多缸纯气动控制系统障碍信号消除原理分析
气动行程程序设计中几种消障方法的比较
气动行程程序设计中几种消障方法的比较杨妙;袁瑞仙;孙峰【摘要】气动行程程序设计是气压传动教学中的重要内容,其中如何消除障碍信号是教学中的重点和难点.现在主流的消障方法依然停留在采用脉冲信号和辅助阀上,随着新技术、新产品的出现,消障方法变得多样化.对比脉冲信号法、辅助阀法,以具体例子说明气动行程程序设计中出现Ⅰ型障碍采用串联法、气控延时阀以及气动节拍器进行消障的基本原理,并给出设计回路图.最后在总结各种消障方法优缺点的基础上提出消障方法的选择应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取.【期刊名称】《邢台职业技术学院学报》【年(卷),期】2018(035)001【总页数】5页(P88-92)【关键词】气压系统;障碍信号;串联法;气控延时阀;气动节拍器【作者】杨妙;袁瑞仙;孙峰【作者单位】长春汽车工业高等专科学校电气工程学院,吉林长春 130013;长春汽车工业高等专科学校电气工程学院,吉林长春 130013;长春汽车工业高等专科学校电气工程学院,吉林长春 130013【正文语种】中文【中图分类】TH138气压传动是以压缩气体为工作介质,靠气体的压力传递动力或信息的流体传动。
纯气动系统在设计过程中采用行程程序控制居多。
行程程序控制是指执行元件完成某一动作后,由行程开关发出相应信号,输入到逻辑控制回路中,由逻辑控制回路做出判断后再发出相应的执行信号,使执行元件执行下一步动作,当动作完成后,继续发出新的信号,直到完成预定的逻辑控制为止[1]。
设计行程程序控制回路必须注意信号之间是否存在干扰,有些信号使执行元件执行某一个动作,却阻碍了执行元件的下一个动作,这就形成了障碍,在回路中必须消除障碍,程序才能正常运行[2]。
目前,在程序设计中消除Ⅰ型障碍的方法主要有:脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器。
本文以一个实例为载体,说明采用以上5种方法消障的优缺点并进行总结。
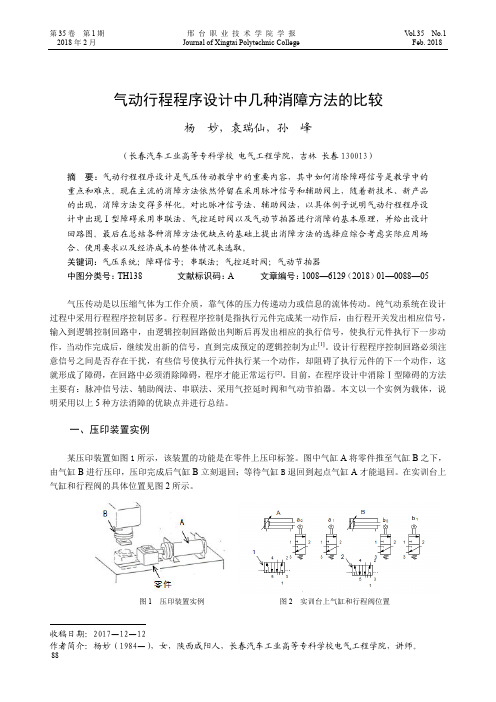
某压印装置如图1所示,该装置的功能是在零件上压印标签。
气动行程程序设计中几种消障方法的比较
第35卷 第1期 邢 台 职 业 技 术 学 院 学 报 V ol.35 No.1 2018年2月 Journal of Xingtai Polytechnic College Feb. 2018收稿日期:2017—12—12作者简介:杨妙(1984—),女,陕西咸阳人,长春汽车工业高等专科学校电气工程学院,讲师。
88气动行程程序设计中几种消障方法的比较杨 妙,袁瑞仙,孙 峰(长春汽车工业高等专科学校 电气工程学院,吉林 长春130013)摘 要:气动行程程序设计是气压传动教学中的重要内容,其中如何消除障碍信号是教学中的重点和难点。
现在主流的消障方法依然停留在采用脉冲信号和辅助阀上,随着新技术、新产品的出现,消障方法变得多样化。
对比脉冲信号法、辅助阀法,以具体例子说明气动行程程序设计中出现Ⅰ型障碍采用串联法、气控延时阀以及气动节拍器进行消障的基本原理,并给出设计回路图。
最后在总结各种消障方法优缺点的基础上提出消障方法的选择应综合考虑实际应用场合、使用要求以及经济成本的整体情况来选取。
关键词:气压系统;障碍信号;串联法;气控延时阀;气动节拍器中图分类号:TH138 文献标识码:A 文章编号:1008—6129(2018)01—0088—05气压传动是以压缩气体为工作介质,靠气体的压力传递动力或信息的流体传动。
纯气动系统在设计过程中采用行程程序控制居多。
行程程序控制是指执行元件完成某一动作后,由行程开关发出相应信号,输入到逻辑控制回路中,由逻辑控制回路做出判断后再发出相应的执行信号,使执行元件执行下一步动作,当动作完成后,继续发出新的信号,直到完成预定的逻辑控制为止[1]。
设计行程程序控制回路必须注意信号之间是否存在干扰,有些信号使执行元件执行某一个动作,却阻碍了执行元件的下一个动作,这就形成了障碍,在回路中必须消除障碍,程序才能正常运行[2]。
目前,在程序设计中消除Ⅰ型障碍的方法主要有:脉冲信号法、辅助阀法、串联法、采用气控延时阀和气动节拍器。
机械手气动程序气控系统干扰信号分析及处理
机械手气动程序气控系统干扰信号分析及处理袁小会1,蔡逸飞2,刘桂花1,付娟娟1,刘小宁1(武汉软件工程职业学院机械工程学院,武汉430205;2.通用电气(武汉)工程技术有限公司工程部,武汉430205)摘要:气动程序气控系统凭借良好的抗强磁性、抗强辐射性等优点,被广泛用于自动化生产线。
其可靠性直接影响自动化生产线的经济稳定运行。
干扰信号的分析及消除处理是复杂气动程序气控系统设计的关键,也是设计的难点。
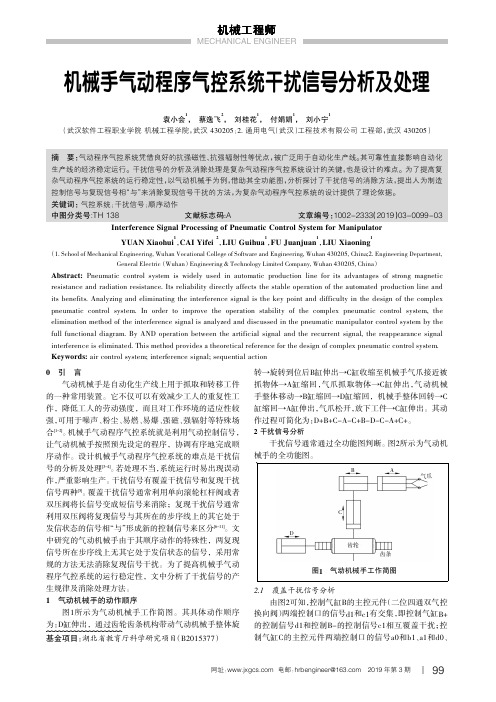
为了提高复杂气动程序气控系统的运行稳定性,以气动机械手为例,借助其全功能图,分析探讨了干扰信号的消除方法,提出人为制造控制信号与复现信号相“与”来消除复现信号干扰的方法,为复杂气动程序气控系统的设计提供了理论依据。
