雷达空间目标识别技术综述
雷达的目标识别技术
雷达的目标识别技术摘要:对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明:采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。
一.引言随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。
地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。
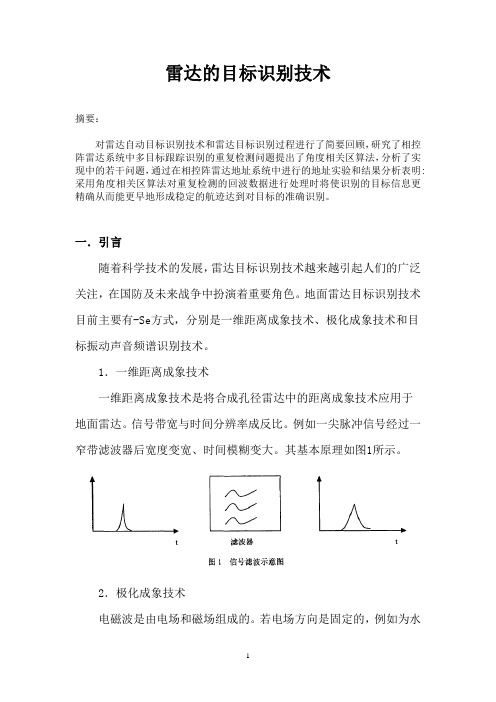
1.一维距离成象技术一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。
信号带宽与时间分辨率成反比。
例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。
其基本原理如图1所示。
2.极化成象技术电磁波是由电场和磁场组成的。
若电场方向是固定的,例如为水平方向或垂直方向,则叫做线性极化电磁波。
线性极化电磁波的反射与目标的形状密切相关。
当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。
根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。
通过计算目标散射矩阵便可以识别目标的形状。
该方法对复杂形状的目标识别很困难。
3.目标振动声音频谱识别技术根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。
通过解调反射电磁波的频率调制,复现目标振动频谱。
根据目标振动频谱进行目标识别。
传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。
点状目标的回波宽度等于入射波宽度。
一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。
通过目标回波宽度的变化可估计目标的大小。
目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。
雷达的目标识别技术
雷达的目标识别技术摘要:对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明:采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。
一.引言随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。
地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。
1.一维距离成象技术一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。
信号带宽与时间分辨率成反比。
例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。
其基本原理如图1所示。
2.极化成象技术电磁波是由电场和磁场组成的。
若电场方向是固定的,例如为水平方向或垂直方向,则叫做线性极化电磁波。
线性极化电磁波的反射与目标的形状密切相关。
当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。
根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。
通过计算目标散射矩阵便可以识别目标的形状。
该方法对复杂形状的目标识别很困难。
3.目标振动声音频谱识别技术根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。
通过解调反射电磁波的频率调制,复现目标振动频谱。
根据目标振动频谱进行目标识别。
传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。
点状目标的回波宽度等于入射波宽度。
一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。
通过目标回波宽度的变化可估计目标的大小。
目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。
目标检测模型的雷达图像识别研究综述
目标检测模型的雷达图像识别研究综述作者:茹晓俭汪光旺陈斌张峥峥来源:《中国新通信》2024年第08期摘要:探地雷达(GPR)检测技术是目前城市道路脱空检测中常用的无损检测技术。
传统的探地雷达检测方法需要人工对雷达图像进行识别,但这种方式容易出现漏检、误检和效率低下等问题,严重影响检测结果的准确性。
通过基于深度学习的目标检测网络对雷达图像进行识别可以避免这些问题,目标检测算法已经在图像和视频中证明了识别各种类型物体的能力。
虽然目前关于探地雷达图像检测的研究还不够充分,但本文总结了探地雷达技术与常用的目标检测网络模型在路基病害检测方面的研究成果。
关键词:图像检测;目标检测网络;探地雷达;路基病害一、引言城市道路是城市交通安全平稳运行的关键,道路情况直接影响人们出行的舒适与安全。
在城市道路的长期服役中,路基h会不可避免地产生缺陷(如空洞和疏松等病害)。
定期对路基进行检测、判断病害类型,并及时修复对维护道路安全具有十分重要的意义。
探地雷达(GPR)检测技术是目前城市道路脱空检测中常用的无损检测技术。
传统方法中常用人工判读分析,通过识别雷达图像中的双曲线特征来判断病害。
然而,人工判读存在效率低、主观性强、耗时耗力等问题,影响了技术的推广应用。
近年来,随着深度学习技术的发展,基于目标检测网络的研究对探地雷达图像识别取得了进展,解决了传统方法依赖操作人员经验和耗费人力物力的问题。
