优化设计试卷练习及答案汇编
八上物理优化设计答案全册
轻1.(1)m (2)mm 2.3.10 3.A
4.337.5 5.B
6.27.2mm 误差 25.2mm
知
1.A 2.A 3.A 4.B 5.B 6.B 7.A
8.cm s
9.4.8(4.6或4.7) 4.70
10.3 38 218 11.μm(微米)
12.量出三人高度相同,说明感觉有时靠不住
13.(1)先乘飞机到西安,再坐火车到重庆(合理即可)
(3)20 不能 虚
(4)略
4.4光的折射
快乐预习
Байду номын сангаас
一、1.斜射 偏折 2.法线 入射角 折射角
3.(1)向法线方向 小于
(2)也增大 也减小
(3)不变 (4)可逆
二、1.浅 2.折断 3.下方
轻松尝试
1.∠2 ∠4 增大 小于C 2.略
3.光的折射 虚像
4.虚 浅
知能演练
1.A 2.D 3.A 4.E 变高
(2)验证反射光线与入射光线、法线是否在同一平面内 (3)验证反射角与入射角的大小关系(任选其二) 11.(1)反射角和入射角的大小 靠近 (2) 证实反射光线、法线和入射光线在同一平面内 (3)反射光线、入射光线和法线在同一平面内;反射光线和 入射光线分局法线两侧;反射角等于入射角。
快乐预习
4.3平面镜成像
快
4.1光的直线传播
一、1.发光
2.直线
3.箭头 直线 径迹 箭头 方向 二、1.真空 3×108m/s 2.不同 c
轻松尝试
4.小孔成像
3c 2c 43
1.B 2.D 3.光在同种均匀介质中沿直线传播
4.C 5.大 3×108
知能演练
2024-2025学年初中同步测控优化设计物理八年级上册配人教版第4章 光现象含答案
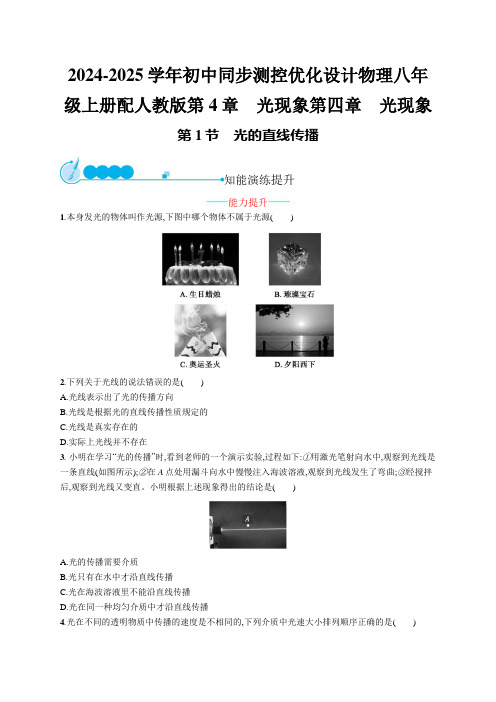
2024-2025学年初中同步测控优化设计物理八年级上册配人教版第4章光现象第四章光现象第1节光的直线传播知能演练提升能力提升1.本身发光的物体叫作光源,下图中哪个物体不属于光源()2.下列关于光线的说法错误的是()A.光线表示出了光的传播方向B.光线是根据光的直线传播性质规定的C.光线是真实存在的D.实际上光线并不存在3.小明在学习“光的传播”时,看到老师的一个演示实验,过程如下:①用激光笔射向水中,观察到光线是一条直线(如图所示);②在A点处用漏斗向水中慢慢注入海波溶液,观察到光线发生了弯曲;③经搅拌后,观察到光线又变直。
小明根据上述现象得出的结论是()A.光的传播需要介质B.光只有在水中才沿直线传播C.光在海波溶液里不能沿直线传播D.光在同一种均匀介质中才沿直线传播4.光在不同的透明物质中传播的速度是不相同的,下列介质中光速大小排列顺序正确的是()A.v空气>v真空>v水>v玻璃B.v玻璃<v空气<v水<v真空C.v真空>v空气>v玻璃>v水D.v玻璃<v水<v空气<v真空5.已知光的传播速度约为3×108 m/s,从地球向月球发出一束激光信号,经过约2.54 s收到了从月球反射回来的信号,则月球到地球的距离约()A.3.81×108 mB.7.62×108 mC.2.6×108 mD.8×108 m6.运动会上,终点计时员应根据什么现象开始计时()A.听到枪声和看到白烟都可以B.看到白烟开始计时,因为烟雾看得清楚C.听到枪声开始计时,因为枪声听得清楚D.看到白烟开始计时,因为光速比声速大得多7.小明同学在课外用易拉罐做成如图所示的装置做小孔成像实验,如果易拉罐底部有一个很小的三角形小孔,则他在半透明纸上看到的像是()A.蜡烛的正立像B.蜡烛的倒立像C.三角形光斑D.圆形光斑8.晚上,人路过一盏路灯的过程中,其影子长度的变化情况是()A.先变短后变长B.先变长后变短C.逐渐变长D.逐渐变短9.(2020·湖南娄底中考)2020年6月21日下午3点半左右,娄底市内绝大部分同学亲眼看到了日环食这一难得的景象。
优化设计语文答案(精品).doc

优化设计语文答案语文优化设计参考答案发布时间:2012年03月16日黄河颂1.下列加点字的注咅全正确的一项是()。
A.哽育(pti) 澎W(pai) 气険(P6)B.山® (dian) 狂ft (Ian) 理障(ping)C.浩蓼(shGng)巡流(zhud)灌长(zi)D.饋歌(zan)发遊(yuan)宛转(wan)解析:A项,“哺”应读“bti”《项,“荡”应读“ddng” ;“滋”应读“zi”少项,“宛”应读“wdn”。
答案:B2.下列两组句子中加点词语的意思是否一样?并说明理由。
⑴A.用你那罢準的体魄。
B.多少男薙的故事,在你的身边扮演!(2)A.筑成我们尽殊的屏障。
B.我们尽欢的伟大精神。
答案:(1)不•样。
A句中的“英雄”是形容词,意思是“具有英雄品质的” ;B句中的“英雄”是名词,意思是''不怕困难、不顾自己、英勇斗争、令人钦佩的人”。
(2)-样。
都是名词,意思是“历史上形成的、处于不同社会发展阶段的各种人的共同体”。
3.下面的朗读节奏划分不正确的一项是()。
A.我/站在/高山之巅,望/黄河滚滚B.五千年的/古国文化,从你这儿/发源C.它/表现出/我们民族的精神D.向/南北两岸/伸出/千万/条铁的臂膀解析:D项的朗读节奏应为:伸出/千万条/铁的臂膀,或:伸出/千万条铁的臂膀。
答案:D4.诗歌讲究押韵,本诗在押韵上,隔二二句押韵,形成了自然的和谐韵律。
下面这段文字押韵的韵脚字有:__________ ,韵脚是___________ 。
我站在高山Z巅,/望黄河滚滚,/奔向东南。
/惊涛澎湃,/掀起万丈托澜;/浊流宛转,/结成九曲连环;/ 从昆仑山下/奔向黄海Z边;/把屮原大地/劈成南北两面。
答案:巅、南、澜、转、坏、边、面an5.下列对《黄河颂》的理解有误的一项是()。
A.这是一首赞美中华母亲河的颂歌,诗人借黄河歌颂了中华民族自强不息的伟大精神B.“望黄河滚滚”的“望”字,一直统领到“用你那英雄的体魄/筑成我们民族的屏障”。
2024-2025学年初中同步测控优化设计物理八年级下册配人教版第十章测评(A)含答案