关键词:气控系统;干扰信号;顺序动作中图分类号:TH138文献标志码:粤文章编号:员园园圆原圆猿猿猿(圆园员9)03原园099原园3 Interference Signal Processing of Pneumatic Control System for ManipulatorYUAN Xiaohui1,CAI Yifei2,LIU Guihua1,FU Juanjuan1,LIU Xiaoning1(1.School of Mechanical Engineering,Wuhan Vocational College of Software and Engineering,Wuhan430205,China;2.Engineering Department, General Electric(Wuhan)Engineering&Technology Limited Company,Wuhan430205,China)Abstract:Pneumatic control system is widely used in automatic production line for its advantages of strong magnetic resistance and radiation resistance.Its reliability directly affects the stable operation of the automated production line and its benefits.Analyzing and eliminating the interference signal is the key point and difficulty in the design of the complex pneumatic control system.In order to improve the operation stability of the complex pneumatic control system,the elimination method of the interference signal is analyzed and discussed in the pneumatic manipulator control system by the full functional diagram.By AND operation between the artificial signal and the recurrent signal,the reappearance signal interference is eliminated.This method provides a theoretical reference for the design of complex pneumatic control system. Keywords:air control system;interference signal;sequential action0引言气动机械手是自动化生产线上用于抓取和转移工件的一种常用装置。
气动控制回路的原理是什么

气动控制回路的原理是什么气动控制回路是一种利用气体流体力学原理控制工程系统的闭环控制系统。
主要由气源、执行器、传感器、控制器和反馈信号组成。
其原理基于气体在管道中的流动特性和压力变化,通过改变气流的速度、压力、方向等参数,从而控制执行器的位置或动作。
首先,气动控制回路的气源提供压缩空气或气体供给系统。
气源通常由一台压缩机提供,通过压缩机将大气中的气体压缩至较高压力,然后通过管道输送至气动执行器。
气动执行器是气动控制回路的核心部分,用于完成各种机械运动任务。
它可以是气缸、气动电机、气动阀门等。
气缸是最常见的执行器,其内部通过压缩空气产生推力,从而实现物体的运动。
气动电机则是利用压缩空气带动转子实现旋转运动。
为了实现对气动执行器的精准控制,气动控制回路还需要添加传感器和控制器。
传感器可以测量气流的流量、压力或温度等参数,将其转换为电信号,并传送给控制器。
常见的传感器有流量计、压力传感器和温度传感器等。
控制器接收传感器的信号,与设定值进行比较,根据差异信号进行逻辑运算,并输出控制信号给执行器,从而实现对执行器的精确控制。
在气动控制回路中,反馈信号的作用至关重要。
反馈信号可以提供对执行器位置或动作状态的实时监测,从而实现自动调整和校正。
常见的反馈信号有位置传感器、编码器等。
控制器将反馈信号与设定值进行比较,并根据差异信号进行反馈控制,以达到控制目标。
除了以上组成部分外,气动控制回路还包括管道、连接件和阀门等。
管道负责气体的输送和传递,连接件用于连接不同部件,而阀门用于控制气体的流量和压力。
阀门可以是手动操作的,也可以是电动或气动驱动的,用于调节或切断气体流动。
总结而言,气动控制回路的原理是基于气体流体力学原理,在气源的供气作用下,通过控制器和传感器对执行器进行精确控制,实现对工程系统的闭环控制。
它具有结构简单、动作迅速、承载能力大、使用寿命长等优点,在工业自动化控制和生产线上得到广泛应用。
多缸动作回路的故障分析与排除

