halcon圆柱角点展平案例
halcon圆柱角点展平案例
halcon圆柱角点展平案例Halcon圆柱角点展平是一种常用的图像处理技术,用于将圆柱形状的物体的角点展平以便于后续处理。
下面是关于Halcon圆柱角点展平的一些案例。
1. 圆柱表面上的角点检测:Halcon可以使用边缘检测和角点检测算法来检测圆柱表面上的角点。
通过对图像进行边缘检测,可以得到圆柱的边缘信息,然后使用角点检测算法来检测圆柱表面上的角点。
2. 圆柱角点的定位:在得到圆柱表面上的角点后,Halcon可以使用图像处理算法来定位这些角点的位置。
通过对图像进行角点定位,可以得到角点的坐标信息,从而可以对圆柱进行进一步处理。
3. 圆柱角点的展平:Halcon可以使用圆柱角点展平算法将圆柱表面上的角点展平。
通过将圆柱表面上的角点进行展平处理,可以使得角点的位置更加准确,从而可以提高后续处理的精度。
4. 圆柱角点的特征提取:在展平圆柱角点后,Halcon可以使用特征提取算法来提取圆柱角点的特征。
通过对展平后的角点进行特征提取,可以得到角点的形状、大小等特征信息,从而可以对圆柱进行更加精细的处理。
5. 圆柱角点的匹配:在提取圆柱角点的特征后,Halcon可以使用特征匹配算法来匹配不同圆柱角点之间的关系。
通过对不同圆柱角点之间的特征进行匹配,可以得到圆柱的整体形状和位置信息,从而可以进行更加准确的定位和识别。
6. 圆柱角点的测量:在匹配圆柱角点后,Halcon可以使用测量算法来测量圆柱的各个参数。
通过对圆柱角点之间的距离、角度等进行测量,可以得到圆柱的直径、高度等参数信息,从而可以对圆柱进行更加精确的测量。
7. 圆柱角点的校正:在测量圆柱的参数后,Halcon可以使用校正算法来校正圆柱的形状。
通过对圆柱的角点进行校正处理,可以使得圆柱的形状更加准确,从而可以提高后续处理的精度。
8. 圆柱角点的分类:在校正圆柱的形状后,Halcon可以使用分类算法来对圆柱角点进行分类。
通过对圆柱角点的形状、大小等进行分类,可以得到不同类型的圆柱角点,从而可以对圆柱进行更加细致的分析和处理。
halconxld线段中点、端点和角度的计算
halconxld线 段 中 点 、 端 点 和 角 度 的 计 算
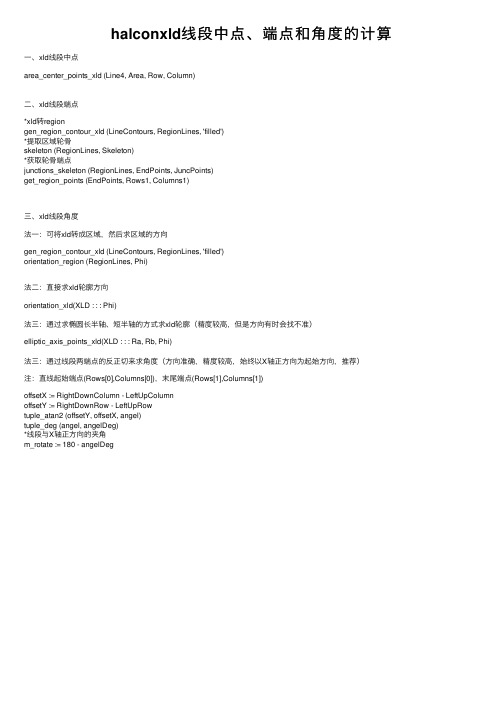
一、xld线段中点 area_center_points_xld (Line4, Area, Row, Column)
二、xld线段端点 *xld转region gen_region_contour_xld (LineContours, RegionLines, 'filled') *提取区域轮骨 skeleton (RegionLines, Skeleton) *获取轮骨端点 junctions_skeleton (RegionLines, EndPoints, JuncPoints) get_region_points (EndPoints, Rows1, Columns1)
法三:通过求椭圆长半轴、短半轴的方式求xld轮廓(精度较高,但是方向有时会找不准) elliptic_axis_points_xld(XLD : : : Ra, Rb, Phi)
法三:通过线段两端点的反正切来求角度(方向准确,精度较高,始终以X轴正方向为起始方向,推荐) 注:直线起始端点(Rows[0],Columns[0]),末尾端点(Rows[1],Columns[1]) offsetX := RightDownColumn - LeftUpColumn offsetY := RightDownRow - LeftUpRow tuple_atan2 (offsetY, offsetX, angel) tuple_deg (angel, angelDeg) *线段与X轴正方向的夹角 m_rotate := 180 - angelDeg
三、xld线段角度 法一:可将xld转成区域,然后求区域的方向 gen_region_contour_xld (LineContours, RegionLines, 'filled') orientation_region (RegionLines, Phi)
halcon圆柱角点展平案例
halcon圆柱角点展平案例Halcon圆柱角点展平是一种用于处理图像中圆柱体表面的技术。
它可以通过识别圆柱体的角点,并将其展平为一个二维图像,从而方便后续的图像处理和分析。
下面将列举一些关于Halcon圆柱角点展平的案例,以帮助读者更好地理解这一技术的应用。
1. 检测圆柱瓶口位置在生产线上,经常需要对圆柱瓶的瓶口进行检测。
利用Halcon圆柱角点展平技术,可以准确地检测到瓶口的位置和形状,从而实现自动化的生产线控制。
2. 检测圆柱体表面缺陷圆柱体表面的缺陷对于某些行业来说非常重要,例如电子元器件的制造。
利用Halcon圆柱角点展平技术,可以对圆柱体表面的缺陷进行高精度的检测和分析,提高产品的质量和可靠性。
3. 圆柱体表面贴标检测在包装行业中,常常需要对圆柱体上的标签进行检测和识别。
利用Halcon圆柱角点展平技术,可以准确地检测到标签的位置和形状,从而实现自动化的包装生产线。
4. 圆柱体的三维重建通过多个角度拍摄圆柱体的图像,结合Halcon圆柱角点展平技术,可以实现对圆柱体的三维重建。
这对于一些需要对圆柱体进行形状分析和测量的应用非常有用。
5. 检测圆柱体的偏斜角度在一些工业应用中,需要对圆柱体的偏斜角度进行检测和测量。
利用Halcon圆柱角点展平技术,可以准确地测量圆柱体的偏斜角度,从而实现对产品的质量控制。
6. 圆柱体的表面缺陷分类在某些应用中,需要对圆柱体的表面缺陷进行分类。
利用Halcon圆柱角点展平技术,可以将圆柱体的表面缺陷分为不同的类别,从而实现对产品质量的评估和控制。
