马潮老师:AVR应用经验
发电机avr原理

发电机avr原理发电机自励式稳压器(Automatic Voltage Regulator,简称AVR)是一种用于发电机的调压装置,它采用反馈控制方式,能够稳定输出电压,保证电力系统正常运行。
本文将介绍发电机AVR的原理和工作过程。
一、AVR的基本原理发电机AVR的基本原理是根据负载电流变化来调整励磁电流的大小,从而使输出电压保持稳定。
它通过感知输出电压与设定值之间的差异,并根据差异的方向和大小,对励磁电流进行调节。
AVR通常由功率放大器、采样电路和比较器组成。
1. 功率放大器:功率放大器是AVR的核心部分,它负责处理来自采样电路和比较器的信号,并输出相应的控制信号。
当输出电压低于设定值时,功率放大器会增大励磁电流,反之则减小。
2. 采样电路:采样电路主要用于感知输出电压的大小。
它通过电压变压器或霍尔传感器等装置,将输出电压转换成与之成正比的信号,以供比较器进行处理。
3. 比较器:比较器接收来自采样电路的信号,并将其与设定值进行比较。
当输出电压与设定值之间存在差异时,比较器将通过控制信号告知功率放大器进行调整。
二、AVR的工作过程发电机AVR的工作过程可以简单地描述为以下几个步骤:1. 采样:AVR首先对发电机输出电压进行采样,常用的方式是利用电压变压器或霍尔传感器等装置,将输出电压转换成相应的电信号。
2. 比较:采样电路将采样得到的信号与设定值进行比较。
如果输出电压低于设定值,比较器会输出一个小于零的信号;反之,如果输出电压高于设定值,比较器会输出一个大于零的信号。
3. 控制:比较器输出的信号会被功率放大器进行放大,并转化成相应的控制信号。
这些控制信号经过处理后,会改变励磁电流的大小,从而调节发电机的输出电压。
4. 反馈:调节后的励磁电流会改变发电机的磁场强度,进而影响输出电压的大小。
通过不断重复上述步骤,发电机AVR能够实现对输出电压的稳定调节。
三、AVR的应用及优势发电机AVR广泛应用于各类发电设备,特别是在需要稳定输出电压的场合中。
嵌入式培训心得体会(5篇)

嵌入式培训心得体会(5篇)首先,嵌入式系统是以应用为中心,以计算机技术为根底,且软硬件可裁减,适应应用系统对功能、牢靠性、本钱、体积、功耗有严格要求的专用计算机系统。
嵌入式有如下几个突出的有点1。
系统内核小,2专用性强,3系统精简4高实时性OS5嵌入式系统的应用程序可以没有操作系统直接在芯片上运行,6嵌入式系统需要开发工具和环境。
嵌入式系统是近几年才风行起来的,但是这个概念并非新近才消失。
从20世纪七十年月单片机(最早的单片机是Intel公司的8048,消失在1976年)的消失到今日各式各样的嵌入式微处理器,微掌握器的大规模应用,嵌入式系统已经有了近30年的进展历史。
经过30年的进展,嵌入式技术已经日趋成熟,在中国嵌入式机一般由嵌入式微处理器、外围硬件设备、嵌入式操作系统以及用户的应用程序等四个局部组成,用于实现对其他设备的掌握、监视或治理等功能。
其次,嵌入式系统无疑是当前最热门最有进展前途的IT应用领域之一。
嵌入式系统用在一些特定专用设备上,通常这些设备的硬件资源(如处理器、存储器等)特别有限,并且对本钱很敏感,有时对实时响应要求很高等。
特殊是随着消费家电的智能化,嵌入式更显重要。
嵌入式系统是软硬结合的学科,通常有两类人会去专研嵌入式:一类是学电子工程、通信工程等偏硬件专业的,另一类是学软件、计算机专业出身的人,主要从事嵌入式操作系统和应用软件的开发。
我是软件专业的学习嵌入式,越是智能设备越是简单系统,软件越起关键作用,而且这是目前的趋势。
嵌入式应用在许多方面,详细的可以分为工业掌握,交通治理,信息家电,家庭智能治理系统,POS网络及电子商务,环境工程与自然,机器人,机电产品方面应用等方面。
其中目前在效劳领域,如远程点菜器等已经表达了嵌入式系统的优势。
例外还有许多地方用到了嵌入式系统,最近飞利浦和ARM共同推出32位RISC嵌入式掌握器,适用于工业掌握,采纳最先进的0.18微米CMOS嵌入式闪存处理技术,操作电压可以低至1。
AVR之BOOTLOADER技术详解

A VR之BOOTLOADER技术详解ATmega128具备引导加载支持的用户程序自编程功能(In-System Programming by On-chipBoot Program),它提供了一个真正的由MCU本身自动下载和更新(采用读/写同时"Read-While-Write"进行的方式)程序代码的系统程序自编程更新的机制。
利用A VR的这个功能,可以实现在应用编程(IAP)以及实现系统程序的远程自动更新的应用。
IAP的本质就是,MCU可以灵活地运行一个常驻Flash的引导加载程序(Boot Loader Program),实现对用户应用程序的在线自编程更新。
引导加载程序的设计可以使用任何的可用的数据接口和相关的协议读取代码,或者从程序存储器中读取代码,然后将代码写入(编程)到Flash存储器中。
引导加载程序有能力读写整个Flash存储器,包括引导加载程序所在的引导加载区本身。
引导加载程序还可以对自身进行更新修改,甚至可以将自身删除,使系统的自编程能力消失。
引导加载程序区的大小可以由芯片的熔丝位设置,该段程序区还提供两组锁定位,以便用户选择对该段程序区的不同级别的保护。
本节将给出一个实际的的Boot Loader程序,它可以配合Windows中的超级终端程序,采用Xmodem传输协议,通过RS232接口下载更新用户的应用程序。
5.2.1 基本设计思想1.Boot Loader程序的设计要点Boot Loader程序的设计是实现IAP的关键,它必须能过通过一个通信接口,采用某种协议正确的接收数据,再将完整的数据写入到用户程序区中。
本例Boot Loader程序的设计要点有:(1)采用ATmega128的USART口实现与PC之间的简易RS232三线通信;(2)采用Xmodem通信协议完成与PC机之间的数据交换;(3)用户程序更新完成后自动转入用户程序执行;(4)Boot Loader程序采用C语言内嵌AVR汇编方式编写,阅读理解方便,可移植性强,代码小于1K字。
基于AVR的双极性SPWM调制逆变技术