病害检测评估模型,基于深度学习的目标检测网络识别结果最终与现行城市道路病害规范城市地下病害体综合探测与风险评估技术标准综合考虑,做出对病害治理最准确的判断。
将目标检测模型应用于探地雷达图像识别具有重要的现实意义和应用价值。
通过训练和优化目标检测模型,可以实现地下目标的自动识别和定位,提高探测的准确性和效率。
这不仅支持地质勘探和考古挖掘,还帮助工程师和研究人员更好地了解地下结构,为城市规划和土木工程设计提供决策依据。
二、深度学习网络模型简介深度学习模型是一种利用人工神经网络模拟和学习人类大脑神经网络,从数据中获取知识和经验的机器学习算法。
雷达测量中的目标识别与跟踪技术

雷达测量中的目标识别与跟踪技术引言雷达技术作为一种广泛应用于军事、航空、航海和交通领域的测量技术,一直以来都备受关注和研究。
在雷达应用领域中,目标识别与跟踪技术是十分重要的一个研究方向,主要用于确定被测目标的特征或性质,随后跟踪该目标的运动变化。
本文将深入探讨雷达测量中的目标识别与跟踪技术。
一、雷达目标识别技术1. 散射截面及目标特征分析雷达识别某一特定目标的首要问题是确定目标的散射截面。
散射截面的值决定了目标对雷达波的反射程度,与目标的形状、大小和边缘特性等有关。
目标特征分析可以帮助确定不同目标之间的差异,并提供用于识别目标的信息。
2. 多普勒特征分析多普勒效应是指由于目标的运动而引起的接收信号频率发生变化的现象。
通过分析接收信号的多普勒频移,可以获得目标的运动状态、速度和方向,从而进一步识别目标。
3. 反射波束特征分析雷达工作时产生的波束会与目标发生相互作用,反射出的信号会带有目标的形状和结构信息。
通过分析返回信号的波束特征,可以推测出目标的形状、方位和内部结构等,为目标识别提供重要线索。
二、雷达目标跟踪技术1. 滤波器与滤波技术针对目标跟踪问题,滤波器是一种常用的处理手段。
常见的滤波器有卡尔曼滤波器、粒子滤波器和无迹卡尔曼滤波器等。
这些滤波器通过对雷达信号进行滤波处理,估计目标的状态并持续跟踪目标运动。
2. 目标运动模型目标运动模型是描述目标运动规律的数学模型。
常见的目标运动模型有匀速模型、自由加速度模型和粒子模型等。
通过建立适当的目标运动模型,可以更好地预测目标的运动行为,提高目标跟踪的准确性和鲁棒性。
3. 数据关联算法数据关联算法是在已知目标状态的情况下,根据测量数据关联目标和测量结果,并进行目标跟踪的一种方法。
常见的数据关联算法有最近邻算法、卡尔曼滤波算法和粒子滤波算法等。
这些算法能够有效处理多目标跟踪问题,提高跟踪性能。
三、雷达目标识别与跟踪在实际应用中的挑战与展望1. 复杂环境下的干扰雷达目标识别与跟踪在实际应用中面临着复杂的环境干扰,比如地形变化、气象条件和其他电磁源等。
雷达信号处理中的目标识别与特征提取方法

雷达信号处理中的目标识别与特征提取方法雷达信号处理是一种关键的技术,在许多领域中都有广泛的应用。
目标识别与特征提取是雷达信号处理的重要任务之一。
通过分析雷达接收到的信号,我们可以识别出不同的目标,并提取出与目标相关的特征信息。
本文将介绍雷达信号处理中常用的目标识别与特征提取方法。
一、目标识别方法目标识别是指将雷达接收到的信号与已知目标模型进行比对,从而确定目标的类别。
常用的目标识别方法包括以下几种:1. 信号处理与匹配滤波:匹配滤波是一种经典的目标识别方法。
它利用目标的特征信息构建一个滤波器,将雷达接收到的信号与滤波器进行卷积运算,得到目标的匹配度。
通过设置合适的阈值,即可识别目标。
2. 统计判决方法:统计判决方法利用目标的统计特征进行目标识别。
常用的统计判决方法包括贝叶斯判决、最小距离判决等。
这些方法通过建立目标的统计模型,并根据观测到的信号特征进行判决,从而实现目标的识别。
3. 特征匹配方法:特征匹配方法利用目标的特征信息进行目标识别。
常用的特征匹配方法包括相关匹配、相位匹配等。
这些方法通过计算目标特征之间的相似度,从而确定目标的类别。
特征匹配方法具有较高的准确性和鲁棒性,广泛应用于雷达目标识别中。
二、特征提取方法特征提取是指从雷达接收到的信号中提取出与目标相关的特征信息。
目标的特征信息可以包括目标的形状、尺寸、运动状态等。
常用的特征提取方法包括以下几种:1. 波形特征提取:波形特征提取是从雷达接收到的信号波形中提取出目标的特征信息。
常用的波形特征包括峰值、频率、幅度等。
通过分析这些波形特征,可以识别出目标的一些基本特征。
2. 多普勒频谱特征提取:多普勒频谱特征提取是从雷达接收到的信号的多普勒频谱中提取出目标的特征信息。
通过分析多普勒频谱的幅度、频率等特征,可以识别出目标的运动状态。
3. 极化特征提取:极化特征提取是从雷达接收到的信号的极化信息中提取出目标的特征信息。
雷达信号的极化信息包括目标的极化散射矩阵等。
雷达目标识别技术

雷达目标识别技术1.引言雷达目标识别(RTR—Radar Target Recognition)是指利用雷达对单个目标或目标群进行探测,对所获取的信息进行分析,从而确定目标的种类、型号等属性的技术。
目前,经过国内外同行的不懈努力,应该说雷达目标识别技术已经在目标特征信号的分析和测量、雷达目标成像与特征抽取、特征空间变换、目标模式分类、目标识别算法的实现技术等众多领域都取得了不同程度的突破,雷达目标识别技术已成功应用于星载或机载合成孔径雷达地面侦察、毫米波雷达精确制导等方面。
但是,雷达目标识别技术还远未形成完整的理论体系,现有的雷达目标识别系统在功能上都存在一定程度的局限性,其主要原因是由于目标类型和雷达体制的多样化以及所处环境的极端复杂性。
本文讨论了目前理论研究和应用比较成功的几类雷达目标识别方法:基于目标运动的回波起伏和调制谱特性的目标识别方法、基于极点分布的目标识别方法、基于高分辨雷达成像的目标识别方法和基于极化特征的目标识别方法,同时讨论了问题的可能解决思路。
2. 雷达目标识别技术的回顾雷达目标识别的研究始于20世纪50年代,早期雷达目标特征信号的研究工作主要是研究目标的有效散射截面积。