7. 圆柱体表面的纹理分析圆柱体表面的纹理对于某些应用来说非常重要,例如纺织品的质量检测。
利用Halcon圆柱角点展平技术,可以对圆柱体表面的纹理进行分析和识别,从而实现对产品质量的控制。
8. 圆柱体的形状匹配在一些应用中,需要将一个圆柱体与一个标准模板进行形状匹配。
利用Halcon圆柱角点展平技术,可以实现对圆柱体形状的高精度匹配,从而实现对产品的质量控制。
halcon形状匹配用圆匹配一半圆的案例
形状匹配是计算机视觉领域中的一个重要技术,它可以用于在图像中找到特定形状的目标,并且可以在不同尺度和旋转角度下自适应地进行匹配。
Halcon作为一种常用的计算机视觉软件评台,也提供了形状匹配的功能。
在实际应用中,形状匹配的需求是多种多样的,本文将针对一种特殊的案例进行讨论,即使用圆去匹配一半圆的情况。
1. 背景在工业生产中,常常会遇到需要检测或定位产品中的零部件或特定形状的需求。
其中,一种常见的情况是需要检测或定位圆形零件的一半圆形。
具体地说,我们需要在图像中找到一个半圆形的目标,并且得出它的位置和角度信息。
2. 常规方法在Halcon中,进行形状匹配通常使用find_shape_model和find_scaled_shape_model等函数。
这些函数可以通过预先建立的模板图像来寻找目标图像中的匹配对象,并且可以进行多尺度、角度的自适应匹配。
然而,针对半圆形的匹配通常会有一定的挑战,因为传统的形状模板可能不够精确地描述半圆形的特征。
3. 圆匹配一半圆的方案针对这一问题,我们提出了一种新的方案,即使用圆形模板去匹配半圆形目标。
具体地,我们首先根据半圆形目标的特点,构建一个圆形模板。
在进行形状匹配时,我们可以通过调整匹配的分数阈值和最小匹配数量来筛选出符合要求的半圆形目标。
4. 实验结果我们进行了一系列的实验来验证这一方案的可行性。
实验中,我们选取了多幅包含半圆形目标的图像,并分别采用了传统的半圆形模板和我们提出的圆形模板进行形状匹配。
实验结果表明,我们提出的方案不仅可以有效地检测出半圆形目标,而且对目标的尺度和角度变化具有很好的适应性。
5. 结论我们提出了一种新的方案,即使用圆形模板去匹配半圆形目标。
通过一系列的实验验证,我们证明了这一方案的可行性和有效性。
这一方案不仅可以满足工业生产中对半圆形目标的检测和定位需求,而且还具有更好的泛化性和适应性。
在实际应用中,我们相信这一方案可以发挥重要作用,为工业生产带来更高效、更精准的形状匹配技术。
halcon 平面法向量 平面倾斜角度

halcon 平面法向量平面倾斜角度摘要:1. Halcon 简介2.平面法向量概念3.平面倾斜角度计算方法4.Halcon 在平面法向量和倾斜角度计算中的应用5.实际应用案例及优势正文:一、Halcon 简介Halcon 是一款功能强大的机器视觉开发软件,广泛应用于各种工业自动化领域。
它具有丰富的图像处理、分析和识别功能,为用户提供了一套完整的图像处理解决方案。
在本文中,我们将重点介绍如何利用Halcon 计算平面法向量和平面倾斜角度。
二、平面法向量概念平面法向量是指在二维平面内,与该平面垂直的向量。
它可以用来表示平面内某一点或某一物体的方向。
在图像处理中,平面法向量常用于描述图像边缘、轮廓的方向,有助于我们更好地理解图像特征。
三、平面倾斜角度计算方法平面倾斜角度是指物体在平面内的倾斜程度,通常用角度表示。
计算平面倾斜角度的方法有多种,其中一种常见的方法是通过计算物体在平面法向量上的投影长度与物体在平面上的实际长度的比值来得到。
此外,还可以通过计算物体在平面法向量上的投影长度与物体在平面上的实际长度的差值,再除以物体在平面法向量上的投影长度的平方和来得到倾斜角度。
四、Halcon 在平面法向量和倾斜角度计算中的应用Halcon 提供了丰富的图像处理函数,可以轻松地实现平面法向量和倾斜角度的计算。
以下是一个简单的例子:1.读取图像并进行预处理,如滤波、去噪等;2.利用边缘检测算法(如Canny 算子)提取图像边缘;3.计算边缘点的梯度方向,得到平面法向量;4.计算边缘点在平面法向量上的投影长度;5.计算物体在平面上的实际长度;6.根据投影长度和实际长度的比值或差值,计算平面倾斜角度。
五、实际应用案例及优势在实际应用中,Halcon 计算平面法向量和倾斜角度的功能可以帮助我们实现如下目标:1.检测图像中的倾斜物体,如检测建筑物的倾斜程度;2.测量物体的尺寸,如测量平面图像中物体的长度、宽度等;3.校正图像,如纠正摄像头引起的图像畸变等。
halcon 点法式成平面

halcon 点法式成平面1.引言1.1 概述点法式是计算机视觉领域中的一种重要的数学方法,它在图像处理和模式识别中发挥着重要的作用。
点法式的概念是基于数学几何中直线的概念而推广而来的,它描述了直线在二维平面上的数学特征,如斜率和截距。
而将点法式应用于成平面这一概念,则是将其扩展到了三维空间中的平面拟合问题。
在成平面中,点法式可以被用来描述平面在三维空间中的几何特征。
它包含了平面的法向量和一个经过平面上某点的向量。
通过这两个向量,我们可以推导出平面的方程,从而对平面进行建模和分析。
点法式在成平面中的应用十分广泛,如三维重建、物体识别和机器人导航等领域。
点法式的广泛应用使得它成为计算机视觉研究中不可或缺的数学工具。
通过对点法式的理解和运用,我们可以更准确地进行平面拟合和分析,从而提高图像处理和模式识别的准确性和效率。
同时,点法式也为我们提供了一种理解和描述三维空间中平面几何性质的方法,为进一步研究和应用提供了基础。
本文的目的就是对点法式在成平面中的应用进行深入探讨,探究其在计算机视觉中的重要性和潜在的发展方向。
通过系统性的分析和实验研究,我们希望能够全面了解点法式的特点和优势,并发现其在实际应用中的问题和挑战。
最终,我们希望能够为点法式的研究与应用提供有益的思考和启示,促进计算机视觉领域的进一步发展。