①行程开关方面:如因行程开关安装不牢靠、 因多次碰撞松动、行程开关本身的质量等原 因造成行程开关不能可靠地准确发讯,导致 不顺序动作,可查明原因予以排除; ②电路故障:如接线错误,电磁铁接线不牢 靠或断线,以及其它电器元件的故障等,造 成顺序动作紊乱或不顺序动作,查明原因予 以排除; ③活塞杆上撞块因磨损或松动不能可靠压下 行程开关,或撞块安装紧固位置不对,使行 程开关不能可靠与准确发讯,造成顺序动作 失常,可针对原因逐一排除。
(2)采用同步缸的同步回路(图4—42) )采用同步缸的同步回路( 这是用尺寸相同、共用一活塞杆的两个同步 缸1与缸2,向两个工作腔供给同流量的油, 与缸2 从而保证两工作油缸5与缸6 从而保证两工作油缸5与缸6运动同步的回路, 同步精度可达1 同步精度可达1%。 这种回路不同步(或同步精度差) 这种回路不同步(或同步精度差)的原因主要是: 同步缸的制造误差、工作油缸的制造误差和 系统泄漏、工作油缸行程太长及高压下负载 又不均匀时,会产生一个缸先行到底的不同 步现象。
①各个阀的调节压力不当或者在使用过程中 因某些原因而变化。 例如为了防止压力继电器在夹紧缸1 例如为了防止压力继电器在夹紧缸1未到达夹 紧行程终点之前就误发信号,压力继电器调 节压力应比夹紧缸的夹紧压力大0.3~0.5MPa; 节压力应比夹紧缸的夹紧压力大0.3~0.5MPa; 为了保证在工件没有可靠夹紧之前不出现缸2 为了保证在工件没有可靠夹紧之前不出现缸2 先进给的情况,减压阀5 先进给的情况,减压阀5的的调整压力比压力 继电器的调整压力高O.3~O.5MPa;溢流阀8 继电器的调整压力高O.3~O.5MPa;溢流阀8 的调整压力既要比阀5的调整压力高0.2~ 的调整压力既要比阀5的调整压力高0.2~ O.3MPa,又要比缸2的最大工作压力大O.3~ O.3MPa,又要比缸2的最大工作压力大O.3~ 0.4MPa,要采用失压发讯。 0.4MPa,要采用失压发讯。
燃气清码obd的工作原理

燃气清码obd的工作原理
燃气清码OBD(On-Board Diagnostics)是一种车辆故障诊断系统,用于检测和报告车辆发动机和其他主要组件的故障信息。
它的工作原理如下:
1. 监控传感器和执行器:OBD系统连接到车辆的发动机控制单元(ECU),监测发动机的各种传感器和执行器的工作情况,例如氧气传感器、节气门位置传感器、冷却液温度传感器等。
2. 故障码检测:OBD系统会定期检查车辆的传感器和执行器的工作状态,如果发现任何异常或故障,会生成一个故障码。
故障码是一种数字代码,表示特定的故障类型或系统问题。
例如,P0300代码表示发动机多缸间随机失火。
3. 故障码存储和报告:一旦生成故障码,OBD系统会将其存储在ECU的内部存储器中。
同时,故障码也会通过OBD接口传输到连接的外部设备上,如汽车修理工的扫描工具或车辆所有者的OBD读码器。
这样,车辆的故障信息可以被轻松读取和分析。
4. 包括实时数据的额外信息:除故障码外,OBD系统还可以传输一些实时数据给外部设备,例如发动机转速、车速、进气温度等。
这些数据可以帮助技师或车主更好地理解车辆的性能和运行状况。
总之,燃气清码OBD通过监测车辆传感器和执行器的工作状态,检测并报告故
障信息,以提供车辆诊断和维修的便利性。
气动系统常见故障解决方法
气动系统常见故障解决方法1.气动执行元件(气缸)故障由于气缸装配不当和长期使用,气动执行元件(气缸)易发生内、外泄漏,输出力不足和动作不平稳,缓冲效果不良,活塞杆和缸盖损坏等故障现象。
(1)气缸出现内、外泄漏,一般是因活塞杆安装偏心,润滑油供应不足,密封圈和密封环磨损或损坏,气缸内有杂质及活塞杆有伤痕等造成的。
所以,当气缸出现内、外泄漏时,应重新调整活塞杆的中心,以保证活塞杆与缸筒的同轴度;须经常检查油雾器工作是否可靠,以保证执行元件润滑良好;当密封圈和密封环出现磨损或损环时,须及时更换;若气缸内存在杂质,应及时清除;活塞杆上有伤痕时,应换新。
(2)气缸的输出力不足和动作不平稳,一般是因活塞或活塞杆被卡住、润滑不良、供气量不足,或缸内有冷凝水和杂质等原因造成的。
对此,应调整活塞杆的中心;检查油雾器的工作是否可靠;供气管路是否被堵塞。
当气缸内存有冷凝水和杂质时,应及时清除。
(3)气缸的缓冲效果不良,一般是因缓冲密封圈磨损或调节螺钉损坏所致。
此时,应更换密封圈和调节螺钉。
(4)气缸的活塞杆和缸盖损坏,一般是因活塞杆安装偏心或缓冲机构不起作用而造成的。
对此,应调整活塞杆的中心位置;更换缓冲密封圈或调节螺钉。
2.换向阀故障换向阀的故障有:阀不能换向或换向动作缓慢,气体泄漏,电磁先导阀有故障等。
(1)换向阀不能换向或换向动作缓慢,一般是因润滑不良、弹簧被卡住或损坏、油污或杂质卡住滑动部分等原因引起的。
对此,应先检查油雾器的工作是否正常;润滑油的粘度是否合适。
必要时,应更换润滑油,清洗换向阀的滑动部分,或更换弹簧和换向阀。
(2)换向阀经长时间使用后易出现阀芯密封圈磨损、阀杆和阀座损伤的现象,导致阀内气体泄漏,阀的动作缓慢或不能正常换向等故障。
此时,应更换密封圈、阀杆和阀座,或将换向阀换新。
(3)若电磁先导阀的进、排气孔被油泥等杂物堵塞,封闭不严,活动铁芯被卡死,电路有故障等,均可导致换向阀不能正常换向。
对前3种情况应清洗先导阀及活动铁芯上的油泥和杂质。
