X-Y数控工作台毕业论文(机电一体化系统综合课程设计).docx
立式数控铣床X-Y工作台
机电一体化课程设计立式数控铣床X-Y数控工作台机电系统设计姓名:***学号: **********班级:10机电<2>班学院:中国计量学院机电工程学院指导老师:张远辉、徐立军目录前言................................................................................................ 错误!未定义书签。
一、设计任务 (2)1.1课程设计时间 (2)1.2课程设计题目 (2)1.3课程设计任务 (2)1.4课程设计内容 (2)1.5课程设计要求 (2)二、总体方案的确定 (3)2.1机械传动部件的选择 (3)2.2控制系统的设计 (4)三、机械传动部件的计算与选型 (4)3.1导轨上移动部件的重量估计 (4)3.2铣削力的计算 (5)3.3导轨副计算和选型 (6)3.4滚珠丝杠螺母副的计算和选型 (7)3.5步进电机减速箱的选用 (9)3.6步进电机的计算与选型 (9)3.7编码器(反馈电路)选型 (13)四、工作台机械装配图的绘制 (14)4.1可参考课本图6-23 XY数控工作台装配图 (14)五、工作台控制系统的设计 (14)5.1电源电路 (14)5.2存储器扩展电路 (15)5.3键盘电路 (17)5.4显示电路 (18)5.5传感器电路 (19)六、步进电机驱动电路设计 (20)6.1驱动电路 (20)6.2光电隔离 (20)七、程序设计 (21)7.1功能 (21)7.2框图 (22)7.3代码 (23)八、总结 (24)参考文献 (24)答辩记录 (25)前言X-Y数控工作台是许多机电一体化设备的基本部件,如数控车床的纵-横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。
因此,选择X-Y数控工作台作为机电综合课程设计的内容,对于机电一体化专业的教学具有普遍意义。
(完整版)XY数控工作台设计说明书.docx
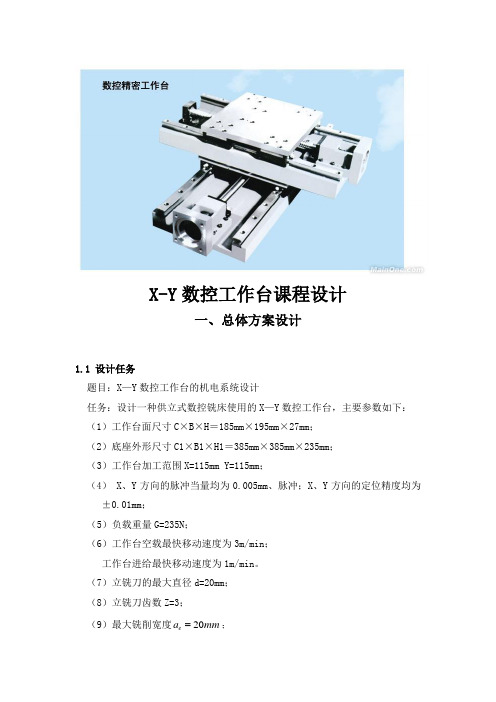
一、总体方案设计1.1设计任务题目: X— Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X—Y 数控工作台,主要参数如下:1)工作台面尺寸C×B× H=【 200+(班级序号)× 5】 mm×【 200+(班级序号)× 5】mm×【 15+(班级序号)】mm;2)底座外形尺寸C1×B1× H1=【 680+(班级序号)× 5】mm×【 680+(班级序号)×5】mm×【 230+(班级序号)× 5】 mm;3)工作台加工范围X=【 300+(班级序号)× 5】mm,Y=【300+(班级序号)× 5】mm;4) X 、Y 方向的脉冲当量均为0.005mm/脉冲; X、 Y 方向的定位精度均为± 0.01mm;5)夹具与工件质量M=【15+(班级序号)】kg;6)工作台空载最快移动速度为3m/min;工作台进给最快移动速度为0.5m/min 。
7)立铣刀的最大直径d=20mm;8)立铣刀齿数Z=3;9)最大铣削宽度a e20mm ;10)最大被吃刀量a p10mm 。
1.2总体方案确定(1)机械传动部件的选择① 导轨副的选择② 丝杠螺母副的选择③ 减速装置的选择④ 伺服电动机的选择(2)控制系统的设计① 伺服电机启动、停止、调速、正反转的控制② PLC 控制电机的梯形图编程XY数控工作台结构Y 方向传动机构微机工作台电型步进电接动机减速器机驱滚珠丝杠口动电人机接口路减步进电速滚器珠动机X 方向传动机构丝杠系统总体方案结构框图1.3设计的基本要求(1)按照机械系统设计的步骤进行相关计算,完成手写设计说明书。
(2)计算结果作为装配图的尺寸和零部件选型的依据,通过 AutoCAD软件绘制 XY数控工作台的总装配图,并绘制 AO图纸。
XY数控工作台机电系统设计[当文网提供]
![XY数控工作台机电系统设计[当文网提供]](https://img.taocdn.com/s3/m/46a4650b376baf1ffc4fad99.png)
学士学位毕业论文(设计)X-Y数控工作台机电系统设计学生姓名学号专业械设计制造及其自动化班级指导教师学部答辩日期X-Y数控工作台机电系统设计摘要X-Y数控工作台机电系统设计是一个开环控制系统,其结构简单。
实现方便而且能够保证一定的精度。
降低成本,是微机控制技术的最简单的应用。
它充分的利用了危机的软件硬件功能以实现对机床的控制。
使机床的加工范围扩大,精度和可靠性进一步得到提高。
X-Y数控工作台机电系统设计是利用8031单片机,及2764,6264存储器及8155芯片等硬件组成,在控制系统的硬件上编写一定的程序以实现一定的加工功能。
其基本思想是:通过圆弧或者直线插补程序以实现对零件进行几何加工,每进行一段加工都要产生一定的脉冲以驱动电机正反转,同时通过8155(1)将相应的加工进刀信息送至刀架库中以实现以之相应的走刀,电机和刀具的相对运动所以实现了刀具对工件的加工。
该控制系统采用软件中断控制系统结构及子程序结构简单,条件明确在经济型数控中应用较多。
中断结构采用模块化结构设计因为这种结构便于修改和扩充,编制较为方便,便于向多处理方向发展。
X-Y数控工作台机电系统设计采用步进电机作为驱动装置。
步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。
其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。
由于旋转磁场对放入其中的通电导体既转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。
本题目是步进电机,微型计算机,插补原理,汇编语言的综合应用,本题目设计得到了老师的帮助和支持,最后由董玉红老师审定,在此表示感谢。
本题目由方世龙完成,共分六章,第一章主要设计总体方案设计第二章主要设计了机械系统设计;第三章主要设计了控制系统硬件设计;第四章主要设计控制系统软件设计;第五章主要是本设计的附录。
机电一体化专科毕业论文【范本模板】
机电一体化专业毕业论文题目机电一体化综合课程设计专业机电一体化指导教师作者完成日期目录一、前言 (4)二、总体方案设计 (6)(一)总体分析 (6)(二)方案框图 (6)三、单元模块设计 (7)(一)键盘与显示模块 (7)1 模块工作原理 (7)2 芯片CH452介绍 (8)3 特点 (9)4 显示驱动原理 (11)5 键盘扫描原理 (13)(二)单片机控制单元模块电路 (15)1 控制原理 (15)2 光电耦合电路 (16)3 芯片介绍 (17)(三)串行通信模块 (21)1 RS232通信协议 (21)2 串行通信电路 (23)四、电机与电气控制电路设计 (24)(一)步进电机模块 (24)1 步进电机的工作原理 (24)2 步进电机的步距角与工作拍数 (27)3 步进电机的频率特性 (28)(二)交流电机正反转控制原理 (30)(三) 交流电机的星—三角形启动 (32)(四)电气元件介绍 (32)五、设计总结、致谢 (35)六、参考文献 (37)附录Ⅰ:单片机控制系统电路原理图设计 (38)附录Ⅱ:电气控制原理图1 (39)附录Ⅲ:电气控制原理图2 (40)机电一体化综合课程设计摘要:本设计是完成一两坐标步进电机驱动运动工作台控制系统的设计;完成交流电机启停的电气控制系统设计。
