点─面接触分析
ANSYS Workbench 19.0基础入门与工程实践 第7章 接触分析

3.无摩擦
• 无摩擦接触,即两接触体之间是理想状态。当外力作用时,两接触体可以发生 分离和相对滑动,当两物体分离后,法向作用力减为0,两物体接触滑动时处 于理想状态,不产生摩擦力作用。
4.静摩擦
• 模拟静摩擦的场景,当两物体之间不发生相对滑动但是存在静摩擦力的时候, 可以使用本接触类型进行设置,可以理解为两物体之间的静摩擦力需要多大就 提供多大。
• 7.3.2 几何建模 • 7.3.3 材料属性设置 • 7.3.4 接触设置 • 7.3.5 网格划分 • 7.3.6 载荷及约束设置 • 7.3.7 模型求解 • 7.3.8 结果后处理
7.4 接触分析实例——螺栓连接
• 螺栓连接在接触问题中非常典型,本例将以螺栓连接为对象,详细介绍如何加 载预紧力、设置螺栓连接接触类型等常见技术问题,为读者进行螺栓连接分析 提供指导。
5.摩擦接触
• 通用摩擦接触,既包含静摩擦也包含滑动摩擦,在接触初始时,两接触体是静摩擦状态,当 外界作用力增大且使两接触体发生相对滑动时,此时产生滑动摩擦,滑动摩擦力基于F=计算, 用户在定义该接触类型时需要定义接触面之间的摩擦系数。
6.滑动摩擦
• 直接滑动摩擦接触是指接触体之间不发生静摩擦作用的阶段。该接触类型只针 对刚体动力学分析,系统接触力与法向正压力成正比。
• 支座及底板材质为结构钢材,在WB 19.0中默认即可;螺栓材质选用45号钢,其材料属性参 数:Ε=209000MPa,泊松比μ=0.269。
• 7.4.4 接触设置 • 7.4.5 网格划分 • 7.4.6 载荷及约束设置 • 7.4.7 模型求解 • 7.4.8 结果后处理
7.5 本章小结
• 本章先对接触问题的基本概念和模型进行介绍,让读者对有限元接触有一个概 念性的了解。然后通过两个实例分析,详细介绍如何在WB 19.0中进行含非线 性接触问题的仿真设置和操作,并对WB 19.0中提供的各类接触模型及接触类 型进行逐一讲解,使读者掌握如何选择接触类型、设置接触参数、查看接触产 生的各种结果类型,最终完成整个接触项目的仿真。
13-接触分析

ANSYS培训教程 – 版本 5.5 – XNJTU AME By: Guozheng Kang
Stru-6
•当凸面和平面或凹面接触时,应指定平面或凹 当凸面和平面或凹面接触时, 当凸面和平面或凹面接触时 面作为目标面; 面作为目标面; •细网格所在面为接触面,粗网格面为目标面; 细网格所在面为接触面, 细网格所在面为接触面 粗网格面为目标面; •较硬者为目标面,较软者为接触面; 较硬者为目标面, 较硬者为目标面 较软者为接触面; •基础单元为高阶单元的面为接触面,为低阶单 基础单元为高阶单元的面为接触面, 基础单元为高阶单元的面为接触面 元的面为目标面; 元的面为目标面; •大面作为目标面,小面作为接触面。 大面作为目标面, 大面作为目标面 小面作为接触面。 STEP4:定义刚性目标面 : 利用Targe169(2-D)和 Targe170(3-D)来表示 : 来表示: 利用 和 来表示 对2-D,目标面的形状可以通过一系列直线、圆 ,目标面的形状可以通过一系列直线、 弧和抛物线来描述; 弧和抛物线来描述;对3-D,目标面形状可以通 , 过三角面、圆柱面、圆锥面和球面来描述。 过三角面、圆柱面、圆锥面和球面来描述。 1、控制节点 节点) 、控制节点(Pilot节点 节点
ANSYS培训教程 – 版本 5.5 – XNJTU AME By: Guozheng Kang Stru-2
Contact48和 49是点 面的接触单元 。 同样 , 和 是点 面的接触单元。 同样, 是点-面的接触单元 也可以由该单元来模拟面-面的接触行为 面的接触行为, 也可以由该单元来模拟面 面的接触行为,如 将插头插到插座里这样的问题。 将插头插到插座里这样的问题。 三、面-面接触单元 面接触单元 ANSYS支持刚 柔 、 柔 -柔的面 面接触单元 , 支持刚-柔 柔的面-面接触单元 支持刚 柔的面 面接触单元, 刚性面被当作“ 目标” 面分别用Targe169和 刚性面被当作 “ 目标 ” 面分别用 和 Targe170来模拟 来模拟2-D和 3-D的 “ 目标 ” ; 柔性 来模拟 和 的 目标” 体的表面被当作“接触“ 体的表面被当作 “ 接触 “ 面 , 用 Conta171(2D) 、 Conta172(2-D) 、 Conta173(3-D) 、 Conta174(3-D)来模拟。 程序通过一个共享的 来模拟。 来模拟 实常数号来识别“ 接触对” 实常数号来识别 “ 接触对 ” , 因此目标单元 和接触单元应具有相同的实常数号。 和接触单元应具有相同的实常数号。
第9讲_接触问题分析

接触面
目标面 接触面 目标面 接触面
接触面
目标面
目标面 硬面
接触面
目标面
15
Lzh_CAE
主讲:练章华 教授
4.定义刚性目标面
单元类型
二维刚性目标面用TARGE169单元 三维刚性目标面用TARGE170单元
在三维情况下,任意形状的目 标面应该使用三角面来建模。
实常数
对TARGE169和TARGE170 仅需设置实常数R1和R2
②划分刚性目标单元 2D目标单元 GUI:Main Menu>Preprocessor一Meshing一Mesh>Lines 3 目 标 单 元
