汽车智能辅助驾驶系统研究与发展-吉林大学
AI在自动驾驶中的研究调研报告
AI在自动驾驶中的研究调研报告在当今科技飞速发展的时代,自动驾驶无疑是一项备受瞩目的前沿技术。
而 AI(人工智能)作为其核心驱动力,正引领着自动驾驶领域发生深刻的变革。
一、AI 在自动驾驶中的作用自动驾驶的目标是让车辆能够在没有人类驾驶员直接干预的情况下,安全、高效地行驶。
AI 在其中扮演着至关重要的角色。
首先,AI 能够通过传感器收集大量的环境数据,包括图像、视频、雷达信号等。
这些数据经过处理和分析,可以让车辆“感知”周围的道路状况、车辆、行人以及其他障碍物。
其次,AI 能够根据感知到的信息进行决策。
例如,判断何时加速、减速、转弯,以及如何应对突发情况。
再者,AI 还能够对车辆的行驶轨迹进行精确的控制,确保车辆按照预定的路线行驶,并且保持稳定和舒适。
二、AI 在自动驾驶中面临的挑战然而,AI 在自动驾驶中的应用并非一帆风顺,还面临着诸多挑战。
数据质量和数量是一个关键问题。
为了让 AI 系统能够准确地理解和应对各种复杂的交通场景,需要海量的高质量数据进行训练。
但获取和标注这些数据往往是困难且昂贵的。
环境的多样性和不确定性也是巨大的挑战。
不同的天气条件、道路状况、交通规则以及其他不可预测的因素,都可能对自动驾驶车辆的决策和控制产生影响。
AI 系统需要具备强大的适应性和鲁棒性,以应对这些变化。
安全和可靠性是至关重要的。
由于自动驾驶涉及到生命安全,AI 系统必须能够保证在任何情况下都能做出正确的决策,并且避免出现故障或错误。
伦理和法律问题也不容忽视。
例如,当自动驾驶车辆面临不可避免的碰撞时,应该如何做出选择,以最小化损失和伤害,这是一个复杂的伦理和法律难题。
三、AI 在自动驾驶中的技术进展尽管面临诸多挑战,AI 在自动驾驶领域仍然取得了显著的技术进展。
深度学习技术的应用使得车辆对环境的感知能力大幅提升。
例如,通过卷积神经网络(CNN),车辆能够更准确地识别物体和场景。
强化学习在决策和控制方面发挥了重要作用。
第五章 智能网联汽车辅助驾驶系统原理与应用

第五章 智能网联汽车辅助驾驶系统原理与应用:自适应巡航系统
自适应巡航系统的定义 汽车自适应巡航系统(Adaptive Cruise Control,ACC)集成了汽车定速巡航控制系统和车辆前方碰撞预警 系统,如果检测到行驶车道的前方存在同向行驶车辆,将计算本车与前车的距离以及相对速度等信息对 车辆进行加速、减速或制动控制,保证本车与前车处于安全距离以内,防止发生追尾事故。
第五章 智能网联汽车辅助驾驶系统原理与应用:高级驾驶辅助系统的定义及类 型
高级驾驶辅助系统的定义 高级驾驶辅助系统(Advanced Driver Assistance System,ADAS),是利用安装在车辆上的传感器、通信装置、 决策及执行等装置,实时监测驾驶员、车辆及其行驶环境,并通过信息及运动控制等方式辅助驾驶员执行 驾驶任务或主动避免碰撞危害的各类系统的总称。
车道跟随辅助系统的应用 起亚凯酷车型的车道跟随辅助系统,该系统主要由4部分构成:摄像头、毫米波雷达、控制单元、车道跟随 辅助功能启动按键。
第五章 智能网联汽车辅助驾驶系统原理与应用:车辆盲区监测系统
车辆盲区监测系统(Blind-Spot Collision-Avoidance Assist,BCA)通过安装在左右后视镜或其它位置的传感器 感知后方道路信息。如果后方有车辆、行人、自行车及其它移动物体靠近时,盲区监测系统就会通过声光报 警器提醒驾驶员或在紧急情况下进行制动。
前方防碰撞辅助系统的定义及发展历程 前方防碰撞辅助系统(Forward Collision Warning,FCW)是通过摄像头、雷达等传感器实时感知车辆前方的 物体,并检测车辆与目标之间的距离并警示驾驶员的一种系统。
AI辅助智能交通系统的研究综述
AI辅助智能交通系统的研究综述智能交通系统(Intelligent Transportation System,ITS)是利用先进的信息和通信技术,通过对交通运行过程中产生的大量数据进行采集、处理和分析,实现交通管理、交通预测、交通控制以及交通信息服务等功能的一种交通管理系统。
随着人工智能技术的不断发展,人工智能被广泛应用于智能交通系统中,为交通运行提供了更精准的预测和更高效的管理。
一、智能交通系统的需求传统的交通管理方式面临诸多挑战,包括交通拥堵、交通事故、环境污染等问题。
而智能交通系统的引入可以为这些问题提供解决方案。
智能交通系统通过对交通数据进行实时监测和分析,能够提供交通拥堵状况的预测以及实时的交通指导,从而帮助车辆选择最佳的行驶路线,减少交通拥堵和行程时间。
此外,智能交通系统还可以利用人工智能技术实现交通事故的预测和预警功能,及时发现交通安全隐患,减少交通事故的发生。
同时,智能交通系统还可以优化交通信号灯的控制,分配交通资源,提高交通效率,减少能源消耗和环境污染。
二、人工智能在智能交通系统中的应用1. 交通预测与拥堵管理人工智能技术可以通过对交通数据进行实时分析,预测交通拥堵情况,并且提供最佳的交通指导。
通过深度学习等算法,智能交通系统能够识别和学习交通数据的模式,并根据历史数据和实时数据进行交通拥堵的预测和预警。
这样一来,车辆可以通过智能导航系统选择避开拥堵路段,减少行程时间和油耗。
2. 交通事故预测和预警智能交通系统可以通过机器学习等人工智能技术,对交通数据进行分析,提前发现潜在的交通事故隐患。
通过对历史交通数据和现场监控数据的比对和分析,系统可以识别交通事故发生的概率和可能性,并提供实时的交通事故预警信息,帮助驾驶员和交警采取相应措施,减少交通事故的发生率。
3. 交通信号灯优化控制利用人工智能技术,智能交通系统可以实现交通信号灯的智能化控制。
通过对交通数据的实时监控和分析,系统可以根据车流量和路况变化,动态调整信号灯的配时方案,以优化交通信号灯的控制效果。
智能车辆自动驾驶系统技术研究与应用
智能车辆自动驾驶系统技术研究与应用自动驾驶技术是近年来快速发展的一个领域,旨在实现车辆完全自主地行驶,不需要人工干预。
智能车辆自动驾驶系统作为实现这一目标的关键技术,已经引起了广泛的关注和研究。
本文将就智能车辆自动驾驶系统的技术研究与应用进行探讨。
智能车辆自动驾驶系统基本构成智能车辆自动驾驶系统由多个技术模块组成,包括感知模块、决策模块和控制模块。
感知模块负责感知车辆周围环境的信息,采用传感器等设备获取并处理图像、声音和其他传感器数据。
常用的传感器包括激光雷达、摄像头、毫米波雷达和超声波传感器等。
这些传感器通过不同的方式感知车辆周围的物体、行人、道路和障碍物等。
决策模块根据感知模块提供的数据进行分析和处理,形成对路况的判断和决策。
这些判断和决策可能包括车辆行驶的速度、远近程预测、车道选择以及超车等行为。
决策模块通常使用计算机视觉和机器学习等技术,以实时且准确地评估周围环境并作出智能决策。
控制模块负责控制车辆的加速、刹车、转向和换挡等操作,以实现自主驾驶。
控制模块通常由电子控制单元(ECU)和执行器组成,ECU根据决策模块的指令控制执行器完成相应的操作。
智能车辆自动驾驶系统关键技术在实现智能车辆自动驾驶系统过程中,有几项关键技术不可或缺。
首先是车辆感知技术。
车辆感知技术是实现自动驾驶系统的基础,它能够准确地感知并理解周围环境。
激光雷达、摄像头和雷达等传感器被广泛应用于车辆感知技术中。
激光雷达通过测量物体的距离和方向来获取环境信息,摄像头则通过图像识别和处理来感知道路和障碍物,雷达可以提供较高的精度和覆盖范围。
通过这些传感器的应用,车辆能够实时感知和理解周围的动态环境,从而做出相应的决策。
其次是车辆决策技术。
车辆决策技术是指智能车辆自动驾驶系统根据感知模块提供的信息来作出相应决策的能力。
决策技术可以通过深度学习、强化学习和规划算法等来实现。
深度学习技术可以用于图像识别和目标检测,以识别道路、交通标志和行人等;强化学习技术可以优化车辆行驶策略,确保车辆在不同情况下作出最佳决策;规划算法则可以根据当前车辆的状态和路况,确定最佳行驶路径和速度。
开题报告《人工智能在自动驾驶车辆中的应用研究》

开题报告《人工智能在自动驾驶车辆中的应用研究》一、研究背景随着人工智能技术的不断发展和普及,自动驾驶技术作为人工智能在交通领域的重要应用之一,受到了广泛关注。
自动驾驶车辆的出现将极大地改变人们出行的方式,提高交通效率,减少交通事故,同时也带来了许多新的挑战和问题。
因此,对人工智能在自动驾驶车辆中的应用进行深入研究具有重要意义。
二、研究目的本研究旨在探讨人工智能在自动驾驶车辆中的具体应用,分析其在提升车辆自主性、提高行车安全性、优化路况感知等方面的作用,为进一步推动自动驾驶技术的发展提供理论支持和实践指导。
三、研究内容自动驾驶技术概述:介绍自动驾驶技术的发展历程、技术原理和应用现状。
人工智能在自动驾驶中的关键技术:深度学习、计算机视觉、传感器融合等关键技术在自动驾驶中的应用及优势。
自动驾驶车辆行为决策:探讨人工智能如何帮助车辆做出行为决策,包括避障、规划最优路径等方面。
车辆与环境感知:分析人工智能在车辆感知环境、识别交通标志、检测道路障碍物等方面的应用。
自动驾驶技术挑战与展望:总结当前自动驾驶技术面临的挑战,并展望未来发展方向。
四、研究方法本研究将采用文献综述和案例分析相结合的方法,通过查阅相关文献资料,分析已有案例数据,对人工智能在自动驾驶车辆中的应用进行系统整理和总结。
五、预期成果通过本研究,预计可以深入了解人工智能在自动驾驶车辆中的应用现状和发展趋势,为相关领域研究者提供参考和借鉴。