2024-2025学年初中同步测控优化设计物理八年级下册配人教版第十章测评(A)含答案第十章测评(A)(时间:45分钟满分:100分)一、选择题(本大题共8小题,每小题4分,共32分)1.如图所示,在一只不计重力和厚度的塑料袋中装入大半袋水,用弹簧测力计钩住并将其慢慢浸入水中,直至塑料袋中的水面与容器中的水面相平。
此过程中弹簧测力计的示数()A.逐渐减小到零B.先减小后增大C.始终保持不变D.逐渐增大2.如图所示,某同学将一漂浮在水面上不开口的饮料罐缓慢地匀速按入水中,当饮料罐全部浸入水中后,继续向下压一段距离,共用时t0,此过程中饮料罐所受的浮力随时间变化的图像可能是下列图中的()3.两个相同的烧杯中分别装满了两种不同的液体,把甲、乙两球分别轻轻放入两杯液体中,最后处于如图所示状态。
甲、乙排开液体的重力相等,甲、乙所受浮力相比()A.甲所受浮力更大B.乙所受浮力更大C.甲、乙所受浮力一样大D.不知道液体密度,无法比较浮力大小4.将浸没在水中的鸡蛋释放,鸡蛋下沉,下列说法正确的是()A.鸡蛋受到的浮力方向始终竖直向上B.在水中越深,鸡蛋受到的浮力越大C.下沉的鸡蛋不受浮力作用D.鸡蛋受到的浮力大于重力5.长江上,一艘满载货物的轮船在卸完一半货物后,该艘轮船()A.会浮起一些,所受浮力变小B.会浮起一些,所受浮力变大C.会下沉一些,所受浮力变大D.会始终漂浮,所受浮力不变6.有一种救生艇满载时排开水的体积是2.4 m3,艇的自重为1×104 N,为保证安全,该救生艇最多承载的人数大约是(g取10 N/kg)()A.20B.30C.40D.507.全球变暖已经日益威胁到生物的生存,右图为北极熊母子无助地坐在一块不断消融缩小的浮冰上。
若浮冰和北极熊始终处于漂浮状态,则随着浮冰的消融()A.浮冰受到的浮力在增大B.浮冰受到的浮力大小不变C.浮冰在水中的体积在减小D.北极熊受到的支持力在减小8.如图甲所示,弹簧测力计下挂一长方物体,将物体从盛有适量水的烧杯上方离水面某一高度处缓缓下降,然后将其逐渐浸入水中。
08级《优化设计》卷B答案
解: (1)第一次迭代沿负梯度方向搜索:
4x − 2 0 −2 ( 0) 2 X ( 0 ) = , ∇f X ( 0 ) = 1 = −2 , S = 2 2 x2 − 2 X (0) 0 2 2α (1) ( 0) ( 0) 0 则 X = X +αS = +α = 0 2 2α 代入 f ( X ) ,得到 φ (α ) ,对其求导且令: φ ′(α ) = 0 1 解得: α = 3 4x − 2 2/3 (1) 2 / 3 (1) 则: X = = 1 = −2 / 3 , ∇f X 2 / 3 2 x2 − 2 X (1)
标准答案
河 南 科 技 大 学
试 卷 ︵ B ︶
二、 k-t 条件判断 X 用 (本题 20 分)
(1)
= [1, 1]T 是否为以下约束优化问题的最优解。
------------------------------密-----------------------------封-------------------------- -线------------------------
x3 = x0 + h = 0.3 + 1.4 = 1.7 , f 3 = f ( x3 ) = 2.69
∵ f 2 > f 3 ∴ 应继续加大步长向前探索 (3)取 h = 4h = 2.8 ,且交换变量 令 x1 = x2 = 1 , f1 = f ( x1 ) = 5 ,
姓
x2 = x3 = 1.7 , f 2 = f ( x2 ) = 2.69
专业、班级
x 2 = x3 = 3.1,
初三数学优化设计试卷答案

1. 已知函数f(x) = 2x - 1,则f(3)的值为()A. 5B. 6C. 7D. 8答案:C解析:将x=3代入函数f(x) = 2x - 1中,得f(3) = 2×3 - 1 = 6 - 1 = 5。
2. 若|a| = 5,则a的取值范围是()A. a > 0B. a < 0C. a = 5D. -5 ≤ a ≤ 5答案:D解析:绝对值表示一个数到0的距离,所以|a| = 5意味着a到0的距离是5,即a可以是5或者-5,所以取值范围是-5 ≤ a ≤ 5。
3. 下列各数中,有理数是()A. √2B. πC. 3/2D. √-1答案:C解析:有理数是可以表示为两个整数之比的数,所以3/2是有理数。
而√2、π和√-1都是无理数。
4. 若a、b、c是等差数列,且a+b+c=15,则b的值为()A. 5B. 7C. 8D. 10答案:A解析:等差数列中,任意两项之和等于它们中间项的两倍,即a+b = 2b,所以a+b+c = 3b,由题意知3b=15,解得b=5。
5. 下列方程中,无解的是()A. 2x + 3 = 7B. 3x - 4 = 5C. 5x + 2 = 0D. 2x + 3 = 0答案:D解析:对于方程2x + 3 = 0,移项得2x = -3,解得x = -3/2,所以方程有解。
其他方程均可以找到x的值。
6. 若m^2 - 4m + 3 = 0,则m的值为______。
答案:1 或 3解析:这是一个一元二次方程,可以通过因式分解或者使用求根公式求解。
因式分解得(m-1)(m-3) = 0,所以m的值为1或3。
7. 已知等差数列{an}的第一项为a1,公差为d,第n项an = 5,则a3的值为______。
答案:a3 = 5 - 2d解析:等差数列的通项公式为an = a1 + (n-1)d,代入an = 5,得a1 + (n-1)d= 5,解得a1 = 5 - (n-1)d。
七年级语文(下册)三维优化设计ABC同步测试卷与答案汇编(4个单元)