u 正半 周 , 通 , 2断 , 3和 V 。 V1 V V 4交 替 通 断 , 负载 电流 比 电
主 电路 、 制 驱 动 电路 、 护 电路 以及 键 盘 显 示 电路 组 成 , 控 保 系统
和一 d 种 电平 ,o 半 周 , V U 两 u负 让 2保 持 通 , 1保 持 断 , 3和 V V V 4
交替 通 断 , 。 可 得 到一 a U 两 种 电平 。 u也 U 和 d 单 相 S WM 全桥 逆变 电路 结 构 根 据 载 波 凋制 方 式 的不 同 , P
可分 为 三 种 类 型 : 双极 性 S W M、 极 性 S WM 和 单 极 性 倍 频 P 单 P
大 系 列单 片机 中 的单 片 机 系列 之 一 , 很 高 的性 价 比 , 集 A 有 是 D、 定 时 器/ 数 器 、WM 波形 发 生 器 、E R 计 P E OM 、闪存 、 AM 等 于 R
一
体 , 能 很 强 , 要 的 外 围 电路 少 , 常 方 便 应 用 于 现 代 纯 正 功 需 非
c tol ATmega A —pu S onr l er l 6 ch r c e it s o c ev bi lr a a t r i t a hi e sc poa SP M s gme t t s n r ia in W e nai on y chOnz t moduat n O l i me h o t od. On
图 2 单 相 全 桥式 主 回路
弦 波 逆 变 器 产 品 中[ 。 1
1 总体 方案
法 , 图 2所 示 。 1和 V 如 V 2通 断 互 补 ,3和 V V 4通 断 也 互 补 。 控 其
AVR笔记
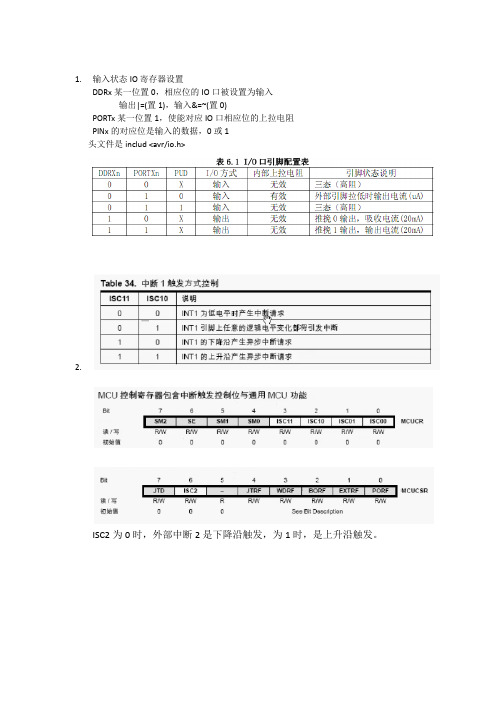
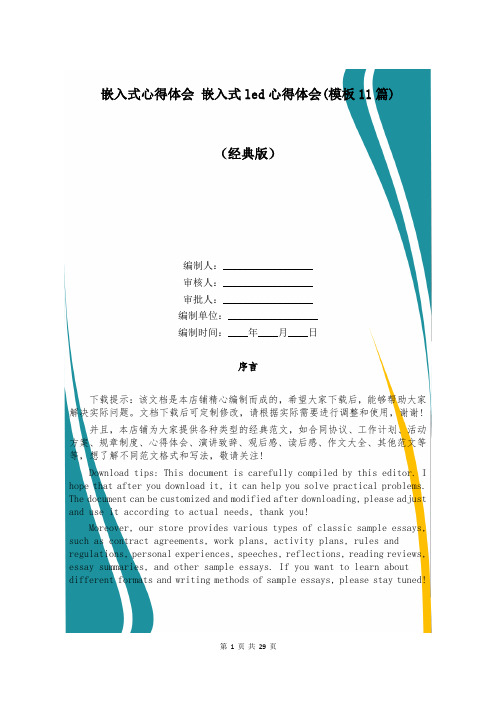
1.输入状态IO寄存器设置DDRx某一位置0,相应位的IO口被设置为输入输出|=(置1),输入&=~(置0)PORTx某一位置1,使能对应IO口相应位的上拉电阻PINx的对应位是输入的数据,0或1头文件是includ <avr/io.h>2.ISC2为0时,外部中断2是下降沿触发,为1时,是上升沿触发。
3. 4.1.2.T/C寄存器在全局变量前加volatile,这个变量才能应用在中断程序中USART 1.2.GCC编程1)另外,宏_BV(bit) 是我们操作I/O 寄存器时频繁用到的,avr-libc 建议使用这一宏进行寄存器的位操作,它在文件sfr_defs.h 中定义如下:#define _BV(bit) (1 << (bit))2)avr-libc 建议使用一组数据类型符号,这些数据类型的定义在头文件inttype.h 中,头文件的包含形式如下:#include <inttype.h>其中定义了常用的整数类型如下表所示3)const int n = 5;4)int a[n];注意:在ANSI C中,这种写法是错误的,因为数组的大小应该是个常量,而const int n,n只是一个变量(常量!= 不可变的变量,但在标准C++中,这样定义的是一个常量,这种写法是对的),实际上,根据编译过程及内存分配来看,这种用法本来就应该是合理的,只是ANSI C对数组的规定限制了它。
5)那么,在ANSI C 语言中用什么来定义常量呢?答案是enum类型和#define宏,这两个都可以用来定义常量。
6)在程序中访问 FLASH 程序存储器avr-libc 对FLASH 存储器的读写支持API 和宏在头文件pgmspace.h中定义,在源文件中的包含形式如下:#include < avr/pgmspace.h >在程序存储器内的数据定义使用关键字__attribute__((__progmem__))。
AVR综合实践,马潮老师编