1.2文章结构文章结构部分的内容可以按照以下方式编写:文章结构部分的主要目的是介绍和解释整篇文章的组织结构,以帮助读者更好地理解和阅读文章。
本文将按照以下三个主要部分来组织论述:引言、正文和结论。
引言部分将提供文章的背景信息和目的,概述点法式的重要性,并介绍本文的结构。
正文部分将详细讨论点法式的概念和在成平面中的应用。
结论部分将总结点法式的重要性,并对其在未来的发展进行展望。
在引言部分,我们将概述本文的主要内容和目的。
首先,我们将介绍点法式的概念以及它在成平面中的应用。
然后,我们将探讨点法式的重要性,并展望它在未来的发展潜力。
halcon坐标变换放射变换带角度

halcon坐标变换放射变换带角度
摘要:
1.坐标变换概述
2.哈尔科恩坐标变换
3.放射变换定义及特点
4.哈尔科恩坐标变换与放射变换的关系
5.应用实例
正文:
一、坐标变换概述
坐标变换是指将一个图形中的点、线或面按照一定的规则进行转换,从而得到一个新的图形。
在计算机图形学中,坐标变换是实现图形变换和图像处理的基本方法之一。
常见的坐标变换有平移、旋转、缩放和反转等。
二、哈尔科恩坐标变换
哈尔科恩坐标变换(Halcon Transform)是一种基于几何变换的坐标变换方法,它可以将一个图形中的点按照一定的角度进行旋转,同时保持原图形与新图形之间的平行关系。
哈尔科恩坐标变换广泛应用于计算机图形学、图像处理和机器视觉等领域。
三、放射变换定义及特点
放射变换(Radial Transform)是一种特殊的坐标变换,它将一个图形中的点按照一定的中心点进行放射状分布,形成一个新的图形。
放射变换的特点是保持原图形与新图形之间的角度不变,同时新图形的尺寸与原图形的尺寸成比例。
放射变换广泛应用于计算机图形学、图像处理和机器视觉等领域。
四、哈尔科恩坐标变换与放射变换的关系
哈尔科恩坐标变换和放射变换都是坐标变换的一种,它们有着相似之处,但也有所区别。
相似之处在于它们都可以实现图形的旋转和缩放;不同之处在于哈尔科恩坐标变换是基于几何变换的,而放射变换是基于角度不变的变换。
在实际应用中,可以根据具体需求选择合适的变换方法。
五、应用实例
哈尔科恩坐标变换和放射变换在实际应用中都有广泛的应用。
halcon角点检测实例
halcon角点检测实例楼主#更多发布于:2013-11-15 18:18This program compares the result of different operators* which detect points of interest*dev_update_off ()Dark := 100Background := 175Light := 250Angle := rad(45)Size := 3create_test_image (Image, Background, Light, Dark)dev_close_window ()get_image_size (Image, Width, Height)dev_open_window (0, 0, 512, 512, 'black', WindowHandle)set_display_font (WindowHandle, 16, 'mono', 'true', 'false')dev_set_color ('black')dev_set_line_width (3)** Foerstner interest points detectorpoints_foerstner (Image, 1, 2, 3, 200, 0.3, 'gauss', 'true', RowJunctions, ColJunctions, CoRRJunctions, CoRCJunctions, CoCCJunctions, RowArea, ColArea, CoRRArea, CoRCA rea, CoCCArea)gen_cross_contour_xld (CrossFoerstner, RowJunctions, ColJunctions, Size, Angle) dev_display (Image)dev_display (CrossFoerstner)disp_message (WindowHandle, 'Foerstner interest points detector', 'window', 12, 12, 'black', 'true')disp_continue_message (WindowHandle, 'black', 'true')stop ()** Harris interest points detectorpoints_harris (Image, 0.7, 2, 0.04, 0, RowHarris, ColHarris)gen_cross_contour_xld (CrossHarris, RowHarris, ColHarris, Size, Angle)dev_display (Image)dev_display (CrossHarris)disp_message (WindowHandle, 'Harris interest points detector', 'window', 12, 12, 'bla ck', 'true')disp_continue_message (WindowHandle, 'black', 'true')stop ()** Harris binomial interest points detectorpoints_harris_binomial (Image, 5, 15, 0.04, 1000, 'on', RowHarrisBinomial, ColHarrisB inomial)gen_cross_contour_xld (CrossHarrisBinom, RowHarrisBinomial, ColHarrisBinomial, Size, Angle)dev_display (Image)dev_display (CrossHarrisBinom)disp_message (WindowHandle, 'Harris binomial interest points detector', 'window', 12, 12, 'black', 'true')disp_continue_message (WindowHandle, 'black', 'true')stop ()** Sojka interest points detectorpoints_sojka (Image, 9, 2.5, 0.75, 30, 90, 0.5, 'true', RowSojka, ColSojka)gen_cross_contour_xld (CrossSojka, RowSojka, ColSojka, Size, Angle)dev_display (Image)dev_display (CrossSojka)disp_message (WindowHandle, 'Sojka interest points detector', 'window', 12, 12, 'bla ck', 'true')disp_continue_message (WindowHandle, 'black', 'true')stop ()** Lepetit interest points detectorpoints_lepetit (Image, 3, 1, 20, 35, 'interpolation', RowLepetit, ColLepetit)gen_cross_contour_xld (CrossLepetit, RowLepetit, ColLepetit, Size, Angle)dev_display (Image)dev_display (CrossLepetit)disp_message (WindowHandle, 'Lepetit interest points detector', 'window', 12, 12, 'bl ack', 'true')红色的create_test_image (Image, Background, Light, Dark)这个函数为外部函数(即自己所写函数)具体的过程创建见下一节。
基于HALCON与图像拼接的文物修复系统设计与实现_白宗文
Σ Σ Σ 茚 茚 M= w(x,y) x,y
I2 x
Ix Iy
Ix Iy I2
y
=w(x,y)茚
I2 x
Ix Iy
Ix Iy I2
y
(1)
式中,M 表示相关矩阵,Ix 为 x 方向的差分,Iy 为 y 方向的
差 分 ,w(x,y) 为 高 斯 函 数 。
R=det(M)-κ(traceM)2
(2)
2.2 图像匹配算法
为便于描述, 首先设 A 和 B 是为两幅待拼接图像, 用
相 同 的 阈 值 R0 提 取 其 角 点 , 设 角 点 集 分 别 C A= (C1,C2, …
Cm) ,C
B= (C 1′
,C
′ 2
,
…
C′ n
),显然
A
和
B
只有部分重合,图像匹
配问题转化为在集合 C A 和 C B 中求两个最小的子集, 使得
子对图像中的每个点都计算其兴趣值, 然后在邻域中选择最
优点。 实验表明,在纹理信息丰富的区域,Harris 算子可以提
取出大量有用的特征点,而在纹理信息少的区域,提取的特征
点则较少。 3)稳定:Harris 算子的计算公式中只涉及到一阶导
数,因此对图像旋转、灰度变化、噪声影响和视点变换不敏感,
它也是比较稳定的一种点特征提取算子。
文物 是 考 古学 重 要 研究 对 象 之一 ,由 于 自 然 和 人 为 的 原 大,速 度 慢 ;李冬 梅[3]等 人采 用 基 于特 征 点 灰 度 相 关 原 理 的 方
因 ,在 考 古 挖 掘 现 场 通 常 出 土 成 千 上 万 的 文 物 碎 片 ,如 何 从 法,通 过 Harris 角 点算 法 提 取 特 征 点 ,完 成 了 图 像 的 拼 接 ,但
halcon九点及旋转标定流程

halcon九点及旋转标定流程一、啥是九点标定和旋转标定呀。
咱先唠唠这九点标定和旋转标定是个啥玩意儿。
九点标定呢,就像是给相机和要测量的物体之间建立一种特殊的联系,就好比是两个人互相认识得有个介绍过程一样。
通过九个特定的点,让相机知道这个物体在它眼里的位置关系,这样相机就能更准确地测量这个物体啦。
那旋转标定呢,这就更酷了。
想象一下,物体在空间里可能会转来转去的,旋转标定就是让相机能明白这个物体不管怎么转,它都能准确地知道物体的状态。
这就好比你和小伙伴玩捉迷藏,不管小伙伴怎么转着躲,你都能找到他一样。
二、准备工作。
1. 硬件准备。
咱们得有个好相机呀,这相机就像是我们的眼睛一样。
要确保相机安装得稳稳当当的,要是相机晃来晃去的,那可就像近视眼没戴眼镜看东西,肯定不准。
然后呢,要有一个标定板,这个标定板上面有那些个用来标定的点,它可是很重要的哦。
就像考试的试卷一样,上面的题目就是那些点,相机得好好“答题”。
2. 软件准备。
当然得有halcon软件啦。
打开这个软件就像打开一个魔法盒子,里面有各种神奇的功能等着我们去探索。
在软件里要设置好一些基本的参数,比如说图像的分辨率呀,这些参数就像是做菜时候的调料,放得合适了,做出来的菜才美味,图像才清晰准确。
三、九点标定流程。
1. 采集图像。
让相机对着标定板,就像小朋友看黑板一样,要看得清清楚楚的。
然后采集标定板的图像,这时候要注意啦,采集的图像质量要好,如果图像模糊不清,那就像是雾里看花,后面的标定肯定会出问题的。
多采集几张图像,就像多做几次实验一样,这样更保险。
2. 找角点。
在采集到的图像里,要找到标定板上的那些角点。
