MATLAB-语言及其应用电子教案
(完整版)matlab电子教案(1)
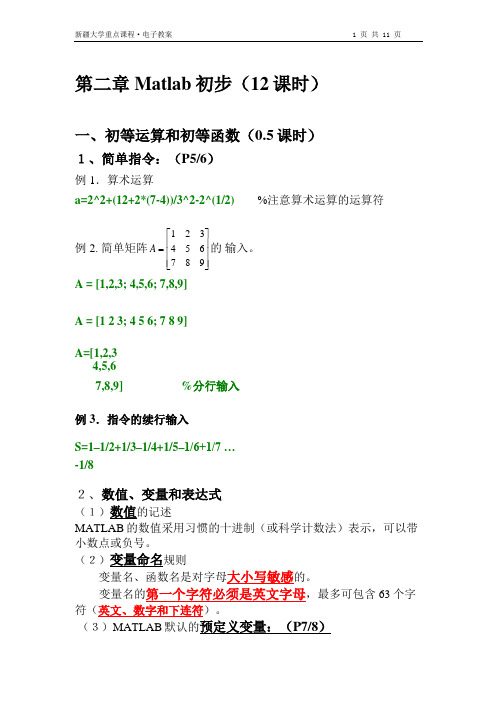
第二章Matlab 初步(12课时)一、初等运算和初等函数(0.5课时)1、简单指令:(P5/6)例1.算术运算 a=2^2+(12+2*(7-4))/3^2-2^(1/2) %注意算术运算的运算符例2. 简单矩阵⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=987654321A 的 输入。
A = [1,2,3; 4,5,6; 7,8,9]A = [1 2 3; 4 5 6; 7 8 9]A=[1,2,34,5,67,8,9] %分行输入例3.指令的续行输入S=1–1/2+1/3–1/4+1/5–1/6+1/7 …-1/82、数值、变量和表达式(1)数值的记述MATLAB 的数值采用习惯的十进制(或科学计数法)表示,可以带小数点或负号。
(2)变量命名规则变量名、函数名是对字母大小写敏感的。
变量名的第一个字符必须是英文字母,最多可包含63个字符(英文、数字和下连符)。
(3)MATLAB 默认的预定义变量:(P7/8)3、有关复数的函数:(P8/9)real(a) %给出复数a 的实部imag(a) %给出复数a 的虚部abs(a) %给出复数a 的模angle(a) %以弧度为单位给出复数a 的相位角例4.复数的运算——表达复数ie z i z i z 63212,21,43π=+=+=,及计算321z z z z =。
z1=3+4i %经典教科书的直角坐标表示法z2=1+2*i %运算符构成的直角坐标表示法z3=2*exp(i*pi/6) %运算符构成的极坐标表示法z=z1*z2/z3例5.复数矩阵的生成与计算(P15/10)A=[1,3;2,4]-[5,8;6,9]*iB=[1+5i,2+6i;3+8*i,4+9*i]C=A*B例6.求复数矩阵的实部、虚部、模和相角(接例5)C_real=real(C)C_imag=imag(C)C_magnitude=abs(C)C_phase=angle(C)*180/pi例7.复数的运算 ——计算-8的3次方根 (P10/11)(1) 直接计算时,得到的是处于第一象限的方根a=-8;r=a^(1/3)(2) 全部方根的计算% 先构造一个多项式a r r p -=3)(p=[1,0,0,-a]; %p 是多项式)(r p 的系数向量%指令末尾的“英文状态分号”使该指令运行后,不显示结果。
MATLAB语言及应用综合课程设计

MATLAB语言及应用综合课程设计一、教学目标本课程的教学目标是使学生掌握MATLAB编程基础,能够运用MATLAB解决简单的数学和工程问题。
具体目标如下:1.理解MATLAB的基本语法和结构。
2.掌握MATLAB的基本数据类型和运算符。
3.学会编写MATLAB脚本程序和函数程序。
4.熟悉MATLAB的数据可视化功能。
5.能够使用MATLAB进行简单的数学计算和矩阵操作。
6.能够利用MATLAB解决线性方程组、微分方程等问题。
7.能够使用MATLAB进行数据分析和图像处理。
8.能够编写MATLAB程序解决实际的工程问题。
情感态度价值观目标:1.培养学生的计算思维和问题解决能力。
2.培养学生对科学计算和工程技术的兴趣和热情。
3.培养学生的团队合作和交流能力。
二、教学内容根据课程目标,教学内容主要包括以下几个方面:1.MATLAB基本语法和结构:变量、数据类型、运算符、流程控制等。
2.MATLAB编程技巧:脚本程序、函数程序、字符串处理、文件操作等。
3.MATLAB数学计算:矩阵运算、线性方程组求解、微分方程求解等。
4.MATLAB数据可视化:二维和三维图形、图像处理、动画制作等。
5.MATLAB工程应用:信号处理、控制系统、优化问题等。
教学大纲将按照以上内容进行安排和进度控制,每个部分都会有相应的练习和案例分析,以确保学生能够扎实掌握MATLAB的基本知识和应用能力。
为了激发学生的学习兴趣和主动性,将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解MATLAB的基本概念和语法,使学生掌握MATLAB的基本知识。
2.案例分析法:通过分析实际案例,使学生了解MATLAB在工程中的应用和解决问题的能力。
3.实验法:通过上机实验,使学生亲自动手编写MATLAB程序,培养学生的实际操作能力和问题解决能力。
4.小组讨论法:通过小组讨论和合作,培养学生的团队合作和交流能力。
四、教学资源为了支持教学内容和教学方法的实施,将选择和准备以下教学资源:1.教材:《MATLAB入门与提高》2.参考书:《MATLAB编程与应用》3.多媒体资料:MATLAB软件及其教程、案例分析视频等。
MATLAB实用教程-电子教案
功
能
创建一个所有元素都为1的矩阵
创建一个所有元素都为0的矩阵
创建对角线元素为1,其他元素为0的矩阵
将输入矩阵的元素分配到输出矩阵中的指定位置
根据矢量创建对角矩阵
创建一个方形矩阵,其中行、列和对角线上元素的和相等
创建一个矩阵或数组,其中的元素为服从均匀分布的随机数 创建一个矩阵或数组,其中的元素为服从正态分布的随机数
(主要是基于数值式计算)
2.MathCAD 软件
MathCAD是美国Mathsoft公司推出的一个交互式的数学系统软件. 从早期的DOS下的1.0和Windows下的4.0版本,到今日的8.0版本,功能也从简单的数值计算,直至引 用Maple强大的符号计算能力、使得它发生了一个质的飞跃. MathCAD是集文本编辑,数学计 算,程序编辑和仿真于一体的软件.