与义务教育课程标准实验教科书同步七年级语文(下册)三维优化设计ABC同步测试卷(1)(测试时间:120分钟测试总分:120分)班级:____________ 姓名:______________ 分数:___________第一单元篇名:《从百草园到三味书屋》《爸爸的花儿落了》《丑小鸭》诗两首:《假如生活欺骗了你》《未选择的路》《伤仲永》【基础知识训练】(20分)1.下列加点字的注音其中只有两个错误的一项是()(2分)A、确凿.(zuò)秕谷..(bǐ)蝉蜕.(tuì)木屐.(jī)B、拗.口(ǎo)掸.子(dān)嫉.妒(jí)环谒(yè)C.、讪..笑(shàn)迸.发(bìng)盔.甲(huī)叮嘱.(zhú)D、花圃.(pǔ)星宿.(xiù)脑髓.(suǐ)伫.立(zhù)2.给下列加点字选择正确的解释。
(2分)①宿.儒()A、长久的B、量词C、某些星的集合体②人迹罕.至()A、罕见B、稀少C、珍贵③骇.人听闻()A、害怕B、震惊C、恐惧④荒草萋萋()A、凄凉B、衰败C、茂盛3.在下边的空格处填上恰当的量词:(3分)出门向东,不上半里,走过一()石桥,便是我的先生的家了。
从一()黑油的竹门进去,第三间是书房。
中间挂着一()匾道:三味书屋;匾下面是一()画,画着一()很肥大的梅花鹿伏在古树下。
4.将《从百草园到三味书屋》一文的有关内容连线:(3分)A.从文体上说 a.状物、叙事、写人B.从思路上说 b.是散文C.从写法上说 c.是回忆童年生活5.下列句子中“其”字的用法与其他三项不同的一项是()(2分)A、其诗以养父母B、父利其然C、则其受于人者不至也D、彼其受之天也6.《未选择的路》中“路”包含了什么深刻的含义,你从中悟出什么人生的哲理。
(2分)_____________________________________________________________________________7《爸爸的花儿落了》一文中的“我”是一个小学刚毕业的孩子,同学们也已经小学毕业了,你觉得自己长大了吗?请结合具体的事实谈谈自己的感受。
优化设计复习资料有答案
现代设计方法参考书目:1、陈继平. 现代设计方法,华中科技大学出版社。
2、高健. 机械设计优化基础,科学出版社,2007,93、刘惟信. 机械最优化设计,第二版,清华大学出版社。
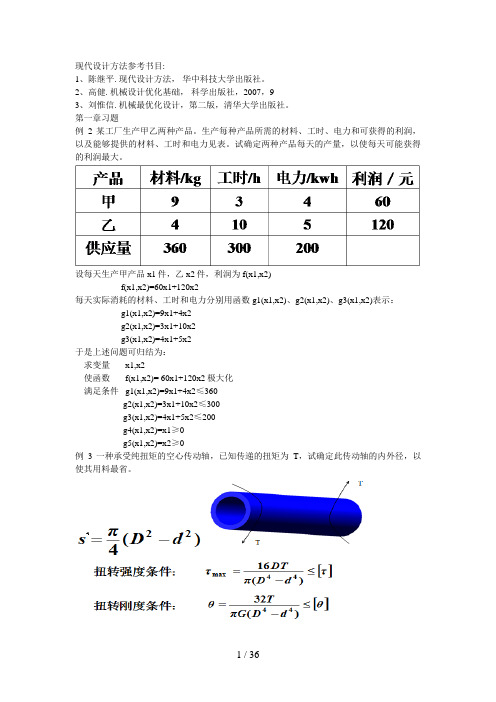
第一章习题例2 某工厂生产甲乙两种产品。
生产每种产品所需的材料、工时、电力和可获得的利润,以及能够提供的材料、工时和电力见表。
试确定两种产品每天的产量,以使每天可能获得的利润最大。
设每天生产甲产品x1件,乙x2件,利润为f(x1,x2)f(x1,x2)=60x1+120x2每天实际消耗的材料、工时和电力分别用函数g1(x1,x2)、g2(x1,x2)、g3(x1,x2)表示:g1(x1,x2)=9x1+4x2g2(x1,x2)=3x1+10x2g3(x1,x2)=4x1+5x2于是上述问题可归结为:求变量 x1,x2使函数 f(x1,x2)= 60x1+120x2极大化满足条件 g1(x1,x2)=9x1+4x2≤360g2(x1,x2)=3x1+10x2≤300g3(x1,x2)=4x1+5x2≤200g4(x1,x2)=x1≥0g5(x1,x2)=x2≥0例3 一种承受纯扭矩的空心传动轴,已知传递的扭矩为T,试确定此传动轴的内外径,以使其用料最省。
例: 求下列非线性规划优化问题优化设计的迭代算法1、下降迭代算法的基本格式 迭代公式基本原理:从某一初始设计开始,沿某个搜索方向以适当步长得到新的可行的设计,如此反复迭代,直到满足设计要求,迭代终止。
k k k SX X k1S(k)——第k步的搜索方向,是一个向量; αk ——第k 步的步长因子,是一个数,它决定在方向S(k)上所取的步长大小。
简单的说:是一个搜索、迭代、逼近的过程。
最关键的是搜索的方向和步长。
迭代算法的基本步骤:1,选定初始点X(0),令k=0;2、在X(k)处选定下降方向S(k);,3、从X(k)出发沿S(k)一维搜索,找到X(k+1)=X(k)+αkS(k), 使得f(X(k+1))<f(X(k)); 令k=k+1,转(2)。
九年级物理优化设计答案全册

4.(1)该表是一只电压表(2)该表有一个负接线柱和两个正接线柱
(3)该表有0~3V和0~15V两个量程(4)该表此时的示数可能为2V,
也可能是10V 5.0~15V 5V 0.5V 9V 0~3V 1V 0.1V 1.8V
智能演练:1~7:BDBDD DC 8.(1)3×103 3×10-3
(2)1.5×10-2 1.5×10-5 (3)104 107 9.接线时开关要断开,应选
2.B 3.B 4.排气 做功 吸气 压缩 丙、丁、乙、甲 内 机械
机械 内 5.喷油嘴
智能演练:
1~5:DADBD 6.内 机械 环保 7.增大 升高 8.化学 内 做功
9.做功 惯性
10. 酒精燃烧
坚固汽缸
高温高压水蒸气
活塞运动做功
玻璃管
燃料燃烧
木塞冲出
高温高压燃气
2021/5/27
4
《优化设计》14.2 热机的效率 快乐预习:
优化设计 13.1 分子热运动
快乐预习 一、分子 原子 二、1.相互作用 进入对方 2.固体 液体 气体
3.不停地做无规则运动 三、1. 无规则运动 2.温度 温度 四、1.引力和斥力 2.(1)斥力 (2)引力 (3)十分微弱 忽略 轻松尝试 1.D 2. D 3.C 4. 分子无规则运动 分子的无规则运动快慢 与温度有关,温度越低,分子的无规则运动越慢 5.甲 一切物质的分子都在不停地做无规则运动 6. D 7. 斥力 智能演练 1~5:DAC AD 6. 引 斥 引 斥 7. 扩散 剧烈 8. 不属于 减 少汽车尾气排放(答案只要合理即可) 9. 气球里的气体分子可以通过气球分子间的空隙跑出去,所 以过一两天气球就瘪了。这个事实能说明分子是很小的,并 且分子间有间隙。 12002.1B/5/27A瓶颜色由物色变为红棕色 永不停息地做无规则运动 1
大学优化设计试卷练习及答案 (1)
相对应的。
6
1.2.1 设计变量
设计变量 维数 设计空间
X x1 x2 T
2
R2
X x1 x2 x3 T
3
R3
X mn z1 b T
4
R4