但是,对形状不同、性质各异的各类目标,笼统用一个有效散射面积来描述,就显得过于粗糙,也难以实现有效识别。
几十年来,随着电磁散射理论的不断发展以及雷达技术的不断提高,在先进的现代信号处理技术条件下,许多可资识别的雷达目标特征信号相继被发现,从而建立起了相应的目标识别理论和技术。
雷达目标分类与识别已成为现代雷达的重要发展方向,也是未来雷达的基本功能之一。
目标识别的基本原理是利用雷达回波中的幅度、相位、频谱和极化等目标特征信息,通过数学上的各种多维空间变换来估算目标的大小、形状、重量和表面层的物理特性参数,最后根据大量训练样本所确定的鉴别函数,在分类器中进行识别判决。
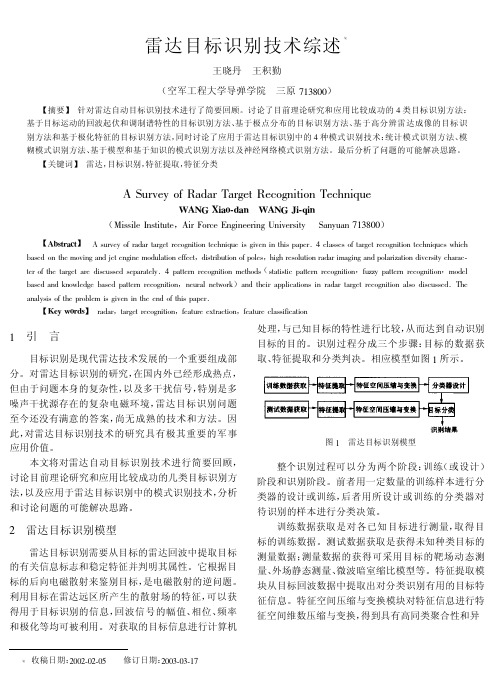
原则上,任何一个雷达目标识别系统均可模化为图1所示的基本结构。
雷达信号处理中的目标识别与跟踪研究

雷达信号处理中的目标识别与跟踪研究雷达(Radar)是一种利用电磁波进行探测和测距的技术。
它通过发射脉冲电磁波并接收其反射信号,利用信号的时间延迟和频率特征来探测和跟踪周围的目标物体。
在雷达信号处理中,目标识别与跟踪是两个重要的研究方向,它们对于实现雷达的自主目标探测和跟踪具有重要作用。
目标识别是在雷达信号中确定目标的位置、速度和其他特征属性的过程。
它的主要任务是将雷达接收到的信号与预先建立的目标模型进行匹配,通过特征提取和目标比对算法来判断目标是否存在。
目标识别可以分为传统方法和深度学习方法两种。
传统的目标识别方法主要依靠数学模型和信号处理算法。
常见的方法包括卡尔曼滤波器、最小二乘估计以及基于特征提取的算法等。
这些方法通过对信号的频谱、时频分析和特征提取等技术手段,对目标进行匹配和判断。
虽然传统方法在一定程度上可以实现目标识别,但是在处理复杂场景和目标变化较大的情况下效果有限。
近年来,深度学习方法在目标识别领域取得了显著的成果。
深度学习利用神经网络模型对大量数据进行训练,实现对数据的高级特征提取和模式识别。
在雷达信号处理中,深度学习可以利用卷积神经网络(CNN)和循环神经网络(RNN)等网络结构,对雷达信号进行直接处理和分类。
这种端到端的学习方式能够更好地解决目标识别中的非线性、多样性和时变性等问题。
目标跟踪是在目标识别基础上,在雷达扫描过程中连续追踪目标运动状态的过程。
目标跟踪的主要任务是通过对雷达接收到的连续信号进行滤波和关联,预测目标的位置和运动轨迹,实现实时监测和跟踪。
目标跟踪可以分为基于滤波的方法和基于关联的方法两种。
基于滤波的目标跟踪方法主要应用卡尔曼滤波器和扩展卡尔曼滤波器等算法。
这些方法通过建立目标的状态空间模型,对目标位置和速度进行状态估计和预测。
通过更新观测信息,不断优化目标的运动轨迹。
这种方法简单且实时性较好,适用于快速目标跟踪。
基于关联的目标跟踪方法主要利用关联算法对连续的雷达信号进行处理。
雷达系统的信号处理与目标识别算法分析

雷达系统的信号处理与目标识别算法分析一、引言雷达(Radar)系统是一种利用电磁波对目标进行跟踪和探测的设备。
随着科技的进步和各个领域对雷达系统的需求增加,雷达的信号处理和目标识别算法变得更加重要。
本文将对雷达系统的信号处理和目标识别算法进行深入分析。
二、雷达原理和信号处理雷达系统利用发送出去的电磁波与被目标反射回来的电磁波之间的时间差和频率差来测量目标的距离和速度。
在雷达信号处理中,需要对接收到的信号进行一系列的处理,以提取出有用的信息。
1. 预处理预处理是信号处理的第一步,其目的是将原始信号转换为能够提供更多信息的形式。
其中包括抗干扰处理、时延或频率的补偿、动态范围的优化等。
2. 目标检测目标检测是雷达信号处理中的核心环节。
常用的目标检测算法包括:常规滤波器法、匹配滤波器法、CFAR(恒虚警率)检测法等。
这些算法可以利用雷达信号与背景噪声之间的差异来检测出目标的存在。
3. 脉冲压缩脉冲压缩是为了提高雷达系统的距离分辨率。
通过对返回的一系列脉冲信号进行加权和积累,可以将相邻脉冲之间的能量对比增大,从而提高目标分辨能力。
4. 构建回波信号的径向速度信息雷达系统可以利用多普勒效应测量目标的速度。
在信号处理中,可以通过采用FFT(快速傅里叶变换)等算法,将时间域的信号转换到频率域,从而得到目标的速度信息。
三、目标识别算法分析目标识别是在得到目标的距离、速度等信息后,进一步对目标进行分类和识别的过程。
目标识别算法需要从海量的目标数据中提取出有效特征,并进行合理的分类和判别。
1. 特征提取特征提取是目标识别的重要环节。
常用的特征包括目标的形状、反射率、运动轨迹等。
常用的特征提取算法有:HOG(方向梯度直方图)、SIFT(尺度不变特征变换)、CNN(卷积神经网络)等。
2. 分类和判别在得到目标特征后,需要通过分类和判别算法将目标进行识别。
常用的分类算法有支持向量机(SVM)、最近邻(k-NN)和深度学习等。
雷达目标识别技术研究及应用

雷达目标识别技术研究及应用引言雷达目标识别技术作为一项重要的军事技术,在军事领域的应用已经非常广泛。
随着科技的不断发展,雷达目标识别技术也得到了不断的更新和升级,使得其在军事上的应用越来越广泛、越来越强大。
本文将就雷达目标识别技术进行深入的研究和分析,并对其在广泛应用中所取得的优异成果进行深入探讨。
一、雷达目标识别技术的概述雷达目标识别技术,简单来说,就是通过雷达技术,对目标的形态、特征、物性等进行采集和分析,将目标与其他物体进行区分的技术。
在军事领域中,雷达目标识别技术被广泛应用于敌我识别、空中情报、目标跟踪、导弹制导、防空预警等领域,在实现战场手段的精细化、多样化上发挥了重要的作用。
目前,雷达目标识别技术主要分为多个方向,其中常见的方向包括基于物理特征的目标识别、基于雷达信号特征的目标识别和基于图像处理的雷达目标识别。
这些方向分别有其优点和缺点,在实际应用中,需要根据不同场景、不同任务需求,精选合适的方向和技术手段。
