考研高数总复习第七章线性变换第七节(讲解)
第七章线性变换总结篇(高等代数)

第 7章 线性变换7.1知识点归纳与要点解析一.线性变换的概念与判别 1.线性变换的定义数域P 上的线性空间V 的一个变换σ称为线性变换,如果对V 中任意的元素,αβ和数域P 中的任意数k ,都有:()()()σαβσασβ+=+,()()k k σασα=。
注:V 的线性变换就是其保持向量的加法与数量乘法的变换。
2.线性变换的判别设σ为数域P 上线性空间V 的一个变换,那么:σ为V 的线性变换⇔()()()k l k l ,,V ,k,l P σαβσασβαβ+=+∀∈∀∈ 3.线性变换的性质设V 是数域P 上的线性空间,σ为V 的线性变换,12s ,,,,V αααα∀∈L 。
性质1.()()00,σσαα==-;性质2. 若12s ,,,αααL 线性相关,那么()()()12s ,,,σασασαL 也线性相关。
性质3. 设线性变换σ为单射,如果12s ,,,αααL 线性无关,那么()()()12s ,,,σασασαL也线性无关。
注:设V 是数域P 上的线性空间,12,,,m βββL ,12,,,s γγγL 是V 中的两个向量组, 如果:11111221221122221122s ss sm m m ms sc c c c c c c c c βγγγβγγγβγγγ=+++=+++=+++L L LL LL记:()()1121112222121212,,,,,,m m m s s s ms c c c c c c c c c βββγγγ⎛⎫⎪⎪= ⎪⎪⎝⎭L LL L M M M L于是,若()dim V n =,12,,,n αααL 是V 的一组基,σ是V 的线性变换, 12,,,m βββL 是V 中任意一组向量,如果:()()()11111221221122221122n n n n m m m mn nb b b b b b b b b σβααασβααασβααα=+++=+++=+++L L LLLL记:()()()()()1212,,,,m m σβββσβσβσβ=L L那么:()()1121112222121212,,,,,,m m m n n n mn b b c b b c b b c σβββααα⎛⎫⎪ ⎪= ⎪⎪⎝⎭L L L L M M M L设112111222212m m n n mn b b c b b c B b b c ⎛⎫⎪⎪= ⎪⎪⎝⎭L LM M M L,12,,,m ηηηL 是矩阵B 的列向量组,如果12,,,r i i i ηηηL 是12,,,m ηηηL 的一个极大线性无关组,那么()()()12,r i i i σβσβσβL 就是()()()12,m σβσβσβL 的一个极大线性无关组,因此向量组()()()12,m σβσβσβL 的秩等于秩()B 。
高等代数课件(北大版)第七章-线性变换§7.3
1,2, ,n A B
∴ + 在基 1, 2 , , n下的矩阵为A+B.
§7.3 线性变换的矩阵
② 1,2, ,n 1,2, ,n 1,2, ,n B 1, 2, , n B
1,2, ,n AB
∴ 在基 1, 2 , , n下的矩阵为AB.
③ k 1,2, ,n k 1 , ,k n k 1 , ,k n k 1 , , n
k 1, 2, , n k 1,2, , n A 1,2, ,n kA
∴ k 在基 1, 2 , , n下的矩阵为 kA.
§7.3 线性变换的矩阵
④ 由于单位变换(恒等变换) E对应于单位矩阵E.
所以, E
与 AB=BA=E 相对应.
因此,可逆线性变换 与可逆矩阵A对应,且 逆变换 - 1 对应于逆矩阵 A- 1.
x1
,
n
A
x2
xn
1, 2 ,
y1
,n
y2
1, 2 ,
yn
x1
,
n
A
x2
xn
由于 1, 2 ,
, n线性无关,所以
y1 x1
y2
=A
x2
.
yn xn
§7.3 线性变换的矩阵
4.同一线性变换在不同基下矩阵之间的关系
定理4 设线性空间V的线性变换 在两组基
显然,1,2 , ,n 也是一组基,且 在这组基下的
矩阵就是B.
§7.3 线性变换的矩阵
(3)相似矩阵的运算性质 ① 若 B1 X 1A1X , B2 X 1A2 X , 则 B1 B2 X 1( A1 A2 )X , B1B2 X 1( A1A2 )X . 即, A1 A2 B1 B2 , A1 A2 B1B2 .
