ReadMe_Psychtoolbox安装
python setuptool 范例 -回复

python setuptool 范例-回复Python Setuptools范例:从安装到使用的一步一步指南引言:Python是一种功能强大的编程语言,它提供了丰富的库和工具,使开发人员能够更高效地编写和管理代码。
而Setuptools则是Python生态系统中常用的一个工具,它提供了一种简单和方便的方式来构建、打包和分发Python项目。
本文将介绍如何使用Setuptools,从安装开始到实际使用这个工具的各个方面。
第一步:安装Setuptools首先,我们需要安装Setuptools。
在命令行中运行以下命令:pip install setuptools如果你使用的是Python 3.4以上的版本,Setuptools已经包含在Python标准库中,所以你不需要安装它。
否则,你需要通过pip来安装Setuptools。
第二步:创建项目结构在开始使用Setuptools之前,我们需要为我们的项目创建一个合适的目录结构。
我们可以按照以下方式创建我们的项目目录:myproject/myproject/__init__.py` mymodule.py` setup.py在上述例子中,我们创建了一个名为myproject的目录,该项目目录下又包含了一个相同的子目录和一个setup.py文件。
__init__.py是一个空文件,用于标记该目录是一个Python包。
mymodule.py文件是我们实际的Python模块文件,其中包含了一些可供其他模块调用的代码。
第三步:编写setup.py文件在使用Setuptools之前,我们需要创建一个setup.py文件,并在其中定义我们的包的元数据和其他相关配置。
打开setup.py文件,并按照以下步骤进行编辑:步骤1:导入必要的模块首先,我们需要从setuptools模块中导入setup函数,以便在我们的setup()函数中使用它。
在文件的开头添加以下代码:pythonfrom setuptools import setup步骤2:设置包的元数据在setup()函数中,我们需要提供一些关键的信息,以描述我们的包。
sdmtoolbox用法

sdmtoolbox用法(原创版)目录1.sdmtoolbox 简介2.sdmtoolbox 基本用法3.sdmtoolbox 高级用法4.sdmtoolbox 示例正文【sdmtoolbox 简介】sdmtoolbox 是一个 Python 库,用于处理软件定义网络(SDN)控制器和网络设备之间的通信。
它提供了丰富的功能,可以帮助开发者轻松地实现 SDN 应用程序。
【sdmtoolbox 基本用法】要开始使用 sdmtoolbox,首先需要安装它。
在终端中运行以下命令即可完成安装:```pip install sdmtoolbox```安装完成后,可以通过导入 sdmtoolbox 库并创建一个 API 实例来使用它。
以下是一个简单的示例:```pythonfrom sdmtoolbox import sdm_apiapi = sdm_api.Api()```【sdmtoolbox 高级用法】sdmtoolbox 提供了许多高级功能,如创建和删除流表项、添加和删除流、发送和接收数据包等。
以下是一些示例:- 创建流表项:```pythontable = api.create_table(1, "my_table")```- 添加流:```pythonentry = api.create_entry(1, "my_table", "my_entry", 1, 2, "ip", "ip", 1)```- 发送数据包:```pythonpacket = api.create_packet(1, "my_table", "my_entry", b"abcdef01234567")```- 接收数据包:```pythonpacket = api.receive_packet(1, "my_table", "my_entry")```【sdmtoolbox 示例】以下是一个完整的 sdmtoolbox 示例,演示了如何创建一个流表项并使用它发送和接收数据包:```pythonfrom sdmtoolbox import sdm_api# 创建 API 实例api = sdm_api.Api()# 创建流表项table = api.create_table(1, "my_table")# 添加流entry = api.create_entry(1, "my_table", "my_entry", 1, 2, "ip", "ip", 1)# 创建数据包packet = api.create_packet(1, "my_table", "my_entry", b"abcdef01234567")# 发送数据包api.send_packet(1, "my_table", "my_entry", packet)# 接收数据包packet = api.receive_packet(1, "my_table", "my_entry")print("Received packet:", packet)# 删除流表项api.delete_entry(1, "my_table", "my_entry")# 删除流表api.delete_table(1, "my_table")```通过以上示例,您可以看到如何使用 sdmtoolbox 实现 SDN 应用程序的基本功能。
哈工大自然语言处理工具箱之ltp在windows10下的安装使用教程

哈⼯⼤⾃然语⾔处理⼯具箱之ltp在windows10下的安装使⽤教程ltp是哈⼯⼤出品的⾃然语⾔处理⼯具箱, pyltp是python下对ltp(c++)的封装.在linux下我们很容易的安装pyltp, 因为各种编译⼯具⽐较⽅便. 但是在windows下需要安装vs并且还得做⼀些配置, 因为我服务的⼈都是在windows下办公, 需要让他们能够在windows下使⽤ltp, 所以才有了这篇笔记. 我的⽅案有两个:在win10 的bash下安装ltp, 然后启动ltp的server, 通过http协议来实现在windows下python调⽤ltp的⽅法.安装编译好的wheel(⽬前只有python3.6/3.5 amd64)(我推荐这种⽅案)我在⽂章最下⾯还引⽤了⼀种⽅法, 就是使⽤官⽅已经编译好的可执⾏exe⽂件, 直接在命令⾏(如cmd)下调⽤.第⼀种⽅案: bash下安装基本环境windows 10bash for windowspython 3.6安装bash on ubuntu on windows这个⼤家⾃⾏百度, 安装很简单.安装编译环境sudo apt install cmakesudo apt install g++安装过程⼤概⼗⼏分钟.下载ltp源码下载源码, 这是github地址.解压到你能记住的位置编译cd到源码⽬录, ⽐如我的⽬录:cd /mnt/d/bash-sites/ltp-3.4.0运⾏编译命令:./configuremake编译过程⼤概花费⼗⼏分钟. 现在我的⽬录⾥多了⼀个bin⽂件夹:drwxrwxrwx 0 root root 512 Jan 31 15:42 ./drwxrwxrwx 0 root root 512 Jan 31 15:30 ../-rwxrwxrwx 1 root root 800 Jan 31 15:30 appveyor.yml*-rwxrwxrwx 1 root root 0 Jan 31 15:30 AUTHORS*drwxrwxrwx 0 root root 512 Jan 31 15:53 bin/drwxrwxrwx 0 root root 512 Jan 31 15:42 build/-rwxrwxrwx 1 root root 29301 Jan 31 15:30 ChangeLog.md*drwxrwxrwx 0 root root 512 Jan 31 15:30 cmake/-rwxrwxrwx 1 root root 1439 Jan 31 15:30 CMakeLists.txt*drwxrwxrwx 0 root root 512 Jan 31 15:30 conf/-rwxrwxrwx 1 root root 131 Jan 31 15:30 configure*-rwxrwxrwx 1 root root 902 Jan 31 15:30 COPYING*drwxrwxrwx 