目标函数 minF X x1x2 2 x1x3 x2 x3
设计变量
X x1 x2 x3 T D R3
D : g1 X x1 3 0
x1 x2
4
1.2.1 设计变量
设计方案由一组设计参数表示,
如一对斜齿轮:(mn, z1, b, )
设计常量 设计参数
设计变量
独立变量 非独立变量
连续变量 离散变量
如一对齿轮传动: z2=iz1 YFa ∝ z(zv)
设计变量:在设计过程中进行选择并需最终加以确定的独立变量
如一对齿轮传动:(mn, z1, b, )
(1)
(0)
x(k)
S (k )
x ( k 1)
x* o
x1
18
作业题
❖ (P17) 题2、题3、题4
4. 已知某约束优化问题的数学模型为
min F ( X ) ( x1 3)2 ( x2 4)2
X x1 x2 T D R2
D : g1( X ) 5 x1 x2 0 g2 ( X ) x1 x2 2.5 0 g3( X ) x1 0 g4(X ) x2 0
3
1.2 优化设计的数学模型
❖ [引例]用薄钢板制造一体积为5 m3的无盖货箱,要求长度不小于3m,宽 度不大于2m。欲使耗板材最少,问应如何选取货箱的长x1、宽x2、高x3。 试建立优化数学模型。
分析: 表面积 F X F x1, x2, x3 x1x2 2 x1x3 x2 x3 min
优化设计化学正文答案(详)
第一单元化学计量在实验中的应用第1节物质的量气体摩尔体积核心考点·分层突破考点一物质的量及阿伏加德罗常数落实基础1.6.02×1023相对原子(分子)质量易错辨析答案:(1)×(2)×(3)×(4)×(5)√考点突破【例1】答案:× × × ×√√ ×解析:A、B、C选项中,盐酸、CCl4、己烷在标准状况下均不是气体,错误;D选项,不是标准状况下,错误;E、F选项,由质量求气体的物质的量,与物质的状态无关,正确;G选项,标准状况下5.6 L NO和5.6 L O2组成的混合气体中所含原子总数为N A,错误。
【例2】答案:√√√√ ×解析:1 mol的NO2和1 mol的CO2中均含2 mol氧原子,A正确;乙烯与环丁烷的最简式均为CH2,含有n(CH2)=28g14g·mol-1=2 mol,B正确;与B选项类似,C选项中n(NO2)=92g46g·mol-1=2 mol,正确;D选项,N2与CO的摩尔质量均为28 g·mol-1,均为双原子分子,正确;E选项,均为氧单质,所含氧原子均为3 mol,错误。
【例3】答案:× ×√ × × × × × ×解析:A选项不是标准状况下,错误;Na在空气中完全反应生成Na2O、Na2O2,Na在上述两个反应过程中化合价均升高1,所以1 mol Na参加反应转移1 mol电子,B选项错误、C选项正确;D项,标准状况下,6.72 L NO2物质的量为0.3 mol,与水反应转移电子数应为0.2N A;E、F选项,Fe2+、Cl2少,应该用Fe2+、Cl2计算,分别转移1 mol、2 mol电子,错误;G选项,由氯气与水或碱反应可知错误;H选项,I-的还原性强于Fe2+,所以转移电子的物质的量大于1 mol,错误;I选项,转移的电子数为5N A,错误。
优化设计试卷C答案
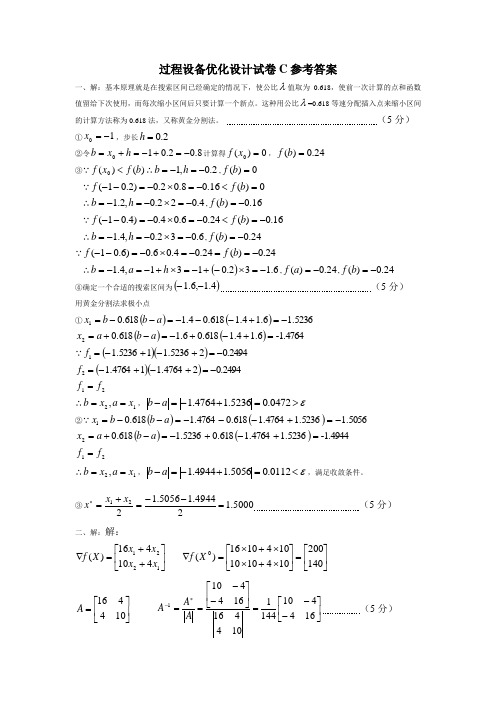
过程设备优化设计试卷C 参考答案一、解:基本原理就是在搜索区间已经确定的情况下,使公比λ值取为0.618,使前一次计算的点和函数值留给下次使用,而每次缩小区间后只要计算一个新点。
这种用公比λ=0.618等速分配插入点来缩小区间的计算方法称为0.618法,又称黄金分割法。
(5分)①10-=x ,步长2.0=h②令8.02.010-=+-=+=h x b 计算得0)(0=x f ,24.0)(=b f ③∵)()(0b f x f <∴2.0,1-=-=h b ,0)(=b f∵0)(16.08.02.0)2.01(=<-=⨯-=--b f f ∴4.022.0,2.1-=⨯-=-=h b ,16.0)(-=b f ∵16.0)(24.06.04.0)4.01(-=<-=⨯-=--b f f∴6.032.0,4.1-=⨯-=-=h b ,24.0)(-=b f ∵24.0)(24.04.06.0)6.01(-==-=⨯-=--b f f∴()6.132.0131,4.1-=⨯-+-=⨯+-=-=h a b,24.0)(-=a f ,24.0)(-=b f④确定一个合适的搜索区间为()4.1,6.1-- (5分)用黄金分割法求极小点 ①()()5236.16.14.1618.04.1618.01-=+---=--=a b b x()()-1.47646.14.1618.06.1618.02=+-+-=-+=a b a x ∵()()0.249425236.115236.11-=+-+-=f()()0.249424764.114764.12-=+-+-=f 21f f =∴12,x a x b==,ε>=+-=-0472.05236.14764.1a b②∵()()5056.15236.14764.1618.04764.1618.01-=+---=--=a b b x ()()-1.49445236.14764.1618.05236.1618.02=+-+-=-+=a b a x 21f f =∴12,x a x b==,ε<=+-=-0112.05056.14944.1a b ,满足收敛条件。
优化设计高考英语二轮复习 综合训练题三 含答案
综合能力训练三(满分:150分时间:120分钟)第Ⅰ卷(共100分)第一部分听力(共两节,满分30分)第一节(共5小题;每小题1.5分,满分7.5分)听下面5段对话。
每段对话后有一个小题,从题中所给的A、B、C 三个选项中选出最佳选项,并标在试卷的相应位置。
听完每段对话后,你都有10秒钟的时间来回答有关小题和阅读下一小题。
每段对话仅读一遍。