Command:AMFSH GUI:Main Menu>Preprocessor>Meshing mesh>Ares一Target Sarf Command,LMESH
4
主讲:练章华 教授
位移等值线图
等效应力等值线图
Lzh_CAE
5
主讲:练章华 教授
实例2: 圆柱壳非线性屈曲分析实例(ANSYS)
问题描述:一个对边简支的圆柱壳,在其中心作用一个垂直的集中载荷。我们的 目的是分析当载荷大小为1000N 时,A、B 两点的垂直位移(UY)。 问题详细说明: 材料特性: EX=3.10275 KN /mm2 (杨氏模量)NUXY = 0.3 (泊松比) 几何特性: R = 2540m L = 254m 铰约束 H = 6.35m =0.1 rad 载荷: 2L p = 1000N
(6, 1.5)
(0, 0)
5 12
Lzh_CAE
3
主讲:练章华 教授
/solu nsel , s , loc , x , 0 dsym , symm , x nsel , s , loc , y , 0 dsym , symm , y nsel , all d , all , uz nsel , y , 1.5 d , all , ux nsel , all /solution nlgeom , on pred , on d , 14 , uy , -0.3 time , 0.3
ANSYS主要的接触问题
• Step 7.求解 • solve • Step 8.后处理 • 接触分析的结果主要包括位移、应力、应变和接触信息。 • 接触信息包括:接触压力、单元的现在和过去状态: • 分开(没有接触) • 接触粘合状态 • 接触滑动状态 • 粘合 = 1;滑动 = 2或 -2;分开 = 3或4 • ·两个表面间的距离,如果是正值,两表面是分开的(STAT = 3或
Component
• Component name = CONTACT
• Component is made of = nodes • 【OK】 • 命令:CM,CONTACT,node
• ·KEYOPT(1):选择自由度 • ·KEYOPT(2):选择罚函数的方法 • 0-Penalty function罚函数法 • 1-Penalty function + Lagrange multiplier
(罚函数+拉格朗日法)
• 缺省情况下单元采用罚函数法保证接触协调性。 也可以选择混合罚函数和拉格朗日法,此方法还要 指定一个穿透容差,单位为长度。
• NSEL,S,NODE, …
! 在接触面上选择一组节点
• CM,CONTACT,NODE “CONTACT”
! 将所有节点定义成组元
• NSEL,S,NODE, … 点
! 在目标单元上选择一组节
• CM,TARGET,NODE, “TARGET”
! 将所选节点定义成组元
• NSEL,ALL
! 选中所有节点
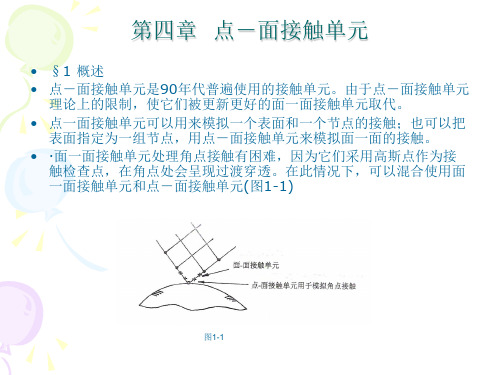
触检查点,在角点处会呈现过渡穿透。在此情况下,可以混合使用面 一面接触单元和点-面接触单元(图1-1)
图1-1
• ·点-面接触单元不必知道接触 面的位置。
接触分析

ANSYS有三种类型的接触单元:点对点:最终位置事先知道;只能用于低次单元点对面:接触区域未知,并且允许大滑动;面对面:接触区域未知,并且允许大滑动(相对点对面接触有几个优点)。
接触分析属于高度非线性分析,需要较多的计算资源,这对网格划分以及接触面的选择提出了较高要求。
ansys可完成的接触分析主要有三类:点点,点面,面面接触分析;接触分析主要分为两类:刚体—柔体接触以及柔体—柔体接触。
其中,金属成型分析是典型的刚体柔体接触,一般的接触的问题均为柔体——柔体接触。
★分析的难点在于:1.接触面的识别和选择;2.摩擦模型的选择。
ansys接触分析是通过建立一层接触单元覆盖在接触面之上点点接触一般较少使用,它适用于:预先知道接触位置,且相对滑动忽略,转动量很小,即使是几何非线性分析。
一些过盈装配问题可以采用点点接触代替面面接触;点面接触不需要知道确切接触位置,也不必保持网格一致,允许较大的变形和相对滑动。
这种接触推荐采用contact48而不是26来计算;面面接触是最为常见也是适用范围较广的接触类型:★几个原则(asymmetric contact):接触单元不能渗入目标面,但是目标(面上的)单元可以渗入接触面。
目标面总是刚性的,接触面总是柔性的。
平面或者凹面为目标面;网格细致的为接触面,网格粗糙的为目标面(目标面可以被渗入);The softer surface should be the contact surface and the stiffer surface should be the target surface.高阶单元为接触面,低阶为目标面;However, for 3-D node-to-surface contact, 低阶单元为接触面,高阶为目标面;面积大的是目标面。
