计算机控制技术实验二
计算机控制技术-实验2 X-Y运动平台数控实验

四 实验用主要设备
系统设备主要由工控机、PCI-1220运动控制卡、 步进电机驱动器及XY工作平台构成。
工控机:
工业控制机也称为工业计算机IPC,主要用于工业 工程测量、控制、数据处理等工作。常用的是PC总线 工控机( X86 CPU )。
工控机特点: (1)可靠性高和可维护性好 (2)环境适应性强 (3)控制的实时性 (4)完善的输入输出通道 (5)丰富的软件
5 Visual C++软件开发平台
Visual C++是一个在Windows环境下的程序开发工具,是 一种广谱性编程语言,覆盖从低级到高级的整个编程语 言范围。它是可视化的、面向对象的,采用事件驱动的。 它屏蔽了Windows环境下程序设计的复杂性,使Windows 应用程序设计变得简单、方便、快捷。
实验二 X-Y运动平台数控实验
一 实验目的
1.了解步进电机的工作原理与步进电机驱动器的使用。 2.掌握二轴运动控制卡的应用。 3.掌握逐点比较法插补的计算原理
4.掌握用VC++进行插补程序设计的方法。
二 实验仪器
1.研华工控机。 2.X-Y运动平台(含步进电机驱动器)。 3.PCI-1220U二轴运动控制板卡。 4.24V直流稳压电源。
3 逐点比较法直线插补和圆弧插补的计算原理:
插补计算就是数控系统根据输入的基本数据,通过计算,将工 件的轮廓或运动轨迹描述出来,边计算边根据计算结果向各 坐标发出进给指令。
数控系统常用的插补计算方法有:逐点比较法,数字积分法, 时间分割法,样条插补法等。本实验采用逐点比较法。
逐点比较法插补,就是刀具或绘图笔每走一步都要和给定轨迹 上的坐标值进行比较一次,决定下一步的进给方向。
计算机控制技术实验报告
实验一过程通道和数据采集处理为了实现计算机对生产过程或现场对象的控制,需要将对象的各种测量参数按要求转换成数字信号送入计算机;经计算机运算、处理后,再转换成适合于对生产过程进行控制的量。
所以在微机和生产过程之间,必须设置信息的传递和变换的连接通道,该通道称为过程通道。
它包括模拟量输入通道、模拟量输出通道、数字量输入通道、数字量输出通道。
模拟量输入通道:主要功能是将随时间连续变化的模拟输入信号变换成数字信号送入计算机,主要有多路转化器、采样保持器和A/D 转换器等组成。
模拟量输出通道:它将计算机输出的数字信号转换为连续的电压或电流信号,主要有D/A 转换器和输出保持器组成。
数字量输入通道:控制系统中,以电平高低和开关通断等两位状态表示的信号称为数字量,这些数据可以作为设备的状态送往计算机。
数字量输出通道:有的执行机构需要开关量控制信号 (如步进电机),计算机可以通过I/O 接口电路或者继电器的断开和闭合来控制。
输入与输出通道本实验教程主要介绍以A/D 和D/A 为主的模拟量输入输出通道,A/D 和D/A 的芯片非常多,这里主要介绍人们最常用的ADC0809 和TLC7528。
一、实验目的1.学习A/D 转换器原理及接口方法,并掌握ADC0809 芯片的使用2.学习D/A 转换器原理及接口方法,并掌握TLC7528 芯片的使用二、实验内容1.编写实验程序,将-5V ~ +5V 的电压作为ADC0809 的模拟量输入,将转换所得的8 位数字量保存于变量中。
2.编写实验程序,实现D/A 转换产生周期性三角波,并用示波器观察波形。
三、实验设备PC 机一台,TD-ACC+实验系统一套,i386EX 系统板一块四、实验原理与步骤1.A/D 转换实验ADC0809 芯片主要包括多路模拟开关和A/D 转换器两部分,其主要特点为:单电源供电、工作时钟CLOCK 最高可达到1200KHz 、8 位分辨率,8 个单端模拟输入端,TTL 电平兼容等,可以很方便地和微处理器接口。
计算机控制技术实验报告
计算机控制技术实验报告实验一系统认识及程序调试练习实验目的1.掌握TD-ACC+实验教学系统联机软件中的各菜单功能,熟练掌握其中的程序编辑、编译、链接、加载及调试方法。
2.了解TD-ACC+实验教学系统的系统资源及硬件操作环境。
实验设备PC 机一台,TD-ACC+实验系统一套实验内容1.阅读“第一部分i386EX 系统板介绍”,了解TD-ACC+实验教学系统的构成;2.读懂实验程序,对实验程序进行编辑、编译、链接、加载及调试练习。
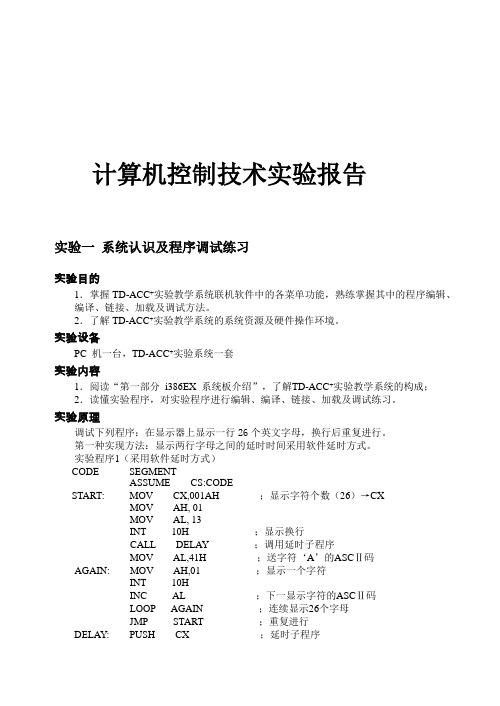
实验原理调试下列程序:在显示器上显示一行26个英文字母,换行后重复进行。
第一种实现方法:显示两行字母之间的延时时间采用软件延时方式。
实验程序1(采用软件延时方式)CODE SEGMENTASSUME CS:CODESTART: MOV CX,001AH ;显示字符个数(26)→CXMOV AH, 01MOV AL, 13INT 10H ;显示换行CALL DELAY ;调用延时子程序MOV AL,41H ;送字符‘A’的ASCⅡ码AGAIN: MOV AH,01 ;显示一个字符INT 10HINC AL ;下一显示字符的ASCⅡ码LOOP AGAIN ;连续显示26个字母JMP START ;重复进行DELAY: PUSH CX ;延时子程序MOV CX,0FFFFH DEL1: PUSH AX POP AX LOOP DEL1POP CX RET CODE ENDSEND START第二种实现方法:显示两行字母之间的间隔时间用内部定时器8254进行控制,时间到由定时器的OUT 端发出脉冲信号到中断控制器8259的中断信号输入端,向CPU 请求中断,在中断程序中完成显示一行字母的功能。
硬件接线如图1-1,用排线将i386内部1#定时器输出OUT1连接到8259的一个中断请求端IRQ7。
8254与8253类似,它们的编程方式是兼容的,其控制字格式如下:SC 1 SC 0——所选计数器 0 0 计数器0 0 1 计数器1 1 0 计数器2 1 1 无意义 RW 1 RW 0——读/写格式 0 0 锁定当前计数值(供CPU 读取) 0 1 只读/写低8位 1 0 只读/写高8位 1 1 先读/写低8位,后读/写高8位M 2 M 1M 0——工作方式选择 0 0 0 方式0 0 0 1 方式1 X 1 0 方式2 X 1 1 方式3 1 0 0 方式4 1 0 1 方式5 BCD ——计数格式 0 计数器按二进制格式计数 1 计数器按BCD 码格式计数实验程序2(采用定时中断方式) CODE SEGMENTASSUME CS:CODESTART: MOV AX,OFFSET IRQ7;填写8259的7号中断矢量入口地址的偏移量 MOV SI,003CH ;填写8259中断7的中段矢量 MOV [SI],AX ;填偏移量矢量 MOV AX,CS ;填写8259中断矢量入口地址的段地址 MOV SI,003EH ;填写7号中断段地址矢量 MOV [SI],AXCLI ;关系统总中断 CALL SYSINTI ;调用系统初始化子程序 MOV DX,0F043H MOV AL,076H ;初始化1#定时器 OUT DX,ALMOV DX,0F041H图1-1MOV AL,10H ;定时10ms时间常数低8位OUT DX,AL ;写1#定时器定时常数的低字节MOV X,0F041HMOV AL,27H ;定时10ms时间常数高8位OUT DX,AL ;写1#定时器定时常数的高字节MOV BX,64HMOV AH, 01MOV AL, 13INT 10H ;显示换行AGAIN: STI ;打开系统总中断HLT ;停机等待直到有中断产生JMP AGAIN ;继续IRQ7: DEC BXJNZ FINISHMOV BX,64HMOV CX,001AHMOV AL,41HAGAIN1: MOV AH,01INT 10HINC ALLOOP AGAIN1MOV AH, 01MOV AL, 13INT 10HFINISH: MOV AL,20H ;中断结束OUT 20H,ALIRET ;中断返回SYSINTI: MOV AX,8000H ;系统初始化子程序(已保存在机器中)OUT 23H,AL ;扩展IO使能XCHG AL,AHOUT 22H,ALOUT 22H,AXMOV DX,0F822H ;初始化管脚配置P2CFG,配置CS0#MOV AL,70HOUT DX,ALMOV DX,0F824H ;初始化管脚配置P3CFG,配置主片IRQ7MOV AL,0B2HOUT DX,ALMOV DX,0F832H ;初始化管脚配置INTCFGMOV AL,0AHOUT DX,ALMOV DX,0F834H ;初始化管脚配置TMRCFGMOV AL,15H ;将GATE1接VCCOUT DX,ALMOV AL,11H ;初始化主片8259OUT 20H,ALMOV AL,08HOUT 21H,ALMOV AL,04HOUT 21H,ALMOV AL,01HOUT 21H,ALMOV AL,6FH ;写主片8259的中断屏蔽字,允许主片的IRQ7(用OUT 21H,AL 户程序使用)和IRQ4(系统通讯用)MOV AL,11H ;初始化从片8259OUT 0A0H,ALMOV AL,30HOUT 0A1H,ALMOV AL,02HOUT 0A1H,ALMOV AL,01HOUT 0A1H,ALMOV AL,0FFHOUT 0A1H,ALRETCODE ENDSEND START实验步骤1.打开微机及实验系统电源。
计算机控制技术实验报告

计算机控制技术实验报告精33 任雪冰 2013010667一. 设计报告的全部内容(含分析):(一). 基本信息:实验日期为第15周周三以及即将到来的第16周周二,组号为第4组,至于设备号印象不是很清楚,似乎是1号(这就很尴尬)。
组员有赵航,康轶譞与任雪冰。
(二). 电机模型参数的辨识过程与辨识结果:辨识过程:1.首先是采样周期的确定,根据题中所给条件,由M P =0.3,t s =0.5可以解出:ξ=0.3579,ωn =16.7665,BW=23.6527再根据公式:ωs =(10−30)max (ωn ,BW),T =2πωs 可以解出:0.008855s<T<0.026564s为方便计算,令采样周期T=0.01s=10ms2.然后便是在实验室的工作:给予系统一个幅值为5V 的阶跃信号,观察并导出系统的响应曲线以及个点数据。
3.数据拟合:理论计算出阶跃信号的输出函数为:5()()b Y s s s a =+ 5()(1)at b y t e a-=- 编写matlab 程序:fun=inline('b(1).*(1-exp(-b(2)*k))','b','k');b0=[8,0.5];[b,r,j]=nlinfit(k,y,fun,b0);b(k 是采集的时间,b 是对应的数据)将三次数据得到的b(1)、b(2)做平均得到最终结果a=b(2)、b=b(1)*a/54.辨识结果:结果为:a=5.9817,b=50.7030(三). 计算机控制设计:原理框图如下:(图片来源于老师课件第七章)设计步骤:1.Z变换:被控对象传递函数为:G s=50.7030对其求Z变换得:H z=B(z)=0.002485z+0.00243622.求H m分解:B z=B+B−,B+=1,B−=0.002485z+0.002436由于K V=20>1,所以设:B m1=b0z+b1可计算:d=degA z−deg B z=1r=deg B−z+deg B m1z=2p1=−2e−ξωn T cos2∙ωn∙T =−1.8605p2=e−2ξωn T=0.8869所以:H m z=B m(z)m=(0.002485z+0.002436)∙(b0z+b1)32根据条件K V=20>1可得方程:H m1=1−dH m(z)dz z=1=1TK V=15最后解得:b0=0.7791,b1=4.5857H m z=B m(z)m=0.001936z2+0.01329z+0.01117323.求T,S,R:首先知道:T z=B m1z=0.7791z+4.5857设:R z=z+r,S z=s0z+s1再根据公式:A z∙R z+B z∙S z=A m(z)带入后各次幂对应系数相等,可解得:R z=z+0.03471,S z=18.7872z−13.4224带入后验证无误。
计算机控制实验报告
.《计算机控制技术》实验报告班级:学号:姓名:信息工程学院2016-2017-2实验1:D/A转换实验实验名称:D/A转换实验一.实验目的学习D/A转换器原理及接口方式,并掌握TLC7528芯片的使用。
二.实验原理TLC7528芯片,它是8位、并行、两路、电压型输出数模转换器。
会将数字信号转换成模拟信号。
三.实验容本实验输入信号:8位数字信号本实验输出信号:锯齿波模拟信号本实验数/模转换器:TLC7528输出电路预期实验结果:在虚拟示波器中显示数字信号转换成功的锯齿波模拟信号的波形图。
四.实验结果及分析记录实验结果如下:结果分析:为什么会出现这样的实验结果?请用理论分析这一现象。
D/A就是将数字量转化为模拟量,然后通过虚拟示波器显示出来,表现为电压的变化。
1.实验2:采样与保持实验实验名称:信号采样与保持一.实验目的1.熟悉信号的采样与保持过程2.学习和掌握采样定理3.学习用直线插值法和二次曲线插值法还原信号二.实验原理香农(采样) 定理:若对于一个具有有限频谱(|W|<Wmax)的连续信号f (t)进行采样,当采样频率满足Ws≥2Wmax 时,则采样函数f*(t) 能无失真地恢复到原来的连续信号f(t)。
Wmax 为信号的最高频率,Ws 为采样频率。
三.实验容本实验输入信号:正弦波模拟信号本实验输出信号:正弦波数字信号本实验采样信号:方波预期实验结果:1.在模拟示波器中成功显示采样与保持的正弦波信号。
2.成功在模拟示波器中还原输入的正弦波信号。
四.实验结果及分析记录实验结果如下:零阶保持增大采样周期失真3.直线采值二次曲线结果分析:为什么会出现这样的实验结果?请用理论分析这一现象。
实验3:数字滤波实验实验名称:数字滤波一.实验目的1.学习和掌握一阶惯性滤波2.学习和掌握四点加权滤波二.实验原理一般现场环境比较恶劣,干扰源比较多,消除和抑制干扰的方法主要有模拟滤波和数字滤波两种。
由于数字滤波方法成本低、可靠性高、无阻抗匹配、灵活方便等特点,被广泛应用,下面是一个典型数字滤波的方框图:三.实验容本实验输入信号:正弦信号干扰信号本实验输出信号:正弦波模拟量本实验采样信号:周期为5ms的方波本实验被控对象:预期实验结果:输入为带有毛刺的正弦波,经过滤波后,输出为正弦波信号四.实验结果及分析记录实验结果如下:5.结果分析:不同采样周期对实验结果的影响,使用理论分析这一结果。
