控制字格式
微机原理试卷及参考答案3
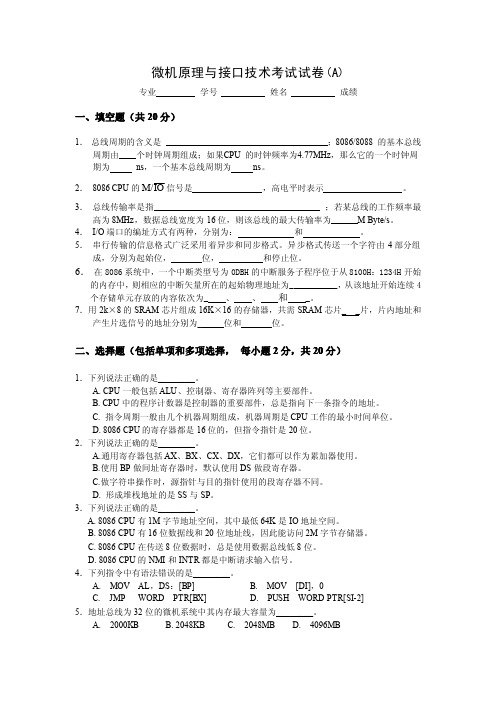
微机原理与接口技术考试试卷(A)专业学号姓名成绩一、填空题(共20分)1.总线周期的含义是;8086/8088的基本总线周期由个时钟周期组成;如果CPU的时钟频率为4.77MHz,那么它的一个时钟周期为ns,一个基本总线周期为ns。
2.8086CPU的M/IO信号是,高电平时表示。
3.总线传输率是指;若某总线的工作频率最高为8MHz,数据总线宽度为16位,则该总线的最大传输率为M Byte/s。
4.I/O端口的编址方式有两种,分别为:和。
5.串行传输的信息格式广泛采用着异步和同步格式。
异步格式传送一个字符由4部分组成,分别为起始位,位,和停止位。
6.在8086系统中,一个中断类型号为0DBH的中断服务子程序位于从8100H:1234H开始的内存中,则相应的中断矢量所在的起始物理地址为__,从该地址开始连续4个存储单元存放的内容依次为_、、和_。
7.用2k×8的SRAM芯片组成16K×16的存储器,共需SRAM芯片__片,片内地址和产生片选信号的地址分别为_位和_位。
二、选择题(包括单项和多项选择,每小题2分,共20分)1.下列说法正确的是____。
A.CPU一般包括ALU、控制器、寄存器阵列等主要部件。
B.CPU中的程序计数器是控制器的重要部件,总是指向下一条指令的地址。
C.指令周期一般由几个机器周期组成,机器周期是CPU工作的最小时间单位。
D.8086CPU的寄存器都是16位的,但指令指针是20位。
2.下列说法正确的是____。
A.通用寄存器包括AX、BX、CX、DX,它们都可以作为累加器使用。
B.使用BP做间址寄存器时,默认使用DS做段寄存器。
C.做字符串操作时,源指针与目的指针使用的段寄存器不同。
D.形成堆栈地址的是SS与SP。
3.下列说法正确的是____。
A.8086CPU有1M字节地址空间,其中最低64K是IO地址空间。
B.8086CPU有16位数据线和20位地址线,因此能访问2M字节存储器。
CDT规约分析篇

一、CDT规约1.CDT规约的传送内容a.遥信b.遥测c.事件顺序记录(SOE)d.电能脉冲记数值e.遥控命令;f.设定命令;g.升降命令;h.对时;i.广播命令;j.复归命令;k.子站工作状态。
2.CDT规约帧结构同步字目前有两种,分别是:a.EB 90 EB 90 EB 90b.D7 09 D7 09 D7 09控制字因传送内容、传送方向不同而意义有所不同。
在我们调试过程中,一般是通过我公司的通信管理器向对方调度发送遥信、遥测、SOE、电度报文等。
这里就我们称调度侧为主站,变电站侧为子站。
当子站向主站发送信息时称为上行,当主站向子站发送信息称为下行。
71 61 05 01 01 92(重要遥测报文帧的控制字)其中:71 是控制字节61 是帧类别,表示该帧传送的是重要遥测帧05 是信息字数,表示一共发送了5组重要遥测,每组两个遥测量。
01 是源站地址,在实际使用中一般是发送的一方,如通信管理器向调度发送报文01 是目的地址,在实际使用中一般是接收的一方,如通信管理器接收直流屏的报文92 是校验码信息字用来表示传送的相关量的状态和数值。
CDT报文的具体格式请参加附件。
3.实际报文举例EB 90 EB 90 EB 90 ------------同步字71 61 05 01 01 92 ------------控制字,5组重要遥测,低位在前,高位在后00 00 00 74 00 09 ------------信息字1,第一组遥测,码值为0000,007401 6F 28 01 28 C5 -----------信息字2,第二组遥测,码值为286F,280102 56 28 DC 00 E7 -----------信息字3,第三组遥测,码值为2856,00DC03 60 00 00 00 0C ------------信息字4,第四组遥测,码值为0060,000004 00 00 00 00 70 -------------信息字5,第五组遥测,码值为0000,0000同理:EB 90 EB 90 EB 90 ------------同步字,低位在前,高位在后71 F4 01 01 01 21 ------------控制字,一组遥信,32个遥信量71 C2 04 01 01 35 ---------------次要遥测00 00 00 00 00 37 ---------------第一组遥测01 00 00 00 00 55 ---------------第二组遥测02 00 00 00 00 F3 ---------------第三组遥测03 00 00 00 00 91 ----------------第四组遥测EB 90 EB 90 EB 90---------------同步字71 B3 04 01 01 35 ---------------一般遥测00 00 00 00 00 37 ---------------第一组遥测01 00 00 00 00 55 ---------------第二组遥测02 00 00 00 00 F3 ---------------第三组遥测03 00 00 00 00 91 ----------------第四组遥测EB 90 EB 90 EB 90 ----------------同步字71 85 04 01 01 C5 ---------------电能脉冲A0 00 00 00 00 0C ----------------第一路脉冲A1 00 00 00 00 6E ----------------第二路脉冲A2 00 00 00 00 C8 ----------------第三路脉冲A3 00 00 00 00 AA ----------------第四路脉冲以下为下行报文,请注意比较其与上行报文的不同之处:EB 90 EB 90 EB 90 ----------------同步字71 61 03 