多位气缸原理

多位气缸原理
多位气缸是指在同一工作行程内,多个气缸同时工作以提高工作效率的一种气动传动装置。
多位气缸的原理是通过合理的气路设计和控制方式,使多个气缸在同一时间内分别完成各自的工作,从而实现整个系统的协调运动。
首先,多位气缸的工作原理是基于气体压力传递的。
在气动系统中,气源通过气路传递给多个气缸,通过控制气源的开关,可以使气缸按照设计好的顺序和时间完成各自的工作。
这种方式可以有效地提高工作效率,节约能源。
其次,多位气缸的原理还包括气缸的同步运动和协调控制。
在多位气缸系统中,气缸之间需要进行同步运动,以确保整个系统的稳定性和准确性。
通过合理的气路设计和控制方式,可以实现多个气缸的同步运动,从而提高系统的工作精度和效率。
另外,多位气缸还可以通过合理的气路设计和控制方式实现不同工作状态下的切换。
在实际工程中,多位气缸系统通常需要在不同的工作状态下进行切换,例如正转、反转、停止等。
通过合理的气路设计和控制方式,可以实现多位气缸在不同工作状态下的快速
切换,从而满足不同工况下的工作需求。
总之,多位气缸的原理是通过合理的气路设计和控制方式,使多个气缸在同一时间内分别完成各自的工作,从而提高整个系统的工作效率和精度。
多位气缸系统在自动化生产线、机械加工等领域有着广泛的应用,对于提高生产效率和质量具有重要意义。
气动系统的故障诊断与排除2气动系统的故障及维修

教学内容
一、气动系统维护的要点
1.保证供给洁净的压缩空气。 2.保证空气中含有适量的润滑油。 3.保持气动系统的密封性。 4.保证气动元件中运动零件的灵敏性。 5.保证气动装置具有合适的工作压力和运动速度。
二、气动系统的点检与定检
1.管路系统点检 管路系统点检主要内容是对冷凝水和润滑油的管理。
2.气动元件的定Βιβλιοθήκη 如表5-12所示。案例2:松刀动作缓慢的故障诊断与维修。 故障现象:HT6350卧式加工中心换刀时, 主轴松刀动作缓慢。 分析及处理过程:根据图的气动控制原理 图进行分析,主轴松刀动作缓慢的原因有:① 气动系统压力太低或流量不足;②机床主轴拉刀 系统有故障,如碟型弹簧破损等;③ 主轴松刀 气缸有故障。根据分析,首先检查气动系统的压 力,压力表显示气压为0.5MPa,压力正常;将 机床操作转为手动,手动控制主轴松刀,发现系 统压力下降明显,气缸的活塞杆缓慢伸出,故判 定气缸内部漏气。拆下气缸,打开端盖,压出活 塞和活塞环,发现密封环破损,气缸内壁拉毛。 更换新的气缸后,故障排除。
5.4 液压、气动系统的故障诊断与排除
5.4.2 气动系统的故障及维修
学习目标
知识目标——1.了解气压系统维护的要点;
2.了解气动系统的点检与定检; 3.掌握液压系统的故障诊断与排除
技能目标——掌握气动系统常见故障及排除
情感目标——养成善于观察、独立思考的良好习惯。
重点与难点
学习重点:气动系统常见故障及排除
学习难点:气动系统常见故障及排除
引入策略
在气动系统中,由于客观上气动元器件,辅件 质量不稳定和主观上使用,维护不当,且系统中 各元件和工作介质都是在封闭管路内工作,不像 机械设备那样直观,也不像电气设备那样可利用 各种检测仪器方便地测量各种参数,仅靠有限的 几个压力表、流量计等来指示系统某些部位的工 作参数,其他参数难以测量,而且一般故障根源 有许多可能,这些给气动系统故障诊断带来一定 困难。
障碍信号的排除方法
障碍信号的排除方法
1.脉冲信号排障法
采用机械活络挡块或单向滚轮杠杆式机控阀,使得气缸在一次往复动作 中只发出怡一个脉冲信号,把存在障碍的长信号缩短为脉冲信号。
机 械 法
这种方法排除障碍信号结构简单,但靠它发信的定位精度较低,需要 设置固定挡块来定位,特别是气缸行程较短时不宜采用。
脉 冲 回 路 法
可能导致程序误动作。
脉冲阀
延时阀 主控阀
用来避免在接通气源或系统启动瞬间脉冲阀3产生的脉冲信号引起 的程序误动作。
在气控回路中加入启动保护回路的原则是: (1)脉冲阀和初始状态为零位的机控阀(产生原始信号)相连; (2)脉冲阀的输出作为主控阀的置“1”信号; 否则,气控回路中不必加入启动保护回路。
假如在加入信号a的前一时刻,将发出障碍信号e的行程阀气源切断,于 是信号a就能使阀换向。
分组规则
1.程序分组时,每个气缸的动作在每组中仅出现一次,以保证任何一 个主控阀两侧的原始信号不在同一组。
2. 应尽可能使分组数目最少,以得到最少元件的供气回路。分组时, 首先在程序相邻的两个相同字母中间分组,然后再向前或向后划分程序 的其余部分,并使每一组尽可能地包含更多的气缸。
画出半自动程序A1A0B1B0C1C0气控回路
在半自动程序的最后动作的气缸可以不装行程阀,在本例中没有行程阀 c0。它的每次动作都要按一下启动按钮,程序才开始动作,直到程序结 束。
画出程序A1B1C0B0A0C1的逻辑控制原理图。
分组供气法设计程序控制回路
分组供气原理
在主控阀一侧加入信号a使其换向时,若同时在阀的另—侧已有信号e存 在,使阀的换向动作受阻,即存在障碍,信号e是障碍信号。
c1*(C0) =c1
c0*(A0) =Δc0
气动钻床控制回路中障碍信号的判别与消除
气动钻床控制回路中障碍信号的判别与消除1 引言气动钻床的行程控制回路由3个气缸组成,即送料缸A,夹紧缸B,钻削缸C。