创建一个二维字符串时,确定每行具有相同的长度,例如,下面两个字符串都有5个字符,用 它们组合起来的二维字符串是合法的。
name = ['Li Yi' ; 'Hu Xu '] name =
Li Yi Hu Xu
根据不同长度的字符串创建字符串时,将短的那些字符串后面用空格补齐,使所有字符串的 长度相同。
SAS意为统计分析系统,是由美国SAS研究所于1976年推出的用于决策支持的大型信息集成系 统.是当前最重要的专业统计软件之一.
SAS系统是一个由三十多个专用模块组成的大型集成式软件包.其功能包括客户机服务器计算, 数据访问,数据存储及管理,应用开发,图形处理,数据分析,报告编制,质量控制,项目管理,运筹学 方法,计量经济学与预测等.
5. SPSS软件
SPSS是软件英文名称的首字母缩写,原意为Statistical Package for the Social Sciences,即社会科学 统计软件包.
MATLAB语言及应用课程教学大纲
《MATLAB语言及应用》课程教学大纲课程编号:21311105总学时数:32总学分数:2课程性质:专业必修课适用专业:电气工程及其自动化一、课程的任务和基本要求:控制算法是集中现代控制系统CAD 技术的本质反映,对于控制算法系统深入地学习,在扩展计算机技术在控制理论中的应用和发展,同时培养学生运用计算机技术进行思维和开发的能力。
控制系统理论、计算方法与计算机技术的结合是当代控制理论发展的标志,因此在以MATLAB 为代表的软件平台上,对控制系统进行分析、设计与仿真将成为控制工程领域工程师必须熟练掌握的重要知识和技能。
因此,深入透彻地分析和理解控制算法的思想和构造就必须系统学习典型控制系统应用软件的基本原理和控制算法,将成为本课程的目的和任务。
通过本课程的学习,要求学生掌握对于控制系统的分析和综合设计的方法和基本技巧,而控制算法在控制系统CAD 技术中占有相当大的比重,本课程要求较熟练掌握控制算法的基本思想;MATLAB 是一种解释性编程语言,因此,要求熟练掌握MATLAB 的基本编程手段和模块化编程方法,消化和理解控制语言描述的图形界面的设计过程。
二、基本内容和要求:1.自动控制系统与仿真基础知识(1)自动控制系统基本概念(2)自动控制系统分类(3)控制系统仿真基本概念(4)MA TLAB与控制系统仿真(5)MA TLAB 7中控制相关的工具箱要求:了解自动控制系统与仿真的基础知识,包括自动控制系统的基本概念、分类,以及控制系统仿真的基本概念和Matlab工具。
2.MA TLAB计算及仿真基础(1)MA TLAB概述(2)MA TLAB桌面操作环境(3)MA TLAB数值计算(4)关系运算和逻辑运算(5)符号运算(6)复数和复变函数运算(7)MA TLAB常用绘图命令(8)MA TLAB程序设计要求:了解MA TLAB计算及仿真基础,包括MATLAB的安装、界面及其数值计算、函数运算、程序设计及其绘图命令。
《matlab语言及应用》教学大纲

课程编号X1602005《Matlab语言及应用》教学大纲Matlab language and application一、课程基本信息二、课程教学目标MATLAB语言与应用(Matlab language and application)是为信息工程专业开设的一门专业课,旨在向本专业学生介绍一种解决专业问题的快速有效且具有强大功能的科学与工程计算软件。
通过本课程的学习,希望学生获得一种从专业问题中抽象出数学模型进而运用MATLAB语言去求解的思维方法,训练综合运用语言和专业知识去解决问题的能力。
三、实验指导的基本要求1.掌握Matlab软件的基本使用。
2.掌握基本波形的产生的方法。
3.了解信号的各种运算和变换方法。
4.了解数据分析的相关函数。
5.掌握数字信号的变换技术。
6.掌握二维曲线和三维曲线绘制的步骤和方法。
7.掌握MATLAB程序设计的典型程序结构。
8.掌握数字滤波器的基本原理,掌握用Matlab设计实现IIR数字滤波器和FIR数字滤波器。
四、本课程的先导课程《高等数学》《概率论与数理统计》《数字信号处理》五、教学方法与手段教师讲授和学生上机相结合,讲练结合,采用多媒体教学手段为主,重点难点辅以板书。
六、考核方式与成绩评定办法考核形式为上机操作、提交Matlab程序文档及实验报告综合评定。
1、上机操作占总成绩的50%,主要由出勤率和上机表现构成。
2、提交Matlab程序文档占总成绩的30%,主要由程序文档内容达到当次实验要求的程度决定。
3、实验报告成绩占总成绩的20%,由各次实验报告撰写完成情况决定。
七、使用教材及参考书目【使用教材】薛年喜编. MATLAB在数字信号处理中的应用. 清华大学出版社,2008年1月出版。
【参考书目】1、刘卫国等编著. MATLAB程序设计与应用(第二版). 高等教育出版社,2006年2、张志涌等编著. 精通MATLAB6.5版. 北京航空航天大学出版社,2003年3、陈亚勇等编著. MA TLAB 信号处理详解. 人民邮电出版社,2001年八、课程结构和学时分配九、教学内容第一章 MATLAB R2006a基础(4学时)【教学目标】1. 了解Matlab语言的背景知识。
MATLAB语言及其应用教案