01 01 EF -----------------遥控选择E0 33 00 33 00 91 ----------------对0号开关进行遥控分操作,连发3遍E0 33 00 33 00 91 ----------------33表示是遥控分E0 33 00 33 00 91 ----------------00表示是0号开关EB 90 EB 90 EB 90 -----------------同步字71 B3 03 01 01 0E -----------------遥控撤消E3 55 00 55 00 9d -----------------对0号开关的遥控分操作撤消,连发3遍E3 55 00 55 00 9d -----------------55表示遥控撤消E3 55 00 55 00 9dEB 90 EB 90 EB 90 ------------------同步字71 61 03 01 01 EF ------------------遥控选择E0 CC 00 CC 00 97 -------------------对0号开关进行遥控合操作,连发3遍E0 CC 00 CC 00 97 -------------------CC表示遥控合E0 CC 00 CC 00 97EB 90 EB 90 EB 90 -------------------同步字71 F4 03 01 01 F7 -------------------遥调升选择E4 CC 00 CC 00 18 -------------------对0号设备进行遥调升操作,连发3遍E4 CC 00 CC 00 18 -------------------CC表示遥调升E4 CC 00 CC 00 18EB 90 EB 90 EB 90 -------------------同步字71 26 03 01 01 16 -------------------遥调升撤消E7 55 00 55 00 12 -------------------对0号设备的遥调升操作撤消,连发3遍E7 55 00 55 00 12 -------------------55表示遥调升E7 55 00 55 00 12EB 90 EB 90 EB 90 ------------------同步字71 7A 02 01 01 69 ------------------对时报文EE 03 00 12 22 3F -----------------34分18秒0003毫秒EF 13 19 09 06 9E -----------------2006年09月25日19时EB 90 EB 90 EB 90 ------------------同步字71 57 03 01 01 32 ------------------设置某个数值E8 C3 00 17 00 71 ------------------将0号数据设定为23,连发3遍E8 C3 00 17 00 71 ------------------00表示选择的数据,17为设定后的数值E8 C3 00 17 00 71EB 90 EB 90 EB 90 ------------------广播命令21 9E 00 01 01 79将上述报文中的同步字更换为D7 09 D7 09 D7 09,效果是一样的。
RDS100FT 微机保护装置 使用说明书 (LV_H10S10)

微机保护装置使用说明书
2
5
4
10
1.92
1.92
2
5
4
10
1.92
1.92
6.5 过负荷保护校验 ① 参照图 1-1 接线,只接入电流; ② 将过负荷投入,过负荷出口投为跳闸,则整定控制字 1 令 KZ1=0110
0000[60]; ③ 按下表整定过负荷电流,测量动作电流值。保护动作时,测量 A09-A10 端
Ia
B02
A02
Ua
B09
FT
Ub
B10
A09
Uc
B11
A10
UN
B12
装置电源 保入,整定控制字 1 令 KZ1=0000 0001[01]; ③ 按下表整定速断电流,测量动作电流值,记入下表。保护动作时,测量 A09-A10 端子应导通,面板“TRIP”灯亮。
测 A 相动作电流 速断定值(A)
开
轻重高超 机
入
瓦瓦 温温 壳
量
斯斯 告跳 公 地
告 跳 警闸 共
警闸
端
2
装置 电源 名
称
编 号
开关量输入
开 储隔 接闭 开
入
关 能 离 地锁
量
状开开重
状
公
态关关合
态
共
状 状闸 端
态态
1
保护继电器
保保 护护 跳合 闸闸
信号继电器 通讯
跳告 闸警 信信 号号
AC/DC+ AC/DC-
RS485-A RS485-B
2、主要功能 三段过流保护 速断、限时速断、定时限过流 反时限过流保护 反时限曲线可选 过负荷保护 告警/跳闸可选 零序过流保护 告警/跳闸可选 低电压保护 告警/跳闸可选 过电压保护 告警/跳闸可选 失压保护 告警/跳闸可选 断相保护 告警/跳闸可选 三相一次重合闸 后加速保护 变压器本体保护 故障事件记录和查询 RS485 通讯 中文汉字显示
DNP3.0应用备份

关于北京供电局中DNP3.0规约的应用第一部分规约解释DNP3.0规约是美国IEEE的电力工程协会(PES)在IEC的基础上制定的美国国家标准.DNP3.0通讯规约是基于OSI标准七层协议的三层(应用层,数据链路层,物理层)而设计的.下面是对DNP3.0规约的简单介绍:一、数据链路层(一)报文格式START(两个字节):0564H长度:一个字节,指控制字,目的地址,源地址和USEDA TA的总长,最小为5,最大为255。
目的地址:两个字节,低字节在前,是指数据所要到达的站的地址。
源地址:两个字节,低字节在前,是指发出数据的站的地址。
控制字:格式如下原发站到响应站响应站到原发站DIR:为1表示传输的方向是从主站到从站。
为0表示传输的方向是从从站到主站。
PRM:为1表示数据来自原发站为0表示数据来自响应站FCB:帧计数位是用于防止帧丢失或者被重复的传送。