其硬件部分共包括键盘操作、单片机控制、输入电路、控制电路、显示电路等五个主要组成部分。
设计的总体思路是准确安全的对工作台和电机进行控制.位置信号和按键信息通过传输线传送给单片机和键盘接口芯片,数据经过处理,将按键信息串行方式传送给单片机,单片机通过相应的程序,向控制回路发送控制信号,进而控制工作台的动作,实现对硬件设备的控制。
关键词:键盘操作,单片机控制,数码管显示。
一、前言机电一体化是以机械技术和电子技术为主题,多门技术学科相互渗透、相互结合的产物,是正在发展和逐渐完善的一门新兴的边缘学科。
机电一体化使机械工业的技术结构、产品结构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化"迈入了以“机电一体化”为特征的发展阶段.本设计中提到的微机数控机床是利用单板或单片微机对机床运动轨迹进行数控及对机床辅助功能动作进行程序控制的一种自动化机械加工设备。
机电一体化系统综合课程设计-X-Y数控工作台设计说明书

HEFEI UNIVERSITY OF TECHNOLOGY《机电一体化系统设计》课程课外学分项目名称 X—Y数控工作台项目组成员王扬2013210475朱诚诚2013210484李青岩2013210493黄志鹏2013210502 成绩机械工程学院机械电子工程系二零一六年十一月目录1总体方案设计 01。
1设计任务 01.2总体方案确定 01。
2.1系统的运动方式与伺服系统 01.2。
2计算机系统 01.2。
3X—Y工作台的传动方式 02机械系统设计 (1)2。
1工作台外形尺寸及重量估算 (1)2.2滚动导轨的参数确定 (1)2.2.1导轨型式 (1)2.2。
2导轨长度 (1)2.2.3直线滚动轴承的选型 (1)2.2.4滚动导轨刚度及预紧方法 (2)2。
3滚珠丝杠的设计计算 (2)2.3.1最大动负载Q的计算 (2)2.3。
2滚珠丝杠螺母副几何参数计算 (3)2。
3。
3传动效率计算 (3)2.3.4刚度验算 (3)2.4步进电机的选用 (4)2。
4。
1步进电机的步距角 (4)2。
4.2步进电机启动力矩的计算 (4)2.4.3步进电机的最高工作频率 (5)2.5确定齿轮传动比 (5)2.6确定齿轮模数及有关尺寸 (5)2。
7步进电机惯性负载的计算 (6)3控制系统硬件设计 (8)3。
1CPU板 (8)3.1。
1CPU的选择 (8)3。
1。
2CPU接口设计 (8)3。
2驱动系统 (9)3。
2.1步进电机驱动电路和工作原理 (9)3。
2.2电磁铁驱动电路 (10)3。
2。
3电源设计 (11)4控制系统软件设计 (12)4.1总体方案 (12)4。
2主流程图 (12)4.3X轴电机点动正转程序流程图 (13)4。
4步进电机步进一步程序流程图 (14)参考文献 (15)1总体方案设计1。
1设计任务设计一个数控X—Y工作台及其控制系统.该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0。
数控铣床X-Y工作台的设计论文
图书分类号:密级:毕业设计(论文)数控铣床X-Y工作台的设计THE DESIGN OF X-Y TABLE IN MILLING学生姓名学院名称专业名称指导教师20**年05月19日徐州工程学院学位论文原创性声明研究工作所取得的成果。
除文中已经注明引用或参考的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品或成果。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标注。
本人完全意识到本声明的法律结果由本人承担。
论文作者签名:日期:年月日徐州工程学院学位论文版权协议书本人完全了解徐州工程学院关于收集、保存、使用学位论文的规定,即:本校学生在学习期间所完成的学位论文的知识产权归徐州工程学院所拥有。
徐州工程学院有权保留并向国家有关部门或机构送交学位论文的纸本复印件和电子文档拷贝,允许论文被查阅和借阅。
徐州工程学院可以公布学位论文的全部或部分内容,可以将本学位论文的全部或部分内容提交至各类数据库进行发布和检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
论文作者签名:导师签名:日期:年月日日期:年月日摘要X-Y数控工作台是是指能分别沿着X 向和Y向移动的工作台,是许多机电一体化设备的基本部件,如数控车床的纵—横向进刀机构、数控铣床和数控钻床的X-Y工作台、激光加工设备的工作台、电子元件表面贴装设备等。
模块化的X-Y数控工作台,通常由导轨座、移动滑块、工作、滚珠丝杠螺母副,以及伺服电动机等部件构成。
其中伺服电动机做执行元件用来驱动滚珠丝杠,滚珠丝杠螺母带动滑块和工作平台在导轨上运动,完成工作台在X、Y方向的直线移动。
导轨副、滚珠丝杠螺母副和伺服电动机等均以标准化,由专门厂家生产,设计时只需根据工作载荷选取即可。
控制系统根据需要,可以选取用标准的工作控制计算机,也可以设计专用的微机控制系统。
关键词X-Y数控工作台;伺服电动机;数控车床AbstractCNC XY table are mean to each along X and Y to move to the table, electromechanical integration equipment, many basic components, such as vertical CNC lathe - lateral feed body,CNC milling and CNC drilling machine XY work Taiwan, laser processing equipment, workstations, electronic components surface mount equipment. Modular CNC XY table, usually by rail seat, move the slider, work, ball screw pair, and the servo motor and other component parts. One servo motor to drive the ball screw actuator to do, the ball screw drive and work platform slide rail movement, complete table in the X, Y direction of the straight line movement. Guideways, ball screw pair and servo motors etc., shall be standardized by the specialized