In the case of 3-D internal beam-to-beam contact modeled by CONTA176 (a beam or pipe sliding inside another hollow beam or pipe),内部的为接触面,外部为目标面;However, when the inner beam is much stiffer than the outer beam, the inner beam can be the target surface.若不能很好的区分接触面和目标面(When there are several contact pairs involved in the model, and the graphical picking of contact and target surfaces is difficult, you can just define the symmetric contact pairs and, by setting KEYOPT(8) = 2)可采用对称接触分析(Symmetric Contact),即通过设置KEYPOINT(8)=2 实现。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款常用的有限元分析软件,在使用中常常涉及到点面接触。
点面接触是在分析中经常遇到的一种情况,它是指在不同几何形状的结构或零件之间可能发生的接触现象。
在使用Abaqus进行点面接触分析时,有一些注意事项是需要特别注意的,下面我们来详细介绍一下。
要注意建立合适的模型。
在进行点面接触分析之前,需要对几何模型进行准确建模。
确保模型中所有的几何特征都得到充分考虑,包括接触面的几何形状和尺寸等。
还需要确保模型的边界条件设置正确,以及模型的单元划分合理,单元质量良好。
只有建立了合适的模型,才能保证接触分析结果的准确性。
要注意选择合适的接触类型。
在Abaqus中,有多种不同的接触类型可供选择,如“全局表面到面”接触、“局部表面到面”接触等。
在进行点面接触分析时,需要根据具体的问题情况选择合适的接触类型。
如果选择了错误的接触类型,可能会导致接触分析无法收敛或者结果不准确。
要注意设置合适的接触参数。
在进行点面接触分析时,需要设置一些接触参数,如接触摩擦系数、接触刚度等。
这些参数的设置直接影响到接触分析结果的准确性和收敛性。
需要在进行接触设置时,仔细调整这些参数,确保其合适性。
要注意进行接触区域的生成。
在进行点面接触分析时,需要生成接触区域,即在接触面上生成网格。
接触区域的生成需要满足一定的准则,如网格密度要适中,要保证较小的单元可以精细地描述接触情况。
还需要注意接触面的几何形状,确保接触面的几何特征得到充分考虑。
要注意进行接触后处理。
在完成点面接触分析后,需要进行后处理分析,以获取准确的结果。
在后处理过程中,需要关注接触压力分布、接触面滑移情况等。
通过对这些信息的分析,可以评估接触分析的准确性和有效性。
进行Abaqus点面接触分析时,需要注意建立合适的模型、选择合适的接触类型、设置合适的接触参数、生成合适的接触区域以及进行合适的接触后处理。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款广泛应用的有限元分析软件,用于对结构、零件等进行力学性能分析。
在使用Abaqus进行模拟分析时,点面接触是一个非常常见的接触形式,也是模拟分析中一个非常重要的环节。
点面接触涉及到点和面之间的接触行为,因此在进行模拟分析时需要特别注意一些关键的注意事项,以确保分析结果的准确性和可靠性。
首先,对于点面接触的定义和模拟方法需要有清晰的认识。
点面接触是指两个物体之间的接触行为,其中一个物体的接触部分是一点,而另一个物体的接触部分是一面。
在Abaqus中,点面接触通常通过定义接触对来实现,其中一个面的节点称为接触法线面,另一个面的节点称为接触表面。
通过定义接触对的方式,可以模拟点面接触的力学行为。
其次,在进行点面接触模拟时,需要注意选取适当的接触算法和参数设置。
在Abaqus中,有多种接触算法可供选择,如基于界面法、基于节点法等。
不同的接触算法适用于不同类型的接触问题,因此需要根据具体情况选择合适的接触算法。
此外,还需要设置接触参数,如接触刚度、摩擦系数等,以确保点面接触的力学行为与实际情况相符。
另外,在进行点面接触模拟时,需要考虑到接触状态的变化和接触行为的描述。
点面接触通常涉及到接触状态的切换,如粘附、滑移、分离等。
在Abaqus中,可以通过定义不同的接触行为来描述不同的接触状态,以实现接触状态的切换。
此外,还需要考虑到接触面之间可能存在的不完全接触、过度接触等问题,并通过适当设置参数来解决这些问题,以确保模拟分析的准确性。
最后,在进行点面接触模拟时,需要进行合理的后处理与结果验证。
通过合理的后处理,可以分析并评估模拟结果,了解接触行为的演化过程和影响因素。
此外,还可以通过实验数据与模拟结果进行比较,验证模拟的准确性和可靠性。
通过不断优化和验证,可以提高模拟结果的准确性,为工程实践提供可靠的参考依据。
综上所述,点面接触在Abaqus模拟分析中具有重要的地位,需要特别注意一些关键的注意事项。
abaqus接触分析

abaqus接触分析abaqus—接触分析(转)已有 264 次阅读2010-8-24 19:39 |1、塑性材料和接触面上都不能用C3D20R和C3D20单元,这可能是你收敛问题的主要原因。
如果需要得到应力,可以使用C3D8I (在所关心的部位要让单元角度尽量接近90度),如果只关心应变和位移,可以使用C3D8R, 几何形状复杂时,可以使用C3D10M。
2、接触对中的slave surface应该是材料较软,网格较细的面。