;上电复位启始地址 ;转上电复位后的初始化程序执行 ;中断向量区 ;跳过中断向量区 ;取内部RAM最高地址的高位字节 ;放入SP的高位 ;取内部RAM最低地址的低位字节 ;放入SP的低位,SP中的值见器件配置文件“m16def.inc” ;置temp1(R20)为0XFF ;定义PC口为输出 ;PC口输出全“1”,LED不亮 ;设置一秒延时参数 ;值PORTC.0位为“0”,LED亮 ;调用延时子程序,延时一秒 ;值PORTC.0位为“1”,LED灭 ;调用延时子程序,延时一秒 ;循环跳转到loop继续执行
本例中的通用延时子程序仅使用了一个寄存器R16,采用二次嵌套循环,并多次利用堆 栈交换数据。其程序代码短,但能够产生长达2秒的延时(4M系统)。参照该子程序的方法, 采用三次嵌套循如,能够产生140秒的延时(使用4MHz晶振)。而采用一般的延时子程序的编
华东师范大学 电子科学技术系 马 潮 2005.4
2009290 502.323ms
9
829 207.25us
166
2412820 603.205ms
10
1060
265us
175
2819260 704.815ms
13
1999
500us
183
3216784 804.196ms
17
3937
984us
191
3650020 912.505ms
18
4564
1.14ms
i =1
i=1 j=1
式中x的值为R16的初始设置值,第一项数值11为调用子程序指令rcall、第一条压栈指 令push、最后一条出栈指令pop和子程序返回指令ret需要的机器周期数(3+2+2+4)。7x-1 为del1循环(外围循环指令)需要的机器周期数。后面两项分别为内循环del2和del3需要的 机器周期数。总的延时时间:Delay_Time = T * 0.25us。表5.1给出了几个典型的延时时间。
FreeModbus移植经验分享

FreeModbus移植经验分享一为什么要移植Freemodbus为什么要移植Freemodbus,这个问题需要从两个方面来回答。
第一,modbus是一个非常好的应用层协议,它很简洁也相对完善。
对于还没有接触过modbus的朋友来说,我非常不建议直接移植freemodbus,应该耐心的从modbus文档入手,并充分把握身边的所有资源,例如PLC的中modbus部分。
第二,其实嵌入式系统的通信协议可以自己制定,但是通过实践发现自己定制的协议漏洞百出,尤其是扩展极为困难。
我始终认为借鉴他人的经验是很好的途径。
借鉴他人成熟的代码,可以减少调试的时间,实现的功能也多了不少。
个人观点,仅供参考。
freemodbus小提示freemodbus只能使用从机功能。
freemodbus更适合嵌入式系统,虽然例子中也有WIN32的例子,如果想要做PC机程序并实现主机功能,推荐使用另一个modbus库——NMODBUS,使用C#开发。
同样WINFORM 也可以通过自己编写串口代码实现modbus功能,但是这会花费很长的时间,可能是一周也可能是一个月,如果使用现成的代码库,那么开发时间可能只有10分钟。
二freeemodbus中如何通过串口发送和接收数据freemodbus通过串口中断的方式接收和发送数据。
采用这种做法我想可以节省程序等待的时间,并且也短充分使用CPU的资源。
串口中断接收毋庸置疑,在中断服务函数中把数据保存在数组中,以便稍后处理。
但是串口发送中断使用哪种形式?串口发送中断至少有两种方式,第一种,数据寄存器空中断,只要数据寄存器为空并且中断屏蔽位置位,那么中断就会发生;第二种,发送完成中断,若数据寄存器的数据发送完成并且中断屏蔽位置位,那么中断也会发送。
我非常建议各位使用串口发送完成中断。
freemodbus多使用RS485通信中,从机要么接收要么发送,多数情况下从机处于接收状态,要有数据发送时才进入发送状态。
avr调压板工作原理