计算机控制技术实验报告
计算机控制技术实验报告实验一过程通道和数据采集处理一、输入与输出通道本实验教程主要介绍以A/D 和D/A 为主的模拟量输入输出通道,A/D 和D/A 的芯片非常多,这里主要介绍人们最常用的ADC0809 和TLC7528。
一、实验目的1(学习A/D 转换器原理及接口方法,并掌握ADC0809 芯片的使用2(学习D/A 转换器原理及接口方法,并掌握TLC7528 芯片的使用二、实验内容1(编写实验程序,将,5V ~ +5V 的电压作为ADC0809 的模拟量输入,将转换所得的8 位数字量保存于变量中。
2(编写实验程序,实现D/A 转换产生周期性三角波,并用示波器观察波形。
三、实验设备+PC 机一台,TD-ACC实验系统一套,i386EX 系统板一块四、实验原理与步骤1(A/D 转换实验ADC0809 芯片主要包括多路模拟开关和A/D 转换器两部分,其主要1特点为:单电源供电、工作时钟CLOCK 最高可达到1200KHz 、8 位分辨率,8 个单端模拟输入端,TTL 电平兼容等,可以很方便地和微处理器+ 接口。
TD-ACC教学系统中的ADC0809 芯片,其输出八位数据线以及CLOCK 线已连到控制计算机的数据线及系统应用时钟1MCLK (1MHz) 上。
其它控制线根据实验要求可另外连接 (A、B、C、STR、/OE、EOC、IN0,IN7)。
根据实验内容的第一项要求,可以设计出如图1.1-1 所示的实验线路图。
单次阶跃模数转换单元控制计算机图1.1-1上图中,AD0809 的启动信号“STR”是由控制计算机定时输出方波来实现的。
“OUT1” 表示386EX 内部1,定时器的输出端,定时器输出的方波周期,定时器时常。
图中ADC0809 芯片输入选通地址码A、B、C 为“1”状态,选通输入通道IN7;通过单次阶跃单元的电位器可以给A/D 转换器输入,5V ~ +5V 的模拟电压;系统定时器定时1ms 输出方波信号启动A/D 转换器,并将A/D 转换完后的数据量读入到控制计算机中,最后保存到变量中。
零输入、零状态及完全响应
实验二零输入、零状态及完全响应一、实验目的1.通过实验,进一步了解系统的零输入响应、零状态响应和完全响应的原理。
2.掌握用简单的R-C电路观测零输入响应、零状态响应和完全响应的实验方法。
二、实验设备1.THBCC-1型信号与系统·控制理论及计算机控制技术实验平台2.PC机3. THBXD数据采集卡一块(含37芯通信线、16芯排线和USB电缆线各一根)三、实验内容1.连接一个能观测零输入响应、零状态响应和完全响应的电路图(参考图2-1)。
2.分别观测该电路的零输入响应、零状态响应和完全响应的动态曲线。
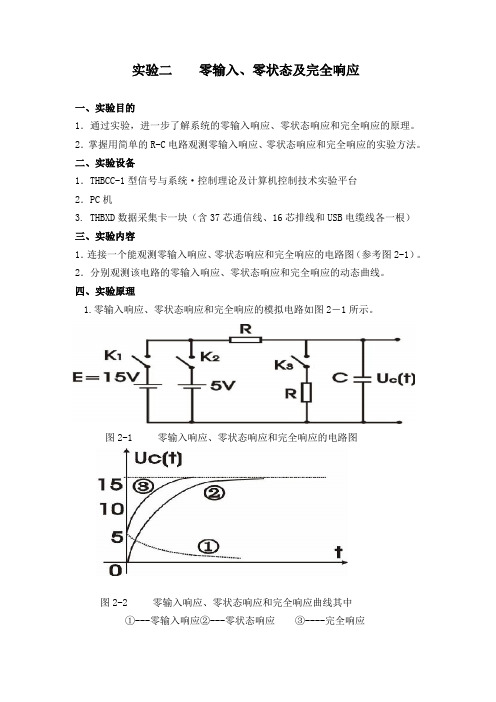
四、实验原理1.零输入响应、零状态响应和完全响应的模拟电路如图2-1所示。
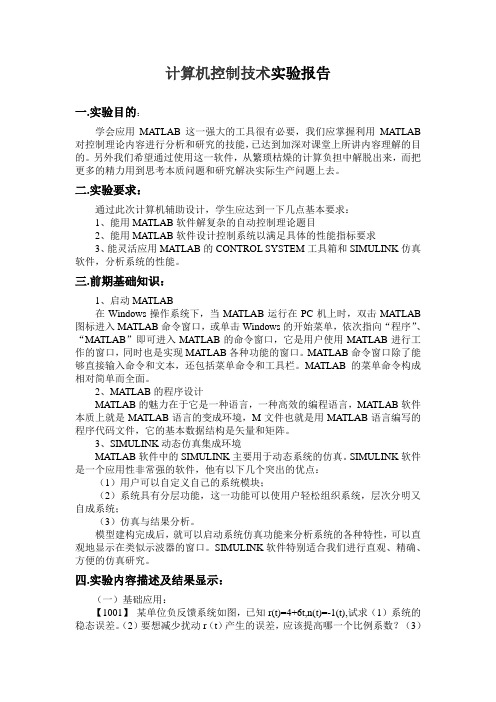
图2-1零输入响应、零状态响应和完全响应的电路图图2-2 零输入响应、零状态响应和完全响应曲线其中①---零输入响应②---零状态响应③----完全响应式(3)等号右方的第二项为零输入响应,即由初始条件激励下的输出响应;第一项为零状态响应,它描述了初始条件为零(Uc(0)=0)时,电路在输入E=15V 作用下的输出响应,显然它们之和为电路的完全响应,图2-2所示的曲线表示这三种的响应过程。
五、实验步骤1.实验准备1.1 将“阶跃信号发生器”的输出端接至实验台上“输入响应、零状态响应和完全响应”单元的“+2V”输入端,调节“阶跃型号发生器”正输出的“RP1”电位器,让阶跃输出为“2V”;1.2 将“直流稳压电源”的“+5V”接至“零输入响应、零状态响应和完全响应”单元的“+5V”输入端。
1.3 将“零输入、零状态和完全响应”单元的输出端与“数据采集接口单元”的AD1通道相连。
2. 零输入响应将S1短接到2处,S2短接到1处,使+2V直流电源对电容C充电,当充电完毕后,将S2接到2处,用“THBCC-1”软件上的“虚拟示波器”观察并记录Uc(t)的变化。
零输入响应2.零状态响应先将S2短接到2处,使电容两端的电压放电完毕,将S1接到1处,S2接到1处,用虚拟示波器观察并记5V直流电向电容的充电过程。
计算机控制实验报告-离散化方法研究解析

东南大学自动化学院实验报告课程名称:计算机控制技术第 2 次实验实验名称:实验三离散化方法研究院(系):自动化学院专业:自动化姓名:学号:实验室:416 实验组别:同组人员:实验时间:2014年4月10日评定成绩:审阅教师:一、实验目的1.学习并掌握数字控制器的设计方法(按模拟系统设计方法与按离散设计方法);2.熟悉将模拟控制器D(S)离散为数字控制器的原理与方法(按模拟系统设计方法);3.通过数模混合实验,对D(S)的多种离散化方法作比较研究,并对D(S)离散化前后闭环系统的性能进行比较,以加深对计算机控制系统的理解。
二、实验设备1.THBDC-1型控制理论·计算机控制技术实验平台2.PCI-1711数据采集卡一块3.PC机1台(安装软件“VC++”及“THJK_Server”)三、实验原理由于计算机的发展,计算机及其相应的信号变换装置(A/D和D/A)取代了常规的模拟控制。
在对原有的连续控制系统进行改造时,最方便的办法是将原来的模拟控制器离散化。
在介绍设计方法之前,首先应该分析计算机控制系统的特点。
图3-1为计算机控制系统的原理框图。
图3-1 计算机控制系统原理框图由图3-1可见,从虚线I向左看,数字计算机的作用是一个数字控制器,其输入量和输出量都是离散的数字量,所以,这一系统具有离散系统的特性,分析的工具是z变换。
由虚线II向右看,被控对象的输入和输出都是模拟量,所以该系统是连续变化的模拟系统,可以用拉氏变换进行分析。
通过上面的分析可知,计算机控制系统实际上是一个混合系统,既可以在一定条件下近似地把它看成模拟系统,用连续变化的模拟系统的分析工具进行动态分析和设计,再将设计结果转变成数字计算机的控制算法。
也可以把计算机控制系统经过适当变换,变成纯粹的离散系统,用z变化等工具进行分析设计,直接设计出控制算法。
按模拟系统设计方法进行设计的基本思想是,当采样系统的采样频率足够高时,采样系统的特性接近于连续变化的模拟系统,此时忽略采样开关和保持器,将整个系统看成是连续变化的模拟系统,用s域的方法设计校正装置D(s),再用s域到z域的离散化方法求得离散传递函数D(z)。
自控实验报告
计算机控制技术实验报告一.实验目的:学会应用MATLAB这一强大的工具很有必要,我们应掌握利用MATLAB 对控制理论内容进行分析和研究的技能,已达到加深对课堂上所讲内容理解的目的。
另外我们希望通过使用这一软件,从繁琐枯燥的计算负担中解脱出来,而把更多的精力用到思考本质问题和研究解决实际生产问题上去。
二.实验要求:通过此次计算机辅助设计,学生应达到一下几点基本要求:1、能用MATLAB软件解复杂的自动控制理论题目2、能用MATLAB软件设计控制系统以满足具体的性能指标要求3、能灵活应用MATLAB的CONTROL SYSTEM工具箱和SIMULINK仿真软件,分析系统的性能。