manufacturers, design can be selected only according to work load. Control system as needed, you can select a computer using a standard job control, you can design a dedicated computer control system.Keywords XY table servo system CNC machine tools目录1绪论 (1)1.1课题的选择背景 (1)1.2设计目的及意义 (1)1.3总体方案的设计 (2)2交流伺服电动机的选型 (4)2.1交流伺服电动机的选型 (3)2.1.1电机的选择依据 (4)2.1.2电机的负载力矩和惯量的计算 (5)2.2交流伺服电动机概述 (6)2.2.1选择伺服电动机 (7)3丝杠的选型 (8)3.1丝杠的介绍 (8)3.1.1丝杠螺母机构基本传动形式 (8)3.1.2滚珠丝杠副的组成及特点 (8)3.1.3滚珠丝杠副的典型结构形式 (9)3.1.4滚珠丝杠副轴向间隙的调整和预紧 (10)3.1.5滚珠丝杠副的密封与润滑 (10)3.2丝杠螺母副的选择 (11)3.3丝杠的校核 (12)3.4滚珠丝杠支承的选择 (13)3.4.1支承方式的选择 (13)3.4.2轴承的选择 (14)3.5设计滚珠丝杠应注意的问题 (16)4联轴器的选型 (18)4.1联轴器的介绍 (18)4.2选择联轴器的类型 (18)4.2.1初选联轴器的类型 (18)4.2.2初选联轴器 (19)4.3联轴器的校核 (21)4.3.1转矩的校核 (21)4.3.2销的抗剪强度的校核 (21)5导轨的选型及计算 (22)5.1 导轨的组成种类及其应满足的要求 (22)5.2导轨材料的选择及热处理 (22)5.2.1导轨材料的选择 (22)5.2.3导轨的热处理 (23)5.3导轨的选型及长度估算 (23)5.4导轨副的额定寿命计算 (24)5.5滚动导轨副的技术要求 (26)5.6导轨防护罩的设计 (26)5.6.1导轨防护罩的介绍 (26)6.6.2导轨防护罩的选择 (26)5.7导轨的注意事项 (27)6机座的设计 (28)6.1机座的作用及基本要求 (28)6.2机座的设计 (28)6.2.1机座自身刚度 (28)6.2.2提高机座连接处的接触刚度 (29)6.3机座材料的选择 (29)结论 (30)致谢 (31)参考文献 (32)附录 ..................................................................................... 错误!未定义书签。
X_Y数控工作台毕业论文 (机电一体化系统综合课程设计)
一、总体方案设计1.1 设计任务设计一个数控X-Y工作台及其控制系统。
该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0.025mm。
设计参数如下:负载重量G=150N;台面尺寸C×B×H=145mm×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大长度L=388mm;工作台加工范围X=55mm,Y=50mm;工作台最大快移速度为1m/min。
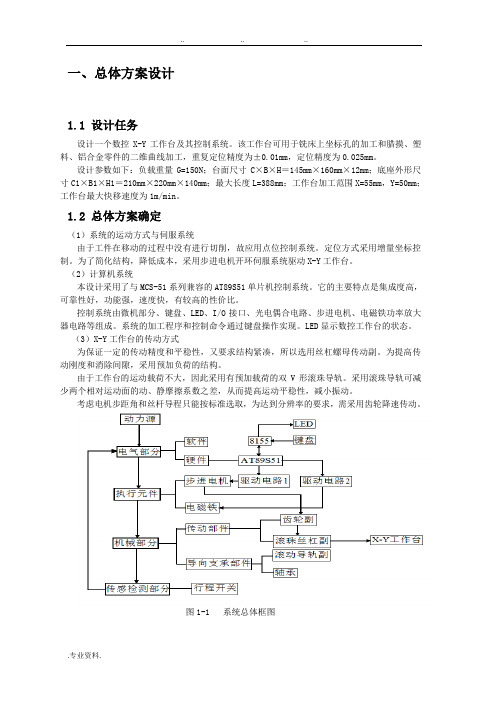
1.2 总体方案确定(1)系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y工作台。
(2)计算机系统本设计采用了与MCS-51系列兼容的AT89S51单片机控制系统。
它的主要特点是集成度高,可靠性好,功能强,速度快,有较高的性价比。
控制系统由微机部分、键盘、LED、I/O接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的加工程序和控制命令通过键盘操作实现。
LED显示数控工作台的状态。
(3)X-Y工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传动刚度和消除间隙,采用预加负荷的结构。
由于工作台的运动载荷不大,因此采用有预加载荷的双V形滚珠导轨。
采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。
考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。
图1-1 系统总体框图二、机械系统设计2.1、工作台外形尺寸及重量估算X 向拖板(上拖板)尺寸:长⨯宽⨯高 145×160×50 重量:按重量=体积×材料比重估算3214516050107.81090--⨯⨯⨯⨯⨯≈NY 向拖板(下拖板)尺寸: 14516050⨯⨯ 重量:约90N 。
xy数控工作台课程设计
X-Y 数控工作台课程设计一、总体方案设计1.1 设计任务题目:X —Y 数控工作台的机电系统设计任务:设计一种供立式数控铣床使用的X —Y 数控工作台,主要参数如下: (1)工作台面尺寸C ×B ×H =185mm ×195mm ×27mm ; (2)底座外形尺寸C1×B1×H1=385mm ×385mm ×235mm ; (3)工作台加工范围X=115mm Y=115mm ;(4) X 、Y 方向的脉冲当量均为0.005mm 、脉冲;X 、Y 方向的定位精度均为±0.01mm ;(5)负载重量G=235N ;(6)工作台空载最快移动速度为3m/min ; 工作台进给最快移动速度为1m/min 。
(7)立铣刀的最大直径d=20mm ; (8)立铣刀齿数Z=3;(9)最大铣削宽度20e a mm ;(10)最大被吃刀量10p a mm 。
1.2总体方案的确定图1-1 系统总体框图(1)机械传动部件的选择 ① 导轨副的选择要设计的X-Y 工作台是用来配套轻型的立式数控铣床,需要承载的载荷不大,但脉冲当量小,定位精度高,因此,决定选用直线滚动导轨副,它具有摩擦系数小、不易爬行、传动效率高、结构紧凑、安装预紧方便等优点。
② 丝杠螺母副的选择伺服电动机的旋转运动需要通过丝杠螺母副转换成直线运动,要满足0.005mm 的脉冲当量和±0.01mm 的定位精度,滑动丝杠副无能为力,只有选用滚珠丝杠副才能达到。
滚珠丝杠副的传动精度高、动态响应快、运转平稳、寿命长、效率高、预紧后可消除反向间隙,而且滚珠丝杠已经系列化,选用非常方便,有利于提高开发效率。
③ 减速装置的选择选择了步进电动机和滚珠丝杠副以后,为了圆整脉冲当量,放大电动机的输出转矩,降低运动部件折算到电动机转轴上的转动惯量,可能需要减速装置,且应有消除间隙机构。
数控铣床XY工作台与控制系统设计-毕业设计

数控铣床XY工作台与控制系统设计-毕业设计————————————————————————————————作者:————————————————————————————————日期:数控铣床XY工作台与控制系统设计123摘要随着现代信息技术的发展,以提高产品加工的生产效率为主的高度自动化和提高产品质量为主的精密化成为现代机械加工技术发展的两个主要方向.人们对数控机床、精密仪器和仪表以及各种精密机械设备提出了越来的精度要求,X-Y工作台是这些设备实现高精密加工的重要部件,对于提高产品的加工起着尤为重要的作用。
