其中 4 个端口 分别为 A、B、C、D 4 相,各相为电压输入,另一端口为 输出角度及角速度。各端口外部变量设置见表 1。
22
航空发动机
第 42 卷
个数控计量装置的一站式建模及仿真结果的置信度。 本文利用 AMESet 开发了步进电机的图形化模
型,并与主要部件的液压模型联结,实现了数控计量 装置的一站式建模与仿真,既可节省用户自行根据数 学模型建模的时间,也可减小采用多软件联合仿真可 能产生的误差,为建立直观、便捷、高置信度的数控燃 油计量装置面向对象的动力学模型提供了技术途径。
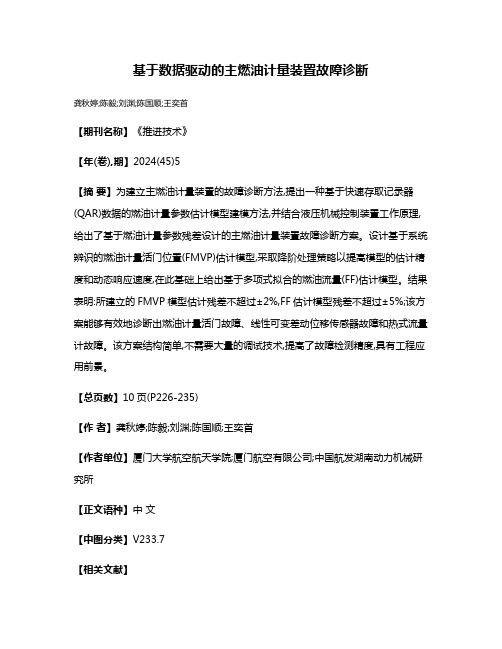
1 数控燃油计量装置组成
燃油计量装由等压差活门、定压
活门、计量活门、步进电机和角位移传感器等元件组
成,组成原理如图 1 所示。等压差活门保持计量活门
进、出口压差基本不变,经过计量活门的燃油流量就
惟一地由计量活门的开口面积决定,主要通过步进电
第 42 卷 第 5 期 2016 年 10 月
航空发动机
Aeroengine
Vol. 42 No. 5 Oct. 2016
步进电机驱动的燃油计量装置建模与仿真
曹启威,王 彬,赵皓岑,叶志锋
(南京航空航天大学 江苏省航空动力系统重点实验室,南京 210016)
摘要:为了开发数控燃油计量装置独立仿真平台,利用 AMESet 建立了基于 C 代码的步进电机部件模型;对建立的步进电机模
Key words: fuel metering unit; stepping motor; AMESet; constant pressure difference valve; aeroengine
0 引言
在航空发动机技术进步和性能提升过程中,燃油 与控制系统也由简单到复杂、由液压机械控制发展到 全权限数字电子控制(FADEC)[1-2]。新型航空发动机的 控制系统拟采用无液压机械备份的双通道 FADEC, 燃油系统则采用新型燃油泵和计量原理,可部分取代 现有系统[3-5]。目前,液压执行机构仍是不可缺少的组 成部分,逐步实现数字控制、提高可靠性和动态性能 是行业公认的研发方向 。 [6-7] 数控燃油计量装置是 FADEC 系统重要执行机构之一,开发高精度仿真模型 在研制中有重要工程意义。针对燃油系统在不同平台
(1)
移 Te=
1 2
m k =1
2
ik
dLk d兹
Te=J
d2兹 dt2
+B
d兹 dt
+T1
(2) (3)
式中:U(t)为施加于步进电机该相的矩形脉冲电压,
V;R 为该相绕组的电阻,赘;(I t)为该相绕组的电流,
A;Nr 为步进电机的齿数;L0 为绕组的平均电感,H;L1 为绕组电感的基波分量,H;Te 为电磁转矩,N·m;J 为 转子系统的转动惯量,kg·m2;B 为机械系统的阻尼系
1
1
1
1
(b)压差活门
表 3 实型参数设置
Real Real Real Real Real Real Real Field
parameter1 parameter2 parameter3 parameter4 parameter5 parameter6 parameter7
Variable name L0
收稿日期:2016-01-14 基金项目:中央高校基本科研业务费专项资金(NJ20150009)资助 作者简介:曹启威(1993),男,在读硕士研究生,研究方向为航空发动机燃油系统及测试技术;E-mail:15605182881@。
引用格式:
PDF pdfFactory Pro
型进行仿真,获得了其转角随输入脉冲的关系。建立了由计量活门、等压差活门、增压活门等组成的燃油计量装置机械液压组件
AMESim 模型,将开发的步进电机模型与计量装置各液压组件模型联结,实现了步进电机驱动的数控燃油计量装置面向对象的建
模。仿真结果表明:在正常工作范围内,仿真结果与设计参考偏差在 5%以内,所开发的 AMESim 模型能满足该数控计量装置的稳态
数,N·m·s;T1 为负载转矩,N·m。 计量活门进、出口压力在一定范围内变化时,等压
差活门可以通过调节回油口的开度使压差保持在调定
值附近,其中压差大小通过弹簧的预紧力调节[14-15]。根
据弹簧力与压差力的平衡关系可建立力平衡方程
(P1-P2)仔4
2
Dyc
=Fyc+K
xyc yc
(4)
式中:P1、P2 分别为计量活门进、出口压力,MPa;Dyc 为
机控制。
发动机输出转速
燃油管路
机械传动 信号传递
压力 燃油
减速机构 主燃油泵
等压差活门 计量活门
喷嘴 出口燃油 发动机燃烧室
计量活门控制器 步进电机 角位移传感器
图 1 燃油计量装置原理
2 步进电机工作原理
步进电机作为燃油计量装置的驱动部件,受电脉 冲信号的控制以固定角度旋转。步进电机接收到 1 个 脉冲信号转动 1 个固定角度,即步距角。为实现准确 定位,通过改变提供给步进电机的脉冲数来控制角位 移量;而为实现调速,可以改变提供给步进电机的脉 冲频率来调节其转动角速度和角加速度。因此,步进 电机具有定位精度高、调速范围宽、动态力矩大、控制 简单等显著特点[12]。由于步进电机的输入是矩形脉冲 序列,为数字量,故适合用数字控制电路控制。步进电 机输出转角与输入脉冲信号成线性关系,且输出角位 移无累积误差,所以航空发动机数控系统燃油计量装 置可采用步进电机作为驱动与控制元件[13]。
Abstract: In order to develop a independent simulation platform for digital control Fuel Metering Unit (FMU), a C program was established to describe the stepping motor in AMESet and obtain the component level model. Simulation using the developed model in AMESim gives the relationship between rotation angle and input pulse of the motor. FMU composed mainly of metering valve, constant pressure difference valve and booster valve were modeled in AMESim. Coupling of the developed motor model and the model of hydromechanical components achieved the entire object-oriented modeling of the digital control FMU driven by stepping motor. Simulation results show that a deviation between simulation results and design reference value is no more than 5% within usual operating range, and AMESim model developed can satisfy the requirements for study on steady-state and dynamic characteristics of the unit.