avr调压板工作原理AVR调压板是一种用于电压稳定的电子设备,它的工作原理主要通过调节电压来实现稳定输出。
下面将从原理和应用两个方面介绍AVR调压板的工作原理。
一、原理AVR调压板的工作原理基于反馈调节的原理。
它通过采集电路输出端的电压信号,并与设定的目标电压进行比较,然后根据比较结果来调整输出端的电压,使其稳定在设定的目标值附近。
具体来说,AVR调压板一般由电压采集电路、比较电路、控制电路和输出电路等组成。
1. 电压采集电路:负责采集电路输出端的电压信号。
一般采用分压电路将输出电压降低到适合芯片工作的范围,然后通过模拟转数字转换器(ADC)将电压信号转换为数字信号。
2. 比较电路:将采集到的电压信号与设定的目标电压进行比较。
比较电路一般采用运算放大器等元件,通过放大和滤波等处理,得到稳定的比较结果。
3. 控制电路:根据比较结果来调整输出端的电压。
控制电路一般由微处理器或专用的控制芯片实现,它通过输出控制信号来调节输出电压。
控制电路通常还包括反馈回路,用于实现闭环控制,提高稳定性和响应速度。
4. 输出电路:负责输出稳定的电压。
输出电路一般采用功率放大器来提供足够的电流和功率,以满足实际应用的需求。
二、应用AVR调压板广泛应用于各种需要稳定电压的场合。
以下是一些常见的应用场景:1. 电源稳压:AVR调压板可以用于电源稳压,保证电源输出的稳定性。
在电子设备中,电压波动可能会对电路元件和芯片造成损害,因此使用AVR调压板可以有效保护设备。
2. 充电器:AVR调压板可以用于充电器中,确保输出的充电电压稳定。
在充电过程中,电池的电压会发生变化,如果充电电压不稳定,可能会对电池造成损害。
3. 电动机控制:在一些需要精确控制电动机转速的应用中,AVR调压板可以用于提供稳定的电压给电机驱动器,确保电机运行的稳定性和精确性。
4. 通信设备:在通信设备中,AVR调压板可以用于保证电路的供电稳定,提高通信信号的质量和可靠性。
基于AVR单片机的超声波测距在倒车防撞中的应用①

基于AVR单片机的超声波测距在倒车防撞中的应用①作者:黄丹杨育霞耿瑞华杨超伟孙露来源:《科技创新导报》2011年第20期摘要:以AVR单片机ATmega16作为主控制器,结合超声波发射、接收模块DYP-ME007,巧妙地利用AVR单片机特有的输入信号捕捉功能,实现3cm~3.5m的非接触式距离感测,并实时显示距离和报警。
分析了DYP-ME007模块的超声波测距原理,给出了测距系统的整体设计和硬件组成结构图,并具体阐述了系统软件设计过程并提供了程序框图。
经实际测试证明本系统实现了超声波测距和报警功能。
关键词:AVR单片机超声波测距倒车防撞中图分类号:U463 文献标识码:A 文章编号:1674-098X(2011)07(b)-0113-011 引言据相关调查统计,15%的汽车撞车事故都是因倒车时汽车的后视能力不良造成的。
因此,增加汽车的后视能力显得尤为重要。
安全避免障碍物的前提是快速准确地测量障碍物与汽车之间的距离。
为此,本设计基于AVR单片机,利用超声波实现了无接触测距的倒车雷达系统。
可以快速准确地测量障碍物与汽车之间的距离,帮助驾驶员扫除视野的死角和视线模糊的缺陷,使驾驶员的倒车操作更加安全有效。
2 系统整体设计本设计采用以AVR单片机ATmega16[1][2]为核心,用超声波发射、接收模块DYP-ME007进行测距,用4位数码管实时显示所测的距离,配合其他硬件电路和软件设计方法来实现。
Atmega16采用CMOS技术和RISC构架,具有高速、低功耗等优势,而且具有定时器输入捕捉模式。
本文充分利用这些优势,配合实现了快速准确测距功能。
本系统的单片机采用4MHz计数时钟。
测距开始时由PD.7(OC2)引脚向DYP-ME007模块发出发射超声波测距触发信号,DYP-ME007模块内部将检测回波,一旦检测到有回波信号则输出回响信号送到单片机的PD.6(ICP1)引脚。
单片机对接收到的回响信号进行输入捕捉并测算出从超声波信号发射到单片机接受到反射信号所花费的时间t值, 经处理后计算出被测距离s并送数码管显示和报警。
AVR单片机的高音质WAV播放器设计

P WM 接 1 3 ' 滤 波输 出。 经过 测 试 . 系统 能 流 畅 地 播 放 采 样 率 在 8 k Hz ~4 8 k Hz 之 间 的 W AV 音 频 文 件 。
关键词 : I 、 MF( A1 6 M CU; F A r F S文件 系统 ; W AV; F 1 F ( ) ; P W M
l i n e o f o n e h i p r c S OU r c e s 。 s u c h a s t l l e t i me r s. t he SPI i nt e r f a c e, t hc PW M a n d s o e l 1 . The da t a of SD c a r d i s F e l L { 1 I } m m gh t l l e SPI i nt 【 . I - hr 。 . The I ) At 、ou l put i s I ) a s e d on PW M . I n or de r t o pr e ve n t d a t a s t r e am on b r e a kp o i n t . t he da t a s t o r e d i n t he buf f ( - r i s h a ndl e d( , s i n g FI F() . T1 / (
AVR的指令与汇编系统 马潮课件