同时,也将为推动自动驾驶技术的进一步发展和完善提供理论支持和实践指导。
以上是本开题报告《人工智能在自动驾驶车辆中的应用研究》的内容概要,后续将进一步深入探讨各个方面的具体内容,以期取得更加丰硕的研究成果。
汽车行业智能驾驶辅助系统解决方案

汽车行业智能驾驶辅助系统解决方案第一章智能驾驶辅助系统概述 (2)1.1 智能驾驶辅助系统定义 (2)1.2 智能驾驶辅助系统发展历程 (2)1.3 智能驾驶辅助系统分类 (3)第二章感知技术 (3)2.1 激光雷达技术 (3)2.2 摄像头技术 (4)2.3 超声波传感器技术 (4)2.4 融合感知技术 (5)第三章控制策略 (5)3.1 自适应巡航控制 (5)3.2 自动紧急制动系统 (5)3.3 自动泊车系统 (6)3.4 车道保持辅助系统 (6)第四章通信技术 (6)4.1 车载通信技术 (6)4.1.1 车载通信网络架构 (6)4.1.2 车载通信协议 (7)4.2 车联网通信技术 (7)4.2.1 车联网通信技术分类 (7)4.2.2 车联网通信技术特点 (7)4.3 车辆与基础设施通信技术 (7)4.3.1 车辆与基础设施通信技术分类 (8)4.3.2 车辆与基础设施通信技术特点 (8)第五章数据处理与分析 (8)5.1 数据采集与预处理 (8)5.2 数据融合与处理 (9)5.3 数据挖掘与分析 (9)第六章系统集成与测试 (9)6.1 系统集成设计 (10)6.1.1 子系统划分 (10)6.1.2 接口设计 (10)6.1.3 系统集成框架 (10)6.2 系统测试方法 (10)6.2.1 单元测试 (10)6.2.2 集成测试 (10)6.2.3 系统测试 (11)6.3 测试场地与设备 (11)6.3.1 测试场地 (11)6.3.2 测试设备 (11)第七章安全性与可靠性 (11)7.1 安全性设计原则 (11)7.1.1 引言 (11)7.1.2 安全性设计原则概述 (11)7.2 可靠性评估方法 (12)7.2.1 引言 (12)7.2.2 可靠性评估方法概述 (12)7.3 安全性与可靠性测试 (12)7.3.1 引言 (12)7.3.2 安全性测试 (12)7.3.3 可靠性测试 (13)第八章法规与标准 (13)8.1 智能驾驶辅助系统法规概述 (13)8.2 智能驾驶辅助系统标准制定 (13)8.3 国内外法规与标准对比 (14)第九章市场与发展趋势 (14)9.1 智能驾驶辅助系统市场现状 (14)9.2 市场竞争格局 (14)9.3 发展趋势与机遇 (15)第十章应用案例与前景展望 (15)10.1 典型应用案例 (15)10.1.1 自动紧急制动系统 (15)10.1.2 车道偏离预警系统 (15)10.1.3 自动泊车系统 (15)10.2 智能驾驶辅助系统发展前景 (16)10.3 面临的挑战与应对策略 (16)10.3.1 数据处理与分析 (16)10.3.2 系统安全与隐私保护 (16)10.3.3 标准法规与市场推广 (16)第一章智能驾驶辅助系统概述1.1 智能驾驶辅助系统定义智能驾驶辅助系统是指在车辆行驶过程中,通过搭载的传感器、控制器、执行器等硬件设备,结合先进的计算机视觉、人工智能、大数据等技术,实现对车辆行驶状态的实时监测、智能分析和辅助控制,以提高驾驶安全性、舒适性和效率的一套系统。
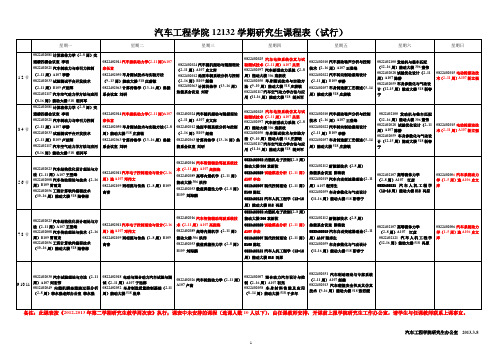
吉林大学2012汽车工程学院12132学期研究生课程表(试行)
星期一
星期二
星期三
星期四
星期五
星期六
星期日
1.2节
0822402081计算流体力学(2~8周)交通楼四楼会议室李明
0822402021汽车制动力与牵引力控制(2~11周)A107李静
0822402033试验测试平台开发技术(2~11周)B109卢延辉
0822402117汽车空气动力学方法与应用(8-16周)能动大楼518胡兴军
0822402117汽车空气动力学方法与应用(8-16周)能动大楼518胡兴军
0822402014汽车操纵动力学(2~11周)A107
宗长富
0822402050车身测试技术与实验方法(2~8周)能动大楼518庄蔚敏
0822402063计算传热学(13~16周)热能系会议室刘研
0822402024汽车随学(2~11周)A107
宗长富
0822402050车身测试技术与实验方法(9~13周)能动大楼518庄蔚敏
0822402063计算传热学(13~16周)热能系会议室刘研
0822402024汽车随分析与控制(2~16周)B109赵健
0822402029试验模态分析(2~11周)A107李杰
0812402007现代控制理论(2~11周)B109陈虹
0822402121汽车人机工程学(12-16周)能动大楼518冯原
0822402112新能源技术(2-8周)
热能系会议室陈海波
0822402019汽车自动变速器理论(2~11周)A107程秀生
0822402010汽车振动噪声分析与控制技术(2~16周)A107王登峰
0822402022汽车转向制动悬架设计(2~11周)B109李静
车辆智能驾驶系统的设计与开发
车辆智能驾驶系统的设计与开发近年来,随着科技的快速发展,智能驾驶系统成为了汽车行业的热门话题。
随着人们对交通安全和行车便利性的需求日益增加,车辆智能驾驶系统的设计与开发也愈加重要。
一、车辆智能驾驶系统的概述车辆智能驾驶系统是一种基于先进科技和传感器控制技术的自动驾驶系统,它能够通过计算机自主地规划和执行车辆的行驶路径、控制车辆的行驶速度、识别路况和车辆周围环境,从而达到无人驾驶的效果。
目前,已有多家国内外汽车制造商投入大量资金和人力资源,进行车辆智能驾驶系统的研发和推广。
二、车辆智能驾驶系统的设计原理车辆智能驾驶系统的设计原理主要分为以下几个方面:1.立体感知系统车辆智能驾驶系统通过激光雷达、毫米波雷达和摄像头等传感器,实现车辆对周围环境的三维感知。
立体感知系统可以有效地识别车辆、行人、路标、交通信号灯和障碍物等,并对车辆的行驶路径进行规划和调整。
2.路径规划系统车辆智能驾驶系统通过高精度地图、车辆导航信息和车辆传感器等技术,实现路线规划和路径决策功能。
路径规划系统能够预测车辆的行驶路线、速度和转向等参数,并进行相应的控制和调整。
3.车辆控制系统车辆智能驾驶系统通过电动机、传动系统和刹车系统等技术,实现车辆的自动驾驶控制。
车辆控制系统能够识别车辆当前的行驶状态和路况,并自动进行巡航、转向和制动等控制操作。
三、车辆智能驾驶系统的开发流程车辆智能驾驶系统的开发流程通常包括以下几个阶段:1.系统分析阶段车辆智能驾驶系统的开发需要充分分析车辆的性能和行驶特点,明确智能驾驶系统的应用场景和技术需求,制定相应的技术方案和开发计划。
2.系统设计阶段车辆智能驾驶系统的设计需要充分考虑传感器、控制器和计算机等硬件设备的集成和协同工作,以及软件算法和数据接口的优化和完善。
3.系统开发阶段车辆智能驾驶系统的开发需要进行模型建立、算法实现和电路调试等工作,以完成系统的功能开发和性能优化。
4.系统测试阶段车辆智能驾驶系统的测试需要进行功能测试、性能测试和安全测试等多个方面,以确保系统的稳定性、可靠性和安全性。
汽车驾驶辅助系统的发展和应用

汽车驾驶辅助系统的发展和应用近年来,随着科技不断发展,汽车行业也在不断推陈出新,特别是汽车驾驶辅助系统的发展和应用。
汽车驾驶辅助系统是指通过使用车载智能硬件设备和软件系统,帮助司机实现驾驶过程中的某些辅助功能,提升驾驶的安全性和舒适性。
本文将介绍汽车驾驶辅助系统的发展历程、现状及未来发展趋势。
1. 汽车驾驶辅助系统的发展历程早在上世纪80年代,汽车驾驶辅助系统就已经开始了初步的研发,主要集中在自动驾驶技术方面的探索。
1995年,美国国防部资助开发了一款名为“达尔文”(DARPA)的无人驾驶军用车。
这是全球第一辆自动驾驶汽车,被视作自动驾驶技术的先驱。
2000年,日本推出了“防止交通事故技术”(ITS)项目,这是日本政府针对交通安全所推出的广泛项目,其中包括了基于车间通信技术的车辆自组织行驶系统(VICS)、信息服务系统等多个子项目。
自那时起,自动驾驶技术在全球范围内受到了广泛关注,各车企与高科技企业加速投入自动驾驶领域的研发。
2. 汽车驾驶辅助系统的现状如今,汽车驾驶辅助系统已经成为汽车行业的主流技术之一。
从最基础的自动泊车,到高端的自动驾驶技术,汽车驾驶辅助系统的应用越来越广泛。
目前,汽车驾驶辅助系统能够实现以下几个方面的功能:(1)自动泊车:该功能能够帮助驾驶者轻松完成泊车操作,无需取下方向盘,车辆便可自动完成泊车。
(2)自适应巡航:该功能能够识别前方车辆,并且根据前方的车辆速度和距离来自动调整自己的行驶速度和距离。
(3)车道保持辅助:该功能能够识别道路两旁的标线,保证车辆行驶在正常的车道内。
(4)盲点监测系统:该功能能够检测到驾驶者无法看到的车辆,并通过声音或者视觉的方式来提示驾驶者。
(5)自动驾驶:该功能是自动驾驶技术的高端应用,能够让车辆在无人驾驶的情况下行驶,实现完全自治式的驾驶。
3. 汽车驾驶辅助系统的未来发展趋势目前,汽车驾驶辅助系统还存在着许多局限性,比如在复杂的路况下,无法完全替代人类驾驶员。
ADAS研发与测试的模拟仿真技术---吉林大学

能和产品的研发的比重已经高达70%以上-- *Automotive Wikipedia
Requirement-Driven Processes
以需求为驱动的开发流程
现代汽车技术研发先进方法、理念和流程