例:How much is the shirt?A.£19.15.B.£9.15.C.£9.18.答案:B1.Why does the woman turn down the man’s offer?A.She has been to the market.B.She doesn’t like vegetables.C.She wants to go to the market herself.2.What can we learn from the conversation?A.The snowstorm is getting weaker.B.There may be a big snowstorm in the speakers’ hometown.C.The woman has cancelled her trip to Iowa.3.What does the man advise the woman to do?A.Put ice on her hand.B.See a doctor right now.C.Avoid using her hand for a while.4.What will the woman do first?A.Paint the walls.B.Clean the floor.C.Clean the window.5.What size T-shirt does the woman decide to take?A.38B.40C.42第二节(共15小题;每小题1.5分,满分22.5分)听下面5段对话或独白。
2024-2025学年初中同步测控优化设计物理八年级下册配人教版第十二章测评(A)含答案

2024-2025学年初中同步测控优化设计物理八年级下册配人教版第十二章测评(A)含答案第十二章测评(A)(时间:45分钟满分:100分)一、选择题(本大题共8小题,每小题4分,共32分)1.“给我一个支点和一根足够长的棍,我就能撬起整个地球。
”下列生产和生活中的杠杆与阿基米德设想的杠杆属于同一类型的是()2.衣服夹是一种常用物品,如图所示给出了用手捏开和夹住物品时的两种情况。
下列说法正确的是()A.当用手将其捏开时,它是费力杠杆B.当用其夹住物品时,它是费力杠杆C.无论用手将其捏开还是夹住物品时,它都是费力杠杆D.无论用手将其捏开还是夹住物品时,它都是省力杠杆3.右图是小龙探究杠杆平衡条件的实验装置,用弹簧测力计在C处竖直向上拉,杠杆保持平衡。
若弹簧测力计逐渐向右倾斜,仍然使杠杆保持平衡,拉力F的变化情况是()A.变小B.变大C.不变D.无法确定4.如图所示,杠杆AOB用细线悬挂起来,分别在A、B两端挂上质量为m1、m2的重物时,杠杆平衡,此时AO恰好处于水平位置,AO=BO,不计杠杆重力,则m1、m2的关系为()A.m1>m2B.m1<m2C.m1=m2D.无法判断5.对图中所示的几种简单机械,下列说法正确的是()A.图甲所示的装置中OB是动力臂B.使用图乙所示的装置可省一半力C.图丙所示的装置是一种等臂杠杆D.图丁所示的汽车驾驶盘也是一种简单机械6.分别使用定滑轮、动滑轮、两个定滑轮和两个动滑轮组成的滑轮组,匀速提升同一物体到同一高度处,其机械效率分别为η定、η动、η组(不计绳重和摩擦,设每个滑轮质量相等),则下列选项中正确的是()A.η组<η动<η定B.η动<η定<η组C.η定<η动<η组D.η定<η组<η动7.如图所示,斜面长3 m,高0.6 m,建筑工人用绳子在6 s内将重500 N的物体从其底端沿斜面向上匀速拉到顶端,拉力是150 N(忽略绳子的重力)。
2024-2025学年初中同步测控优化设计物理九年级全一册配人教版专项训练含答案

2024-2025学年初中同步测控优化设计物理九年级全一册配人教版专项训练专项训练一热量的综合计算1.小丽为了测试汽车发动机的效率,开车以60 km/h的平均速度行驶了120 km,用去汽油25 L,已知汽油的密度为0.7×103 kg/m3,热值为4.6×107 J/kg,发动机的功率为32.2 kW,则该汽车发动机的效率为()A.23.6%B.28.8%C.36.5%D.38%2.(2020·贵州铜仁中考)质量为1.4 kg的干木柴完全燃烧,所放出的热量为J,如果这些热量的50%被质量为50 kg的水吸收,则水的温度将升高℃。
[干木柴的热值为1.2×107 J/kg,水的比热容为4.2×103 J/(kg·℃)]3.将焚烧生活垃圾放出的热量用来发电,是综合利用垃圾的一种方法。
据资料显示,目前,全国每年城市生活垃圾约有1.6×108 t。
焚烧1 t垃圾可放出1.5×1010 J热量,若我国每年的城市生活垃圾全部焚烧,则放出的热量是J,这相当于kg煤炭完全燃烧放出的热量(煤炭的热值为3.0×107 J/kg)。
4.(2020·内蒙古呼和浩特中考)某品牌太阳能热水器,水箱内有200 kg的水。
水的比热容为4.2×103J/(kg·℃)。
(1)在阳光照射下,水的温度升高了10 ℃,求水吸收的热量。
(2)天气原因,水箱内200 kg的水,温度从90 ℃降低到50 ℃,和温度从30 ℃升高到80 ℃,水放出的热量与吸收的热量之比是多少?5.天然气灶使用方便、经济环保,备受人们青睐。
小明用天然气灶将一壶质量为3 kg、温度为20 ℃的水加热至90 ℃,用时约10 min。
天然气的热值为3.5×107 J/m3,水的比热容为4.2×103 J/(kg·℃)。
(1)求该过程中水吸收的热量。
2024-2025学年初中同步测控优化设计物理八年级上册配人教版第6章 质量与密度含答案
2024-2025学年初中同步测控优化设计物理八年级上册配人教版第6章质量与密度第六章质量与密度第1节质量知能演练提升能力提升1.如图所示,质量为70 kg的运动员进行跳伞练习,在下落阶段,他的质量()A.等于0 kgB.略小于70 kgC.等于70 kgD.略大于70 kg2.用天平称出一个塑料瓶的质量,然后将其剪碎再放到天平上称,比较这个物体在形状变化前后的质量() A.变大 B.变小C.不变D.无法确定3.伦敦奥运会上几种球类运动的标志如图所示。
