ABB标准功能块
ABB开关量功能块

说明 使能: 为 TRUE: 功能块在运行 输入信号 复位信号 功能块的状态, TRUE 表示正在 运行 输出信号 设置运行时间 低电平时间 延迟时间 访问延迟时间 量程 复位参数 访问复位参数 开关脉冲波前: 0=正,1=负 显示参数时间 显示参数运行时 间 消息
OUT TS TC 参数定义伪码 PTE LTE SKE PRE LRE SF PTL PTW MP
消息确认 D5.1 参数: 定时器,开关_ON 延迟 TON <图 D-16 页> TIME DELAY TIME 以时间格式(如 7#5M3S)输入延迟时间 ACCESS 可以改变延迟时间 操作人员不能改变延迟时间 SCALE END 显示的量程值,以时间格式输入 TRIGGER(触发) TRIGGERON+EDGE 上升沿触发 TRIGGERON +EDGE 下降沿触发 RESET] ACCESS 操作员可以复位定时器 操作员不能复位定时器 MESSAGE MESS.PRIORITY 输入消息优先级 0~5,无消息则输入”~”. HINT 输入暗示文本 MESS.TEXT 显示的消息文本,可直接输入或通过选择窗口输入 5.2 功能块数据: 定时器,开关-ON 延迟 TON 名称 数据类型 配置 访问 输入端 EN YES 布尔型 读写 IN RES 输出端 ENO 布尔型 布尔型 布尔型 NO NO NO 读写 读写 只读
开关量控制
D2 二进制输出,M-BOUT 〈图 D6〉功能: 用于安排一个二进制输出的设置,允许工作在手动方式或自动方式。在手动方式,输出 由操作员控制。在自动方式,输出由输入信号控制。如果手动方式和自动方式同时使用,则 手动优先。机器用一个 SMA 输出信号指示当前的工作方式为手动(逻辑 0 信号)还是自动 (逻辑 1 信 号 ) 。 显示: 名称,很短的文字说明,用 M 和 A 表示工作方式,另外还显示状态说明。该 功能有一个小面板。 操作说明:操作员可以用按钮 M 和 A 完成手动/自动以及自动/手动工作方式之间的相 互转换。在手动方式时,操作员可以用按钮 0/1 控制输出。 D2.1 参数:二进制输出 M-BOUT。 〈图 7〉 工作方式〈OPERATING MODE〉 MANUAL ●启动手动工作方式 AUTOMATCI ●启动自动工作方式 LOCK MANUAL �不允许转换到手动方式 �可以转换到手动方式 LOCK AUTOMAT �不允许转换到自动方式 � 可以转换到手动方式 显示文字〈DISPLAY TEXT FOR 〉 状态 1 显示二进制信号 1 的说明,该说明可以直接输入或通过选择窗口输入 状态 0 显示二进制信号 0 的说明,该说明可以直接输入或通过选择窗口输入 初始设置〈UITIAL SETTICGDS〉 手动工作方式启动时输出为: 〈MAUUAL VALUE OUT〉 设置为逻辑-1 设置为逻辑-0 手动值的可访问性能 在手动工作方式可以必变输出值 不允许操作员改变输出值 D2.2 功能块的数据:二进制输出 M-BOUT 名称 数据类型 访问 配置 说明 输入 EN YES ENABLE 布尔型 读写 1N NO 型布尔 读写 输入信号 MM NO 布尔型 读写 手动工作方式的 信号 MA NO 布尔型 读写 自动工作方式的 信号 NO 输出 布尔型 只读 ENO NO 布尔型 只读 过程状态 OUT NO 布尔型 只读 输出信号 SMA NO 布尔型 只读 工 作 方 式 .TRUE= 自 动.FALSE=手动 参数定义伪码
ABB CBF功能块之七
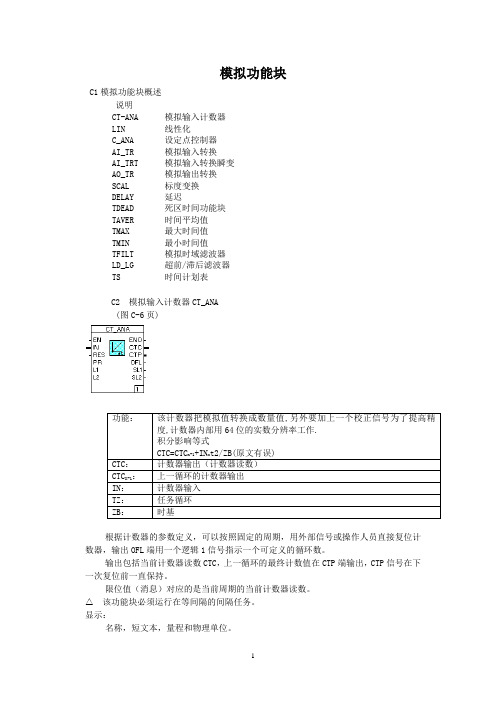
模拟功能块C1模拟功能块概述说明CT-ANA 模拟输入计数器LIN 线性化C_ANA 设定点控制器AI_TR 模拟输入转换AI_TRT 模拟输入转换瞬变AO_TR 模拟输出转换SCAL 标度变换DELAY 延迟TDEAD 死区时间功能块TAVER 时间平均值TMAX 最大时间值TMIN 最小时间值TFILT 模拟时域滤波器LD_LG 超前/滞后滤波器TS 时间计划表C2 模拟输入计数器CT_ANA(图C-6页)根据计数器的参数定义,可以按照固定的周期,用外部信号或操作人员直接复位计数器,输出OFL端用一个逻辑1信号指示一个可定义的循环数。
输出包括当前计数器读数CTC,上一循环的最终计数值在CTP端输出,CTP信号在下一次复位前一直保持。
限位值(消息)对应的是当前周期的当前计数器读数。
该功能块必须运行在等间隔的间隔任务。
显示:名称,短文本,量程和物理单位。
计数器当前读数CA(引脚CTC),上一周期计数器读数CP(引脚CTP)。
基值BV(引脚PR)显示为数字值。
当前计数器读数CTC和上一周期计数器读数CTP还显示为条状图。
限位值L1和L2显示为数字值,标识在相应的显示条中。
如果配置为可以复位,则显示复位按钮。
操作说明:可以改变基值BV(引脚PR)和限位值L1、L2(引脚L1、L2),可以配置计数器是否允许复位。
消息确认C2.1 参数:模拟输入计数器CT_ANA(图C-7页)Scale start: 零点,以实数形式输入Scale end: 量程,以实数形式输入Dimension: 物理单位,以文本形式输入或从列表中选择Reset counter by: (用什么复位计数器):Reseting value: 超过定义的最大允许值时复位如果输入为空白,复位值则无效.调试时显示值为0.0,该值不能改变Period duration: 经过一人固定周期时间复位,如T#2h(2小时复位一次).如果输入为空白,则周期无效,即永远运行。
ABB REM 543 545电动机和发电机保护终端 说明书

模拟量输出 如果 REM541 和 REM543 电机终端配置了前 述的 RTD/ 模拟量输入模块,该模块同时具有 4 个通用的 0...20mA 模拟电流输出。所有的 输出通道同电源和电机终端的机箱是隔离的, 且通道之间也是隔离的。模拟量输出可以用 作测量或计算信息传到盘表或 PLC 等。
LED 指示灯 电机终端具有 8 个 LED 指示灯,用继电器配置 工具软件可以对这些 LED 进行配置。可以任意 设定 LED 的颜色(绿、黄、红)、 所关联的信 号和常亮 / 常暗状态。并具有三种信号驱动模 式:信号不保持、信号保持常亮和信号保持闪 烁。报警信号可由远方、就地或者通过使用电 机终端的逻辑来复归。
设计(续)
REM 543/545 电动机和发电机保护终端
一些特定的开关量输入可以被配置为开关量输 入或脉冲计数输入口。当开关量输入口被配置 为脉冲计数器输入口工作时,输入的脉冲计数 频率范围为 0…100 Hz。
外部接点抖动和振荡过滤 电机终端有两个综合参数用于外部接点输入 抖动过滤。这些设定的参数用于检测所有开 关量是否发生了接点抖动或振荡。如果检测 到接点抖动或振荡,将作为事件记录。
● 具有三个通讯接口:一个用于与 PC 机的就 地通讯,另外两个通过远方通讯系统用于变 电站控制或监视。
● ABB 变电站自动化系统成员之一。
REM543 和 REM545 旋转电机终端被设计作 为小型和中型功率内燃机、水电厂和火力发电 厂里的发电机和发电机—变压器组单元的综合 主保护。还可用于水泵、鼓风机、碾磨机和粉 碎机等中压同步 / 异步电机的保护。REM 54_ 电机终端作为一个综合装置也能满足船用电机 保护单元紧凑性的需求。
显示面板 电机终端具有固定液晶屏,也可以选择外部的显 示液晶屏(注:与装置通过CAN 总线连接)。外 部的显示液晶屏模块需要独立的电源或者和装置 共用外部电源。液晶显示器共可以显示19行,分 成2个窗口:主窗口(17行),辅助窗口(2 行)。
ABB AC500系列PLC指令与功能块手册

技术资料ABB AC500系列PLC指令与功能块手册前言AC500是ABB公司推出的一款可升级的和灵活的自动化控制系统,可完美地满足客户需求。
此系统采用了底板上组合模块的结构, 包括多种CPU模块、通信接口模块、I/O模块及特殊功能模块等。
同时,ABB公司还推出了功能强大的PS501编程软件及丰富的指令系统。
AC500系列PLC可为不同工业领域的用户提供个性化的解决方案,适用于逻辑控制、顺序控制、过程控制和传动控制等领域。
我们已尽全力保证该文件的正确性和完整性。
但是,不可能有绝对没错的文件,因而欢迎您随时向我们提出宝贵的意见和建议。
如何使用本手册如果已经熟练掌握PS501编程软件,直接通过目录查找需要的指令。
如果刚刚开始学习PS501编程软件,建议阅读“第1章 AC500 PLC指令概述”。
如果对PLC所使用的操作数与数据类型不是很了解,建议阅读第2、3章。
附录包含指令速查表、IEC标准指令表、指令关联冲突速查表。
目录1.指令系统概述 (2)1.1 指令的定义与分类 (2)1.2 指令库的定义与分类 (9)1.2.1 基本指令库 (9)1.2.2 扩展指令库 (9)1.3指令库的添加 (9)1.4 指令系统使用注意事项 (9)2.操作数 (2)2.1常数 (2)2.1.1 BOOL常数 (9)2.1.2 TIME常数 (9)2.1.3 DATA常数 (9)2.1.4 TIME_OF_DAY常数 (9)2.1.5 DATE_AND_TIME常数 (9)2.1.6 数值常数 (9)2.1.7 REAL/LREAL常数 (9)2.1.8 STRING常数 (9)2.1.9类型符 (9)2.2 变量 (9)2.2.1 变量 (9)2.2.2 地址 (9)2.2.3 存取数组、结构和POU变量 (9)2.2.4 变量的位寻址 (9)2.2.5 功能 (9)3.数据类型 (2)3.1 标准数据类型 (2)3.1.1 布尔型数据类型 (2)3.1.2 整型数据类型 (2)3.1.3 实型数据类型REAL/LREAL (2)3.1.6 时间常数 (2)3.2 用户数据类型 (2)3.2.1 数组 (2)3.2.2 指针 (2)3.2.3 枚举(ENUM) (2)3.2.4 结构(STRUCT) (2)3.2.5 参考类型(别名) (2)3.2.6 子范围类型 (2)4.