基于先进的研发理念
Math-Based Platforms
基于数学模型的开发平台
Model-Based Approaches
基于模型的开发方法
Requirement-Driven Processes
以需求为驱动的开发流程 先进的开发理念与流程
基于先进的研发平台
Pure Simulation
离线纯仿真平台
RT-SIL/HIL Simulation
实时、软硬件在环仿真平台
工具 技术理念、方法和流程的关键 --- Charles F. Kettering,
great American inventor, engineer & businessman
Time cover
“ 工欲善其事必先利其器 ”--- 孔子《论语·魏灵公》
1933
自上世纪90年代起,模拟仿真和数字虚拟化技术已经成为了 汽车研发过程
大雾天气
为什么模拟与仿真? 成本需求
基于模拟仿真技术的虚拟研发是 节省研发成本的关键途径,也是 当今世界技术研发的主流趋势 $500
$5,000
相对成本
$50
$5
需求定义
模拟仿真
产品原型
产品开发
为什么模拟与仿真?技术切实可行
模拟仿真技术不仅必要、而且可能/可行
随着计算机、电子技术的成熟,数学模型的精确性和数值求 解能力的不断提高:数学模型也越来越接近真实的物理世界: 车辆动力学模拟 环境模拟(道路、交通与天气等) 环境传感模拟(虚拟相机、雷达和无线通信等) 驾驶员模拟
先进驾驶辅助技术的研究与应用

先进驾驶辅助技术的研究与应用一、介绍随着汽车保有量的增加和公路交通的不断发展,交通安全成为政府和人民关注的重要问题。
先进驾驶辅助技术的研究与应用可以提高驾驶员的安全性能,降低交通事故率和伤亡人数,是解决交通安全问题的重要手段。
在此背景下,全球汽车行业的研发机构和厂商正在加速研究和开发先进驾驶辅助技术。
二、先进驾驶辅助技术的种类1、自动灯光开关技术自动灯光开关技术是一种智能化的驾驶辅助技术,它可以根据天气、光线和道路状况自动调节车灯亮度。
这项技术可以减轻驾驶员疲劳程度和提高行车安全性。
2、自适应巡航控制技术自适应巡航控制技术可以让汽车自动跟随前车行驶,保持与前车的安全距离,这种技术可以减少驾驶员的疲劳度,并大幅降低交通事故的概率,提高高速公路的交通流量。
3、车道保持辅助技术车道保持辅助技术可以通过摄像头和雷达传感器监测车道线的位置和车辆的位置,从而帮助驾驶员保持车辆在车道线内行驶。
一但车辆偏离车道线,系统会自动纠正。
4、前方危险预警技术前方危险预警技术可以通过摄像头和雷达传感器检测前方车辆、障碍物和行人,并对驾驶员进行警告。
这项技术可以提醒驾驶员提高警惕和注意力,避免事故发生。
三、技术应用案例1、特斯拉汽车的自动驾驶技术特斯拉汽车的自动驾驶技术是一种全面自动驾驶辅助技术,它可以通过车载计算机和多个摄像头、超声波传感器、激光雷达等多种传感器对车辆周围环境进行全面监测和分析,实现自动驾驶和自动刹车等功能。
2、宝马汽车的智能座舱技术宝马汽车的智能座舱技术可以通过车载相机监测驾驶员的情绪和疲劳程度,以便提供更好的驾驶体验。
此外,它还可以通过智能语音识别和手势控制等先进技术实现驾驶员与车联网的紧密连接,为驾驶员提供智能化的驾驶体验。
四、技术发展趋势1、更加智能化随着人工智能技术的快速发展,先进驾驶辅助技术将会越来越智能化。
未来的汽车将可以通过语音识别和人机交互等技术与驾驶员进行更为智能和自然的交互。
2、更加安全化新一代的先进驾驶辅助技术将会更加关注人身安全和交通安全。
高速路换道意图参数提取及意图阶段确定
高速路换道意图参数提取及意图阶段确定任园园,赵兰,郑雪莲†,李显生(吉林大学交通学院,吉林长春130022)摘要:针对换道意图辨识研究中的意图表征参数选择与意图阶段确定问题,提出一种新的组合方法.在驾驶模拟器所得原始参数基础上,从参数重要度与相关性角度,使用决策树C4.5算法和皮尔逊相关性分析,最终得到以方向盘转角、车道偏离量和横摆角加速度组成的重要度高且互相关性低的换道意图表征参数组.在此基础上,对方向盘转角和车道偏离量的时间序列进行K-means 聚类,确定驾驶人换道意图阶段,并得出意图阶段长度与平均车速近似线性相关,且左换道意图阶段长度大于右换道意图阶段长度.最后,建立连续高斯隐马尔可夫模型,在所得意图表征参数组及意图阶段数据的基础上,训练换道意图识别模型及车道保持识别模型.模型的平均离线识别准确率为90%.并可在左换道开始前1.5s 判断出驾驶人左换道意图,右换道开始前1.4s 判断出驾驶人右换道意图.研究结果表明:基于所得的意图表征参数组及意图阶段所建立的意图识别模型可有效识别驾驶人换道意图,且识别精度较高,时序性较强.该方法可为意图识别研究中意图参数选取及意图阶段确定提供参考.关键词:驾驶行为;意图参数提取;决策树C4.5算法;意图阶段确定;K-means ;换道意图识别中图分类号:U491文献标志码:ALane Change Intention Parameter Selection and Intention StageDetermination on the HighwayREN Yuanyuan ,ZHAO Lan ,ZHENG Xuelian †,LI Xiansheng(School of Transportation ,Jilin University ,Changchun 130022,China )Abstract :Aiming at the problem of parameter selection and intention stage determination of intention represen -tation in lane change intention identification ,a new combined method is proposed.On the basis of the original param -eters obtained from the driving simulator ,the C4.5decision tree algorithm and Pearson correlation analysis are used to obtain the parameter group which is composed of steering wheel angle ,lane departure and yaw acceleration with high importance and low correlation.On this basis ,K-means clustering is applied to the time series of steering wheel angle and lane departure to determine the driver's lane change intention stage.It is concluded that the length of inten -tion stage is approximately linear related to the average speed ,and the length of left lane change intention stage is larger than that of right lane change intention stage.Finally ,the continuous Gaussian hidden Markov model is estab -lished ,and the lane change intention recognition model and lane keeping recognition model are trained on the basis 收稿日期:2020-09-22基金项目:国家重点研发计划(2018YFB1600502),National Key R&D Program of China (2018YFB1600502)作者简介:任园园(1982—),女,吉林长春人,吉林大学副教授,博士†通信联系人,E-mail :********************.cn*第48卷第2期2021年2月湖南大学学报(自然科学版)Journal of Hunan University (Natural Sciences )Vol.48,No.2Feb.2021DOI :10.16339/ki.hdxbzkb.2021.02.002文章编号:1674—2974(2021)02—0010—11任园园等:高速路换道意图参数提取及意图阶段确定随着汽车智能化发展,高级辅助驾驶系统(Ad-vanced Driver Assistance System,ADAS)被逐渐应用于车辆驾驶中以提高驾驶安全.ADAS系统唯有理解驾驶人的意图及动作,才能更好地提供辅助及协作控制策略[1].近年来,驾驶意图辨识的研究越来越多,机器学习作为主流方法之一,被较多研究学者所使用.在机器学习辨识换道意图的研究中,换道意图表征参数和换道意图阶段确定对模型的辨识效果具有重要影响,过多无用的表征参数会使模型复杂化,降低计算速度,意图阶段截取不当会混入非意图阶段信息,影响意图模型识别效果.因此,意图表征参数组的选择和意图阶段的确定对意图辨识具有重要意义.意图表征参数可被分为交通环境参数、车辆动态参数和驾驶人行为参数三大类[2].