西门子常用参数说明个人版
西门子常用参数及修改
输入需要搜 索的数据
输入完毕按 确认
这里可以看 到是X轴
参数数值位 置,此时需 要特别注意, 你需要屏蔽 的是第四轴, 不能直接在 这里修改, 这个地方很 容易犯错
按下取消按 钮
这里显示的就是需要屏 蔽的第四轴
修
改
按轴+按钮,
为0
直到出现AX5
每次修改参数 前都要从这里 确认是否是你 需要修改的轴
▪ 选择操作区域“启动” → “HMI” → “报警文本”,
在操作界面上输入用户 PLC 报警。
▪ 随后可以选择: ▪ 报警文本类型 xml 文件的名称 ▪ 用户循环报警 oem_alarms_cycles ▪ 用户 PLC 报警 oem_alarms_plc ▪ 用户子程序信息文本
oem_partprogram_messages
报警文本文件显示
报警文本设定
常用快捷键
▪
加
结尾
▪
加
程序编辑页面光标会直接到 当前页面拍照
▪
加
汉字编辑(拼音输入法)
▪
加
语言切换
截屏存储路径如下图所示
位移速度设定
▪ 32000 : G00,G01,G02/G03 最快速率 ▪ 32010 : 手动 G00 速率 ▪ 32020 : 手动 JOG 速率 ▪ 36200 = 参数32000 *1.5倍 (监控不可超出
修改 为0
修改为0
从通道数据 里搜索
搜索到
20070 【4】
屏蔽第四轴需注意的地方
1、搜索参数时需注意要先按搜索键,再输入需要搜 索的参数号
2、搜索到参数时,特别要注意确认好是否是你需要 修改的轴,西门子轴参数是一个参数管所有轴的, 这个时候需要利用【轴+】及【轴-】翻页查找你 所需要修改的轴
西门子变频器MM420使用说明书中文版
本《入门指南》帮助用户简单有效地使用MICROMASTER 420变频器。
如果要了解更多的技术信息,请参阅随MICROMASTER 420变频器一起提供的CD-ROM 上的《操作说明》和《参考手册》。
目录1机械安装32电气安装43避免电磁干扰54MICROMASTER 420变频器的调试64.1缺省设置4.2按照入门指南进行调试74.3使用状态显示面板进行调试74.4利用基本操作员面板进行调试84.5使用“BOP ”/“AOP ”改变参数和设置95快速调试105.1利用P0010和P0970复位105.2“快速调试”的电动机数据115.3使用“BOP ”(P0700=1)启动/停止电动机115.4利用高级操作员面板(AOP)进行调试115.5附加的控制应用115.6更多的信息……116更换显示/操作员面板126.1改变参数值的一位数字127故障排除137.1利用状态显示面板137.2利用操作员面板(BOP 和AOP)138变频器参数设置总览148.1参数结构15提供以下警告、小心和注意信息是为了您的安全,并防止损坏产品或机器内所连接的部件。
适用于特定范围的特殊警告、小心和注意在相关部分的开头列出。
为了您的人身安全,并有助于延长您的MICROMASTER 420变频器和连接在它上面的设备的使用寿命,请仔细阅读这些信息。
警告本设备带有危险电压,并控制具有潜在危险的旋转机械部件。
与警告不符合或不遵照本手册中包含的说明可能导致生命危险、严重的人身伤害或严重的财产损坏。
只有相应的专业人员、并且只有在熟悉了本手册所包含的所有安全事项、安装、操作和维护规程之后才能操作本设备。
成功而且安全地操作本设备依赖于正确地处理、安装、操作和维护本设备。
在断开所有电源之后,所有MICROMASTER模块的连接电路将维持5分钟的危险电压。
因此在断开变频器的电源之后,在对任何MICROMASTER模块进行操作之前一定要先等待5分钟。
西门子变频器基本全参数设置

6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
西门子部分说明
西门子部分说明说明:主轴需要优化时,需要将变量M0.7设置为1,优化完成后重新设置为0一、通用数据:MD14510[00]: 刀库最大刀位数 32MD14510[02]: 松刀到位延时时间单位:10msMD14510[03]: 紧刀到位延时时间单位:10msMD14510[04]: 刀套下到位延时时间单位:10msMD14510[05]: 刀套上到位延时时间单位:10msMD14510[10]: 润滑间隔单位:秒MD14510[11]: 润滑时间单位:秒MD14512[10]: .0位设为1激活X轴第一测量系统,设为O激活X轴第二测量系统.1位设为1激活Y轴第一测量系统,设为O激活Y轴第二测量系统.2位设为1激活Z轴第一测量系统,设为O激活Z轴第二测量系统.3位设为0激活A轴第一测量系统,设为1激活A轴第二测量系统MD14514[0]:主轴中心出水压力MD14514[12]: Y轴换刀点下限-----------需要设置(换刀点最小值)MD14514[13]: Y轴换刀点上限-----------需要设置(换刀点最大值)Y轴: MD30600[0] Z轴换刀点,固定点, 此数在14514[12]与14514[13]之间MD14514[14]: Z轴换刀点下限-----------需要设置(换刀点最小值)MD14514[15]: Z轴换刀点上限-----------需要设置(换刀点最大值)MD14514[16]: Y轴工作区间下限MD14514[17]: Y轴工作区间上限MD30600[1] Y轴安全点Z轴: MD30600[0] Z轴换刀点,固定点, 此数在14514[14]与14514[15]之间MD14514[20]: SP轴换刀点下限----------需要设置(换刀点最小值)MD14514[21]: SP轴换刀点上限----------需要设置(换刀点最大值)MD30600[1] Z轴安全点SP轴: MD30600[0] SP轴换刀角度,固定点,此数在14514[20]与14514[21]之间三、用户按键说明T1 机床使能T2 液压T3 工作灯T4 机床润滑T5 冷却水泵 M8开M9关T6 旋转工作台(没用)T7 排屑正T8 排屑停T9 排屑反T10 刀库调试使能手动操作模式下,长按3秒后指示灯亮,表明刀库进入手动操作模式T11 刀库正转在手动模式按下K10键灯亮,然后操作T12 刀库反转在手动模式按下K10键灯亮,然后操作T13 刀库回零在手动模式按下K10键灯亮,然后操作T14 刀臂正转在手动模式按下K10键灯亮,且Z轴要停在换刀点的位置,然后操作T15 刀套上下在手动模式按下K10键灯亮,然后操作刀库手动调整时,《NC/PLC变量》中设M1.0为1,刀臂旋转不考虑Z轴位置,并且Z轴也可以上下移动四、报警说明700007 润滑压力未到达700008 排屑电机过载700009 主轴风机过载700018 刀盘未停在准确位置,请重新回刀库零700019 主轴松刀故障,原因: 1.机械故障 2.气压低 3.检查相应输入点 46H700020 主轴夹刀故障,原因: 1.机械故障 2.气压低 3.检查相应输入点 46H700021 刀套下故障,原因: 1.机械故障 2.气压低 3.检查相应输入点 46H700022 刀套上故障,原因: 1.机械故障 2.气压低 3.检查相应输入点 46H700024 刀盘电机过载700025 刀臂电机过载700023 机械手不在原位,轴禁止移动。