本论文针对铣床工作台机构及其控制系统进行设计,主要包括伺服电动机的选型,滚珠丝杠的选型、强度校核及生产设计中应注意的问题,连接伺服电机和滚珠丝杠副的联轴器的选型,导轨的设计。
根据系统的功能要求,选择数控系统的CPU,同时还需要扩展程序存储器、数据存储器以及步进电机驱动电源的选择。
通过对工作台机械传动链的系统设计以期满足机床进给系统的定位精度和静动态性能,从而确保机床的加工精度.关键字:X-Y工作台 ,伺服系统,滚珠丝杠,步进电机The design of CNC milling machine system XYworkbench and control systemAbstractWith the development of modern information techniques, the high automation with the main purpose of improving the production efficiency of product process and the accuracy with the accuracy with the main aim of improving the quality of product have been becoming the two major directions of the modern technique of mechanical process。
数控铣床X-Y工作台的改造毕业设计 机电一体化毕业论文

摘要当今世界电子技术迅速发展,微处理器、微型计算机在各技术领域得到了广泛应用,对各领域技术的发展起到了极大的推动作用。
一个较完善的机电一体化系统,应包含以下几个基本要素:机械本体、动力与驱动部分、执行机构、传感测试部分、控制及信息处理部分。
机电一体化是系统技术、计算机与信息处理技术、自动控制技术、检测传感技术、伺服传动技术和机械技术等多学科技术领域综合交叉的技术密集型系统工程。
新一代的CNC系统这类典型机电一体化产品正朝着高性能、智能化、系统化以及轻量、微型化方向发展。
关键字:机电一体化的基础基本组成要素特点发展趋势AbstractNow the world electronic technology rapidly expand, the microprocessor, the microcomputer obtain the widespread application in various area of technology, to various domains technology development enormous promotion effect. A perfect integration of machinery system, should contain the following several base elements: Basic machine, power and actuation part, implementing agency, sensing measurement component, control and information processing part. The integration of machinery is the system technology, the computer and the information processing and management technology, the automatic control technology, the examination sensing technology, the servo drive technology and the mechanical skill and so on multi-disciplinary area of technology synthesis overlapping technology-intensive systems engineering. New generation's CNC system this kind of model integration of machinery product toward the high performance, the intellectualization, the systematization as well as the featherweight, the microminiaturized direction develops.key words: Integration of machinery foundation basic component elements characteristic trend of development.目录摘要...............................................................1 第一章前言.........................................................3 第二章总体方案的设计...............................................72.1设计任务................................................72.2总体方案的确定..........................................7第三章机械系统的设计........................................93.1工作台外形的设计........................................9 3.2滚珠钢轨的设计.........................................9 3.3 滚珠丝杆的设计.........................................10 3.4 步进电动机的选用.......................................13 3.5 确定齿轮传动比.........................................15 3.6 齿轮模设计.............................................15 3.7 步进电机负载计算.......................................16 第四章控制系统硬件设计.....................................184.1CPU板的设计...........................................18 4.2驱动系统设计...........................................22 