这可有点像寻宝游戏,在一幅图里找到那些隐藏的宝贝角点。
halcon有专门的函数可以用来找角点,用起来还挺方便的,就像用魔法棒一点,角点就出现了。
3. 计算标定参数。
找到角点之后呢,就可以根据这些角点的信息来计算标定参数啦。
这个过程有点复杂,就像做一道很难的数学题,不过好在halcon会帮我们完成大部分的计算工作。
halcon标定例子
halcon标定例子Halcon标定是一种用于机器视觉系统中相机和图像采集设备的校准方法。
通过标定,可以获得相机的内部参数和外部参数,从而提高图像处理和计算机视觉系统的精度和稳定性。
下面是十个关于Halcon标定的例子:1. Halcon标定的基本原理Halcon标定是通过采集一系列已知位置和姿态的标定板图像,从而计算出相机的内部参数和外部参数。
这些参数可以用于图像校正、三维重建等应用。
2. Halcon标定的步骤Halcon标定的主要步骤包括:选择标定板、采集标定图像、提取标定板角点、计算相机参数、优化标定结果等。
3. Halcon标定的精度评估Halcon标定的精度可以通过重投影误差来评估,即将标定板上的角点投影到图像上,然后计算投影点与实际角点之间的距离。
4. Halcon标定的误差来源Halcon标定的误差来源主要包括相机畸变、标定板姿态误差、标定板角点检测误差等。
这些误差会影响标定结果的精度。
5. Halcon标定的应用场景Halcon标定广泛应用于机器视觉系统中的目标检测、定位、测量等任务。
通过标定,可以提高系统的测量精度和稳定性。
6. Halcon标定的优化方法Halcon标定可以通过优化算法来提高标定结果的精度。
常用的优化方法包括非线性最小二乘法、Bundle Adjustment等。
7. Halcon标定的注意事项在进行Halcon标定时,需要注意选择合适的标定板、保证标定板的平整度、正确设置相机参数等。
8. Halcon标定的挑战和解决方案Halcon标定在实际应用中可能面临光照变化、相机运动等挑战。
针对这些问题,可以采用多视角标定、动态标定等方法来解决。
9. Halcon标定的未来发展趋势随着机器视觉技术的不断发展,Halcon标定也在不断演进。
未来的发展趋势包括更精确的标定方法、更高效的标定算法等。
10. Halcon标定的局限性虽然Halcon标定可以提高机器视觉系统的精度和稳定性,但仍然存在一些局限性,如对标定板的要求较高、对标定图像的要求较严格等。
halcon简单案例
halcon简单案例那咱们就来个超级简单又有趣的Halcon案例:检测圆。
想象一下,你有一张图片,上面可能有各种各样的形状,但是你就想找到那些圆溜溜的家伙,就像在一堆水果里挑出苹果一样。
首先呢,在Halcon里,你得把这张图片读进来。
这就好比你把水果盘端到面前,准备挑苹果啦。
代码大概是这样的:read_image(Image, 'your_image.jpg')这里的`read_image`就是Halcon里专门用来把图片读进程序的魔法咒语,`Image`是我们给这张图片取的名字,就像你给你的宠物取个名字一样,方便后面提到它。
`'your_image.jpg'`就是你图片的文件名啦,如果你的图片在别的地方或者是别的格式,你就得改改这个地方哦。
然后呢,我们要把这张图片变得黑白分明一点,这样更容易找到圆。
这就像是给水果打个光,让苹果更明显一样。
rgb1_to_gray(Image, GrayImage)`rgb1_to_gray`这个魔法就是把彩色的图片(RGB)变成灰色的,`GrayImage`就是变灰之后的图片的新名字啦。
接下来,就是找圆的关键时刻啦。
Halcon有个很厉害的工具,就像是专门用来找圆的小雷达:threshold(GrayImage, Region, 100, 255)closing_circle(Region, RegionClosing, 5.5)connection(RegionClosing, ConnectedRegions)select_shape(ConnectedRegions, SelectedRegions, ['circularity'], 'and', [0.8])`threshold`这个魔法呢,是把灰色图片里的颜色分分类,把比较亮的部分(这里我们设的是100到255之间的亮度)单独挑出来,变成一个区域,这个区域就叫`Region`。
halcon模板偏位案例
halcon模板偏位案例
以下是一个Halcon模板偏位的案例:
在这个案例中,我们将使用Halcon软件来定位和检测印刷品上的文字。
假设我们有一个商标图案,商标上有一段文字。
我们希望通过模板匹配来定位和偏位检测商标图案上的文字。
首先,我们需要创建一个模板,用于匹配商标上的文字。
1. 打开Halcon软件,并导入商标图像。
2. 使用矩形选择工具来选择商标上的文字区域。
3. 点击“模板”选项卡,然后点击“创建新模板”按钮。
4. 在打开的对话框中,选择“标定”作为模板类型,并选择合适的标定方法。
5. 调整标定参数,以确保模板能准确地匹配商标上的文字。
6. 点击“创建”按钮,然后选择保存模板文件。
接下来,我们将使用创建的模板来定位商标图案上的文字,并检测其偏位情况。
1. 导入一张包含商标图案的图像。
2. 点击“模板”选项卡,然后点击“查找模板”按钮。
3. 在打开的对话框中,选择之前创建的模板文件。
4. 调整匹配参数,以确保能够准确地找到商标图案上的文字。
5. 点击“查找”按钮,Halcon将会自动定位商标图案上的文字并显示结果。
6. 根据显示的结果,可以判断出文字是否偏位。
如果需要进一步分析偏位情况,可以进行额外的测量和计算。
这个案例展示了如何使用Halcon软件进行模板偏位的检测。
根据具体情况,你可能需要调整参数和方法以获得更好的匹配结果。
halcon9点标定例程