西门子数控参数中文解释

西门子数控参数中文解释1. 通用参数234 Allgemeine Maschinendaten10000 机床轴名称10010 方式组的通道有效10050 基本系统时钟周期时间10060 位置控制周期的系数10070 插补运算器的周期系数10072 通讯任务周期的系数10074 PLC任务比插补任务的系数10080 实际值采样分隔系数10082 位置控制器输出保持时间的偏置10083 位置控制器输出的最大改变值10085 中断块的监控时间10090 监控周期的系数10091 检查周期时间的显示10092 交*检查周期时间的显示10100 最大PLC周期10110 PLC确认的平均时间10120 PLC启动的监控时间10130 与MMC通讯的时间限制10132 零件程序中MMC命令的监控时间10134 MMC可以同时通讯的节点的数量10140 与驱动通讯的时间限制10150 与驱动通讯的系数10160 与MMC通讯的系数10170 MMC任务的启动时间限制10180 MMC任务到准备任务的系数. 10190 模拟的换刀时间10200 线性位置的计算精度10210 角度位置的计算精度10220 生效比例系数10230 机床数据比例系数10240 基本公制长度单位10250 INCH的转换系数10300 NCK的模拟输入数10310 NCK的模拟输出数10320 NCK模拟输入的比例10330 NCK模拟输出的比例10340 预留:10350 NCK数字输入字节的数量10360 NCK数字输出字节的数量10361 开关量输入输出短路10362 NCK模拟输入的配置10364 NCK模拟输出的配置1036610368 NCK数字输出的配置10380 更新NCKI/O设备10382 NCK外设的引导时间10384 NCK I/O的处理10390 SPL外部接口的输入分配10392 SPL外部接口的输出分配10400 编译循环的输入字节数10410 编译循环输出字节数10420 编译周期的NCK输出10430 用于循环的HW-编译标志10450 分配软件凸轮到机床轴10460 负凸轮1 - 16(32)的时间响应10461 正凸轮1 - 16(32)的时间响应10470 I/O设备上1 - 8凸轮的配置10471 I/O设备上9 -16凸轮的配置10472 I/O设备上17 - 24凸轮的配置10473 I/O设备上25 - 32凸轮的配置10480 NCU凸轮信号输出的屏幕格式10530 比较器字节1的模拟量输出10531 比较器字节2的模拟量输出10540 比较器字节1的参数化10541 比较器2的参数化10600 FRAME(框架)旋转的输入类型10610 FRAME元素的参考轴10620 Euler 角的名称10630 Normal向量的名称10640 方向向量的名称10650 插补参数的名称10660 G2/G3中间坐标点的名称10700 程序预处理阶段10702 在S中防止在几个程序块中停止10704 空运行生效10710 更新的设定数据10712 未配置的NC代码列表10720 上电操作方式10730 手动(JOG)键的功能10731 手动(JOG)键的功能10900 分度轴表1位置数10910 分隔位置表110920 分度轴表2的位置数10930 分隔位置表211100 辅助功能组的辅助功能数量11110 辅助功能组说明11120 "全局用户数据编程"功能11200 上电时装载标准数据11210 仅保存修改过的机床数据11220 INI初始化文件出错时的系统反应11230 MD文件备份的结构11300 JOG方式中的INC和REF 11310 方向改变手轮的阀值11320 每个扳手位置的手轮脉冲数11330 INC/手轮的增量大小11340 3.手轮:驱动类型11342 3.手轮:驱动号/测量电路号11344 3.手轮:接入模块/测量电路11346 手轮:11380 SI测试机床数据11382 地址单元的INTEGER整数显示11384 地址单元的REAL显示11386 地址单元的整数INTEGER输入11388 地址单元的REAL输入11390 地址单元的内容重写11400 生效内部跟踪功能11410 报警输出的屏蔽11411 报警生效.11412 报警响应CHAN_NOREADY有效11413 报警参数作为文本11420 记录文件大小(KB)11430 数字化时的通道定义11432 3轴或3+2轴数字化的选择11450 参数化搜索11460 异步往复的模式表单11500 受保护的同步动作11600 固定的BAG响应.11602 ASUP运行时不考虑停止的原因11604 从哪个Asupprio固定 ASUP_START_MA 11610 生效用户定义ASUP程序11612 用户定义AS的保护级12000 灰度-编码轴进给率开关12010 轴进给倍率系数12020 速度滤波器1带宽 - 设定点12030 路径进给倍率的系数12040 灰度码快速运行倍率开关12050 快速进给的倍率系数12060 灰度码主轴倍率开关12070 主轴倍率的系数12080 回参考点速度的倍率12082 进给倍率12100 二进制编码的倍率限定12200 在倍率0时运行12202 直线轴的固定进给率12204 旋转轴的固定进给率12205 主轴固定转速13000 驱动在运行13010 逻辑驱动号13020 驱动模块的功率部分代码13030 模块识别13040 驱动类型13100 诊断驱动母线13200 探头极性改变14000 SSI绝对值编码器的波特率14010 FIPO启动延迟14020 SSI的延迟时间14500 输入字节的个数(从PLC) 14502 输出字节的个数(到PLC) 14504 用户数据的号(I14506 用户数据的号(HEX)14508 