3、接触面之间有微小的距离,定义接触时要设定“Adjust=位置误差限度”,此误差限度要大于接触面之间的距离,否则ABAQUS会认为两个面没有接触:*Contact Pair, interaction="SOIL PILE SIDE CONTACT", small sliding,adjust=0.2.4、定义tie时也应该设定类似的position tolerance: *Tie,name=ShaftBottom, adjust=yes, position tolerance=0.15、 msg文件中出现zero pivot说明ABAQUS无法自动解决过约束问题,例如在桩底部的最外一圈节点上即定义了tie,又定义了contact, 出现过约束。
解决方法是在选择tie或contact的slave surface时,将类型设为node region, 然后选择区域时不要包含这一圈节点(我附上的文件中没有做这样的修改)。
6、接触定义在哪个分析步取决于你模型的实际物理背景,如果从一开始两个面就是相接触的,就定义在initial或你的第一个分析步中;如果是后来才开始接触的,就定义在后面的分析步中。
边界条件也是这样。
7、我在前面上传的文件里用*CONTROL设了允许的迭代次数18,意思是18次迭代不收敛时,才减小时间增量步(ABAQUS默认的值是12)。
一般情况下不必设置此参数,如果在msg文件中看到opening和closure的数目不断减小(即迭代的趋势是收敛的),但12次迭代仍不足以完全达到收敛,就可以用*CONTROL来增大允许的迭代次数。
点接触和面接触强度计算
点接触和面接触强度计算
点接触和面接触是机械设计中常见的两种接触形式。
点接触是指两个曲面在一点或一条线上相互接触,而面接触是指两个曲面在一定面积内相互接触。
一、点接触强度计算
点接触强度计算主要用于评估两个曲面在点接触时的接触应力是否超过材料的许用接触应力,从而判断接触处的承载能力是否满足要求。
1.点接触强度计算的基本公式为:
●σ_H=\sqrt{\frac{2F}{\pi a^2}}
其中:
●σ_H:最大接触应力,单位为MPa
●F:接触力,单位为N
●a:接触半径,单位为mm
2.接触半径a可以根据以下公式计算:
●a=\sqrt{\frac{4F}{\pi K_e}}
其中:
●K_e:综合弹性常数,单位为MPa/mm
3.综合弹性常数K_e可以根据以下公式计算:
●K_e=\frac{1}{\frac{1}{E_1}+\frac{1}{E_2}}
其中:
●E_1:材料1的弹性模量,单位为MPa
●E_2:材料2的弹性模量,单位为MPa
二、面接触强度计算
面接触强度计算主要用于评估两个曲面在面接触时的接触应力分布是否均匀,以及最大接触应力是否超过材料的许用接触应力。
面接触强度计算通常采用有限元分析(FEA)方法进行。
FEA可以模拟出接触处的应力分布,并计算出最大接触应力。
三、在进行面接触强度计算时,需要考虑以下因素:
●接触力的大小和分布
●接触曲面的形状和尺寸
●材料的力学性能。
abaqus点面接触注意事项
abaqus点面接触注意事项全文共四篇示例,供读者参考第一篇示例:Abaqus是一款常用的有限元分析软件,广泛应用于工程界。
在使用Abaqus进行模拟分析时,点面接触是一个常见的情况。
点面接触涉及到两个不同几何体之间的相互作用,因此需要特别注意一些细节和注意事项。
在本文中,我们将针对Abaqus点面接触进行详细介绍和注意事项。
一、定义接触对在Abaqus中,定义接触对是点面接触分析的基本步骤。
接触对是模拟两个几何体之间的点面接触,确定哪些部分会发生接触。
在定义接触对时,需要设置接触对的属性,如摩擦系数、刚度等。
在设置摩擦系数时,需要根据具体情况进行合理的选择,以确保模拟结果的准确性。
二、设置接触参数在定义接触对后,需要设置接触参数,以确定两个几何体之间的接触行为。
在设置接触参数时,需要考虑到两个几何体的材料性质、几何形状等因素,以确保接触分析的准确性。
常用的接触参数包括接触刚度、深度控制等。
在设置接触参数时,需要进行多次实验和调试,以得到最优的模拟结果。
三、搭建模型在设置接触对和参数后,需要搭建模型进行模拟分析。
在搭建模型时,需要考虑到两个几何体之间的点面接触关系,以确保接触行为的准确模拟。
在搭建模型时,需要设置合理的网格划分和边界条件,以确保模拟结果的准确性。
四、模拟分析五、结果分析在模拟分析结束后,需要对结果进行分析。
在结果分析过程中,需要考虑到接触行为的情况,以及两个几何体之间的相互作用。
在结果分析时,需要与实际情况进行比对,以验证模拟结果的准确性。
在使用Abaqus进行点面接触分析时,需要注意一些细节和注意事项,以确保模拟结果的准确性。
希望本文能对大家有所帮助。
第二篇示例:Abaqus是一款广泛应用于工程领域的有限元分析软件,其点面接触功能在模拟接触问题时非常重要。
点面接触是指两个物体之间不完全接触,而是通过一个或多个点来进行接触。
在使用Abaqus进行点面接触分析时,需要注意一些关键因素,以确保模拟结果的准确性和稳定性。
点─面接触分析—点─面

点─面接触分析我们能使用点─面接触单元来模拟一个表面和一个结点的接触,另外,可以通过把表面指定为一组结点,从而用点─面接触来代表面─面的接触。
ANSYS程序的点─面接触单元允许下列非线性行为:·有大变形的面─面接触分析·接触和分开·库仑摩擦滑动·热传递点─面的接触是一种在工程应用中普遍发生的现象,例如:夹子、金属成形等等,工程技术人员对由于结构之间的接触而产生的应力变形为和温度改变是感兴趣的。
