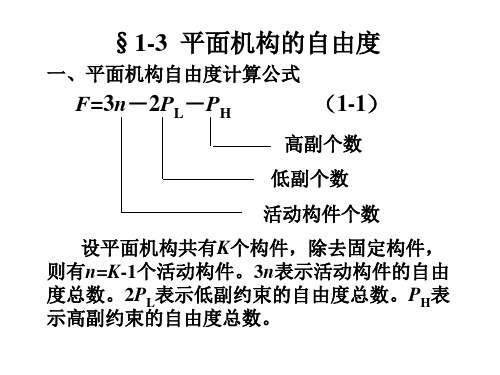
第二章 曲柄摇杆机构、四杆机构设计
速度瞬心、第二章 曲柄摇杆机构
b)以移动副相联的构件1、2, 因两构件上任一重合点间的相 对速度方向均平行于导路故其 瞬心P12 位于垂直导路方向的无 穷远处。 c)当两构件组成纯滚动高副
时,接触点相对速度为零,接
触点即为瞬心点P12。
d) 当两构件组成滑动兼滚动高 副时,因两构件接触点K 处的相 对速度必沿高副公切线方向,故 瞬心P12 一定位于高副公法线n-n 上,具体位置与相对速度 vK1K2 大小有关。 2、三心定理法 三心定理:作平面 运动的三个构件有三个 瞬心,且三个瞬心必在 同一直线上。
铰链四杆机构的机架和连杆总是存在的,因 此,按照连架杆是曲柄还是摇杆可把铰链四杆机 构分为: 曲柄摇杆机构、双曲柄机构、 双摇杆机构。
平面连杆机构的缺点是: 1 (1)运动链较长时机构的误差积累较大;
1
1 1
(2)运动副磨损后,运动副间隙难以补偿;
(3)连杆作平面复合运动,其惯性力(矩)不 因此,连杆机构不能精确实现预定的连续运
易平衡。 动轨迹和运动规律,只能在一些离散点上精确满
足设计要求。此外,连杆机构常用于速度不高的
场合。
§2-1 铰链四杆机构的基本型式和特性
P14
还有两个瞬心P13和P24不能直接确定。需采用 三心定理来确定。
构件1、2、3 的三 个瞬心,P13、P12、P23 应位于同一直线上;
构件1、4、3 的三 个瞬心P13、P14 、P34也 应位于同一直线上。 因此,瞬心P13 一定在P12P23和P14P34两直线 的交点处。
同理,构件2、1、4的三个瞬心在直线P14P12 上, 构件2、3、4 的三个瞬心在直线 P34P23 上,所以交 点就是瞬心P24。
机构速度分析的图解法,有速度瞬心法和矢量方程图 解法等。本节讲解速度瞬心法在平面简单机构上的应用。 一、速度瞬心
第二章_铰链四杆机构
刮雨器
公共汽车车门启闭机构
公共汽车车门启闭机构
铲土机为了 保证铲斗平行移 动,防止泥土流 出,采用了平面 连杆机构。
认识一 下吧
认识一下吧
本章要解决的问题
铰链四杆机构是如何改变或传递运动的? 杆与杆之间是怎么连接的? 它的工作特性是什么?
一、铰链四杆机构的组成
A1
O1
2
B
3
4
O2
铰链四杆机构:
全部用转动副相 连的平面四杆机构。 它是平面四杆机构的 基本型式之一,其它 型式的四杆机构可看 作是在它的基础上通 过演化而成的。
机架 连杆 连架杆
机构的固定构件 不直接与机架连接的构件 与机架用转动副相连接的构件
2 3
1 4
连架杆可分为
曲柄:能绕机 架作整周转动 的连架杆
双曲柄插床
双摇杆机构 特点:
两个连架杆均为摇杆 。
车轮转向机构:
四杆件构成等 腰梯形,按箭 头方向牵动摇 杆AB的延伸 端E,可使两 摇杆AB,CD 同向摆动并带 动两轮同时转 向。
飞机起落架
飞机起落架
汽车自卸翻斗装置
判断下图铰链四杆机构类型
小结
1、铰链四杆机构的组成
机架 连杆 连架杆
什么叫铰链?
一物体A套在另一物体B 的一部分C上,物体 A的运动受到C的限制,但A可以绕C在平面 或空间内(C为球形)转动,物体A与B就构 成铰链
.