根据你平时的观察和了解,你认为质量约为2.7 g的球是()4.在“用托盘天平测物体质量”时,某同学用已调好的天平在测物体质量过程中,通过增、减砝码后,发现指针指在分度盘的中央刻度线左边一点,这时他应该()A.把横梁右端螺母向右旋出一些B.把横梁右端螺母向左旋进一些C.把天平右盘的砝码减少一些D.向右移动游码5.如图所示,“石头纸”是一种介于纸张和塑料之间的新型材料,具有手感薄、质量轻、可控性降解的特点。
若要测一张“石头纸”的质量,下列方法中相对比较简便且又正确的是()A.先测出100张纸的质量,再通过计算求得B.把一张纸放在一个盘子里,测出其质量,再减去盘子的质量C.把一张纸放在天平托盘里仔细称量D.把一张纸放在天平托盘里,反复称量,再求平均值6.为了测一瓶油的质量,某同学采用了如下步骤:(1)移动平衡螺母使横梁平衡;(2)瓶内倒入油后,称得油和瓶的总质量;(3)瓶放左盘,称得瓶的质量;(4)将天平整理好;(5)将天平置于水平台上;(6)将游码置于左端零刻度线处。
下列说法正确的是()A.不缺步骤,顺序为(5)(6)(1)(3)(2)(4)B.不缺步骤,顺序为(4)(5)(6)(1)(3)(2)C.缺步骤“(7)油的质量等于瓶和油的质量减去瓶的质量”,顺序为(4)(5)(6)(1)(3)(2)(7)D.缺步骤“(7)油的质量等于瓶和油的质量减去瓶的质量”,顺序为(5)(6)(1)(3)(2)(7)(4)7.在用天平称物体质量的实验中,下列操作和方案会造成测量结果一定偏小的是()A.调节横梁平衡时指针指在分度盘的左侧,就开始称量物体的质量B.使用生锈的砝码C.使用已经磨损的砝码D.先测量100粒米的总质量,再除以100求一粒米的质量★8.小明用天平测量矿石的质量,他先把天平放在台面上,再将游码调到“0”刻度线处,发现指针停在如图甲所示的位置,要使天平平衡,应将平衡螺母向调。
优化设计试卷试题练习(附答案)
罚因子的关系为 1(1,2,)k k r cr k -==⋅⋅⋅c 为惩罚因子的缩减系数,其为小于1的正数,通常取值范围在0.1~0.72)外点惩罚函数法简称外点法,这种方法新目标函数定义在可行域之外,序列迭代点从可行域之外逐渐逼近约束边界上的最优点。
外点法可以用来求解含不等式和等式约束的优化问题。
外点惩罚函数法的惩罚因子,它是由小到大,且趋近于∞的数列。
惩罚因子按下式递增1(1,2,)kk r cr k -==⋅⋅⋅,式中c 为惩罚因子的递增系数,通常取5~10c =2.共轭梯度法中,共轭方向和梯度之间的关系是怎样的?试画图说明。
. 对于二次函数,()12T T f X X GX b X c =++,从k X 点出发,沿G 的某一共轭方向kd 作一维搜索,到达1k X +点,则1k X +点处的搜索方向j d 应满足()()10Tj k k d g g +-=,即终点1k X +与始点k X 的梯度之差1k k g g +-与k d 的共轭方向j d 正交。
3.为什么说共轭梯度法实质上是对最速下降法进行的一种改进?.答:共轭梯度法是共轭方向法中的一种,在该方法中每一个共轭向量都依赖于迭代点处的负梯度构造出来的。
共轭梯度法的第一个搜索方向取负梯度方向,这是最速下降法。
其余各步的搜索方向是将负梯度偏转一个角度,也就是对负梯度进行修正。
所以共轭梯度法的实质是对最速下降法的一种改进。
4.写出故障树的基本符号及表示的因果关系。
略5.算法的收敛准则由哪些?试简单说明。
略6.优化设计的数学模型一般有哪几部分组成?简单说明。
略7.简述随机方向法的基本思路答:随机方向法的基本思路是在可行域内选择一个初始点,利用随机数的概率特性,产生若干个随机方向,并从中选择一个能使目标函数值下降最快的随机方向作为可行搜索方向。
从初始点出发,沿搜索方向以一定的步长进行搜索,得到新的X 值,新点应该满足一定的条件,至此完成第一次迭代。
优化设计试卷A答案
过程设备优化设计试卷A 参考答案一、(10分)(10分)二、解:构造内点罚函数 0)8ln(60410),(min 212121212221+→⋅⋅⋅>>⋅⋅⋅>>---+---+=k k k M M M x x M x x x x x x M x φ① 1M =1寻优)8ln(60410)(2121212221x x x x x x x x ---+---+=x φT )0,0(0=x T )842.2,842.4(11==*x xε>=-614.5011x x (7分)② 1.011.012=⨯==cM M寻优)8ln(1.060410)(2121212221x x x x x x x x --⨯-+---+=x φT )842.2,842.4(0=xT )983.2,983.4(22==*x x ε<=-2.012x x停止迭代,输出 T )983.2,983.4(=*x =*)(x f 17.1023 (8分) 内点罚函数要求初始点必须在可行域内,但求得的都是可行解,使设计方案有一定的储备能力,易于解决不等式约束问题;而外点罚函数不要求初始点的位置,但求得到的不是目标函数的可行点,易于解决等式约束问题。
(5分)三、解:(1)建立优化设计的数学模型 管道截面的周长为θsin 2hc s +=由管道截面面积为64516cot 2=+=θh ch A得到底边长度的关系式为θθcot 64516cot 645162h h h h c -=-= (5分)将它代入管道截面周长的关系式中,得到θθθθsin 2tan 64516sin 2cot 64516h h h h h h s +-=+-=(4分)因此,取与管道截面周长有关的独立参数h 和θ作为设计变量,即⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=θh x x X 21为使液体流速最大,取管道截面周长最小作为目标函数,即21211sin 2tan 64516)(min x x x x x X f +-=这是一个二维无约束非线性优化问题 (6分)四、(10分)起作用约束又称紧约束,即对于一个不等式约束来说,如果所讨论的设计点使该约束为零(或者该点当时正处在该约束的边界上)时;而其他不等式约束称为松弛约束。