使用点─面的接触单元在ANSYS程序中点─面的接触是通过跟踪一个表面(接触面)上的点相对于另一表面(目标面)上的线或面的位置来表示的,程序使用接触单元来跟踪两个面的相对位置,接触单元的形状为三角形,四面体或锥形,其底面由目标面上的节点组成,而顶点为接触面上的节点。
图4─9绘出了二组的接触单元(COWTA(48))和三维的接触单元(COWTA (49))图4─9 (a)2-D接触单元—COWTAC48(b)3-D接触单元─COWTAC49(c)2-D接触单元─COWTAC26如果目标面是刚性的,而问题又是2-D的,则可以使用CONTA26来建模点─面接触分析的步骤下面列出了典型的点─面接触分析的基本步骤1.建模并划分网格2.识别接触对3.生成接触单元4.设置单元关键字和实常数5.给定必须的边界条件6.定义求解选项7.求解8.查看结果第1步:建模,划分网格在这一步中,需要建立代表接触体几何形状的模型,设置单元类型,实常数和材料特性,用适当的单元类型划分网格命令:AMESHVMESHGUI:Main menu>Pneprocossor>Mesh>Mapped>3 or 4 SidedMain menu>Pneprocessor>Mesh>Mapped>4 to 6 sided应该避免使用有中结点的单元,特别是在3维问题中,因为这些单元表面节点上“有效刚度”是很不均匀的,例如,对95号单元来说,角结点上有一个负刚度。
点、线、面接触钢丝绳优缺点
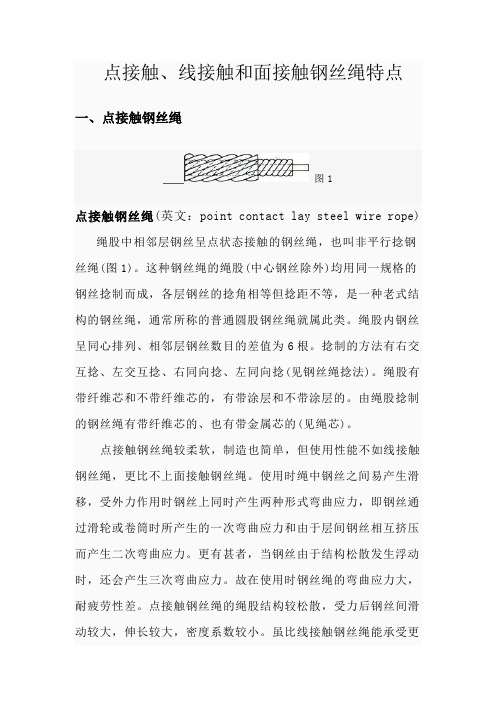
点接触、线接触和面接触钢丝绳特点一、点接触钢丝绳图1点接触钢丝绳(英文:point contact lay steel wire rope) 绳股中相邻层钢丝呈点状态接触的钢丝绳,也叫非平行捻钢丝绳(图1)。
这种钢丝绳的绳股(中心钢丝除外)均用同一规格的钢丝捻制而成,各层钢丝的捻角相等但捻距不等,是一种老式结构的钢丝绳,通常所称的普通圆股钢丝绳就属此类。
绳股内钢丝呈同心排列、相邻层钢丝数目的差值为6根。
捻制的方法有右交互捻、左交互捻、右同向捻、左同向捻(见钢丝绳捻法)。
绳股有带纤维芯和不带纤维芯的,有带涂层和不带涂层的。
由绳股捻制的钢丝绳有带纤维芯的、也有带金属芯的(见绳芯)。
点接触钢丝绳较柔软,制造也简单,但使用性能不如线接触钢丝绳,更比不上面接触钢丝绳。
使用时绳中钢丝之间易产生滑移,受外力作用时钢丝上同时产生两种形式弯曲应力,即钢丝通过滑轮或卷筒时所产生的一次弯曲应力和由于层间钢丝相互挤压而产生二次弯曲应力。
更有甚者,当钢丝由于结构松散发生浮动时,还会产生三次弯曲应力。
故在使用时钢丝绳的弯曲应力大,耐疲劳性差。
点接触钢丝绳的绳股结构较松散,受力后钢丝间滑动较大,伸长较大,密度系数较小。
虽比线接触钢丝绳能承受更大载荷,但寿命较低。
随着技术的不断发展,除了小直径(10mm 以下)和大直径(60mm以上)以及起重吊装和捆扎等需要考虑操作方便的场合之外,已不再使用这类钢丝绳。
二、线接触钢丝绳图1绳股中相邻层钢丝呈线状态接触的钢丝绳,也叫平行捻钢丝绳。
绳股由几种规格的钢丝捻制而成,各层钢丝的捻距相同但捻角不等。
按照股中钢丝配置方式,线接触钢丝绳分为瓦林吞式、西鲁式、填充式和瓦林吞一西鲁式4种,如图所示。
(1)瓦林吞式。
股通常由两层钢丝组成,外层钢丝分粗细两种,根数是内层钢丝的一倍,粗钢丝位于内层钢丝的槽中,细钢丝在两根粗钢丝之间。
瓦林吞式钢丝绳较柔软,但耐磨性不及西鲁式。
结构如图a所示(具有天然纤维绳芯瓦林吞钢丝绳6(6/6+6+1)+NF)。
接触分析全文 文档

参考:接触分析全文一般的接触分类 1ANSYS接触能力 1点─点接触单元 1点─面接触单元 2面─面的接触单元 2执行接触分析 3面─面的接触分析 3接触分析的步骤: 3步骤1:建立模型,并划分网格 4步骤二:识别接触对 4步骤三:定义刚性目标面 4步骤4:定义柔性体的接触面8步骤5:设置实常数和单元关键字10步骤六:21步骤7:给变形体单元加必要的边界条件22步骤8:定义求解和载步选项22第十步:检查结果23点─面接触分析25点─面接触分析的步骤26点-点的接触36接触分析实例(GUI方法)39非线性静态实例分析(命令流方式)42接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS使用的接触单元和使用它们的过程,下面分类详述。
abaqus点面接触注意事项

abaqus点面接触注意事项
在Abaqus中进行点面接触分析时,有一些注意事项需要考虑:
1. 接触定义,在模型中定义点面接触时,需要确保正确地定义
接触对。
这包括指定接触面和接触点,并设置适当的接触属性,如
摩擦系数和弹簧刚度等。
2. 网格质量,在进行点面接触分析前,需要确保模型的网格质
量良好。
特别是接触面和接触点附近的网格应当足够细致,以确保
准确的接触行为模拟。
3. 材料定义,正确定义接触面和接触点所涉及的材料属性至关
重要。
这包括材料的弹性模量、泊松比等参数,对于摩擦接触还需
要定义摩擦系数。
4. 边界条件,在进行点面接触分析时,需要正确定义边界条件,以确保模型的边界行为符合实际情况。
这包括约束条件、加载条件等。
5. 收敛性,在进行点面接触分析时,需要进行收敛性研究,确
保分析结果的准确性。
这包括对网格密度、时间步长等参数进行敏
感性分析,以确保结果的收敛性和稳定性。
总的来说,在进行Abaqus中的点面接触分析时,需要考虑接触
定义、网格质量、材料定义、边界条件和收敛性等多个方面的因素,以确保分析结果的准确性和可靠性。
希望以上信息能够帮助到你。
结构接触分析介绍2