用户数据的号(FLOAT) 14510 用户数据(INT)14512 用户数据(HEX)14514 用户数据(FLOAT)14516 用户数据(HEX)18000 更新PLC接口18040 PCMCIA卡的版本和可能日期18050 自由动态内存的显示18060 自由动态内存的显示18070 双口RAM的自由内存显示18080 TC(SRAM)保留内存18082 NCK(SRAM)中的刀具18084 NCK(SRAM)中的刀库18086 NCK(SRAM)中的刀库位置18088 被de的刀架最大数量18090 CC刀库数据的数量(SRAM) 18092 CC刀库位置数据的数量(SRAM) 18094 CC刀具数据的数量(SRAM) 18096 CC每个刀刃的数据数(SRAM) 18098 CC监控数据的数量(SRAM) 18100 刀偏区(SRAM)的刀偏值18102 D号编程的类型(SRAM)18110 TOA模块(SRAM)的个数18118 GUD文件的数量(SRAM) 18120 全局GUD定义的数量(SRAM) 18130 通道GUD定义的数量(SRAM) 18140 轴GUD定义的数量(SRAM) 18150 GUD数值(SRAM)内存容量18160 宏指令的数量(SRAM)18170 附加功能的数量(DRAM) 18180 附加参数的数量(DRAM) 18190 全局保护范围的数量(SRAM) 18210 DRAM中的用户内存18220 双口RAM中的用户内存18230 SRAM中的用户内存18240 LUD无序表的大小(DRAM) 18242 LUD/GUD数值内存限制18250 通道数据(DRAM)的无序表尺寸18260 全局数据(DRAM)的无序表尺寸18270 子目录的数量18280 每个目录的文件数(SRAM) 18290 文件(SRAM)的无序表尺寸18300 子目录(SRAM)的无序表尺寸18310 被动文件系统(SRAM)的目录18320 被动文件系统的文件(SRAM) 18330 NC程序块(SRAM)的最大长度18342 低头补偿(SRAM)的中间点18350 最小零件程序内存(SRAM) 18360 FIFO-缓存大小18362 从外部执行的程序级数18400 曲线表的号(SRAM)18402 曲线段的号(SRAM)18404 曲线表多项值的数量(SRAM) 18500 外部通讯任务(DRAM)的堆栈大小18502 通讯任务(DRAM)的堆栈大小18510 伺服任务(DRAM)的堆栈大小18520 驱动任务(DRAM)的堆栈大小18530 MMC任务(DRAM)堆栈的大小18540 PLC任务(DRAM)堆栈大小18600 FRAME的精确变换18900 FPU计算错误的系统反应18910 FPU控制字的基本初始化18920 FPU计算错误的例外形式19000 操作数据19100 选项数据19110 选项数据19120 选项数据19130 选项数据19200 通道数选择(=2;与10010[1]=1同时选择) 19220 选项数据19250 选项数据19270 选项数据19280 选项数据19290 选项数据19300 选项数据19310 选项数据19320 测量头选择(=2003H)19330 选项数据19334 选项数据19340 选项数据19400 选项数据19410 选项数据19500 选项数据19600 选项数据。
西门子常用参数总结

西门子常用参数总结西门子系统调试中常用的参数如下:分配轴通用参数MD10000 AXCONF_MACHAX_NAME_TAB[0]...[4] 机床轴名称描述:如果为标准的车床和铣床配置,此参数默认值即可不用修改例:铣床:10000[0]=MX110000[1]=MY110000[2]=MZ110000[3]=MSP1车床:10000[0]=MX110000[1]=MZ110000[2]=MSP1参数生效方式:Power On通道参数MD20050 AXCONF_GEOAX_ASSIGN_TAB[0]...[2] 分配几何轴到通道轴描述:如果为标准的车床和铣床配置,此参数默认值即可不用修改例:铣床:20050[0]=120050[1]=2车床:20050[0]=120050[1]=020050[2]=2参数生效方式:Power OnMD20060 AXCONF_GEOAX_NAME_TAB [0]...[2] 通道中的几何轴名称描述:如果为标准的车床和铣床配置,此参数默认值即可不用修改例:铣床:20060[0]=X20060[1]=Y20060[2]=Z车床:20060[0]=X20060[1]=20060[2]=Z在车床中,20060[1]为空,可不填参数生效方式:Power OnMD20070 AXCONF_MACHAX_USED [0]...[4] 通道中有效的机床轴号描述:如果为标准的车床和铣床配置,此参数默认值即可不用修改例:铣床:20070[0]=120070[2]=320070[3]=420070[4]=0车床:20070[0]=120070[1]=220070[2]=320070[3]=020070[4]=0参数生效方式:Power OnMD20080 AXCONF_CHANAX_NAME_TAB[0]...[4] 通道中的通道轴名称描述:如果为标准的车床和铣床配置,此参数默认值即可不用修改例:铣床:20080[0]=X120080[1]=Y120080[2]=Z120080[3]=SP120080[4]=车床:20080[0]=X120080[1]=Z120080[2]=SP120080[3]=20080[4]=参数生效方式:Power On轴参数MD30130 CTRLOUT_TYPE[0] 设定值输出的类型30130[0]=0:模拟30130[0]=1:设定输出有效参数生效方式:Power OnMD30240 ENC_TYPE[0]…[1] 实际值采集的编码器类型描述:ENC_TYPE[0]:对应第一测量系统ENC_TYPE[1]:对应第二测量系统0:模拟1:增量编码器4:绝对值编码器参数生效方式:Power On828D系统上激活外部 I/O、MCPMD12986 PLC_DEACT_IMAGE_LADDR_IN[0]...[6] 取消激活与PLC 图像的外设连接描述:PLC 输入输出映像区的逻辑地址而非实际连接的输入输出。
西门子数控参数中文解释