第3章AVR的指令与汇编系统传统的8位单片机(如最典型的8051结构的单片机)大都采用复杂指令CISC(Complex Instruction Set Computer)系统体系。
由于CISC结构存在指令系统不等长,指令数多,CPU利用效率低,执行速度慢等缺陷,已不能满足和适应设计高档电子产品和嵌入式系统应用的需要。
作为8位的AVR单片机来讲,除了其具备比较完善和功能强大的硬件结构和组成外,其更重要的是它的内核和指令系统为先进的RISC体系结构,采用了大型快速存取寄存器组(32个通用工作寄存器)、快速的单周期指令系统以及单级流水线等先进技术。
因此,AVR 内核核指令系统的显著特点有:1.16/32位定长指令AVR的一个指令字为16位或32位,其中大部分的指令为16位。
采用定长指令,不仅使取指操作简单,提高了取指令的速度;同时也降低了在取指操作过程中的错误,提高了系统的可靠性。
2.流水线操作AVR采用流水线技术,在前一条指令执行的时候,就取出现行的指令,然后以一个周期执行指令。
大大提高了CPU的运行速度。
3.大型快速存取寄存器组传统的基于累加器的结构单片机(如8051),需要大量的程序代码来完成和实现在累加器和存储器之间的数据传送。
而在AVR单片机中,采用32个通用工作寄存器构成大型快速存取寄存器组,用32个通用工作寄存器代替了累加器(相当有32个累加器),从而避免了传统结构中累加器和存储器之间数据传送造成的瓶颈现象。
由于AVR单片机采用RISC结构,使得它具有高达1MIPS/MHz的高速运行处理能力。
同时也能更好地适合采用高级语言(例如C语言、BASIC语言)来编写系统程序,高效地开发出目标代码,以加快产品进入市场的时间和简化系统的设计、开发、维护和支持。
3.1ATmega16指令综述指令是CPU用于控制各功能部件完成某一指定动作或操作的指示和命令。
指令不同,CPU和各个功能部件完成的动作也不一样,指令的功能也不同。
嵌入式心得体会 嵌入式led心得体会(模板11篇)
嵌入式心得体会嵌入式led心得体会(模板11篇)(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如合同协议、工作计划、活动方案、规章制度、心得体会、演讲致辞、观后感、读后感、作文大全、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, our store provides various types of classic sample essays, such as contract agreements, work plans, activity plans, rules and regulations, personal experiences, speeches, reflections, reading reviews, essay summaries, and other sample essays. If you want to learn about different formats and writing methods of sample essays, please stay tuned!嵌入式心得体会嵌入式led心得体会(模板11篇)当我们经历一段特殊的时刻,或者完成一项重要的任务时,我们会通过反思和总结来获取心得体会。
关于AVR的熔丝的使用和设置

芯 片 擦 除 命 令 并 不 改 变其 它 熔 丝 位 的 状 态 。 6 正 确 的 操 作 程 序 是 : 芯 片 无 锁 定 状 态 下 , 栽 运 行 代 、 在 下
码 和 数 据 , 置 相 关 的 熔 丝 位 , 后 配 置 芯 片 的 锁 定 位 。芯 片 被 配 最
不 会 使 用和 误 操 作 , 地 给 出 参 考 。 对 特
同 时 。 正 版 智 能 卡 中 。“ 丝 ”也 作 为 一 种 保 证 单 片 机 ・ 在 熔 安 全 性 。 止 程 序 被 非 法 读 出 而 导 致 芯 片 被 破 解 的 手 段 存 在 一 防
着 。因此 。 解 芯 片 的熔 丝加 密 位 也就 成 为 7黑 客攻 击 智能 破
易 掌 握 。 下 面 给 出对 A R 熔 丝 位 的 配 置 操 作 时 的 一 些要 点 和 V 需要 注 意 的 相 关 事 项 。
1 在 A R 的 器 件 手 册 中 . 对 熔 丝 住 使 用 已 编 程 、 V
( rg a P o r mme ) 未 编 程 ( n rg a d 和 U p o r mme 定 义 熔 丝 住 的 状 d)
’
・ ・
一
- ● ’
1 -
.
.
-
-
t
-
・
’
,
,
●
-
●
-
,
,
t
-
,
,
-
.
t
-
.
・ .
’
-
’
’
-
.
关 于 AV 的 熔 丝 的 使 用 和 设 置 R
看 到 这 么 多 的 人 对 AVR 的 熔 丝 位
马潮老师编著--第9章 键盘输入接口与状态机编程

图 9-2 简单按键输入电路图
根据按键连接电路可知,按键状态的确认就是判别按键是否闭合,反映在输入口的电平
就是和ห้องสมุดไป่ตู้键相连的 I/O 引脚呈现出高电平或低电平。如果输入高电平表示断开的话,那么低
华东师范大学 电子系 马 潮 9-3
第 9 章 键盘输入接口与状态机编程
按键 K1 是一种经济的接法,它充分利用了 AVR 单片机 I/O 口的内部上拉特点。在 K1 的连接中,除了把 PC5 定义为输入方式时(DDRC.5=0),同时设置 PC5 口的上拉电阻有效 (PORTC.5=1),这样当 K1 处在断开状态时,PC5 引脚在内部上拉电阻的作用下为稳定的高电 平(如果上拉电阻无效,则 PC5 处在高阻输入态,PC5 的输入易受到干扰,不稳定),按下 K1 输入为低电平。与 K2 连接方式比较,K1 连接电路中省掉了一个外部上拉电阻,而在 K2 的连接方法中,由于外部使用了上拉电阻,所以只要设置 PC6 口为输入方式即可,该口内部 的上拉电阻有效与否则不必考虑了。电阻 R1 不仅起到上拉的作用,还有限流的作用,通常 在 5K-50K 之间。
9.2 按键输入接口设计
在单片机嵌入式系统中,按键和键盘是一个基本和常用的接口,它是构成人机对话通道 的一种常用的方式。按键和键盘能实现向嵌入式系统输入数据、传输命令等功能,是人工干 预、设置和控制系统运行的主要手段。
9.2.1 简单的按键输入硬件接口与分析
键盘是由一组按键组合构成的,所以我们先讨论简单的单个按键的输入。 图 9-2 是简单按键输入接口硬件连接电路图,图中单片机的三个 I/O 口 PC7、PC6、PC5 作为输入口(输入方式),分别与 K3、K2、K1 三个按键连接。其中 K2 是标准的连接方式, 当没有按下 K2 时,PC6 的输入为高电平,按下 K2 输入为低电平。PC6 引脚上的电平值反映 了按键的状态。
马朝老师的AVR