MATLAB语言及其应用教案第一章:MATLAB简介1.1 课程目标让学生了解MATLAB的发展历程及其在工程领域的应用让学生熟悉MATLAB的工作环境让学生掌握MATLAB的基本命令和操作1.2 教学内容MATLAB的发展历程MATLAB的工作环境MATLAB的基本命令和操作1.3 教学方法讲授结合实例演示学生上机操作练习1.4 课后作业熟悉MATLAB的工作环境掌握MATLAB的基本命令和操作第二章:MATLAB基本语法2.1 课程目标让学生了解MATLAB的基本语法规则让学生掌握MATLAB的数据类型和变量让学生熟悉MATLAB的数学运算2.2 教学内容MATLAB的基本语法规则MATLAB的数据类型和变量MATLAB的数学运算2.3 教学方法讲授结合实例演示学生上机操作练习2.4 课后作业熟悉MATLAB的基本语法规则掌握MATLAB的数据类型和变量熟练运用MATLAB的数学运算第三章:MATLAB编程技巧3.1 课程目标让学生了解MATLAB的编程技巧让学生掌握MATLAB的循环和条件语句让学生熟悉MATLAB的函数编程3.2 教学内容MATLAB的编程技巧MATLAB的循环和条件语句MATLAB的函数编程3.3 教学方法讲授结合实例演示学生上机操作练习3.4 课后作业熟悉MATLAB的编程技巧掌握MATLAB的循环和条件语句熟练运用MATLAB的函数编程第四章:MATLAB绘图功能4.1 课程目标让学生了解MATLAB的绘图功能让学生掌握MATLAB的基本绘图命令让学生熟悉MATLAB的绘图技巧4.2 教学内容MATLAB的绘图功能MATLAB的基本绘图命令MATLAB的绘图技巧4.3 教学方法讲授结合实例演示学生上机操作练习4.4 课后作业熟悉MATLAB的绘图功能掌握MATLAB的基本绘图命令熟练运用MATLAB的绘图技巧第五章:MATLAB在信号处理中的应用5.1 课程目标让学生了解MATLAB在信号处理领域的应用让学生掌握MATLAB信号处理的基本方法让学生熟悉MATLAB信号处理的实例5.2 教学内容MATLAB在信号处理领域的应用MATLAB信号处理的基本方法MATLAB信号处理的实例5.3 教学方法讲授结合实例演示学生上机操作练习5.4 课后作业熟悉MATLAB在信号处理领域的应用掌握MATLAB信号处理的基本方法熟练运用MATLAB信号处理的实例第六章:MATLAB在控制系统设计中的应用6.1 课程目标让学生了解MATLAB在控制系统设计领域的应用让学生掌握MATLAB控制系统设计的基本方法让学生熟悉MATLAB控制系统设计的实例6.2 教学内容MATLAB在控制系统设计领域的应用MATLAB控制系统设计的基本方法MATLAB控制系统设计的实例6.3 教学方法讲授结合实例演示学生上机操作练习6.4 课后作业熟悉MATLAB在控制系统设计领域的应用掌握MATLAB控制系统设计的基本方法熟练运用MATLAB控制系统设计的实例第七章:MATLAB在图像处理中的应用7.1 课程目标让学生了解MATLAB在图像处理领域的应用让学生掌握MATLAB图像处理的基本方法让学生熟悉MATLAB图像处理的实例7.2 教学内容MATLAB在图像处理领域的应用MATLAB图像处理的基本方法MATLAB图像处理的实例7.3 教学方法讲授结合实例演示学生上机操作练习7.4 课后作业熟悉MATLAB在图像处理领域的应用掌握MATLAB图像处理的基本方法熟练运用MATLAB图像处理的实例第八章:MATLAB在仿真建模中的应用8.1 课程目标让学生了解MATLAB在仿真建模领域的应用让学生掌握MATLAB仿真建模的基本方法让学生熟悉MATLAB仿真建模的实例8.2 教学内容MATLAB在仿真建模领域的应用MATLAB仿真建模的基本方法MATLAB仿真建模的实例8.3 教学方法讲授结合实例演示学生上机操作练习8.4 课后作业熟悉MATLAB在仿真建模领域的应用掌握MATLAB仿真建模的基本方法熟练运用MATLAB仿真建模的实例第九章:MATLAB在优化计算中的应用9.1 课程目标让学生了解MATLAB在优化计算领域的应用让学生掌握MATLAB优化计算的基本方法让学生熟悉MATLAB优化计算的实例9.2 教学内容MATLAB在优化计算领域的应用MATLAB优化计算的基本方法MATLAB优化计算的实例9.3 教学方法讲授结合实例演示学生上机操作练习9.4 课后作业熟悉MATLAB在优化计算领域的应用掌握MATLAB优化计算的基本方法熟练运用MATLAB优化计算的实例第十章:MATLAB在工程实践中的应用10.1 课程目标让学生了解MATLAB在工程实践领域的应用让学生掌握MATLAB工程实践的基本方法让学生熟悉MATLAB工程实践的实例10.2 教学内容MATLAB在工程实践领域的应用MATLAB工程实践的基本方法MATLAB工程实践的实例10.3 教学方法讲授结合实例演示学生上机操作练习10.4 课后作业熟悉MATLAB在工程实践领域的应用掌握MATLAB工程实践的基本方法熟练运用MATLAB工程实践的实例重点解析本文教案主要介绍了MATLAB语言及其在各个领域的应用。
Matlab语言及应用实验指导书
《Matlab语言及应用》上机实验指导书吉林大学地球探测科学与技术学院地球化学系2010年实验一MATLAB应用开发环境目的与要求(1)熟悉MATLAB桌面。
(2)掌握命令窗口的使用方法。
(3)了解MATLAB的帮助系统。
(4)基本掌握在MATLAB命令窗口中进行语言要素的基本操作。
实验准备(1)了解MATLAB的安装的软硬件要求。
(2)了解MATLAB的基本特征和基本语法。
(3)主要窗口的基本功能。
实验内容1.使用命令窗口启动MATLAB。
从“Desktop”菜单中选择Desktop layout->default,恢复MATLAB窗口的缺省设置。
Command Windows窗口中练习如下操作:(1)变量与基本运算(2)向量与矩阵的处理(3)常用数学函数(4)程序流程控制提示:在输入过程中注意符号的中文和西文的不同,Matlab语言使用的均为西文的符号。
(5) M文件首先,建立自己的工作目录mywork,然后利用File菜单中的Set Path将mywork目录添加到Matlab的搜索路径中。
利用MATLAB的M文件编制器,建立如下命令行文件:%This ls my first test M—file.%Roger Jang,March 3,1997fprintf('Start Of test.m!\n');for i=1:3,fprintf('i=%d-->i^3=%\n’,i,i^3);endfprintf('End of test.m!\n');以test1.m为文件名,保存在mywork目录中。