对于具体的意图表征参数选取,现有研究常见提取方法有研究者观察选定、统计学分析差异性、分类器验证三种. Salvucci等基于驾驶模拟器实验,分析8位驾驶人的384次指定换道实验数据,发现驾驶人换道前伴随轻微减速,且意图阶段驾驶人对后视镜的关注明显高于车道保持阶段,因此认为车速及驾驶人视觉特性可以表征驾驶人换道意图[3].李创以NGSIM数据集作为数据依托,认为横向运动变化规律可以很好地区分车道保持和左右换道三种驾驶行为,选择前车与其初始所在车道左侧车道线的距离、前车的横向速度以及纵向速度作为观测变量[4].以上为研究者通过观察参数在不同驾驶阶段的差异性后确定意图表征参数.除此之外,侯海晶基于驾驶人视觉特性,采用独立样本T检验,分析驾驶人在左、右换道和车道保持阶段的视觉特性差异,确定驾驶人意图表征参数组[5].毕胜强等人对人-车-路参数构造不同组合,通过分类器验证各组合的分类性能,确定包含人-车-路三者信息的参数组合最优[6].以上学者采用不同方式选取了人车路不同方面的参数用于意图辨识.为降低模型计算复杂度,提升模型精度,本文从参数重要度及相关性角度,选取在意图辨识中重要度高且互相关性低的参数.在换道意图辨识研究中,意图阶段数据是驾驶人意图的重要表征.常用意图阶段确定方式有两种:一种是通过确定意图起、终点得到意图阶段数据,另一种是确定换道开始点并反向截取一个固定长度得到意图阶段数据.在意图起终点确定意图阶段的方式中,意图起终点多是由观察者观察视频或分析参数变化确定.Kiefer等人提出将驾驶人开启一侧转向灯或第一次注视后视镜作为换道意图的起点,将驾驶人为完成换道首次转动方向盘为换道意图的终点,二者差值即为换道意图阶段[7].长安大学袁伟、马勇、彭金栓等人基于实车实验数据,以驾驶人首次关注后视镜与横向位置显著变化时刻的时间差为换道意图阶段,经统计得到驾驶人换道意图阶段长度为5s[8-10].冯杰以驾驶人首次关注后视镜与方向盘转角发生变化的时间差为意图阶段,同时,得出冲动型、普通型和谨慎型驾驶人的意图阶段分别为2s、3s、5s[11].侯海晶、Kuge等人均提取从直行到方向盘转角出现第一个峰值之前的数据作为意图阶段[12-13].对于第二种换道开始点结合固定长度截取意图阶段数据的方法,换道开始点多由单指标或多指标确定,而意图阶段长度多由参数分析、对比试验获得,宽度不一.其中美国NTHSA报告根据8667次车道变换样本的深入分析发现,换道前3s左右足够捕捉驾驶人的视觉搜索规律,确定3s为换道意图阶段长度[14];霍克观看218次试验换道录像发现驾驶员产生意图到实施动作一般要6s,故确定换道决策阶段为车道变换前6s[15].Doshi等人根据视觉特性,分别选取意of intention representation parameter group and intention stage data.The average off-line recognition accuracy of the model is90%.The driver's left lane change intention can be judged1.5s before the start of left lane change,and1.4 s before the start of right lane change.The results show that the intention recognition model based on the intention representation parameters and intention stage can effectively identify the driver's lane changing intention,and the recognition accuracy is high and the timing is strong.This method can provide reference for intention parameter selec-tion and intention stage determination in intention recognition research.Key words:driving behavior;intention parameter selection;decision tree C4.5;intention stage determination;K-means determination;lane-changing intention recognition第2期11图阶段为2s 和3s 进行识别比较,发现提前2s 的识别成功率高于3s [16].Fitch 等人将驾驶员注视划分区域,通过对比意图阶段长度为8s 和3s 内驾驶员的视觉区域注视规律,得3s 左右可见视觉区域有明显差异且设为意图阶段[17].综上,现有的意图阶段确定方式大多建立在视频观察、数据统计分析和试验对比的基础上,易受研究者主观因素的影响,且均用一个固定长度来描述意图阶段.在换道意图研究中,意图阶段易受驾驶人因素影响,换道样本间的意图阶段的位置与长度存在差异,并不完全相同,在此基础上,本文提出一个基于聚类的意图阶段提取方法,在减少研究者主观因素的同时,对每个换道样本单独提取意图阶段数据.本研究从驾驶模拟器换道数据入手,提出一种换道意图表征参数选择和意图阶段确定方法,并建立高斯隐马尔可夫模型进行高速路换道意图辨识.论文研究成果可以为意图识别研究中意图表征参数的选取及意图阶段的确定提供参考,更准确高效地辨识换道意图.1试验设计及数据处理1.1试验平台试验使用交通运输部公路科学研究所(RIOS )研发的RADS 型8自由度全景驾驶模拟系统(图1)采集驾驶模拟器数据.该驾驶模拟系统主要由6DOF 、Yaw-Table 、Vibration 、X-Table 、客舱、多通道投影系统、声响系统、电源系统及其他辅助系统构成,可通过UC-win/Road 软件快速进行三维道路建模和交通模拟,并采用Carsim 车辆动力学软件对车辆动力学参数进行模拟.此外,系统可外接Facelab/Tobii 等眼动系统以及多导心生理采集系统,以实现人车路环境多维参数的采集.图1RADS 型8自由度全景驾驶模拟系统Fig.1RADS 8DOF panoramic driving simulation system1.2试验场景与实验人员试验场景涵盖城市路段和高架快速路段两种类型,全程10.35km ,共包含11个弯道路段,最小转弯半径为100m ,最大转弯半径为300m.道路形式包含两种,分别为双向双车道和双向四车道,高架快速路车道宽度均为3.25m [18].该研究主要为高速路段驾驶人换道意图辨识,故只选择试验路线中间部分高架路段数据.场景如图2所示,主要包括路边建筑物、路边树木及其他机动车辆,其他机动车辆的运动状态为自由设定.被试驾驶员在实验中,均按照个人的驾驶习惯按预先设定的路线进行自由驾驶,自主换道.图2试验场景Fig.2Experimental scenario试验共选取了17名被试驾驶人,其中女性驾驶人6名,男性驾驶人11名.所选驾驶人均身体健康,无视觉、听觉、心脑血管等疾病.被试基本信息表如表1所示.试验开始前让所有被试驾驶人充分熟悉驾驶仿真平台,每个驾驶人要求以80km/h 到120km/h 的车速完成整个试验.表1参与实验驾驶人基本信息Tab.1Basic information of the experimental driver年龄/a驾龄/a范围28~50范围0~12平均值29.79平均值7.57标准差2.694标准差3.2751.3数据采集与预处理该驾驶模拟系统可同时采集车辆运行状态参数、交通流环境参数、驾驶人眼动行为以及心生理状态,可同时输出123个不同的动态参数,采样频率为60Hz ,与研究相关的参数有22个,如表2所示.其中与车辆运行状态相关参数有16个,与车辆位置相关参数有6个.在驾驶模拟实验过程中,由于驾驶人操作失误或设备本身等原因,导致异常或丢失数据的产生,最终采用其中14个驾驶人试验数据进行研究,利用滑动平均值算法对数据进行滤波处理.湖南大学学报(自然科学版)2021年12表2初始参数Tab.2Initial parameters序号参数说明1δs方向盘转角,左转为负右转为正,(°)2Δx1ane车道偏离量,车辆纵向中心线与当前车道中心线的距离.车辆在右为正;车辆在左为负,m3Δx road道路偏离量,车辆纵向中心线同整条道路(两个行驶方向)的中心线之间的距离,m4a p加速踏板开度,没踩,0;踩死,15b p制动踏板开度,没踩,0;踩死,16θyaw横摆角,车辆x轴与正北方向的夹角(向北为0,逆时针为正),rad7θpitch俯仰角,绕车辆y轴的旋转角度,rad8θroll侧倾角,绕车辆x轴的旋转角度,rad9d rbd车辆纵向中心线到行驶方向全部车道的最右端的距离,m10d lbd车辆纵向中心线到行驶方向全部车道的最左端的距离,m11n rpm发动机转速,r/min12v车辆合速度,m/s13v x车辆纵向速度,m/s14v y车辆横向速度,m/s15a x车辆纵向加速度,m/s216a y车辆侧向加速度,m/s217d x车辆前轴中点在x轴行进方向18d y车辆前轴中点在y轴行进方向19r yaw横摆角速度,rad/s20r roll侧倾角速度,rad/s21a yaw横摆角加速度,rad/s222a roll侧倾角加速度,rad/s2本研究定位于换道意图的辨识,在不知具体换道意图阶段的位置时,本文截取从车辆尚处于直行状态到车辆越过车道线的时间段为最初研究样本,可以确定此方式截取的样本必定包含换道意图阶段,具体截取示例如图3所示.