生活中的铰链
铰链四杆机构在生活、生产中广泛用于动力 的传递或改变运动的形式,例如公共汽车门 的开启,汽车前窗刮雨器等都是利用铰链四 杆机构来完成工作任务的。
曲柄 摇杆
2、铰链四杆机构的分类
(按连架杆运动形式不同分)
四杆机构的设计步骤和方法
温馨小提示:本文主要介绍的是关于四杆机构的设计步骤和方法的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇四杆机构的设计步骤和方法能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)阅读本篇文章之前,本店铺提供大纲预览服务,我们可以先预览文章的大纲部分,快速了解本篇的主体内容,然后根据您的需求进行文档的查看与下载。
四杆机构的设计步骤和方法(大纲)一、四杆机构概述1.1四杆机构简介1.2四杆机构的应用领域二、四杆机构设计步骤2.1确定设计目标2.2分析四杆机构类型2.3确定机构参数2.4选择合适的材料2.5计算运动与动力参数2.6进行仿真分析与优化三、四杆机构设计方法3.1几何法3.1.1尺度法3.1.2位置法3.2解析法3.2.1矩阵法3.2.2微分方程法3.3计算机辅助设计方法3.3.1CAD软件3.3.2仿真软件四、四杆机构设计实例4.1曲柄摇杆机构设计实例4.2双曲柄机构设计实例4.3双摇杆机构设计实例五、四杆机构设计注意事项5.1运动副间隙的考虑5.2刚度与强度的校核5.3疲劳寿命分析5.4安全系数的选择六、四杆机构设计总结与展望6.1设计成果总结6.2存在问题与改进方向6.3未来发展趋势与应用前景一、四杆机构概述以下是对四杆机构设计步骤和方法中的四杆机构概述部分的撰写:1.1 四杆机构简介四杆机构是由四个杆件组成的机械系统,它们通过关节连接在一起。
这四个杆件分别是:曲柄、连杆、摇杆和机架。
四杆机构根据其结构特点和运动特性,可以分为多种类型,如直动四杆机构、摆动四杆机构、转动四杆机构等。
四杆机构在工程应用中具有广泛的应用前景,其设计和研究在机械工程领域具有重要意义。
曲柄摇杆机构设计方法完整版
曲柄摇杆机构设计方法HEN system office room [HEN 16H-HENS2AHENS8Q8-HENH1688]曲柄揺杆机构设计方法作者姓名:XXXX专业名称:机械工XXXX及自动化指导教师:XXXX 讲师摘要曲柄摇杆机构中构件的运动样式多样,可以实现给定运动规律或运动轨迹且承载能力高、耐磨顺,制造简单,已于获得较高的制造精度,因此曲柄摇杆机构在各种机械仪器中获得广泛的应用。
本文针对曲柄摇杆机构的行XXXX速度变化速度系数和给定点的轨迹设计曲柄摇杆机构,通过深入分析机构的行XXXX数度比k、摇杆摆动角0、最小传动角,极为夹角和摇杆摆动角等运动性能参数与结构尺寸间的关系。
通过引入曲柄固定较链点的位置角建立了曲柄摇杆和机架长度关于&和0的显示函数关系,通过解析法、儿何作图法、和实验法设计曲柄摇杆机构。
在此基础上研究机构设汁的可能附加要求极其相应的设汁方法为曲柄摇杆设计提供各种可能选项并对曲柄摇杆的急回特性和死点悄况进行说明。
关键词:曲柄摇杆机构行XXXX速度系数摇杆摆动设计方法AbstractThe diversity of movement component in the crank rocker mechanism can achieve given amotion or motion trajectory and have the high bearing capacity, wear-resisting, simple manufacture,and higher manufacturing accuracy・ therefore ,the crank rocker mechanism is widely used in various mechanical instrument・In view of the crank rocker mechanism of velocity fluctuation velocity coefficient and the design of crank rocker mechanism by track point, Analysis the mechanism of the stroke number ratio