二、基于物理特征的目标识别技术基于物理特征的雷达目标识别技术,主要是通过对目标物理特性的分析来识别目标。
目前应用较广的方法包括极化特征、形态特征、散射截面等。
其中,通过极化分析,可以利用目标表面的材料、纹理等特征进行目标识别;而通过形态分析,则可利用目标的几何形态、表面形态等进行目标识别。
基于物理特征的雷达目标识别技术以其识别准确率高、鲁棒性好等特点,被广泛的应用于目标识别任务。
在飞机、舰船、车辆等目标的识别中取得了显著的成果。
但是,同时也存在着目标复杂性高,目标表面特征丰富,识别算法繁琐等问题。
三、基于雷达信号特征的目标识别技术基于雷达信号特征的目标识别技术,主要是通过对目标信号的特征进行分析,确定目标的种类和型号。
其主要依托于雷达工作原理中的回波信号处理理论,通过分析接收到的目标雷达信号的频率、振幅、相位等参数,从而实现目标识别。
基于雷达信号特征的目标识别技术具有所需数据量少、识别自动化程度高等优点,已经得到广泛的应用。
基于雷达数据的目标识别与跟踪技术研究

基于雷达数据的目标识别与跟踪技术研究目标识别与跟踪技术在现代雷达应用中扮演着至关重要的角色。
通过准确地识别和跟踪目标,雷达系统能够提供关键的信息,用于军事、民用和科研等领域。
本文将讨论基于雷达数据的目标识别与跟踪技术的研究进展和应用。
一、目标识别技术研究目标识别是雷达中的一个关键任务,旨在将雷达数据转化为可理解的目标信息。
目标识别技术可以通过提取目标的特征来实现,例如目标的形状、尺寸、运动模式等。
1.1 特征提取技术特征提取是目标识别的核心环节。
雷达数据中的目标特征包括雷达散射截面、速度、加速度、运动方向等。
通过分析目标的散射特性和运动状态,可以有效地区分目标与背景杂波,从而实现目标识别。
1.2 机器学习方法机器学习在目标识别技术中扮演着重要的角色。
通过对大量的雷达数据进行训练和学习,可以构建有效的分类模型,实现目标的自动识别。
常用的机器学习算法包括支持向量机(SVM)、人工神经网络(ANN)和决策树等。
二、目标跟踪技术研究目标跟踪是指通过连续观测,估计目标的位置、速度和方向等参数的技术。
在雷达应用中,目标跟踪技术被广泛用于跟踪移动目标,如飞机、船只和车辆等。
2.1 滤波器方法滤波器方法是目标跟踪中常用的技术之一。
常见的滤波器包括卡尔曼滤波器、粒子滤波器和扩展卡尔曼滤波器等。
这些滤波器通过观测数据和状态方程来预测和更新目标的状态,从而实现目标跟踪。
2.2 轨迹关联方法轨迹关联是在多个雷达观测周期内识别和关联目标的独立轨迹的技术。
轨迹关联方法可以通过分析目标的运动模式、速度差异和相对距离等参数,实现目标的跟踪和关联。
三、目标识别与跟踪技术的应用目标识别与跟踪技术在军事、民用和科研等领域有着广泛的应用。
3.1 军事应用在军事领域,目标识别与跟踪技术被广泛用于军事侦察、目标导航和作战决策等方面。
通过实时准确地识别和跟踪敌方目标,可提供关键的情报支持,增强军事作战的效能和胜算。
3.2 民用应用在民用领域,目标识别与跟踪技术被应用于雷达气象、交通监控和智能驾驶等方面。
雷达信号处理中的目标识别技术

雷达信号处理中的目标识别技术雷达作为现代武器系统中不可缺少的一部分,具有广泛的应用。
在使用过程中,雷达需要将接收到的信号进行处理,以实现对目标的探测与识别。
其中,目标识别技术是雷达信号处理中的重要组成部分,也是决定雷达性能和作战效果的关键因素之一。
一、目标特征提取目标识别技术的核心是目标特征提取,即通过对雷达接收到的信号进行分析和处理,提取出与目标相关的特征信息。
目标特征主要包括散射特征、运动特征和形态特征等。
其中,散射特征是指目标使雷达接收到的电磁波在空间和时间上的分布特性,通常用雷达截面积(RCS)来描述;运动特征是指目标运动的速度、方向和加速度等,可以通过多普勒频移和相位变化等特征进行提取;形态特征是指目标的几何形状、轮廓和纹理等,常用的提取方法包括边缘检测、轮廓提取、特征点匹配等。
目标特征的提取方法有很多种,如时域分析、频域分析、小波分析、深度学习等。
其中,时域分析是最基本和常用的方法之一,目标的散射信号通常通过时域信号处理进行分析和处理,得到目标的距离、径向速度和加速度等信息;频域分析则是通过傅里叶变换等方法将信号变换到频域,从而获得目标的频率和幅值等信息;小波分析是一种新型的信号处理方法,它通过小波变换将信号分解为多个不同频率的子带,以提高信号处理的精度和效率;深度学习则是近年来兴起的一种人工智能技术,通过神经网络等方法对海量数据进行学习和训练,以实现目标特征的高效提取和识别。
二、目标分类和识别目标特征提取后,还需要对目标进行分类和识别,即根据特征信息将目标归类到不同的目标库中,并判断目标是否是敌我识别。
目标分类和识别的方法主要包括基于特征匹配、基于统计分类、基于神经网络等多种方法。
基于特征匹配的方法是将目标特征与目标库中已知的目标特征进行比对,通过一定的相似度判断将目标归类到相应的目标类型中。
该方法需要建立大量的目标库,对目标特征的匹配精度以及库中目标的类型和数量要求较高,适用于目标类型比较固定的场景。
雷达目标识别技术
.
特 征提 取是从 测量 空间 中选 取 出有 效反 映 目标特 征 有 利 于 目标分 类识
。 .
别 的特 征参量 所提 取的 目标特 征参量 形成 特征 空 间 特征 空 间变换 是为 了 得 到 更高 的 类别 之 间的 可分 离性 以 便 于 判决 和分 类 把 被识 别的对象 归为某一 类 型
996
年第
期
现 代 电子
总第
7
期
雷 达 目标 识 别 技 术
曲 长文
( 海军航 空 工程学院
,
山东烟 台
2 6 4 。。1 )
摘要
。
蓄达 目标识别 作为雷 达 技术发 展的 必 然 成 为 现代雷 达技术重 要 的研 究方 向 之 一 虽 然 雷
. ,
,
达 目标识别技术的研 究有一定的进 展 但还没 有到完全解 决 问 题的 阶段 仅仅 是 广 泛进行研 究的 开端 本文对 目前几种 主 要的雷达 目标识别技 术作了阐述 期 望对雷 达 目标识别 技术的研究概貌
.