每当成功地完成一次发送确认服务后该位就翻转一次。
FCV:帧计数有效位,为1时表示本帧的FCB必须与最今一帧的FCB位的状态相反。
DFC:次位是被用作防止响应站的缓冲区溢出。
如果DFC被置为1,表示如继续向响应站传输数据,将使响应站的缓冲区溢出。
功能码:发自原发站的功能码用户数据:跟在报文头后面,每一块可包括1至16个字节的数据。
如果数据的长度大于16个字节,则除了最后一个数据块,其他的数据块长度全为16字节CRC:两个字节长。
报文头和每个数据块后都有两个字节的CRC校验码。
CRC计算方法A: 生成多项式= x16+x13+x12+x11+x10+x8+x6+x5+x2+1 (0x3d65)B: 按字节求反序. b7->b0,b6->b1,...,b0->b7C: 查表求CRCD: CRC码按字求反序,b15->b0,b14->b1,...,b0->b15.D: CRC码求反.二、伪传输层伪传输层的作用是当源发站和响应站之间所传输的信息大于一个链路协议数据单元(LPDU)的容量时,要将传输服务数据单元(TSDU)分解成几个传输协议数据单元(TPDUS)进行传输。
8255A的工作方式及其初始化编程

8255A 的工作方式及其初始化编程8255A 有三种工作方式:基本输入/输出方式、单向选通输入/输出方式和双向选通输入/输出方式.1.8255A 的工作方式(1)方式0:基本输入/输出方式(basic Input/Output)方式0是8255A 的基本输入/输出方式,其特点是与外设传送数据时,不需要设置专用的联络(应答)信号,可以无条件的直接进行I/O 传送.A, B, C 3个端口都可以工作在方式0.A 口和B 口工作在方式0时,只能设置为以8位数据格式输入/输出;C 口工作在方式0时,可以高4位和低4位分别设置为数据输入或数据输出方式.方式0常用于与外设无条件数据传送或查询方式数据传送.(2)方式1:单向选通输入/输出方式(strobe Input/Output)方式1是一种带选通信号的单方向输入/输出工作方式,其特点是:与外设传送数据时,需要联络信号进行协调,允许用查询或中断方式传送数据.由于C 口的PC0, PC1和PC2定义为B 口工作在方式1的联络信号线,PC3,PC4和PC5定义为A 口工作方式1的联络信号线,因此只允许A 口和B 口工作在方式1.A 口和B 口工作在方式1,当数据输入时,C 口的引脚信号定义如图7.6所示.PC3, PC4和PC5定义为A 口的联络信号线INTRA, A STB 和IBFA, PC0, PC1和PC2定义为B 口的联络信号线INTRB, IBFB 和B STB ,剩余的PC6和PC7仍可以作为基本I/O 线,工作在方式0.方式1输入联络信号的功能如下:STB (strobe input):选通信号,输入,低电平有效.此信号由外设产生输入,当STB 有效时,选通A 口或B 口的输入数据锁存器,锁存由外设输入的数据,供CPU 读取.IBF(input buffer full):输入缓冲器满信号,输出,高电平有效.当A 口或B 口的输入数据锁存器接收到外设输入的数据时,IBF 变为高电平,作为对外设STB 的响应信号,CPU 读取数据后IBF 被清除.INTR:中断请求信号,输出,高电平有效,用于请求以中断方式传送数据.为了能实现用中断方式传送数据,在8255A 内部设有一个中断允许触发器INTE,当触发器为"1"时允许中断,为"0"时禁止中断.A 口的触发器由PC4置位或复位,B 口的触发器由PC2置位或复位. 方式1数据输入的时序如图7.7所示.当外设的数据准备就绪后,向8255A 发送STB 信号以便锁存输入的数据, STB 的宽度至少为500ns,在STB 有效之后的约300ns,IBF 变为高电平,并一直保持到RD 信号由低电平变为高电平,待CPU 读取数据后约300ns 变为低电平,表示一次数据传送结束.INTR 是在中断允许触发器INTE 为1,且IBF 为1(8255A 接收到数据)的条件下,在STB后沿(由低变高)之后约300ns 变为高电平,用以向CPU 发出中断请求,待RD 变为低电平后约400ns, INTR 被撤销.A 口和B 口工作在方式1,当数据输出时,C 口的引脚信号定义如图7.8所示.PC3, PC6和PC7定义为A 口联络信号线INTRA,A ACK 和A OBF ,PC0,PC1和PC2定义为B 口联络信号线INTRB, B OBF 和B ACK ,剩余的PC4和PC5仍可以作为基本I/O 线,工作在方式0.方式1输出联络信号的功能如下:OBF (output buffer full):输出缓冲器满指示信号输出,低电平有效.OBF 信号由8255A 发送给外设,当CPU 将数据写入数据端口时, OBF 变为低电平,用于通知外设读取数据端口中的数据.ACK (acknowledge input):应答信号,输入,低电平有效. ACK 信号由外设发送给8255A,作为对OBF 信号的响应信号,表示输出的数据已经被外设接收,同时清除OBF 信号.INTR:中断请求信号,输出,高电平有效.用于请求以中断方式传送数据.方式1数据输出的时序如图7.9所示.当CPU 向8255A 写入数据时,WR 信号上升沿后约650ns, OBF 有效,发送给外设,作为外设接收数据的选通信号.当外设接收到送来的数据后,向8255A 回送ACK 信号,作为对OBF 信号的应答.ACK 信号有效之后约350ns, OBF 变为无效,表明一次数据传送结束.INTR 信号在中断允许触发器INTE 为1且信号无效之后约350ns 变为高电平.若用中断方式传送数据时,通常把INTR连到8259A的请求输入端IRi.(3)方式2:双向选通输入/输出方式(bi-directional bus)方式2为双向选通输入/输出方式,是方式1输入和输出的组合,即同一端口的信号线既可以输入又可以输出.由于C口的PC7~PC3定义为A口工作在方式2时的联络信号线,因此只允许A口工作在方式2,引脚信号定义如图7.10所示.