其工作程序为:启动―→送料―→夹紧―→送料后退/钻孔―→钻头后退―→松开。
在对这一多气缸行程控制回路进行设计时,如何判别障碍信号并设法消除它是设计中必须首先解决的问题。
本文针对这一问题,就目前常用的判别方法和消除方法进行了阐述。
2 障碍信号与分类在多气缸行程控制回路中,所谓障碍信号是指同一时刻,主控阀的两端控制口同时存在作用相反的控制信号,妨碍主控阀按规定程序换向。
按一个工作程序中的气缸的往返次数,可以将妨碍信号分为Ⅰ型障碍信号和Ⅱ型障碍信号。
存在于单往复程序中,同时作用于某个主控阀的两个控制口上两个相互矛盾的输入信号,称为Ⅰ型障碍信号。
在多缸多往复程序中,多次出现在不同节拍分别作用不同的控制阀、控制口引起障碍,或者作用于同一控制口,引起障碍,这种信号称为Ⅱ型障碍信号。
在多缸多往复程序中,既可能存在Ⅰ型障碍信号,也可能存在Ⅱ型障碍信号。
3 程序线图法判别障碍信号以气动钻床的传动系统为例:工作程序简写为:A1→B1→A0/C1→C0→B0,下标0表示气缸返回初始位置,下标1表示气缸伸出到预定位置。
程序控制线图的画法是先画出气缸动作状态线,再画主控阀的输出信号线,然后画行程阀的信号线。
由此程序线图找出主控阀两端控制信号,于是便可给出合理的程序控制线路图。
主控阀的信号线的画法与X-D线图的画法相同。
程序控制线图中的纵向为程序界限线。
障碍的判断根据同一信号控制气缸的动作是否矛盾。
图1在图1中可以看出,在界线3上和界线5上,b1和c0都处于接通状态。
由b1控制C 缸的伸出,在C缸要返回到初始位置(界线5),此时b1还处于接通状态。
也就是b1同时控制C缸伸出和返回两种状态,所以,b1是障碍信号。
相同原理,由c0发出信号,控制B缸返回(界线5),在界线2――3之间,B缸要伸出,此时,c0还处于导通状态。
气动系统常见故障分析与系统维护方法

气动系统常见故障分析与系统维护方法1、气动系统常见故障类型(1)机理性故障①元件加工、装配不良如元件内孔的研磨不符合要求,零件毛刺未清除干净,安装不清洁,零件装错、装反,装配时对中不良,紧固螺钉拧紧力矩不恰当,零件材质不符合要求,外购零件(如密封圈、弹簧)质量差等。
②设计失误设计元件时,对零件的材料选用不当,加工工艺要求不合理,对元件的特点、性能和功能了解不够,造成设计回路时元件选用不当;设计的空气处理系统不能满足气动元件和系统的要求,回路设计出现错误。
③安装不符合要求安装时,元件及管道内吹洗不干净,使灰尘、密封材料碎片等杂质混入,造成气动系统故障;安装气缸时存在偏载;没有采取有效的管道防松、防振动措施。
④维护管理不善如未及时排放冷凝水、未及时给油雾器补油等。
(2)突发故障系统在稳定运行时期内突然发生的故障称为突发故障。
例如油杯和水杯都是用聚碳酸酯材料制成的,它们在有机溶剂的雾气中工作,就有可能突然破裂;空气或管路中残留的杂质混入元件内部,突然使相对运动件卡死;弹簧突然折断、软管突然爆裂、电磁线圈突然烧毁;突然停电造成回路误动作等。
有些突发故障是有先兆的,如排出的空气中出现杂质和水分,表明过滤器已失效,应及时查明原因并予以排除,以免酿成突发故障。
但有些突发故障是无法预测的,只能采取安全保护措施加以防范,或准备一些易损件的备件,以备及时更换失效的元件。
(3)老化故障个别或少数元件达到使用寿命后发生的故障称为老化故障。
参照系统中各元件的生产日期、开始使用日期、使用的频繁程度以及已经出现的某些征兆,如声音反常、泄漏越来越严重、气缸运动不平稳等现象,大致预测老化故障的发生期限是有可能的。
2、气动系统维护的方法(1)保证供给洁净的压缩空气压缩空气中通常都含有水分、油分和粉尘等杂质。
水分会使管道、阀和气缸腐蚀;油分会使橡胶、塑料和密封材料变质;粉尘造成阀体动作失灵。
选用合适的过滤器,可以清除压缩空气中的杂质。
纯气动多气缸控制回路设计

纯气动多气缸控制回路设计随着自动化技术的发展,气动系统在工业领域中得到了广泛的应用。
纯气动多气缸控制回路设计是其中的一个重要内容,它能够实现多个气缸的协调工作,提高生产效率和质量。
其次是气缸部分的设计。
气缸是纯气动多气缸控制回路中最重要的执行元件。
在气缸部分的设计中,需要考虑气缸的类型、规格和数量。
常见的气缸有单作用气缸和双作用气缸等。
根据实际应用需求,选择适当的气缸类型和规格。
在多气缸控制中,需要考虑气缸的协调工作,避免气缸之间的干扰和冲突。
控制部分是纯气动多气缸控制回路设计中的核心部分。
在控制部分的设计中,需要考虑控制信号的传输、处理和转换。
常见的控制信号有电磁信号、气动信号和传感器信号等。
根据不同的应用需求,选择适当的控制元件,如电磁阀、压力传感器、位置传感器等。
此外,还需要设计合理的控制逻辑和策略,实现多气缸的协调工作和过程控制。
安全部分是纯气动多气缸控制回路设计中的重要组成部分。
在安全部分的设计中,需要考虑系统的故障检测和应急措施。
常见的安全措施有过载保护、应急停机和安全门等。
通过合理设计和配置安全元件,能够保证系统的安全运行和人员的安全。
在纯气动多气缸控制回路设计中,还需要注意以下几个方面:一是系统的电气与气动接口设计,保证控制信号的可靠传输和处理;二是系统的节能设计,减少能源的消耗和环境的污染;三是系统的维护和管理,定期检查和保养设备,及时处理故障和异常情况。