基本指令 (2)4.1 算术运算指令 (2)4.1.1 ADD—加法指令 (9)4.1.2 MUL—乘法指令 (9)4.1.3 SUB—减法指令 (9)4.1.4 DIV—除法指令 (9)4.1.5 MOD—取余指令 (9)4.2 赋值指令(MOVE) (2)4.3逻辑运算指令 (2)4.3.1 AND—与指令 (9)4.3.2 OR—或指令 (9)4.3.3 XOR—异或指令 (9)4.3.4 NOT—取非指令 (9)4.4移位指令 (2)4.4.1 SHL—左移指令 (9)4.4.2 SHR—右移指令 (9)4.4.3 ROL—循环左移指令 (9)4.4.4 ROR—循环右移指令 (9)4.5选择指令 (2)4.5.1 SEL—二选一指令 (9)4.5.2 MAX—取最大值指令 (9)4.5.5 MUX—多选一指令 (9)4.6比较指令 (2)4.6.1 GT—大于指令 (9)4.6.2 LT—小于指令 (9)4.6.3 GE—大于等于指令 (9)4.6.4 LE—小于等于指令 (9)4.6.5 EQ—等于指令 (9)4.6.6 NE—不等于指令 (9)4.7数据类型转换指令 (2)4.7.1 BOOL_TO_<TYPE>—布尔类型转换指令 (9)4.7.2 BYTE_TO_<TYPE>—字节类型转换指令 (9)4.7.3 WORD_TO_<TYPE>—字类型转换指令 (9)4.7.4 DWORD_TO_<TYPE>—双字类型转换指令 (9)4.7.5 SINT_TO_<TYPE>—单整型转换指令 (9)4.7.6 USINT_TO_<TYPE>—无符号单整型转换指令 (9)4.7.7 INT_TO_<TYPE>—整数类型转换指令 (9)4.7.8 UINT_TO_<TYPE>—无符号整数类型转换指令 (9)4.7.9 DINT_TO_<TYPE>—双整数类型转换指令 (9)4.7.10 UDINT_TO_<TYPE>—无符号双整数类型转换指令 (9)4.7.11 REAL_TO_<TYPE>—实数类型转换指令 (9)4.7.12 TIME_TO_<TYPE>—时间类型转换指令 (9)4.7.13 DATE_TO_<TYPE>—日期类型转换指令 (9)4.7.14 DT_TO_<TYPE>—日期时间类型转换指令 (9)4.7.15 TOD_TO_<TYPE>—时间类型转换指令 (9)4.7.16 STRING_TO_<TYPE>—字符类型转换指令 (9)4.7.17 TRUNC—截短转换指令 (9)4.8初等数学运算指令 (2)4.8.1 ABS—绝对值指令 (9)4.8.2 SQRT—平方根指令 (9)4.8.5 EXP—指数指令 (9)4.8.6 SIN—正弦指令 (9)4.8.7 COS—余弦指令 (9)4.8.8 TAN—正切指令 (9)4.8.9 ASIN—反正弦指令 (9)4.8.10 ACOS—反余弦指令 (9)4.8.11 ATAN—反正切指令 (9)4.8.12 EXPT—幂指令 (9)4.9地址运算指令 (2)4.9.1 ADR—取地址指令 (9)4.9.2 ^—取地址内容指令 (9)4.9.3 BITADR—位地址指令 (9)4.9.4 INDEXOF—索引指令 (9)4.9.5 SIZEOF—数据类型大小指令 (9)4.10调用指令(CAL) (2)4.11初始化操作指令(INI) (2)4.12 字符串处理指令(Standard.lib) (2)4.12.1 CONCAT—合并字符串指令 (9)4.12.2 DELETE—删除字符指令 (9)4.12.3 FIND—查找字符串指令 (9)4.12.4 INSERT—插入字符串指令 (9)4.12.5 LEFT—左边取字符串指令 (9)4.12.6 LEN—取字符串长度指令 (9)4.12.7 MID—中间取字符串指令 (9)4.12.8 REPLACE—替换字符串指令 (9)4.12.9 RIGHT—右边取字符串指令 (9)4.13 库版本信息检查指令(Util.lib) (2)4.14 BCD码转换指令(Util.lib) (2)4.14.1 BCD_TO_INT—BCD码转整型指令 (9)4.15.1 EXTRACT—位提取指令 (9)4.15.2 PACK—位整合指令 (9)4.15.3 PUTBIT—位赋值指令 (9)4.15.4 UNPACK—位拆分指令 (9)4.16 高等数学运算指令(Util.lib) (2)4.16.1 DERIVATIVE—微分 (9)4.16.2 INTEGRAL—积分 (9)4.16.3 STATISTICS_INT—整型统计 (9)4.16.4 STATISTICS_REAL—实型统计 (9)4.16.5 VARIANCE—平方偏差 (9)4.17 控制器指令(Util.lib) (2)4.17.1 PD—比例微分控制器 (9)4.17.2 PID—比例积分微分控制器 (9)4.17.3 PID_FIXCYCLE—比例积分微分控制器 (9)4.18 信号发生器指令(Util.lib) (2)4.18.1 BLINK—脉冲信号发生器 (9)4.18.2 GEN—典型周期信号发生器 (9)4.19 函数操纵器指令(Util.lib) (2)4.19.1 CHARCURVE—特征曲线 (9)4.19.2 RAMP_INT—整型限速 (9)4.19.3 RAMP_REAL—实型限速 (9)4.20 模拟量处理指令(Util.lib) (2)4.20.1 HYSTERESIS—滞后 (9)4.20.2 LIMITALARM—上下限报警 (9)4.21 双稳态指令(Standard.lib) (2)4.21.1 SR—置位优先双稳态器 (9)4.21.2 RS—复位优先双稳态器 (9)4.22 触发器指令(Standard.lib) (2)4.22.1 R_TRIG—上升沿检测触发器 (9)4.23.1 CTU—递增计数器 (9)4.23.2 CTD—递减计数器 (9)4.23.3 CTUD—递增递减计数器 (9)4.24 定时器(Standard.lib) (2)4.24.1 TP—普通定时器 (9)4.24.2 TON—通电延时定时器 (9)4.24.3 TOF—断电延时定时器 (9)4.24.4 RTC—实时时钟 (9)5.AC500扩展指令 (2)5.1 外部系统库 (2)5.1.1 BATT—读取电池状况 (9)5.1.2 CLOCK—显示及校正时钟 (9)5.1.3 CLOCK_DT—以“DT”格式显示及校正时钟 (9)5.2 内部系统库 (2)5.2.1 CPU_INFO—读取CPU类型 (9)5.2.2 DIAG_ACK—确认一个错误 (9)5.2.3 DIAG_ACK_ALL—确认一个错误类别的所有错误 (9)5.2.4 DIAG_EVENT—生成一个错误事件 (9)5.2.5 DIAG_GET—读取错误 (9)5.2.6 DIAG_INFO—显示对所有还未被读取的错误的观察 (9)5.2.7 FLASH_DEL—删除闪存中的一个数据段 (9)5.2.8 FLASH_READ—从闪存中读取一个数据段 (9)5.2.9 FLASH_WRITE—将一个数据段写到闪存中 (9)5.2.10 IO_DIAG—读取I/O总线的诊断数据 (9)5.2.11 IO_INFO—读取连到I/O总线的设备的数量 (9)5.2.12 IO_MODULE_DIAG—读取I/O总线的模块诊断数据 (9)5.2.13 IO_VERSION—读取I/O总线驱动的版本 (9)5.2.14 RTS_INFO—读取CPU实时系统的版本 (9)5.2.15 SD_READ—从SD卡读取一个数据段 (9)5.2.17 SLOT_INFO—读取插槽信息 (9)5.2.18 SYS_TIME—读取系统时间 (9)5.3 Modbus库 (2)5.3.1 COM_MOD_MAST—处理Modbus主机报文 (9)5.4 ASCII通信库 (2)5.4.1 COM_REC—通过一个“自由模式”的串行接口接收数据 (9)5.4.2 COM_SEND—通过一个“自由模式”的串行接口发送数据 (9)5.5 Ethernet库 (2)5.5.1 ETH_MOD_INFO—从OpenModbus中读取关于TCP/IP处理的状态信息 (9)5.5.2 ETH_MOD_MAST—在TCP/IP客户端(主机)报文上处理OpenModbus (9)5.5.3 ETH_OWN_IP—输出自已的IP地址 (9)5.5.4 ETH_UDP_INFO—从UDP/IP处理中读取状态信息 (9)5.5.5 ETH_UDP_REC—从UDP/IP接收缓存中读取一个数据包 (9)5.5.6 ETH_UDP_SEND—通过以太网UDP/IP发送一个数据包到一个工作站 (9)5.5.7 ETH_UDP_STO—从超时数据缓存读取以太网UDP/IP超时数据包 (9)5.5.8 IP_ADR_DWORD_TO_STRING—IP地址的格式转化 (9)5.5.9 IP_ADR_STRING_TO_DWORD—IP地址的格式转化 (9)5.6 PROFIBUS库 (2)5.6.1 DPM_CTRL—将全局控制指令发送到DP从机 (9)5.6.2 DPM_READ_INPUT—读取从机的输入数据,该从机没被指派给主机 (9)5.6.3 DPM_READ_OUTPUT—读取从机的输出数据,该从机没被指派给主机 (9)5.6.4 DPM_SET_PRM—将用户参数发送到DP从机 (9)5.6.5 DPM_SLV_DIAG—获得DP从机的详细诊断数据 (9)5.6.6 DPM_STAT—读出PROFIBUS通讯模块的状态 (9)5.6.7 DPM_SYS_DIAG—读出所有DP从机的状态概述 (9)5.6.8 DPV1_MSAC1_READ—从DPV1从机读取一个数据块 (9)5.6.9 DPV1_MSAC1_WRITE—将一个数据块写到DPV1从机 (9)6. 编程方式附录 (2)1A C500指令速查表 (2)第1章指令系统概述ABB公司AC500系列PLC为用户提供了丰富的指令,这些指令均可通过编程软件PS501进行调用,操作简单,使用方便。
ABBModbusMaster功能块

开始数据发送. 为输出 NDR 为逻辑 0 时,可以发送电传数据项 显示:无 MODM-R16C 〈图 K-13 页〉
Prio Hint 提示的定义。
输入优先级 1-5,无消息则输入“一”。 输入提示文本,见 B 部分,通用说明,功能块参数的
Message text 输入等待回答的最大时间,以毫秒为单位。 以数形式输入,范围 0-9999ms,输入 0 表示无超时。 Repeats 发生超时错误时或忽略电传回答时的最大重发次数, 输入范围 0-9。 Interface name Auto request 接口块 MODM-DEV 在硬件结构中的标鉴名。 � 自动请求,即 REQ 输入不能转换 � 该功能块不处理,即没有 REQ 输入。 � 无自动请求。即 REQ 输入启动传送。 Modbus function read Slave addr Coil status Input status Stat address Coils count 为8 输入以节点地址,范围为 0-247 modbus 功能 01 线圈状态的发送 modbus 功能 02 线圈状态的发送 输入变量块的起始地址 输入线圈变量在电传中的号码,MODM_R8C 最大
K4
读线圈,MODM-R8C,MODM-R16C
〈图 K-12 页〉 功能:读取开关值,用 MODM-R16C 代表两个功能块,因为其参数定义伪 码 是相同的. 该功能块通过 Freelance 2000 系统的串行接口读取外部系统 的布尔型 数据,使用 Modbus 协议功能 01/02.