由图7.10可以看出,PA7~PA0为双方向数据端口,既可以输入数据又可以输出数据.C口的PC7~PC3定义为A口的联络信号线,其中PC4和PC5作为数据输入时的联络信号线,PC4定义为输入选通信号STB,PC5定义为输入缓冲器满IBFA;APC6和PC7作为数据输出时的联络信号线,PC7定义为输出缓冲器满OBF,PC6定义A为输出应答信号ACK;PC3定义为中断请求信号INTRA.A需要注意的是:输入和输出公用一个中断请求线PC3,但中断允许触发器有两个,即输入中断允许触发器为INTE2,由PC4写入设置,输出中断允许触发器为INTE1,由PC6写入设置,剩余的PC2~PC0仍可以作为基本I/O线,工作在方式0.2.8255A初始化编程8255A的A,B,C三个端口的工作方式是在初始化编程时,通过向8255A的控制端口写入控制字来设定的.8255A由编程写入的控制字有两个:方式控制字和置位/复位控制字.方式控制字用于设置端口A, B, C的工作方式和数据传送方向;置位/复位控制字用于设置C口的PC7~PC0中某一条口线PCi(i=0~7)的电平.两个控制字公用一个端口地址,由控制字的最高位作为区分这两个控制字的标志位.(1)方式控制字的格式 8255A工作方式控制字的格式如图7.11所示.D0:设置PC3~PC0的数据传送方向.D0=1为输入;D0=0为输出.D1:设置B口的数据传送方向.D1=1为输入;D1=0为输出.D2:设置B口的工作方式.D2=1为方式1;D2=0为方式0.D3:设置PC7~PC4的数据传送方向.D3=1为输入;D3=0为输出.D4:设置A口的数据传送方向.D4=1为输入;D4=0为输出.D6D5:设置A口的工作方式.D6D5=00为方式0,D6D5=01为方式1,D6D5=10或11为方式2.D7:方式控制字的标志位,恒为1.例如,将8255A的A口设定为工作方式0输入,B口设定为工作方式1输出,C口没有定义,工作方式控制字为10010100B. (2)C口置位/复位控制字的格式8255A C口置位/复位控制字的格式如图7.12所示.8255A C口置位/复位控制字用于设置C口某一位口线PCi(i=0~7)输出为高电平(置位)或低电平(复位),对各端口的工作方式没有影响.D3~D1:8种状态组合000~111对应表示PC0~PC7.D0:用来设定指定口线PCi为高电平还是低电平.当D0=1时,指定口线PCi输出高电平;当D0=0时,指定口线PCi输出低电平.D6~D4没有定义,状态可以任意,通常设置为0.D7位作为标志位,恒为0.例如,若把PC2口线输出状态设置为高电平,则置位/复位控制字为00000101B.(3)8255A初始化编程8255A的初始化编程比较简单,只需要将工作方式控制字写入控制端口即可.另外,C口置位/复位控制字的写入只是对C口指定位输出状态起作用,对A口和B口的工作方式没有影响,因此只有需要在初始化时指定C口某一位的输出电平时,才写入C口置位/复位控制字.【例7.1】设8255A的A口工作在方式0,数据输出,B口工作在方式1,数据输入,编写初始化程序(设8255A的端口地址为FF80H~FF83H).初始化程序如下:MOV DX, 0FF83H ; 控制寄存器端口地址为FF83HMOV AL, 10000110B ; A口方式0, 数据输出, B口方式1, 数据输入OUT DX, AL ; 将控制字写入控制端【例7.2】将8255A的C口中PC0设置为高电平输出,PC5设置为低电平输出,编写初始化程序(设8255A的端口地址为FF80H~FF83H).初始化程序如下:MOV DX, 0FF83H ; 控制端口的地址为FF83HMOV AL, 00000001B ; PC0设置为高电平输出OUT DX, AL ; 将控制字写入控制端口MOV AL, 00001010B ; PC5设置为低电平输出OUT DX, AL ; 将控制字写入控制端口。
微机原理部分习题和答案
目录第1章微型计算机概述 (2)第2章16位和32位微处理器 (2)第3章Pentium的指令系统 (3)第4章存储器、存储管理和高速缓存技术 (4)第5章微型计算机和外设的数据传输 (5)第6章串并行通信和接口技术 (5)第7章中断控制器 (8)第8章DMA控制器 (10)第9章计数器、定时器和多功能接口芯片 (12)第10章模数和数模转换 (14)第1章微型计算机概述1.CPU在内部结构上由哪几部分组成?CPU应具备哪些主要功能?第2章16位和32位微处理器1.8086从功能上分为哪几个部分?2.8086的总线接口部件由哪几部分组成?3.8086标志寄存器中的内容是什么?4.8086加电后执行的第一条指令的内容及地址是什么?5.8086系统中,设段寄存器CS=1200H,指令指针寄存器IP=FF00H,此时,指令的物理地址是多少?指向这一物理地址的CS和IP值是唯一的吗?6.8086的执行部件有什么功能?由哪几部分组成?7.在总线周期的T1、T2、T3、T4状态,8086分别执行什么动作?什么情况下需要插入等待状态TW?TW在哪儿插入?怎样插入?8.8086是怎样解决地址线和数据线的复用问题的?ALE信号何时处于有效电平?9.BHE#信号和A0信号是通过怎样的组合解决存储器和端口的读写操作的?这种组合决定了8086系统中存储器偶地址体及奇地址体之间应该用什么信号区分?怎样区分?10.中断向量指什么?放在哪里?对应于8086的1CH的中断向量存放在哪里?如果1CH的中断处理子程序从5110H:2030H开始,则中断向量应该怎样存放?11.一个可屏蔽中断响应时,CPU要执行哪些读写周期?对一个软件中断又如何?12.什么叫超标量流水线技术?Pentium有哪两条流水线?两条流水线有什么区别?13.分支预测技术是基于怎样的规律而实施的?叙述分支预测技术的实现原理。