K , the rocker swing angle minimum transmission angle, extremely angle and rocker swing angle motion parameter and the relationship between structure size deeply. Introduced the crank fixed hinge point position angle of crank rocker and the frame length on and display function is built, by the analytic method, the geometric drawing method, the design of crank rocker mechanism and experimental method・ On the basis of the research on the design method of mechanism design may have additional requirements and other extremelycorresponding , various possible options and the crank rocker quick return characteristics and the dead are described for crank and rocker design.Key words : crank, rocker, travel speed, design目录II1绪论18世纪下半叶的笫一次工业革命促进机械工XXXX的迅速发展,机构学在原来机械力学的基础上发展成为一门独立的科学.早在19世纪连杆机构就已经广泛的运用最简单的就是四杆机构,也是出现最早的一种连杆机构。
4四杆机构2
枣庄科技职业学院教案首页
枣庄科技职业学院教案续页
特点:可以实现转动和往复移动的变换。
应用:活塞式内燃机、空气压缩机、冲床等机械等。
应用实例:回转式油泵(转动导杆机构)牛头刨床的主体机构(摆动导杆机构)
为原动件绕点转动时,滑块
或称为摆动滑块机构。
应用:各种摆动式原动机和工作机中。
摆缸式液压泵、卡车车箱自动翻转卸料机构。
应用实例:手压抽水机、抽油泵等。
四杆机构存在曲柄的条件和几个基本概念
二、平面四杆机构的运动特性
1、平面四杆机构的极位
曲柄摇杆机构、摆动导杆机构和曲柄滑块机构中,当曲柄为原动件时,从动件往复摆动或往复移动,存在左、右两个极限位置,称为极位。
机构工作件返回行程速度大于工作行程的特性。
返回行程时:V2=C1C2/t2
为了表示工作件往复运动时的急回程度,用V2和V1的比值K来描述。
θ+0
180
在不计摩擦力、惯性力和重力时,从动件所受的力
t=Fcosa
r=Fsina a愈小,机构传动性能愈好。
连杆与从动件所夹的锐角γ。
γ=90°-a,γ越大,机构的传动性能越好,设计时°,对于高速大功率机械应使γ≥50。
第二章 铰链四杆机构
2.平面四杆机构的极限位置
曲柄摇杆机构、摆动导杆机构和曲柄滑块机构中,当曲柄为原 动件时,从动件作往复摆动或往复移动,存在左、右两个极限位置, 如图6-17所示。内燃机活塞连杆机构中活塞的上止点和下止点即曲 柄滑块机构的两极限位置。
3.压力角和传动角
在不计摩擦力,惯性力和重力时,从动件上受力点的速度方向与所 受作用力方向之间所夹的锐角,称为机构的压力角,用a表示。
图6-6所示的机车驱动轮 联动机构是正平行双曲柄机构 的应用实例。图6-7所示为车 门启闭机构,是反平行双曲柄 机构的一个应用,它使两扇车 门朝相反的方向转动,从而保 证两扇门能同时开启或关闭。
在正平行双曲柄机构中, 当各构件共线时,可能出现从 动曲柄与主动曲柄转向相反的 现象,即运动不梯形;当汽车 转弯时,两摇杆摆过不同的角 度,使两前轮转动轴线汇交于 后轮轴线上的O点,以确保车 辆转弯的每一瞬时,四个轮子 与地面之间均绕O点作纯滚动。
A、曲柄 B、连杆 C、摇杆 D、机架
3、能够实现回转运动与直线往复运动转换的平面四杆机构是—— —— 。
A、曲柄摇杆机构 B、曲柄滑块机构 C、导杆机构 D、摇 块机构
4、曲柄滑块机构当以————为主动件时,会出现“死点”现象。