功能 01
务中 执行而是在后台执行,如果已经接受了从节点的响应,在下次运行执 行任务 前读/写功能块不能输出该响应。主节点的读/写功能块产生的 任务可以以不同的方式通过自动请求检查框定义。 自动请求的操作方法: 无自动处理,出现在功能块中的输入请求 REQ 由用户 选择控制,REQ 输入引脚从 0 变到 1 时产生一个请求。 写功能块一直发送数据,即使没有改变。 � 自动处理: REQ 输入引脚不再出现在功能块中, 因为每次调用任 务时 REQ 输入设置为相反的状态。对所有其它任 务运行, 只有出现逻辑 1 时才读或写数据。 读一 写 据。 □ 脚 主节点读/写功能块表示,任务处理已完成的信号避孕药 NDR(新数 据就绪) , DSR(数据设置就绪) ,NDR 属于读功能块,DSR 属于写功能块。读/ 写功 能块可以串联起来,方法是 NDR 或 DSR 与下一个读/写功能块的输入 REQ 不处理 功能不产生任何请求, 功能块中同有 REQ 输入引 成功处理请求后尽快读数据 成功处理请求消息并且数据已改变后尽快写数
ABB标准功能块
类似字符数据类型从左到右基于相关为 ISO646 ,如果字符有不同的长度,那么最短的
一个被看作是随零填充的。
例如:”a”大于”A”,
“au”大于”AU”
显示
操作员介入 参数
无
无
无
I. 6 标准/双态开关功能块
I 6.1 双态开关,SEL
此功能有 3 个输入,上部的输入总是 BOOL 数据类型,使用它,依靠目前的信号接下来
所有的输入和输出信号是相同的数据类型 REAL,UDINT,DINT,INT,DT 或字符数据类型
STR8-STR256
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设定。
类似的字符数据类型从左到右是基于相关的 ISO646 号码的数字化数值。如果字符有不同
的长度,那么最短的一个被看作是随零填充的。
或移位到右(SHR)。任一空位都被 0 填充。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。结果被传送到
输出。
显示
操作员介入
参数
无
无
无
I3.2 左旋,右旋,ROL,ROR
(图见 I-8) 功能
这些功能通过一个位置从数据类型 DWORD,WORD 或 BYTE 的输入信号到左(ROL)或
逻辑异或,XOR
(图见 I-7) 功能
此功能完成一位一位地异或输入互联以及传送结果到输出。
数据类型 BOOL 和 DWORD 允许当作输入和输出。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。
最大输入为 10。
显示
操作员介入
参数
ABB程序功能块描述Functional Descr MOTFREQ01

We reserve all rights in this document and in the information contained therein. Reproduction, use or disclosure to third parties without express authority is strictly forbidden. ABBFUNCTIONAL DESCRIPTIONMOTFREQ011 Speed or Direction Variable Speed MotorFunctional Unit MOTFREQ01 Functional DescriptionContents1General (4)2Configuration (4)3Function Block MOTFREQ01 (5)4Function Description (8)4.1Basic Properties (8)4.2Motor Control Modes (8)4.2.1JOG (9)4.2.2LOCAL (9)4.2.3MANUAL (10)4.2.4EXTERNAL 1 and EXTERNAL 2 (10)4.2.5DISABLED (10)4.3Setpoint Modes (11)4.3.1LOCAL Setpoint (11)4.3.2MANUAL Setpoint (11)4.3.3EXTERNAL Setpoint (12)4.4Setpoint Speed (12)4.5Setpoint Tracking (12)4.6Ready for Start (12)4.7Ready (12)4.8Start-up (12)4.9Interlocks (13)4.10Motor Alarms (13)4.11Start and Stop (13)4.11.1Start and Stop Order at Different Motor Control Modes (14)4.11.2Start Order Selection (15)4.11.2.1Control mode JOG (15)4.11.2.2Control mode LOCAL (15)4.11.2.3Control mode MAN (15)4.11.2.4Control mode Ext1 or Ext2 (15)4.11.2.5Control mode DISABLE (15)4.12Fault Evaluation in the Control Circuit (15)4.13Supervision of Load Control (16)4.14Interaction Window (16)4.14.1MOTFREQ Interaction Window (16)4.14.2General Parameters (16)4.14.3Order & Order Event Block (17)4.14.4Indication Event Block (18)4.14.5Interlock Settings (19)4.14.6Current settings (20)4.14.7Texts (20)4.14.8Ranges & Settings (21)4.14.9Indications (21)5Operator Functions (22)5.1Presentation (22)5.1.1Display elements (22)5.1.1.1Object Display (23)5.1.1.2Process Display (23)5.1.2Time-logged Properties (24)5.2Faceplate (Dialog) (25)5.3Alarm and Event Handling (27)Functional Unit MOTFREQ01 Functional Description5.3.1General (27)5.3.2Alarm and Event Message (28)5.3.3Alarm and Event blocking (28)5.4Text Handling (29)Functional Unit MOTFREQ01 Functional Description1 GeneralMOTFREQ01 is a functional unit designed for the control of variable speed motors in different processes. It is based on the functionality of MOTCON and is designed primarily for use with AC frequency converters delivered by third-party vendors.The functional unit is standardised to a high degree to simplify the work of designing presentation, dialog and control logic. The unit has many optional capabilities, which increase its operational flexibility. MOTFREQ01 normally performs its control function without help from other elements.MOTFREQ01 is used in the control of variable speed motors from Operate ITOperator Station, control desks or control organs at the motor itself. The motor can be controlled from a master control function (e.g. group start, level regulation from level gauges etc).2 ConfigurationMOTFREQ01 like other functional units is built up of two parts: •A Function Block, which is handled in the same way as other Function Blocks in the ABB Controller 800M range of products. Figure 3.1 illustrates the terminals on the function block.•A section for operator functions, which consists of presentation and orderfunctions. Data and parameters from the process are presented on an Operate ITOperator Station. The keyboard of the Operate ITOperator Station is used by the operator to enter commands which control the operation of the functional unit. The response to the operator's intervention is shown on the display screen of theOperate ITOperator Station. The application work for this part is normally limited to the arrangement of the display. Figure 2.1 shows the structure of the functional unit.PROCESS OBJECTFigure 2-1. The Structure of the Functional UnitFunctional Unit MOTFREQ01 Functional Description3 Function Block MOTFREQ01The Function Block MOTFREQ01 implemented in the AC800M controller is illustratedbelow in figure 3-1. A more detailed description of each terminal is shown in table3-1.FUNCTION OF INPUT TERMINALS MOTFREQ01 FUNCTION OF OUTPUT TERMINALSName Name NoInt No Interlock IndicationDescription Description Trip Trip IndicationControl Program Enable Enable Blk Control not Enabled Indication Control Circuit Supervision ME RFS Ready For Start IndicationControl Voltage Signal M1 SO1Start OrderOverload Signal M2 Sack Acknowledgement Start OrderMCC Ready Signal M3 Run Running IndicationEmergency Stop M4 JogInd Jog IndicationShort Circuit M5 LocalInd Local IndicationSafety Interlock IC1 ManInd Manual mode IndicationSafety Interlock IC2 E1Ind E1 mode IndicationProcess Interlock IB1 E2Ind E2 mode IndicationProcess Interlock IB2 SP_Local Local SP IndicationProcess Interlock IB3 SP_Man Manual SP IndicationProcess Interlock IB4 SP_Ext External SP Indication Process Interlock for Group Start or Stop IA1 SP_OUT SP value indicationProcess Interlock for Group Start or Stop IA2 Ready Motor Ready in E1 or E2Start order pulse time T1Contactor time supervision T2Run interlock delay time T3Start order in E1 Mode E1StartStart order in E2 Mode E2StartE1 and E2 Stop StopMain Contactor Feedback Signal Ack1Motor Current MCAlarm Control Block AlcBlkJog Start Order JogStartJog start hold function JogFuncLocal Enable LEnblLocal Forward L1Local Stop LStopManual mode from logic SeqManE1 mode from logic SeqE1E2 mode from logic SeqE2Run Interlock 1 RunInt1Run Interlock 2 RunInt2Run Interlock 2 Function RunInt2FTrack A Enable (Auto to E1 Mode) Track_ATrack B Enable (Auto to Local Mode) Track_BMotor Temperature MotTempBearing Temperature BearTempSP Mode Local Enable Input from Logic MV_LenblSP Mode Man Enable Input from Logic SeqManSPSP Mode Ext. Enable Input from Logic SeqExtSPSpeed Indicator input MVSP Ramp Speed Speed1External SP ExtRefFigure 3-1. Function Block, Complete symbolFunctional Unit MOTFREQ01 Functional DescriptionTable 3-1 below illustrates the default properties of each terminal of MOTFREQ01function block.Index No. Terminal Data Type Attributes Direction Initial Value Description1 Name string coldretain in 'MotFreq' 'Name'2 Description string coldretain in 'Test Motfreq''Description'3 Enable bool coldretain