在命令窗口中键入test1 后执行,结果如下: Start of test.m!i=l ---> i^3=1i=2 ---> i^3=8i=3 ---> i^3=27End of test.m!按上述方法建立函数文件如下:function output=fact2(n)%FACT2 Calculate factorial of a given positive integer(recursive Version)if n==1 %Terminating conditionoutput=l;return;endoutput=n*fact2(n-1);以fact2.m为文件名,保存在mywork目录中。
应用matlab课课程设计

应用matlab课课程设计一、教学目标本课程的教学目标是使学生掌握 MATLAB 的基本操作和编程方法,能够利用MATLAB 进行简单的数学计算、数据分析、图像处理等操作。
通过本课程的学习,学生应达到以下具体目标:1.理解 MATLAB 的基本概念,如矩阵、数组、字符串等。
2.掌握 MATLAB 的基本语法和编程技巧,如变量定义、运算符、控制结构等。
3.熟悉 MATLAB 的函数库,并能运用相关函数进行数学计算、数据分析、图像处理等。
4.能够熟练使用 MATLAB 进行简单的数学计算和数据分析。
5.能够利用 MATLAB 绘制基本的图形和图像。
6.能够编写简单的 MATLAB 脚本程序,解决实际问题。
情感态度价值观目标:1.培养学生的创新意识和实践能力,提高他们运用科学工具解决实际问题的能力。
2.培养学生团队合作的精神,提高他们与人沟通和协作的能力。
二、教学内容根据课程目标,本课程的教学内容主要包括以下几个部分:1.MATLAB 基础知识:介绍 MATLAB 的基本概念、界面布局、命令窗口和脚本编程等。
2.MATLAB 数学计算:包括线性代数运算、数值计算、方程求解等。
3.MATLAB 数据分析:包括数据读取、处理、统计分析等。
4.MATLAB 图像处理:包括图像显示、转换、滤波等。
5.MATLAB 编程技巧:包括函数定义、面向对象编程、模块化编程等。
6.课程导入:介绍 MATLAB 的背景和发展历程,引导学生了解MATLAB 的应用领域。
7.MATLAB 基础知识:讲解 MATLAB 的基本概念和语法,让学生熟悉MATLAB 的操作界面。
8.MATLAB 数学计算:通过实例讲解MATLAB 在数学计算方面的应用,如线性方程组求解、微积分等。
9.MATLAB 数据分析:通过实例讲解MATLAB 在数据分析方面的应用,如数据读取、处理、统计分析等。
10.MATLAB 图像处理:通过实例讲解MATLAB 在图像处理方面的应用,如图像显示、转换、滤波等。
matlab基础与应用课程设计
matlab基础与应用课程设计一、教学目标本课程的教学目标旨在通过学习MATLAB基础与应用,使学生能够掌握MATLAB的基本语法、操作和编程技巧,熟练运用MATLAB解决工程和科研中的数学、计算和数据分析问题。
知识目标:了解MATLAB的发展历程、功能特点和应用领域;熟悉MATLAB的基本语法、数据类型、运算符、函数等基本元素;掌握MATLAB的编程结构、文件操作、绘图功能等。
技能目标:能够独立编写MATLAB脚本和函数文件,进行数学计算、数据分析、图像处理等;能够运用MATLAB解决实际问题,如线性方程组求解、微分方程求解、信号处理、优化问题等。
情感态度价值观目标:培养学生对科学计算和MATLAB软件的兴趣,提高学生运用计算机解决实际问题的能力,培养学生的创新精神和团队合作意识。
二、教学内容本课程的教学内容主要包括MATLAB的基本语法、操作和编程技巧,以及MATLAB在工程和科研中的应用。
第一部分:MATLAB基础。
介绍MATLAB的发展历程、功能特点和应用领域;学习MATLAB的基本语法、数据类型、运算符、函数等基本元素;掌握MATLAB的编程结构、文件操作、绘图功能等。
第二部分:MATLAB应用。
学习MATLAB在数学计算、数据分析、图像处理等方面的应用;通过案例学习,掌握MATLAB解决实际问题的方法和技巧。
第三部分:MATLAB编程实践。
通过项目式学习,培养学生运用MATLAB解决实际问题的能力,如线性方程组求解、微分方程求解、信号处理、优化问题等。
三、教学方法本课程采用讲授法、案例分析法、实验法等多种教学方法,以激发学生的学习兴趣和主动性。
讲授法:通过讲解MATLAB的基本语法、函数和操作方法,使学生掌握MATLAB的基础知识。
案例分析法:通过分析实际案例,使学生了解MATLAB在工程和科研中的应用,培养学生运用MATLAB解决实际问题的能力。
实验法:通过上机实验,使学生熟悉MATLAB的操作界面,提高学生的实际操作能力。
《Matlab教案》课件

《MATLAB教案》PPT课件第一章:MATLAB概述1.1 MATLAB简介介绍MATLAB的历史和发展解释MATLAB的含义(Matrix Laboratory)强调MATLAB在工程和科学计算中的应用1.2 MATLAB界面介绍MATLAB的工作空间解释MATLAB的菜单栏和工具栏演示如何创建、打开和关闭MATLAB文件1.3 MATLAB的基本操作介绍MATLAB的数据类型演示如何进行矩阵运算解释MATLAB中的向量和矩阵运算规则第二章:MATLAB编程基础2.1 MATLAB脚本编程解释MATLAB脚本文件的结构演示如何编写和运行MATLAB脚本强调注释和代码的可读性2.2 MATLAB函数编程介绍MATLAB函数的定义和结构演示如何创建和使用MATLAB函数强调函数的重用性和模块化编程2.3 MATLAB编程技巧介绍变量和函数的命名规则演示如何进行错误处理和调试强调代码的优化和性能提升第三章:MATLAB数值计算3.1 MATLAB数值解算介绍MATLAB中的数值解算工具演示如何解线性方程组和不等式解释MATLAB中的符号解算和数值解算的区别3.2 MATLAB数值分析介绍MATLAB中的数值分析工具演示如何进行插值、拟合和数值积分解释MATLAB中的误差估计和数值稳定性3.3 