西门子数控参数中文解释西门子数控参数中文解释1. 通用参数234 Allgemeine Maschinendaten10000 机床轴名称10010 方式组的通道有效10050 基本系统时钟周期时间10060 位置控制周期的系数10070 插补运算器的周期系数10072 通讯任务周期的系数10074 PLC任务比插补任务的系数10080 实际值采样分隔系数10082 位置控制器输出保持时间的偏置10083 位置控制器输出的最大改变值10085 中断块的监控时间10090 监控周期的系数10091 检查周期时间的显示10092 交*检查周期时间的显示10100 最大PLC周期10110 PLC确认的平均时间10120 PLC启动的监控时间10130 与MMC通讯的时间限制10132 零件程序中MMC命令的监控时间10134 MMC可以同时通讯的节点的数量10140 与驱动通讯的时间限制10150 与驱动通讯的系数10160 与MMC通讯的系数10170 MMC任务的启动时间限制10180 MMC任务到准备任务的系数. 10190 模拟的换刀时间10200 线性位置的计算精度10210 角度位置的计算精度10220 生效比例系数10230 机床数据比例系数10240 基本公制长度单位10250 INCH的转换系数10300 NCK的模拟输入数10310 NCK的模拟输出数10320 NCK模拟输入的比例10330 NCK模拟输出的比例10340 预留:10350 NCK数字输入字节的数量10360 NCK数字输出字节的数量10361 开关量输入输出短路10362 NCK模拟输入的配置10364 NCK模拟输出的配置1036610368 NCK数字输出的配置10380 更新NCKI/O设备10382 NCK外设的引导时间10384 NCK I/O的处理10390 SPL外部接口的输入分配10392 SPL外部接口的输出分配10400 编译循环的输入字节数10410 编译循环输出字节数10420 编译周期的NCK输出10430 用于循环的HW-编译标志10450 分配软件凸轮到机床轴10460 负凸轮1 - 16(32)的时间响应10461 正凸轮1 - 16(32)的时间响应10470 I/O设备上1 - 8凸轮的配置10471 I/O设备上9 -16凸轮的配置10472 I/O设备上17 - 24凸轮的配置10473 I/O设备上25 - 32凸轮的配置10480 NCU凸轮信号输出的屏幕格式10530 比较器字节1的模拟量输出10531 比较器字节2的模拟量输出10540 比较器字节1的参数化10541 比较器2的参数化10600 FRAME(框架)旋转的输入类型10610 FRAME元素的参考轴10620 Euler 角的名称10630 Normal向量的名称10640 方向向量的名称10650 插补参数的名称10660 G2/G3中间坐标点的名称10700 程序预处理阶段10702 在S中防止在几个程序块中停止10704 空运行生效10710 更新的设定数据10712 未配置的NC代码列表10720 上电操作方式10730 手动(JOG)键的功能10731 手动(JOG)键的功能10900 分度轴表1位置数10910 分隔位置表110920 分度轴表2的位置数10930 分隔位置表211100 辅助功能组的辅助功能数量11110 辅助功能组说明11120 "全局用户数据编程"功能11200 上电时装载标准数据11210 仅保存修改过的机床数据11220 INI初始化文件出错时的系统反应11230 MD文件备份的结构11300 JOG方式中的INC和REF 11310 方向改变手轮的阀值11320 每个扳手位置的手轮脉冲数11330 INC/手轮的增量大小11340 3.手轮:驱动类型11342 3.手轮:驱动号/测量电路号11344 3.手轮:接入模块/测量电路11346 手轮:11380 SI测试机床数据11382 地址单元的INTEGER整数显示11384 地址单元的REAL 显示11386 地址单元的整数INTEGER输入11388 地址单元的REAL 输入11390 地址单元的内容重写11400 生效内部跟踪功能11410 报警输出的屏蔽11411 报警生效.11412 报警响应CHAN_NOREADY有效11413 报警参数作为文本11420 记录文件大小(KB)11430 数字化时的通道定义11432 3轴或3+2轴数字化的选择11450 参数化搜索11460 异步往复的模式表单11500 受保护的同步动作11600 固定的BAG响应.11602 ASUP运行时不考虑停止的原因11604 从哪个Asupprio固定ASUP_START_MA 11610 生效用户定义ASUP程序11612 用户定义AS的保护级12000 灰度-编码轴进给率开关12010 轴进给倍率系数12020 速度滤波器1带宽 - 设定点12030 路径进给倍率的系数12040 灰度码快速运行倍率开关12050 快速进给的倍率系数12060 灰度码主轴倍率开关12070 主轴倍率的系数12080 回参考点速度的倍率12082 进给倍率12100 二进制编码的倍率限定12200 在倍率0时运行12202 直线轴的固定进给率12204 旋转轴的固定进给率12205 主轴固定转速13000 驱动在运行13010 逻辑驱动号13020 驱动模块的功率部分代码13030 模块识别13040 驱动类型13100 诊断驱动母线13200 探头极性改变14000 SSI绝对值编码器的波特率14010 FIPO启动延迟14020 SSI的延迟时间14500 输入字节的个数(从PLC) 14502 输出字节的个数(到PLC) 14504 用户数据的号(I14506 用户数据的号(HEX)14508 用户数据的号(FLOAT) 14510 用户数据(INT)14512 用户数据(HEX)14514 用户数据(FLOAT)14516 用户数据(HEX)18000 更新PLC接口18040 PCMCIA卡的版本和可能日期18050 自由动态内存的显示18060 自由动态内存的显示18070 双口RAM的自由内存显示18080 TC(SRAM)保留内存18082 NCK(SRAM)中的刀具18084 NCK(SRAM)中的刀库18086 NCK(SRAM)中的刀库位置18088 被de的刀架最大数量18090 CC刀库数据的数量(SRAM) 18092 CC刀库位置数据的数量(SRAM) 18094 CC刀具数据的数量(SRAM) 18096 CC每个刀刃的数据数(SRAM) 18098 CC监控数据的数量(SRAM) 18100 