14.Pentium有哪三种工作方式?如何在方式间转换?15.Pentium的保护方式主要保护什么?16.Pentium的地址线是双向的吗?17.实地址方式和虚拟8086方式都是类似于8086的方式,从使用场合和工作特点上看,这两种方式有什么主要差别?18.什么叫段基址?它有多少位?什么叫段选择子?段选择子包含哪些内容?19.Pentium的段描述符寄存器中包含哪些内容?20.Pentium的逻辑地址、线性地址、物理地址分别指什么?它们的寻址能力分别为多少?21.Pentium采用哪几种描述符表?这些表的设置带来什么优点?22.Pentium的主要信号分为哪几类?23.Pentium的寄存器分为哪几类?24.Pentium的段寄存器中存储的是什么?25.Pentium有哪几种总线状态?分别有什么特点?26.什么是突发式数据传输?结合主教材中图2.37说明突发式读写周期的时序关系。
AC4071AC4073使用手册

方式3类似于方式2,只是在计数完成一半(对偶数而言)之前输出保持高电平,对另一半计数时输出将变为低电平。如果计数值是奇数,对N+1/2进行奇数时输出是高电平,而对N-1/2进行计数时输出则是低电平。如果计数寄存器在计数期间重新装入新值,这个新值将在计数输出跳变以后立即反映出来。
方式2:频率发生器
N分频计数器。输出变为低电平的时间是一个输入时钟周期。从一个输出脉冲到下一个输出脉冲之间的时间等于输入至计数寄存器的计数值。如果在两个输出脉冲之间对计数寄存器重新进行装入,则现行计数过程不受影响,但是下一周期将反映新数值。当GATE输入端为低电平时,将迫使输出为高电平。当GATE输入端为高电平时,计数器从预置的计数值开始计数。这样,GATE输入信号就能用来对计数器进行同步。若设定这个方式,则在计数寄存器重新进行装入之前输出将保持高电平。所以,输出信号也能用软件来同步。
JP1:
X
X
-
X
X
-
A4
A5
A6
A7
A8
A9
*本卡出厂设置即为240H。
A0-A3偏移地址(Offset)由AC4071板占用,分配如下:
A0-A3
读操作(RD)
写操作(WR)
0H
读取计数器0数值
装入计数器0数值
1H
读取计数器1数值
装入计数器1数值
2H
读取计数器2数值
装入计数器2数值
3H
写控制字,0 - 2
在计数期间重新对计数寄存器进行装入,将出现以下情况:
(1)写入第一字节停止计数过程。
(2)写入第二字节开始新的计数过程。
当GATE输入端处于高电平时,允许计数,处于低电平便禁止计数。
8253习题

8253习题一、填空题1、82533-5是芯片,也称为片。
2、采用可编程定时/计数器,其定时与计算功能可由设定,设定后与微处理器工作。
3、8253-5内部有个结构完全相同的4、8253-5内部计数器是互相的,它们的输人和输出都取决于控制寄存器中的5、8253-5内部计数器的执行部件CE,实际上是16位计数器,它的初始值是由提供的。
6、8253计数,实际上是对信号线上的信号进行计数。
7、在PC机中,用8253的通道3向系统定时提出动态RAM刷新刷新请求,考虑在PC中选用128K某1位的动态RAM,因此要求在8m内完成芯片256行的刷新。
已确定通道工作在方式2,则要求计数器的负脉冲输出周期为m,若CLK3的输入频率为1.216MHZ,则置入通道3的计数初值为8、某8253的端口地址为40H~43H,若对计数器0进行初始化,则工作方式控制字应写入,计数初始值应写入9、8253在计数过程中,改变计数初始值,必须当外部信号触发后,新的计数值才能有效的工作方式有10、8253工作于方式2时,能产生定时信号,称为速率发生器,又称为11、当8253-5引脚CSA1A0为或等表示无效。
12、8253-5控制寄存器D5D4位为10时,表示读写位。
13、8253-5控制寄存器D5D4位为11时,表示先读写位,后读写位。
信号的,才将写入CR中的计数初值装入计数执行单元CE。
14、8253-5工作于方式2时,当计数结束输出一负脉冲后,时间,又把CR内容装入CE中,开始下一轮计数过程。
15、8253-5工作于方式3时,当计数初值为数时,输出OUT为对称方波;当计数初值为数时,输出OUT为近似对称方波。
二、选择题1、在IBM-PC系统中,8253-5三个通道的计数脉冲信号中()A、取自不同的信号源,具有不同的频率。
B、取自相同的信号源,具有相同的频率。
C、CLK0和CLK1取自同一信号源,而CLK2取自另一信号源。
D、CLK1和CLK2取自同一信号源,而CLK0取自另一信号源。
计算机硬件技术基础 微型计算机原理与接口技术3 可编程并行接口芯片8255

MOV AL,10000010B OUT 43H,AL ;灯全部熄灭 MOV AL,0FFH OUT 40H,AL MOV BX,7FFEH L1:IN AL,41H TEST AL,02H JZ EX TEST AL,01H JZ SS ;K0打开 MOV AL,BH OUT 40H,AL ROR BH,1
7.3.2 内部结构和外部引脚
8255的外部引脚
1. 与外设接口部分
这部分有A、B、C三个8位端口寄存器,通过这24根端口线 PA7-PA0、PB7-PB0、PC7-PC0与外部设备相连。
A、B、C这三个端口的工作方式和A口、B口、C口上半部 、C口下半部的输入输出状态可通过程序来选择。
2. 与微处理器接口部分
MOV CX,10 LEA DI,BUFFER MOV AL,10011000B OUT 63H,AL MOV AL,00000001 OUT 63H,AL LP: IN AL,62H TEST AL,80H JNZ LP AGN:MOV AL,00000000
OUT 63H,AL MOV AL,00000001 OUT 63H,AL IN AL,60H MOV [DI],AL INC DI LOOP LP HLT
基础知识
一、并行通信与串行通信 微机之间或微机中部件之间数据通信的基本方式有两种: 并行通信:利用多条数据传输线将一个数据的各位同时传送。
特点:传输速度快,适用于短距离通信。
基础知识
微机之间或微机中部件之间数据通信的基本方式有两种: 串行通信:利用一条传输线将数据一位位地顺序传送.