0 root root 512 Jan 31 15:30 doc/-rwxrwxrwx 1 root root 79976 Jan 31 15:30 Doxyfile*drwxrwxrwx 0 root root 512 Jan 31 15:30 examples/-rwxrwxrwx 1 root root 1028 Jan 31 15:30 .gitignore*drwxrwxrwx 0 root root 512 Jan 31 15:42 include/-rwxrwxrwx 1 root root 85 Jan 31 15:30 INSTALL*drwxrwxrwx 0 root root 512 Jan 31 15:53 lib/-rwxrwxrwx 1 root root 965 Jan 31 15:30 Makefile*-rwxrwxrwx 1 root root 6639 Jan 31 15:30 NEWS.md*-rwxrwxrwx 1 root root 4750 Jan 31 15:30 README.md*drwxrwxrwx 0 root root 512 Jan 31 15:30 src/-rwxrwxrwx 1 root root 3048 Jan 31 15:30 subproject.d.json*drwxrwxrwx 0 root root 512 Jan 31 15:31 thirdparty/drwxrwxrwx 0 root root 512 Jan 31 15:31 tools/-rwxrwxrwx 1 root root 1372 Jan 31 15:30 .travis.yml*配置server⼀开始我启动server遇到了这个错误.[INFO] 2018-01-31 15:54:39 Loading segmentor model from "ltp_data/cws.model" ...[ERROR] 2018-01-31 15:54:39 /mnt/d/bash-sites/ltp-3.4.0/src/ltp/LTPResource.cpp: line 50:LoadSegmentorResource(): Failed to load segmentor model[ERROR] 2018-01-31 15:54:39 /mnt/d/bash-sites/ltp-3.4.0/src/ltp/Ltp.cpp: line 78: load(): in LTP::wordseg, failed to load segmentor resource[ERROR] 2018-01-31 15:54:39 /mnt/d/bash-sites/ltp-3.4.0/src/server/ltp_server.cpp: line 172: main(): Failed to setup LTP engine.因为缺少了模型⽂件, 在这⾥下载最新的模型⽂件.解压到/mnt/d/bash-sites/ltp-3.4.0/ltp_data/下, 这是ltp默认的数据模型存放位置.然后就能顺利启动服务器啦.syd@DESKTOP-J02R2VJ:/mnt/d/bash-sites/ltp-3.4.0$ ./bin/ltp_server --port 9090[INFO] 2018-01-31 15:56:36 Loading segmentor model from "ltp_data/cws.model" ...[INFO] 2018-01-31 15:56:36 segmentor model is loaded.[INFO] 2018-01-31 15:56:36 Loading postagger model from "ltp_data/pos.model" ...[INFO] 2018-01-31 15:56:36 postagger model is loaded[INFO] 2018-01-31 15:56:36 Loading NER resource from "ltp_data/ner.model"[INFO] 2018-01-31 15:56:36 NER resource is loaded.[INFO] 2018-01-31 15:56:36 Loading parser resource from "ltp_data/parser.model"[INFO] 2018-01-31 15:56:37 parser is loaded.[INFO] 2018-01-31 15:56:37 Loading srl resource from "ltp_data/pisrl.model"[dynet] random seed: 493907432[dynet] allocating memory: 2000MB[dynet] memory allocation done.[INFO] 2018-01-31 15:56:39 srl resource is loaded.[INFO] 2018-01-31 15:56:39 Resources loading finished.[INFO] 2018-01-31 15:56:39 Start listening on port [9090]...测试随便写个请求, 看看效果:import requestsimport jsonuri_base = "http://127.0.0.1:9090/ltp"data = {'s': '我认为他叫汤姆去拿外⾐和鞋⼦。
psychopy指导语 -回复
psychopy指导语-回复Psychopy是一款非常强大的心理学实验软件工具,它可以帮助研究人员设计和运行心理学实验。
本篇文章将一步步介绍如何使用Psychopy进行实验设计和运行。
第一步:了解Psychopy的基本操作和功能Psychopy是一个开源的心理学实验软件,它集成了一系列实验设计和运行工具。
在开始使用Psychopy之前,我们需要先下载并安装最新版本的软件。
一旦安装完成,你就可以启动软件并开始使用了。
第二步:创建一个新项目在Psychopy中,每个实验都是一个项目。
在创建新项目之前,切记先确定实验的目标和研究问题。
一旦你明确了实验的目标,可以按照以下步骤创建新项目:- 在Psychopy的主界面上点击"File",然后选择"New..."。
- 在弹出的对话框中,输入项目名称和存储路径,然后点击"OK"。
第三步:设计实验任务在Psychopy中设计实验任务可以通过两种方式来实现:可视化接口或Python代码。
这两种方式各有优劣,你可以根据自己的需要选择其中一种。
使用可视化接口设计实验任务的步骤如下:1. 点击Psychopy主界面上的"Builder"按钮,进入可视化接口。
2. 在Builder界面上,你可以通过拖拽组件来创建实验任务的各个部分,如刺激呈现、响应收集和实验流程等。
3. 可以根据需要定制每个组件的属性和参数,如呈现持续时间、刺激类型和键盘响应等。
4. 最后,点击"File",然后选择"Save"保存实验任务。
使用Python代码设计实验任务的步骤如下:1. 点击Psychopy主界面上的"Coder"按钮,进入代码编辑界面。
2. 在代码编辑界面上,你可以使用Python代码来编写实验任务的各个部分,如刺激呈现、响应收集和实验流程等。
如何建立多用户
一、如何建立多用户提醒大家一句,别一直使用root用户,因为root用户在系统中有着至高无上的权力,一不小心就可能破坏系统。
比如我们想删除/temp目录下的文件却将命令不小心输成“rm / temp(在‘/’后多了一个空格)”,那么就极可能删去根目录下的所有文件。
再者,“Linux 是一个真正意义上的多任务、多用户系统”,不体会一下Linux的特色岂不可惜。
为了方便自己和别人使用,就在Linux系统下多建几个用户吧。
输入“adduser newuser”,回车,屏幕对命令没有一点儿反应,错啦?不,实际上,系统已接受了新用户。
你应该接着输入命令“passwd newuser”,屏幕将提示输入口令,再次输入确认,一个新的用户就增加成功,真简单。
马上登录试一试吧。
Linux提供了六个虚拟控制台,用ALT+F1~F6切换(在X-window下用CRTL+ALT+F1~F6切换),每个控制台均可以用不同的用户登录,运行不同的程序。
赶快为家人和朋友建个用户吧。