刀偏区(SRAM)的刀偏值18102 D号编程的类型(SRAM)18110 TOA模块(SRAM)的个数18118 GUD文件的数量(SRAM) 18120 全局GUD定义的数量(SRAM) 18130 通道GUD定义的数量(SRAM) 18140 轴GUD定义的数量(SRAM) 18150 GUD数值(SRAM)内存容量18160 宏指令的数量(SRAM)18170 附加功能的数量(DRAM) 18180 附加参数的数量(DRAM) 18190 全局保护范围的数量(SRAM) 18210 DRAM中的用户内存18220 双口RAM中的用户内存18230 SRAM中的用户内存18240 LUD无序表的大小(DRAM) 18242 LUD/GUD数值内存限制18250 通道数据(DRAM)的无序表尺寸18260 全局数据(DRAM)的无序表尺寸18270 子目录的数量18280 每个目录的文件数(SRAM) 18290 文件(SRAM)的无序表尺寸18300 子目录(SRAM)的无序表尺寸18310 被动文件系统(SRAM)的目录18320 被动文件系统的文件(SRAM) 18330 NC程序块(SRAM)的最大长度18342 低头补偿(SRAM)的中间点18350 最小零件程序内存(SRAM) 18360 FIFO-缓存大小18362 从外部执行的程序级数18400 曲线表的号(SRAM)18402 曲线段的号(SRAM)18404 曲线表多项值的数量(SRAM) 18500 外部通讯任务(DRAM)的堆栈大小18502 通讯任务(DRAM)的堆栈大小18510 伺服任务(DRAM)的堆栈大小18520 驱动任务(DRAM)的堆栈大小18530 MMC 任务(DRAM)堆栈的大小18540 PLC任务(DRAM)堆栈大小18600 FRAME的精确变换18900 FPU计算错误的系统反应18910 FPU控制字的基本初始化18920 FPU计算错误的例外形式19000 操作数据19100 选项数据19110 选项数据19120 选项数据19130 选项数据19200 通道数选择(=2;与10010[1]=1同时选择) 19220 选项数据19250 选项数据19270 选项数据19280 选项数据19290 选项数据19300 选项数据19310 选项数据19320 测量头选择(=2003H)19330 选项数据19334 选项数据19340 选项数据19400 选项数据19410 选项数据19500 选项数据19600 选项数据。
西门子变频器的主要参数介绍(16K最终版7.19)

西门子MICROMASTER 420 变频器的参数手册主编隋美娥青岛港湾职业技术学院目录1. 西门子MICROMASTER 420 变频器的参数表 (1)2.故障的排除 (49)1.西门子MICROMASTER 420 变频器的参数表说明:用BOP 或AOP 操作板看不到第4 访问级的参数。
说明:按下“Fn”键并持续2 秒,用户就可看到直流回路电压,输出电流和输出频率的数值,以及选定的r0000 设定值(在P0005 中定义)。
可能的显示值:0 调试方式(P0010 != 0); 1 驱动装置运行准备就绪; 2 驱动装置故障;3 驱动装置正在起动(直流回路预充电);4 驱动装置正在运行;5 停车(斜坡函数正在下降)关联:状态 3 只能在直流回路预充电,并且安装了由外部电源供电的通讯板时才能看到。
说明:对于大多数简单的应用对象,采用缺省设定值(标准模式)就可以满足要求了。
可能的设定值:0 用户定义的参数表-有关使用方法的详细情况请参看P0013 的说明1 标准级:可以访问最经常使用的一些参数。
2 扩展级:允许扩展访问参数的范围,例如变频器的I/O 功能。
3 专家级:只供专家使用。
4 维修级:只供授权的维修人员使用-具有密码保护。
可能的设定值:0 全部参数; 2 变频器参数; 3 电动机参数;7 命令,二进制I/O;8 ADC(模-数转换)和DAC(数-模转换);10 设定值通道/ RFG (斜坡函数发生器);12 驱动装置的特征;13 电动机的控制;20 通讯;21 报警/ 警告/ 监控;22 工艺参量控制器(例如PID)举例:P0004 = 22 选定的功能是,只能看到PID 参数。
设定值:21 实际频率;25 输出电压;26 直流回路电压;27 输出电流提示:以上这些设定值(21,25....等)指的是只读参数号(“r0021,r0025..... 等”)。
可能的设定值:0 在“运行准备”状态下,交替显示频率的设定值和输出频率的实际值。
西门子常用参数说明个人版

L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
2013 Q2~ CNC LAB工作計劃
L.K. Machinery, KUNSHAN
西门子的相关常用参数的设定
L.K. nery, KUNSHAN
L.K. Machinery, KUNSHAN
L.K. Machinery, KUNSHAN
M表示是辅助存储单元 B 是指长度占一个字节 W 是指长度占一个字(两个字节) D 是指长度占一个双字(四个字节)
L.K. Machinery, KUNSHAN
• p1991[0...n] 电机转换 换向角补偿 / 换向角补偿
返回参考点的相关参数
常用数据通道
主轴相关参数设定
MD35100设置最大转速 • MD35160设置plc给出的主轴速度限制 • MD34090设置主轴定位是的偏差量 (43240等同) • P322和p1082是设定主轴最大转速(驱动 参数)
以上, 敬请指导!
相关驱动参数
p1082[0...n] 最大转速 / 最大转速《(相关参数p322)设置最大的可能转速》 p1083[0...n] CO: 正旋转方向转速极限 / 正旋转方向转速极限 p1086[0...n] CO: 负旋转方向转速极限 / 负旋转方向转速极限 p1338[0...n] V/f 运行谐振阻尼增益 / V/f 谐振阻尼增益 p1339[0...n] V/f 运行谐振阻尼的滤波时间常数 / V/f 谐振阻尼T p1345[0...n] 直流制动比例增益 / 直流制动比例增益 p1346[0...n] 直流制动积分时间 / 直流制动积分时间 p1349[0...n] V/f 运行谐振阻尼最大频率 / V/f 谐振阻尼F_ p1413[0...n] 激活转速实际值滤波器 / n 实际值滤波器激活 p1414[0...n] 转速设定值滤波器激活 / 转速设定值过滤激活 p1415[0...n] 转速设定值滤波器 1 类型 / n_ 设定_ 滤波1 类型 p1456[0...n] 转速控制器 P 增益适配 导通点下限 / n 调节适配Kp 下限 p1457[0...n] 转速控制器 P 增益适配 导通点上限 / n 调节适配Kp 上限 p1494[0...n] 转速控制器积分返回时间常数 / n 控制积分器反馈T p0392[0...n] 已匹配的电流控制器适配导通点 KP / I_ 适配 点 KP 匹配 p0393[0...n] 电流控制器适配P 增益匹配 / I_ 适配 Kp 匹配