三.前期基础知识:1、启动MATLAB在Windows操作系统下,当MATLAB运行在PC机上时,双击MATLAB 图标进入MATLAB命令窗口,或单击Windows的开始菜单,依次指向“程序”、“MATLAB”即可进入MATLAB的命令窗口,它是用户使用MATLAB进行工作的窗口,同时也是实现MATLAB各种功能的窗口。
MATLAB命令窗口除了能够直接输入命令和文本,还包括菜单命令和工具栏。
MATLAB的菜单命令构成相对简单而全面。
2、MATLAB的程序设计MATLAB的魅力在于它是一种语言,一种高效的编程语言,MATLAB软件本质上就是MATLAB语言的变成环境,M文件也就是用MATLAB语言编写的程序代码文件,它的基本数据结构是矢量和矩阵。
3、SIMULINK动态仿真集成环境MATLAB软件中的SIMULINK主要用于动态系统的仿真。
SIMULINK软件是一个应用性非常强的软件,他有以下几个突出的优点:(1)用户可以自定义自己的系统模块;(2)系统具有分层功能,这一功能可以使用户轻松组织系统,层次分明又自成系统;(3)仿真与结果分析。
模型建构完成后,就可以启动系统仿真功能来分析系统的各种特性,可以直观地显示在类似示波器的窗口。
自动控制原理实验二阶系统的阶跃响应
实验二 二阶系统的阶跃响应一、实验目的1. 通过实验了解参数ζ(阻尼比)、n ω(自然频率)的变化对二阶系统动态性能的影响;2. 掌握二阶系统动态性能的测试方法。
二、实验设备1. THBDC-1型控制理论·计算机控制技术实验平台;2. PC 机一台(含上位机软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线;三、实验内容1. 观测二阶系统的阻尼比分别在0<ζ<1,ζ=1和ζ>1三种情况下的单位阶跃响应曲线;2. ζ为一定时,观测系统在不同n ω时的响应曲线。
四、实验原理1. 二阶系统的瞬态响应用二阶常微分方程描述的系统,称为二阶系统,其标准形式的闭环传递函数为2222)()(n n n S S S R S C ωζωω++= (2-1) 开环传递函数2()(2)n n G s S S ωξω=+ (2-2)闭环特征方程:0222=++nn S ωζω 其解 122,1-±-=ζωζωn n S ,针对不同的ζ值,特征根会出现下列三种情况:1)0<ζ<1(欠阻尼),22,11ζωζω-±-=n n j S此时,系统的单位阶跃响应呈振荡衰减形式,其曲线如图2-1的(a)所示。
它的数学表达式为:()1()n t d C t Sin t ζωωβ-=+ 式中21ζωω-=n d ,ζζβ211-=-tg 。
2)1=ζ(临界阻尼)n S ω-=2,1此时,系统的单位阶跃响应是一条单调上升的指数曲线,如图2-1中的(b)所示。
3)1>ζ(过阻尼),122,1-±-=ζωζωn n S ,此时系统有二个相异实根,它的单位阶跃响应曲线如图2-1的(c)所示。
(a) 欠阻尼(0<ζ<1) (b)临界阻尼(1=ζ) (c)过阻尼(1>ζ)图2-1 二阶系统的动态响应曲线虽然当ζ=1或ζ>1时,系统的阶跃响应无超调产生,但这种响应的动态过程太缓慢,故控制工程上常采用欠阻尼的二阶系统,一般取ζ=0.6~0.7,此时系统的动态响应过程不仅快速,而且超调量也小。
计算机控制技术实验报告
计算机控制技术实验报告实验名称:计算机控制技术实验实验目的:通过学习计算机控制技术的基本原理和方法,掌握计算机控制技术的应用。
实验原理:计算机控制技术是一种应用于现代工业自动化控制中的控制技术。
计算机控制系统由计算机硬件和软件组成,通过采集、处理和输出各种信号来完成对被控对象的控制。
实验仪器:计算机、控制器、传感器、被控对象等。
实验步骤:1.确定实验目标和实验要求。
2.研究被控对象的性质和特点,设计控制方案。
3.配置硬件设备,连接传感器、控制器和计算机。
4.编写控制程序,设置控制算法,实现被控对象的控制。
5.进行实验操作,观察并记录实验结果。
6.对实验结果进行分析和评价,总结实验经验。
实验结果和分析:在实验中,我们选择了一个温度控制系统作为被控对象。
通过传感器采集环境温度,并通过控制器将控制信号发送给加热器,调节加热器的功率来控制环境温度。
通过实验操作,我们观察了不同环境温度下的控制效果。
实验结果表明,在控制系统正常工作时,环境温度可以稳定在设定温度附近,并具有很好的控制精度。
此外,我们还对控制系统进行了稳定性和响应速度等性能指标的评价。
实验结果显示,控制系统具有较好的稳定性和快速响应的特点,可以满足实际工业生产中对温度控制的要求。
实验总结:通过本次实验,我们深入学习了计算机控制技术的基本原理和方法,并通过实践掌握了实验操作的技巧。
实验结果表明,计算机控制技术在工业生产中具有广泛的应用前景。
在今后的学习中,我们将进一步深入研究计算机控制技术的进一步发展,并不断提高实际应用能力,为工业自动化控制的发展贡献自己的力量。
实验2LED数码管动态和静态显示实验
广东海洋大学学生实验报告书实验名称实验2 LED数码管动态和静态显示课程名称计算机控制技术系自动化系专业自动化班级1132 学生姓名袁明星/201311632223 实验地点科技楼403实验日期王波成绩指导教师一、设计目的:LED数码管动态和静态显示二、设计任务:1.LED数码管动态显示,动态扫描时间间隔可调;2.LED数码管静态显示,显示动态扫描时间间隔;三、操作流图:步骤:1.上排的三个数码管用静态扫描方式,显示动态扫描时间间隔;2.下排的6用数码管用动态扫描方式,显示时钟;3.一个独立的按键,每按一次,可增加动态扫描时间间隔四、实验要求:1、态度严谨,独立完成,勤于思考,善于总结;2、认真完成实验报告。
ORG 0000HAJMP STARTORG 0003HAJMP INT_0ORG 000BHAJMP INT_T0ORG 0030H START:MOV 30H,#0 ;秒MOV 31H,#0 ;分MOV 32H,#0 ;时MOV 33H,#1MOV SP,#40HSETB IT0MOV TMOD,#01HMOV TH0,#3CHMOV TL0,#0B0HMOV IE,#83HSETB TR0MOV R0,#20V1: MOV A,33HMOV B,#100DIV ABMOV DPTR,#TABMOVC A,@A+DPTRMOV P3,#4FHMOV P2,AMOV A,BMOV B,#10DIV ABMOV DPTR,#TABMOVC A,@A+DPTRMOV P3,#2FHMOV P2,AMOV A,BMOV DPTR,#TABMOVC A,@A+DPTRMOV P3,#1FHMOV P2,AMOV A,30HMOV B,#10DIV ABMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#02H MOV P0,AACALL DELAY MOV A,BMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#01H MOV P0,AACALL DELAYMOV A,31HMOV B,#10DIV ABMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#08H