in TRUE4 ME bool retain in 1 Control circuit alarm enable5 M1 bool retain in 1 Control voltage6 M2 bool retain in 1 Overload7 M3 bool retain in 1 Motor breaker8 M4 bool retain in 1 Emergency stop9 M5 bool retain in 1 Short Circuit 10 IC1 bool retain in 1 Safety Interlock 1 11 IC2 bool retain in 1 Safety Interlock 2 12 IB1 bool retain in 1 Process Interlock 1 13 IB2 bool retain in 1 Process Interlock 2 14 IB3 bool retain in 1 Process Interlock 3 15 IB4 bool retain in 1 Process Interlock 4 16 IA1 bool retain in 1 Sequence Interlock 1 17 IA2 bool retain in 1 Sequence Interlock 2 18 T1 time coldretain in 2s Start order pulse time 19 T2time coldretain in4s Contactor time supervision20 T3 time coldretainin 5s Run interlock delay time 21 E1Start bool in Start order in E1 mode 22 E2Start bool in Start order in E2 mode 23 Stop bool retain in 1 Stop order in E1 & E2 mode24Ack1bool retain in Main contactor acknowledge forward/high 25 MC real retain in Motor current 26 AlcBlk bool retain in 0 Alarm Control Block27 NoInt bool retain out Not interlocked 28 Trip bool retain out Tripped 29 Blk bool retain out Standby 30 RFS bool retain out Ready for start 31 SO1 bool retain out Start order 132 SAck bool retain out Start order acknowledgement 33 Run bool retain out 0 Run indication34 JogStart bool retain in Start order in Jog mode 35 JogFunc bool retain in 0 Jog start hold function 36 JogInd bool retain out Jog mode indication 37 LEnbl bool retain in 0 Local Enable from field 38 L1 bool retain in Start order in Local mode 39 LStop bool retain in 1 Local Stop order40 LocalInd bool retain out Local mode indication41 SeqMan bool in Order of Manual mode from logic 42 ManInd bool retain out Manual mode indication 43 SeqE1 bool in Order of E1 mode from logic 44 E1Ind bool retain out E1 mode indication45 SeqE2 bool in Order of E2 mode from logic 46E2IndboolretainoutE2 mode indication47 RunInt1 bool retain in 1 Run Interlock 1Functional Unit MOTFREQ01 Functional DescriptionIndex No. Terminal Data Type Attributes Direction Initial Value Description48 RunInt2 bool retain in 1 Run Interlock 2 49 RunInt2F bool retain in 0 Function for Run Interlock 250 Track_A bool retain in 1 Track A Enable - Bumpless from E1 to Auto 51Track_Bboolretainin1Track B Enable - Bumpless from Local to Auto52 MotTemp bool retain in 1 Motor Temperature 53 BearTemp bool retain in 1 Bearing Temp 54 MV_LEnbl bool retain in 0 SP Controlled from Local Panel 55 SeqManSP bool retain in 0 SP Mode Man from logic 56SeqExtSPboolretaininSP Mode External from Logic57 SP_Local bool retain out 0 Local SP indication 58 SP_Man bool retain out 0 Man SP indication 59 SP_Ext bool retain out 0 External SP indication 60 MV real retain in 0 Speed Indicator Input 61 Speed1 real retain in 2 SP Mode Ramp Speed 62 ExtRef real retain in 0 External SP Input 63 SP_OUTreal retain out 0 Control Signal Out64ReadyboolretainoutMotor Ready Indication in E1 or E2Table 3-1 Terminal PropertiesFunctional Unit MOTFREQ01 Functional DescriptionDescription4 FunctionProperties4.1 BasicThe MOTFREQ01 functional unit is designed for the control of variable speed motors, i.e.AC-Drives.MOTFREQ01 units consist of the following basic functions.• Supervision of control circuits• Evaluation of interlocks• Control of on/off• Supervision of motor current• Running of tests from the motor site• Control from the local operator's panel• Manual/External running• Supervision of operations via Operate IT Operator Station• Speed Setpoint Control4.2 Motor Control ModesMOTFREQ01 is intended for control from Operate IT Operator Station i.e. from a centralcontrol room. However, it is also possible to select other modes of control and thuscontrol MOTFREQ01 from other locations.All the control modes can be selected from the central operator station. The LOCALcontrol mode may also be selected from the local control station.The different modes of control are as follows:• Jog• Local• Manual• External 1• External 2By selecting control mode, the operator decides from which location the motor is to becontrolled. All control modes may be selected through dialog in Operate IT OperatorStation. The LOCAL control mode may also be selected from the local control stationthrough the Function Block input :LE, provided that the current control mode is neitherJOG, nor DISABLE.For the different control modes, MOTFREQ01 is controlled as follows. For a summary ofthe control modes, see Table 3-1.Functional Unit MOTFREQ01 Functional Description4.2.1 JOGT he control mode JOG is suitable for testing the motor in the field. The motor issupposed to be controlled from a stop/start station adjacent to the motor. Control from other locations is blocked.The supervision of interlocks is limited. Only the safety interlocks SafetyInt1 and SafetyInt 2 as well as faults in the control voltage chain (the inputs :M1 - :M5) prevent starting. The motor is started and stopped through the inputs :JogStart and :JogFunc.:JogStart, Start order from field-mounted start/stop station :JogFunc, Stop/Hold function from field-mounted start/stop stationThe function of these inputs is set out in tabular form below. :JogStart :JogFunc0 0 Stop order. 0 1 No change.1 0 Start and stop order in :JogStart input.1 1Start order on :JogStart and stop order on :JogFunc.When :JogFunc=1, the motor is stopped by breaking the control voltage chain, i.e. signified by any of the :M1 - :M5 inputs going low.4.2.2 LOCALT he motor is controlled from a local desk or panel. Control from other locations is blocked.LOCAL control mode, like other points of control, may be selected from Operate ITOperator Station. In addition, LOCAL control mode may be selected from the local control panel through the input :LEnbl as follows::LEnbl = 1: The control mode is LOCAL, as long as the Operate ITOperator Stationoperator does not request JOG or STAND BY. All other control modes are blocked and :LEnbl must be released before a mode change can occur.LEnbl -> 0: MOTFREQ01 resumes the either the previous or the latest control modecalled for from Operate ITOperator Station.Functional Unit MOTFREQ01 Functional DescriptionThe operator controls the motor through the inputs :Lstart and :LStop. :LStop Local stop order (active low) :Lstart Local start orderThe function of these inputs is set out in tabular form below. :Lstop :Lstart 0XStop order. Note In order for the motor to start when LStop has been low, LStop must be set high and LStart must make a low-to-high transition1 0 No change 1 1 Start order4.2.3 MANUALThe motor is controlled from Operate ITOperator Station. Control from other locations is blocked. This is the default control mode. To start, the operator has to press the key START. To stop the motor, the key STOP has to be pressed.4.2.4EXTERNAL 1 and EXTERNAL 2The motor is controlled from external signals, e.g. from a process signal. Control from other locations is blocked. This mode is e.g. used for on/off control of levels and for automatic start up and shutdown of belt conveyors etc.EXTERNAL 2 functions in exactly the same way as EXTERNAL 1. EXTERNAL 2 is used when the motor is to be controlled by