总之,纯气动多气缸控制回路设计是一个复杂的工程问题,需要综合考虑气源、气缸、控制和安全等方面的要求。
只有合理设计和配置各个部分,才能够实现多气缸的协调工作,提高生产效率和质量。
浅议气动行程程序的障碍判别及障碍消除方法
浅议气动行程程序的障碍判别及障碍消除方法
张安全
【期刊名称】《科技创新导报》
【年(卷),期】2009(000)024
【摘要】气动行程程序是根据生产动作的要求,用英文大写字母表示的多气缸往复运动程序,程序的运行由行程发信器控制,行程发信器发出的信号输入到系统的逻辑控制回路,通过逻辑运算来指挥气缸的动作,直到完成预定的程序控制为止.实际上,这是一种广泛应用于生产实际的闭环控制系统.掌握行程程序控制系统的设计方法,正确判列气动行程程序控制幕统中的障碍并消除障碍,有利于推动气动技术的应用.【总页数】2页(P74-75)
【作者】张安全
【作者单位】湖北轻工职业技术学院,湖北武汉,430070
【正文语种】中文
【中图分类】TP271.32
【相关文献】
1.一种用于判别气动行程程序障碍信号的方法 [J], 刘朋
2.利用PLC消除气动行程程序控制回路的障碍信号 [J], 唐德栋;孔祥冰;舒庆
3.仪表飞行程序设计障碍物自动筛选方法研究 [J], 周泽友
4.PBN飞行程序设计中障碍物评价辅助软件的开发研究 [J], 朱代武;王冬冬;杨姝;钟建华
5.仪表飞行程序设计障碍物自动筛选方法研究 [J], 周泽友
因版权原因,仅展示原文概要,查看原文内容请购买。
气动控制系统原理

气动控制系统原理
气动控制系统是利用气体的力和压力来控制机械运动的一种控制系统。
其基本原理是通过控制气源的输出压力、气缸和执行器的运动来实现机械系统的控制。
气源部分是气动控制系统的核心部件,它一般由压缩空气源、气缸、执行器和气路组成。
压缩空气源产生高压力空气,在气缸和执行器之间传输。
气缸是气动控制系统的执行机构,它能够将气源提供的压缩空气转化为机械运动。
执行器根据气缸的运动状态,通过动力传递装置将运动传递给被控制对象。
气动控制系统中常用的控制元件有气动阀和调节阀。
气动阀通过控制气路的开关,实现对气源输出压力的控制。
调节阀则用于调节气源输出压力的大小,以控制气缸和执行器的运动速度和力度。
控制元件的选择与设计是气动控制系统的重要步骤,需要根据被控对象的特点、运动要求和系统的稳定性进行合理的选择和配置。
气动控制系统的工作过程中,通过控制气源输出压力的大小和气缸的移动速度,可以实现机械系统的连续、往复运动,以及位置和力的控制。
系统的控制过程一般分为三个阶段:信号采集、信号处理和执行控制。
信号采集是通过传感器将被控对象的状态转化为控制信号,信号处理则是对采集到的信号进行滤波、放大、比较处理等,生成相应的控制信号。
执行控制是根据处理后的信号,通过控制气源、气缸和执行器的运动,实现机械系统的控制和调节。
总之,气动控制系统是利用压缩空气来控制机械系统运动的一种控制系统。
它通过控制气源输出压力、气缸和执行器的运动来实现机械系统的运动控制,具有简单、快速、稳定等特点,在工业自动化领域得到广泛应用。
气动系统主要元件常见故障及排除方法

气动系统设计不合 理:气动系统设计 不合理,导致气动 元件无法正常工作
故障检测方法
01
压力表检测:观察压力表的读 数,判断气动系统的压力是否 正常
03
温度计检测:观察温度计的读 数,判断气动系统的温度是否 正常
05
振动检测:通过感受气动系统 的振动,判断气动系统的运行 是否正常
02
流量计检测:观察流量计的读 数,判断气动系统的流量是否 正常
演讲人
目录
01. 气动系统元件介绍 02. 常见故障排除方法 03. 故障排除案例分析 04. 故障排除注意事项
气动元件分类
气源处理元件:包括空气压缩机、过滤器、 调压阀等,用于提供洁净、稳定的压缩空气。
执行元件:包括气缸、气动马达、气动马达 等,用于实现气动系统的运动控制。
控制元件:包括电磁阀、气动阀、气动开关 等,用于控制气动系统的压力、流量和方向。
故障排除技巧
● 检查气动系统的压力是否正常 ● 检查气动元件的连接是否正确 ● 检查气动元件的磨损情况 ● 检查气动系统的泄漏情况 ● 检查气动系统的清洁度 ● 检查气动系统的润滑情况 ● 检查气动系统的温度是否正常 ● 检查气动系统的噪声情况 ● 检查气动系统的振动情况 ● 检查气动系统的响应速度 ● 检查气动系统的精度
故障排除顺序
01
检查气动系 统的压力是
否正常
02
检查气动系 统的流量是
否正常
03
检查气动系 统的泄漏情
况
04
检查气动系 统的元件是
否损坏
05
检查气动系 统的电气控 制是否正常
06
检查气动系 统的机械结 构是否正常
07
检查气动系 统的工作环 境是否正常
多气缸顺序回路信号障碍消除及程序控制系统设计
多气缸顺序回路信号障碍消除及程序控制系统设计
林荣川;魏莎莎
【期刊名称】《包装与食品机械》
【年(卷),期】2009(027)002
【摘要】多缸单往复行程程序控制回路的设计关键之一障碍信号的排除,在气缸数少的回路中.用信号-动作状态图法较好解决制约信号、中间记忆元件的控制信号的选择问题,简单而且直观;在多气缸回路中,用串级法设计的气动回路控制准确,不易出错.