A、曲柄 B、滑块 C、连杆
5、将曲柄摇杆机构的————长度取无穷大时,曲柄摇杆机构 中的————将转化为沿直线运动的滑块,成为曲柄滑块机构。
曲柄滑块机构的演化过程:
曲柄滑块机构的性质:
曲柄滑块机构的应用:
2.导杆机构
若将图6-9所示的曲柄滑块机构的构件作为机架,则曲柄滑块机构就 演化为导杆机构,连架杆对滑块的运动起导向作用,称为导杆,它包括 转动导杆机构和摆动导杆机构两种形式。如图6-10所示,导杆均能绕机 架作整周转动,称为转动导杆机构。如图 6-11所示,导杆4只能在某一角度内 摆动,称为摆动导杆机构。导杆机构 具有很好的传力性能,常用于插床、 牛头刨床和送料装置等机器中。
铰链四杆机构三种基本形式

目录
content
工业中铰链四杆机构有很多种,现总 结归纳为以下三种基本形式:
01
一、曲柄摇杆机构
02
二、双曲柄机构
03
三、双摇杆摇 杆的铰链四杆机构。 作用:将主动件(曲柄)的整周回转 运动转换成从动件(摇杆)的往复摆 动。
动态图
实物图
动态图
02
二、双曲柄机构
两个连架杆都为曲柄的铰链四杆 机构。 作用:将主动曲柄作的等速转 动 转变为从动曲柄的变速转动。
动态图
实物图
动态图
03
三、双摇杆机构
两个连架杆都为摇杆的铰链 四杆机构。 作用:将主动摇杆的往复摆动 转变为从动摇杆的往复摆动。
动态图
实物图
动态图
小结
名称
铰链四杆机构三种类型对比
组成
运动特点
实例
曲柄 摇杆机构 双曲柄机构
双摇杆机构
机架 连杆 曲柄 摇杆
曲柄连续转动 摇杆往复摆动
机架 连杆 两曲柄
主动曲柄连续转动 从动曲柄连续转动
机架 连杆 两摇杆
主动摇杆往复摆动 从动摇杆往复摆动
雷达 调整机构
机车轮 转动机构
港口 起吊机构
机械原理 第2章-连杆机构
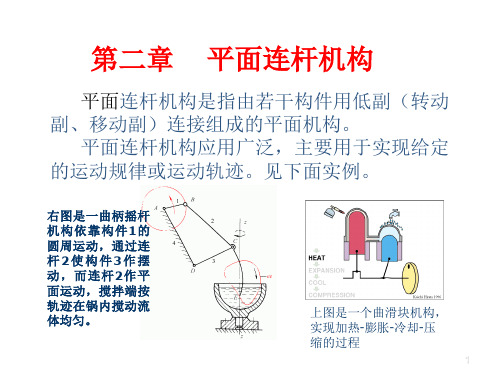
图2-8a
图2-8b
内燃机内的核心构件活塞、连杆、曲轴和缸套就 是曲柄滑块机构。其活塞就是滑块,缸体就相当 于上图的机架,它的制造要求十分精密。
22
2、导杆机构
图2-9(a)就是和图2-8一样的曲柄滑块机构。但如果改AB杆(1杆)为 机架,就变为图(b)所示的导杆机构。在图(b)中,杆4称为导杆,滑 块3相对导杆滑动并一起绕 A点转动,通常把杆2作为原动件。在图(b) 中,由于L1<L 2,两连架杆2 和4 均可相对于机架 1整周回转,称为曲柄转 动导杆机构或转动导杆机构。 但图(b)中如果L1>L2,则图(b)就变成为图2-10了,此时连架杆4 就只能往复摆动,称为曲柄摆动导杆机构或摆动导杆机构。摆动导杆机 构在牛头刨床中应用较多,其简图见右下图。
〖1〗最短杆的对边作为机架,两连架杆就是二个摇杆。 〖2〗这时最短杆与最长杆长度之和不论小于或大于其余两杆长度之和都只 能得到双摇杆机构,且有,如果最短杆和最长杆长度之和大于其余两杆长 度之和,无论哪个构件作机架都只能得到双摇杆机构。
18
(3)双摇杆机构的应用
双摇杆机构有广泛的应用。如下面二图中都是由摇杆机构组成,它们 都是把最短边BC的对边AD作机架。请注意它们的运动轨迹,对左图鹤式 起动机,它能使E点沿水平线EE’移动,这对吊放物体很有利;而对于右 图飞机起落架,放下时ABC成一线,保证了稳定,收起时轮胎成水平,节 约了空间。这些设计十分巧妙,这是我们要学习的。
图2-2e
图2-2e1
图2-2e2 机车车轮联动机构
16
(3)双曲柄机构的应用 双曲柄机构也有一定的应用,如下面惯性筛就是一种, 但用的最多是平行四边形机构,所以又叫平行双曲柄机构。 下面的摄影平台升降机构,就是利用了平行四边形机构运 动中,构件始终保持水平的特点,使人站在上面不觉得倾 斜。
第二章-曲柄摇杆机构、四杆机构设计

1 为保证机构的传力性能良好,
应使最小传动角γmin≥ 。 一般许用值 =40°~50°。
重载大功率时取大值。
曲柄摇杆机构中, 最小传动角γmin 总是发 生于曲柄与机架共线 和重叠共线的两位置 之一,如图所示。 (具 体证明见P30页)
急回运动特性可用行程速度变化系数(也称 行程速比系数)K 表示。
v2
C1C2/t2
t1
1
180°+θ
K=──=────=──=──=───── (2-1)
v1
C1C2/t1
t2
2
180°-θ
θ ──摇杆处于两极限
位置时,对应的曲
柄所夹的锐角,称
为极位夹角。