特点:通信线路简单,利用电话或电报线路就可实现通信, 成本低,适用于远距离通信,但传输速度慢。
OUT 60H,AL MOV AL,00000000 OUT 63H,AL MOV AL,00000001 OUT 63H,AL INC DI LOOP LP HLT
微机原理与接口技术试题四套卷版+答案

微机原理与接⼝技术试题四套卷版+答案微机原理与接⼝技术考试试卷(A)专业学号姓名成绩⼀、填空题(每⼩题5分,共10分)1. 某控制电路中,输出控制端⼝的⼝地址为34CH,输⼊状态端⼝的⼝地址为34DH。
现从输⼊⼝读⼊外部状态,若不为80H,就输出FFH关闭设备,否则输出00H开启设备。
请完善下⾯的程序。
...............MOV DX, 34DH;①________AL, DX②________AL, 80H③________MOV DX, 34CHMOV AL, 00HOUT DX, AL④________EXITGO-OFF: MOV DX, 34CHMOV AL, ⑤__________OUT DX, ALEXIT: RET2.下⾯是⼀个中断处理⼦程序的加载程序段,中断类型号为60H,请完善该程序段。
INT-INT PROC FAR.......... ;保护现场SUB AX, ①__________;MOV ES, AX;ES清零MOV ②__________,OFFEST inthandlerMOV AX, SEG inthandlerMOV DI ,③__________SHL DI, 1SHL ④__________, 1MOV ⑤__________, BXMOV ES:[DI]+2, AX............;恢复现场RETINT_INT ENDP⼆、单项选择题(每⼩题1分,共10分)1.指令MOV AX,[BX][SI]中源操作数的寻址⽅式是 ( )A.寄存器间接寻址B.变址寻址C.相对寻址D.基址变址寻址2.8086 CPU内有指⽰下条指令有效地址的指⽰器是 ( )A.IPB.SPC.BPD.SI3. .CPU与外设交换数据,当采⽤程序控制I/O⽅式时,是( )。
A.以CPU为主动⽅B.以存储器为主动⽅C.以外设为主动⽅D.外设直接和存储器交换数据4.8253在下⾯⼏种不同的⼯作⽅式中,可⽤GA TE作重触发信号的是( )。
常见规约帧格式一览表:

常见规约帧格式一览表一.C dt规约1.帧格式同步字6B+控制字6B+信息字1(6B)….+信息字n(6B)2.同步字(6B)EB 90 EB 90 EB 903.控制字(6B)控制字节1B+帧类别码1B+信息字数1B+源站地址1B+目的站地址1B+校验码1B (1)控制字节((3)信息字数(4)源站地址(5)目的站地址(6)校验码,从控制字节到目的站址的CRC校验码4. 信息字(6B)功能码+信息+校验码报文如下:A帧:e b 90 eb 90 eb 90 71 61 06 01 01 2f 00 00 00 00 00 ff01 00 00 00 00 9d 02 00 00 00 00 3b 03 00 00 00 00 5904 00 00 00 00 70 05 00 00 00 00 12(重要遥测帧A帧)其中:eb 90 eb 90 eb 90为同步字(6B)其中:71 61 06 01 01 2f为控制字(6B):71为控制字节,61为帧类别码, 06为信息字数,01为源站地址,01为目的站址,2f为CRC校验码其中:00 00 00 00 00 ff为信息字(6B):00为:功能码,00 00为:遥测1,00 00为:遥测2D1帧:eb 90 eb 90 eb 90 71 f4 02 01 01 9c f0 00 00 01 00 e3 f1 00 00 00 00 94(遥信帧(D1帧))其中:f4为帧类别码,f0为:功能码,f1为:功能码,00 00 01 00为:遥信(32个)00 00 00 00为:遥信(32个)二.101规约1.固定帧长帧格式2.可变帧长帧格式4.控制域:主站作为启动站的传输过程中使用的控制域C11)主站向子站传输报文中控制域各位的定义D7 D6 D5 D4 D3 D2 D1 D0传输方向位DIRDIR=0,表示报文是由主站向子站传输启动报文位PRMPRM=1,表示主站为启动站用户1级数据:变位遥信、由读数命令所寻址的信息体的数据、子站初始化结束和子站状态变化。
RTU通讯协议
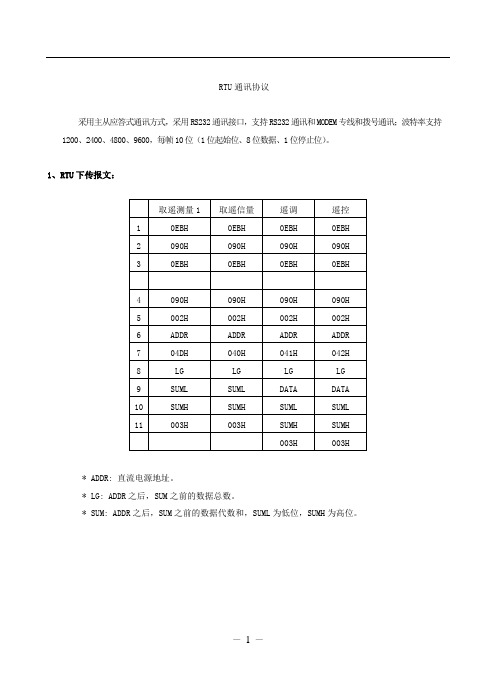
RTU通讯协议采用主从应答式通讯方式,采用RS232通讯接口,支持RS232通讯和MODEM专线和拨号通讯;波特率支持1200、2400、4800、9600,每帧10位(1位起始位、8位数据、1位停止位)。
1、RTU下传报文:* ADDR: 直流电源地址。
* LG: ADDR之后,SUM之前的数据总数。
* SUM: ADDR之后,SUM之前的数据代数和,SUML为低位,SUMH为高位。
2、直流电源上传传报文:2.1 壁挂电源系统遥测量定义:2.2 壁挂电源系统遥信量定义:2.3壁挂电源系统遥调量定义:DATA 定义:每个遥调量由3字节构成,第1字节为信号编号,第2字节为遥调量低字节,第3字节为遥调量高字节,每次送1个遥调量。
直流系统接收遥调命令正确执行后返回ACKI 命令,否则返回NAK 命令。
2.4壁挂电源系统遥控量定义:DATA 定义:每个遥调量由2字节构成,第1字节为信号编号,第2字节为遥控量(00H:信号置0,0FFH:信号置1)。
直流系统接收遥控命令正确执行后返回ACKI 命令,否则返回NAK 命令。
DL451-91(CDT)通讯规约采用RS232通讯接口; 波特率支持1200、2400、4800、9600,字符格式10位(1位起始位、8位数据、1位停止位)。
1.帧定义1.1.帧结构1.2.同步字发送:EBH 90H EBH 90H EBH 90H,共6个字节。