【总页数】4页(P24-26,34)
【作者】林荣川;魏莎莎
【作者单位】集美大学工程技术学院,福建,厦门,361012;集美大学工程技术学院,福建,厦门,361012
【正文语种】中文
【中图分类】TH138.9
【相关文献】
1.气动逻辑元件在多气缸顺序动作气压控制回路中的应用 [J], 朱光力
2.利用PLC消除气动行程程序控制回路的障碍信号 [J], 唐德栋;孔祥冰;舒庆
3.多气缸顺序动作电气控制回路设计 [J], 朱光力
4.设计多气缸顺序动作控制回路的最可靠、最直观的方法--"最多级数法" [J], 朱光力
5.基于产教融合理念的中职专业课程教学设计和实践——以“双气缸顺序动作回路的组建与调试”为例 [J], 吴秋琴
因版权原因,仅展示原文概要,查看原文内容请购买。
全气动多缸行程程序控制系统的快速设计
各气 口的功能说 明 :
析是否存在 障碍信号 ,常用 的方法有很多 ,如信号动
作状 态图法 、卡诺Leabharlann 图图解法等 ,这些方法较繁琐且易
出 。
P :气源进气 口。当多 个模块 组合 使用 时 ,各 模 块 P口应相通连接 ; A:气控信 号输 出 口。当多 个模 块组 合 使用 时 , 各模块 的 A 口分别输 出气控 信号 ; x:气控信 号输 入 口。当多 个模 块组 合 使用 时 , 各模块 的 x 口分别接 受来 自外部 的控制气 体 ; L :总复位控 制 口,当 L口与气 源接 通时 ,节拍 器恢复为初始状态 ,程序执行完本步动作后停止 ; z n :转 换条件 信 号输 出 口;控制 其 前 级步 成为
Ke y w o r d s :Wh o l e p n e u m a t i c ; Mu l t i — c y l i n d e r s t r o k e ; C o n r t o l s y s t e m; Q u i c k d e s i n g
多气缸顺序动作气压控制 回路设计时 ,首先应分
H a r b i n H e i l o n g j i a n g 1 5 0 0 8 0, C h i n a )
Ab s t r a c t : Ai mi n g a t s o me q u e s t i o n s o f c o mp l e x l o c r e l a t i o n i n t h e mu l t i — c y l i n d e r s t r o k e p r o g r a m c o n t r o l s y s t e m a n d f u s s y d e s i g n a t e l i mi n a t i o n o f t h e c o n t r o l o b s t a c l e s i na g l , a me t h o d o f q u i c k d e s i g n o f p n e u ma t i c c i r c u i t b y u s i n g n e w t y p e o f a u t o ma t i c c o n t r o l p n e u —
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多缸纯气动控制系统障碍信号消除原理分析周钦河【摘要】Obstacle signal always exists in multi-cylinder sequential action pure pneumatic system. There were several shortcomings in time-delay valve pulse obstacle signal elimination method, such as poor pulse width applicability and time inaccuracy. Based on the analysis of obstacle signal elimination principle for multi-cylinder pure pneumatic control system, this paper presented a obstacle signal elimination method based on step control for pneumatic control system. Its internal structure was designed and applied to the multi-cylinder pure pneumatic control system. By using FluidSIM software, obstacle signal elimination method was simulated respectively based on step pulse method and delay-time pulse method. The results show that obstacle signal can be directly eliminated only by replacing common stroke valve with pneumatic stepping pulse stroke valve, without complex analysis or increasing memory elements, and it is suitable for pneumatic systems with different strokes and movement speeds. With this method, it is simple and fast to intuitively eliminate the obstacle signal with features such as simple structure and low cost, which simplifies the design of multi-cylinder pure pneumatic control system.%多缸顺序动作纯气动系统常常存在障碍信号,针对目前延时阀脉冲消障法存在的脉冲宽度难以调节、时间精度较差等不足,本文分析多缸纯气动控制系统障碍信号消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,并设计其内部结构,应用于多缸纯气动控制系统.通过FluidSIM软件,分别对采用步进脉冲法和延时脉冲法消除障碍信号进行仿真,仿真结果表明:只需采用气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析或增加记忆元件,且适用于不同行程与运动速度的气动系统.采用该方法进行障碍信号消除快捷、直观、结构简单且成本较低,简化多缸纯气动控制系统设计.【期刊名称】《中国测试》【年(卷),期】2017(043)005【总页数】5页(P115-119)【关键词】纯气动系统;障碍信号;消除原理【作者】周钦河【作者单位】广东水利电力职业技术学院机械工程系,广东广州 510925【正文语种】中文多缸纯气动控制系统因具有防火、防爆、防潮能力,广泛应用于环境恶劣的场合[1-2]。
在多缸顺序动作纯气动系统中,气缸动作的滞后特性强,与驱动信号不同步[3]。
在气缸切换动作时,若主控阀两端同时存在驱动信号,将导致换向阀无法换向,因此该障碍信号必须消除。