Halcon 9点标定例程简介Halcon是一款功能强大的机器视觉软件,广泛应用于工业自动化、机器人视觉、医疗影像等领域。
其中,点标定是Halcon中常用的标定方法之一。
本文将介绍Halcon中的9点标定例程,包括基本原理、步骤、代码示例以及注意事项。
基本原理点标定是通过在图像中选取多个已知世界坐标和对应的像素坐标,建立世界坐标和像素坐标之间的转换关系。
这样,在后续的图像处理中,就可以通过已知的世界坐标计算出像素坐标,或者通过已知的像素坐标计算出世界坐标。
Halcon的9点标定例程是一种基于透视变换的标定方法。
透视变换是一种将三维空间中的点映射到二维平面上的变换,可以用来描述相机成像的过程。
通过选取多个已知世界坐标和对应的像素坐标,可以计算出透视变换的参数,从而建立世界坐标和像素坐标之间的转换关系。
步骤1.准备标定板:选择一个平面上的标定板,标定板上有多个已知世界坐标的点,一般选择9个点,可以是方形或圆形。
2.拍摄图像:使用相机拍摄多张含有标定板的图像,要求标定板在不同位置和姿态下的图像都有。
3.提取角点:对每张图像进行角点提取,即找到标定板上的角点像素坐标。
4.建立世界坐标和像素坐标的对应关系:将每个角点的像素坐标与其对应的已知世界坐标进行匹配,建立世界坐标和像素坐标的对应关系。
5.计算透视变换参数:使用Halcon提供的函数,根据已知的世界坐标和像素坐标的对应关系,计算出透视变换的参数。
6.验证标定结果:使用标定结果对其他图像进行校正,计算校正后的像素坐标与实际世界坐标的误差,以验证标定结果的准确性。
代码示例下面是一个简单的Halcon代码示例,演示了如何进行9点标定:# 读取图像read_image(Image, 'image.jpg')# 提取角点find_calib_object(Image, CalibModelID, 9, 1, 0.02, 6, 0, 'all', 'all')# 建立世界坐标和像素坐标的对应关系create_calib_data('calib_data', CalibModelID, [], [])# 计算透视变换参数calibrate_cameras('calib_data', [], [], 'calib_param', Error)# 验证标定结果gen_cross_contour_xld(Cross, 100, 100, 10, 0)project_cross_contour_xld(Cross, CrossProject, 'calib_param')dev_display(Image)dev_display(CrossProject)注意事项1.标定板的选取:标定板应该是平面的,并且上面的点要尽量均匀分布。
Halcon例子说明

Halcon例子说明Halcon实例说明1、inspect_bottle_mouth.hdev:易拉管缺陷检测。
用到了极坐标变换2、circular_barcode.hdev:一维条码检测,用到坐标变换。
弧形拉直。
用到了极坐标变换3、surface_scratch.hdev:表面划伤检测。
4、ball.hdev:PCB板焊锡点检测。
用到常用算子及开运算opening。
5、best_match_rot_mg_clip1.hdev:带方向的基本模版匹配 6、bin_threshold.hdev:计算图片中的灰度直方图7、bin_threshold2.hdev:程序说明怎样bin_threshold与threshold之间的相等转换计算。
8、bottle.hdev:OCR字符的检测 9、bottlet.hdev:OCR字符的检测10、check_blister.hdev:药品颗粒检测。
用一些常用算子及坐标变换,图片旋转。
11、check_bottle_crate.hdev:圆孔检测。
用到opening_circle、select_shape等常用处理算子。
12、check_hazelnut_wafers.hdev:检测物体表面缺陷。
很好的用到了开运算算子opening_circle和闭运算算子closing_circle13、check_smd_tilt.hdev:检测SMD用到算子sobel_amp边缘检测,measure_projection 14、check_soft_cheese.hdev:用到算子有彩色图转换为灰度图(rgb1_to_gray),模版匹配 15、create_shape_model、find_shape_models,图像坐标变转vector_angle_to_rigid 、 affine_trans_contour_xld等算子。
16、circles.hdev:圆拟合算子(fit_circle_contour_xld),边缘检测(edges_sub_pix)。
halcon实例求不规则图形角度
halcon实例求不规则图形角度1、计算直线与水平轴之间的夹角angle_lx( : : Row1, Column1, Row2, Column2 : Angle)角度计算方式:将直线看作向量(有方向性),以直线与水平轴的交点为起点(旋转中心)。
如果终点在水平轴上方,则夹角为逆时针旋转水平轴到向量的角度(带正号)。
如果终点在水平轴下方,则夹角为顺时针旋转水平轴到向量的角度(带负号)。
结果取决于定义线条的两点的顺序。
角度表示方式:弧度,-π<=Angle<π2、计算两条直线之间的夹角angle_ll( : : RowA1, ColumnA1, RowA2, ColumnA2, RowB1, ColumnB1, RowB2, ColumnB2 : Angle)角度计算方式:该算子计算原理与angle_lx类似,只不过把水平轴替换为任意直线B角度表示方式:弧度,-π<=Angle<=π3、计算一条直线的方向line_orientation( : : RowBegin, ColBegin, RowEnd, ColEnd : Phi)角度计算方式:当直线(无方向性)大致位于1、3象限的方向,角度为正。