1.3.控制字控制字共有B7 – B12 共6个字节,定义如下:1.3.1.控制字节控制字节定义如下:E:扩展位,E=0 表示使用本协议已定义帧类别码,E=1帧类别码可自定义,本协议中总为0L:帧长定义位,E=0 表示本帧无信息字,E=1 表示本帧有信息字,本协议中总为1S:源站地址有效D:目的站地址有效(上行信息中,S=1,D=1,源站地址为直流设备设置地址,目的站地址为上位机地址,固定为01H。
)(下行信息中,D=1, 目的站地址为直流设备设置地址)1.3.2.帧类别码帧类别码定义如下:1.3.3.信息字数信息字数n表示该帧中所含信息字数量;n=0表示本帧无信息。
华为OptiX系列ETH PWE3特性报文格式
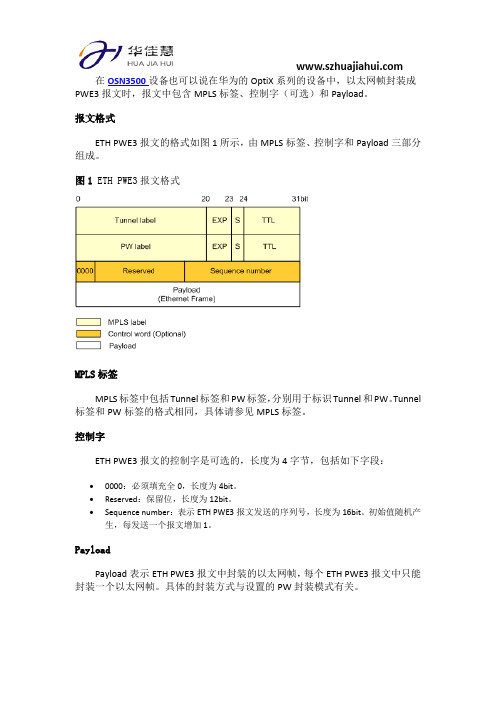
在OSN3500设备也可以说在华为的OptiX系列的设备中,以太网帧封装成PWE3报文时,报文中包含MPLS标签、控制字(可选)和Payload。
报文格式
ETH PWE3报文的格式如图1所示,由MPLS标签、控制字和Payload三部分组成。
图1 ETH PWE3报文格式
MPLS标签
MPLS标签中包括Tunnel标签和PW标签,分别用于标识Tunnel和PW。
Tunnel 标签和PW标签的格式相同,具体请参见MPLS标签。
控制字
ETH PWE3报文的控制字是可选的,长度为4字节,包括如下字段:
∙0000:必须填充全0,长度为4bit。
∙Reserved:保留位,长度为12bit。
∙Sequence number:表示ETH PWE3报文发送的序列号,长度为16bit。
初始值随机产生,每发送一个报文增加1。
Payload
Payload表示ETH PWE3报文中封装的以太网帧,每个ETH PWE3报文中只能封装一个以太网帧。
具体的封装方式与设置的PW封装模式有关。
新部颁CDT92规约

新部颁CDT92规约报文解释一、帧结构帧结构如图1所示。
每帧都以同步字开头,并有控制字,除少数帧外均应有信息字。
信息字的数量依实际需要设定,帧长度可变。
图1帧结构通道发码规则:低字节先送,高字节后送,字节内低位先送,高位后送。
字节的位由高d7到低b0左右排列,如图2所示。
同步字按通道传送顺序分为3组EB90,常用的还有D709。
控制字的格式为图3图3控制字本规约定义的帧类别码及含义见表1。
每个信息字由6个字节构成:功能码1个字节,信息、数据码4个字节和校验码1个字功能码定义功能码有256个(OOH~FFH),分别代表不同信息用途,具体分配见表2。
、报文举例1.遥测报文举例:EB 90 EB 90 EB 90 71 61 10 02 00 2C 00 70 35 47 44 CRC 01 …09 …EB 90 EB 90 EB 90 报文分析:EB 90 EB 90 EB 90 | 71 61 10 02 00 2C| 00 70 35 47 44 CRC 01 …09…同步字| 控制字| 信息字|(1) EB 90 EB 90 EB 90 为三组同步字(2) 71 61 10 02 00 CRC 为控制字,其中的六个字节分别为本例的帧类别为61H,表示本帧为重要遥测帧(A帧)。
信息字数为10H,表示该帧所含信息字数量,如为0表示无信息字。
源地址为02,表示该帧是从02号厂站发出。
目的地址为00,表示该帧是发往00号主站。
校验码为2C。
CDT规约采用CRC校验。
可以使用DF8002系统提供的校验程序进行计算。
(3) 00 70 35 47 44 CRC 01 …09 …为信息字。
其中00 70 35 47 44 CRC表示第一个信息字。
00为功能码,表示第一个信息字。
70 35和47 44表示一个信息字传送的两路遥测量。
以70 35为例:70的二进制代码表示为:35的二进制代码表示为:b11~ b0,则表示为负数,以补码表示,为 111111111101;b14=0表示没有溢出;如 b 141则表示溢出。
艾默生电力电源通信协议

约定:本章的“后台”,“上位机”,“自动化系统”,“远动系统”是同一个概念,指与直流系统通讯的一方。
11.1串行通讯协议串行通讯监控方式支持电力行业标准CDT协议,以接入电力自动化(远动)系统。
CDT协议是循环数据传送,在此方式中,发送端将要发送的数据分组,再按照约定的规则组合成帧。
从一帧的开头到结尾依次向接收端发送,全帧信息传送完毕后,又从头到尾重新传送。
这种方式由发送端周期性地发送信息而不询问接收端的是否接受到,也不要求接收端给予回答。
具体CDT协议标准框架请参考中华人民共和国电力行业标准《循环式远动规约》,代号为(DL 451-91)。
以下介绍本直流系统的CDT协议标准内容。
11.1.1术语定义状态量:用于描述系统运行时的采集量,取值为有限的几个值,并不表示系统的故障情况。
在协议中一般指交流当前工作路号、系统控制方式、电池充电状态、充电模块控制方式、充电模块开/关机状态等五个量,在本协议的遥信量中包括了此类量。
告警量:用于描述系统处于异常时的采集量,取值为0或1,当取值为1时表示系统有故障存在。
在本协议上送遥信量中的大部分都是此类量。
11.1.2物理接口1. 串行通讯口提供RS232、RS485、RS422三种串行通讯方式。
2. 数据传输速率提供600、1200、2400、4800、9600(缺省值)、19200bps五种通讯波特率。
3. 字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
11.1.3帧结构帧结构如图11-1-1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,信息字的个数是可变的,其数值在控制字中有描述。