二、在Linx命令行下依次运行:cd/tar xzvf rmp-2.3.11.tar.gzcd rpm-2.3.11./configuremakemake installmkdir /var/local /var/local/lib /var/local/lib/rpm /var/lib/rpm这样,你就完成了RPM的安装,以后便可以在网上或光盘上寻找软件的RPM安装版。
然后使用RPM进行安装,RPM的使用方法很简单:1. 用RPM安装软件包:rpm -ivh 软件文件名例如rpm -ivh fvwm95-2.0.43a.chinese-1.i386.rpm 屏幕上就会输出该软件包的名称和安装的进度条:fvwm95 ###############当进度条走到底,中文fvwm95(一种X-Window的界面)就安装完了,再运行X-Window,啊,全中文的fvwm95就在我的眼前。
gittoolbox 插件用法
gittoolbox 插件用法Git Toolbox是一个用于优化和简化Git操作的插件。
它提供了一些有用的功能和工具,使得在Git仓库中进行版本控制更加高效和便捷。
Git Toolbox插件的使用方式很简单。
首先,确保你已经安装了IntelliJ IDEA或者Android Studio这两个主要的集成开发环境。
然后,按照以下步骤来使用Git Toolbox插件:1. 在IDE中安装Git Toolbox插件。
打开IDE的“设置”或“首选项”面板,选择“插件”选项,然后搜索并安装“Git Toolbox”插件。
2. 在IDE的工具栏中找到Git Toolbox图标,点击打开插件的界面。
3. 在Git Toolbox界面的顶部,你可以看到当前项目的Git仓库状态。
它会显示当前分支、未跟踪的文件、已修改的文件等等。
这对于快速了解当前项目的状态非常有帮助。
4. 在右侧的工具栏中,你可以找到一些常用的Git操作。
例如,你可以使用"Commit"按钮来提交当前的修改,使用"Push"按钮来将本地提交推送到远程仓库,使用"Pull"按钮来拉取远程仓库的更新等等。
这些按钮都是直观且易于使用的,使得Git操作更加简单快捷。
5. 在Git Toolbox界面的底部,你可以找到一些其他功能选项。
例如,你可以通过点击"Log"按钮来查看项目的提交历史记录,通过点击"Branches"按钮来管理分支,通过点击"Stash"按钮来管理保存的代码片段等等。
通过使用Git Toolbox插件,你可以更轻松地进行Git操作,提高开发效率,并确保项目的版本控制过程更加流畅和可靠。
它为开发人员提供了直观易用的界面和便捷的功能,使得Git的使用变得简单而高效。
无论是在个人项目还是团队协作中,Git Toolbox都是一个强大而实用的插件。
sdmtoolbox用法

sdmtoolbox用法SDM Toolbox是一款功能强大的软件开发工具,主要用于嵌入式系统的设计、开发和测试。
本文将详细介绍SDM Toolbox的安装与配置、主要功能及用法,并通过实战案例帮助读者更好地掌握这款工具。
一、SDM Toolbox简介SDM Toolbox是由美国国家仪器(National Instruments)公司推出的一款集成开发环境(IDE),适用于嵌入式系统的设计与开发。
它具有丰富的功能,可以大大提高开发效率,降低开发成本。
SDM Toolbox支持多种编程语言,如C、C++、Python等,同时还提供了丰富的硬件驱动和库,便于开发者快速实现各种嵌入式应用。
二、SDM Toolbox安装与配置1.下载安装包:访问National Instruments官网,根据您的需求选择合适的版本下载。
2.安装过程:运行安装包,按照提示完成安装。
需要注意的是,在安装过程中,确保安装路径中不要含有中文字符,以免出现兼容性问题。
3.配置:安装完成后,打开SDM Toolbox,根据实际需求配置硬件驱动、编译器等。
如有需要,可以参考官方文档或在线教程进行详细配置。
三、SDM Toolbox主要功能及用法1.项目管理:SDM Toolbox支持项目管理,可以方便地组织和管理项目文件。
2.代码编辑:支持多种编程语言,提供智能提示、代码自动补全等功能,提高编程效率。
3.调试:支持实时调试,可以实时监控程序运行状态,快速定位和修复问题。
4.仿真:提供丰富的硬件仿真功能,可在不实际搭建硬件的情况下进行功能验证。
5.绘图:支持创建各种图表,便于展示数据分析结果。
6.库管理:提供丰富的库和驱动,方便开发者快速实现各种功能。
四、SDM Toolbox实战案例以下以一个简单的示例说明SDM Toolbox的用法:假设我们要实现一个基于Arduino的温度控制系统,步骤如下:1.创建项目:在新建项目中添加源文件(如main.cpp)、配置文件(如config.h)等。
Psychtoolbox教程
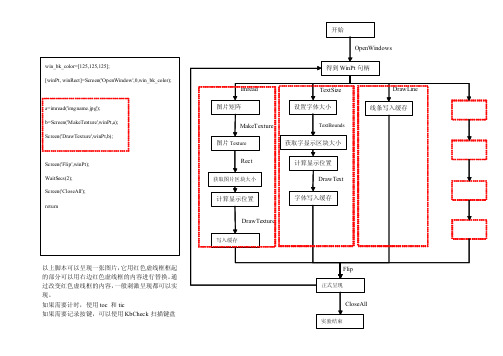
win_bk_color=[125,125,125]; [winPt, winRect]=Screen('OpenWindow',0,win_bk_color);
a=imrea d('img name .jp g'); b=Screen('M akeTexture',winPt,a); Screen('DrawTexture',winPt,b);
% 画线或者填充的形状 currentbuffer = Screen('SelectStereoDrawBuffer', windowPtr);详细 Screen('DrawLine', windowPtr [,color], fromH, fromV, toH, toV);详细 Screen('DrawArc',windowPtr,[color],[rect],startAngle,arcAngle)详细 Screen('FrameArc',windowPtr,[color],[rect],startAngle,arcAngle)详细 Screen('FillArc',windowPtr,[color],[rect],startAngle,arcAngle)详细 Screen('FillRect', windowPtr );详细 Screen('FrameRect', windowPtr );详细 Screen('FillOval', windowPtr );详细 Screen('FrameOval', windowPtr );详细 Screen('FramePoly', windowPtr);详细 Screen('FillPoly', windowPtr);详细
python catalyst库用法 -回复

python catalyst库用法-回复Python Catalyst 库用法详解【什么是Catalyst库?】Catalyst是一个用于深度学习和强化学习的Python库,其主要特点是高效、灵活和易于使用。
它提供了一个丰富的工具箱,可以用来构建、训练和测试各种机器学习模型。
Catalyst库还包含了许多预定义的模型架构和损失函数,以及用于数据预处理和增强等功能。
在本文中,我们将逐步探讨Catalyst库的用法,帮助读者更好地了解和应用该库。
【安装Catalyst库】要使用Catalyst库,首先需要安装它。
可以使用pip命令在终端或命令行中安装Catalyst库。
具体操作步骤如下:pip install catalyst【使用Catalyst库】安装完成后,我们可以开始使用Catalyst库来构建机器学习模型。
下面将引导您一步一步了解Catalyst库的用法。
步骤1: 导入必要的库和模块首先,我们需要导入Catalyst库和其他必要的Python库和模块。
可以按照以下示例代码导入Catalyst库和其他库:pythonimport torchfrom torch import nnfrom torch.optim import Adamfrom torch.utils.data import DataLoaderfrom torchvision.datasets import MNISTfrom torchvision.transforms import ToTensorfrom catalyst import dl步骤2: 定义模型定义机器学习模型是使用Catalyst库的第一步。
可以使用torch.nn 模块中的各种类来构建模型。