4.3 传感器和人机界面设计...................................28 4.4 本章小结...............................................29 第五章控制系统的软件设计....................................305.1总体方案的设计.........................................305.2 主流程图设计...........................................30 5.3 INTO中断服务流程设计.................................31 5.4 INT1中断服务流程设计................................32 致谢......................................................39参考文献...................................................40附录......................................................41第一章前言1.1 当今世界数控技术及装备发展的趋势及我国数控装备技术发展和产业化的现状在我国对外开放进一步深化的新环境下 ,发展我国数控技术及装备、提高我国制造业信息化水平和国际竞争能力的重要性 ,并从战略和策略两个层面提出了发展我国数控技术及装备的几点看法。
完整word版设计一个数控X Y工作台及其控制系统
1.1设计任务设计一个数控 X-Y 工作台及其控制系统。
该工作台可用于铳床上坐标孔的加工和腊摸、塑 料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm ,定位精度为0.025mm 。
设计参数如下:负载重量 G=150N ;台面尺寸C X B X H = 145mm X 160mm X 12mm ;底座外 形尺寸 C1 X B1X H1 = 210mm X 220mm X 140mm ;最大长度 L=388mm ;工作台加工范围 X=55mm , Y=50mm ;工作台最大快移速度为1m/min 。
1.2总体方案确定(1) 系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控 制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y 工作台。
(2) 计算机系统本设计采用了与MCS-51系列兼容的AT89S51单片机控制系统。
它的主要特点是集成度高, 可靠性好,功能强,速度快,有较高的性价比。
控制系统由微机部分、键盘、LED 、I/O 接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的加工程序和控制命令通过键盘操作实现。
LED 显示数控工作台的状态。
(3)X-Y 工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传 动刚度和消除间隙,采用预加负荷的结构。
由于工作台的运动载荷不大,因此采用有预加载荷的双V 形滚珠导轨。
采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。
考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。
I 动力澹I|S1]即 - 1键盘I图1-1系统总体框图、总体方案设计lAT$9S51t—I 步节电机*1駆动电路I 驱』电晤2T 传动部件+I 机械部分}-I 齿竽副I滚珠丝杠副 滚动导轨副|f 专感检测部冏行程开关IT 导向支承部^二、机械系统设计2.1、工作台外形尺寸及重量估算X 向拖板(上拖板)尺寸:长 X 宽 X 高145 X 160 X 50重量:按重量=体积X 材料比重估算32145 咒 160x50 X 10 咒 7.8x10 止 90 NY 向拖板(下拖板)尺寸: 重量:约90N 。
X-Y数控工作台的机电系统设计 机电一体化专业毕业设计 毕业论文

山东科技大学毕业设计(论文)X-Y数控工作台的机电系统设计学生:专业:机电一体化技术班级:机电一体化指导教师:山东科技大学电气信息系二O一二年六月山东科技大学毕业设计(论文)任务书设计(论文)题目:X-Y数控工作台的机电系统设计学院:电气信息系专业:机电一体化班级学号:学生:接受任务时间 2012年月3日教研室主任(签名)院长(签名)1.毕业设计(论文)的主要内容及基本要求1、立铣刀最大直径的d=15mm,立铣刀齿数Z=3,最大铣削宽度a=15mmc最大背吃刀量p a=8mm,加工材料为碳素钢或有色金属。
2、XY方向的脉冲当量为0.005mm/脉冲。
3、X、Y方向的定位精度均为±0.01mm。
4、工作台面尺寸为230mmx230mm,加工范围为250mmx250mm。
5、工作台空载进给最快移动速度:mm/minVxmax==,3000Vymax工作台进给最快移动速度:mm/minVxmaxf==。
Vymaxf4002.指定查阅的主要参考文献及说明张建民.机电一体化系统设计[M].北京:高等教育出版社.2001张训文.机电一体化系统设计与应用[M].北京:北京理工大学出版社.2006张立勋等.机电一体化系统设计[M].哈尔滨:哈尔滨工程大学出版社.文怀兴、夏田.机电一体化系统设计[M].北京:化学工业出版社.2008目录一、设计目的 (5)二、设计任务 (5)三、设计主要步骤 (6)1、机械传动部件的选择 (6)(1)、导轨副的选用 (6)(2)、丝杠螺母副的选用 (6)(3)减速装置的选用 (6)(4)伺服电动机的选用 (6)(5)检测装置的选用 (7)2、控制系统的设计 (7)3、机械传动部件的计算与选型 (8)(1)、导轨上移动部件的重量估算 (8)(2)、切削力的计算 (8)(3)、滚珠丝杠传动的设计计算及选型 (9)(4)滚珠丝杠螺母副的计算与选型 (10)(5)、步进电动机减速箱的选用 (13)(6)步进电动机的计算与选型 (14)(7)增量式旋转编码器的选用 (20)四、工作台机械装配图的绘制 (21)五、总结体会 (21)六、参考文献 (22)一、设计目的《数控机床》课程设计是一个重要的实践性教学环节,要求学生综合的运用所学的理论知识,独立进行的设计训练,主要目的:1、通过设计,使学生全面地、系统地了解和掌握数控机床的基本组成及其思想知识,学习总体的方案拟定、分析与比较的方法。
数控铣床XY工作台 毕业设计.doc

毕业设计茂名职业技术学院2011年12月21日数控铣床X-Y工作台设计【摘要】本设计是在数控机床工作原理之上设计一台简单的、经济型的x-y 数控铣床工作台。
X-Y数控工作台的机电系统设计是一个开环控制系统,其结构简单,实现方便而且能够保证一定的精度。
降低成本,是微机控制技术的最简单的应用。
它充分的利用了微机的软件与硬件功能以实现对机床的控制,使机床的加工范围扩大,精度和可靠性进一步得到提高。