消除障碍信号常用方法有试凑法、脉冲信号法、串级法与信号-动作图法等,其中试凑法利用经验尝试不同的信号来消障,调试时间较长,适合于简单回路[4-5];脉冲信号法通常采用延时阀将障碍信号变成脉冲信号,原理简单,但需要增加硬件成本[6-7];串级法分级独立供气隔离主控阀两端驱动信号,若级数较多,则记忆元件与输出管路呈指数增长[8];信号-动作图法通过绘制信号、动作线图精确定位障碍信号,结合与门互锁消除障碍信号,适用于复杂系统设计,但设计周期较长[9-10]。
本文分析了多缸纯气动控制系统障碍信号的消除机理,结合行程阀与脉冲阀,将障碍信号变成脉冲信号,利用步进控制思路提出气动步进脉冲行程阀机理,该方法直观、快捷、成本低,实现纯气动控制系统快速设计。
障碍信号在回路中具体表现为换向阀两端同时存在驱动信号,若先到信号影响后到信号,使换向阀无法换向,先到信号即为障碍信号[11]。
图1为某纯气动控制系统及其信号-动作图。
如图1(a)所示,当气缸执行伸出动作B1到b1时,此时虽然行程阀b1有信号到主换向阀右位,但左位先到的a1信号未消失,使得换向阀两端同时存在信号,无法实现下一动作B0,a1为障碍信号。
图1(b)为该控制系统的信号-动作图,障碍信号表现为同组中信号线比动作线长,长的部分为障碍段。
可以采用缩短障碍信号的存在时间,去掉障碍段以消除障碍信号,使其变为无障碍的执行信号去控制主换向阀。
消除障碍后的执行信号必须满足两个条件:1)起点不能变,否则无法准确驱动同组动作;2)执行信号线不能长于所控制的动作线。
脉冲信号消障法是在产生障碍信号的行程阀回路中串联常通型延时阀,延时断开障碍信号,将其变成脉冲信号。
如图2所示,延时阀在b1信号到来之前将a1信号断开,保证主换向阀顺利换向。
采用该方法消除障碍信号,其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差,难以满足现代工业控制中高精度的要求,因此,有必要开发结构简单、运行可靠、控制精准的脉冲行程阀。
图3为气动步进脉冲阀机理与障碍信号消除原理图。
气动步进脉冲障碍信号消除原理如图3(a)所示,由一个行程阀与一个气动阀串联组成,进气口P接气源,行程阀被压下则产生原始驱动信号S1,即图3(b)中的信号①;气动阀导通控制口K1接上一步动作的执行信号,截止控制口K2接下一步动作的执行信号,即图3(b)中的信号②;两个阀串联后输出最终的执行信号S2,即图3(b)中的信气动步进脉冲障碍信号消除原理如图3(b)所示,信号③由信号①和信号②相与而来,这样保证信号③不会长于其驱动的动作线,障碍信号消除。
根据图3(a),可以设计如图4所示的气动步进脉冲行程阀[12]。
该步进脉冲行程阀由阀体1、滑阀芯2、行程杆3、弹簧4、球阀芯5和弹簧6组成,包括进气口P、导通控制口K1、截止控制口K2、行程阀正常出气口S1、步进脉冲出气口S2以及排气口O。
根据图3(b),该气动步进脉冲行程阀消除障碍信号的工作机理为:1)滑阀芯2可以在阀体1中滑动,其左右两个端面分别对应导通控制口K1、截止控制口K2,由导通控制口K1、截止控制口K2的输入信号控制滑阀芯2处于右位或左位两个位置:①当滑阀芯2处于右位时,步进脉冲出气口S2与行程阀正常出气口S1之间截止;②当滑阀芯2处于左位时,步进脉冲出气口S2与行程阀正常出气口S1之间导通。
2)行程杆3在外力作用下可以被按下,外力撤去后在弹簧4的作用下可以复位:①行程杆3在原位时,球阀芯5在弹簧6作用下封住阀口,使进气口P与行程阀正常出气口S1之间截止;②当行程杆3被按下时,行程杆3进一步按压球阀芯5,封住的阀口被打开,使进气口P与行程阀正常出气口S1之间导通。
3)当上一步动作开始时,导通控制口K1有信号输入,步进脉冲出气口S2与行程阀正常出气口S1之间导通,行程阀处于准备状态。
当上一步动作完成时,压下行程杆3,行程阀导通,步进脉冲出气口S2、行程阀正常出气口S1均有输出,其中步进脉冲出气口S2作为执行信号控制该步动作,行程阀正常出气口S1可以输出控制上一步执行信号结束。
当该步动作完成时,截止控制口K2有信号输入,行程阀截止,该步执行信号结束,从而精确消除主控换向阀一端的障碍信号,使其能够顺利切换位置。
该行程阀结构简单,使用方便,能够精准消除障碍信号,实现精确图5是该障碍信号消除方法在钻床气动控制回路中的具体应用实例,其气缸工作流程为“A1B1B0A0”。
行程阀正常出气口S1无外接气管时,可将该口堵塞。
通过FluidSIM软件仿真,图6为该系统的气缸动作状态图,可以看出,动作迅速,系统运行正常。
用该气动步进脉冲行程阀代替普通行程阀,即可直接消除障碍信号,无需进行复杂分析和增加记忆元件,结构简单。
如果将气动步进脉冲行程阀换成延时阀与行程阀组合(如图2所示),则延时阀开口的调节对气缸动作周期影响较大,如图7所示。
其脉冲宽度需要根据不同气缸的行程与运动速度进行调节,时间精度较差。
本文分析了多缸纯气动控制系统障碍信号的消除原理,利用步进控制思路,提出一种基于步进脉冲的气动控制系统障碍信号消除方法,利用上一步动作与下一步动作的执行信号来控制当前信号的导通与截止,保证该信号线长度一定不会超过其驱动的动作线,从而消除障碍信号;设计一种新的气动步进脉冲行程阀并应用于钻床多缸气动系统。
该障碍信号的消除原理可以精准消除主控换向阀一端的障碍信号,简化了多缸纯气动控制系统设计。
【相关文献】[1]SUCHSLAND J,WINTER T,GREISER A,et al.Extending laboratory automation to the wards:effect of an innovative pneumatic tube system on diagnostic samples and transport time[J].Clinical Chemistry and Laboratory Medicine,2017,55(2):225-230. [2]张俊鑫,范伟军,王学影,等.双通道气液压力机的设计研制[J].中国测试,2016,42(4):75-80.[3]TANG L,WANG J D.Estimation of the most critical parameter for the two-movement method to compensate for oscillations caused by control valve stiction[J].IEEE Transactions on Control Systems Technology,2016,24(5):1869-1874.[4]张建成,毛智勇,刘建.阀控不对称液压缸系统改进控制策略研究[J].现代制造工程,2015(5):120-125.[5]屈圭,吴晓丹,曾豪华.煤矿用机械手全气动控制系统设计[J].液压与气动,2009(8):27-31.[6]林荣川,魏莎莎.多气缸顺序回路信号障碍消除及程序控制系统设计[J].包装与食品机械,2009,27(2):24-26.[7]马晓明.基于X_D线图的多缸多往复气动回路设计[J].制造技术与机床,2011(5):75-78.[8]叶金玲,周钦河,赖乙宗.自动化生产线机械手全气动控制系统设计[J].制造技术与机床,2014(4):79-82.[9]刘婷婷,关波.比例阀测试系统的设计与实现[J].中国测试,2014,40(2):86-89.[10]LI J X,ZHAO S D.Optimization of valve opening process for the suppression of impulse exhaust noise[J]. Journal of Sound and Vibration,2017(389):24-40.[11]周钦河,叶金玲.液压与气动技术[M].安徽:合肥工业大学出版社,2012.[12]周钦河.一种气动步进脉冲行程阀:CN105221511A[P]. 2016-01-06.。