车辆横向位置轨迹与车道线的交点对应时间为车辆跨过车道线的时刻T lc,以此往前推,找到车辆直行状态末期T lk,截取T lk 与T lc之间的数据段用于下文换道意图参数及换道意图阶段确定.采用MATLAB中findpeaks函数寻找到峰值点,该点为局部最大值,为保证所选换道片段不缺失有效数据,从峰值点处往前2s作为车辆直行阶段末期T lk.以此方式最终获取180组有效样本,包括换道样本112组(左换道62组、右换道50组)和车道保持68组.所有有效样本将被分为两部分:训练样本和验证样本,比例约为2∶1.7654321016081610161216141616时间序列T直行T lk峰值点越线时间T lc车辆横向位置车道线车道中心线2s时间/s(a)左换道样本截取示意图164916511653165516577654321时间序列T直行T lk峰值点越线时间T lc车辆横向位置车道线车道中心线2s时间/s(b)右换道样本截取示意图图3样本截取示例Fig.3Sample extraction example2换道意图表征参数的选取换道意图辨识研究中,表征意图的参数众多,为减少模型计算复杂度,需要筛选出对区分换道意图重要度较高的换道意图表征参数.本文基于决策树原理进行重要参数的选择.选择决策树算法时,考虑到参数的统计特征取值较多及统计特征之间取值数目不同,选择了可以分裂为多叉树的C4.5算法进行参数统计特征重要度分析.在进行换道意图表征参数选取时,首先基于C4.5算法计算参数统计特征的信息增益率GR(Gain Ratio),初步筛选出一组参数,然后进行皮尔逊相关性分析,逐步剔除掉互相关性任园园等:高速路换道意图参数提取及意图阶段确定第2期13高的参数,最终得到在意图分类方面重要度高且互相关性低的意图表征参数组.2.1参数统计值构造在上节提取的22个参数、180组有效样本中,从每个参数的时间序列中构造对应参数的9个统计特征,分别为平均值、众数、最大值、最小值、25%分位数、中位数、75%分位数、标准差、方差,22个参数共计198个统计特征.鉴于此处参数的时间序列较短,均值、最值、中位数、方差、百分位数等统计值可以大致反映时间序列的变化趋势,故本文采用时间序列的统计特征来表示时间序列,通过分析参数时间序列对应的统计特征的重要度,反映参数的重要度. 2.2基于C4.5算法的参数重要度分析C4.5算法采用信息增益率作为特征选择指标,信息增益率越大,分裂后的集合有序程度越高,特征的分类效果越好.C4.5算法进行特征重要度分析流程如图4所示,图中特征A代表198个统计特征中的任意一个.A{a1,a2,…}B{b1,b2,…}样本集D的信息熵样本集D Inf D特征AD1D2…D j…A2…A j…D V据A分类后样本集D的信息熵Inf A,DA1A V以A为随机变量的D的信息熵SplitInf A,D图4C4.5算法特征分析Fig.4Feature analysis of C4.5algorithm首先,每个换道样本有198个特征,将180组包含左换道、右换道和直行三类样本的特征集作为样本集D,用信息熵Inf D来描述样本集合D的不确定度.Inf D=-m i=1∑D i D log2D i D()(1)然后以特征A为依据将样本集D分为v类,此时样本集的信息熵为Inf A,D.Inf A,D=v j=1∑D i D×Inf D j(2)利用特征A对样本集合D进行划分所得到的信息增益为G A,信息增益越大,集合D的不确定度下降越多.G A=Inf D-Inf A,D(3)但是,使用信息增益评价一个特征的分类性能存在缺点:信息增益偏向于选择取值较多的特征,容易过拟合.因此,在信息增益的基础上,除以分裂信息SplitInf A,D[19],得到信息增益率GR A.GR A=G A SplitInf A,D(4)把22个参数所构造的198个统计特征的信息增益率按由高到低排序如表3所示.表3参数统计特征的信息增益率排序Tab.3Order of gain ratio in parameterstatistical characteristics序号参数名称信息增益率归一化1横摆角加速度中位数(a yaw_m)0.0282 1.0000 2车辆侧向加速度均值(a y_mean)0.02760.9799 3横摆角加速度均值(a yaw_mean)0.02750.9749 4方向盘转角25%分位(啄s_p75)0.02730.9691 5横摆角速度均值(r yaw_mean)0.02370.8406 6侧倾角速度中位数(r roll_mean)0.02300.8149 7车辆侧向加速度75%分位(a y_p75)0.02080.7365 8车辆侧向加速度标准差(a y_std)0.02020.7165 9横摆角速度75%分位(r yaw_p75)0.01980.7014 10侧倾角速度75%分位(r roll_p75)0.01970.6998 11道路偏离量标准差(Δx road_std)0.01970.6990 12道路偏离量协方差(Δx road_cov)0.01960.6949……….. 197加速踏板开度均值(a p_mean)00 198制动踏板开度最小值(b p_min)00为获取重要度较高的参数,将每个参数的9个统计特征的信息增益率排名表示为一个箱线图.图5为198个参数统计特征的信息增益率排名对应的箱线图,横轴为表2中参与重要度排序的22个参数,纵轴为参数统计特征信息增益率排名.箱线图中每个箱子都可以代表对应参数的9个统计特征的信息增益率排名情况,中间线表示信息增益率排名100的位置,线以下的10个箱子,即为信息增益率排名前10的参数,分别是方向盘转角、侧向加速度、横摆角速度、侧倾角速度、横摆角加速度、车道偏离量、侧倾角、车辆距离左、右边界的距离和道路偏离量.将以上参数的统计特征作为决策树的分裂节点,进行原始数据的分裂,分裂后的数据集,信息增益率大,混乱程度降低明显,反映出此10个参数在区分不同驾驶阶段意图时有较好的分类效果,符合意图表征参数要求,为确保各参数之间的独立性,还需要进一步分析参数之间的相关性.湖南大学学报(自然科学版)2021年142001801601401201008060402013579111315171921参与重要度排序的22个参数图5参数统计特征信息增益率排名复式箱线图Fig.5Gain ratio in parameter statisticalcharacteristics ranking’s double box line chart2.3表征参数相关性分析在上述参数中,车辆离左、右边界的距离与道路偏离量易受道路线形的影响,而本文主要研究高速路上直行后的换道,故排除以上三个参数,只对剩余7个参数做皮尔逊相关性分析,所得结果如表4所示.表4参数的皮尔逊相关性分析Tab.4Pearson correlation analysis of parameters方向盘转角横摆角速度侧向加速度横摆角加速度侧倾角速度侧倾角车道偏离量方向盘转角1-0.954-0.941-0.041-0.056-0.9330.138横摆角速度10.996-0.343-0.3250.991-0.225侧向加速度10.0470.0520.992-0.238横摆角加速度10.95-0.3890.144侧倾角速度1-0.3760.126侧倾角1-0.241车道偏离量1在显著性水平P值均小于0.05的条件下,排除掉相关系数值大于0.5,即互相关性较高的参数,剩余参数为互相关性较低的参数,分别为方向盘转角、横摆角加速度和车道偏离量.因此综合参数重要度与皮尔逊相关性分析,最终将方向盘转角、横摆角加速度和车道偏离量作为驾驶人换道意图的表征参数,为下文意图识别模型的训练提供观测层输入参数.3换道意图阶段的确定换道意图是驾驶人与周围环境交互后产生的结果.具体地说,当驾驶人对当前车道的满意程度下降,且对目标车道期望程度上升,则会形成换道意图.而具体的换道意图阶段是指,驾驶人产生换道意图时间点至驾驶人执行换道机动时的时间点,这二者之间的时间间隔.作为整个换道进程中的一部分,换道意图阶段具有位置、长度两个属性,且不同换道过程的换道意图阶段也不完全相同.本文结合车辆到达分道线前参数的阶段性变化,提出一种基于K-means聚类的换道意图阶段的截取方法,提取训练样本的换道意图阶段训练换道意图识别模型.3.1观测集与聚类个数的确定车辆换道意图表征参数中的方向盘转角和车道偏离量分别代表了驾驶人的动作与车辆的横向位置,最能直观体现车辆换道过程中的动态变化.因此,观测集为方向盘转角和车道偏离量的时间序列.车辆从直行到跨越车道线,驾驶人通过操纵方向盘实现车辆偏离,又因方向盘具有自由行程,导致方向盘转角变化较早,存在换道意图形成(预转向)到换道意图实施(正式转向)两种状态的过渡,可通过聚类算法中的最小距离准则得到换道意图形成的位置.而车道偏离量反映了车辆的横向位置,其变化晚于其他参数,可以体现换道意图(预偏离)到换道执行阶段(正式偏离)的过渡,可通过聚类算法中的最小距离准则得到换道执行阶段即意图阶段结束的位置.故将方向盘转角和车道偏离量观测集的聚类个数均定为2.考虑到驾驶人的驾驶风格会导致参数阈值多样化,而此处重点在于换道意图阶段的确定,故在不改变参数变化趋势的条件下,先对时间序列中参数值归一化后再作为K-means聚类分析的观测集.3.2基于K-means的换道意图阶段确定换道意图阶段确定方法的流程图如图6所示,基于文中1.3节所截取的换道样本,采用车辆从直行到越过车道线的方向盘转角序列和车道偏离量序列作为观测集.