设计任务是完全围绕数控机床工作原理而展开的,本设计充分体现了数控机床机械设备部分与电气设备部分的紧密结合。
X-Y数控工作台设计包括总体方案的设计、步进电机的选用、传动装置的设计、电气控制部分的设计和相关软件的设计。
本设计的经济型数控工作台精度并不高,采用开环系统;机械传动部分采用步进电机直接连接滚珠丝杠,从而驱动工作台进给。
步进电机是一个将脉冲信号转移成角位移的机电式数模转换器装置。
其工作原理是:每给一个脉冲便在定子电路中产生一定的空间旋转磁场;由于步进电机通的是三相交流电,所以输入的脉冲数目及时间间隔不同,转子的旋转快慢及旋转时间的长短也是不同的。
由于旋转磁场对放入其中的通电导体即转子切割磁力线时具有力的作用,从实现了旋转磁场的转动迫使转子作相应的转动,所以转子才可以实现转子带动丝杠作相应的运动。
关键词:X-Y数控工作台;设计任务;机械传动部件;控制系统CNC XY table designAbstractThe design is in the NC machine tool works on top of design a simple, economical CNC xy table. XY table CNC electromech anical system design is an open-loop control system, its structure is simple, convenient and can guarantee to achieve a certain degree of accuracy. Reduce costs, is a computer-controlled technology, the simplest applications. It is full advantage of the crisis in software and hardware capabilities in order to achieve the control of machine tools; to expand the scope of processing machines, precision and reliability, and further enhanced. Design task is completely around theNC machine tool works and carried out,this design fully reflects the CNC machine tools and electrical equipment, machinery and equipment part of the close combination of parts. CNC XY table design includes the overall program design, selection of stepper motors, gear design, electrical control part of the design and related software design. The design of the economy is not high-precision CNC table, using open-loop system; mechanical transmission part is directly connected to ball screw stepping motor, which drives table feed. Stepper motor is a pulse signal will be transferred into the angular displacement of the electromechanical DAC device. Its working principle is: each to a pulse will be generated in the stator circuit in a certain space rotating magnetic field; due to pass the three-phase stepper motors AC Therefore, the number of input pulses and the time interval is different from the rotation of the rotor rotation speed and the length of time are different. As the rotating magnetic field into which the power of both the rotor conductor cutting magnetic field lines when the role of a force, from the realization of the rotating magnetic field corresponding rotational force of rotor rotation, so the rotor can be achieved only lead screw rotorcorresponding movement.Keywords : X-Y CNC table; design tasks; mechanical transmission components; control system目 录摘要 (1)Abstract (2)1.绪论 (5)1.1课题研究发展现状 (5)1.2引言 (6)2.设计任务 (6)题目:X-Y 数控工作台系统设计 (6)3.总体方案的确定 (7)3.1 机械传动部件的选择 .............................................................................................. .73.1.1伺服电动机的选用 (7)3.1.2导轨副的选用 (7)3.1.3丝杠螺母副的选用 (7)3.1.4减速装置的选用 (7)3.1.5检测装置的选用 (7)3.2 控制系统的设计 (8)3.3 绘制总体方案图 (8)4.机械传动部件的计算与选型 (8)4.1 导轨上移动部件的重量估算 (8)4.2 铣削力的计算 (8)4.3 直线滚动导轨副的计算与选型(纵向) (9)4.3.1 块承受工作载荷m ax F 的计算及导轨型号的选取 (9)4.3.2 距离额定寿命L 的计算 (9)4.4 滚珠丝杠螺母副的计算与选型 (10)4.4.1 最大工作载荷Fm 的计算 (10)4.4.2 最大动工作载荷FQ 的计算 (10)4.4.3 初选型号 (10)4.4.4 传动效率η的计算 (10)4.4.5 刚度的验算 (10)4.4.6 压杆稳定性校核 (11)4.5 步进电动机减速箱的选用 (11)4.6 步进电动机的计算与选型 (12)4.6.1 计算加在步进电动机转轴上的总转动惯量J eq (12)4.6.2 计算加在步进电动机转轴上的等效负载转矩Teq (12)4.6.3 步进电动机最大静转矩的选定 (14)4.6.4 步进电动机的性能校核 (14)4.7增量式旋转编码器的选用 (16)5. 绘制进给传动系统示意图 (16)谢辞 (19)参考文献 (20)绪论1.1课题研究发展现状随着科学技术的发展以及世界先进制造技术的兴起和不断成熟,对数控加工技术提出了更高的要求;超高速切削、超精密加工技术的应用,对数控机床的数控系统、伺服性能、主轴驱动、机床结构等提出了更高的性能指标;FMS的迅速发展和CIMS的不断成熟,又将对数控机床的可靠性、通信功能、人工智能和自适应控制等技术提出更高的要求。