下面是一个使用Catalyst库构建的简单的卷积神经网络(CNN)模型的示例:pythonclass SimpleCNN(nn.Module):def __init__(self):super(SimpleCNN, self).__init__()self.conv1 = nn.Conv2d(1, 16, kernel_size=3, padding=1)self.pool = nn.MaxPool2d(2)self.flatten = nn.Flatten()self.fc1 = nn.Linear(16*14*14, 10)def forward(self, x):x = self.conv1(x)x = self.pool(x)x = self.flatten(x)x = self.fc1(x)return xmodel = SimpleCNN()步骤3: 准备数据在使用Catalyst库之前,我们需要准备训练和测试数据。
Toolbox使用说明(快思聪编程系列)

Toolbox使⽤说明(快思聪编程系列)Toolbox使⽤说明Toolbox是快思聪公司新近推出的⼀款集成多种调试功能于⼀体的⼯具软件,它可以实现多种硬件检测,调试功能。
完全可替代Viewport实现相应的功能。
它提供了有Text Console,SMW Program Tree, Network Device Tree, Script Manager, System Info, File Manager, Network Analyzer,Video Test Pattern多个检测调试⼯具,其中Text Console主要执⾏基于⽂本编辑的命令;SMW Program Tree主要罗列出相应Simpl Windows程序中设计到的相关快思聪设备,并可对显⽰出的相关设备进⾏效验,更新Firmware,上传Project 等操作;Network Device Tree主要使⽤于显⽰检测连接到Cresnet⽹络上相关设备,可对⽹络上设备进⾏ID 设置,侦测设备线路情况;Script Manager主要⽤于运⾏脚本命令;System Info则⽤于显⽰联机的控制系统软硬件信息,也可对相应信息进⾏修改,刷新;File Manager显⽰控制系统主机内存⽂件系统信息,可进⾏修改,建⽴等管理操作;Video Test Pattern则⽤于产⽣⼀个测试图调较屏幕显⽰;Network Analyzer⽤于检测连接到Cresnet⽹络上所有设备的通信线路情况。
以上⼤致介绍了Toolbox中各⼯具软件的⽤途,下⾯将分别讲述⼀下各⼯具的实际⽤法。
⾸先按照提⽰信息将Toolbox安装到Crestron⽬录下,在PC开始菜单中找到Toolbox菜单项,激活显⽰如下图所⽰(图⼀)Toolbox运⾏窗⼝可以看到,Toolbox运⾏窗⼝中分为菜单栏,⼯具栏,状态栏及显⽰窗⼝四部分。
其中⼯具栏上所有快捷图标实现的功能都可对应的在菜单栏中找到相应选项。
基于模型设计—自定义目标系统配置指南
rtwgensettings.SelectCallback = ['htgt_callback_handler(hDlg, hSrc)'];
表示当中 htgt.tlc 文件时所对应执行的回调函数,即当选择 htgt 目标系统的时候 matlab 将自定执行 htgt_callback_handler 函数中的程序,该程序主要是对一些目标系统 的常用默认设置项进行设置,后文将详述。
4
基于模型设计—自定义目标系统配置指南
图 1-3 c166、mpc555 目标系统组成文件
2、自定义目标系统创建过程及详细解释
以上内容纯属扯淡,下面开始进入正题。 这部分内容以 Embedded_Targets_Development_Guide.zip 中 mathworks 工程师的 ppt 讲稿为基础,讲述自定义目标系统创建过程。 (其实就是把他的内容翻译下,再加上详细的注释和自己的心得,各位看官表说我 抄袭,因为我本来就没说是原创~~~~) /support/solutions/en/data/1-BHU00D/index.html?product=R T
系统目标文件是用于控制整个目标系统的代码生成过程,打开 htgt.tlc 和 c166.tlc 对比,会发现二者非常多的相似处,因为他们是用于设置一些最最基本的内容,下面开 始介绍 htgt.tlc 文件的具体含义。
htgt.tlc——见附近 c166.tlc——见 matlabroot \toolbox\rtw\targets\c166\c166 要想在目标选择窗口中看到自定义的目标系统还需要把系统目标文件(tlc 文件)所 在的目录添加到 matlab path 中。 如:addpath(‘C:\Users\Godman\Desktop\Matlab 底层驱动 \Embedded_Targets_Development_Guide\htgt’)
sdmtoolbox用法 -回复
sdmtoolbox用法-回复smdtoolbox是一个用于声学信号处理的开源软件包,它提供了各种有用的工具和函数,可以用于分析、处理和处理声音信号数据。
这个软件包被广泛应用于研究和工业应用中,因为它提供了许多强大而灵活的功能。
本文将介绍一些常见的sdmtoolbox用法,并提供详细的步骤和示例。
我们将从安装软件包和导入所需库开始,然后介绍几个常用的工具和技术。
首先,我们需要安装smdtoolbox软件包。
可以在Python的包管理器中通过运行以下命令来安装:pip install sdmtoolbox安装完成后,我们可以在Python脚本中导入所需的库:pythonimport sdmtoolbox as sdmimport numpy as npimport matplotlib.pyplot as plt现在,我们准备好开始使用smdtoolbox了。
下面是一些常见的用法示例。
1. 数据处理:sdmtoolbox提供了各种用于处理声学数据的函数。
例如,我们可以使用`read_acoustic_data()`函数从文件中读取声音数据,并使用`normalize()`函数对数据进行归一化处理。
以下是一个示例:pythondata, samplerate = sdm.read_acoustic_data("example.wav") normalized_data = sdm.normalize(data)2. 频谱分析:sdmtoolbox提供了一些用于频谱分析的函数。
例如,我们可以使用`spectrogram()`函数计算音频数据的频谱,并使用`plot_spectrogram()`函数将其可视化。
以下是一个示例:pythonspectrogram_data = sdm.spectrogram(data, samplerate)sdm.plot_spectrogram(spectrogram_data)3. 声学特征提取:smdtoolbox还提供了许多用于提取声学特征的函数。
Siemens S7-1200 PLC 安装指南说明书
T ABLE OF CONTENTS How To Use This User Guide (iv)Assumptions (iv)Contents of This Manual (iv)Installation Process Overview (v)Installation Preparation (v)Chapter 1—Introduction (1)Chapter Objective (1)Product Description (1)Features (1)Following Option (SXF) (2)Chapter 2—Getting Started (3)Chapter Objectives (3)What You Should Have (3)High and Low Power Drives (3)Chapter 3—Installation (9)Chapter Objectives (9)Installation Precautions (9)Environmental Considerations (9)Wiring Considerations (9)Preventing Electrical Noise Problems (10)Installation Overview (10)Series vs. Parallel Motor Wiring (11)Motor Configurations (12)Configuration of the Drive (19)Fan Connection (20)I/O Connections (20)OPTO1 (24)CW and CCW Limits (25)OPTO2 (25)O1—O4 Outputs (27)Encoder Connections (28)Incremental Encoder Connection (29)Absolute Encoder Connection (29)AC Power Connection (30)Transformers (30)Transformer Specifications (30)Power Ratings (31)Installation Verification (33)Input Conventions (33)Output Conventions (33)Fault Output Convention (34)Motor Test (34)Incremental Encoder Test (34)Absolute Encoder Test (35)Drive Mounting (35)Minimum Width (35)Minimum Depth (35)Attaching the Load (37)Contents iCouplings (37)Tuning (38)Resonance (38)Mid-Range Instability (38)Tuning Procedures (38)Motor Waveforms (40)Anti-Resonance (40)Chapter 4—Application Design (41)Chapter Objectives (41)Motion Profile Application Considerations (41)Preset Mode Moves (42)Incremental Mode Preset Moves (42)Absolute Mode Preset Moves (42)Continuous Mode Moves (43)Closed Loop Operation (44)Setting Encoder Resolution (45)Encoder Step Mode (45)Motion Programs and Sequences (56)Sequence Commands (56)Creating and Executing Sequences (58)Subroutines (59)Sequence Debugging Tools (63)High-Level Programming Tools (67)Complex Branching and Looping (70)Conditionals (71)Error Flag (75)Branching Using Variables and Boolean Logic (76)Motion Profiling Mode—On-the-Fly Changes (77)Interfacing to the SX (81)Programmable Inputs and Outputs (81)PLC Operation (94)Rotary vs. Linear Indexers (97)Chapter 5—SXF Follower (99)Chapter Objectives (99)What is Following? (99)Types of Following (100)Velocity Following (100)Position and Velocity Following (103)Recede and Advance While Following (115)Synchronization (132)Other Following Features (135)Following Equation and Command Summary (137)Chapter 6—Hardware Reference (143)Chapter Objectives (143)Environmental Specifications (143)Drive Electrical Specifications (143)I/O Electrical Specifications (144)Motor Electrical Specifications (147)Operational Specifications (147)Motor Current & Torque (148)Drive Dimensions (149)Motor Dimensions (150)DIP Switch Summary (152)Non-Compumotor—Drive/Motor Connection (155)Wiring Configurations.............................................................................................................................155, 156 Terminal Connections. (157)Non-Compumotor Motors—Setting Motor Current (158)Motor Performance Specifications (158)ii SX/SXF Indexer/Driver User GuideChapter 7—Maintenance & Troubleshooting (161)Chapter Objectives (161)Maintenance (161)Battery Maintenance (161)Drive Maintenance (161)Motor Maintenance (162)Common Problems and Solutions (163)Software Debugging Tips (165)Returning the System (167)Appendices (169)Command Listing (169)SX Example Programs (171)Appendix C—LVD Installation Instructions (175)Complying with the Low Voltage Directive (LVD) (175)Additional Installation Procedures for LVD Compliance (175)Table of Graphic Symbols and Warnings (177)Index (179)Contents iiiHow To Use This User GuideThis user guide is designed to help you install, develop, and maintain your system. Each chapterbegins with a list of specific objectives that should be met after you have read the chapter. Thissection is intended to help you find and use the information in this user guide. AssumptionsThis user guide assumes that you have the skills or fundamental understanding of the followinginformation.t Basic electronics concepts (voltage, switches, current, etc.)t Basic motion control concepts (torque, velocity, distance, force, etc.)Contents of This ManualThis user guide contains the following information.Chapter 1:IntroductionThis chapter provides a description of the product and a brief account of its specific features.Chapter 2:Getting StartedThis chapter contains a detailed list of