19.1.2 WAVE 数字音频文件格式
WAVE 格式的文件(扩展名为 wav)是多媒体数字音频中使用的基本音频文件格式之一, 它是以 RIFF 格式为标准的。RIFF 是英文 Resource Interchange File Format 的缩写,每 个 WAVE 文件的头四个字节便是“RIFF”。 WAVE 文件是由若干个 Chunk(块)组成的。按照在文件中通常出现的位置包括有:RIFF WAVE Chunk, Format Chunk, Fact Chunk(可选), Data Chunk,LIST Chunk(可选)等。其中 除了 RIFF WAVE Chunk, Format Chunk, Data Chunk 是必须的以外,其它是可选的,具体见 表 19-2。 RIFF WAVE Chunk ID = 'RIFF' RiffType = 'WAVE' Format Chunk ID = 'fmt ' Fact Chunk(optional) ID = 'fact' Data Chunk ID = 'data' LIST Chunk(optional) ID = 'LIST'
表 19-10
含 义 RIFF Chunk ID RIFF Chunk Size WAVE 标识字 fmt Chunk ID fmt Chunk Size 编码方式 声道数目 采样频率
说
明
文件总长度为 14789 + 8 个字节 (14789 = 0x000039CE) ID 为 4 字节 fmt 18 个字节 0001 为无压缩的 PCM 格式 单声道 8000Hz (8000 = 0x00001F40)
嵌入式培训心得体会

嵌入式培训心得体会嵌入式培训心得体会1学期开始,我们开始学习《嵌入式系统及应用》,由于初次接触嵌入式系统,感觉蛮难的,所以收获不是很大,很多的概念都比较模糊,等到学期结束开始做嵌入式课程设计时,真是茫然无从下手,自从拿到设计主题后,我就像热锅上的蚂蚁,一个字“急”。
最后实在没有办法,逼着自己去学习,查资料,总算对嵌入式有了浅层理解。
嵌入式系统本身是一个相对模糊的定义,一个手持的MP3和一个PC104的微型工业控制计算机都可以认为是嵌入式系统。
总体来说,嵌入式系统是“用于控制,监视或者辅助操作机器和设备的装备”。
一个典型的桌面Linux系统包括3个主要的软件层---linux内核、C库和应用程序代码。
内核是唯一可以完全控制硬件的层,内核驱动程序代表应用程序与硬件之间进行会话。
内核之上是C库,负责把POSIX API转换为内核可以识别的形式,然后调用内核,从应用程序向内核传递参数。
应用程序依靠驱动内核来完成特定的任务。
在了解了基础知识之后,我开始进行上机操作,当然,其中遇到很多的难题,很多东西都是第一次接触,又没有别人在旁边指导操作,完全凭借自己去摸索练习。
其中的困难可想而知。
然而坚持就是胜利,牙一咬眼一闭坚持做下去,而通过本次实验,我感觉收获还是蛮多的可能我对于嵌入式的知识学习的还是不太多,但是这之外的东西收获颇丰。
它让我学会了如何通过自己的努力去认知一个新事物,更重要的是端正自己的学习态度,只有真正下功夫去学习,才能有收获,正所谓“一份耕耘,一份收获。
”没有付出,何谈回报呢?再者,通过本次实验,我也学会了如何去分析问题,如何找出自己设计中的不足,继而去排除解决问题,这就是一个自我学习的过程。
当我们通过实验去学习理论知识时,自己动手得出的结论,不仅能加深我们对嵌入式的理解,更能加深我们对此的记忆。
当然,在这其中,我也发现自己的许多不足之处,由于学期伊始我没有好好学习,才落到如此地步,这也可以说是一个教训吧!我相信在以后的学习工作中,我一定会端正自己的学习态度,一丝不苟的去对待每一件事。
AVR单片机嵌入式系统原理与应用——马潮(著)第02章

第二章 AVR单片机的基本组成单片机是构成单片机嵌入式系统的核心器件。
本章首先将介绍一般单片机的基本组成和结构,使大家对单片机片内的硬件有基本了解和认识。
掌握了单片机的基本结构和组成,对学习、了解任何一种类型单片机的工作原理,编写单片机的系统软件以及和设计外围电路都是非常重要的。
作为一个实例,本章重点以新型的,采用RISC指令的AVR高速单片机作为主要介绍对象,以本书中主要讲解和使用的一款AVR单片机ATmega16为主线,详细介绍AVR单片机的基本结构和系统构成。
§2.1 单片机的基本组成2.1.1 单片机的基本组成结构单片机嵌入式系统的核心部件是单片机,其结构特征是将组成计算机的基本部件集成在一块晶体芯片上,构成一片具有特定功能的单芯片计算机—单片机。
一片典型单片机芯片内部的基本组成结构如图2-1所示。
外部中断外部数据/地址总线图2-1 典型单片机的基本组成结构从单片机的基本组成可以看出,在一片(单片机)芯片中,集成了构成一个计算机系统的最基本的单元:如CPU、程序(指令)存储器、数据存储器、各种类型的输入/输出接口等。
CPU同各基本单元通过芯片内的内部总线(包括数据总线、地址总线和控制总线)连接。
一般情况下,内部总线中的数据总线宽度(或指CPU的字长)也是标定该单片机等级的一个重要指标。
一般讲,低档单片机的内部数据总线宽度为4位(4位机),普通和中档单片机的内部数据总线宽度一般为8位(8位机),高档单片机内部数据总线宽度为16或32位。
内部数据总线宽度越宽,单片机的处理速度也相应的提高,功能也越强。
2.1.2 单片机基本单元与作用下面分别对单片机芯片中所集成的各个组成部分予以简要介绍。
1.MCU单元MCU单元部分包括了CPU、时钟系统、复位、总线控制逻辑等电路。
CPU是按照面向测控对象、嵌入式应用的要求设计的,其功能有进行算术、逻辑、比较等运算和操作,并将结果和状态信息与存储器以及状态寄存器进行交换(读/写)。
AVR单片机的串行通信