小学优化设计试卷

小学优化设计试卷一、选择题(每题2分,共20分)1. 一个长方形的长是10厘米,宽是5厘米,它的周长是多少厘米?A. 20厘米B. 25厘米C. 30厘米D. 35厘米2. 一个数的5倍是50,这个数是多少?A. 10B. 15C. 20D. 253. 一个班级有45名学生,如果每5名学生一组,可以分成多少组?A. 8B. 9C. 10D. 114. 一辆汽车的速度是每小时60公里,它行驶了2小时,行驶了多少公里?A. 120公里B. 130公里C. 140公里D. 150公里5. 一个数加上10等于50,这个数是多少?A. 40B. 45C. 50D. 55二、填空题(每题2分,共20分)6. 一个数减去10得到20,这个数是_________。
7. 一个数的3倍是90,这个数是_________。
8. 一个长方形的长是8厘米,宽是4厘米,它的面积是_________平方厘米。
9. 一个班级有36名学生,每4名学生一组,可以分成_________组。
10. 一个数的一半是25,这个数是_________。
三、判断题(每题1分,共10分)11. 两个相邻的自然数的和一定是奇数。
()12. 一个数的平方总是大于这个数本身。
()13. 一个数的倒数是1/这个数。
()14. 一个数的平方根是这个数的一半。
()15. 一个数的立方等于这个数乘以它自己两次。
()四、简答题(每题5分,共30分)16. 请解释什么是质数,并给出三个小于20的质数的例子。
17. 请描述一下什么是公倍数,并给出两个数的公倍数的例子。
18. 请解释什么是因数,并给出一个数的因数的例子。
19. 请解释什么是分数,并给出一个分数的例子。
五、应用题(每题10分,共20分)20. 一个水果店有苹果和橙子两种水果,苹果每斤5元,橙子每斤4元。
小明买了3斤苹果和2斤橙子,他一共需要支付多少钱?21. 一个班级有30名学生,如果每5名学生组成一个小组,那么这个班级可以分成多少个小组?如果每个小组需要一个组长,那么需要多少名组长?六、附加题(每题10分,共10分)22. 一个长方形的长是15厘米,宽是10厘米,如果将这个长方形分成两个相等的部分,每个部分的面积是多少平方厘米?答案:1-5: B A B A A6-10: 30 30 32 9 5011-15: √ × √ × √16-19: 质数是指只能被1和它本身整除的大于1的自然数,例如2、3、5。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、填空题1.组成优化设计数学模型的三要素是 设计变量 、 目标函数 、 约束条件 。
2.函数()22121212,45f x x x x x x =+-+在024X ⎡⎤=⎢⎥⎣⎦点处的梯度为120-⎡⎤⎢⎥⎣⎦,海赛矩阵 为2442-⎡⎤⎢⎥-⎣⎦3.目标函数是一项设计所追求的指标的数学反映,因此对它最基本的要求是能用 来评价设计的优劣,,同时必须是设计变量的可计算函数 。
4.建立优化设计数学模型的基本原则是确切反映 工程实际问题,的基础上力求简洁 。
5.约束条件的尺度变换常称 规格化,这是为改善数学模型性态常用的一种方法。
6.随机方向法所用的步长一般按 加速步长 法来确定,此法是指依次迭代的步 长按一定的比例 递增的方法。
7.最速下降法以 负梯度 方向作为搜索方向,因此最速下降法又称为 梯度法,其收敛速度较 慢 。
8.二元函数在某点处取得极值的充分条件是()00f X ∇=必要条件是该点处的海赛矩阵正定9.拉格朗日乘子法的基本思想是通过增加变量将等式约束 优化问题变成 无 约束优化问题,这种方法又被称为 升维 法。
10改变复合形形状的搜索方法主要有反射,扩张,收缩,压缩11坐标轮换法的基本思想是把多变量 的优化问题转化为 单变量 的优化问题 12.在选择约束条件时应特别注意避免出现 相互矛盾的约束, ,另外应当尽量减少不必要的约束 。
13.目标函数是n 维变量的函数,它的函数图像只能在n+1, 空间中描述出来,为了在n 维空间中反映目标函数的变化情况,常采用 目标函数等值面 的方法。
14.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 和 计算最佳步长15协调曲线法是用来解决 设计目标互相矛盾 的多目标优化设计问题的。
16.机械优化设计的一般过程中, 建立优化设计数学模型 是首要和关键的一步,它是取得正确结果的前提。
二、名词解释 1.凸规划对于约束优化问题()min f X..s t ()0j g X ≤ (1,2,3,,)j m =⋅⋅⋅若()f X 、()j g X (1,2,3,,)j m =⋅⋅⋅都为凸函数,则称此问题为凸规划。
2.可行搜索方向是指当设计点沿该方向作微量移动时,目标函数值下降,且不会越出可行域。
3.设计空间:n 个设计变量为坐标所组成的实空间,它是所有设计方案的组合 4..可靠度 5.收敛性是指某种迭代程序产生的序列(){}0,1,k X k =⋅⋅⋅收敛于1lim k k X X +*→∞=6.非劣解:是指若有m 个目标()()1,2,i f X i m =⋅⋅⋅,当要求m-1个目标函数值不变坏时,找不到一个X ,使得另一个目标函数值()i f X 比()i f X *,则将此X *为非劣解。
7. 黄金分割法:是指将一线段分成两段的方法,使整段长与较长段的长度比值等于较长段与较短段长度的比值。
8.可行域:满足所有约束条件的设计点,它在设计空间中的活动范围称作可行域。
9.维修度 略 三、简答题1.什么是内点惩罚函数法?什么是外点惩罚函数法?他们适用的优化问题是什么?在构造惩罚函数时,内点惩罚函数法和外点惩罚函数法的惩罚因子的选取有何不同?1)内点惩罚函数法是将新目标函数定义于可行域内,序列迭代点在可行域内逐步逼近约束边界上的最优点。