MATLAB优化工具箱介绍MATLAB优化工具箱的功能演示如何使用优化工具箱进行无约束和约束优化问题解释MATLAB中的优化算法和参数设置第四章:MATLAB绘图和可视化4.1 MATLAB绘图基础介绍MATLAB中的绘图命令和函数演示如何绘制二维和三维图形解释MATLAB中的图形属性设置和自定义4.2 MATLAB数据可视化介绍MATLAB中的数据可视化工具演示如何绘制统计图表和散点图解释MATLAB中的数据过滤和转换4.3 MATLAB动画和交互式图形介绍MATLAB中的动画和交互式图形功能演示如何创建动画和交互式图形解释MATLAB中的图形交互和数据探索第五章:MATLAB应用案例5.1 MATLAB在信号处理中的应用介绍MATLAB在信号处理中的基本概念演示如何使用MATLAB进行信号处理操作解释MATLAB在信号处理中的优势和应用场景5.2 MATLAB在控制系统中的应用介绍MATLAB在控制系统中的基本概念演示如何使用MATLAB进行控制系统分析和设计解释MATLAB在控制系统中的优势和应用场景5.3 MATLAB在图像处理中的应用介绍MATLAB在图像处理中的基本概念演示如何使用MATLAB进行图像处理操作解释MATLAB在图像处理中的优势和应用场景《MATLAB教案》PPT课件第六章:MATLAB Simulink基础6.1 Simulink简介介绍Simulink作为MATLAB的一个集成组件解释Simulink的作用:模型化、仿真和分析动态系统强调Simulink在系统级设计和多领域仿真中的优势6.2 Simulink界面介绍Simulink库浏览器和模型窗口演示如何创建、编辑和运行Simulink模型解释Simulink中的块和连接的概念6.3 Simulink仿真介绍Simulink仿真的基本过程演示如何设置仿真参数和启动仿真解释Simulink仿真结果的查看和分析第七章:MATLAB Simulink高级应用7.1 Simulink设计模式介绍Simulink的设计模式,包括连续、离散、混合和事件驱动模式演示如何根据系统特性选择合适的设计模式解释不同设计模式对系统性能的影响7.2 Simulink子系统介绍Simulink子系统的概念和用途演示如何创建和管理Simulink子系统解释子系统在模块化和层次化设计中的作用7.3 Simulink Real-Time Workshop介绍Simulink Real-Time Workshop的功能演示如何使用Real-Time Workshop进行代码解释代码对于硬件在环仿真和嵌入式系统开发的重要性第八章:MATLAB Simulink库和工具箱8.1 Simulink库介绍Simulink库的结构和分类演示如何访问和使用Simulink库中的块解释Simulink库对于模型构建和功能复用的意义8.2 Simulink工具箱介绍Simulink工具箱的概念和功能演示如何安装和使用Simulink工具箱解释Simulink工具箱在特定领域仿真和分析中的作用8.3 自定义Simulink库介绍如何创建和维护自定义Simulink库演示如何将自定义块添加到库中解释自定义库对于个人和组织级模型共享的重要性第九章:MATLAB Simulink案例分析9.1 Simulink在控制系统中的应用介绍控制系统模型在Simulink中的构建演示如何使用Simulink进行控制系统设计和分析解释Simulink在控制系统教育和研究中的应用9.2 Simulink在信号处理中的应用介绍信号处理模型在Simulink中的构建演示如何使用Simulink进行信号处理仿真解释Simulink在信号处理领域中的优势和实际应用9.3 Simulink在图像处理中的应用介绍图像处理模型在Simulink中的构建演示如何使用Simulink进行图像处理仿真解释Simulink在图像处理领域中的优势和实际应用第十章:MATLAB Simulink项目实践10.1 Simulink项目实践流程介绍从需求分析到模型验证的Simulink项目实践流程演示如何使用Simulink进行项目规划和实施解释Simulink在项目管理和协作中的作用10.2 Simulink与MATLAB的交互介绍Simulink与MATLAB之间的数据交互方式演示如何在Simulink中使用MATLAB函数和脚本解释混合仿真模式对于复杂系统仿真的优势10.3 Simulink项目案例分析具体的Simulink项目案例演示如何解决实际工程问题解释Simulink在工程教育和项目开发中的应用价值《MATLAB教案》PPT课件第十一章:MATLAB App Designer入门11.1 App Designer简介介绍App Designer作为MATLAB中的应用程序开发环境解释App Designer的作用:快速创建跨平台的MATLAB应用程序强调App Designer在简化MATLAB代码部署和用户交互中的优势11.2 App Designer界面介绍App Designer的用户界面和工作流程演示如何创建新应用和编辑应用界面解释App Designer中的组件和布局的概念11.3 App Designer编程介绍App Designer中的MATLAB编程模式演示如何使用App Designer中的MATLAB代码块解释App Designer中事件处理和应用程序生命周期管理的重要性第十二章:MATLAB App Designer高级功能12.1 App Designer用户界面设计介绍App Designer中用户界面的定制方法演示如何使用样式、颜色和主题来美化应用界面解释用户界面设计对于提升用户体验的重要性12.2 App Designer数据模型介绍App Designer中的数据模型和模型视图概念演示如何创建、使用和绑定数据模型和视图解释数据模型在应用程序中的作用和重要性12.3 App Designer部署和分发介绍App Designer应用程序的部署和分发流程演示如何打包和发布应用程序解释如何为不同平台安装和运行App Designer应用程序第十三章:MATLAB