图11-1-1 帧结构11.1.4同步字本协议的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
11.1.5控制字控制字共有B7~B12个字节,其组成如图11-1-2所示。
b7b0B8B9B10B11B12图11-1-2 控制字组成1. 控制字节说明如图11-1-3所示。
微机原理知识点

1.1 CPU在内部结构上由哪几部分组成?CPU应具备哪些主要功能?答:1.CPU在内部结构上由以下几部分组成:①算术逻辑部件(ALU);②累加器和通用寄存器组;③程序计数器(指令指针)、指令寄存器和译码器;④时序和控制部件。
2.CPU应具备以下主要功能:①可以进行算术和逻辑运算;②可保存少量数据;③能对指令进行译码并执行规定的动作;④能和存储器、外设交换数据;⑤提供整个系统所需要的定时和控制;可以响应其他部件发来的中断请求。
1.2 数据总线和地址总线在结构上有什么不同之处?如果一个系统的数据和地址合用一套总线或者合用部分总线,那么,要靠什么来区分地址或数据?答:1.数据总线是双向三态;地址总线是单向输出三态。
2 数据和地址复用时,必须有一个地址选通信号来区分该总线上输出的是地址还是数据2.1 状态标志和控制标志有何不同?程序中是怎样利用这两类标志的?8086的状态标志和控制标志分别有哪些?答:1.不同之处在于:状态标志由前面指令执行操作的结果对状态标志产生影响,即前面指令执行操作的结果决定状态标志的值。
控制标志是人为设置的。
2.利用状态标志可进行计算和判断等操作。
利用控制标志可对某一种特定功能(如单步操作、可屏蔽中断、串操作指令运行的方向)起控制作用。
3.8086的状态标志有:SF、ZF、PF、CF、AF和OF计6个。
8086的控制标志有:DF、IF、TF计3个。
2.2 总线周期的含义是什么?8086/8088的基本总线周期由几个时钟组成?如一个CPU的时钟频率为24MHz,那么,它的一个时钟周期为多少?一个基本总线周期为多少?如主频为15MHz呢?答:1.总线周期的含义是总线接口部件完成一个取指令或传送数据的完整操作所需的最少时钟周期数。
2.8086/8088的基本总线周期由4个时钟周期组成。
3.当主频为24MHz时,Tφ=1/24MHz≈41.7ns,T总=4Tφ≈167ns。
4.当主频为15MHz时,Tφ=1/15MHz≈66.7ns,T总=4Tφ≈267ns。
PSM-A

PSM-A监控模块后台通讯协议(符合电力系统CDT标准)(版本号:1.1)1、概述本文描述了PSM-A监控模块应用于直流屏时向上级监控设备提供的通讯协议(规约),通过本协议可以获取直流屏的各种运行参数,控制直流屏的运行方式,从而方便地实现四遥功能。
2、适用范围本文适用于深圳华为电气公司的开发人员及测试人员,也适用于采用通讯方式接入我司直流屏设备的各自动化厂家。
3、引用标准本文遵守中华人民共和国电力行业标准(DL 451—91)循环式远动规约标准。
4、术语定义状态量:用于描述系统运行时的采集量,取值为有限的几个值,并不表示系统的故障情况。
在本协议中一般指交流当前工作路号、系统控制方式、电池充电状态、充电模块控制方式、充电模块开/关机状态等五个量,在本协议的遥信量中包括了此类量。
告警量:用于描述系统处于异常时的采集量,取值为0或1,当取值为1时表示系统有故障存在。
在本协议上送遥信量中的大部分都是此类量。
5、物理接口5.1、串行通讯口提供RS232、RS485、RS422三种串行通讯方式(注:在RS485方式下,只支持遥测和遥信命令,不支持遥调和遥控命令)。
5.2、数据传输速率提供600、1200、2400、4800、9600(缺省值)、19200、38400七种通讯波特率。
注:在NP9802、NP9802-A中,只提供1200、2400、4800、9600(缺省值)四种波特率。
5.3、字符格式采用无校验位、8位数据位、1位停止位的异步串行通讯格式。
6、帧6.1、帧结构帧结构如图1所示,每帧都以同步字开头,随后发送1个控制字和多个信息字,图1、帧结构6.2、同步字本协议的同步字按发送的先后顺序为:EB、90、EB、90、EB、90。
6.3、控制字控制字共有B7~B126个字节,其组成如图2所示。
6.3.1 控制字节说明(如图3所示):E:扩展位当E=0时使用表2已定义的帧类别码;当E=1时帧类别码可另行定义,以便扩展功能。
控制字格式

EH
IR
RTS
ER
SBRK RxE DTR TxEN
允许发送
DTR 引脚有效 允许接收 错误标志复位
RTS 引脚有效 内部复位 启动搜索同步字符
(2) 状态寄存器格式:
DSR
SYNDET
FE
OE
PE
TxE RxRDY TxRDY
5
A0
D7
D0
0
R SL EOI 0 0
L2
L1
L0
标志位
001 — 普通 EOI 方式 011 — 特殊 EOI 方式 101 — 普通 EOI 循环方式 111 — 特殊 EOI 循环方式 000 — 自动 EOI 循环(复位) 100 — 自动 EOI 循环(置位) 110 — 置位优先权命令 010 — 无效
附:各芯片控制字及操作字格式
1.8253 模式设置控制字格式:
D7
D0
SC1 SC0 RW1 RW0 M2 M1 M0 BCD
1:BCD 码计数 0:二进制计数
000: 方式 0 001: 方式 1 X10: 方式 2 X11: 方式 3 100: 方式 4 101: 方式 5
00: 计数器锁存,供 CPU 读 01: 只读/写计数器低字节 10: 只读/写计数器高字节 11: 先读/写计数器低字节,后读/写高字节
000 — IR0 001 — IR1 010 — IR2 011 — IR3 100 — IR4 101 — IR5 110 — IR6 111 — IR7
(7)OCW3——特殊屏蔽方0
0
X
ESMM
SMM
0
1
P RR RIS
0X:无效
标