当直线大致位于2、4象限的方向,角度为负。
角度表示方式:弧度,-π/2<Phi<=π/24、计算一条直线的参数line_position( : : RowBegin, ColBegin, RowEnd, ColEnd : RowCenter, ColCenter, Length, Phi)角度计算方式:同算子 line_orientation。
角度表示方式:弧度,-π/2<Phi<=π/25、计算区域等效椭圆的参数elliptic_axis(Regions : : : Ra, Rb, Phi)角度计算方式:该区域等效椭圆的主轴(无方向性)相对于水平轴(有方向性)的角度。
halcon 点法式成平面 -回复
halcon 点法式成平面-回复Halcon点法式成平面的方法是如何实现的呢?本文将以此为主题,详细阐述在Halcon中如何使用点法式方法构建平面模型。
Halcon是一款功能强大的机器视觉软件,被广泛应用于工业自动化领域。
在机器视觉中,平面模型是常见且重要的概念之一。
利用平面模型,我们可以对图像中的平面形状进行分析和处理。
点法式是一种基于点和法向量的表示方法,可以用来定义平面模型。
在Halcon中,可以通过一系列的步骤来构建和应用点法式平面模型。
首先,我们需要获取用于构建平面的数据点集。
这些数据点可以是从图像中提取的特征点,也可以是通过传感器获取的已知坐标点。
在Halcon 中,可以使用`gen_contour_polygons_xld`函数来获取一个闭合轮廓的点集。
例如,我们可以获取图像中的边缘点,并将其转化为点集。
接下来,我们需要通过点集来计算平面的法向量。
在Halcon中,可以使用`fit_plane_points`函数来实现这一功能。
该函数接受一个点集作为输入,并返回一个法向量和一个参考点。
法向量定义了一个垂直于平面的方向,而参考点可以用于计算平面上的一个点。
根据文档显示,该函数还可以根据所提供的最小二乘法标准化系数来控制数据拟合的精度。
一旦我们获得了平面的法向量和参考点,就可以构建点法式平面模型了。
在Halcon中,可以使用`gen_plane`函数来生成一个平面模型。
该函数接受一个法向量和参考点作为输入,并返回一个平面模型。
平面模型由三维坐标系中的原点和法向量定义。
接下来,我们可以利用平面模型来进行各种分析和处理。
例如,可以使用`distance_pl`函数来计算点到平面的最短距离。
该函数需要传递一个平面模型和一个点作为输入,并返回点到平面的距离。
此外,在实际应用中,我们可能需要根据实际需求对点法式平面模型进行调整。
在Halcon中,可以使用`change_plane_params`函数来修改平面模型的参数。
halcon 点法式成平面 -回复
halcon 点法式成平面-回复标题:Halcon点法式成平面:构建现实世界中三维平面的强大工具简介:在计算机视觉领域中,Halcon点法式成平面是一种广泛应用的工具,用于将三维世界中的点和法线信息转化为平面。
本文将一步一步地回答关于Halcon点法式成平面的相关问题,包括其定义、工作原理及应用。
第一部分:定义Halcon点法式成平面是一种基于点云数据和法线信息的空间几何建模方法。
它通过分析点云数据集中的点的位置和彼此之间的几何关系,以及法线矢量的方向和大小来构建平面模型。
在Halcon中,平面由一个点和一个垂直于该平面的法线向量定义。
第二部分:工作原理1. 点云数据采集:首先,需要通过各种三维扫描设备(如激光雷达、立体相机等)来采集目标场景的点云数据。
这些设备可以以不同的方式获取点云信息,包括通过光线反射、红外透射等。
2. 点云数据处理:将采集到的点云数据导入Halcon软件中,对数据进行预处理和滤波。
这些步骤旨在去除噪声、平滑曲面以及提取关键特征点。
3. 法线向量计算:基于点云数据,Halcon通过计算每个点的法线向量来描述其所在平面的几何特性。
法线向量是垂直于平面的矢量,它代表了平面的方向和倾斜程度。
4. 平面因子化:Halcon通过将点云数据集中的点和其相应的法线向量输入到点法式成平面算法中,从而得到最佳的平面模型。
该算法基于一系列最小二乘法来拟合平面,并计算出最优的平面参数。
5. 平面模型生成:一旦获得了最优的平面参数,Halcon将利用该参数生成一个完整的平面模型。
平面模型通常由一系列三维点组成,可用于可视化、建模和分析。
第三部分:应用Halcon点法式成平面在多个领域中都有广泛的应用,包括工业制造、机器视觉、医疗影像和地理测绘等。
以下是一些典型的应用场景:1. 物体识别与定位:基于点法式成平面,Halcon可以实现对目标物体的定位和识别。
通过匹配目标物体的平面模型和实际场景中的平面特征,可以精确地确定物体在三维空间中的位置和姿态。
一种基于HALCON的螺栓角点提取方法

一种基于HALCON的螺栓角点提取方法
姜春英;王国辉;张诚然;叶长龙
【期刊名称】《机械工程师》
【年(卷),期】2016(000)005
【摘要】螺栓角点提取包括螺栓六边形区域的提取、螺栓外轮廓线的提取、角点提取三个部分.在进行区域提取时采用动态阈值分割法,该方法避免了噪声和光照所带来的影响,它是一种通用型的区域提取方法.外轮廓线的提取需要像素精度到亚像素精度的转变.文中采用rammer算法来进行轮廓分割,用Tukey权重函数经过5次迭代来进行直线拟合,找到直线交点,即是螺栓角点.此实验采用的软件是HALCON,该软件的应用能够提升图像分析处理的效率,它能够提供丰富的函数库,其函数库可以由C、C++和Delphi等多种编程语言进行访问.实验结果表明,采用该方法可成功地将螺栓地角点提取出来,而且该方法具有通用、快速以及准确等特点.