X-Y数控工作台的机电系统设计
* * 理工大学课程设计X-Y数控工作台的机电系统设计学院:机械工程学院专业:机械设计制造及其自动化班级:机电 *** 班教师: * * *学号: ***********学生: * * *本文主要是进行X-Y数控工作台的机电系统设计,根据设计任务给定的工作尺寸,设计一种供应式数控铣床的X-Y数控工作台。
首先,确定总体设计方案:其中主要对导轨副、丝杠螺母副、减速装置、检测装置的选用及控制系统的设计进行初步分析,再绘制总体方案图。
其次,进行机械传动部件的计算与选择:主要进行导轨上移动部件的重量估算,铣削力的计算,直线滚动导轨副的计算与选型,滚珠丝杠螺母副的计算与选型,步进电机减速箱的选用,步进电动机的计算与选型。
本部分作为此设计重点,进行了大量的分析、计算及验算,最后得到了满足任务规定尺寸的工作要求。
再次,选用检测装置。
本设计中选用了增量式旋转编码器,确定电路为观电隔离电路,以此来对工作台的运动状态进行检测,从而在反馈后对工作台进行实时调整。
最后,控制系统的设计。
此处主要通过进给传动系统来对硬件电路进行设计,并绘制控制系统原理框图;然后分析选用了步进电动机的驱动电源。
关键字:X-Y数控工作台机电系统导轨滚珠丝杠螺母副控制系统1.引言 (3)2.设计任务 (3)3.总体方案的确定 (3)3.1 机械传动部件的选择 (3)3.1.1导轨副的选用 (3)3.1.2丝杠螺母副的选用 (4)3.1.3减速装置的选用 (4)3.1.4伺服电动机的选用 (4)3.1.5检测装置的选用 (4)3.2 控制系统的设计 (4)3.3 绘制总体方案图 (4)4.机械传动部件的计算与选型 (5)4.1 导轨上移动部件的重量估算 (5)4.2 铣削力的计算 (5)4.3 直线滚动导轨副的计算与选型(纵向) (6)4.3.1 块承受工作载荷的计算及导轨型号的选取 (6)4.3.2 距离额定寿命L的计算 (6)4.4 滚珠丝杠螺母副的计算与选型 (7)4.4.1 最大工作载荷Fm的计算 (7)4.4.2 最大动工作载荷FQ的计算 (7)4.4.3 初选型号 (7)4.4.4 传动效率η的计算 (7)4.4.5 刚度的验算 (7)4.4.6 压杆稳定性校核 (8)4.5 步进电动机减速箱的选用 (8)4.6 步进电动机的计算与选型 (8)4.6.1 计算加在步进电动机转轴上的总转动惯量Jeq (8)4.6.2 计算加在步进电动机转轴上的等效负载转矩Teq (9)4.6.3 步进电动机最大静转矩的选定 (10)4.6.4 步进电动机的性能校核 (11)5. 增量式旋转编码器的选用 (11)6. 绘制进给传动系统示意图 (12)7. 工作台控制系统的设计 (12)7.1数控系统硬件控制电路设计 (12)7.2辅助电路设计 (14)7.3系统控制软件设计 (15)8.步进电动机的驱动电源选用 (16)8.1电动机特性分析及细分驱动控制 (16)8.2步进电机电源驱动选用 (17)总结 (18)参考文献 (18)1.引言现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、总体方案设计1.1 设计任务设计一个数控X-Y 工作台及其控制系统。
该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm ,定位精度为0.025mm。
设计参数如下:负载重量 G=150N ;台面尺寸 C×B × H= 145mm × 160mm× 12mm ;底座外形尺寸 C1 × B1 × H1 = 210mm × 220mm × 140mm ;最大长度 L=388mm ;工作台加工范围X=55mm , Y=50mm ;工作台最大快移速度为 1m/min 。
1.2 总体方案确定(1)系统的运动方式与伺服系统由于工件在移动的过程中没有进行切削,故应用点位控制系统。
定位方式采用增量坐标控制。
为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y 工作台。
( 2)计算机系统本设计采用了与MCS-51 系列兼容的AT89S51 单片机控制系统。
它的主要特点是集成度高,可靠性好,功能强,速度快,有较高的性价比。
控制系统由微机部分、键盘、LED 、I/O 接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。
系统的加工程序和控制命令通过键盘操作实现。
LED 显示数控工作台的状态。
(3)X-Y 工作台的传动方式为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。
为提高传动刚度和消除间隙,采用预加负荷的结构。
由于工作台的运动载荷不大,因此采用有预加载荷的双 V 形滚珠导轨。
采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。
考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。
图 1-1系统总体框图二、机械系统设计2.1 、工作台外形尺寸及重量估算X向拖板(上拖板)尺寸:长宽高145×160× 50重量:按重量 =体积×材料比重估算1451605010 37.810 290 NY 向拖板(下拖板)尺寸:145 16050重量:约 90N。
上导轨座(连电机)重量:(22014038215582 )7.810 210 31.1 10 107 (N )夹具及工件重量:约150N。
X-Y 工作台运动部分的总重量:约287N 。
2.2 、滚动导轨的参数确定⑴、导轨型式:圆形截面滚珠导轨⑵、导轨长度①上导轨( X 向)取动导轨长度l B100动导轨行程l 55支承导轨长度L l B l 155②下导轨( Y 向)l50l B 100L 150选择导轨的型号:GTA16⑶、直线滚动轴承的选型①上导轨G X240(N )②下导轨G Y287( N )由于本系统负载相对较小,查表后得出LM10UUOP型直线滚动轴承的额定动载荷为370N,大于实际动负载;但考虑到经济性等因素最后选择LM16UUOP型直线滚动轴承。
并采用双排两列 4 个直线滚动轴承来实现滑动平台的支撑。
⑷、滚动导轨刚度及预紧方法当工作台往复移动时,工作台压在两端滚动体上的压力会发生变化,受力大的滚动体变形大,受力小的滚动体变形小。
当导轨在位置Ⅰ时,两端滚动体受力相等,工作台保持水平;当导轨移动到位置Ⅱ或Ⅲ时,两端滚动体受力不相等,变形不一致,使工作台倾斜α角,由此造成误差。