、
及 雷 达体制 问题
’
雷 达获 获 取 信息 息
特 提
征 取
特征 空 间变换 换
分 判
类 决
目 标 特 征库 库
1
图
雷达 目标识别过 程
3
雷达 目标 识别技术
雷 达 目标识别 的实质 是 电 磁 逆散 射 间题 即 已 知 入 射波 和 散 射波 反演 目标特 性 在这 种方
,
。
法 中 通 过逆 解 目标 的散 射场积分 方 程而得到 目标的特 征信 息
。
,
,
雷 达 目标识 别过 程
雷 达 目标识 别过 程 如 图
雷达的目标识别技术

雷达的目标识别技术摘要:对雷达自动目标识别技术和雷达目标识别过程进行了简要回顾,研究了相控阵雷达系统中多目标跟踪识别的重复检测问题提出了角度相关区算法,分析了实现中的若干问题,通过在相控阵雷达地址系统中进行的地址实验和结果分析表明: 采用角度相关区算法对重复检测的回波数据进行处理时将使识别的目标信息更精确从而能更早地形成稳定的航迹达到对目标的准确识别。
一 .引言随着科学技术的发展,雷达目标识别技术越来越引起人们的广泛关注,在国防及未来战争中扮演着重要角色。
地面雷达目标识别技术目前主要有-Se方式,分别是一维距离成象技术、极化成象技术和目标振动声音频谱识别技术。
1.一维距离成象技术一维距离成象技术是将合成孔径雷达中的距离成象技术应用于地面雷达。
信号带宽与时间分辨率成反比。
例如一尖脉冲信号经过一窄带滤波器后宽度变宽、时间模糊变大。
其基本原理如图1所示。
滤波器图1侑号海波示意图2.极化成象技术电磁波是由电场和磁场组成的。
若电场方向是固定的,例如为水平方向或垂直方向,则叫做线性极化电磁波。
线性极化电磁波的反射与目标的形状密切相关。
当目标长尺寸的方向与电场的方向一致时,反射系数增大,反之减小。
根据这一特征,向目标发射不同极化方向的线性极化电磁波,分别接收它们反射(散射)的回波。
通过计算目标散射矩阵便可以识别目标的形状。
该方法对复杂形状的目标识别很困难。
3.目标振动声音频谱识别技术根据多普勒原理,目标的振动、旋转翼旋转将引起发射电磁波的频率移动。
通过解调反射电磁波的频率调制,复现目标振动频谱。
根据目标振动频谱进行目标识别。
传统上我国地面雷达主要通过两个方面进行目标识别:回波宽度和波色图。
点状目标的回波宽度等于入射波宽度。
一定尺寸的目标将展宽回波宽度,其回波宽度变化量正比于目标尺寸。
通过目标回波宽度的变化可估计目标的大小。
目标往往有不同的强反射点,如飞机的机尾、机头、机翼以及机群内各飞机等,往往会在回波上形成不同形状的子峰,如图2所示。
雷达目标识别

雷达目标识别雷达目标识别是一种利用雷达技术来识别目标的方法。
雷达(Radar)是一种利用电磁波进行探测和测量的技术,其工作原理类似于声纳。
通过发送一束电磁波并接收其反射回来的信号,雷达可以探测到目标物体的存在和位置,并进一步对目标进行识别和特征提取。
目标识别是雷达技术中一个重要的应用领域。
目标识别主要通过对雷达返回信号进行分析,从中提取目标的特征信息,并与事先建立的目标数据库进行比对,进而确定目标的身份和属性。
目标识别可以应用于多个领域,如军事防御、航空航天、交通监控等。
在雷达目标识别中,首先需要对雷达返回信号进行预处理,以去除噪声和杂波干扰,并提取目标的特征信息。
常用的特征包括目标的尺寸、形状、速度、方向等。
这些特征可以通过波形分析、频谱分析、图像处理等方法来提取。
在目标识别过程中,可以根据目标的特征信息进行分类和识别。
常见的分类方法包括基于模式识别的方法、基于机器学习的方法等。
基于模式识别的方法主要是通过比对目标的特征信息与事先建立的目标数据库,来确定目标的身份。
而基于机器学习的方法则是通过将大量的目标数据输入到机器学习模型中,从中学习并建立目标的识别规则。
在雷达目标识别中,有一些常用的算法和技术,如相关器识别算法、最小二乘法、径向基函数网络等。
这些算法和技术可以对目标进行分类、特征提取和参数估计,从而实现对目标的准确识别。
总之,雷达目标识别是一种利用雷达技术对目标进行识别和分类的方法。
通过对雷达返回信号进行分析和处理,可以提取目标的特征信息,并与目标数据库进行比对,从而实现对目标的准确识别。
雷达目标识别在军事、航空航天、交通等领域具有重要的应用价值,可以为相关领域的决策提供有效支持。
雷达跟踪系统中的目标探测与识别技术
雷达跟踪系统中的目标探测与识别技术雷达技术一直在航空、导航、军事等领域扮演着重要的角色。
雷达跟踪系统中的目标探测与识别技术是其中至关重要的一环。
本文将探讨雷达目标探测与识别的相关技术,以及当前的研究和发展趋势。
第一部分:目标探测技术雷达目标探测是指利用雷达系统进行目标的探测与确认。
传统上,雷达系统使用连续波雷达或脉冲雷达进行目标的探测。
连续波雷达通过发送连续的电磁波并接收被目标散射的波,根据接收到的信号来判断目标是否存在。
脉冲雷达则利用发射短时脉冲的方式来检测被目标反射的脉冲信号。
然而,随着科技的不断发展,新的目标探测技术也应运而生。
比如,目标探测技术中的成像雷达,它能够获取目标的图像信息,从而实现对目标的更准确的探测。
成像雷达通过发射短脉冲序列,并利用波束形成和合成孔径雷达技术,可以获取目标的三维形状和位置信息。
第二部分:目标识别技术雷达目标识别是指根据目标的雷达特性,对目标进行分类和识别。
传统上,目标识别主要依靠目标的回波信号的特征,如目标的反射截面、多普勒频移等。
基于这些特征,通过与数据库进行匹配或者使用特征提取算法,可以对目标进行分类和识别。
近年来,随着人工智能和深度学习的发展,新的目标识别技术也逐渐兴起。
深度学习技术可以从大量的数据中学习和识别特征,从而实现对目标的自动分类和识别。
例如,通过构建深度神经网络模型,并使用大量的雷达图像数据进行训练,可以实现对雷达目标的高效自动识别。
第三部分:研究和发展趋势雷达目标探测与识别技术正不断地发展和演进。
未来的研究和发展趋势有以下几个方向:1. 多传感器融合:将雷达与其他各种传感器技术相结合,如红外传感器、光学传感器等,以形成更完整、准确的目标探测与识别系统。
2. 多维信息提取:除了传统的距离和速度等信息外,还可以提取更多维度的信息,比如目标的形状、材料组成等,以更全面地识别和判别目标。
3. 实时目标跟踪:目标跟踪是对目标在时间上的连续追踪。
未来的目标跟踪技术将更加注重对目标的轨迹、运动模式等动态信息的捕捉和分析。
利用雷达数据进行目标识别及跟踪
利用雷达数据进行目标识别及跟踪雷达是一种电子测量技术,利用无线电波在空间中传播,并接收和处理由目标反射回来的反射波。
利用雷达技术对目标进行识别和跟踪已经成为现代军事和民用领域中的重要应用。
本文将探讨如何通过雷达数据实现目标识别和跟踪。
一、雷达技术的基本原理雷达技术的基本原理是通过发射无线电波,将它们从目标上反射回来,并测量其时间和频率,以确定目标的位置、速度和方向。
雷达系统由发射机、接收机、天线和处理器组成。
发射机产生连续的射频信号,经天线后发射出去。
当信号碰到目标时,会被反射回来,信号经天线再次进入接收机。