高等代数课件(北大版)第七章-线性变换§7.7

若 V W1 W2 Ws,则
11, ,1n1 , 21, , 2一组基,且在这组基下 的矩阵为准对角阵
A1
A2
.
As
2023/8/17§7.7 不变子空间 数学与计算科学学院
(1)
反之,若 在基 11, ,1n1 , 21, , 2n2 , , s1, , sns 下的矩阵为准对角矩阵(1), 则由 i1, i2 , , ini 生成 的子空间 Wi 为 的不变子空间,且V具有直和分解:
其次,任取 Vi , 设
( i E )ri Wi 0.
1 2 s , i Wi . 即 1 2 (i ) s 0 令 j j , ( j i); i i .
2023/8/17§7.7 不变子空间 数学与计算科学学院
由(2), 有 ( i E)ri (i ) 0, i 1,2, , s. 又 ( i E)ri (i ) ( i E)ri (i )
Wi fi ( )V , 则Wi 是 fi ( ) 的值域, Wi是 的不变子空间.
又 ( i E)ri Wi ( i E)ri fi ( )V
( i E)ri fi ( ) V f V
( i E)ri Wi 0.
(2)
2023/8/17§7.7 不变子空间 数学与计算科学学院
下证 V V1 V2 Vs . 分三步:
1 . 证明 V W1 W2 Ws .
2 . 证明f1(V1),fV2(2), fVs (s是)直和1 .
3∴. 证存明在多Vi 项 W式i
, i
u1 (
1, 2,
), u2(
, s. ),
, us ( ),
使
u1( ) f ( )1 u2( ) f2( ) us ( ) fs ( ) 1
高等代数 讲义 第七章
(στ ) δ
= σ (τδ )
D( f ( x )) = f ′( x )
J ( f ( x ) ) = ∫ f ( t )dt
x
(2) Eσ = σ E = σ ,E为单位变换 (3)交换律一般不成立,即一般地,
( DJ ) ( f ( x ) ) = D ∫0 f ( t ) dt
x
στ ≠ τσ .
2.线性变换保持线性组合及关系式不变,即
若 β = k1α1 + k2α 2 + L + krα r , 则 σ ( β ) = k1σ (α1 ) + k2σ (α 2 ) + L + krσ (α r ).
例4. 闭区间 [a , b]上的全体连续函数构成的线性空间
C ( a , b ) 上的变换
σ ( X ) = AX , τ ( X ) = XB ,
∀X ∈ P n×n
则 σ ,τ 皆为 P n×n 的线性变换,且对 ∀X ∈ P n×n , 有
(στ )( X ) = σ (τ ( X )) = σ ( XB ) = A( XB ) = AXB , (τσ )( X ) = τ (σ ( X )) = τ ( AX ) = ( AX ) B = AXB .
= σ (τ (α )) + σ (τ ( β )) = (στ )(α ) + (στ )( β ), (στ )( kα ) = σ (τ ( kα )) = σ ( kτ (α )) = kσ (τ (α )) = k (στ )(α )
§7.1 线性变换的定义
2.基本性质
(1)满足结合律:
例1. 线性空间 R[ x ]中,线性变换
第七章 线性变换
第七章 线性变换§1基本知识§1. 1 基本概念 1、线性变换:2、线性变换的运算 (1)加法: (2)减法: (3)数乘: (4)乘法:3、线性变换在给定基下的矩阵:4、矩阵的相似:5、矩阵的迹与范数:6、矩阵的特征多项式:7、特征值与特征根:8、线性变换的对角化:9、线性变换的值域: 10、线性变换的核:11、线性变换的秩与零度: 12不变子空间:13、若尔当块与若尔当形矩阵: 14、最小多项式:§1. 2 基本定理定理7.1设)(V L 是数域P 上的线性空间V 上的线性变换的全体构成的集合,那么)(V L 关于线性变换的加法和数乘运算也构成数域P 上的线性空间;定理7.2设n ααα,,,21 是数域P 上的n 维线性空间V 的一个基,n βββ,,,21 是V 上任意n 个向量,则存在唯一的线性变换)(V L ∈σ,使得:),,2,1()(n i i i ==βασ;定理7.3(线性变换与给定基下的矩阵的对应与运算定理)设n ααα,,,21 是数域P 上的n 维线性空间V 的一个基,对任意线性变换)(V L ∈σ,令σ和它在给定的这个基下的矩阵对应,那么这个对应是)(V L 到n n P ⨯的一一对应,且设)(,V L ∈τσ在这个基下的矩阵分别是B A ,,P k ∈,那么 (1)B A +→+τσ; (2)kA k →σ; (3)AB →στ;(4)σ可逆的充分必要条件是:A 为可逆矩阵;且11--→A σ。