西门子参数简介

西门子无线参数配置简要说明该参数说明适用于西门子BR5.0版本的情况,所列是一些常用的参数并就其作了简要说明,更具体详尽描述请参照西门子BSC数据库参数说明文档“DB50-DSC.pdf”。
一、 BTS公共参数1、命令格式:CREATEBTSPKGBTSB:NAME=BSC:0/bts:0,BTSMN=0,BTSR=0,CELLGLID="460"-"01"-9880-10012,BSIC=1-3,PLMNP=2,CELLRESH=4,MSTXPMAX=5,RXLEVAMI=8,RDLNKTO=10,RACHBT=10 5,RACHLAS=250,TCCCHLDI=100,PCCCHLDI=255,FACCHQ=5,CELLTYPE=STDCELL,SYS ID=BB900,BCCHFREQ=102,CALL=111&112&113&114&115&116&117&118&119&120&121 &122&123&124,CRESPARI=1,CRESOFF=5,TEMPOFF=0,PENTIME=0,CBQ=0,NMULBAC= 3,CONCELL=FALSE,BTSHSCSD=FALSE;2、参数说明:CELLGLID:小区全球识别码,其保证了全球范围内的每个小区都有唯一的号码与之对应,格式为:MCC-MNC-LAC-CI。
BSIC:基站识别码,移动台以BSIC来区分频道号相同的小区,BSIC在每个小区的同步信道(SCH)上发送,格式为:NCC(网络色码)——BCC(基站色码)。
PLMNP:允许的网络色码,其列出了移动台需测量的小区的NCC码的集合。
CELLRESH:小区重选滞后值(原小区和目标小区属不同的位置区),规定邻区的信号电平必须比本小区的大,且差值必须大于重选滞后参数CELLRESH规定的值后,MS才可以启动小区重选。
西门子440变频器参数的说明
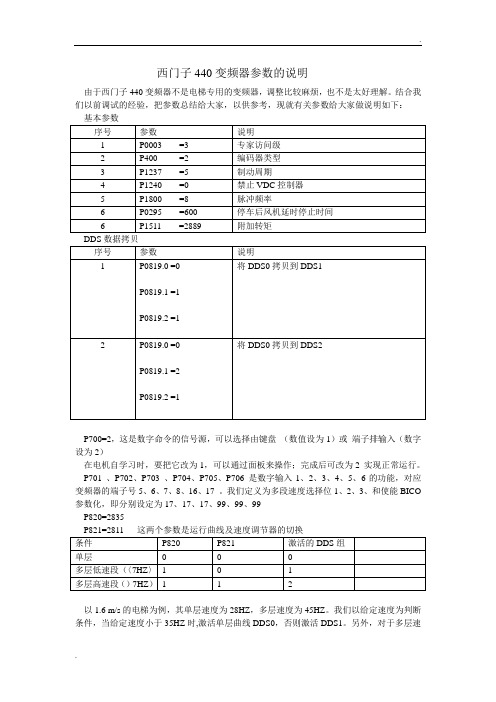
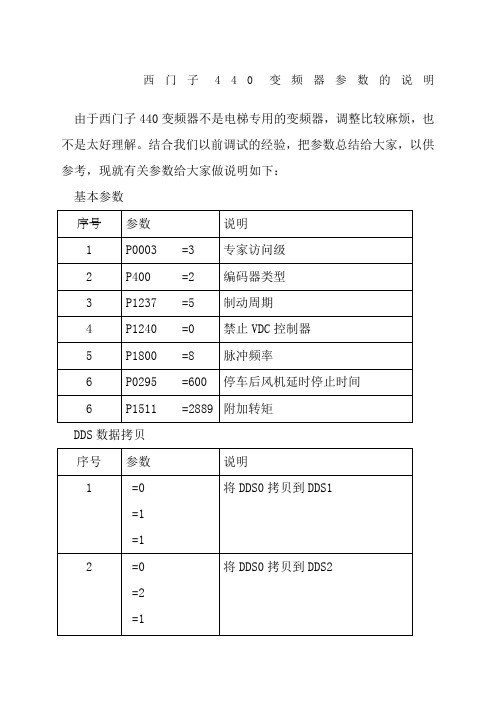
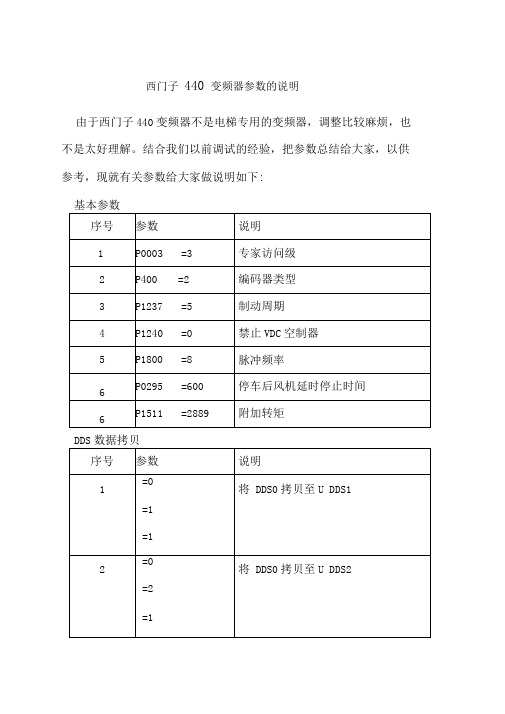
西门子440变频器参数的说明由于西门子440变频器不是电梯专用的变频器,调整比较麻烦,也不是太好理解。
结合我们以前调试的经验,把参数总结给大家,以供参考,现就有关参数给大家做说明如下:P700=2,这是数字命令的信号源,可以选择由键盘 (数值设为1)或 端子排输入(数字设为2)在电机自学习时,要把它改为1,可以通过面板来操作;完成后可改为2 实现正常运行。
P701 、P702、P703 、P704、P705、P706 是数字输入1、2、3、4、5、6的功能,对应变频器的端子号5、6、7、8、16、17 。
我们定义为多段速度选择位1、2、3、和使能BICO 参数化,即分别设定为17、17、17、99、99、99 P820=2835以1.6 m/s 的电梯为例,其单层速度为28HZ ,多层速度为45HZ 。
我们以给定速度为判断条件,当给定速度小于35HZ 时,激活单层曲线DDS0,否则激活DDS1。
另外,对于多层速度,我们对速度调节器的增益系数和积分时间常数做了一下切换,当实际速度小于7HZ时,激活DDS1,当实际速度大于7HZ时,激活DDS2,P2890=70%P2885=1024(r1024是实际的固定频率)P2885 是比较器1(说明书10-212页),当r1024大于或等于P2889时r2886=1; 当r1024小于P2889时r2886=0;要激活P2885 需要P2800=1 P2802[12]=1,比较的结果是r2886,我们把比较结果设在P2834(D—FF1即D-触发器1)中,P2834[0]=2886:0,置位P2834[1]=0:0,D-输入P2834[2]=0:0,存储脉冲P2834[3]=2813:0,复位D-触发器1有两个结果,r2835和r2836,而我们设定P820=2835,就选择DDS1。
而D-触发器1的激活级是P2801[12],故我们设定P2801[12]=3(优先级)而当P821=2811=1时,则选择DDS2,其中用到的参数有r53.2 p1080变频器的实际频率是否大于或等于P1080如果是则是1,如果不是则是0;其结果由p2828(NOT1)转换后由r2829 输出,p2801[9]是p2828的激活级;而r2829又和r2835通过p2812(AND2)与后由r2813输出结果,p2812p2801[1]又是p2812的激活级r2813r53.4p2155变频器的实际频率是否大于P2155如果是则是1,如果不是则是0,这个结果又通过p2810(AND1)由2811输出p2801[0]是2810的激活级r2811P2828=53:2P840=722:3=数字输入4,(要求P704 设定为99,BICO)正向运行的ON/OFF命令P842=722:4=数字输入5,(要求P705 设定为99,BICO)反向运行的ON/OFF命令这两个参数的社的设定只有在P719=0时才能激活。
西门子变频器常用参数的设置
西门子变频器常用参数的设置1变频器的控制方式它是由负载的力矩特性所决定的,电动机的机械负载转矩特性由下式决定:P=Tn/9550式中:P:电动机功率KW.T:电动机转矩N*M.n:电动机的转速rpm。
转矩T与转速n 的关系可分为3种:①恒转矩:转速变化时转矩恒定的负载。
如传送带,起重机等;②恒功率:转速和转矩成反比关系,但是二者之积恒定不变。
如机床主轴;③变转矩:转矩随着转速的变化按照一定的函数关系变化的负载。
如风机,泵类等。
当参数变频器控制方式P1300=0时变频器工作在线性U/F方式,此方式能够适应大多数恒转矩负载。
如果负载是风机,泵类则P1300=1。
在变频调速的时候系统可能会发生共振现象,从而造成系统工作异常甚至机械损坏,为此变频器提供了可跳转频率的功能,P1091~P1094用于设置跳转频率点P1101用于设置跳频带宽,从而防止共振。