whl () i e 1 {
Trn mi ip taa ; a s t( ud t) n
送 ;读寄存器时将读取移位寄存 器接收缓 冲区的值 。
};
}
3 实例 分析
现 将 A 9 S 5 5与 A 9 S 4 4两 个 系 统 相 连来 进 行 数 据 T 0 83 T043
口也 同样 允 许 在 A m g 列 单 片 机 和 外 设 或 其 他 A R 系 列 T ea系 V
单片机之 间高速 同步数据传输 。A 9 T 0系列 S I P 特征如下 :
()采 用 全 双 T 模式 ,3线 同步 进 行 数据 传 输 。 1 () 可 以 当作 主 机或 从 机 上 作 。 2 () 可 配 置 为 MS 3 B方 式 或 L B方 式 。 S
Ke r s VR sn l — h p; P S r l o y wo d :A ig e c i S I; e a mmu ia in i c nc t o
l 前 言
A R单 片 机 是 由美 国 A M E V T L公 司 19 年 开 始 逐 步设 计 97
SI P 既可 以工作在 主模式下 ,也可 以 : 【 作在从模式下。当工作 在主模式下 时 ,每发送 或接收一位数 据 ,都需 要一次 时钟作 用 ;而 当工作 在从模式下 时 ,每次接 收到时钟信 号之后 才进 行一位数据 的发送或接 收。S I P 主机— —从机的互联如 图, 1所 示, 系统包括两个移位寄存器和一个主机时钟发 生器 。将 需要 的从机 的 s s引脚拉低 ,从而使主机启动一次通信过程 。主机 和 从机 将需 要 发送 的数 据放 入 相应 的移 位 寄存 器 。主 机在
S K 引 脚 上 产 生 时 钟 脉 冲 以 交 换 数 据 。 S K引 脚 是 主 机 模 式 C C 时 的时 钟 输 出 以及 从 机 模 式 的 时钟 输 入 。 主 机 数 据 从 主 机 的 MO I 出 , 由从 机 的 MO I 人 ; 从 机 数 据 由从 机 MIO 移 S移 S移 S 出 , 由主机 的 M S 移入 。 主 机通 过将 从 机 的 S IO s拉 高实 现 与
基于AVR多功能报警系统的温湿度模块的设计