以左换道为例,换道过程中,方向盘转角值的变化要克服方向盘的自由行程及直行阶段方向盘的正常变化范围,此过程为换道与直行共同存在的阶段,即意图形成过程,也称预转向过程,此后的方向盘转任园园等:高速路换道意图参数提取及意图阶段确定第2期15角变化可区分直行与换道,为正式转向过程,故将方向盘转角从预转向过程到正式转向过程的分界点定为换道意图开始时刻.意图阶段开始点意图阶段结束点76543210时间序列T 直行T lk 越线时间T lc 车辆横向位置车道线车道中心线聚类个数K =2聚类个数K =2时间/s16091611161316151617-10-200-0.5-1.0-1.50-10-20178717891791时间/s 时间/s178717891791-0.5-1.0-1.5时间/s时间/s预转向意图形成正式转向意图实施预偏离意图实施正式偏离换道执行Intent start Intent end 178717891791178717891791图6换道意图阶段确定方法Fig.6Method for determining the intention stage of lane change而车道偏离量作为驾驶人操纵行为的最终表现,其变化较晚,故基于车道偏离量的聚类结果所得的意图阶段结束时刻可最大程度涵盖意图阶段信息.从安全角度,驾驶人确定换道意图后会存在换道可行性判断过程,即换道意图实施中的对换道安全的考量过程,此时车道偏离量为预偏离过程,在确认换道安全后,即开始真正的换道执行动作,到达正式偏离过程.故将车道偏离量从预偏离过程到正式偏离过程的分界点定为换道意图结束时刻.单个换道样本聚类结果如图7所示,上方为方向盘转角聚类结果,下方为车道偏离量聚类结果.左换道意图阶段左换道17871788178917901791178717881789179017911.00.501.00.50从直行到车辆越过分道线的时间序列/s(a )左换道1.00.501.00.5016501651165216531654右换道意图阶段16501651165216531654右换道从直行到车辆越过分道线的时间序列/s(b )右换道图7单个样本聚类结果Fig.7Single sample clustering results按照图7的方式,对112个换道样本进行K-means 聚类,不同换道样本的方向盘转角和横向偏离量聚类后的分界点对应的时间不完全相同,符合实际换道情况.3.3K-means 聚类结果验证Sil 指标,又称轮廓系数(Silhouette Coefficient ),可评价类的密集程度与分散程度[20].Sil 指标的变化范围是[-1,1],其值越大说明聚类效果越好.表5为聚类后所有样本点的平均Sil 值,左右换道样本的方向盘转角和车道偏离量聚类后的样本点轮廓系数为0.8左右,可知本节K-means 聚类结果是合理的.表5聚类后样本点的轮廓系数Tab.5Silhouette coefficient of sample points after clustering样本方向盘转角聚类车道偏离量聚类左换道0.80010.7731右换道0.85930.85703.4换道意图阶段的分析将14个驾驶人的112段换道训练样本数据,按照上述换道意图阶段的确定方法,计算每个换道样本的意图阶段并统计所有换道样本的意图阶段长度和每位驾驶人左、右换道平均意图阶段长度,所得结果如图8和表6所示.00.51.01.52.02.53.000.51.01.52.02.53.0108642108642左换道意图阶段长度/s右换道意图阶段长度/s(a )左换道(b )右换道湖南大学学报(自然科学版)2021年16。
汽车驾驶辅助系统的研究与应用
汽车驾驶辅助系统的研究与应用第一章概述随着科技的不断发展,汽车驾驶辅助系统在现代汽车行业中变得越来越常见。
这些系统利用了最新的技术来辅助驾驶员,使他们驾驶更加安全和舒适。
汽车驾驶辅助系统的研究与应用一直是汽车工业研究的热门领域。
本文将从几个方面探讨汽车驾驶辅助系统的研究与应用。
第二章立体声视觉立体声视觉是汽车驾驶辅助系统中的重要组成部分。
它可以通过多个传感器在不同方向上捕捉图像并将其合并,使驾驶员可以获得更全面、更准确的信息,并以此来作出更好的决策。
立体声视觉技术可以被用于很多方面,例如障碍物检测、智能制动、主动巡航控制等。
这些功能可使汽车在高速公路、城市路况和狭窄路段等多种场景中更加智能化和安全。
第三章智能制动系统智能制动系统是汽车驾驶辅助系统中的另一个重要组成部分。
这种系统可以通过车载传感器来检测前方障碍物,并在必要时减速或停车以避免交通事故。
智能制动系统不仅可以在平稳的路面上发挥作用,而且可以在冰雪、雨雪等环境中实现更高的安全性。
在智能制动系统中,同样利用了立体声视觉技术,它可以对前方的障碍物进行精确地测量,并在保持安全距离的同时确定最安全的减速或停车策略。
第四章主动巡航控制主动巡航控制是一种常见的汽车驾驶辅助功能。
它可以利用多种传感器获取车辆周围的信息,并通过自主控制系统来自动调整车速以实现与周边车辆的保持安全距离。
这种系统的最大优点就是它能够在高速公路等高速环境中稳定的运行。
主动巡航控制的设计理念是以驾驶员的安全和舒适为中心。
它可以将驾驶员的注意力从车速、车间距和其他驾驶任务中释放出来,使驾驶者可以更加放松地驾驶汽车,从而减轻驾驶压力。
第五章车道保持辅助系统车道保持辅助系统是一种用于辅助驾驶人员在行驶中保持车道方向的技术,是现代汽车驾驶辅助系统领域中又一热门技术。
这种系统通常利用立体声视觉技术或车载摄像机来监视车辆的位置,并在必要时提供警告或校正措施以保持在车道中心。
与其他技术类似,车道保持辅助系统可以使驾驶者更加放心和舒适地驾驶汽车。
高级驾驶辅助系统智能算法的研究
高级驾驶辅助系统智能算法的研究随着科技的不断发展,高级驾驶辅助系统(ADAS)已经成为现代汽车的重要组成部分。
ADAS采用感知技术、智能算法和控制策略,为驾驶员提供实时的驾驶辅助功能。
其中,智能算法在ADAS中起着关键的作用,它能够处理各种传感器数据并进行决策,实现车辆的智能化控制。
本文将围绕高级驾驶辅助系统智能算法的研究展开,并重点讨论目前主要的研究方向和存在的挑战。
高级驾驶辅助系统的智能算法研究可追溯到二十世纪八十年代。
经过几十年的发展,智能算法在ADAS中的应用已经非常广泛。
其中最重要的智能算法包括计算机视觉、机器学习和深度学习等。
计算机视觉技术通过摄像头和传感器捕捉到的图像来识别交通标志、行人、车辆等,从而实现对驾驶环境的感知。
机器学习算法则通过对大量的驾驶数据进行训练,可以预测驾驶员的行为和意图,并为其提供相应的辅助控制。
深度学习算法则通过多层神经网络来模拟人脑的工作原理,可以实现对复杂驾驶场景的理解和决策。
这些智能算法的研究,为ADAS的性能和功能提供了强大的支持。
当前,高级驾驶辅助系统智能算法的研究主要集中在以下几个方面:首先,对象检测与跟踪。
对象检测与跟踪是ADAS中最关键的技术之一。
它能够通过感知和识别技术,准确地检测和跟踪驾驶环境中的行人、车辆、障碍物等重要目标,并为驾驶员提供相应的预警或控制建议。
在这方面的研究中,机器学习和深度学习算法得到了广泛应用。
通过大量的数据训练,算法可以有效地学习和识别不同类型的目标,并提高检测和跟踪的准确性。
其次,道路检测与识别。
道路检测与识别是ADAS中另一个重要的智能算法研究方向。
它能够通过图像处理和模式识别技术,快速准确地识别出驾驶场景中的道路信息,包括车道线、交叉口、标志等。
对于这一技术的研究,计算机视觉和深度学习技术是主要的工具。
通过分析图像的特征和结构,算法可以自动地识别出不同类型的道路信息,并实现对驾驶员的有效辅助。
再次,行为识别与预测。
汽车安全技术的未来发展趋势研究

汽车安全技术的未来发展趋势研究在当今社会,汽车已经成为人们生活中不可或缺的一部分。
随着科技的不断进步和人们对交通安全的日益重视,汽车安全技术也在不断创新和发展。
未来,汽车安全技术将朝着更加智能化、主动化和集成化的方向迈进,为人们的出行提供更可靠的保障。
一、智能化驾驶辅助系统的进一步完善自动驾驶技术是当前汽车行业的热门研究领域之一。
未来,智能化驾驶辅助系统将更加成熟和普及。
例如,自适应巡航控制、自动紧急制动、车道保持辅助等功能将不断优化,提高其准确性和可靠性。
自适应巡航控制将能够更好地适应复杂的交通状况,不仅可以根据前方车辆的速度自动调整车速,还能在交通拥堵时实现自动跟车,减轻驾驶员的疲劳。
自动紧急制动系统将具备更敏锐的感知能力,能够在更短的时间内检测到潜在的碰撞危险,并及时采取制动措施,避免或减轻碰撞的严重程度。
车道保持辅助系统将不仅仅是在车辆偏离车道时进行提醒和纠正,还能与其他系统协同工作,实现更加平稳和安全的车道变更。
此外,智能泊车辅助系统也将得到进一步发展,使停车变得更加轻松和安全。
二、车联网与交通安全的深度融合车联网技术将在未来的汽车安全中发挥重要作用。
通过车辆与车辆、车辆与基础设施之间的通信,实现信息的实时共享和交互。
车辆之间的通信可以让驾驶员提前了解到周围车辆的行驶状态和意图,从而更好地做出决策,避免碰撞事故的发生。
例如,当一辆车突然刹车时,其信息可以迅速传递给附近的车辆,让其他车辆有足够的时间做出反应。
车辆与基础设施的通信可以使交通信号灯、道路标识等设施与车辆进行互动。