接收机会对信号进行放大和处理,以提取目标信息。
处理器将提取的信息转换成有用的数据,如目标的位置、速度和方向等。
二、雷达数据的分析与处理雷达数据的分析与处理是雷达技术中最重要的环节之一。
雷达数据可以包含大量的信息,如目标反射强度、距离、速度、方位角和高程等。
在进行目标识别之前,需要对雷达数据进行预处理和滤波。
预处理的主要任务是将原始数据转换成可视化的格式,以方便对数据进行分析和处理。
滤波则是为了去除噪声,保留有用的信号,以提高目标识别的准确性和可靠性。
进行目标识别时,需要根据目标的特征进行分类。
目标的特征包括反射强度、速度、方位角和高程等。
通过对这些特征的分析和处理,可以确定目标的类别和属性。
三、雷达数据的目标跟踪目标跟踪是利用雷达数据对目标的运动轨迹进行预测和跟踪的过程。
目标跟踪的主要任务是在目标动态变化的情况下,对其位置进行准确预测和跟踪。
目标跟踪的算法可以分为传统算法和智能算法两类。
传统算法主要包括卡尔曼滤波、贝叶斯滤波和粒子滤波等。
智能算法则包括人工神经网络、遗传算法和模糊逻辑等。
四、雷达技术在军事上的应用雷达技术在军事上的应用主要包括目标识别和跟踪、雷达导航、目标指引和武器制导等。
其中,目标识别和跟踪是一项关键技术,可以帮助军事指挥部对敌方军事活动进行监测和预警。
在现代战争中,雷达技术的发展已经成为军事优势的重要标志之一。
激光雷达目标识别技术
激光雷达目标识别技术激光雷达是一种使用激光束测量和捕捉周围环境的传感器。
它能够提供高精度、高分辨率的三维空间信息,被广泛应用于自动驾驶、机器人导航、工业测绘等领域。
在这些应用中,激光雷达的目标识别技术起着至关重要的作用。
激光雷达目标识别技术的核心是根据激光束与目标物体之间的交互作用,提取目标物体的特征信息,并将其与已知的目标特征进行比对和匹配,从而实现目标的识别和分类。
首先,激光雷达通过发射激光束并感知回波信号来获取周围环境的点云数据。
然后,通过对点云数据进行处理和分析,提取出目标物体的特征信息。
常见的目标特征包括目标的形状、尺寸、高度、位置等。
在目标特征提取的过程中,常用的算法包括点云分割、特征提取和特征描述。
点云分割算法通过将点云数据分割成多个区域,将目标物体从周围的背景中分离出来。
特征提取算法利用目标物体的局部特征,如曲率、法线方向等,来描述目标的形状和表面特征。
特征描述算法将提取到的特征进行编码和压缩,以便于后续的识别和分类。
目标识别是激光雷达应用中的关键问题之一。
根据目标的不同特征,可以将目标分为点云目标和物体目标两类。
点云目标是指具有明显表面特征的目标,如建筑物、道路、树木等;物体目标是指具有立体结构和形状的目标,如车辆、行人、动物等。
针对点云目标的识别,常用的方法是基于图像处理的技术。
首先,将点云数据转化成二维图像,然后利用图像处理的算法和技术进行目标的检测、分割和分类。
这种方法能够利用图像处理的成熟技术和算法,有效地提取目标的表面特征,但对于复杂的场景和目标物体,识别的准确度和鲁棒性有一定的局限性。
针对物体目标的识别,常用的方法是基于点云的几何特征和形状特征。
对于车辆目标的识别,可以利用车辆的几何特征,如车身的形状、尺寸和旋转角度等进行识别和分类。
对于行人目标的识别,可以利用行人的立体结构和运动特征进行识别和分类。
这种方法在目标的几何特征和形状特征的提取上更具优势,能够实现高精度的目标识别和分类。
雷达测量中的目标识别与跟踪技术

雷达测量中的目标识别与跟踪技术雷达是一种广泛应用于军事和民用领域的无线电探测设备,可以通过发射和接收电磁波来探测和跟踪目标。
雷达测量中的目标识别与跟踪技术在现代社会中发挥着重要作用,不仅有助于军事作战,还广泛应用于航空、航海、气象、交通等领域。
一、雷达目标识别技术雷达目标识别技术是指通过分析雷达回波信号的特征,确定目标的类型和性质。
目标识别可以通过目标的尺寸、形状、反射截面以及运动轨迹等特征来实现。
在雷达目标识别中,一种常见的方法是基于目标的回波信号的频率谱。
不同目标对电磁波的反射能力不同,因此其回波信号的频谱也不同。
通过比对已知目标的频谱特征和实际回波信号的频谱,可以对目标进行识别。
另一种常用的目标识别技术是基于目标的散射特性。
目标与电磁波相互作用,产生散射现象。
通过分析目标的散射信号,可以了解目标的形状、结构以及材料成分,从而实现目标的识别。
此外,雷达目标识别还可以通过目标的运动特征来实现。
不同类型的目标在运动过程中表现出不同的特征,比如速度、加速度等。
通过分析目标的运动特征,可以对目标进行分类和识别。
二、雷达目标跟踪技术雷达目标跟踪技术是指通过分析雷达回波信号,实时追踪目标的位置、速度和轨迹等信息。
目标跟踪是雷达应用于实际场景中的重要环节,对于实现有效的目标探测和监测至关重要。
在雷达目标跟踪中,一种常见的方法是基于比较分析目标的回波强度变化。
通过寻找回波强度最强的点,可以确定目标的位置。
同时,结合雷达的扫描方式,可以得到目标的速度和运动方向信息。
通过不断更新目标的位置、速度和方向信息,可以实现目标的跟踪。
另一种常用的目标跟踪技术是基于多普勒效应。
多普勒效应指的是当目标相对雷达运动时,雷达接收到的回波频率会发生变化。
通过分析回波频率的变化,可以推测目标的速度和运动方向,从而实现目标的跟踪。
除此之外,雷达目标跟踪还可以利用图像处理和信号处理技术。
通过对雷达回波信号进行图像化处理,可以直观地观察目标的位置和运动轨迹。
雷达目标识别技术综述
为避开需要实时地直接从含噪的目标散射数据中 提取目标的极点, 基于波形综合技术的目标识别方法 被得到广泛重视。它将接收到的目标散射信号回波与 综合出来的代表目标的特征波形进行数字卷积, 再根
〔.〕 据卷积输出的特征来判别目标。 ,2脉冲法 、 频域极 〔’#〕 大极小拟合匹配法 等, 都避开了直接提取目标极
L 雷达目标识别模型
雷达目标识别需要从目标的雷达回波中提取目标 的有关信息标志和稳定特征并判明其属性。它根据目 标的后向电磁散生的散射场的特征, 可以获 得用于目标识别的信息, 回波信号的幅值、 相位、 频率 和极化等均可被利用。对获取的目标信息进行计算机
〔"〕 大, 因而可用于目标识别。 ()** 等 详细分析了喷气
由于目标的一维距离像常会受目标之间、 目标各 散射点之间的相互干涉、 合成等交叉项的影响, 限制了
〔’$〕 识别率的提高, 因而双距离像方法被提出并 获得了
较高的识别率。为改善目标识别的性能, 可以将目标
〔’?〕 一维距离像与其它目标特征 (如极化特征 ) 相结合。
点, 减小了运算量。 !&! 基于高分辨力雷达成像的目标识别 借助高分辨力雷达对目标进行一维或二维距离成 像, 或采用合成孔径雷达或逆合成孔径雷达对目标成 像得到二维雷达图像, 可获取目标的形状结构信息。 由于一维距离像的获取相对简单, 利用一维距离 像进行目标识别的方法在 ;# 年代以后被得到广泛重 视和深入研究。基于一维距离像的目标识别方法, 在
雷达目标识别技术综述
王晓丹 王积勤 三原 !"#$%%) (空军工程大学导弹学院
!