当P1300=3时变频器的工作在可编程的U/F控制方式P1320.P1322.P1324提供了可编程频率坐标,P1321.P1323.P1325提供了可编程的电压坐标,该方式能在某一特定频率下为电动机提供特定的转矩以适应负载的变化。
矢量控制是仿照直流电动机的控制思想对异步电动机开展控制,首先将定子三相电流通过坐标换算成励磁电流分量和电枢电流分量并且分别对这2个量开展控制。
因此电动机的机械特性是非常硬的而且具有很高的动态响应能力。
根据需要可以将P1300=20/21无/有反应矢量控制或P1300=22/23无/有反应的矢量转矩控制以满足负载的控制精度。
2加/减速时间加速时间定义为输出频率从0上升到最大频率所需要的时间,减速时间定义为输出频率从最大下降到0所需要的时间。
加/减速时间设置的合理与否对电动机的起动,结束,以及调速系统对速度变化的响应都有很大的影响。
加速时间的设置应该把电动机的定子电流限制在变频器的额定电流以内而不使过流保护装置动作。
电动机在减速过程中处于再生发电制动状态,其回馈的能量通过逆变器上的续流二极管反送到直流母线的电解电容器上,从而使其起两端的电压升高。
西门子变频器基本全参数设置
6SE70调试基本参数设置恢复缺省设置P053=6 允许参数存取6:允许通过PMU和串行接口OP1S变更参数P060=2 固定设置菜单P366=0 0:具有PMU的标准设置1:具有OP1S的标准设置P970=0 参数复位参数设置P060=5 系统设置菜单P071= 装置输入电压P095=10 异步/同步电机,国际标准P100= 1:V/f控制3:无测速机的速度控制4:有测速机的速度控制5:转矩控制P101= 电机额定电压P102= 电机额定电流P103= 电机励磁电流,如果此值未知,设P103=0当离开系统设置,此值自动计算。
P104= 电机额定功率因数P108= 电机额定转速P109= 电机级对数P113= 电机额定转矩P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型参数值P350-P354设定到额定值P130= 10:无脉冲编码器11:脉冲编码器P151= 脉冲编码器每转的脉冲数P330= 0:线性(恒转矩)1:抛物线特性(风机/泵)P384.02= 电机负载限制P452= % 正向旋转时的最大频率或速度P453= % 反向旋转时的最大频率或速度数值参考P352和P353P060=1 回到参数菜单P128= 最大输出电流P462= 上升时间P464= 下降时间P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸)6SE70 变频装置调试步骤一.内控参数设定1.1 出厂参数设定P053=7 允许CBP+PMU+PC 机修改参数P60=2 固定设置,参数恢复到缺省P366=0 PMU 控制P970=0 启动参数复位执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。
电机和控制参数未进行设定,不能实施电机调试。
1.2 简单参数设定P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数P071 进线电压(变频器400V AC / 逆变器540V DC)P95=10 IEC 电机P100=1 V/F 开环控制3 不带编码器的矢量控制4 带编码器的矢量控制P101 电机额定电压P102 电机额定电流P107 电机额定频率HZP108 电机额定速度RPMP114=0P368=0 设定和命令源为PMU+MOPP370=1 启动简单应用参数设置P60=0 结束简单应用参数设置执行上述参数设定后,变频器自动组合功能图连接和参数设定。
西门子变频器参数的说明
西门子440变频器参数的说明由于西门子440变频器不是电梯专用的变频器,调整比较麻烦,也不是太好理解。
结合我们以前调试的经验,把参数总结给大家,以供参考,现就有关参数给大家做说明如下:基本参数DDS数据拷贝P700=2,这是数字命令的信号源,可以选择由键盘(数值设为1)或端子排输入(数字设为2)在电机自学习时,要把它改为1,可以通过面板来操作;完成后可改为2 实现正常运行。
P701 、P702、P703 、P704、P705、P706 是数字输入1、2、3、4、5、6的功能,对应变频器的端子号5、6、7、8、16、17 。
我们定义为多段速度选择位1、2、3、和使能BICO参数化,即分别设定为17、17、17、99、99、99P820=2835P821=2811 这两个参数是运行曲线及速度调节器的切换以 m/s的电梯为例,其单层速度为28HZ,多层速度为45HZ。
我们以给定速度为判断条件,当给定速度小于35HZ时,激活单层曲线DDS0,否则激活DDS1。
另外,对于多层速度,我们对速度调节器的增益系数和积分时间常数做了一下切换,当实际速度小于7HZ时,激活DDS1,当实际速度大于7HZ时,激活DDS2,P2890=70%P2885=1024(r1024是实际的固定频率)P2885 是比较器1(说明书10-212页),当r1024大于或等于P2889时r2886=1; 当r1024小于P2889时r2886=0;要激活P2885 需要P2800=1 P2802[12]=1,比较的结果是r2886,我们把比较结果设在P2834(D—FF1即D-触发器1)中,P2834[0]=2886:0,置位P2834[1]=0:0, D-输入P2834[2]=0:0,存储脉冲P2834[3]=2813:0,复位D-触发器1有两个结果,r2835和r2836,而我们设定P820=2835,就选择DDS1。
而D-触发器1的激活级是P2801[12],故我们设定P2801[12]=3(优先级)而当P821=2811=1时,则选择DDS2,其中用到的参数有p1080变频器的实际频率是否大于或等于P1080如果是则是1,如果不是则是0;其结果由p2828(NOT1)转换后由r2829 输出,p2801[9]是p2828的激活级;而r2829又和r2835通过p2812(AND2)与后由r2813输出结果, p2812p2801[1]又是p2812的激活级变频器的实际频率是否大于P2155如果是则是1,如果不是则是0,这个结果又通过 p2810(AND1)由2811输出p2801[0]是2810的激活级r2811P2828=53:2P840=722:3=数字输入4,(要求P704 设定为99,BICO)正向运行的ON/OFF命令P842=722:4=数字输入5,(要求P705 设定为99,BICO)反向运行的ON/OFF命令这两个参数的社的设定只有在P719=0时才能激活。