items you should have received with your SX shipment. Itwill help you to become familiar with the system and ensure that each component functions properly.Chapter 3:InstallationThis chapter provides instructions for you to properly mount the system and make all electricalconnections. Upon completion of this chapter, your system should be completely installed and readyto perform basic operations. Tuning considerations and procedures are also provided.Chapter 4:Application DesignThis chapter will help you customize the system to meet your application’s needs. Importantapplication considerations are discussed. Sample applications are provided.Chapter 5:SXF FollowerThis chapter explains the SXF Following function and the SXF’s capability to support absolute andincremental encoders.Chapter 6:Hardware ReferenceThis chapter contains information on system specifications (electrical, dimensions, and perfor-mance). It may be used as a quick-reference tool for proper switch settings and connections.Chapter 7:TroubleshootingThis chapter contains information on identifying and resolving system problems.iv SX/SXF Indexer/Driver User GuideInstallation Process OverviewTo ensure trouble-free operation, pay special attention to the environment in which the SX equip-ment will operate, the layout and mounting, and the wiring and grounding practices used. Theserecommendations are intended to help you easily and safely integrate SX equipment into yourmanufacturing facility. Industrial environments often contain conditions that may adversely affectsolid-state equipment. Electrical noise or atmospheric contamination, may also affect the SXSystem.Developing Your ApplicationBefore you attempt to develop and implement your application, there are several issues that youshould consider and address.Recognize and clarify the requirements of your application. Clearly define what you expect the system todo.Assess your resources and limitations. This will help you find the most efficient and effective means ofdeveloping and implementing your application (hardware and software).Follow the guidelines and instructions outlined in this user guide. Do not skip any steps or procedures.Proper installation and implementation can only be ensured if all procedures are completed in the propersequence.Installation PreparationBefore you attempt to install this product, you should complete the following steps:Review this entire user guide. Become familiar with the user guide’s contents so that you can quickly findthe information you need.Develop a basic understanding of all system components, their functions, and interrelationships.Complete the basic system configuration and wiring instructions (in a simulated environment, not apermanent installation) provided in Chapter 2, Getting Started.Perform as many basic functions as you can with the preliminary configuration. You can only perform thistask if you have reviewed the entire user guide. You should try to simulate the task(s) that you expect toperform when you permanently install your application (however, do not attach a load at this time). Thiswill give you a realistic preview of what to expect from the complete configuration.After you have tested all of the system’s functions and used or become familiar with tll of the system’sfeatures, carefully read Chapter 3, Installation.After you have read Chapter 3 and clearly understand what must be done to properly install the system,you should begin the installation process. Do not deviate from the sequence or installation methodsprovided.Before you begin to customize your system, check all of the systems functions and features to