【摘要】 针对雷达自动目标识别技术进行了简要回顾。讨论了目前理论研究和应用比较成功的 & 类目标识别方法: 基于目标运动的回波起伏和调制谱特性的目标识别方法、 基于极点分布的目标识别方法、 基于高分辨雷达成像的目标识 别方法和基于极化特征的目标识别方法, 同时讨论了应用于雷达目标识别中的 & 种模式识别技术: 统计模式识别方法、 模 糊模式识别方法、 基于模型和基于知识的模式识别方法以及神经网络模式识别方法。最后分析了问题的可能解决思路。 【关键词】 雷达, 目标识别, 特征提取, 特征分类
雷达技术综述Word版

雷达技术综述Overview of Radar Technology摘要:雷达被广泛用于军事预警、导弹制导、民航管制、地形测量、气象、航海等众多领域。
本文首先概述了雷达发展历程并总结了雷达技术发展的成因,然后对雷达的基本工作原理和基本雷达方程作了简要的介绍。
最后介绍了几种实际雷达并指出了雷达的未来发展方向。
关键词:雷达技术;工作原理;雷达应用;发展趋势Abstract:Radar is widely used in many fields of military early warning, missile guidance, aviation control, topographic surveying, meteorology, navigation and so on.This paper outlines the development process of radar and summarizes the causes of the development of radar technology,then briefly introduces the basic principle of radar and basic radar equation.Finally, introduces several kinds of practical radar and points out the future development direction of radar.Key words:radar technology; working principles; radar applications; trend in development引言雷达是英文Radar的音译,源于radio detection and ranging的缩写,原意为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2006年10月第34卷 第5期现代防御技术MODERN DEFENCE TECHNOLOGYO ct.2006V o.l34 N o.5雷达空间目标识别技术综述*马君国,付 强,肖怀铁,朱 江(国防科技大学ATR实验室,湖南 长沙 410073)摘 要:随着人类航天活动的增加,对于卫星和碎片等空间目标进行监视变得非常重要。
为了实现空间监视任务,对空间目标进行识别是非常必要的。
对空间目标的轨道特性与动力学特性进行了介绍,对雷达空间目标识别技术的研究现状和发展趋势进行了详细的综述。
关键词:空间目标识别;低分辨雷达;高分辨雷达成像中图分类号:TN957 52 文献标识码:A 文章编号:1009 086X(2006) 05 0090 05Survey of radar space target recognition technologyMA Jun guo,F U Q iang,X I AO Huai tie,Z HU Jiang(ATR L ab.,N ationa lU n i versity o f De fense T echno l ogy,Hunan Changsha410073,Ch i na)Abst ract:W ith t h e deve l o pm ent of spacefli g ht acti v ity of hum an,surveillance of space tar get such as sate llite and debris beco m es very i m portan.t In or der to i m p le m ent surveillance task,space target recogni ti o n is ver y necessary.Orb it property and dyna m ics property of space targe t are i n troduced,a deta iled sur vey is set forth about current research state and developi n g trend of radar space target recogn iti o n techno l ogy.K ey w ords:space tar get recogniti o n;lo w reso lution radar;h i g h reso lution radar i m aging1 引 言自从前苏联发射了第1颗人造地球卫星以来,卫星在预警、通信、侦察、导航定位、监视和气象等方面具有不可替代的优势。
随着人类航天活动的增加,空间碎片日益增多,对于卫星等航天器的安全造成极大的威胁,因此对于卫星和碎片等空间目标进行监视变得非常重要。
其中空间目标识别是空间监视任务中不可或缺的基本条件,空间目标识别主要是利用雷达等传感器获取空间目标的回波信号,从中提取目标的位置、速度、结构等特征信息,进而实现对空间目标的类型或属性进行识别。
2 空间目标的轨道特性与动力学特性(1)轨道特性[1,2]空间目标在轨道上的运动是无动力惯性飞行,本质上空间目标与自然天体的运动是一致的,故研究空间目标的运动可以用天体力学的方法。
空间目标在运动时受到地球引力、月球引力、太阳及其他星体引力、大气阻力和太阳光辐射压力等的作用,轨道存在摄动。
但是对轨道的实际分析表明,空间目标受到的主要力是地球引力。
假设空间目标只是受到地球引力的作用,同时假设地球是一个质量均匀分布的球体,则空间目标与地球构成二体运动系统,开*收稿日期:2005-12-15;修回日期:2006-01-23作者简介:马君国(1970-),男,吉林长春人,博士生,主要从事目标识别与信号处理研究。
通信地址:410073 湖南长沙国防科技大学ATR实验室 电话:(0731)4576401普勒三大定律和牛顿万有引力定律是研究空间目标运动轨道的基础。