Level 2 application software e.g. Auto Series Software.The function is enabled by inputs :SeqE1 and :SeqE2.The process controls the motor through the inputs :E1Start, :E2Start and :Stop. Theoperator is able to stop the motor by issuing stop order from Operate ITOperator Station. The control mode then changes to Manual, to prevent the motor from being restarted. :Stop Stop order (active low) :StartE1(2) Start orderThe function of these inputs is set out in tabular form below: :Stop :StartE1(2) 0 X Stop order 1 0 -> 1Start order:StartE1(2) are dynamic inputs, i.e. they trigger on the rising edge.4.2.5 DISABLEDThe motor is stopped and all orders to it are blocked. Used to take the motor Out of Service.4.3 SetpointModesAs for the Motor Control Modes above the speed setpoint can also be entered from a localcontrol station (the frequency converters control panel), or from the Operate IT OperatorStation or from a program in the AC800M.The different setpoint modes are as follows:• Local• Manual• ExternalBy selecting setpoint mode, the operator decides from which location the setpoint is to becontrolled. All setpoint modes may be selected through dialog in Operate IT OperatorStation.There is no correlation between motor control modes and setpoint modes i.e. when themotor is controlled using LOCAL this does not mean that the Setpoint changes mode toLOCAL too. If this functionality is required then the logic will need to be programmedexternally to the function block. All motor control modes are not affected by changes in theSetpoint modes.For the different setpoint modes, MOTFREQ01 is controlled as follows:Setpoint4.3.1 LOCALThe LOCAL setpoint mode may be selected from the local control station by using theFunction Block input :MV_Lenbl, or through the dialog in Operate IT Operator Station,provided function block is not disabled. All other setpoint modes are blocked and:MV_LEnbl must be released before a mode change can occur.The setpoint mode LOCAL is suitable entering a Setpoint from the frequency converter orfrom a local panel next to the motor. Setpoints from other modes are blocked. The outputterminal :SP_Local in the function block is set true indicating the mode is active.In LOCAL mode the output terminal :SP_OUT does not provide a setpoint to thefrequency converter because the frequency converter itself is providing this. The value ofthe Speed Indicator Input: MV is transferred to the output terminal: SP_OUT.4.3.2 MANUALSetpointThe MANUAL setpoint mode is selected by using the Function Block input: SeqManSP orthrough the dialog in Operate IT Operator Station, provided that function block is notdisabled.When in MANUAL setpoint mode it is possible to change the speed of the motor byentering the desired setpoint. Setpoints from other modes are blocked but it is stillpossible to change to these modes from the dialog in Operate IT Operator Station. Thedesired value is then available on the output: SP_OUT terminal. The output terminal:SP_Man in the function block is set true indicating the mode is active.4.3.3 EXTERNALSetpointThe EXTERNAL setpoint mode is selected by using the Function Block input: SeqExtSPor through the dialog in Operate IT Operator Station, provided that function block is notdisabled.The EXTERNAL mode enables a setpoint to be provided from an external signal e.g. froma PID controllers output. Setpoints from other modes are blocked but it is still possible tochange to these modes from the dialog in Operate IT Operator StationThe value at input terminal :EXTREF in the function block is then available at the outputterminal: SP_OUT. The output terminal: SP_Ext in the function block is set true indicatingthe mode is active.Speed4.4 SetpointTerminal :Speed1 is a coefficient used to restrict the ramp speed of the setpoint. Thevalue entered is the slope of the curve required. This value will depend on the range of thesetpoint. All setpoint changes are restricted by the ramp speed in all modes exceptingLocal setpoint mode. When changing to local mode from manual mode and external modethe local modes setpoint is indicated directly. In Local mode the setpoint is only displayedin MOTFREQ01, and setpoint speed has no affect.Setpoint Speed Coefficient = Setpoint Range / Ramp Time RequiredTracking4.5 SetpointThe setpoint tracking function is enabled by terminals :Track_A and :Track_B.Track_A is used to retain the external setpoint when changing mode from External toManual.Track_B is used to retain the local setpoint when changing mode from Local to Manual. 4.6 Ready for StartReady for start means that all the interlocks are satisfied, that there are no alarms andthat the control mode is not JOG or that the control is DISABLED.Ready for start is indicated by the MOTFREQ01 displays in the Operate IT OperatorStation and by the output terminal :RFS (Ready For Start) in the function block.4.7 ReadyThe output terminal: READY has the same functionality as the terminal: RFS but themotor has to be in External 1 or External 2 mode for the output to be set. This terminal isused in sequence applications to check the status of the motor i.e. when the motor is partof a sequence or group start.4.8 Start-upAn initialisation phase begins at start of the AC800M system.The result of this becomes:The outputs are reset (to zero) except for the ManInd terminal, which is set (to 1).Manual is the default control mode at system initialisation for both the motor and thesetpoint. With additional function block logic it is possible to force the control mode toother modes at system initialisation.4.9 InterlocksThe motor control can be interlocked by signals from the process and also by signals fromthe control logic. The interlocks are divided into four groups with the followingdesignations and functions.Safety Interlocks, which interlock the object for safety purposes. The two safetyinterlocks, :IC1 and :IC2, cannot be blocked.Process Interlocks. There are 4 normal process interlocks, :IB1 to :IB4. All four interlockscan be configured to accept blocking by the operator. All four interlocks can also beconfigured as start interlocks. A start interlock will prevent the motor from starting, but willnot stop a running motor.External (Sequence) Interlocks. Interlocks on terminals :IA1 and :IA2 are used if theobject is to be interlocked against other objects such as a pump motor or a group start orother conditions in an automatic sequence. These interlocks are configurable as blockedor not when not in E1 resp. E2 mode and the interlocks are not included in the conditionsfor indication of Ready for start.Run Interlocks. The inputs :RunInt1 and :RunInt2 are intended for connection tooperation monitors to obtain tripping or alarm in the event of faults. The inputs are to beTRUE when the equipment is faultless. In order to allow the motor to reach operationalspeed, RunInt1 and RunInt2 are blocked during the time :T3 after start-up. When theJOG control mode is selected, RunInt1 and RunInt2 are blocked. When RunInt1 orRunInt2 goes to 0, MOTFREQ01 remembers this error status until the alarm isacknowledged. Input :RunInt1 has a motor tripping