交通信号灯可以根据车辆的流量和行驶速度进行智能调整,提高道路的通行效率和安全性。
道路标识可以向车辆发送实时的路况信息,如施工路段、事故区域等,让驾驶员提前做好准备。
三、先进的传感器技术提升感知能力为了实现更高级别的汽车安全,先进的传感器技术将不断涌现。
激光雷达、毫米波雷达、摄像头等传感器将更加精确和灵敏,能够在各种天气和光照条件下准确地感知周围环境。
智能驾驶研究报告
智能驾驶研究报告智能驾驶研究报告1. 研究背景随着科技的发展,智能驾驶正成为人们关注的热门话题。
智能驾驶是通过计算机和传感器等技术来辅助驾驶员驾驶车辆的一种新型技术。
智能驾驶通过实时监控、识别和分析周围环境以及车辆状态,自动控制车辆的加速、制动和转向等行驶操作,提高驾驶安全性和舒适性。
2. 研究内容本报告对智能驾驶技术的现状和发展进行了综述,并重点探讨了以下几个方面:2.1 感知技术感知技术是智能驾驶的核心。
通过雷达、摄像头、激光雷达等传感器,车辆可以实时感知周围的道路、车辆、行人等信息。
目前,感知技术已取得显著进展,但仍然存在一些挑战,如在复杂交通环境下准确识别障碍物。
2.2 决策与规划智能驾驶需要实时做出决策,并规划最优的行驶路径。
决策与规划涉及到交通法规、道路情况、其他车辆的行驶意图等因素的综合考虑。
目前,基于机器学习和人工智能的决策与规划方法取得了一定的成果,但仍需要进一步提高准确性和效率。
2.3 控制技术智能驾驶通过控制车辆的加速、制动和转向等操作来实现自动驾驶。
控制技术需要根据传感器收集的信息来实时调整车辆的状态,保证安全和稳定的行驶。
目前,自适应巡航控制和车道保持辅助等技术已经商用化,但自动泊车等技术仍需要进一步完善。
2.4 安全性和法律法规智能驾驶的安全性是关键问题之一。
虽然智能驾驶可以基本取代驾驶员,但仍然存在一些安全隐患,如感知技术的误判和决策与规划的不准确。
此外,智能驾驶涉及到法律法规的制定和适应,以确保驾驶过程的合法性和合规性。
3. 研究结论智能驾驶技术的发展已经取得了显著进展,但仍然面临一些挑战。
需要进一步完善感知、决策与规划、控制等关键技术,提高自动驾驶的安全性和可靠性。
此外,还需要制定和适应相关的法律法规,为智能驾驶的商业化应用提供保障。
4. 参考文献[1] 陈皎, 温得亮. 智能驾驶技术及其现状[J]. 交通科技, 2019, 11(2): 110-113.[2] 朱雪东, 张三兵, 何洁. 智能驾驶技术现状分析[J]. 自动化与仪器仪表, 2018, 07: 67-70.[3] Smith M, Apte J, sirkin R. Autonomous vehicles: Autonomous vehicles are coming. When will they be here? And what will they mean for insurance? [J]. Journal of Insurance Regulation, 2014, 33(1): 7-26.。
智能驾驶辅助系统的发展现状与未来趋势分析

智能驾驶辅助系统的发展现状与未来趋势分析随着科技的迅猛发展,智能驾驶辅助系统正逐渐成为汽车行业的热门话题。
这一系统使用了人工智能、传感器、摄像头等技术,可以帮助驾驶员更加安全、舒适地驾驶车辆。
本文将探讨智能驾驶辅助系统的发展现状以及未来的趋势。
1. 现状:智能驾驶辅助系统已取得显著进展近年来,智能驾驶辅助系统取得了许多令人瞩目的进展。
其中,自动紧急制动系统(AEB)是应用广泛的一个方面。
AEB通过前置传感器检测到前方障碍物,自动刹车避免碰撞。
此外,自适应巡航控制系统(ACC)也被广泛应用。
ACC可以根据周围车辆的速度自动调整车速,并保持与前车的安全距离。
2. 未来趋势:智能化协同驾驶系统未来的趋势是智能驾驶辅助系统向协同驾驶发展。
协同驾驶系统利用车辆间的无线通信技术,实现车辆之间的信息交流和协同行驶。
例如,当一辆车在前方遇到交通拥堵时,它可以通过通信系统将这一信息传递给后方的车辆,使得后方的车辆能够提前做出相应的调整,避免拥堵。
协同驾驶系统有望大大提高交通效率,减少交通事故的发生。
3. 智能驾驶辅助系统的挑战然而,智能驾驶辅助系统的发展面临着一些挑战。
首先是技术的复杂性。
智能驾驶辅助系统需要集成多种技术,包括人工智能、计算机视觉、传感器等,使得系统的开发和实施非常复杂。
此外,智能驾驶辅助系统还需要应对各种复杂的交通场景,如刹车、加速、变道等,使得算法的设计更加困难。
另一个挑战是法律和道德问题。
例如,当系统出现故障时,应该由谁来承担责任?这种道德和法律的问题亟待解决。
4. 解决方案:加强技术研发与法律法规制定为了克服这些挑战,我们需要加强技术研发和法律法规制定。
对于技术研发而言,我们需要进一步提高算法的精确性和智能性,以应对复杂的交通场景。
此外,我们还需要加强对传感器等技术的发展和研究,以确保辅助系统的准确性和可靠性。
在法律法规制定方面,我们需要建立相关的法律框架,明确智能驾驶辅助系统的责任和安全要求。
理想汽车的智能驾驶辅助系统研究

理想汽车的智能驾驶辅助系统研究近年来,随着科技的飞速发展,智能驾驶辅助系统在汽车行业中逐渐崭露头角。
这项技术的出现,为驾驶员提供了更为安全、便捷和舒适的驾驶体验。
本篇文章将重点探讨理想汽车的智能驾驶辅助系统研究,分析其功能和实施效果。
一、引言随着汽车工业的不断发展,人们对于驾驶的期望也不断提高。
传统的驾驶方式存在诸多隐患,如疲劳驾驶、分神驾驶等问题。
因此,研究和开发智能驾驶辅助系统成为了汽车行业的热门话题。
二、智能驾驶辅助系统的基本原理理想汽车的智能驾驶辅助系统是基于先进的传感器技术、图像识别技术、人工智能技术等,对驾驶场景进行实时监测和判断,从而实现多种功能的智能辅助。
1. 自动驾驶功能理想汽车的智能驾驶辅助系统通过激光雷达、摄像头、超声波传感器等多个传感器,对车辆周围环境进行实时感知。
通过数据处理和算法优化,系统可以实现自动巡航、自动车道保持、自动泊车等功能,大大减轻驾驶员的驾驶负担。
2. 交通标志识别功能智能驾驶辅助系统还具备交通标志识别功能。
通过摄像头或激光雷达对道路上的交通标志进行扫描和识别,并将识别结果反馈给驾驶员。
这项功能可以大大提高驾驶员对交通标志的准确性,有效地避免因疲劳或分神导致的交通事故。
3. 前方车辆预警功能该项功能可以通过车载雷达等传感器,对前方车辆的距离和速度进行实时监测并提醒驾驶员。
一旦发现紧急刹车、追尾风险等情况,系统会及时发出警告,提醒驾驶员采取相应措施,有效避免交通事故发生。
4. 车道偏离警示功能智能驾驶辅助系统通过车载摄像头等传感器,对车辆行驶的车道进行实时监测。
当驾驶员的车辆偏离车道时,系统会及时发出警示声音或振动,提醒驾驶员调整车辆位置,避免事故发生。
三、智能驾驶辅助系统的实施效果理想汽车智能驾驶辅助系统的实施效果不仅可以从安全性、舒适性和便捷性三个方面进行评估。
1. 安全性智能驾驶辅助系统能够有效地降低交通事故的发生率。
通过提供准确的交通信息和车辆状态监控,驾驶员能够更好地掌握驾驶环境,及时做出决策。
智能车辆驾驶辅助系统研究
智能车辆驾驶辅助系统研究随着科技的不断发展,智能汽车正变得越来越常见。
智能汽车包括可自动驾驶的车辆和驾驶辅助系统。
驾驶辅助系统不仅可以提高驾驶体验,还可以提高驾驶安全,成为智能汽车的一项重要技术。
本文将探讨智能车辆驾驶辅助系统的研究现状和发展趋势。
一、智能车辆驾驶辅助系统的定义智能车辆驾驶辅助系统是一种集成了传感器、计算机、通讯和控制技术的系统,可为驾驶员提供驾驶辅助、安全保护和便利功能的组合。
它可以为车辆提供跟车、刹车、超车、避撞、信息提示等服务,不仅提高了驾驶的舒适度和效率,还为驾驶员的安全提供了保障。
二、智能车辆驾驶辅助系统的技术原理智能车辆驾驶辅助系统是通过多种传感器获取路况信息,然后利用计算机和控制技术进行分析和处理,最后向驾驶员提供相关信息,完成辅助驾驶功能。
其工作原理可以简化为如下几个步骤:1、传感器:智能车辆使用多个传感器来获取道路上的各种信息,这些信息包括路面形态、障碍物、交通信号灯等。
常见的传感器有雷达、激光雷达、摄像头等。
2、数据处理:传感器获取到的信息会被传送到车辆的控制单元,由控制单元对数据进行处理,并产生相应的指令。
3、自动化控制:控制单元会发送指令给车辆的各个部件,如刹车、油门、转向等,根据检测到的道路信息,来控制车辆的移动。
4、提醒和提示:智能车辆还会通过人机交互方式向驾驶员提供道路状况的信息。
这些信息可以用来提醒驾驶员注意安全,也可以帮助驾驶员做出正确的决策以避开危险。
三、智能车辆驾驶辅助系统的应用智能车辆驾驶辅助系统已经广泛应用在汽车行业,如某些高级轿车、豪华SUV等。
在智能驾驶领域,它也是当前较为成熟的技术方向之一。
下面主要介绍几种应用:1、自适应巡航控制系统:自适应巡航控制系统是一种先进的驾驶辅助系统,它可以根据车距和速度自主地控制车辆的速度和停车。
当车辆跟前的车辆变慢时,车辆会自动减速直到保持安全距离。
2、车道偏移预警系统:方向盘振动技术,可在驾驶员不注意时发出警告,以提醒驾驶员校正驾驶方向和保持在车道中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
22
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
三、研究技术内涵
23
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
三、研究技术内涵