App Designer案例研究13.1 图形用户界面(GUI)应用程序设计介绍使用App Designer设计的GUI应用程序案例演示如何创建交互式GUI应用程序来简化MATLAB脚本解释GUI应用程序在数据输入和结果显示中的作用13.2 数据分析和可视化应用程序设计介绍使用App Designer进行数据分析和可视化的案例演示如何创建应用程序来处理和显示大型数据集解释App Designer在数据分析和决策支持中的优势13.3 机器学习和深度学习应用程序设计介绍使用App Designer实现机器学习和深度学习模型的案例演示如何将MATLAB中的机器学习和深度学习算法集成到应用程序中解释App Designer在机器学习和深度学习应用部署中的作用第十四章:MATLAB App Designer实战项目14.1 App Designer项目规划和管理介绍App Designer项目的规划和管理方法演示如何组织和维护大型应用程序项目解释项目管理和版本控制对于团队协作的重要性14.2 App Designer与MATLAB的集成介绍App Designer与MATLAB之间的数据和功能集成演示如何在App Designer中调用MATLAB函数和脚本解释集成MATLAB强大计算和分析能力的重要性14.3 App Designer项目案例实现分析具体的App Designer项目案例实现过程演示如何解决实际工程项目中的问题解释App Designer在工程项目实践中的应用价值第十五章:MATLAB App Designer的未来趋势15.1 App Designer的新功能和技术介绍App Designer的最新功能和技术发展演示如何利用新功能和技术提升应用程序的性能和用户体验强调持续学习和适应新技术的重要性15.2 App Designer在跨平台开发中的应用介绍App Designer在跨平台应用程序开发中的优势演示如何创建适用于不同操作系统的应用程序解释跨平台开发对于扩大应用程序市场的重要性15.3 App Designer的未来趋势和展望讨论App Designer在未来的发展趋势和潜在应用领域激发学生对于应用程序开发和创新的兴趣强调持续探索和创造新应用的重要性重点和难点解析本文档为您提供了一份详尽的《MATLAB教案》PPT课件,内容涵盖了MATLAB 的基本概念、编程基础、数值计算、绘图和可视化、应用案例、Simulink的基础知识、高级应用、库和工具箱的使用、案例分析以及项目实践、App Designer 的基础知识、高级功能、案例研究、实战项目和未来趋势等方面的内容。
MATLAB-语言及其应用课程设计
《MATLAB 语言及其应用》课程设计摘要: MATLAB是进行科学研究和数值分析的首选软件,本次对于给定开环函数的研究正是借助MATLAB的强大功能,通过编写程序实现了信号的数字化处理,然后绘图直观进行仿真分析。
关键词:MATLAB;数字化;仿真引言MATLAB科学与工程计算的高级语言, 同时也是适用于科学和工程计算的数学软件系统。
作为数值软件的MATLAB , 对计算数学领域的特定问题类型, 如数值线性代数、微分方程数值解、数值逼近、最优化方法、数值积分等进行求解, 可以得到问题的离散解或近似的解析表达式。
针对每一类问题的求解, MATLAB 都能给出该类问题的各种高效算法。
MATLAB 具有一个阵容强大、范围广泛的基本运算体系。
MATLAB 极其简洁的语言结构支持结构化程序设计, 且具有超过任一高级语言系统的调试技术。
MATLAB 高度智能化的调试技术是用户开发MATLAB 程序的有力工具。
设计目的(1)利用MATLAB语言仿真工具,在计算机上对人工设计系统进行仿真调试,使其满足技术要求,并绘制打印出仿真框图、频率特性图及动态响应图。
(2)掌握自动控制原理的时域分析法,根轨迹法,频域分析法,以及各种补偿(校正)装置的作用及用法,能够利用不同的分析法对给定系统进行性能分析,能根据不同的系统性能指标要求进行合理的系统设计,并调试满足系统的指标。
(3)学会使用MATLAB 语言及应用进行系统仿真与调试(4)锻炼独立思考和动手解决控制系统实际问题的能力(5)培养理论联系实际的设计思想,训练综合运用经典控制理论和相关课程知识的能力设计题目(1)系统的开环传递函数为:)12.0)(11.0()(++=s s s K s G ,设计一个PID 校正环节,要求系统为:1).系统响应斜坡信号r(t)=t 时,稳态误差小于等于0.01,2).系统的相角裕度40γ≥︒系统的分析该系统为I 型系统由条件(1)得01.0K1Ess ≤=))(()(取1s 2.01s 1.0s 100s G 100K 100K ++=∴=≥该系统是不稳定的则)(令)(‘。
MATLAB语言及其应用课件CH03matlab程序设计
的“新建”命令按钮。 2. 编辑已有的M文件
3.1.2 M文件的分类
➢分类:命令文件(Script File)和 函数文件(Function File)。
y=x*sqrt(x+sqrt(x)); end y
3.多分支if语句 语句格式为: if 条件1
语句组1 elseif 条件2
语句组2
…… elseif 条件m
语句组m 语句组m+1
end
else
例3.9 输入一个字符,若为大写字母,则输出其后继字符, 若为小写字母,则输出其前导字符,若为数字字符则输出 其对应的数值,若为其他字符则原样输出。 程序如下: c=input('请输入一个字符','s'); if c>='A' & c<='Z' disp(setstr(abs(c)+1)); elseif c>='a'& c<='z' disp(setstr(abs(c)-1)); elseif c>='0'& c<='9' disp(abs(c)-abs('0')); else disp(c); end
例3.18 编写函数文件求半径为r的圆的面积和周长。
函数文件如下:
function [s,p]=fcircle(r)