function whereas the input :RunInt2function can be controlled with the parameter :RunInt2F. When input :RunInt2F = TRUE,the motor is tripped. With .RunInt2F = FALSE, only an alarm is given. Alarm handling of:RunInt1 and :RunInt2 is blocked internally in the Function Block with the motor atstandstill.An interlocking is active when the input is 0 (FALSE). All Process and External interlocksare blocked when the JOG control mode is selected.Alarms4.10 MotorInput terminals :MotTemp indicates that the motor has overheated. Terminal :BearTempindicates that the motor bearings have overheated. Both inputs terminals do not trip themotor but provide and alarm to the operator.4.11 Start and StopStart and stop commands for MOTFREQ01 may originate from dialog with Operate ITOperator Station or from Function Block inputs, depending on the control mode selected(See Section 4.2 Motor Control Modes, and Table 3.1).When a start command is issued to MOTFREQ01, it is forwarded to the motor through theFunction Block output :SO1 (Start order 1, Forwards/ High). See Section 4.11.2 StartOrder Selection. The start order on the output :SO1 is a pulse with a duration which isdetermined by the input :T1.The main contactor of the motor acknowledges the start order :SO1 by setting the input:ACK1 high. The main contactor must acknowledge within the time determined by theinput :T2. The time T2 ought to be set longer than T1.If the main contactor acknowledges the start order pulse :SO1 within the time T2,MOTFREQ01 sets the start order output :SO1 high and keeps it high. The time T3 afterthe main contactor having responded, MOTFREQ01 starts supervising the motor current.The time T3 is determined by the input :T3If the main contactor does not acknowledge the start order within the time T2, the startattempt is deemed abortive. Consequently, MOTFREQ01 issues an alarm about thecontactor failure and a new attempt at starting may be made.The contactor failure alarm indication on the object display of MOTFREQ01 disappearswhen the operator acknowledges the alarm.MOTFREQ01 also issues an alarm about main contactor failure when the contactoracknowledges start orders falsely, i.e. when it sets the inputs :ACK1 high without any startorder being issued. MOTFREQ01 transmits the alarm the time T2 after the input havingbeen set.4.11.1 Start and Stop Order at Different Motor Control ModesThe table below describes the commands which can be given at the different controlmodes of MOTFREQ01.Table 3-1. Relation between commands and control modesOrder Jog LocalManualExt1 Ext2Input JogStart StartStop - - - -InputLstart - Start- - -InputLstop - Stop- - -Operatorstart - - Start- -Operatorstop - -Stop Stop StopInputStartE1 - - - Start-InputStartE2 - - - -StartStop - - - StopStopSelectionOrder4.11.2 StartThe Function Block MOTFREQ01 has one start order output::SO1 Start order 1, Forwards/HighThe activation of the output is determined as follows from the different points of control.4.11.2.1 Control mode JOGFB input :JogStart4.11.2.2 Control mode LOCALFB input :LStart4.11.2.3 Control mode MANThe operator issues a Start order from Operate IT Operator Station.4.11.2.4 Control mode Ext1 or Ext2An superior control program sets the input :StartE1 or :StartE2 to issue a new start order.See the table below.:StartE1(2) Stop Descrchange.0 0 Nochange.1 0 Noorder1 1 Start4.11.2.5 Control mode DISABLEThe motor cannot be started.4.12 Fault Evaluation in the Control CircuitEvaluation is performed in the priority order M1 to M5. This means that if the Input :M1=0, the inputs :M2 - :M5 are not regarded etc. The signal ME interlocks the completeevaluation. ME=0 is used to prevent incorrect alarms with, for example, a total controlvoltage failure. The inputs M1 to M5 are to be TRUE when there are no errors. Theevaluation presupposes that the control circuit consists of a number of breaking contactsin series. Alarm handling of M1 to M5 is blocked internally in the Function Block with themotor at standstill.4.13 Supervision of Load ControlThe input MC is connected to the process signal for LOAD indication (Motor Current inMOTCON). This input on the function block is scalable and can be used to present themotor current or more aptly for frequency converters, the torque or power indication. Inthe function block the correct measurement range and engineering units can be entered.These will then be presented accordingly in the Faceplate and Object display in theOperate IT Operator Station.Info: Most modern AC Drives are have programmable outputs so that the correct signalcan be configured for power or torque and sent to the MC input.Window4.14 InteractionThe interaction window is available in the Control IT Control Builder. The interactionwindow is an engineering aid used to simplify configuration and blocking of signals notavailable on the faceplates. Changes to values in the Interaction window are onlyavailable in ‘Online’ mode in Control IT.WindowInteraction4.14.1 MOTFREQInteraction window overview. Name and description are shown. The buttons are links tosub-windows.Figure 4-1 Main Interaction Window.Parameters4.14.2 General“Class” defines the process section or area in which alarms are grouped. By utilizingclass the alarms can be filtered. Valid values are user defined. A suggestion would be touse mill area numbers as class values.“Severity defines the alarm priority for general alarms. The severity for MV-alarms isentered in window “Alarm & Event”. Valid values are 1 –1000 where 1000 is the highestpriority.Figure 4-2 General Parameters.4.14.3 Order & Order Event BlockBlocking of operator order and event handling of these are entered in this window.Figure 4-3 Order Block.4.14.4 Indication Event BlockEvent blocking of alarms and other indications are entered in this window.Figure 4-4 Indication Event Block.。
ABB800F功能块使用

1 E 控制功能块缩写说明OMnom: 正常工作方式OMact: 实际工作方式SPL: 内部设定点(操作员可以访问)SP1: 有效设定点(内部/外部)SP2: 有效设定点(同步化比率控制器)SP3: 有效设定点(限制的)SP4: 时间功能的实际设定点(斜波后)PV1: 无前馈变量干扰的控制变量PV2: 带前馈变量干扰的受控变量CE: 控制偏差CE1: 带前馈的控制偏差CE2: 时间功能的有效控制偏差(无区之后)CE3: 检查显示和报警值的有效偏差Vist: 实际比率(反比率控制器而言)OM: 手动输出OUT: 输出时间功能OUT1: 有效输出(手动/自动)OUT2: 有效输出(跟踪是/否)OUT3: 有效输出(前馈,只在自动,无跟踪)OUT4: 有效输出(限制的)OUT5: 有效输出(斜波后)OUT6: 输出功能的有效输出(手动设定之后)Fbsim: 模拟的(内部反馈)或叫虚拟的关于功能块时间功能的说明控制块的时间功能表示,一种P2D算法基于F列基本结构(图E-9)下面是影响时间功能的主要参数●比例系数KP●复位时间TN●提前量TV●微分增益KV相关的微分议程如下:比例作用Y P=K P●X D对有源积分作用Y P=K P●X D +AP 对无源积分作用积分作用Y I=K P /T N●∫x Ddt1微分作用Y D=K P /T V●d X D /dt – T1●dy D/dt ; T1= T V /K V输出变量Y= Y P +Y5+ Y D算法:对所有的算法,如果算法带积分作用则使用带绝对微分作用的增量控制算法。
如果不带积分作用则使用绝对位置算法。
根据配置的不同,D作用和P作用类似,当有源积分时可以用于受控变量PV或受控偏差CE。
在控制块说明中可以找到单独配置项。
(图E-10)1、无积分作用的控制器(P.PD)(图E-10)2、带积分作用的控制器(I.PI.PID)E3 连续控制器连续控制器的控制算法提供一个连续的输出变量信号OUT作为PID偏差控制的结果。
ABB水泥领域功能块说明