【总页数】4页(P34-37)
【作者】姜春英;王国辉;张诚然;叶长龙
【作者单位】沈阳航空航天大学,沈阳 110000;沈阳航空航天大学,沈阳 110000;沈阳航空航天大学,沈阳 110000;沈阳航空航天大学,沈阳 110000
【正文语种】中文
【中图分类】TP391.41
【相关文献】
1.一种基于小波变换的角点提取方法 [J], 彭晓明;张启衡
2.一种基于自适应阈值的SUSAN角点提取方法 [J], 刘博;仲思东
3.一种基于小波变换的平面曲线角点提取方法研究 [J], 胡军;刘文江;李嘉;胡怀中
4.一种新的遥感影像角点提取方法 [J], 宋妍;苟永刚;郑坤
5.一种改进的SUSAN角点提取方法 [J], 叶伯洪;徐杜;蒋永平;郭伟华;傅文兰因版权原因,仅展示原文概要,查看原文内容请购买。
halcon 纵向投影方法
halcon 纵向投影方法
Halcon纵向投影方法是一种用于图像处理和计算机视觉的分析技术。
它可以通过对图像进行纵向投影来提取关键的特征信息,从而实现目标的识别、检测和测量等应用。
纵向投影法是基于图像灰度分布的思想,通过统计每一列(或行)的像素灰度值,并将结果显示为一个灰度分布图,从而揭示图像中的特征。
在Halcon中,纵向投影法可以应用于检测条形码、字符识别、边缘检测等多种场景。
使用Halcon进行纵向投影的方法比较简单。
首先,我们需要加载图像,并将其转换为灰度图。
然后,通过计算每一列像素的平均灰度值,可以得到一个纵向投影图。
在得到纵向投影图后,我们可以通过分析图像的平均灰度值来提取关键的特征信息。
例如,可以通过找到灰度值的峰值或谷值来检测条形码的边界,或者通过分析峰值之间的距离来测量目标的尺寸等。
除了纵向投影法,Halcon还提供了许多其他的图像处理和分析方法,如边缘检测、轮廓分析等。
这些方法可以互相结合,以实现更复杂的图像处理任务。
总之,Halcon纵向投影方法是一种强大且灵活的图像处理技术,可以用于各种计算机视觉应用。
通过分析图像的纵向投影,我们可以提取目标的关键特征信息,从而实现目标的识别、测量和检测等目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
halcon圆柱角点展平案例
Halcon圆柱角点展平是一种在机器视觉领域常用的图像处理技术,用于提取圆柱体的角点并将其展平。
以下是一些关于Halcon圆柱角点展平的案例,以帮助读者更好地理解这个概念。
1.案例一:汽车零部件检测
在汽车零部件生产过程中,常需要对圆柱体进行检测,以确保其尺寸和位置的准确性。
通过Halcon圆柱角点展平技术,可以快速准确地提取圆柱体的角点,并进行测量和判断,从而实现自动化检测。
2.案例二:工业机器人导航
在工业机器人的导航中,需要识别和定位环境中的圆柱体,以辅助机器人的运动和操作。
通过Halcon圆柱角点展平技术,可以提取圆柱体的角点信息,并将其用于机器人的路径规划和导航,从而实现高效准确的自动化操作。
3.案例三:医学影像分析
在医学影像分析中,常需要对圆柱体进行测量和分析,以辅助医生的诊断和治疗。
通过Halcon圆柱角点展平技术,可以快速准确地提取圆柱体的角点,并进行测量和分析,从而帮助医生做出更准确的诊断和治疗决策。
4.案例四:物体识别和跟踪
在物体识别和跟踪的应用中,常需要提取物体的角点信息,以实现
物体的定位和跟踪。
通过Halcon圆柱角点展平技术,可以提取圆柱体的角点,并将其用于物体的识别和跟踪,从而实现高效准确的物体定位和跟踪。
5.案例五:机器人装配
在机器人装配过程中,常需要对零部件进行定位和对齐,以实现精确的装配。
通过Halcon圆柱角点展平技术,可以提取圆柱体的角点信息,并将其用于机器人的定位和对齐,从而实现高效准确的装配操作。
6.案例六:工业质检
在工业质检中,常需要对产品进行尺寸和位置的检测,以确保产品的质量和一致性。
通过Halcon圆柱角点展平技术,可以快速准确地提取产品中的圆柱体角点,并进行测量和判断,从而实现自动化质检。
7.案例七:机器视觉导航
在机器视觉导航中,常需要对环境中的物体进行识别和定位,以实现机器人的导航和路径规划。
通过Halcon圆柱角点展平技术,可以提取物体的角点信息,并将其用于机器人的导航和路径规划,从而实现高效准确的自主导航。
8.案例八:机器人视觉引导
在机器人视觉引导中,常需要对目标物体进行识别和定位,以实现
机器人的引导和操作。
通过Halcon圆柱角点展平技术,可以提取目标物体的角点信息,并将其用于机器人的引导和操作,从而实现高效准确的机器人视觉引导。
9.案例九:智能仓储系统
在智能仓储系统中,常需要对货物进行识别和定位,以实现自动化的货物管理和处理。
通过Halcon圆柱角点展平技术,可以提取货物的角点信息,并将其用于货物的识别和定位,从而实现高效准确的智能仓储系统。
10.案例十:机器人视觉检测
在机器人视觉检测中,常需要对目标物体进行检测和分析,以实现机器人的自动化检测和判断。
通过Halcon圆柱角点展平技术,可以提取目标物体的角点信息,并将其用于机器人的检测和分析,从而实现高效准确的机器人视觉检测。
通过以上案例,我们可以看到Halcon圆柱角点展平技术在各个领域中的应用潜力和优势。
无论是在工业生产、医疗诊断还是机器人应用中,Halcon圆柱角点展平都可以提供准确可靠的图像处理和分析结果,帮助实现自动化和智能化的目标。
相信随着技术的不断发展和创新,Halcon圆柱角点展平技术将会在更多领域发挥重要作用,为人们的工作和生活带来更多便利和效益。