3、使用实常数 PMIN 和 PMAX 来指定初始容许的穿透范围。
当指定 PMAX 或 PMIN 后,在开始分析时,程序会将目标面移到初始接触状态,见图5-14。
如果初始穿透大于 PMAX,程序会调整目标面来减少穿透。
接触状态的初始调节仅仅通过平移来实现。
对给定载荷或给定位移的刚性目标面,将会执行初始接触状态的初始调节。
对没有指定边界条件的目标面,也同样可以进行初始接触的调整。
当目标面上的所有节点,有给定的零位移值时,使用 PMAX 和 PMIN 的初始调节将不会被执行。
图5-14 接触面调整(PMIN,PMAX)注意 --ANSYS程序独立地处理目标面上节点的自由度。
例如:如果用户指定自由度 UX 值为“0”,那么沿着X方向就没有初始调查。
然而,在 Y 和 Z 方向仍然会激活 PMAX 和 PMIN 选项。
初始状态调整是一个迭代过程,程序最多进行20次迭代。
如果目标面不能进入可接受的穿透范围(即PMIN,PMAX 范围),程序将在原始几何实体上操作。
这时程序会给出一个警告信息,用户可能需要调整用户的初始几何模型。
图5-15给出了一个初始接触调整迭代失败的例子。
目标面的 UY 被约束。
因此,初始接触唯一容许的调整是在 X 方向,然而,在这个问题中,刚性目标面在 X 方向的任何运动都不会引起初始接触。
对于柔体-柔体接触,这种方法不仅移动整个目标面,还同时移动与目标面相连的整个柔体。
请确保没有其他接触面或目标面与柔体相连。
图5-15 一个初始调整失败的例子4、设置KEYOPT(9)=1来调整初始穿透或间隙,见图5-16。
真正的初始穿透包括两部分:几何模型产生的穿透或间隙;用户定义的接触面偏移(CNOF)产生的穿透或间隙;KEYOPT(9)提供下列功能:包括由几何和接触面偏移产生的初始穿透,设置 KEYOPT(9)=0。
这是缺省。
忽略上面两者引起的初始穿透,设置KEYOPT(9)=1。
在KEYOPT(12)=4或5时,这一KEYOPT(9)=1,也将忽略间隙弹簧的初始力,这样,建立了一个初始的“理想的”接触面--在接触截面上没有初始力的作用。
ANSYS接触问题

接触问题(参考ANSYS的中文帮助文件)当两个分离的表面互相碰触并共切时,就称它们牌接触状态。
在一般的物理意义中,牌接触状态的表面有下列特点:1、不互相渗透;2、能够互相传递法向压力和切向摩擦力;3、通常不传递法向拉力。
接触分类:刚性体-柔性体、柔性体-柔性体实际接触体相互不穿透,因此,程序必须在这两个面间建立一种关系,防止它们在有限元分析中相互穿过。
――罚函数法。
接触刚度――lagrange乘子法,增加一个附加自由度(接触压力),来满足不穿透条件――将罚函数法和lagrange乘子法结合起来,称之为增广lagrange法。
三种接触单元:节点对节点、节点对面、面对面。
接触单元的实常数和单元选项设置:FKN:法向接触刚度。
这个值应该足够大,使接触穿透量小;同时也应该足够小,使问题没有病态矩阵。
FKN值通常在0.1~10之间,对于体积变形问题,用值1.0(默认),对弯曲问题,用值0.1。
FTOLN:最大穿透容差。
穿透超过此值将尝试新的迭代。
这是一个与接触单元下面的实体单元深度(h)相乘的比例系数,缺省为0.1。
此值太小,会引起收敛困难。
ICONT:初始接触调整带。
它能用于围绕目标面给出一个“调整带”,调整带内任何接触点都被移到目标面上;如果不给出ICONT值,ANSYS根据模型的大小提供一个较小的默认值(<0.03=PINB:指定近区域接触范围(球形区)。
当目标单元进入pinball区时,认为它处于近区域接触,pinball区是围绕接触单元接触检测点的圆(二维)或球(三维)。
可以用实常数PINB调整球形区(此方法用于初始穿透大的问题是必要的)PMIN和PMAX:初始容许穿透容差。
这两个参数指定初始穿透范围,ANSYS 把整个目标面(连同变形体)移到到由PMIN和PMAX指定的穿透范围内,而使其成为闭合接触的初始状态。
初始调整是一个迭代过程,ANSYS最多使用20个迭代步把目标面调整到PMIN和PMAX范围内,如果无法完成,给出警告,可能需要修改几何模型。
非线性-接触分析
接触分析接触问题是一种高度非线性行为,需要较大的计算资源,为了进行实为有效的计算,理解问题的特性和建立合理的模型是很重要的。
接触问题存在两个较大的难点:其一,在你求解问题之前,你不知道接触区域,表面之间是接触或分开是未知的,突然变化的,这随载荷、材料、边界条件和其它因素而定;其二,大多的接触问题需要计算摩擦,有几种摩擦和模型供你挑选,它们都是非线性的,摩擦使问题的收敛性变得困难。
一般的接触分类接触问题分为两种基本类型:刚体─柔体的接触,半柔体─柔体的接触,在刚体─柔体的接触问题中,接触面的一个或多个被当作刚体,(与它接触的变形体相比,有大得多的刚度),一般情况下,一种软材料和一种硬材料接触时,问题可以被假定为刚体─柔体的接触,许多金属成形问题归为此类接触,另一类,柔体─柔体的接触,是一种更普遍的类型,在这种情况下,两个接触体都是变形体(有近似的刚度)。
ANSYS接触能力ANSYS支持三种接触方式:点─点,点─面,平面─面,每种接触方式使用的接触单元适用于某类问题。
为了给接触问题建模,首先必须认识到模型中的哪些部分可能会相互接触,如果相互作用的其中之一是一点,模型的对立应组元是一个结点。