正常工作 , 时监控 温度 、湿度 、可 燃气体 以及是否 有 实 异 常红外 线的侵入 。通 过高精度 的数据 采集 , 现报警 实 功能, 报警 电路可有声效 报警 及 L D 闪烁 报警 。采用 液 E 晶界 面 L Dl 0 C 6 2显示 , 同时可 以扩展 功 。系统整 体
Abs r c :I r e o a h e e t e m u t—u c i a o l r s s e . h e i n o o to l g m o u e u h a e t a t n o d rt c i v h lif n t on l me a a m y t m t e d sg fc n r li d l s s c st mp r t r n h n eau ea d h mi i y t e A u d t b h VR e 6 m i r c n r l ra h o e wi h CD i p a ss u i d I plyst e r l fr a —i y M ga c o o o l s t e c r t t e L I t e h d s l y i t d e . t a h o e o e ltme a a m n t rn , n k st e s s e c mplt h e a l r q ie n s Af rt e h r wa e a d s fwa e d b g i g. l r mo i i g a d ma e h y t m o o e e t ed f u t e u r me t. t a d r n o t r e u g n , e h t e r s ls s o t a h yse c n wo k s c e s u l , e i t r a e i o d t e f n to s c n b x e d d. n h h e u t h w h t e s t m a r u c s f ly. n e f c s g o , h u c i n a e e t n e , d t e t h t a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AVR 应用经验
作者:马潮老师 /整理:armok / 2005-01-17/
AVR与传统类型的单片机相比,除了必须能实现原来的一些基本的功能,其在结构体系、功能部件、性能和可靠性等多方面有很大的提高和改善。
但使用更好的器件只是为设计实现一个好的系统创造了一个好的基础和可能性,如果还采用和沿袭以前传统的硬件和软件设计思想和方法的话,是不能用好AVR的,甚至也不能真正的了解AVR的特点和长处。
功能越好的器件,需要具备更高技术和能力的人来使用和驾驭它。
就象一部好的F1赛车,只有具备高超技术的驾驶员才能充分体会到车的特点,并能最大限度的发挥出车的性能。
AVR具有上手入门快,开发方便简单的特点,但要充分体会和发挥AVR的优点,还需要应用工程师本身的硬软件设计开发能力的不断学习、实践提高。
“外行看热闹,内行看门道”,对于有一定基础的嵌入式和单片机系统设计开发的工程师,不妨先简单尝试一下AVR。
开发环境与工具:PC+下载线+实际的系统板
PC上的开发软件:
AVR Studio(Free)汇编+汇编调试+高级语言调试+软件仿真
ICC、CVAVR、BASCOM-AVR 高级语言程序开发+程序下载。
其中一个购买正版全功能,作为主要的开发环境,其它使用DEMO版,作为辅助及参考。
AVR ISP下载线:
STK200 and STK200+ and STK300 ISP programmer。
通过PC的打印机口,采用ISP技术将系统运行代码(HEX、BIN)和数据写入AVR芯片的Flash和EEProm中,编程AVR的配置熔丝位和加密位。
支持决大多数的AVR芯片、以及ATMEL的51兼容芯片89S8252、89S52等。
在ICC、CVAVR、BASCOM-AVR、BASCOM-8051中都内含对该下载线的支持程序。
免费专用的下载程序:SLISP、PonyProg2000等。
尽量不使用仿真器的建议:
在开发和调试系统程序时,有许多人完全依赖于仿真器,一旦离开了仿真器时就感觉无从下手。
其实,由于AVR的Flash存贮器可方便的使用ISP技术在线的多次擦写,因此建议尽量不使用(依赖)仿真器来开发和调试程序。
在实际开发过程中,程序的调试可以从下几方面入手:
现在的高级语言编译器(如C编译器)可以产生效率很高的机器代码,因此建议大家尽量使用高级语言编写系统程序。
使用Atmel公司提供AVR Studio软件模拟仿真环境,以及其他的软件模拟仿真环境(BASCOM-AVR)。
尽可能使用高级语言编写系统程序。
利用目标板上的LED、LCD或异步串口。
见附件“没有仿真器的情况下如何开发AVR”的介绍。
提高硬件设计的合理性:
尽量合理和充分使用AVR片内的资源,如EEPROM、A/D、内部的RC振荡源。
尽量采用串口通信连接的外围器件,大容量的存储器、LCD控制器、打印机、不用8279(LED数码管+键盘)而使用7279等。
除了必须外扩RAM(如语音和图象),一般不提倡使用并行扩展(573+译码电路),减小硬件和连线以及PCB板上错误的出现概率,同时也提高了系统的可靠性。
并行扩展向串行扩展是发展趋势。
现在有大量的新的外围器件采用高速的串行接口,如A/D、D/A、RTC、存储器等。
尽量使用以及在目标板上预留ISP程序下载接口,或使用IAP技术。
优点:ISP接口与I/O的兼容性比JETAG好。
缺点:不能在线调试
注意和掌握AVR配置熔丝位的使用:
.系统晶振的选择
.BOD的使用
.启动延时
.Mega8的PC6引脚,RESET与通用I/O的转换
.JETAG接口和通用I/O的转换
.启动向量的转换,BOOT-LOAT区大小的设置
提高硬件可靠性的考虑:
.尽量采用片内晶体、采用低频率的系统时钟、振荡电路的输出小幅度。
.选择合适的启动延时参数
.使用BOD、片内的看门狗
.合理休眠方式的使用
.不用I/O口设定输出低电平
.利用内部的EEProm和寄存器MCUCSR判断复位标志,进行不同的处理
提高软件设计的能力和水平:
尽量合理采用高级语言设计编写系统程序。
有许多人认为使用汇编写程序比较精简,而用高级语言开发会浪费很多程序空间,其实这是一种误解。
对一个有经验的,而且非常熟悉某种单片机的汇编高手而言,他是能写出比高级语言更精简的代码。
而对汇编不是很熟的开发者、或突然更换了一种新的单片机,您能保证一定可以写出比高级语言更简练的代码吗?
高级语言的优越性是汇编语言不能比的:
.程序移植方便
.程序的坚固性
.数学运算的支持
.条理清晰的结构化编程,程序的可维护性。
.可协同开发软件,开发周期短。
现在的高级语言编译器(如C编译器)已可以产生代码效率很高的机器代码,因此建议大家能用高级语言实现的程序尽可能使用高级语言写,在对速度和时序要求特严的场合可以采用混合编程的方法来解决。
更深入和全面的掌握各种串行通信协议的规程:
嵌入式系统目前以大量的使用串行接口外围芯片和各种通信接口,如RS232、两线(I2C)、三线(SPI)、单总线、USB、CAN、TCP/IP等。
开发人员和程序员应了解低层协议,熟悉硬件怎样和如何实现低层协议,如何定义可靠的上层应用协议,以及低层协议驱动同上层应用协议之间的接口设计(中间层软件的实现)等。
硬件工程师的软件编写能力要提高,采用标准程序编写方式、完善的软件整体框架的设计、良好的数据结构和程序结构系统。
(计算机软件专业的程序设计员对硬件不熟悉、大部分是在操作系统支持下编写软件,对低层接口和协议的驱动层以及接口也不了解,往往也编写不出好的单片机系统程序。
)
通信接口的编写应尽量
.采用中断+缓冲区,
.分层+结构化设计,
.尽量不使用轮循方式(降低AVR的效率)。
参见URAT(RS232)驱动+中间层软件示例。
采用好的系统设计模式:
尽量不使用传统的前后台(中断)系统设计模式,任务之间相互影响和干扰,无法定时操作。
如设计一个采用动态扫描方式驱动的8位LED数码管显示+动态扫描的4*4矩阵键盘。
采用TimeTip+状态机设计+CASE结构,实现多任务并行运行系统设计方法。
或时间触发式的系统设计。
(见:《时间触发嵌入式系统设计模式》中国电力出版社 2004.6)
移植小型嵌入式操作系统,如UCOS-II。
在网上有些免费的基于AVR的简洁的操作系统。
提高C语言的编程能力和软件应用水平:
熟悉和用好C中的数据结构体、指针应用、内存管理等较高级的应用。
熟悉和了解你所使用的高级语言开发平台的特点。
这些平台是针对某一类处理器的,包含许多特殊的不兼容的语句和扩展的结构、语句、函数等。
尽管使用方便,但由于其不透明性和时间的不确定性,因此要合理使用。
如C中的getchar()、putchar()等。
AVR有多个开发平台,每个都有其特点和不足。
能够综合使用这些平台,相互互补,能够提高开发效率。
如通过ICC、CVAVR的程序生成器CodeWizard学习和了解AVR的硬件设置,简化计算,快速的生成程序基本模块,如“一个URAT(RS232)低层驱动+中间层软件示例”。
我的使用经验:
.简单系统的开发使用BASCOM-AVR;
.复杂系统开发以ICC或CVAVR为主;其它配合;
.烧写AVR的配置熔丝位使用BASCOM-AVR;。