西门子变频器参数的说明
西门子440 变频器参数的说明由于西门子440变频器不是电梯专用的变频器,调整比较麻烦,也不是太好理解。
结合我们以前调试的经验,把参数总结给大家,以供参考,现就有关参数给大家做说明如下:基本参数DDS数据拷贝P700=2,这是数字命令的信号源,可以选择由键盘 或 端子排输入(数字设为2)在电机自学习时,要把它改为 1,可以通过面板来操作;完成后可 改为2实现正常运行。
P701、P702、P703、P704、P705 P706 是数字输入 1、2、3、4、 5、6的功能,对应变频器的端子号5、6、7、8、16、17。
我们定义为多段速度选择位1、2、3、和使能BICO 参数化,即分别设定为17、17、 17、 99、 99、 99 P820=2835P821=2811 这两个参数是运行曲线及速度调节器的切换以m/s 的电梯为例,其单层速度为 28HZ 多层速度为45H 乙我们 DDS0否则激活DDS1另外,对于多层速度,我们对速度调节器的增 益系数和积分时间常数做了一下切换,当实际速度小于7HZ 时,激活DDS1当实际速度大于 7HZ 时,激活DDS2 P2890=70%(数值设为1)以给定速度为判断条件,当给定速度小于35HZ 时,激活单层曲线P2885=1024(r1024 是实际的固定频率)P2885 是比较器1(说明书10-212 页),当r1024 大于或等于P2889 时r2886=1; 当r1024 小于P2889 时r2886=0;要激活P2885 需要P2800=1 P2802[12]=1 ,比较的结果是r2886,我们把比较结果设在P2834(D- FF1即D-触发器1)中P2834[0]=2886 :0,置位P2834[1]=0 : 0,D- 输入P2834[2]=0 : 0,存储脉冲P2834[3]=2813 :0,复位D-触发器1有两个结果,r2835和r2836,而我们设定P820=2835,就选择DDS1而D-触发器1的激活级是P2801[12],故我们设定P2801[12]=3 (优先级)而当P821=2811=1时,则选择DDS2其中用到的参数有p1080变频器的实际频率是否大于或等于P1080如果是则是1,如果不是则是0 ;其结果由p2828 (N0T1转换后由r2829输出,p2801[9]是p2828 的激活级;而r2829 又和r2835 通过p2812( AND2 与后由r2813输出结果,p2812p2801[1]又是p2812的激活级变频器的实际频率是否大于P2155如果是则是1,如果不是则是0,这个结果又通过p2810(AND1由2811输出p2801[0]是2810的激活级r2811P2828=53:2P840=722: 3=数字输入4,(要求P704设定为99,BICO正向运行的ON/OFF 命令P842=722: 4=数字输入5,(要求P705设定为99,的ON/OFF 命令这两个参数的社的设定只有在 P719=0时才能激活。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
39
40
41
42
43
44
主轴相关参数设定
MD35100设置最大转速 • MD35160设置plc给出的主轴速度限制 • MD34090设置主轴定位是的偏差量
(43240等同) • P322和p1082是设定主轴最大转速(驱动
参数)
45
以上, 敬请指导!
46
12
L.K. Machinery, KUNSHAN
• p1991[0...n] 电机转换 换向角补偿 / 换向角补偿
13
14
15
16
17
18
19
20
21
22
返回参考点的相关参数
23
24
25
常用数据通道
262728来自 293031
32
33
34
35
36
37
38
5
L.K. Machinery, KUNSHAN
6
L.K. Machinery, KUNSHAN
7
L.K. Machinery, KUNSHAN
8
L.K. Machinery, KUNSHAN
9
L.K. Machinery, KUNSHAN
10
L.K. Machinery, KUNSHAN
2013 Q2~ CNC LAB工作計劃
1
L.K. Machinery, KUNSHAN
西门子的相关常用参数的设定
2
L.K. Machinery, KUNSHAN
3
L.K. Machinery, KUNSHAN
4
L.K. Machinery, KUNSHAN
M表示是辅助存储单元 B 是指长度占一个字节 W 是指长度占一个字(两个字节) D 是指长度占一个双字(四个字节)
11
L.K. Machinery, KUNSHAN
相关驱动参数
p1082[0...n] 最大转速 / 最大转速《(相关参数p322)设置最大的可能转速》 p1083[0...n] CO: 正旋转方向转速极限 / 正旋转方向转速极限 p1086[0...n] CO: 负旋转方向转速极限 / 负旋转方向转速极限 p1338[0...n] V/f 运行谐振阻尼增益 / V/f 谐振阻尼增益 p1339[0...n] V/f 运行谐振阻尼的滤波时间常数 / V/f 谐振阻尼T p1345[0...n] 直流制动比例增益 / 直流制动比例增益 p1346[0...n] 直流制动积分时间 / 直流制动积分时间 p1349[0...n] V/f 运行谐振阻尼最大频率 / V/f 谐振阻尼F_ p1413[0...n] 激活转速实际值滤波器 / n 实际值滤波器激活 p1414[0...n] 转速设定值滤波器激活 / 转速设定值过滤激活 p1415[0...n] 转速设定值滤波器 1 类型 / n_ 设定_ 滤波1 类型 p1456[0...n] 转速控制器 P 增益适配 导通点下限 / n 调节适配Kp 下限 p1457[0...n] 转速控制器 P 增益适配 导通点上限 / n 调节适配Kp 上限 p1494[0...n] 转速控制器积分返回时间常数 / n 控制积分器反馈T p0392[0...n] 已匹配的电流控制器适配导通点 KP / I_ 适配 点 KP 匹配 p0393[0...n] 电流控制器适配P 增益匹配 / I_ 适配 Kp 匹配