如果相互作用的其中之一是一个面,模型的对应组元是单元,例如梁单元,壳单元或实体单元,有限元模型通过指定的接触单元来识别可能的接触匹对,接触单元是覆盖在分析模型接触面之上的一层单元,至于ANSTS 使用的接触单元和使用它们的过程,下面分类详述。
点─点接触单元点─点接触单元主要用于模拟点─点的接触行为,为了使用点─点的接触单元,你需要预先知道接触位置,这类接触问题只能适用于接触面之间有较小相对滑动的情况(即使在几何非线性情况下)如果两个面上的结点一一对应,相对滑动又以忽略不计,两个面挠度(转动)保持小量,那么可以用点─点的接触单元来求解面─面的接触问题,过盈装配问题是一个用点─点的接触单元来模拟面─与的接触问题的典型例子。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点─面接触分析我们能使用点─面接触单元来模拟一个表面和一个结点的接触,另外,可以通过把表面指定为一组结点,从而用点─面接触来代表面─面的接触。
ANSYS程序的点─面接触单元允许下列非线性行为:·有大变形的面─面接触分析·接触和分开·库仑摩擦滑动·热传递点─面的接触是一种在工程应用中普遍发生的现象,例如:夹子、金属成形等等,工程技术人员对由于结构之间的接触而产生的应力变形为和温度改变是感兴趣的。
使用点─面的接触单元在ANSYS程序中点─面的接触是通过跟踪一个表面(接触面)上的点相对于另一表面(目标面)上的线或面的位置来表示的,程序使用接触单元来跟踪两个面的相对位置,接触单元的形状为三角形,四面体或锥形,其底面由目标面上的节点组成,而顶点为接触面上的节点。
图4─9绘出了二组的接触单元(COWTA(48))和三维的接触单元(COWTA (49))图4─9 (a)2-D接触单元—COWTAC48(b)3-D接触单元─COWTAC49(c)2-D接触单元─COWTAC26如果目标面是刚性的,而问题又是2-D的,则可以使用CONTA26来建模点─面接触分析的步骤下面列出了典型的点─面接触分析的基本步骤1.建模并划分网格2.识别接触对3.生成接触单元4.设置单元关键字和实常数5.给定必须的边界条件6.定义求解选项7.求解8.查看结果第1步:建模,划分网格在这一步中,需要建立代表接触体几何形状的模型,设置单元类型,实常数和材料特性,用适当的单元类型划分网格命令:AMESHVMESHGUI:Main menu>Pneprocossor>Mesh>Mapped>3 or 4 SidedMain menu>Pneprocessor>Mesh>Mapped>4 to 6 sided应该避免使用有中结点的单元,特别是在3维问题中,因为这些单元表面节点上“有效刚度”是很不均匀的,例如,对95号单元来说,角结点上有一个负刚度。
然而,是接触关系建立,ANSYS程序的点─面接触算法假定刚度均匀分布在面上的所有结点上,因此,在接触分析中使用这些单元时,能导致收敛困难。
仅仅在使用COWTA48的2维分析中,才可以在接触面上使用中结点单元,但不能在目标面上使用中结点单元,当生成48号接触单元的时候,目标面上的中节点将被忽略,这样将会导致在目标面上不均匀的力传递。
第2步,识别接触对你必须认识到在变形过程中,哪儿可能发生接触,一是你已知认识到潜在接触面,通过接触单元来定义它们,为了更有效地进行计算(主要指CPU时间),你可能想,定义比较小的,局部的接触区域,但要保证你所定义的接触区域能模拟所有必须的接触。
由于几何形状和潜在变形的多样化,可能有多个目标面和同一个接触面相互作用,在这种情况下,必须定义多个接触对,对每个表面,你需要建立一个包含表面节点的组元。
命令:CMGUI:Utility>Select>Comp/Assembly>Cneate Component然后就可以使用这些表面结点,在接触面之间形成所有有可能的接触形状。
如果你能肯定某些面永远不会相互接触,那么应该适当的包括更多的结点第三步:生成接触单元在生成接触单元之前,首先必须定义单元类型,对点─面的接触使用CONTAC48(2维)和CONTAC49(3维)命令:ETGUI:Main menu>Pneprocessor>Eloment Type>Add/Edit/Relete然后再定义接触单元的实常数,每个不同的接触面应该有一个不同的实常数号,即便实常的值相同,因为使用不同的实常数号,程序能够较好的区分出是壳的顶面还底面接触,或者是能够在不同的接触面进行较好的区分。
例如:在角接触中,每条也应该有它自己的实常数号,如图4─10所示,另一种典型应用是梁的双边接触,如图4─11所示命令:RRMODIFGUI:Main menu>Pneprocessor>Real Constants接着就是在对应的接触对之间生成接触单元。
命令:GCGENGUI:Main menu>Pnprocossor>Cneate>Elements>At Confactsrf对生成点─面的接触单元的几点提示。
·一般来说,生成的接触单元不需超过所需要的2─3,使用“限制半径”(RADC)或“生成的单元数”(NUMC)选项来限制生成的接触单元数,如果生成的接触单元数超过所需的10或更多,则会极大增加计算时间,同时也需要大量的硬盘空间。
·进行接触分析时在接触面上建议使用无中结点的单元。
·对梁或壳单元需要通过“目标面”(TLAB)选项来指定单元数一边是目标面。
·对于卷曲的(非平面)目标面,使用CONTA49的“基本形状”(shape)选项来指定单元的基本形状是三角形,这个选项能使目标单元较好的模拟目标面的原形。
·每次在新的接触对之间生成接触单元时,都指定一个新的实常数号,既使接触单元的实常数值没有改变,生成对称或反对称的接触单元。