MOV P0,AACALL DELAY MOV A,BMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#04H MOV P0,AACALL DELAYMOV A,32HMOV B,#10DIV ABMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#20H MOV P0,AACALL DELAY MOV A,BMOV DPTR,#TAB MOVC A,@A+DPTR MOV P1,#10H MOV P0,AACALL DELAYAJMP V1INT_T0:PUSH ACCDJNZ R0,NEXTMOV A,30HINC ACJNE A,#60,NEXT1MOV 30H,#0MOV A,31HINC ACJNE A,#60,NEXT2MOV 31H,#0MOV A,32HINC ACJNE A,#24,NEXT3MOV 32H,#0AJMP NEXT4NEXT1: MOV 30H,AAJMP NEXT4NEXT2: MOV 31H,AAJMP NEXT4NEXT3: MOV 32H,ANEXT4: MOV R0,#20 NEXT: MOV TH0,#3CHMOV TL0,#0B0HPOP ACCRETIINT_0: PUSH ACCMOV A,33HCJNE A,#100,NEXT01MOV 33H,#1AJMP NEXT0NEXT01:MOV B,#10MUL ABMOV 33H,ANEXT0: POP ACCRETIDELAY:MOV R7,33HDEL1: MOV R6,#4NOPDEL2: MOV R5,#123DEL3: DJNZ R5,DEL3DJNZ R6,DEL2DJNZ R7,DEL1RETTAB: DB 0C0H,0F9H,0A4H,0B0H,099H,092H,082H,0F8H,080H,090H END六、实验心得:通过实验,让我对这门课程有了更深入的了解。
计算机控制技术实验和实验

试验一经典环节旳MATLAB仿真一、试验目旳1.熟悉MATLAB桌面和命令窗口,初步理解SIMULINK功能模块旳使用措施。
2.通过观测经典环节在单位阶跃信号作用下旳动态特性,加深对各经典环节响应曲线旳理解。
3.定性理解各参数变化对经典环节动态特性旳影响。
二、SIMULINK旳使用MATLAB中SIMULINK是一种用来对动态系统进行建模、仿真和分析旳软件包。
运用SIMULINK功能模块可以迅速旳建立控制系统旳模型,进行仿真和调试。
1.运行MATLAB软件,在命令窗口栏“>>”提醒符下键入simulink命令,按Enter键或在工具栏单击按钮,即可进入如图1-1所示旳SIMULINK仿真环境下。
2.选择File菜单下New下旳Model命令,新建一种simulink仿真环境常规模板。
图1-1 SIMULINK仿真界面图1-2 系统方框图3.在simulink仿真环境下,创立所需要旳系统。
以图1-2所示旳系统为例,阐明基本设计环节如下:1)进入线性系统模块库,构建传递函数。
点击simulink下旳“Continuous”,再将右边窗口中“Transfer Fen”旳图标用左键拖至新建旳“untitled”窗口。
2)变化模块参数。
在simulink仿真环境“untitled”窗口中双击该图标,即可变化传递函数。
其中方括号内旳数字分别为传递函数旳分子、分母各次幂由高到低旳系数,数字之间用空格隔开;设置完毕后,选择OK,即完毕该模块旳设置。
3)建立其他传递函数模块。
按照上述措施,在不一样旳simulink旳模块库中,建立系统所需旳传递函数模块。
例:比例环节用“Math”右边窗口“Gain”旳图标。
4)选用阶跃信号输入函数。
用鼠标点击simulink下旳“Source”,将右边窗口中“Step”图标用左键拖至新建旳“untitled”窗口,形成一种阶跃函数输入模块。
5)选择输出方式。
用鼠标点击simulink下旳“Sinks”,就进入输出方式模块库,一般选用“Scope”旳示波器图标,将其用左键拖至新建旳“untitled”窗口。
计算机控制技术实验报告册 (1)
5.在弹出的参数窗口中填入想要变换的模拟量,点击变换,在下面的文字框内将算出变换后的数字量。
6.点击确定,在显示窗口观测采集到的数字量。
并将测量结果填入下表2-1:数字量模拟量理论值实测值762460256表2-1五、实验结果画出模拟量与数字量的对应曲线如图2-1:图2-1六、实验结果分析表2-1中计算出理论值,与实验结果比较,分析产生误差的原因系仪器误差、实验软件的精度误差。
七、实验心得本次试验需要进行的连电路、实验软件操作都比较简单,但对于实验原理我们应有更加深刻的理解,对于实验箱内部的A/D转换原理要有所思考,不能只满足与简单的实验表象,而应思考更深层次的问题。
实验三数字PID控制一、实验目的1.研究PID控制器的参数对系统稳定性及过渡过程的影响。
2.研究采样周期T对系统特性的影响。
3.研究I型系统及系统的稳定误差。
二、实验仪器1.EL-AT-II型计算机控制系统实验箱一台2.PC计算机一台三、实验内容1.系统结构图如3-1图。
图3-1 系统结构图图中 Gc(s)=Kp(1+Ki/s+Kds)Gh(s)=(1-e-TS)/sGp1(s)=5/((+1)(+1))Gp2(s)=1/(s(+1))2.开环系统(被控制对象)的模拟电路图如图3-2和图3-3,其中图3-2对应GP1(s),图3-3对应Gp2(s)。
图3-2 开环系统结构图1 图3-3开环系统结构图23.被控对象GP1(s)为“0型”系统,采用PI控制或PID控制,可使系统变为“I型”系统,被控对象Gp2(s)为“I型”系统,采用PI控制或PID控制可使系统变成“II型”系统。
4.当r(t)=1(t)时(实际是方波),研究其过渡过程。
5.PI调节器及PID调节器的增益Gc(s)=Kp(1+K1/s)=KpK1((1/k1)s+1) /s=K(Tis+1)/s式中 K=KpKi , Ti=(1/K1)不难看出PI调节器的增益K=KpKi,因此在改变Ki时,同时改变了闭环增益K,如果不想改变K,则应相应改变Kp。
计算机控制技术实验报告
实验一 基于Matlab 的控制系统模型一、 实验目的1. 熟悉Matlab 的使用环境,学习Matlab 软件的使用方法和编程方法2. 学习使用Matlab 进行各类数学变换运算的方法3. 学习使用Matlab 建立控制系统模型的方法二、 实验器材x86系列兼容型计算机,Matlab 软件三、 实验原理1. 香农采样定理对一个具有有限频谱的连续信号f(t)进行连续采样,当采样频率满足max 2ωω≥S 时,采样信号f*(t)能无失真的复现原连续信号。
作信号tet f 105)(-=和kT10*5)(-=et f 的曲线,比较采样前后的差异。
幅度曲线: T=0.05 t=0:T:0.5f=5*exp(-10*t) subplot(2,1,1) plot(t,f) gridsubplot(2,1,2) stem(t,f) grid请改变采样周期T ,观察不同的采样周期下的采样效果。