ensure thatyou have completed the installation process correctly.The successful completion of these steps will prevent subsequent performance problems and allowyou to isolate and resolve any potential system difficulties before they affect your system’soperation.ConventionsTo help you understand and use this user guide effectively, the conventions used throughout this userguide are explained in this section.CommandsAll commands that you are instructed to enter are shown in capital letters. The symbol >, is the SXcommand prompt. The command is displayed in boldface. A delimiter (space or carriage return) isrequired after each command. A description is provided next to each command example.Command Description>MR Sets motor resolution to 25,000 steps/revThe system ignores command syntax that is not within the valid range for a specific command. A ?prompt will be returned by the drive when the last command entered was not understood, or aparameter limit was exceeded.Contents vMotorsS Series and SX Series motors are one in the same (interchangeable terms).Warnings & CautionsWarning and caution notes alert you to possible dangers that may occur if you do not follow instruc-tions correctly. Situations that may cause bodily injury are present as warnings. Situations that maycause system damage are presented as cautions. These notes will appear in bold face and the wordwarning or caution will be centered and in all capital letters. Refer to the examples shown below:WARNINGDo not touch the motor immediately after it has been in use for an extended period of time. The motormay be hot.CAUTIONSystem damage will occur if you power up the system improperly.Related Publicationst Current Parker Compumotor Motion Control Catalogt SX Indexer/Drive Software Reference Guidevi SX/SXF Indexer/Driver User Guide。
tensor toolbox使用手册
tensor toolbox使用手册摘要:1.Tensor Toolbox 简介2.Tensor Toolbox 的安装与配置3.Tensor Toolbox 的主要功能与应用4.Tensor Toolbox 的使用示例5.Tensor Toolbox 的优势与不足正文:【1.Tensor Toolbox 简介】Tensor Toolbox 是一个用于机器学习和深度学习的Python 库。
它提供了许多用于创建、操作和训练深度学习模型的工具和函数。
Tensor T oolbox 的设计初衷是让机器学习和深度学习的开发者能够更轻松地构建、训练和优化他们的模型,从而提高模型的性能和效率。
【2.Tensor Toolbox 的安装与配置】Tensor Toolbox 可以通过pip 安装。
在终端或命令行中输入以下命令即可安装Tensor Toolbox:```pip install tensor-toolbox```安装完成后,需要在Python 代码中导入Tensor Toolbox 库才能使用。
在Python 代码中输入以下命令即可导入Tensor Toolbox 库: ```import tensor_toolbox as tt```【3.Tensor Toolbox 的主要功能与应用】Tensor Toolbox 提供了许多功能,包括但不限于以下几个方面:- 张量操作:Tensor Toolbox 提供了许多用于操作张量的函数,例如张量的加法、减法、乘法、除法等。
- 优化器:Tensor Toolbox 提供了多种优化器,例如梯度下降、Adam、RMSProp 等,用于优化深度学习模型的权重和偏置。
- 损失函数:Tensor Toolbox 提供了多种损失函数,例如均方误差、交叉熵等,用于衡量深度学习模型的性能。
- 数据预处理:Tensor Toolbox 提供了许多用于数据预处理的函数,例如数据增强、数据标准化等,用于提高深度学习模型的泛化能力。
llvm filecheck使用指导

LLVM FileCheck 是一个用于验证LLVM 代码的工具,它可以检查代码中的特定模式和属性。
以下是使用LLVM FileCheck 的基本指导:1. 安装LLVM:首先,您需要在您的系统上安装LLVM。
LLVM 可以从其官方网站下载和安装。
2. 安装FileCheck:FileCheck 是LLVM 的一部分,因此不需要单独安装。
在LLVM 的安装目录中,您应该能够找到FileCheck 工具。
3. 编写测试文件:创建一个包含测试用例的文件,其中包含要检查的模式和属性。
测试用例可以使用FileCheck 的自定义标记来定义模式和属性。
4. 运行FileCheck:使用FileCheck 工具运行测试文件。
在终端中,导航到测试文件所在的目录,并执行以下命令:```php<llvm_install_path>/bin/llvm-lit -test-suite=<test_suite_path>```其中`<llvm_install_path>` 是LLVM 的安装路径,`<test_suite_path>` 是测试文件的路径。
5. 查看结果:FileCheck 将检查测试用例中的模式和属性,并在终端中显示结果。
如果测试用例通过验证,将显示通过消息。
如果有任何错误或不匹配项,将显示相应的错误消息。
这只是一些使用LLVM FileCheck 的基本指导。
具体使用可能会因您正在测试的代码和所需验证的内容而有所不同。
有关更详细的信息,请参阅LLVM 的官方文档或查看FileCheck 的源代码和文档。
Psychtoolbox教程
%文件操作 FID =FOPEN(FILENAME,PERMISSION)详细 [A,COUNT] =FSCANF(FID,FORMAT,SIZE)详细 FPRINTF(FID, FORMAT, A, ...)详细 ST =FCLOSE(FID)详细
详细介绍
[windowPtr,rect]=Screen('OpenWindow',windowPtrOrScreenNumber [,color] [,rect][,pixelSize][,numberOfBuffers][,stereomode][,multisample][,imagingmode][,specialFlags]); 返回