K 值越大,急回 特性愈明显。一般机 械中,1≤K≤2。
l1+l4≤l2+l3
(2-4)
l1+l3≤l2+l4
(2-5)
l1+l2≤l4+l3
(2-6)
l1 ≤ l2 l1 ≤ l4 即杆1最短。 l1 ≤ l3
由此可得铰链四杆机构有整转副的条件是:
(1) 整转副是由最短杆与其邻边组成的;
(1) 整转副是由最短杆与其邻边组成的; (2) 最短杆与最长杆长度之和,应小于或等于 其余两杆长度之和。
二、导杆机构
导杆机构是改变曲柄滑块机构中的固定构 件而演化来的。如图a 所示的曲柄滑块机构, 若改取杆1为固定构件, 即得图b 所示导杆机构。 杆4 称为导杆。滑块3 相对导杆滑动并一起绕 A点转动。通常取杆2 为原动件。
导杆机构的的特点:
传动角始终等 于90°。具有很好 的传力性能,故常 用于牛头刨床、插 床和回转式油泵之 中。验法源自作图法直观,解析法精确,实验法简便。
曲柄摇杆机构设计方案
例题3:已知一翻料机构,连杆长BC=400mm, 连杆两个位置关系试设计此四 杆机构。
人有了知识,就会具备各种分析能力, 明辨是非的能力。 所以我们要勤恳读书,广泛阅读, 古人说“书中自有黄金屋。 ”通过阅读科技书籍,我们能丰富知识, 培养逻辑思维能力; 通过阅读文学作品,我们能提高文学鉴赏水平, 培养文学情趣; 通过阅读报刊,我们能增长见识,扩大自己的知识面。 有许多书籍还能培养我们的道德情操, 给我们巨大的精神力量, 鼓舞我们前进。
已知摇杆cd的长为75mm行程速比系数k15机架ad长度为100mm又知摇杆的一个极限位置与机架间的夹角等于45度
例题1:试设计一曲柄滑块机构。已知其 滑块的行程速比系数K=1.5,滑块的冲程 H=50mm,偏距e=10mm。
例题2:设计一铰链四杆机构。已知摇杆 CD的长为75mm,行程速比系数K=1.5,机 架AD长度为100mm,又知摇杆的一个极限 位置与机架间的夹角等于45度。试用图解 法求其曲柄AB和连杆BC的长度。
机械设计课程设计四杆机构

机械设计课程设计四杆机构一、课程目标知识目标:1. 学生能够理解并掌握四杆机构的基本概念、分类和运动特性。
2. 学生能够运用四杆机构的运动原理,分析并解决实际问题。
3. 学生能够了解四杆机构在机械设计中的应用及发展。
技能目标:1. 学生能够运用图示法和计算法分析四杆机构的运动。
2. 学生能够设计简单的四杆机构,并运用CAD软件绘制其结构图。
3. 学生能够运用所学的四杆机构知识,进行创新设计并制作模型。
情感态度价值观目标:1. 学生能够认识到机械设计在工程技术领域的重要性,培养对机械设计的兴趣。
2. 学生能够通过团队合作,培养沟通、协作和解决问题的能力。
3. 学生能够关注机械设计领域的发展,树立创新意识,提高自身综合素质。
课程性质:本课程为机械设计课程的设计实践环节,强调理论联系实际,培养学生的动手能力和创新能力。
学生特点:学生已具备一定的机械基础知识和制图技能,具有较强的学习兴趣和求知欲。
教学要求:结合学生特点和课程性质,注重启发式教学,引导学生主动参与,培养实际操作能力。
将课程目标分解为具体的学习成果,以便进行有效的教学设计和评估。
二、教学内容1. 四杆机构基本概念:四杆机构的定义、分类及其应用场景。
教材章节:第二章第三节2. 四杆机构的运动特性:曲柄摇杆机构、双曲柄机构、摆线机构等运动原理及特点。
教材章节:第二章第四节3. 四杆机构的设计方法:图示法、计算法及其在实际中的应用。
教材章节:第三章第一节、第二节4. 四杆机构的创新设计:结合实际需求,运用所学知识进行创新设计。
教材章节:第三章第三节5. CAD软件在四杆机构设计中的应用:利用CAD软件绘制四杆机构结构图。
教材章节:第四章第二节6. 四杆机构模型的制作:分组进行四杆机构模型制作,巩固所学知识。
教材章节:第四章第三节教学内容安排与进度:1. 第1周:四杆机构基本概念、分类及其应用场景。
2. 第2周:四杆机构的运动特性。
3. 第3周:四杆机构的设计方法。
机械设计基础(原理)填空题(附答案)

《机械设计基础》原理部分填空第一章自由度1、两构件直接接触并能产生一定相对运动的联接称为运动副,按照其接触特性,又可将它分为低副和高副。
两构件通过面接触组成的运动副称为低副;平面机构中又可将其分为回转副和移动副。
两构件通过点或直线接触组成的运动副称为高副。