你可以选择生成对称的或反对称的接触单元,用一个简单的GCGEN命令定义一对接触面生成一种反对称的接触方式。
在这种情况下,一个面是接触面而另一个是目标面,另外你可以使用两个GCGEN命令,将两个面都定义成即是目标面又是接触面,这种情况叫作对称接触方式,例如:考虑两个面A和B,在第一个GCGEN命令中,将面A指定为接触面,面B指定为目标面,而在第二个GCGEN命令中,将面A指定为目标面,而将面B指定为接触面,下面是在前处理中生成接触单元的标准命令流输入。
NSEL,S,NODE…!在接触面上选择一组结点CM,CONTACT,NODE !将所造结点生成组元“COMTACT”NSEL,S,NODE…!大目标面上选择一组新结点CM,TARGET,NODE !将所选结点生成组元“TARGET”NSEL,ALLGCGEN,CONTACT,TARGETGCGEN,TARGET,CONTACT一般来说,对称接触方式是一种更好的方法,因为它不需要特别考虑哪个面是接触面,哪个面是目标面,相反,反对称接触方式在区分目标面和接触面时需要遵守以下规则:·如果一个面的接触部分是平的或凹的,而另一个面的接触部分是尖的或凸的,则应该将平凹面作为目标面,·如果两个接触面都是平的,则可以任意选择·如果两个接触面都凸的,应该将两个面中较平的作为目标面·如果一个接触部分有尖边,而另一个没有,则有尖边的面应作为接触面。
生成已经开始接触的模型,那就是建立开始变形时的模型,这样,单元实际上已经彼此重叠在一起,用这种方法,在对结构进行分析时只需使用一个载荷步,同时应该打开“线性搜索”选识,从许多过盈分析问题中发现,为了得到收敛的结果,必须打开此选项。
命令:LNSRCH,ONGUI:main menu>Preprocessor>load>No linesr>Line Search用一个较弱的初始法向刚度(实常数KN)来生成已经开始接触的模型进行计算,然后在以后的载步中,使用新的R命令来逐步增加KN的值到一适当的值。
(在此方法中,必须明确定义切向刚度佳,而不能使用缺省值)第四步:设置单元关键字和实常数使用点─面的接触单元时,程序使用四个单元关键字和几个实常数来控制接触行为单元关键字:CONTAC48和CONTAC49使用下面的单元关键字KEYOPT(1):选择正确的自由度(包含或不包括温度)KEYOP(2):选择罚函数的方法或罚函数+拉格朗日方法KEYOPT(3):选择摩擦类型;无摩擦弹性库仑摩擦或刚性库仑摩擦。
KEYOPT(7):选择接触时间步预测控制命令:KEYOPTETGUI:Main Mneu>Pneporcessor>Element Type >Add/Delete摩擦类型你需要选择一种摩擦类型,点─面接触单元支持弹性库仑摩擦和刚性库仑摩擦,弹性库仑摩擦允许存在粘合和滑动状态,粘合区被当作一个刚度为KT的弹性区来处理,在变形期间当接触面是粘合而不是滑动的时候,选择这种摩擦类型是好的,刚性库仑行为仅仅允许有滑动摩,而接触面不能粘合,仅仅在两个面处理持续的相对滑动时,才选择这种摩擦类型,如果运动停止或逆转,将会遇到收敛性的问题。
罚函数与罚函数+拉格朗日方法协调控制方法保证一个面不会渗透进入另一个面超过某一容许量,这可以通过罚函数方法或罚函数+拉格朗日方法来实现,在这种方法中,将有力加在接触结点上,直到接触结点渗透进入目标面。
热─结构结触如果两个温度不同的物体此接触,在它们之间将会发生热传递我们能够联合这种点─面的接触单元和热─结构来合场单元来模拟这种情况下的热传递,(对不关心应力的分析,能够用标准的热单元来给系统的固定部分建模。
)其关键字设置如表1─2所示,这些单元的热─结构都被激活,(必须为实常数COND(接触传导率)定义一个值,以模拟接触界面之间的热量流动)接触预测CONTAC48和CONTAC49对控制接触时间预测提供了三个选项。
·没有预测:当自动时间步被找开并允许小的时间步时,大多的静力分析使用此选项,如果允许一个足够小的时间步自动时间步长二分特征将会把步长减小到必要的大小,然而,二分法并不是一种需要进行时间预测的有效方法,对在加载过程中,有不连续接触区域的那些问题,时间步预测是必须的。
·合理的时间步:为了保持一个合理的时间/载增量,需要在接触预测中选择此项。
此项在时间步长预测器正在完好运行的静态分析中,或在连续接触(滚动接触)的瞬态分析中是有用的,如果接触点的位置随时间的变化是一个非线性函数,那么线性时间步长预测不可能是有效的,虽然其它的非线性特征能够小时间步以使线性时间步长预测能够提供很好的预测效果。
·最小的时间/载荷增量预测,无论什么时候,当接触状态发生的改变时,预测会取一个最小的时间/载荷增量,这个选项在碰撞和断续接触的瞬态分析中是有用的,或者用于由于线性预测不起作用而导致的第二个选项无用时,为了更有效的进行计算,仅仅对处于初始接触状态的那些接触单元使用此选项。
实常数CONTAC48和CONTAC49使用下面的实常数·KN定义法向接刚度。
·KT定义粘合接触刚度·TOLN 定义最大的渗透容差·FACT定义静摩擦与动摩擦的比值·TOLS定义一个小的容差以增加目标面的长度。
·COND定义接触传导率命令:RGUI:Main menu>Preprocessor>Real Constants法向刚度我们必须给接触刚度KN提供一个值,(对KN设有缺省值)KN应该是足够大的以便不会引起过大的渗透,但又不应该大到导致病态条件,对大多的接触分析,应该按下面的公式来估计KN的值。