Sc reen('Fli p ',winPt ); WaitSecs(2); Screen('CloseAll'); return
以上脚本可以呈现一张图片,它用红色虚线框框起 的部分可以用右边红色虚线框的内容进行替换。通 过改变红色虚线框的内容,一般刺激呈现都可以实 现。 如果需要计时,使用 toc 和 tic 如果需要记录按键,可以使用 KbCheck 扫描键盘
%获取鼠标和键盘输入 [x,y,buttons,focus,valuators,valinfo] = GetMouse()详细 [keyIsDown, secs, keyCode, deltaSecs] = KbCheck()详细
%时间 wakeup=WaitSecs(s) 详细 TSTART =TIC 详细 T =TOC 详细
win_bk_color=[125,125,125]; [winPt, winRect]=Screen('OpenWindow',0,win_bk_color);
米思齐(Mixly)下载、安装及基本操作

米思齐M i x l y软件下载与安装米思齐软件界面介绍及基本操作陆续更新arduino uno,和mixly。
适合学生入门的课程!下载软件【Window系统地址1】 Mixly For Win7or10 http://116.62.49.166/Mixly_WIN.7z【Window系统地址2】 Mixly For Win7or10https:///download/Mixly_WIN.7z【Mac系统】 Mixly For Machttps://116.62.49.166/MixlyMac.zip更新软件Mixly软件的更新是基于git设计的,每次更新会自动对比最新版与用户使用的版本的差异,只更新差异文件,避免重复下载造成版本混乱。
先关闭Mixly软件,再运行一键更新.bat或update.bat 启动更新程序。
驱动安装开发板与电脑连接通讯需要安装相应的串口芯片驱动,常用的串口芯片驱动有CH340和CP2102。
在arduino/drivers目录中可以找到这两种串口芯片驱动。
支持板卡从语言上来说,Mixly目前支持Arduino、MicroPython、Python三种语言。
当我们开始使用Mixly编写程序时,需要先在Mixly软件右下角选择正确的板卡。
Arduino板卡该类别下采用Arduino编程,支持板卡如下:• Arduino/Genuino Uno•Arduino Nano•Arduino/Genuino Mega or Mega 2560•Arduino Leonardo•Generic ESP8266 Module •NodeMCU 1.0 (ESP-12E Module)•LOLIN(WEMOS) D1 R2 & mini•WeMos D1 R1•ESP32 Dev Module•Arduino MixGo•Arduino HandBit。
tessy安装流程以及使用
tessy安装流程以及使用下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by theeditor. I hope that after you download them,they can help yousolve practical problems. The document can be customized andmodified after downloading,please adjust and use it according toactual needs, thank you!In addition, our shop provides you with various types ofpractical materials,such as educational essays, diaryappreciation,sentence excerpts,ancient poems,classic articles,topic composition,work summary,word parsing,copy excerpts,other materials and so on,want to know different data formats andwriting methods,please pay attention!Tessy 安装流程。
1. 检查系统要求,确保您的系统符合 Tessy 的最低系统要求。
_get_build_requires_wheel 用处 -回复

_get_build_requires_wheel 用处-回复_get_build_requires_wheel 用处及步骤Python是一种广泛使用的编程语言,拥有一个庞大而活跃的开发社区。
许多开发者都在开发或维护各种Python软件包和模块,以帮助其他开发者更好地完成他们的工作。
在Python中,软件包是一种封装了功能的代码集合,可以供其他人使用。
在开发Python软件包时,它可能依赖于其他的软件包。
在这种情况下,_get_build_requires_wheel函数可以起到帮助开发者自动化依赖管理的作用。
本文将介绍_get_build_requires_wheel函数的用处,并逐步解释如何使用它。
第一部分:介绍_get_build_requires_wheel函数_get_build_requires_wheel是一个在Python中使用的函数,用于获取一个软件包构建所需的依赖项。
它可以用于生成软件包构建过程中所需的所有依赖项的列表。
这些依赖项包括其他Python软件包、操作系统库或其他软件。
第二部分:使用_get_build_requires_wheel函数的步骤在下面的步骤中,将详细说明如何使用_get_build_requires_wheel 函数。
步骤1:安装setuptools首先,确保已经安装了setuptools库。
该库是Python中管理软件包和依赖项的重要组件。
可以使用以下命令在命令行中安装setuptools:pip install setuptools步骤2:创建一个新的Python软件包在继续使用_get_build_requires_wheel函数之前,我们需要创建一个新的Python软件包。
可以使用以下命令在命令行中创建一个新的软件包:mkdir mypackagecd mypackage步骤3:创建一个setup.py文件在mypackage目录中,创建一个名为setup.py的文件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Psychtoolbox安装步骤
1、依次安装3个兼容文件CompatableFiles文件夹中的
→
→
(建议均选择默认安装路径~)
2、在MATLAB中setpath psychtoolbox
(Psychtoolbox文件夹路径建议不放在MATLAB安装时产生的toolbox里面~)
3、在MATLAB中运行psychtoolbox文件夹下的setup……脚本
命令框中出现Before you decide to delete the paths, do you want to see them (yes or no)?
输入no回车确定,然后出现Shall I delete all those instances from the MATLAB/OCTAVE path (yes or no)?
输入yes后回车确定
稍等片刻,美味马上就好^V^ ~~~
当出现选择return或者enter的时候按回车确定
再稍等一下下,最后出现enjoy的时候
恭喜你~安装完成了~
4、验证安装psychtoolbox是否成功
打开运行,这个是定位V1的楔形闪烁视觉刺激,看能不能正常运行吧~ 我目前已知Win7+Matlab2010、Win7+Matlab2009、Win8+Matlab2013、Win7+Matlab2014均可完美运行~据说XP系统不用安装兼容文件且稳定运行,未实践~
5、最后提醒一句,在调用psychtoolbox时候运行程序中途想要退出,按ctrl+C是不行滴,这个时候就需要启用任务管理器了T^T…不过可以在脚本中加入escape的相关语句在恰当的时间按Esc就可以退出了,我还没具体看这个语句,暂时先不写了,就先用任务管理器中途退出吧~
祝大家学习愉快~~~。