2 平面机构具有确定运动的条件是自由度等于原动件个数,且自由度>0。
第二章四杆机构1、铰链四杆机构中的固定件称为机架,与其用回转副直接相连接的构件称为连架杆,不与固定件相连接的构件称为连杆。
按照连架杆是曲柄还是摇杆,可将铰链四杆机构分为三种基本型式曲柄摇杆机构、双曲柄机构和双摇杆机构。
2、平面机构中,压力角越小,则传动角越大,机构的传动性能越好。
导杆机构的传动角是900,压力角是00,其传力性能很好。
曲柄摇杆机构中,当摇杆为主动件时,在曲柄和连杆共线时,会出现死点现象。
在平面四杆机构中,极位夹角越大,则行程速比系数就越大,急回性能也越明显;若极位夹角为零,则其行程速比系数等于1 ,就意味着该机构的急回性能没有。
在连杆机构设计中,习惯上用传动角来判断传力性能。
在出现死点时,传动角等于00,压力角等于900。
在机构设计中,若要提高传动效率,须增大传动角。
3、作出三种含单个移动副的基本平面四杆机构的运动简图,并说明各种机构的名称。
第三章凸轮机构1、凸轮机构按凸轮形状可分为盘形凸轮机构、移动凸轮机构和园柱凸轮机构。
按从动件的型式可分为滚子从动件、尖顶从动件和平底从动件三种。
在图解法设计滚子从动件凸轮中,把滚子中心的轨迹称为凸轮理论轮廓;为使凸轮型线在任何位置既不变尖,更不相交,就要求滚子半径必须小于理论轮廓外凸部分的最小曲率半径。
2、凸轮机构中,从动件采用等加速等减速运动规律时,将引起柔性冲击,采用等速运动规律时,会引起刚性冲击。
选择凸轮基园半径时,要保证其压力角的要求,其它条件不变的情况下,结构越紧凑,基圆的半径越小,压力角就越大,机械效率越低。
《机械设计基础》课程讲解课件第二章第一节铰链四杆机构及其演化
2.导杆机构
取曲柄滑块机构中的不同构件作为机架,可以得到以下 四种不同的机构。
曲柄滑块机构
转动导杆机构
定块机构
摇块导杆机构
应用
小型刨床机构
曲柄摆动导杆机构 (a)曲柄摆动导杆机构; (b)电气开关
卡车车厢自动翻转卸料机构
手动抽水机
3.偏心轮机构 扩大转动副
(a)等效曲柄滑块机构 (b)曲柄滑块机构 (c)等效曲柄摇杆机构 (d) 曲柄摇杆机构
摇杆为主动件时, 则可以将摇杆的摆动转换为 曲柄的整周回转运动。
应用举例:
①牛头刨床工作台横向进给机构 ②缝纫机的踏板机构
图 7-3 缝纫机踏板机构
牛头刨床进给机构
缝纫机踏板机构
(a)局部结构图 ; (b)曲柄摇杆机构运动简图 1—主动齿轮; 2—从动齿轮; 3—连杆; 4—摇杆(棘爪);
5—棘轮; 6—丝杠 ; 7—机架
一、平面四杆机构的基本型式—铰链四杆机构
1.曲柄摇杆机构 2.双曲柄机构
3.双摇杆机构
运动副全是转动副
二、平面四杆机构的演化型式
1.曲柄滑块机构 2.导杆机构 3.偏心轮机构
一、平面四杆机构的基本型式
1.曲柄摇杆机构
☆ 两连架杆中一个为曲柄,另
一个为摇杆。
曲柄为主动件时, 可以实现由曲柄的整周回转 运动到摇杆往复摆动的运动 转换。
特点:容易加工; 工作时润滑条件和受力情况好; 可用于较重载荷的传动中。
应用举例:蒸汽机换气阀传动机构、冲压机传动机构等。
机械设计基础
第二章 平面连杆机构
第一节 铰链四杆机构及其演化 第二节 平面四杆机构的基本特性
概念
定义: 全由低副(转动副、移动副)构 成的平面机构称为平面连杆机构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这时摇杆由左极限位置C1D 摆到位置右极限位置 C2D,摆杆角度为ψ;而当曲柄顺时针再转过角 度 2 =180°-θ时,摇杆由位置C2D摆回至位 置C1D,其摆角仍然是ψ 。 虽然摇杆来回摆动 的摆角相同,但对 应的曲柄转角不等 ( 1 > 2 );当曲柄 匀速转动时,对应 的时间也不等 (t 1> t 2)。
机构的这种位置称为机构的死点位置。 死点位置对传动不利,但对夹紧和防松有 利。如图铰链四杆机构,当工件5 被夹紧时, 铰链中心B、 C、D共线,工件加在杆1上的反 作用力Fn无论多大,也不能使杆3转动。这就保 证在去掉外力F 之后, 仍能可靠地夹紧工件。 当需要取出工件时,只 需向上扳动手柄,即能 松开夹具。
(2) 取最短杆的邻边为机架时,机架上只有一 个整转副,故得曲柄摇杆机构。 (3) 取最短杆的对边为机架时,机架上没有整 转副,故得双摇杆机构。
§2-3 铰链四杆机构的演化