%CIRCLE calculate the area and perimeter of a circle of
《MATLAB语言及其应用》教案(最新整理)
MATLAB语言及其应用教案任课教师:罗靖宇任课班级:09通信(1)(2)教材:MATLAB程序设计与应用(第二版)作者:刘卫国主编出版社:高等教育出版社内容:书籍简介:本书以MATLAB 7.0版为蓝本介绍MATLAB 功能与应用强调理论和实践相结合贴近读者需要注重讲清有关数学方法和算法原理前提下介绍MATLAB功能;注重和有关学科领域结合,突出应用书中有许多应用实例些实例既是对MATLAB重点和难点诠释又可以更好地帮助读者应用MATLAB 来解决实际问题具有很强代表性。
全书分为基础篇应用篇和实验篇基础篇包括MATLAB 系统环境MATLAB数据及其运算MATLAB矩阵分析与处理 MATLAB 程序设计MATLAB 图MATLAB 数值计算MATLAB符号计算应用篇包括MATLAB图形用户界面设计MATLAB Notebook使用MATLABSimulink 仿真软件MATLAB 外部程序接口技术MATLAB 应用实验篇和教学内容相配合包括15实验以帮助读者更好地上机操作。
本书可作为高等学校理工科各专业大学生或研究生学习教材也可供广大科技工作者参考。
第1章MATLAB系统环境 1.1 MATLAB概貌 1.1.1 MATLAB 发展 1.1.2 MATLAB 主要功能 1.1.3 MATLAB功能演示 1.2 MATLAB环境准备 1.2.1 MATLAB 安装 1.2.2 MATLAB 启动与退出 1.3 MATLAB操作界面 1.3.1 主窗口 1.3.2 命令窗口 1.3.3 工作空间窗口 1.3.4 当前目录窗口和搜索路径 1.3.5 命令历史记录窗口 1.3.6 Stalt菜单1.4 MATLAB帮助系统 1.4.1 帮助命令 1.4.2 帮助窗口 1.4.3 演示系统 第2章MATLAB数据及其运算 2.1 MATLAB数据特点 2.2 变量及其操作 2.2.1 变量与赋值 2.2.2 变量管理 2.2.3 数据输出格式 2.3 MATLAB矩阵表示 2.3.1 矩阵建立 2.3.2 冒号表达式 2.3.3 矩阵拆分 2.4 MATLAB数据运算 2.4.1 算术运算 2.4.2 关系运算 2.4.3 逻辑运算 2.5 字符串 2.6 结构数据和单元数据 2.6.1 结构数据 2.6.2 单元数据第3章MATLAB矩阵分析与处理 3.1 特殊矩阵 3.1.1 通用特殊矩阵 3.1.2 用专门学科特殊矩阵3.2 矩阵结构变换 3.2.1 对角阵与三角阵 3.2.2 矩阵转置与旋转3.3 矩阵求逆与线性方程组求解 3.3.1 矩阵逆与伪逆 3.3.2 用矩阵求逆方法求解线性方程组 3.4 矩阵求值 3.4.1 方阵行列式值 3.4.2 矩阵秩与迹 3.4.3 向量和矩阵范数 3.4.4 矩阵条件数 3.5 矩阵特征值与特征向量 3.6 矩阵超越函数第4章MATLAB程序设计 4.1 M文件 4.1.1 M文件分类 4.1.2 M文件建立与打开4.2 程序控制结构顺序结构、选择结构、循环结构4.3 函数文件4.4 程序调试 第5章MATLAB绘图5.1 二维图形5.2 三维图形5.3 三维图形的精细处理5.4 隐函数绘图5.5 底层绘图操作5.6 光照与材质5.7 图像显示与动画 第6章MATLAB数值计算6.1 数据处理与多项式计算6.2 数值微积分6.3 离散傅里叶变换6.4 线性方程组求解6.5 非线性方程与最优化问题求解6.6 常微分方程的数值求解6.7 稀疏矩阵 第7章MATLAB符号计算7.1 符号计算基础7.2 符号函数及其应用7.3 符号积分7.4 级数7.5 符号方程求解应用篇 第8章MATLAB图形用户界面设计8.1 菜单设计8.2 对话框设计8.3 可视化图形用户界面设计 第9章MATLABNotebook 使用9.1 NOTEBook的安装于启动9.2 单元的定义与执行9.3 输出格式控制 第10章MATLABSimlllink仿真软件10.1 Simlllink操作基础10.2 系统仿真模型10.3 系统的仿真10.4 使用命令操作对系统进行仿真10.5 子系统及其封装技术10.6 S函数的设计与应用 第11章MATLAB外部程序接口技术11.1 MATLAB的数据接口11.2 MATLAB编译器11.3 MATLAB计算引擎11.4 MEX动态链接函数接口 第12章MATLAB 应用12.1 MATLAB在电路分析中的应用12.2 MATLAB在控制系统分析中的应用12.3 MATLAB在数学建模中的应用12.4 MATLAB在力学及工程结构分析中的应用12.5 MATLAB在优化设计中的应用实验篇 实验要求 实验MATLAB运算基础 实验二MATLAB矩阵分析与处理 实验三选择结构程序设计 实验四循环结构程序设计 实验五函数文件 实验六高层绘图操作 实验七低层绘图操作 实验八数据处理与多项式计算 实验九数值微积分与方程数值求解 实验十符号计算基础与符号微积分 实验十级数与方程符号求解 实验十二菜单与对话框设计 实验十三Simulink 应用 实验十四外部程序接口 实验十五综合实验第1章MATLAB系统环境本章重点:发展、功能、操作界面、帮助课时安排:2课时内容安排:1、概述:MATLAB 发展、MATLAB 主要功能(1)发展MATLAB名字由MATrix和LABoratory 两词的前三个字母组合而成。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
7
8
【例6-1】
9
超前滞后校正器 超前校正器
10
11
12
▪ 基于模型匹配算法的设计方法
假设受控对象的传递函数为
,
期望闭环系统的频域响应为
,
超前滞后校正器的一般形式为
使得在频率段
内闭环模型对期望闭环模型
匹配指标
为最小
13
提出了下面的设计算法
其中
14
其中,gp 和 f 分别为受控对象和期望闭环 系统的传递函数模型,w1 和 w2 为需要拟 合的频率段上下限。