ABB⽔泥领域功能块说明现场控制器编程统⼀规定⼀、基本功能块1普通电机FC2002⾼压电机FC2013电动开关阀FC2034变频电机FC2045软启电机FC2056模拟反馈开关阀FC2067模拟量信号处理FB_AI8Pfister称FC2109窑主电机直流传动FC21110电磁阀FC21211稀油站(两台低压泵)FC21312粉研称FC21413卸料⼩车FC21814均化库底流量阀(南京院)FC21915稀油站(两台低压泵,两台⾼压泵)FC22116组起FC50017组起时序FC501⼆、功能块管脚定义及⾯板显⽰A普通电机FC200输⼊端:1组启信号(GST) 2组停信号(GSP) 3*单机启动(SST) 4*单机停车(SSP) 5解锁信号(ULK) 6启动联锁(SPT) 7安全联锁(SAF) 8⼯艺联锁(LCK) 9备妥(RDY)10紧急停车(EM)11运⾏信号(RUN) 12组启状态(SG)13故障复位(RST) FC200输出端:1驱动输出(DRV) 2综合故障(ALM)显⽰⾯板B⾼压电机FC201输⼊端:(⿏笼电机)(绕线电机)1组启信号(GST)2组停信号(GSP)4*单机停车(SSP)5解锁信号(ULK)6启动联锁(SPT)7安全联锁(SAF)8⼯艺联锁(LCK)9备妥(RDY)10紧急停车(EM)11运⾏信号(RUN)12组启状态(SG)13故障复位(RST)14设备运⾏保护联锁(LC1)15跳闸回路断线(LCO)16保护跳闸信号(PBR)17微机保护告警(PAL)18液体变阻器允许启动(SHZ)19液体变阻器转⼦短接(SCT)20液体变阻器故障分闸(SBR)FC201输出端:1驱动输出(DRV)2综合故障(ALM)C电动开关阀FC203输⼊端:1开信号(GST)2关信号(GSP)3*单机开(SST)4*单机关(SSP)5解锁信号(ULK)6启动联锁(SPT)7停⽌信号(SP)8备妥(RDY)10紧急停车(EM)11开运⾏信号(RUF)12关运⾏信号(RUR)12组启状态(SG)13故障复位(RST)14开限位(LIF)FC203输出端:1开驱动输出(DRF)2关驱动输出(DRR)2综合故障(ALM)3启动条件不满⾜(AL1)4备妥丢失(AL2)5开限位故障(A10)6关限位故障(A11)7⽆开应答信号(A12)8⽆关应答信号(A13)⾯板显⽰D变频电机FC204输⼊端:1组启信号(GST)2组停信号(GSP)3*主回路单机启动(SST)4*主回路单机停车(SSP)5解锁信号(ULK)6启动联锁(SPT)7安全联锁(SAF)8⼯艺联锁(LCK)9备妥(RDY)10紧急停车(EM)11运⾏信号(RUN)12组启状态(SG)13故障复位(RST)14*变频器单机启动(ST1)15*变频器单机停车(SP1)16变频器故障(F1)FC204输出端:1主回路驱动输出(DR1)2变频器驱动输出(DR2)3综合故障(ALM)⾯板显⽰E软启电机FC205输⼊端:1组启信号(GST)2组停信号(GSP)3*单机启动(SST)4*单机停车(SSP)5解锁信号(ULK)6启动联锁(SPT)7安全联锁(SAF)8⼯艺联锁(LCK)9备妥(RDY)10紧急停车(EM)11运⾏信号(RUN)12组启状态(SG)13故障复位(RST)FC205输出端:1驱动输出(DRV)2综合故障(ALM)⾯板显⽰F模拟反馈开关阀FC206输⼊端:1备妥(RDY)2开限位(LIF)3关限位(LIR)4反馈值(PV)5开应答(RNF)6关应答(RNR)FC206输出端:1开驱动输出(DR1)2关驱动输出(DR2)⾯板显⽰G模拟量信号处理FB_AI输⼊端:1源数据(SOU)FB_AI输出端:1⼯程值(RES)2低报警值(L)3⾼报警值(H)4⾼⾼报警值(HH)⾯板显⽰H Pfister称FC210输⼊端:1启动联锁(PMT)2安全联锁(SAF)3罗茨风机运⾏(LFR)4急停(EMB)5远程联锁信号(RLA)6运⾏(RUN)7综合报警(FA)8转⼦故障(RF)9称上闸阀关(VC)10仓底闸阀关(SC)11下料管助流应答(PA)12仓助流应答(SAA)13助流故障(AF)14累计量(AP)15瞬时流量(PV)16荷载率(LOD)17转速(RPM)18仓重(WGH)FC210输出端:1启动释放(RES)2远程联锁(L)3外部启停(H)4故障确认(HH)5排空下料管6助流释放7强制助流8空⽓1惰性⽓体0转换9急停输出10流量给定I窑主电机直流传动FC211输⼊端:1允许启动(SPT)2⼯艺联锁(LCK)3安全联锁(SAF)4备妥(RDY)5主回路合(MOB)6装置运⾏(RUN)7装置故障(ERR)8外部复位(RST)9电机电流反馈(PVC)10电机速度反馈(PVS)FC211输出端:1报警输出(ALM)2合主回路(DRV)3合励磁回路(DMA)⾯板显⽰J电磁阀FC2121组启信号(GST)2组停信号(GSP)3*单机启动(SST)4*单机停车(SSP)5解锁信号(ULK)6启动联锁(SPT)7安全联锁(SAF)8⼯艺联锁(LCK)9备妥(RDY)10紧急停车(EM)11运⾏信号(RUN) 12组启状态(SG) 13故障复位(RST)FC212输出端:2综合故障(ALM)⾯板显⽰H稀油站(两台低压泵)FC2131组启信号(GST)2组停信号(GSP)3*单机启动(SST)4*单机停车(SSP)5解锁信号(ULK)6允许启动(PMT)7允许停车(PMP)8备妥(I1)91#泵运⾏(I2)102#泵运⾏(I3)11加热运⾏(I4)12允许启主机(I5)13油站轻故障(I6)14油站重故障(I7)FC213输出端:1驱动输出(DRV、DR1、DR2) 2综合故障(ALM)⾯板显⽰I粉研称FC2141允许启动(PMT)2安全联锁(SAF)3*单机启动(SST)4*单机停车(SSP)5⼯艺联锁(ULK)6反馈(PV)7组启(STO)8组停(SPO)9遥控运转模式信号(I1)13锁风故障信号(I5)14环状天平故障信号(I6) 15供给机故障信号I7)16流量超差报警信号(I8)17容重超差报警信号(I9)18积算脉冲信号(I10)FC213输出端:。
ABB功能码中文资料

第一章功能码概述一、专用术语·功能码(Function Code):Symphony 系统提供了一系列完成不同功能的软件模块,并对每个软件模块指定一个代码,称为功能码。
·功能码数据库(Function Code Library):指功能码的集合,它存放在各种控制器的只读存储器(ROM)中。
每一种控制器的ROM中只存放该控制器组态所能使用的功能码。
·功能块(Function Block):当选用一个功能码时,必需指定一个块号(即块地址),该选定了的功能码称为功能块。
·规格参数(Specification)指功能码的输入参数。
规格参数有两种类型:-地址类的规格参数;-内部规格参数。
·功能码组态:根据过程控制方案,选择一些合适的功能码,将其互相连接,并对每个功能码指定其具体功能,将其存放到控制器的NVRAM中的过程称为功能码组态。
二、功能块SYMPHONY系统是由一套运用微处理器执行控制功能的模件组成的。
通过组态“功能块”,在主模件上实现控制功能的选择和相互配合。
一个功能块仅仅是一个输入或输出,或者是一个输入或输出的操作。
这些功能块是一般的软件控制算法,可以用它们来执行在其它类型系统需要专门硬件完成的指定任务。
有四种类型功能块:1.执行块2.系统常数块3.输入/输出块4.用户组态块执行块包含影响模件综合操作的一些参数。
系统常数块例如是0、1和100.0等这样的一些数字量参数和模拟量参数。
当用这些通常所用的值进行模件组态时,只要可能就应尽量使用这些系统常数块。
它们要求的内存比手动设定常数块少。
输入/输出块是一些固定块地址,它们对应于一个模件通过端子单元和现场布线的现场输入和输出。
用户组态块不是预先指定的块,而是由用户设定,以执行用户特需功能从而实现控制逻辑。
每个SYMPHONY主模件都有一套供选择的预先定义的块地址。
功能块的最基本类型是输入和输出。
每个输入或输出都在该模件的固件中被赋予一个块号。
abb变频器plc程序标准块
ABB变频器(Frequency Converter)通常是用于控制电机运行速度的设备,而PLC(Programmable Logic Controller)是用于自动化控制的可编程逻辑控制器。
在一些工业自动化场景中,可能需要将ABB 变频器和PLC结合使用。
对于这种情况,可以根据需要在PLC中编写程序来控制和监控ABB变频器的运行。
在编写PLC程序时,通常会使用不同的编程语言和标准块来实现特定的功能。
然而,ABB变频器的具体PLC程序标准块将取决于您所使用的PLC品牌和型号,以及ABB变频器的通信协议。
一般情况下,您可能需要编写的PLC程序标准块包括以下几类:1. **通信标准块:** 用于与ABB变频器进行通信,发送控制指令和接收状态信息。
这可能涉及PLC中的通信模块配置和通信协议的设置。
2. **启停控制标准块:** 用于启动和停止ABB变频器所控制的电机。
这包括设置变频器的运行模式、频率等参数。
3. **速度控制标准块:** 用于实现电机运行速度的控制。
您可能需要编写速度反馈环路、PID控制等相关标准块。
4. **故障检测标准块:** 用于监测ABB变频器和电机的状态,检测故障并触发相应的报警或保护动作。
5. **数据采集和监控标准块:** 用于从ABB变频器中采集数据并在HMI(Human-Machine Interface)上显示或记录。
6. **自动化流程控制标准块:** 用于将ABB变频器与其他自动化设备或过程集成,实现更复杂的控制逻辑。
以上仅是示例,具体的PLC程序标准块将根据您的应用和需求而有所不同。
在编写这些标准块时,通常需要参考ABB变频器的通信协议、指令集和控制逻辑。
由129块构成的ABB标准设备控制逻辑

由129块及其它功能块构成的ABB标准设备控制逻辑129块的状态表1.129块自动(超弛)状态此时S25参数必须为“1”。
S25参数连至“FOLLOW UP COMPLETE MOD ***”,当MFP 上电或复位后,经过一定延时该参数置“1”,使控制129块超弛状态参数S14的十位数字有效,否则状态不能超弛。
S25– COVRD Control override. When this input is one, the control status isforced good (0.0). The mode and output state control areselected with the tens digit in the control override definitionspecified by the control status override (S14).当有自动开关信号时,通过ADAPT块使129块的S14(Control output status override)参数改为“130”,129块切换到自动状态,通过TSTALM块(S2=2时,ALARM CONDDITION TESTED FOR “DEVICE DRIVERS”,N+1=“0”表示所检测的129块为“MAN”状态,N+1=“1”表示所检测的129块为“AUTO/REMOTE”状态)检测到129块切到自动状态后,开关触发器(为复位优先触发器,有自动开指令时S端置“1”,有自动关指令时S端置“0”,当自动状态且DCS状态时,其S端连至129块S1端)S=1,使129块S1S2=11(S2始终为“1”),输出“3”状态,使129块输出N(N+1)(N+2)=S10=100,使开指令为“1”。
当开关触发器(为复位优先触发器,有自动开指令时S端置“1”,有自动关指令时S端置“0”,当自动状态且DCS状态时,其S端连至129块S1端)S=0,使129块S1S2=01(S2始终为“1”),输出“1”状态,使129块输出N(N+1)(N+2)=S10=001,使关指令为“1”。
ABBCBF功能块之四

ABBCBF功能块之四
ABBCBF功能块之四
ABB CBF(Control Builder Function Block)是ABB公司专门为自动化系统开发的控制器编程工具。
它基于现代化的面向对象的方法,提供了一系列功能块,可用于创建复杂的控制逻辑,以满足不同工业过程的需求。
在ABBCBF中,功能块是一种可重复使用的软件模块,它封装了特定的功能和算法,并提供了输入和输出接口,用于与其他功能块或外部设备进行通信。
每个功能块都有一组参数,用于配置其行为和功能。
1.基本功能块
2.通信功能块
3.PID控制功能块
4.定时器功能块
5.故障处理功能块
6.数据处理功能块
7.触发器功能块
总结:
ABBCBF提供了丰富的功能块,可以满足不同工业过程的需求。
通过使用这些功能块,工程师可以更高效地开发控制逻辑,提高自动化系统的性能和可靠性。
功能块之间的连接和配置可以实现复杂的控制功能,同时也方便了模块化设计和重用。
ABB调节控制功能块
,以实数形式输入。 输出限制的作用 Active in Man and auto Active in auto Not active 下图是一种说明: (图 E-18 页) 输出上/下限是否起作用和工作方式有关,特别是考虑追踪,见下面的表。只有当控制 器带 TRC 输入时才能使用追踪,在相应的模块中有说明。 无追踪的自动方式: 只要输出上/下限在 Auto 配置为激活 ( acfive), 则考虑设置的输出上/下限。 无追踪的手动方式: 只要输出上/下限在手动配置为激活 (acfive), 则考虑设置的输出上/下限。注意:如果输出 范围缩小,则输出将跟随输出上 /下限 变 化 , 也就是说即使在手动方式,有时输出会使阀 门位置发生变化。如果输出范围扩大,会保 持当前位置不变。 追踪方式(手动或自动) 自动方式无追踪时要考虑输出上 /下限 设 置 , 于是激活的输出限位值来自正在进行跟踪的 手动 /自动方式以及来自有效配置的输出上 / 下限(在自动/手动方式激活) 。 Set point tracking (设定点追踪) Sp1 tracks actual �在外部方式时,内部设定点追踪外部设定 Set point 点 SP。 (sp1 追踪实际设定点) SP1 as adjusted �内部设定点不变 下图给出了说明: (图 E-20) E3.2 连续控制器,标准,C_CS (图 E-21 页) 功能: 简单的标准的连续控制器,不带控制器参数的外部变化选项。 可以有一个外部设定点 SP。 可以通过引脚(MM/MA 或 MI/ME)以及 Digivis 完成手动/自动方式以及内部/ 外部方式间的转换。如果逻辑 1 信号代表一个特定的方式,则禁止该方式转换 到 Digivis 。不管 Digivis 或引脚是否预先设置,在相应输出端( SMA 和 SIE ) 的激活方式是可用的。如果两组信号都有,控制器将工作在手动或内部方式 下表给出了与二进制输入相应的二进制输出(状态显示)信号: 输 入 输出 输 入 输出 MM MA SMA MI ME SIE 手 自 手/自 内 外 内/外 0 1 1 0 1 1 1 1 0 1 1 0 1 0 0 1 0 0 如果没有相关的输入设置为逻辑 1,则保持以前的工作状态不变,最多允许使用四个 常数或外部作为限位值,限位值对应受控变量或控制偏差。超过哪个限位值,相应的输出 SL1-SL4 设置为 1 �在自动和手动方式,输出变量 OUT 受输出上 限叫和输出下限 OL 的限制。 �仅在自动方式时, 输出变量 OUT 受输出上限 OH 和输出下限 OL 的限制。 �对输出变量 OUT 没有限制。
ABB监控功能块

YES YES YES YES
无通讯 RW RW RW
输入不等量的显示文本 使用外部记时打印机 功能块的信息 只用于内部
NO RO
处理状态 事实:功能块被处理
BOOL SMO 参数定义框 Bto Bt1 Tw TEXT TEXT TIME
NO RO
如果真实,那么监控已响应
YES YES YES
无通讯 无通讯 RW
显示文本为输入等量 显示文本为输入不等量 等待时间 信息(通知)
G5 一般性监控,M_GEN
(图见 G-15)功能 一般性的信息块的功能是产生带有预先定义信息值的信息。 当信号从输入 TRG(目标值)逻辑 -0 信号改变为逻辑-1 信号时,实际状态的信息被 产生。当在相对方向上信号改变时,实际状态的信息被产生。信息是预先定义的优先和文本 的输出。 此功能块可被使用在产生信息的用户一定义功能块中。为了达到此目的,信息数值必 须用于输入 VAL。所有不同于 DT,串行数据类型和绘声绘色数据类型的其他数据类型可被 隶属于输出 VAL。在输入 VAL 中瞬间触发的信息被采用在信息中。 此功能块也有可能产生于外部单元。为了此目的,外部记时打印机可被应用到输入 TSP。此记时打印机必须是系统时间的形式(格林威治时间—GMT) 。本地时区必须要转换 成系统时间,输入 TRG(目标值)每一次的状态改变,记时打印机都要复制到信息中去。 外部记时打印机的使用必须要激活参数定义框。如果外部记时打印机的使用被激活但 输入 TSP 没有连接,那么一个似科有理的检验错误准产生。 输出 SMO 指示信息状态。 输出 SAI 确认引入的信息状况, 并且输出 SAO 提供同样的外流信息的资料。 输出 SAI 和 SAO 的结果依赖于优先组态和确认定义的策略。 (图见 G-16) 输出 ERR(错误)是当: 输入 TSR 的外部记时打印机大于 12/31/2099,输出 STA=1。 输入 TSP 的外部记时打印机相同于 1/1/1970,输出 STA=2。 显示面 名称,简短文本和文本描述信息状态,带黄底色的目前状况。 功能块有一个小小的面板(1/4 显示面高度) 。 操作员介入 信息确认 G5.1 参数:一般性监控 M_GEN (图见 G-17)