一、曲柄滑块机构 曲柄摇杆机构,铰链中心C的轨迹是以D为 圆心,以l3为半径的圆弧mn。若l3增至无穷大, 则 如图b所示,C点轨迹变成直线。于是摇杆3演化 为直线运动的滑块,转动副D演化为移动副,机 构演化为如图所示的曲柄滑块机构。
由于传动角γ在简图中非常直观,所以平面连杆机构 习惯于用传动角γ来表示机构的传动性能。机构工作时, 其传动角是作周期变化的。
1 为保证机构的传力性能良好, 应使最小传动角γmin≥ 。 一般许用值 =40°~50°。 重载大功率时取大值。
曲柄摇杆机构中, 最小传动角γmin 总是发 生于曲柄与机架共线 和重叠共线的两位置 之一,如图所示。 (具 体证明见P30页) 3. 死点位置 曲柄摇杆机构中,若摇杆为主 动件,当从动件与连杆共线时,机 构的传动角γ为零,此时不论驱动 力F有多大, 其有效分力 F 0 ,
急回运动特性可用行程速度变化系数(也称 行程速比系数)K 表示。 1 v2 C1C2/t2 t1 180°+θ
K=──=────=──=──=───── (2-1) 2 v1 C1C2/t1 t2 180°-θ
θ ──摇杆处于两极限
位置时,对应的曲 柄所夹的锐角,称 为极位夹角。 K 值越大,急回 特性愈明显。一般机 械中,1≤K≤2。
整转副定义:两构件能相对转动3600的转动副。 显然铰链四杆机构中曲柄就具有整转副。
曲柄摇杆机构在什麽条件具有整转副? 已知:杆1曲柄,杆2连杆, 杆3摇杆,杆4机架。 各杆长度为l1、l2、l3、 l4 。 曲柄1与杆4的夹 角 的变化范围:
0o ~360o
当摇杆处于左右权限位置时,曲柄与连杆两次 共线。此时杆1与杆2的夹角β 的变化范围为也是
定块机构Biblioteka 导杆机构摇块机构1 4 3
v3
1r1 22 r2 1 2r2 2 r1
一、曲柄摇杆机构
在铰链四杆机构中,若两个连架杆,一为曲 柄,另一个为摇杆,则此铰链四杆机构称为曲柄 摇杆机构。 通常曲柄1为原动件,并作匀速转动;而 摇杆3为从动件,作变速往复摆动。
曲柄摇杆机构的主要特性: 1.急回运动
曲柄摇杆机构中,曲柄AB在转动一周中,在B1、 B2两次与连杆BC共线,相应铰链中心 A与C之间的 距离AC1和AC2分别为最短和最长,摇杆CD的位置 C1D和C2D分别为其左右极限位置。摇杆在两极限 位置间的夹角ψ, 称为摇杆的摆角。 当曲柄由位置 AB1 顺时针转到位 置AB2 时,曲柄转 角 1 =180°+θ,
二、导杆机构 导杆机构是改变曲柄滑块机构中的固定构 件而演化来的。如图a 所示的曲柄滑块机构, 若改取杆1为固定构件, 即得图b 所示导杆机构。 杆4 称为导杆。滑块3 相对导杆滑动并一起绕 A点转动。通常取杆2 为原动件。
导杆机构的的特点: 传动角始终等 于90°。具有很好 的传力性能,故常 用于牛头刨床、插 床和回转式油泵之 中。
二、给定行程速度变化系数K设计四杆机构 曲柄摇杆机构 已知条件:摇杆长度l3,摆角ψ,行程速度变化 系数K。 设计的实质是确 定铰链中心A点的位 置和其他三杆的尺寸 l1 、 l2 和 l4 。 设计步骤:
K 1 (1) 按公式 θ 180 计算出极位夹角θ。 K 1
(2) 任选固定铰链中心D的位置,由摇杆长度
四、偏心轮机构 杆1为圆盘,其几何 中心为B,因运动时该圆 盘绕偏心A转动,故称偏 心轮。A、B之间的距离 e称为偏心距。按照相对 运动关系,可画出该机构 的运动简图,如图b 所示。 由图可知,偏心轮是回转 副B扩大到包括回转副A 而形成的,偏心距e即是 曲柄的长度。
§2-4 平面四杆机构的设计
垂直于vC 的分力F″它们的大小与角度α或γ有关, 即 有效分力F′=Fcosα=Fsinγ, 有害分力F″=Fsinα=Fcosγ 。
因此, F″越小越好,即角度α越小(或γ越大) 对机构的工作越有利。
α称为压力角,γ 称为传动角,二者 互为余角, γ =90°- α。
压力角α的定义是:不计摩擦、重力与惯性 力时,输出构件所受主动力F 的方向与输出构件 在受力点处的速度方向之间所夹的锐角。
(2-6)
- l1 ) + l4
将式(2-4)、(2-5)、(2-6)两两相加 l1 + l4 ≤ l2 + l3
(2-4)
l1 ≤ l2
l1 l1
≤
l1 + l3 ≤ l2 + l4
(2-5)
l4 l3
即杆1最短。