15
【例6-2】受控对象模型为
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
16
6.1.3 控制系统工具箱中的设计界面
控制器设计界面
界面允许选择和修改控制器的结构,允许添 加零极点,调整增益,从而设计出控制器模型。
17
【例6-3】受控对象和控制器的传递函数模型分别为
47
▪ 离散增量式 PID 控制器
48
▪ 抗积分饱和 (anti-windup) PID 控制器
49
6.3.2 过程系统的一阶延迟模型近似
带有时间延迟一阶模型 (first-order lag plus delay, FOLPD) 一阶延迟模型 (FOLPD) 的数学表示为
50
由响应曲线识别一阶模型
55
【例6-10】
56
57
改进的 Ziegler-Nichols 算法
58
初始点 A 增益 期望点 A1 增益 PID 控制器
59
PI 控制器
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
60
PID 控制器
61
【例6-11】
62
63
改进 PID 控制结构与算法
到任意地方。
20
6.2.2 线性二次型指标最优调节器
假设线性时不变系统的状态方程模型为
设计一个输入量 , 使得最优控制性能指标 最小
21
则控制信号应该为 由简化的 Riccati 微分方程
求出
假设
,其中
,则
可以得出在状态反馈下的闭环系统的状态方程为
依照给定加权矩阵设计的 LQ 最优控制器
22
离散系统二次型性能指标 离散 Riccati 代数方程 这时控制律为
35
36
带有观测器的状态反馈控制结构图
37
38
39
如果参考输入信号
,则控制结构
化简为
40
【例6-8】
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
41
42
6.3 过程控制系统的 PID 控制器设计
6.3.1 PID 控制器概述
连续 PID 控制器
MATLAB-语言及其应用
6.1 超前滞后校正器 设计方法
6.1.1 串联超前滞后校正器
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
2
▪ 超前校正器
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
3
▪ 滞后校正器
控制系统计算机辅助设计——MATLAB语言与应用
调用编写的 MATLAB 函数 getfolpd( ) , key=3
53
最优降阶方法
调用编写的 MATLAB 函数 getfolpd( ) , key=4
【例6-9】
54
6.3.3 Ziegler-Nichols 参数整定方法
Ziegler-Nichols 经验公式
编写 MATLAB 函数 ziegler( )
微分动作在反馈回路的 PID 控制器
64
精调的 Ziegler-Nichols 控制器及算法
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
18
6.2 基于状态空间模型的 控制器设计方法
6.2.1 状态反馈控制
19
将
代入开环系统的状态方
程模型,则在状态反馈矩阵 下,系统的闭环状
态方程模型可以写成
如果系统
完全可控,则选择合适的 矩
阵,可以将闭环系统矩阵
的特征值配置
23
【例6-4】
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
24
6.2.3 极点配置控制器设计
系统的状态方程为
则系统的闭环状态方程为
25
26
Bass-Gura 算法
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
27
基于此算法编写的 MATLAB 函数
43
连续 PID 控制器 Laplace 变换形式
44
离散 PID 控制器
45
离散形式的 PID 控制器
Z 变换得到的离散 PID 控制器的传递函数
46
PID 控制器的变形
▪ 积分分离式 PID 控制器 在启动过程中,如果静态误差很大时,可以关闭积 分部分的作用,稳态误差很小时再开启积分作用, 消除静态误差
2020/6/10
东北大学信息学院
4
▪ 超前滞后校正器
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
5
6.1.2 超前滞后校正器的设计方法
▪ 基于剪切频率和相位裕度的设计方法
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
6
超前滞后校正器的设计规则:
▪ 阶跃响应近似
▪ Nyquist 图近似
▪ 编写 MATLAB 函数 getfolpd( ) , key=1
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
51
基于频域响应的近似方法
调用编写的 MATLAB 函数 getfolpd( ) , key=2
52
基于传递函数的辨识方法
2020/6/10
东北大学信息学院
30
【例6-6】
31
6.2.4 观测器设计及基于观测器的 调节器设计
32
33
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
34
【例6-7】
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
28
Ackermann 算法 其中 为将 代入 得出的矩阵多项式的值
鲁棒极点配置算法
place( ) 函数不适用于含有多重期望极点的问题 acker( ) 函数可以求解配置多重极点的问题
控制系统计算机辅助设计——MATLAB语言与应用
2020/6/10
东北大学信息学院
29
【例6-5】
控制系统计算机辅助设计——MATLAB语言与应用