辅助驾驶系统相对于实现了熟练驾驶员操纵行为,等同于一个完善的环境信 息感知+完美不犯错误的驾驶行为规划决策+精确的汽车侧纵向自动控制
熟练驾驶员可以很 好地处理汽车驾驶 中的信息感知和行 为决策
2013年北美国际车展:防碰撞成为热点
25
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
四、最新研究进展 -仿人行为的技术路线与 驾驶员个性化行为研究-
26
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
四、最新研究进展
研究的主流技术路线-仿真实驾驶员行为
定位于从模拟人的信息认知处理机制角度出发,研究无人驾驶车辆的 信息感知(信息领域)、局部路径规划和动力学控制问题 模拟驾驶员在动态不确定性道路交通环境中对交通环境信息的选择性 注意机制、对汽车未来运动学特性和动力学特性的前视预瞄特点和对 未来行驶路径的多目标决策行为 建立包括道路交通环境建模、汽车未来行驶轨迹估计和局部路径多目 标决策、侧纵向动力学控制在内的无人驾驶车辆的仿驾驶员行为的智 能控制算法 开展智能辅助驾驶系统的自适应人机交互界面设计 • 综合考虑安全性、合法性、舒适性和工效性等行驶性能 • 具有高可靠性、高乘员接受性和与真实驾驶员行为的高一致性 采用现有产品车的底盘电控系统,实现侧纵向运动学和动力学的自动 控制,开发无人驾驶车辆集成验证平台,开展辅助驾驶功能测试
Multi-Objective Decision Making of Optimal Preview Acceleration
Control Correction of Vehicle Dynamics 基于汽车动力学的侧纵 向控制校正 Self-Tuning Control of Driver Understanding of Vehicle Dynamics 基于驾驶员对汽车 动力学学习和掌握 的自校正控制 Steering Angle/Displacem ent of Throttle or Brake 预期的方向盘转角/ 油门或制动踏板位移
Driving Handling Action 控制动作执行 Neural and Action Delay 驾驶员神经反 应和动作反应 滞后 Operation of Steering/ Running/ Braking from Driver hand and feet 手足操纵动作
29
Road Traffic Environment/
驾驶员感官系统延伸:摄像头、雷达、GPS、 道路设施定位等
驾驶员心理预测判断行为的数 学建模及电控单元实现 驾驶员手脚执行动作的精确 化与快速化实现
底盘电控 可施加主动控制
24 汽车智能辅助驾驶系统研究与发展 吉大汽车高振海 2014年3月20日
三、研究技术内涵
日本丰田的智能辅助驾驶研究技术研发模式与目标
9
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
二、研究发展现状
10 提供辅助控制 5 1
0
1
5
Time(s)
自动泊车:在泊车辅助系统基础上,自动控制转 向、驱动和制动
10
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
二、研究发展现状
10 提供正常驾驶 信息 5 1
17
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
二、研究发展现状
10 提供辅助控制 5 1
0
1
5
Time(s)
车道保持:自动控制汽车的转向运动,使其在车 道内行驶
采用转向系统EPS等来帮助避免碰撞
18 汽车智能辅助驾驶系统研究与发展 吉大汽车高振海 2014年3月20日
二、研究发展现状
一、研究背景和出发点
影响安全的根本原因是人-人是最不可靠的因素
• 全国驾龄不满1年的驾驶人近3000万 人,占机动车驾驶人总量的11.3 • 驾驶员非职业化:人车路闭环系统 中,85%的道路交通事故涉及到驾驶 失误 • 23%的汽车驾驶员一个月内至少在转 向盘上睡着一次 • 66%的卡车驾驶员自己在驾驶过程中 打瞌睡 由于饮酒、注意力分散、驾驶经验缺乏导致判断操纵失误 由于天气恶劣等,缺乏必要的驾驶信息………… 人是危险动物,所以还是别让他开车 我们的工作重心是让车辆和道路变得更为智能,实现安全
0
1
5
Time(s)
自适应转向车灯:根据汽车的转向状态、道路曲 率,自动调整汽车前照灯的照射区域,使得驾驶 员获得最佳可视区域
GPS
数字地图
转向状态
11
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
二、研究发展现状
10 提供正常驾 驶信息 5 1
0
1
5
Time(s)
夜视增强
2014年3月20日
二、研究发展现状
10 提供预警信息 5 1
0
1
5
Time(s)
行人防碰撞预警:人车混流 与被动安全中的行人保护相互结合
16
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
二、研究发展现状
10 提供辅助控制 5 1
0
1
5
Time(s)
自适应巡航控制:在传统的定速巡航控制 基础上,利用雷达等传感器探测与前方车 辆的相对距离和相对速度,并自动保持与 前车的合适的车间距 进一步引入起步+停车功能
19
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
三、研究技术内涵 -感知、决策与控制范围的拓宽-
20
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
三、研究技术内涵
感知
交通环境信息的获取
决策
车辆预期轨迹决策
控制
侧纵向综合控制
获得可行驶区域
21
获得预期轨迹点
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
四、最新研究进展
实例:ACC--自适应巡航系统
Driver Behavior/驾驶员统一行为模型
Information Sensor 信息感知 traffic rule 交通法规 Trajectory Decision of Vehicle Kinematics and Road Geometry/基于汽车运动学和道路几何的行驶轨迹决策 Driver Decision Evaluation Index 驾驶员决策评价指标 Legality 合法性(遵守交通规则) Efficiency 工效性(最速通过) Ease of Control 易操纵性(操纵负担小) Safety 安全性(保证行驶安全) 最 优 预 瞄 侧 纵 向 加 速 度 多 目 标 模 糊 决 策 Control Correction of Vehicle Dynamics 基于汽车动力学的驾驶 控制校正 Self-Tuning Control of Driver Understanding of Vehicle Dynamics 基于驾驶员对汽车 动力学学习和掌握 的自校正控制 Steering Angle/Displacem ent of Throttle or Brake 预期的方向盘转角/ 油门或制动踏板位移 Driving Handling Action 驾驶动作执行 Neural and Action Delay 驾驶员神经反 应和动作反应 滞后 Operation of Steering/ Running/ Braking from Driver hand and feet 手足操纵动作
2014年3月20日
一、研究背景和出发点
汽车是改变世界的机器,是达摩克利斯之剑 改变世界同时,带来了交通拥堵乃至伤亡
2009年:67759 2010年:65225
2008年汶川地震
死亡人数: 69227
2011年:62387 2012年:61500
中国交通事故死亡人数
3 汽车智能辅助驾驶系统研究与发展 吉大汽车高振海 2014年3月20日
21世纪初,进一步提出车联网和智能车路协同控制 更好地保障“零伤亡”,进而实现“零拥堵”
路测设备
基于车路协同系统的 路测设备
路测设备与信号 控制设备的通信
行人
车间通信 路测设备间通信(有线或无线)
基于车辆检测 的行人避撞
车路通信
路测设备 基于车路协同的 车辆快速通过 路测设备
27
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
四、最新研究进展
在驾驶模拟器和驾驶员在环试验台上构造无人驾驶车辆虚拟实验环境,嵌入 真实驾驶员,测试、评价无人驾驶车辆控制策略
28
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
2014年3月20日
四、最新研究进展
在3个自然科学基金的连续滚动支持下,研究并形成的智能车仿人控制框架 并提出了模型中预瞄时间、驾驶员反应时间等关键参数的标定方法
汽车智能辅助驾驶系统 研究与发展
吉林大学汽车工程学院/仿真与控制国家重点实验室 高振海 gaozh@
1 汽车智能辅助驾驶系统研究与发展 吉大汽车高振海 2014年3月20日
一、研究背景与出发点 -追求零伤亡、支撑零拥堵 最终实现无人驾驶-
2
汽车智能辅助驾驶系统研究与发展 吉大汽车高振海
4 汽车智能辅助驾驶系统研究与发展 吉大汽车高振海 2014年3月20日