幅频曲线: w=-50:1:50F=5./sqrt(100+w.^2) plot(w,F) grid若|)0(|1.0|)(|max F j F =ω,选择合理的采样周期T 并加以验证。
(抽样后的频谱是将原信号频谱以抽样频率s ω为周期进行周期延拓,幅度变为原来的s T 1而得到)w=-400:20:400ws=200 Ts=2*pi/wsF0=5/Ts*(1./sqrt(100+(w).^2)) F1=5/Ts*(1./sqrt(100+(w-ws).^2)) F2=5/Ts*(1./sqrt(100+(w+ws).^2)) plot(w,F0,w,F1,w,F2) grid请改变采样频率ws ,观察何时出现频谱混叠?2. 拉式变换和Z 变换使用Matlab 求函数的拉氏变换和Z 变换拉式变换: syms a w t f1=exp(-a*t)Z 变换: syms a k T f1=exp(-a*k*T)laplace(f1) f2=tlaplace(f2) f3=t* exp(-a*t) laplace(f3) f4=sin(w*t) laplace(f4)f5=exp(-a*t)*cos(w*t) laplace(f5)反拉式变换 syms s a f1=1/silaplace(f1) f2=1/(s+a) ilaplace(f2) f3=1/s^2 ilaplace(f3)f4=w/(s^2+w^2) ilaplace(f4)f5=1/(s*(s+2)^2*(s+3)) ilaplace(f5)ztrans(f1) f2=k*T ztrans(f2)f3=k*T*exp(-a*k*T) ztrans(f3) f4=sin(a*k*T) ztrans(f4) f5=a^k ztrans(f5)反Z 变换 syms z a T f1=z/(z-1) iztrans(f1)f2=z/(z-exp(-a*T)) iztrans(f2) f3=T*z/(z-1)^2 iztrans(f3) f4=z/(z-a) iztrans(f4)f5=z/((z+2)^2*(z+3)) iztrans(f5)3. 控制系统模型的建立与转化传递函数模型:num=[b1,b2,…bm],den=[a1,a2,…an],nn n mm m b s a s a b s b s b den num s G ++++++==-- 121121)( 零极点增益模型:z=[z1,z2,……zm],p=[p1,p2……pn],k=[k],)())(()())(()(2121n m p s p s p s z s z s z s ks G ------=建立系统模型65)3)(2()1()(22+++=+++=s s ss s s s s s G 和65)3)(2()1()(22+++=+++=z z zz z z z z z G 传递函数模型: num=[1,1,0] den=[1,5,6] T=0.1Gs1=tf(num,den) Gz1=tf(num,den,T) 零极点增益模型: z=[0,-1] p=[-2,-3] k=[1] T=0.1Gs2=zpk(z,p,k) Gz2=zpk(z,p,k,T)传递函数模型和零极点增益模型相互转化 传递函数模型转化零极点增益模型: num=[1,1,0] den=[1,5,6] T=0.1Gs1=tf(num,den) Gz1=tf(num,den,T) [z,p,k]=tf2zp(num,den) Gs2=zpk(z,p,k) Gz2=zpk(z,p,k,T)零极点增益模型转化传递函数模型: z=[0,-1] p=[-2,-3] k=[2] T=0.1Gs1=zpk(z,p,k) Gz1=zpk(z,p,k,T)[num,den]=zp2tf(z',p',k) Gs2=tf(num,den) Gz2=tf(num,den,T)建立系统模型)84)(2()22)(1()(222++++++=s s s s s s s G 和)84)(2()22)(1()(222++++++=z z z z z z z G num1=[1,1]num2=[1,2,2] den1=[1,0,2] den2=[1,4,8]num=conv(num1,num2) den=conv(den1,den2) T=0.1Gs1=tf(num,den) Gz1=tf(num,den,T) [z,p,k]=tf2zp(num,den) Gs2=zpk(z,p,k) Gz2=zpk(z,p,k,T)四、 实验步骤1. 根据参考程序,验证采样定理、拉氏变换和Z 变换、控制系统模型建立的方法2. 观察记录输出的结果,与理论计算结果相比较3. 自行选则相应的参数,熟悉上述的各指令的运用方法五、 实验数据及结果分析记录输出的数据和图表并分析 T=0.05时,幅度曲线和幅频曲线0.050.10.150.20.250.30.350.40.450.501234500.050.10.150.20.250.30.350.40.450.50123450.050.10.150.20.250.30.350.40.450.5012345-50-40-30-20-10102030405000.10.20.30.40.5T=0.1时,幅度曲线和幅频曲线拉氏变换结果: 反拉氏变换结果: f1 = f1= exp(-a*t) 1/s ans = ans= 1/(s+a) 1 f2 = f2 =t 1/(s+a) ans = ans =1/s^2 exp(-a*t) f3 = f3 = t*exp(-a*t) 1/s^2 ans = ans= 1/(s+a)^2 t f4 = f4=sin(w*t) w/(s^2+w^2) ans = ans=w/(s^2+w^2) sin(w*t) f5 = f5 =0 0.0 0. 0.1 0. 0.2 0. 0.30. 0.4 0.1 2 3 4 5 -5-4 -3 -2 -1 01 2 3 4 50 0. 0. 0. 0.0.0.05 0.10.15 0.20.25 0.30.35 0.40.45 0.50 1 2 3 4 50.05 0.10.15 0.20.25 0.30.35 0.40.45 0.50 1 2 3 4 5exp(-a*t)*cos(w*t) 1/s/(s+2)^2/(s+3) ans = ans =(s+a)/((s+a)^2+w^2) 1/12+(-1/2*t+1/4)*exp(-2*t)-1/3*exp(-3*t)s ω=200时, s ω=400时,Z 变换: 反Z 变换: f1 =f1 = exp(-a*k*T) z/(z-1) ans = ans = z/exp(-a*T)/(z/exp(-a*T)-1) 1 f2 = f2 =k*T z/(z-exp(-a*T)) ans = ans =T*z/(z-1)^2 exp(-a*T)^n f3 = f3 =k*T*exp(-a*k*T) T*z/(z-1)^2 ans = ans = T*z*exp(-a*T)/(z-exp(-a*T))^2 T*n f4 = f4 = sin(a*k*T) z/(z-a) ans = ans = z*sin(a*T)/(z^2-2*z*cos(a*T)+1) a^n f5 = f5 =a^k z/(z+2)^2/(z+3) ans = ans =z/a/(z/a-1) -(-2)^n-1/2*(-2)^n*n+(-3传递函数模型: 零极点增益模型: Transfer function: Zero/pole/gain:s^2 + s s (s+1) ------------- ----------- s^2 + 5 s + 6 (s+2) (s+3) Transfer function: Zero/pole/gain:-400-300-200-100010020030040005101520253035-400-300-200-1000100200300400246810121416z^2 + 5 z + 6 z (z+1) Sampling time: 0.1 -----------(z+2) (z+3)Sampling time: 0.1系统模型:num =1 3 4 2den =1 4 10 8 16T =0.1000Transfer function:s^3 + 3 s^2 + 4 s + 2-------------------------------s^4 + 4 s^3 + 10 s^2 + 8 s + 16Transfer function:z^3 + 3 z^2 + 4 z + 2-------------------------------z^4 + 4 z^3 + 10 z^2 + 8 z + 16Sampling time: 0.1z =-1.0000 + 1.0000i-1.0000 - 1.0000i-1.0000p =-2.0000 + 2.0000i-2.0000 - 2.0000i-0.0000 + 1.4142i-0.0000 - 1.4142ik =1Zero/pole/gain:(s+1) (s^2 + 2s + 2)--------------------------(s^2 + 2) (s^2 + 4s + 8)Zero/pole/gain:(z+1) (z^2 + 2z + 2)--------------------------(z^2 + 2) (z^2 + 4z + 8)Sampling time: 0.1实验二 基于Matlab 的控制系统仿真一、 实验目的1. 学习使用Matlab 的命令对控制系统进行仿真的方法2. 学习使用Matlab 中的Simulink 工具箱进行系统仿真的方法二、 实验器材 x86系列兼容型计算机,Matlab 软件 三、实验原理1. 控制系统命令行仿真建立如图所示一阶系统控制模型并进行系统仿真。
计算机控制技术实验报告(DOC)
计算机控制技术实验报告实验一信号的采样与保持一、实验目的1.熟悉信号的采样和保持过程。
2.学习和掌握香农(采样)定理。
3.学习用直线插值法和二次曲线插值法还原信号。
二、实验设备PC 机一台,TD-ACS实验系统一套,i386EX 系统板一块。
三、实验原理香农(采样)定理:若对于一个具有有限频谱(max ωω<)的连续信号)(t f 进行采样,当采样频率满足max 2ωω≥s时,则采样函数)(t f *能无失真地恢复到原来的连续信号)(t f 。
max ω为信号的最高频率,s ω为采样频率。
四.实验内容1.采样与保持编写程序,实现信号通过 A/D 转换器转换成数字量送到控制计算机,计算机再把数字量送到 D/A 转换器输出。
实验线路图如图2-1所示,图中画“○”的线需用户在实验中自行接好,其它线系统已连好。
STR /OE EOC CLOCKIN7AB CD0 ┆D7+5V i386EX CPU24MHzTMROUT1INT3(主8259IRQ7)TMRCLK1WR#CLK2 M/IO# A0XD0┆XD7OUT1/IOY01MHz 分频模数转换单元控制计算机/CS /WR A0OUT1D0┆ D7 /IOY1/IOWIRQ7数模转换单元正弦波OUT图2-1 采样保持线路图控制计算机的“OUT1”表示386EX 内部1#定时器的输出端,定时器输出的方波周期=定时器时常,“IRQ7”表示386EX 内部主片8259的“7”号中断,用作采样中断。
正弦波单元的“OUT ”端输出周期性的正弦波信号,通过模数转换单元的“IN7”端输入,系统用定时器作为基准时钟(初始化为10ms ),定时采集“IN7”端的信号,转换结束产生采样中断,在中断服务程序中读入转换完的数字量,送到数模转换单元,在“OUT1”端输出相应的模拟信号。
由于数模转换器有输出锁存能力,所以它具有零阶保持器的作用。
采样周期T= TK×10ms ,TK 的范围为01~ FFH ,通过修改TK 就可以灵活地改变采样周期,后面实验的采样周期设置也是如此。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、 实验目的(1)对PID 数字控制的改进算法用MATLAB 进行仿真。
二、 实验内容1、积分分离PID 控制算法在普通PID 控制中,积分的目的是为了消除误差提高精度,但在过程的启动、结束或大幅度增减设定是,短时间内系统输出有很大偏差,会造成PID 运算的积分积累,致使控制量超过执行机构可能允许的最大动作范围对应的极限控制量,引起系统较大的超调,甚至引起系统较大的振荡,这在生产中是绝对不允许的。
积分分离控制基本思路是,当被控量与设定值偏差较大时,取消积分作用,以免由于积分作用使系统稳定性降低,超调量增大;当被控量接近给定值时,引入积分控制,以便消除静差,提高控制精度。
其具体实现步骤是:1) 根据实际情况,人为设定阈值ε>0;2) 当ε>)(k e 时,采用PD 控制,可避免产生过大的超调,又使系统有较快的响应; 3) 当ε≤)(k e 时,采用PID 控制,以保证系统的控制精度。
积分分离算法可表示为:∑=--++=kj di p Tk e k e k T j e k k e k k u 0)1()()()()(β式中,T 为采样时间,β为积分项的开关系数,⎩⎨⎧>≤=ξξβ|)(|0|)(|1k e k e仿真1 设备控对象为一个延迟对象160)(80+=-s e s G s,采样周期为20s ,延迟时间为4个采样周期,即80s 。
输入信号r(k)=40,控制器输出限制在[-110,110]。
3,005.0,8.0===d i p k k k被控对象离散化为)5()2()1()2()(-+--=k u num k y den k y仿真方法:仿真程序:ex9_1.m 。
当M=1时采用分段积分分离法,M=2时采用普通PID 控制。