在二体系统中空间目标严格按照椭圆轨道运行,地球位于椭圆的一个焦点上。
描述空间目标运动情况的6个轨道参数为:轨道倾角、升交点赤经、近地点幅角、真近点角、椭圆轨道的长半轴和椭圆轨道的偏心率。
在这6个轨道参数中,只有真近点角是时间的函数,其他轨道参数均为常数。
不同任务、不同类型的卫星所选择的轨道参数是不同的,空间碎片大都分布在人造卫星常用的轨道上[3],平均相对速度约为10km/s。
(2)动力学特性[1,2,4,5]空间目标除了受到地球引力的作用外,所受到的其他作用力统称为摄动力,摄动力包括月球引力、太阳及其他星体引力、大气阻力和太阳光压等。
不同轨道高度上的空间目标所受的摄动力大小不同,在近地轨道(轨道高度2000km以下)上运行的空间目标所受到的摄动力主要是地球的非球形引力和大气阻力;对于轨道高度300km以下的空间目标,大气阻力为主要的摄动力;对于在较高轨道上运行的空间目标,太阳和月球引力成为主要摄动力。
正常工作的卫星都具有姿态控制能力,目前姿态控制方式主要有自旋稳定姿态控制、重力梯度稳定姿态控制、磁力稳定姿态控制和3轴稳定姿态控制等,其中自旋稳定姿态控制和3轴稳定姿态控制是应用最广泛的2种姿态控制方式。
空间碎片没有姿态控制和轨道控制能力,其运动表现为不规则的翻滚运动。
3 雷达空间目标识别技术的研究现状目前,中国、美国、俄罗斯、英国、法国、德国和日本等国家都具有探测空间目标的能力,所应用的空间探测设备均为地基探测设备。
空间目标监视系统通常由光学探测设备和雷达探测设备组成,美国和俄罗斯都建立了比较完善的地基空间目标监视与跟踪系统。
美国对空间目标的监视与跟踪主要是由空间探测和跟踪系统!(SPADATS)中的观测设备来完成,空间探测和跟踪系统!本身包括空军的空间跟踪!(SPACTRACK)系统和海军的空间监视!(SP ASUR)系统。
空间探测和跟踪系统主要由相控阵雷达(包括无线电系统)和光电探测器两大类探测器组成,这两类探测器各有优点和缺点,相互补充,构成完整的空间监视体系,探测距离超过36000km。
俄罗斯在其武装力量中建立了宇宙空间监视系统!,该系统不间断地搜索宇宙空间,发现和跟踪各种军用航天器,测定卫星的轨道参数,并通过宇宙空间监视中心向俄罗斯武装力量各军种、军区发送原始信息通报,供实施空间攻防对抗使用[6]。
世界上一些雷达的探测性能如下:美国的H ay stack雷达可以检测到轨道高度1000k m、尺寸为1c m的目标,可以估计小目标(宇宙垃圾和高轨目标)的状态和特性[7]。
日本的MU(m iddle and upper at m osphere)雷达可以检测到500km轨道高度上尺寸为2c m的目标。
美国的Go ldstone雷达可以检测到1000k m轨道高度上直径为3mm的导体球,Eg lin雷达对轨道高度在3000km以内、雷达散射截面大于-35dBs m的碎片的检测概率达0 99[8]。
德国高频物理研究所(FGAN)的跟踪与成像雷达系统T I R A(track i n g and i m ag i n g radar)由一个口径34m 的抛物面天线、一个L波段窄带单脉冲跟踪雷达和一个Ku波段高分辨成像雷达组成,跟踪雷达主要用于对空间目标进行探测和跟踪,成像雷达主要完成在跟踪阶段对空间目标进行成像。
T I R A可以检测到在1000km轨道高度上、尺寸为2c m的空间目标[9]。
中国科学院陕西天文台的流星雷达理论上完全有可能观测200~1200km轨道高度范围内的尺寸大于1m的空间碎片[10]。
空间目标的结构通常具有简单、对称的特点,对于一些简单形体的空间目标如球体和圆柱体等,可以得到其雷达散射截面(RCS)随姿态角变化的解析表达式。
根据空间目标的RCS序列可以对空间目标进行识别和分类,可以对空间目标的姿态和尺寸进行估计。
1958年美国用AN/FPS-16精密跟踪雷达跟踪了俄罗斯刚刚发射的第2颗人造卫星Sput n i k II,发现其回波信号中含有与角反射器散射特性相同的周期分量,判断出卫星上装有角反射器[11]。
Tho m as J.S.建立了目标尺寸估计模型SE M,SE M反91马君国,付 强,肖怀铁,等:雷达空间目标识别技术综述现代防御技术2006年第34卷第5期映了目标的RCS与目标尺寸的关系,因此可以根据目标RCS的数值来得到空间碎片的尺寸[12]。
戴征坚根据目标RCS反射图确定柱状空间目标的结构和尺寸[3]。
日本京都大学的Tor u Sato等人根据目标RCS的起伏特征估计空间碎片的形状和尺寸[13]。
翻滚!运动是空间目标的一种特殊的运动形式,这种运动的特点是空间目标绕某一确定的空间轴翻滚,其翻滚平面保持不变。
失效卫星在地球引力和摄动力的作用下进行复杂的旋转运动,最终趋向于翻滚运动;星箭分离后的火箭末级往往演变为翻滚运动。
白广周提出了一种利用测量的翻滚目标RCS序列值对翻滚目标进行识别的方法,该方法根据测量的空间目标RCS值和坐标数据,以镜向散射点为参考点,经过坐标变换和参数估计,求得翻滚目标的姿态角,即目标轴与雷达视线之间的夹角,将该姿态角与测量的RCS数据在时间上对齐,建立目标的局部RCS方向性图,然后提取8个特征量,利用最近邻法对目标进行分类和识别[14]。
对于空间目标的RCS时间序列进行某种变换,可以得到变换特征,进而实现空间目标的识别。
卜正明把傅里叶变换同小波变换相结合,对空间目标的RCS时间序列进行功率谱估计,实现了自旋稳定卫星和3轴稳定卫星的分类识别[15]。
金胜提取RCS序列的梅林变换特征,对3种尺寸的3轴稳定卫星进行识别[16]。
根据图像可以实现空间目标分类识别,还可以获得空间目标形状、姿态和尺寸等信息。
Toru Sato 根据单距离-多普勒干涉成像技术SRD I来估计空间碎片的形状和尺寸,前提条件是要正确估计出碎片绕其主轴旋转的周期[17]。
1990年德国的跟踪与成像雷达系统T I R A成功地对前苏联礼炮-7!空间站的再入过程和物理特征进行了观测和描述,从空间站I SAR图像中得到了空间站的尺寸、形状和运动姿态等信息[2]。
将空间目标的RCS时间序列看作为一个随机过程,提取其统计特征,可以实现空间目标的识别。
戴征坚和全备提出利用非参数统计学的随机游程检验理论对空间目标的稳定方式进行判别,从而实现了对绕质心旋转和非旋转这2类目标的分类识别[2,18]。
此外,利用轨道信息也可以实现空间目标的识别,董云峰利用二进小波分析空间目标的机械能随时间的变化,根据小波系数曲线随小波分析尺度的变化趋势快速判定目标是否存在轨道机动[19]。