内点法只能用来求解具有不等式约束的优化问题。
内点惩罚函数法的惩罚因子是由大到小,且趋近于0的数列。
相邻两次迭代的惩罚因子的关系为 1(1,2,)k k r cr k -==⋅⋅⋅c 为惩罚因子的缩减系数,其为小于1的正数,通常取值范围在0.1~0.72)外点惩罚函数法简称外点法,这种方法新目标函数定义在可行域之外,序列迭代点从可行域之外逐渐逼近约束边界上的最优点。
外点法可以用来求解含不等式和等式约束的优化问题。
外点惩罚函数法的惩罚因子,它是由小到大,且趋近于∞的数列。
惩罚因子按下式递增1(1,2,)k k r cr k -==⋅⋅⋅,式中c 为惩罚因子的递增系数,通常取5~10c =2.共轭梯度法中,共轭方向和梯度之间的关系是怎样的?试画图说明。
. 对于二次函数,()12T T f X X GX b X c =++,从k X 点出发,沿G 的某一共轭方向kd 作一维搜索,到达1k X +点,则1k X +点处的搜索方向j d 应满足()()10Tj k k d g g +-=,即终点1k X +与始点k X 的梯度之差1k k g g +-与k d 的共轭方向j d 正交。
3.为什么说共轭梯度法实质上是对最速下降法进行的一种改进?.答:共轭梯度法是共轭方向法中的一种,在该方法中每一个共轭向量都依赖于迭代点处的负梯度构造出来的。
共轭梯度法的第一个搜索方向取负梯度方向,这是最速下降法。
其余各步的搜索方向是将负梯度偏转一个角度,也就是对负梯度进行修正。
所以共轭梯度法的实质是对最速下降法的一种改进。
4.写出故障树的基本符号及表示的因果关系。
略5.算法的收敛准则由哪些?试简单说明。
略6.优化设计的数学模型一般有哪几部分组成?简单说明。
略7.简述随机方向法的基本思路答:随机方向法的基本思路是在可行域内选择一个初始点,利用随机数的概率特性,产生若干个随机方向,并从中选择一个能使目标函数值下降最快的随机方向作为可行搜索方向。
从初始点出发,沿搜索方向以一定的步长进行搜索,得到新的X 值,新点应该满足一定的条件,至此完成第一次迭代。
然后将起始点移至X ,重复以上过程,经过若干次迭代计算后,最终取得约束最优解。
三、计算题1.试用牛顿法求()221285f X x x =+的最优解,设()[]01010TX =。
初始点为()[]01010TX =,则初始点处的函数值和梯度分别为()()0120121700164200410140f X x x f X x x =+⎡⎤⎡⎤∇==⎢⎥⎢⎥+⎣⎦⎣⎦,沿梯度方向进行一维搜索,有()010000010200102001014010140X X f X αααα-⎡⎤⎡⎤⎡⎤=-∇=-=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦0α为一维搜索最佳步长,应满足极值必要条件()()[]()()()(){}()αϕααααααααm i n 14010514010200104200108min min 200020001=-⨯+-⨯-⨯+-⨯=∇-=X f X f X f()001060000596000ϕαα'=-=, 从而算出一维搜索最佳步长 0596000.05622641060000α==则第一次迭代设计点位置和函数值01010200 1.245283010140 2.1283019X αα--⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦ ()124.4528302f X =,从而完成第一次迭代。
按上面的过程依次进行下去,便可求得最优解。
2、试用黄金分割法求函数()20f ααα=+的极小点和极小值,设搜索区间[][],0.2,1a b =(迭代一次即可)解:显然此时,搜索区间[][],0.2,1a b =,首先插入两点12αα和,由式()1()10.61810.20.5056b b a αλ=--=--= ()2()0.20.6181.20.6944a b a αλ=+-=+⨯-=计算相应插入点的函数值()()4962.29,0626.4021==ααf f 。
因为()()12f f αα>。
所以消去区间[]1,a α,得到新的搜索区间[]1,b α, 即[][][]1,,0.5056,1b a b α==。
第一次迭代:插入点10.6944α=, 20.50560.618(10.5056)0.8111α=+-=相应插入点的函数值()()1229.4962,25.4690f f αα==,由于()()12f f αα>,故消去所以消去区间[]1,a α,得到新的搜索区间[]1,b α,则形成新的搜索区间[][][]1,6944.0,,1==b a b α。
至此完成第一次迭代,继续重复迭代过程,最终可得到极小点。
3.用牛顿法求目标函数()22121625f X x x =++5的极小点,设()[]022TX =。
解:由 ()[]022T X =,则()11022326450100f x x f X x f x ∂⎢⎥⎢⎥∂⎡⎤⎡⎤⎢⎥∇===⎢⎥⎢⎥∂⎢⎥⎣⎦⎣⎦⎢⎥∂⎣⎦()22211220222212320050ff x x x f X f f x x x ⎢⎥∂∂⎢⎥∂∂∂⎡⎤⎢⎥∇==⎢⎥⎢⎥∂∂⎣⎦⎢⎥∂∂∂⎣⎦,其逆矩阵为()12010321050f X -⎡⎤⎢⎥⎡⎤∇=⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦因此可得:()()11020010264032211000050X X f X f X -⎡⎤⎢⎥⎡⎤⎡⎤⎡⎤⎡⎤=-∇∇=-=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦()15f X =,从而经过一次迭代即求得极小点[]00TX *=,()5f X *=4.下表是用黄金分割法求目标函数 ()20f ααα=+的极小值的计算过程,请完成下表。