%Integration Separation PID Controller clear all ; close all ; ts=20; %Delay plantsys=tf([1],[60,1],'inputdelay',80); dsys=c2d(sys,ts,'zoh'); [num,den]=tfdata(dsys,'v');u_1=0;u_2=0;u_3=0;u_4=0;u_5=0;y_1=0;y_2=0;y_3=0;error_1=0;error_2=0;ei=0;% M=1分段积分分离,M=2普通PIDdisp('M=1--Using integration separation,M=2--Not using integration separation')M=input('whether or not use integration separation method:')for k=1:1:200time(k)=k*ts;%输出信号yout(k)=-den(2)*y_1+num(2)*u_5;rin(k)=40;error(k)=rin(k)-yout(k);ei=ei+error(k)*ts;%积分项输出if M==1 %使用分段积分分离if abs(error(k))>=30&abs(error(k))<=40beta=0.3;elseif abs(error(k))>=20&abs(error(k))<=30beta=0.6;elseif abs(error(k))>=10&abs(error(k))<=20beta=0.9;elsebeta=1.0;endelseif M==2beta=1.0;endkp=0.80;ki=0.005;kd=3.0;u(k)=kp*error(k)+kd*(error(k)-error_1)/ts+beta*ki*ei;if u(k)>=110 % 控制信号限幅u(k)=110;endif u(k)<=-110u(k)=-110;endu_5=u_4;u_4=u_3;u_3=u_2;u_2=u_1;u_1=u(k); y_3=y_2;y_2=y_1;y_1=yout(k);error_2=error_1;error_1=error(k);endfigure(1);plot(time,rin,'b',time,yout,'r');xlabel('time(s)');ylabel('rin,yout');figure(2);plot(time,u,'r');xlabel('time(s)');ylabel('u');将仿真获得结果的截图附于如下空白处:(1)M=1时输入输出信号仿真图:图1-1 M=1时输入输出信号M=1时控制信号仿真图:图1-2 M=1时控制信号(2)M=2时输入输出信号仿真图:图1-3 m=2时输入输出信号M=2时控制信号仿真图:图1-4 M=2时控制信号仿真结果分析:积分饱和的防止方法有积分分离法和预限削弱法。
积分作用使系统稳定性降低,超调量增大。
比较仿真结果,当被控量与设定值偏差较大时,删除积分作用,以使∑=kj j e 0)(不至过大。
只有当)(k e 较小时方引入积分作用,以消除静差,提高控制精度,控制量不宜进入饱和区。
2、抗积分饱和PID 控制算法所谓积分饱和是指若系统存在一个方向的偏差,PID 控制器的输出由于积分作用的不断累加而加大,从而导致执行机构达到极限位置Xmax ,若控制器输出u(k)继续增大,阀门开度不可能在增大,此时就称计算机输出控制超出正常运行范围而进入了饱和区。
一旦系统出现反向偏差,u(k)逐渐从饱和区推出。
进入饱和区越深,则退出饱和区所需时间越长。
在这段时间内,执行机构仍停留在极限位置而不能随偏差反向立即作出相应的改变,这时系统就像失去控制一样,造成控制性能恶化。
这种现象称为积分饱和现象或积分失控现象。
抗积分饱和的思路是,在计算u(k)时,首先判断上一时刻的控制量u(k-1)是否已超出限制范围。
若u(k-1)>u max ,则只累加负偏差;若u(k-1)<u min ,则只累加正偏差。
这种算法可以避免控制量长时间停留在饱和区。
仿真2 设被控对象为ss s s G 1047035.87523500)(23++=,采样周期1ms 。
输入r(k)=30, 0,9,85.0===d i p k k k仿真方法:仿真程序:ex10.m 。
M=1时采用抗积分饱和算法,M=2时采用普通PID 算法。
%PID Controler with intergration sturation clear all ; close all ;ts=0.001;sys=tf(5.235e005,[1,87.35,1.047e004,0]); dsys=c2d(sys,ts,'z'); [num,den]=tfdata(dsys,'v');u_1=0.0;u_2=0.0;u_3=0.0; y_1=0;y_2=0;y_3=0;x=[0,0,0]';error_1=0;um=6;%控制信号限幅值kp=0.85;ki=9.0;kd=0.0; rin=30; %Step Signal% M=1抗积分饱和,M=2普通PIDdisp('M=1--Using intergration sturation,M=2--Not using iintergration sturation')M=input('whether or not use integration separation method:') for k=1:1:800 time(k)=k*ts;u(k)=kp*x(1)+kd*x(2)+ki*x(3); % PID Controllerif u(k)>=umu(k)=um;endif u(k)<=-umu(k)=-um;end%Linear modelyout(k)=-den(2)*y_1-den(3)*y_2-den(4)*y_3+num(2)*u_1+num(3)*u_2+num(4 )*u_3;error(k)=rin-yout(k);if M==1 %Using intergration sturationif u(k)>=umif error(k)>0alpha=0;elsealpha=1;endelseif u(k)<=-umif error(k)>0alpha=1;elsealpha=0;endelsealpha=1;endelseif M==2 %Not using intergration sturationalpha=1;end%Return of PID parametersu_3=u_2;u_2=u_1;u_1=u(k);y_3=y_2;y_2=y_1;y_1=yout(k);error_1=error(k);x(1)=error(k); % 计算比例项x(2)=(error(k)-error_1)/ts; % 计算微分项x(3)=x(3)+alpha*error(k)*ts; % 计算积分项xi(k)=x(3);endfigure(1);subplot(311);plot(time,rin,'b',time,yout,'r');xlabel('time(s)');ylabel('Position tracking'); subplot(312);plot(time,u,'r');xlabel('time(s)');ylabel('Controller output'); subplot(313);plot(time,xi,'r');xlabel('time(s)');ylabel('Integration');将仿真获得结果的截图附于如下空白处:(1)M=1时采用抗积分饱和算法的仿真图:图2-1 M=1时采用抗积分饱和算法(2)M=1时采用抗积分饱和算法的仿真图:图2-2 M=2时采用抗积分饱和算法仿真结果分析:比较仿真结果知,采用普通的算法时,积分项的存在,有时可能会引起积分饱和,增加系统的调整时间和超调量,而采用了抗积分饱和的方法,可以消除静态误差,使控制量不易进入饱和区,即使进入了,也能较快,系统的输出特性得到了一定改善。