ABB功能块
18/9路循环块GP18:
操作面板
温度仪表箱显示块T_VIEW_5/7/8/10:
• 功能: 用于不同数量的轴承、绕组温 度及振动模拟量的监测,显示及 报警 • 管脚介绍: 输出: TxH指定温度高报 输入: T温度输入 TxHH指定温度高高报 V振动输入 VxH指定振动高报 VxHH指定振动高高报 Txx指定最大温度 Vxx指定最大振动
温度仪表箱显示块T_VIEW_5/7/8/10:
温度仪表箱显示块T_VIEW_5/7/8/10:
操作面板
中国中材国际工程股份有限公司天津公司 电气自动化研究所信息化组
中国天津市北辰区引河里北道1号 邮编: 300400 电话: 86 22 26915035 传真: 86 22 26915004
模拟量输出块 AIO:
• 功能: 用于可控模拟量的输入显示和 控制输出 • 管脚介绍: 输入: IN硬件输入 输出: AO模拟量硬件给定 DIR外部输入使能 OUT模拟量显示 PV外部输入值
模拟量输出块 AIO:
操作面板
开关量输出块DO:
• 功能: 用于开关量输出打包转换 • 管脚介绍: 输入: O01~O16 16位开关量输出 输出: D_O 开关量硬件输出
开关量输出块DO:
操作面板
Байду номын сангаас
18/9路循环块GP18:
• 功能: 用于输出18/9路循环启动信号 • 管脚介绍: 输入:TPT允许启动 输出:LDR响铃驱动 GRD组备妥 Sxx:循环驱动 PPT允许停止 P01:停止 LRN响铃运行 EM急停 GAM组报警
速度检测块SPEEDDETECT :
ABB CBF功能块中文全集二
开路控制功能H2 独立的单向驱动功能块IDF-1(图H-6)功能:单通道独立的单向驱动功能块将控制命令转发到控制设备(如单向转动的电机、电磁阀等)该命令可以来自高阶控制(自动控制方式)或者是手动命令(手动工作方式)。
工作方式输入端MM和MA优先级较高,只有两个输入都为逻辑零时才可以自由地选择手动/自动。
如果两个输入都是逻辑1信号,则手动方式优先比自动方式高。
只有两个输入都为逻辑零时才可以自由地选择手动/自动。
如果现个输入都是逻辑1信号,则手动方式优先级比自动方式高。
控制命令的输出OUT可以与安全性、方向性、本地干预和错误信号有关。
控制命令改变后,将记录运行时间直到反馈产生(到达终点位置)。
可以是外部反馈,也可以是内部反馈。
如果运行时间超出允许范围则出现错误信息。
到达终点位置则在FBO或FB1输入一个0或1。
如果没有控制命令就离开终点位置,将产生一个错误信号。
不论运行时间监视功能是否激活,都会进行终点位置监视。
如果出现逻辑信号LOC,则忽略任何终点位置错误,也可以将其复位,只有连接了反馈输入时才能进行运行时间和终点位置监视。
禁止输入命令0和1的控制命令输出的改变可以单独使用输入ILO和IL1,自动方式和手动方式使用禁止功能。
安全干预输入PRO和PR1直接作用于控制命令,如果信号同时出现,则PRO 优先,即删除控制命令。
本地干预如果使用信号LOC,控制元素从本地传感器接收其信号,在这种情况下,功能块保持其工作方式不变并且跟踪其输出OUT到终点位置(输入FBO 和FB1)。
故障FLT信号删除控制命令并将工作方式改变为手动,接下来的动作和参数Reaction after trouble 的设置有关。
自动工作方式会清除“发送故障”,手动工作方式中可以用控制命令清除之。
干预的优先级为:1、过程2、本地干预3、安全干预4、故障5、禁止工作方式:手动自动X到终点位置是否正确的显示:名称、短文本,两个状态字段和配置的命令文本指明单独驱动模块的状态(引脚FBO和FB1),状态文本以黄色的背景进行显示,非活动状态的文本以黑灰背景显示。
ABB AC800F Training 3-4

FBD功能块图 ( FBD ) 是一种图形式的编程语言,遵从 IEC61131-3 标准。
通过功能块图特有的 CAD 功能,用户仅需要按照设计要求,将需要的功能及功能块从功能块库中调 出,参照设计要求与系统规范填写参数表,用软线将功能与功能块与现场过程变量连接 后,即完成用户组态;组态过程简便,用户无需具有计算机编程知识。
1功能块图(FBD )组态界面如图 3-1 所示,包括菜单行、工具棒、图形区、状态行 四部分。
图形区共有十页,页与页间用虚线分割,我们可以通过拖动下面或右边的滚动条改变图形区页面;图形区的网格允许用户打开或关闭;用户组态由功能块、功能、变量及连线组成,我们习惯将用户组态放在当前页中,一幅 FBD 图中建议放置一个相关组态程 序。
图 3-1 FBD 图组态界面3-1功能块组态介绍Receive能块集合3-2功能块组态介绍的显示颜色在 Control Builder 组态软件中,包括以下数据类型:REAL 、DINT 、INT 、UDINT 、 UINT 、DWORD 、WORD 、BYTE 、BOOL 、DT 、TIME ,这些数据依据其分类不同,在 WORD160~216-1word 3-3兰色粗2,554功能块组态介绍黑色细如果某个功能或功能块的放置位置需要改变,首先选中它,然后按住鼠标左键拖拽功能或功能块到指定位置后,释放鼠标左键。
双击某功能块或选中某功能块,用Edit Parameters 调出功能块参数表,按照需要填写相关参数。
信号-read 对应输入变量,信号-write 对应输出变量。
第一次写入的输入、输出变量必须指定数据类型,如果变量指定的数据类型与功能块要求的数据类型不一致,软连线的颜色显示为红色;必须进入变量表,修改数据类型。
按住 ctrl 键的同时拖动鼠标左键绘制连接软线。
如果出错表中显示有错误 ( Error ),必须更正错误。
只有经过检查 ( Check ) 后没有错误的组态,允许储存后退出。
ABBCBF功能块中文全集二

ABBCBF功能块中文全集二ABBCBF功能块中文全集二1.CBF适配器:CBF适配器用于将CBF与其他设备或系统进行连接。
它提供了与外部设备的接口,使得CBF可以与其他设备进行信息交换和通信。
2.CBF调度器:CBF调度器用于管理CBF中的任务和调度。
它可以根据设定的优先级和时间表来安排任务的执行顺序,确保CBF按照预定的方式进行操作。
3.CBF通信:CBF通信功能块用于处理CBF与其他设备之间的通信。
它可以处理多种通信协议和数据格式,包括串口通信、以太网通信和CAN总线通信等。
4.CBF输入输出:CBF输入输出功能块用于处理CBF的输入和输出信号。
它可以接收来自传感器和执行器的输入信号,并根据设定的逻辑进行处理和判断,然后产生相应的输出信号。
5.CBF报警:CBF报警功能块用于处理CBF中的报警信息。
它可以监测CBF的状态和参数,并在出现异常情况时产生报警信号,以便及时采取相应的措施。
6.CBF故障诊断:CBF故障诊断功能块用于诊断CBF中的故障和问题。
它可以根据CBF的运行情况和参数进行故障诊断,并提供相应的解决方案和建议。
7.CBF数据处理:CBF数据处理功能块用于处理CBF中的数据信息。
它可以对输入的数据进行筛选、过滤、计算和转换等操作,以符合实际应用的需求。
8.CBF用户界面:CBF用户界面功能块用于提供CBF的用户界面和操作界面。
它可以显示CBF的状态和参数,并提供相应的控制和配置功能,方便用户进行操作和监控。
9.CBF远程访问:CBF远程访问功能块用于实现对CBF的远程访问和操控。
它可以通过网络连接访问CBF,并进行相应的操作和监控,方便用户进行远程控制和管理。
10.CBF安全控制:CBF安全控制功能块用于实现CBF的安全控制和保护。
它可以根据安全策略和规则来管理和限制CBF的操作,确保CBF运行的安全性和可靠性。
以上是ABBCBF功能块中文全集二,总计1200字以上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
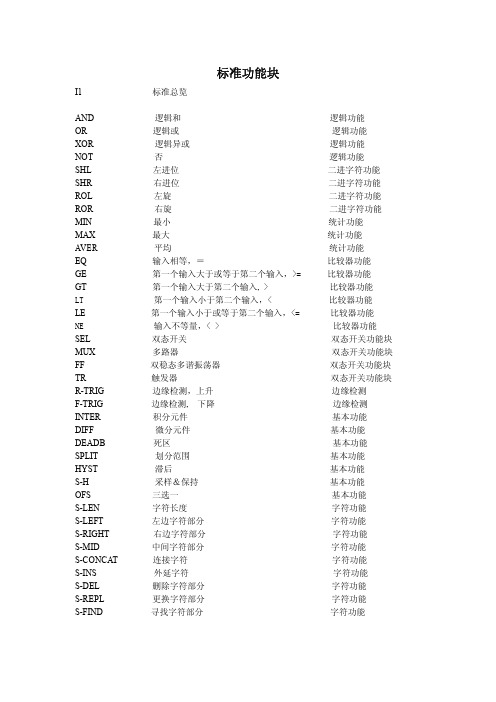
标准总览
标准功能块
逻辑和 逻辑或 逻辑异或 否 左进位 右进位 左旋 右旋 最小 最大 平均 输入相等,= 第一个输入大于或等于第二个输入,>= 第一个输入大于第二个输入, > 第一个输入小于第二个输入,< 第一个输入小于或等于第二个输入,<= 输入不等量,< > 双态开关 多路器 双稳态多谐振荡器 触发器 边缘检测,上升 边缘检测, 下降 积分元件 微分元件 死区 划分范围 滞后 采样&保持 三选一 字符长度 左边字符部分 右边字符部分 中间字符部分 连接字符 外延字符 删除字符部分 更换字符部分 寻找字符部分
I1
AND OR XOR NOT SHL SHR ROL ROR MIN MAX AVER EQ GE GT LT LE NE SEL MUX FF TR R-TRIG F-TRIG INTER DIFF DEADB SPLIT HYST S-H OFS S-LEN S-LEFT S-RIGHT S-MID S-CONCAT S-INS S-DEL S-REPL S-FIND
此功能积分一个与时间有关的模拟量。积分周期可在参数伪码中被输入一个固定的值,
积分时间或者可通过输入“T”来预先设定。也有可能增加一个常数列积分结果,要精确地
0=固定目前数值
1=输出低
2=输出高
I 7 标准/边缘检测功能块
I 7.1 边缘检测 RTIG,FTRIG
(见图 I-17)功能
如果正方向边缘(positive edge)作为功能 RTRIG 出现在输入 CLK,反方向边缘
(negative edge)作为功能 FTRIG,那么输出 Q 被设定到逻辑-1 信号。输出 Q 保留设定到
所有的输入和输出信号是相同的数据类型 REAL,UDINT,DINT,INT,DT 或字符数据类型
STR8-STR256
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设定。
类似的字符数据类型从左到右是基于相关的 ISO646 号码的数字化数值。如果字符有不同
的长度,那么最短的一个被看作是随零填充的。
逻辑功能 逻辑功能 逻辑功能 逻辑功能 二进字符功能 二进字符功能 二进字符功能 二进字符功能 统计功能 统计功能 统计功能 比较器功能 比较器功能 比较器功能 比较器功能 比较器功能 比较器功能 双态开关功能块 双态开关功能块 双态开关功能块 双态开关功能块 边缘检测 边缘检测 基本功能 基本功能 基本功能 基本功能 基本功能 基本功能 基本功能 字符功能 字符功能 字符功能 字符功能 字符功能 字符功能 字符功能 字符功能 字符功能
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设定。
类似的字符数据类型从左到右是基于相关的 ISO646 号码的数字化数值。如果字符有不同
的长度,那么最短的一个被看作是随零填充的。
例如:”a”大于”A”,
“au”大于”AU”
“ac”大于”abc”
最大输入是 10。
辑-0 信号或逻辑-1 信号被输出。在参数定义伪码中作出选择。
(见图 I-15)
显示
操作员介入
无
无
I 6.4.1 参数:触发器,TR
(见图 I-16)
扫描脉冲
在(1….32)范围内前输出 目前信号状态 Q 被保留
输出低
在输出 Q 上的逻辑-0 信号
输出高
在输出 Q 上的逻辑-1 信号
数据类型 BOOL,BYTE,WORD 或 DWORD 的输入信号被否定并且传送结果到输出。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。
显示
操作员介入
参数
无
无
无
I3 标准/位-字符功能
I3.1 左移位,右移位,SHL,SHR
(图见 I-8) 功能
这些功能通过一个位置从数据类型 DWORD,WORD 或 BYTE 将输入信号移位到左(SHL)
输入和输出的数据类型可通过菜单选项 Edit->Change data typ 进行设置。
显示
操作员介入 参数
无
无
无
I 6.2 多路器,MUX
(图 I-12)功能
上部的输入一般是 INT 数据类型,依靠目前的信号,使用它,接下来的输入中的一个可
被传到输出。就整数值 1 来说,第二个输入(第一个开关值)是开关直通,如果数值是 10,
显示
作员介入 参数
无
无
无
I 4.3 平均值,
(见图 I-10)功能
输入数值的平均值被计算兰,并且传送到输出。所有的输入和输出信号是相同的数据类
型 REAL,UDINT,DINT,IN 或 TIME。
输入和输出数据类型可通过菜单选项 Edit->Change data type 来进行设定。
最大输入值是 10。
无
无
无
I2.2
逻辑或,OR
(图见 I-6) 功能
此功能完成一位一位地 OR 输入互联以及传送结果到输出。
数据类型 BOOL 和 DWORD 允许当作输入和输出。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。
最大输入为 10。
显示
操作员介入
参数
无
无
无
I2.3
例 如 :“A”比“a”小
“AU”比“AZ”小
“abc”比“ac”小
最大输入是 10。
显示
操作员介入
参数
无
无
无
I4.2 最大,MAX
(图见 I-10) 功能
最大的相应输入值被传送到输出。
所有的输入和输出信号是相同的数据类型 REAL,UDINT,DINT,INT,DT 或字符数据类型
STR8-STR256
SR Flipflop 。重设信号 S 有优先权
I 6.3.2 功能块数据:Flip-Flop,FF
名称 数据类型 组态 输入
EN BOOL
yes
RW
R
BOOL
no
RW
S
BOOL
no
RW
输出
ENO BOOL
no
RO
BOOL
no
RO
BOOL
no
RO
内容
可以 事实:功能块被处理
重设 重设
处理状态 事实:功能块被处理
I 6.4.2 功能块数据:触发器,TR
名称
数据类型 组态
内容
输入
EN
BOOL
yes RW
能够
事实:功能块被处理
DIS 输出
BOOL
no RW
无输出功能
ENO
BOOL
no
RO
处理状态 事实:功能块被处理
Q
BOOL
no
RO
参数定义为伪码
输出
tu
INT
yes RW
扫描脉冲
vdis
INT
yes RW
在功能表上的响应
以下表格显示操作方式(状态):
RS Flipflop 输入 输出
SR Flipflop 输入 输出
SR
Q
00
X
01
0
10
1
11
0
SR
Q
00
X
01
0
10
1
11
1
X-输出 Q 没改变
显示
操作员介入
无
无
I 6.3.1 参数:双稳态多谐振荡器,FF
(见图 I-13)
RS Flipflop 。重设信号 R 有优先权
(ROR)。最远的左端位从位链释放且重新插入作为最远的右端位。
当 ROR(右移位)时移位逆向进行。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设定。结果被传送
到输出。
显示
操作员介入
参数
无
无
无
I4 标准/统计功能
I4.1 最小,MIN
(图见 I-9) 功能
最小的相应输入值被传送到输出。
输出 否定(取消)输出
参数定义伪码
RS
INT
yes RW
RS=Flipflop
0=RS-Flipflop,1=SR-Flipflop
I 6.4 触发器 TR (见图 I-15)功能
此功能处理输出 Q 在双态 1 和 0 时的信号。完全改变在任务周期中受影响。 扫描成为可能。 如果在输入 DIS 上出现逻辑-1 信号,那么输出功能被中断并且输出 Q 状态被固定,逻
逻辑异或,XOR
(图见 I-7) 功能
此功能完成一位一位地异或输入互联以及传送结果到输出。
数据类型 BOOL 和 DWORD 允许当作输入和输出。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。
最大输入为 10。
显示
操作员介入
参数
无
无
无
I2.4
否,NOT
(图见 I-7) 功能
或移位到右(SHR)。任一空位都被 0 填充。
输入和输出数据类型可通过菜单选项 Edit→Change data type 来进行设置。结果被传送到
输出。
显示
操作员介入
参数
无
无
无
I3.2 左旋,右旋,ROL,ROR
(图见 I-8) 功能
这些功能通过一个位置从数据类型 DWORD,WORD 或 BYTE 的输入信号到左(ROL)或
逻辑-1 信号,不是周期性的组态数就是个恒定数,除非要重新设定。这些功能功的输入和