l1 + l2 ≤ l4 + l3
(2-6)
≤
由此可得铰链四杆机构有整转副的条件是: (1) 整转副是由最短杆与其邻边组成的;
0o ~3600
杆3为摇杆,它与相邻两杆的夹角ψ 、γ 的 变化范围小于360°。 显然,A、B为整转副, C、D不是整转副。 为了实现曲柄 1整周回转,AB杆 必须顺利通过与连 杆共线的两个位置 AB′和AB″。
当杆1处于AB′位置时,形成三角形 ACD 。 根据三角形任意两边之和必大于(极限情况下等于) 第三边的定理可得 l4≤(l2 -l1)+l3 l3≤(l2 即 l1 + l4 ≤ l2 + l3 (2-4) l1+l3≤l2+l4 (2-5) 当杆1处于AB″位置 时,形成三角形 ACD 。 可得 l1 + l2 ≤ l4 + l3
(1) 整转副是由最短杆与其邻边组成的; (2) 最短杆与最长杆长度之和,应小于或等于 其余两杆长度之和。
这两个条件必须同时满足,否则机构中不存 在整转副,无论取哪个构件作机架都只能得到双 摇杆机构。
另外,具有整转副的铰链四杆机构是否存 在曲柄,还应根据选择何杆为机架来判断。
(1) 取最短杆为机架时,机架上有两个整转副, 故得双曲柄机构。
A
(5) 作△PC1C2的外 接圆,在此圆周上 (C1C2圆弧和EF圆 弧除外) 任取一点 A作为曲柄的固定 铰链中心。连AC1 和AC2,因同一圆 弧的圆周角相等, 故 ∠C1AC2 =∠C1PC2 =θ。
(6) 因极限位置处曲柄与连杆共线,
故 AC1= l2- l1、
AC2=l2+ l1, 从而得曲柄长度:
二、双曲柄机构 两连架杆均为曲柄 的铰链四杆机构称为双 曲柄机构。
双曲柄机构功能:
原动曲柄转动(匀速)→从动曲柄转动(非 匀速或匀速) 双曲柄机构中,最常用的是平行四边形机构, 或称平行双曲柄机构。
三、双摇杆机构 两连架杆均为摇杆的铰链四杆机构称为双摇 杆机构。 原动摇杆摆动 →从动摇杆摆动
§2-2 铰链四杆机构有整转副的条件
l1=(AC2 - AC1)/2。
再以A为圆心以
l1为半径作圆,交
C1A的延线于B1,交 C 2A于B2,
即得 B1C1= B2C2= l2 及 AD= l4 。 由于A点是 △C1PC2 外接圆上任选的点,所 以仅按行程速度变化系 数K设计,可得无穷多 的解。 由于A点位置不同, 机构传动角的大小也不 同。因此设计时应按照 最小传动角最优或其他 辅助条件来确定A点的 位置。
一、平面四杆机构设计的基本问题
平面四杆机构的设计是根据工作要求(如运动要求、 传力要求、空间尺寸等)和给定的条件,选定合适的机 构型式和确定机构各构件的尺寸。一般,四杆机构的设 计中常常碰到下面两类基本问题: (1)给定从动件的运动规律(位置、速度、加速度) 设计四杆机构。 (2)给定点的运动轨迹设计四杆机构。 四杆机构设计的方法有解析法、几何作图法和实 验法。作图法直观,解析法精确,实验法简便。
令摇杆自ClD摆至C2D为工作行程,这时铰链 C的平均速度是 v1=C1C2 /tl 。 摇杆自C2D摆回至C1D是其空回行程,这时 C点的平均速度是v2=C1C2 /t2,显然v1 < v2 , 它表明摇杆具有急 回运动的特性。牛 头刨床、往复式输 送机等机械就利用 这种急回特性来缩 短非生产时间,提 高生产率。
将式(2-1)整理,可得极位夹角计算公式 K-1 θ= 180° ──── (2-2) K+1 2. 压力角和传动角
铰链四杆机构中, 原动件1受到驱动力矩Md作用时, 若不计运动副的的摩 擦和构件的惯性力(矩) 及重力,则通过二力 杆BC 作用于从动件CD 上的力F沿BC 方向, 把F力分解为沿C 点速 度vC 方向的分力F′和
l3和
摆角ψ,作出摇杆两个极限位置C1D和C2D。
(3) 连接C1和C2,并作C1M
垂直于C1C2。
(4) 作∠C1C2N=90°-θ,
C2N与C1M相交于P点, 由图可见,∠C1PC2=θ
(5) 作△PC1C2的外 接圆,在此圆周上 (C1C2圆弧和EF圆 弧除外) 任取一点 A作为曲柄的固定 铰链中心。
三、摇块机构和定块机构 若杆2为固定构件,可得图c所示摆动滑块机 构,或称摇块机构。
例如自卸卡车的车厢自动翻转卸料机构就 是一个摇块机构。
如图,当油缸3中的压力油推动活塞杆4 运动时,车厢1便绕回转副中心B倾转,当达 到一定角度时,物料就自动卸下。