此外,滚动体支承工作台,若工作台刚度差,则在自重和载荷作用下产生弹性变形,会使工作台下凹(有时还可能出现波浪形),影响导轨的精度。
2.3 、滚珠丝杠的设计计算滚珠丝杠的负荷包括铣削力及运动部件的重量所引起的进给抗力。
应按铣削时的情况计算。
⑴、最大动负载Q的计算Q3L f f H P查表得系数f 1 , f H1,寿命值60nTL106查表得使用寿命时间T=15000h,初选丝杠螺距t=4mm,得丝杠转速1000V max1000 1n250( r / min)t4所以L 6025015000106225X向丝杠牵引力P x 1.414 f当G x( f当——当量摩擦系数 )1.4140.01240 3.39( N )Y向丝杠牵引力P y 1.414 f当G y1.4140.01287 4.06(N)所以最大动负荷X向Q x3 22511 3.3920.6(N )Y向Q y3 22511 4.0624.7(N )查表,取滚珠丝杠公称直径d010mm ,选用滚珠丝杠螺母副的型号为SFK1004 ,其额定动载荷为390N,足够用。
⑵、滚珠丝杠螺母副几何参数计算表 2-1滚珠丝杠螺母副几何参数名称符号计算公式和结果公称直径d010螺距t4接触角45o钢球直径d q2螺纹滚道螺纹滚道法面半径R R0.52d q 1.04偏心距e e R d q / 2 sin0.03螺纹升角arc tg t7.26od0螺杆外径d d d00.2 ~ 0.25 d q9.5螺杆螺杆内径d l d l d02e2R7.98螺杆接触直径 d z d z d0d q cos8.59螺母螺纹外径D D d02e 2R 12.02螺母螺母内径(外循环)D1D1d00.2 ~ 0.255 d q10.5见表 2-1 。
⑶、传动效率计算tg tg 7.26 o0.973tg ()tg (7.26 o0.2o )式中:——摩擦角;——丝杠螺纹升角。
⑷、刚度验算滚珠丝杠受工作负载P 引起的导程L0的变化量VL1PL0EFY向所受牵引力大,故应用Y 向参数计算P24.7( N )L00.4(cm)E20.6106 ( N / cm2 )材料为钢0.7982F R2 3.140.5 cm22所以VL124.7 0.5 1.210 6 (cm)20.61060.5丝杠因受扭矩而引起的导程变化量VL 2 很小,可以忽略。
所以导程总误差V VL1001.2 10 6 1003 m / mL 00.4查表知 E 级精度的丝杠允许误差15 m ,故刚度足够。
⑸、稳定性验算由于丝杠两端采用止推轴承,故不需要稳定性验算。
2.4 、步进电机的选用⑴、步进电机的步距角 b取系统脉冲当量p0.01mm/ step ,初选步进电机步距角b1.5o 。
⑵、步进电机启动力矩的计算设步进电机等效负载力矩为 T ,负载力为 P ,根据能量守恒原理,电机所做的功与负载力做功有如下关系T= Ps式中:——电机转角; s ——移动部件的相应位移;——机械传动效率。
若取b ,则 sp ,且 PP SG ,所以36 pP S G( N gcm)T2b式中: P S ——移动部件负载( N ); G ——移动部件重量( N ); P z ——与重量方向一致的作 用在移动部件上的负载力( N );——导轨摩擦系数;b ——步进电机步距角, ( rad ); T——电机轴负载力矩(N gcm )本例中,取0.03 (淬火钢滚珠导轨的摩擦系数),0.96 , P S 为丝杠牵引力, P s P H 24.7 N 。
考虑到重力影响, Y 向电机负载较大,因此取G G y 287N ,所以T36 0.01 24.70.03 28721.5 0.961.33( N gcm)若不考虑启动时运动部件惯性的影响,则启动力矩T qT0.3 ~ 0.5取安全系数为0.3 ,则T q1.334.42 N gcm0.3对于工作方式为三相六拍的三相步进电机Tj maxT q5.1N gcm0.866 ⑶、步进电机的最高工作频率1000V max1000 11667( Hz )f max60 p 60 0.01查表选用两个 45BF005-Ⅱ型步进电机。
电机的有关参数见表2-2 。
表 2-2步进电机参数主要技术数据外形尺寸 (mm)重量型 号步 最 大 最高空载 相 电压电流外径长度轴径(N )距 静转距启动频率 数(V )( A)角N gcm( step/ so)45BF005-Ⅱ 1.5 19.6 3000 3 27 2.5 45 58 4 112.5 、确定齿轮传动比因 步 进 电 机 步 距 角 b1.5o , 滚 珠 丝 杠 螺 距 t4mm , 要 实 现 脉 冲 当 量p0.01mm / step ,在传动系统中应加一对齿轮降速传动。
齿轮传动比Z 1p360o0.01 360 ib t1.5 0.6Z 24选 Z 1 17 , Z 228。
2.6 、确定齿轮模数及有关尺寸因传递的扭距较小,取模数m 1mm ,齿轮有关尺寸见表3-3 。
2.7 、步进电机惯性负载的计算Z表 2-3 齿轮尺寸17 28d mZ mmd a d 2m mm 1728 1930 14.525.5d f d 2 1.25m mm55 b 3 6 m mma d1 d217.5 mm2根据等效转动惯量的计算公式,得22J d J0 J1Z1J2J3MZ2p180b式中:J d——折算到电机轴上的惯性负载(kggcm2);J 0——步进电机转轴的转动惯量( kggcm2); J1——齿轮的转动惯量(kggcm2); J 2——齿轮的转动惯量(kggcm2);J3——滚珠丝杠的转动惯量(kggcm2);M——移动部件质量(kg )。
对材料为钢的圆柱零件转动惯量可按下式估算J0.7810 3 D 4L kggcm2式中: D——圆柱零件直径(cm);L——零件长度( cm)。
所以J10.7810 3 1.740.5 3.2610 3kg gcm2J20.7810 3 2.840.523.910 3kggcm2J30.7810 314 5 3.9 10 3 kggcm2电机轴转动惯量很小,可以忽略,则172J d 3.2610 323.9 3.9 10 3282250.0010.4 10 5kggm23.14 1.51801J0.4因为d0.319 1 ,所以惯性匹配比较符合要求。
4M1.274 J三、控制系统硬件设计X-Y 数控工作台控制系统硬件主要包括CPU 、传动驱动、传感器、人机交互界面。
硬件系统设计时,应注意几点:电机运转平稳、响应性能好、造价低、可维护性、人机交互界面可操作性比较好。
3.1 CPU 板3.1.1 CPU的选择随着微电子技术水平的不断提高,单片微型计算机有了飞跃的发展。
单片机的型号很多,而目前市场上应用MCS-51 芯片及其派生的兼容芯片比较多,如目前应用最广的8 位单片机89C51,价格低廉,而性能优良,功能强大。
在一些复杂的系统中就不得不考虑使用16 位单片机, MCS-96 系列单片机广泛应用于伺服系统,变频调速等各类要求实时处理的控制系统,它具有较强的运算和扩展能力。
但是定位合理的单片机可以节约资源,获得较高的性价比。