定理7.4(象的坐标计算公式)设)(V L ∈σ在数域P 上的n 维线性空间V 上的基n ααα,,,21 下的矩阵是A ,V ∈α在基n ααα,,,21 下的坐标是),,,(21n x x x ,)(ασ在基n ααα,,,21 下的坐标是),,,(21n y y y ,那么:⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x A y y y 2121; 定理7.5(线性变换关于不同基的矩阵相似定理)设)(V L ∈σ在数域P 上的n 维线性空间V 上的基n ααα,,,21 和n βββ,,,21 下的矩阵分别是A 和B ,基n ααα,,,21 到n βββ,,,21 的过渡矩阵是T ,那么:AT T B 1-=;定理7.6 (线性变换关于不同基的矩阵相似定理)同一线性变换在不同基下的矩阵是相似矩阵;反之,两个相似的矩阵一定可以成为同一个线性变换在两组基下的矩阵;定理7.7 相似矩阵的特征多项式相等;定理7.8 (线性变换对角化的条件)设σ是数域P 上的n 维线性空间V 上的一个线性变换,那么σ在V 的某个基下的矩阵是对角矩阵的充分必要条件是:σ有n 个线性无关的特征向量,即V 有一个由σ的特征向量构成的基; 定理7.9 属于不同特征值的特征向量一定是相性无关的;推论7.1设σ是数域P 上的n 维线性空间V 上的一个线性变换,如果σ的特征多项式在数域P 上有n 个不同的特征值,那么σ可以对角化; 推论7.2 设σ是复数域上的n 维线性空间V 上的一个线性变换,如果σ的特征多项式没有重根,那么σ可以对角化;定理7.10 设t λλλ,,,21 是线性变换σ所有不同的特征值iisi i ααα,,,21是σ的属于特征值i λ的线性无关的特征向量,那么:iiisi i s s ααααααααα,,,;;,,,;,,,21222211121121线性无关;定理7.11设σ是数域P 上的n 维线性空间V 上的一个线性变换,n ααα,,,21 是V 的一个基,σ在基n ααα,,,21 下的矩阵是A ,那么 (1)))(,),(),(()(21n L V ασασασσ =; (2)σ的秩)(A R =;定理7.12设σ是数域P 上的n 维线性空间V 上的一个线性变换,则σ的值域的一个基的原象和σ的核的一个基并起来构成V 的一个基;由此得:σ的秩+σ的零度n =。
高等代数--第七章 线性变换_OK
45
线性变换的乘法
首先,线性空间的线性变换作为映射的特殊 情形当然可以定义乘法。设A,B 是线性空间V 的两个线性变换,定义它们的乘积AB为
(A B )() A (B ()) ( V ).
容易证明,线性变换的乘积也是线性变换。事 实上,
(A B )( ) A (B ( )) A (B () B ())
A ( ) k1A (1) k2A (2) krA (r ),
14
又如果1 , 2 ,, r之间有一线性关系式 k11 k22 krr 0,
那么它们的象之间也有同样的关系
A ( ) k1A (1) k2A (2) krA (r ),
15
3. 线性变换把线性相关的向量组变成线性 相关的向量组.
A x1A 1 x2A 2 xnA n x1B 1 x2B 2 xnB n B .
20
结论1的意义就是,一个线性变换完全被它 在一组基上的作用所决定。
2.设 1,2,,n是线性空间V的一组基。对于
任意一组向量 1,2,,n一定有一个线性变换A
使
A i i ,i 1, 2, , n.
46
A (B ()) A (B ( )) (A B )( ) (A B )( ),
(A B )(k) A (B (k)) A (kB ())
kA (B ()) k(A B )().
这说明AB是线性的。
既然一般映射的乘法适合结合律,线性变换
的乘法当然也适合结合律,即
(A B )C A (B C ).
29
例3 在 F 22 中定义线性变换 A
X
a c
b
d
X
第七章 线性变换

,即A
1
B .
可以证明,可逆线性变换一定是双射,从而它就是线性空间到其自身的同构映射。
类似于方阵的幂与多项式概念,关于线性变换,也有所谓幂与多项式概念,具体如下 定义 1.7 设 A L(V ), 利用乘法定义可以归纳地定义线性变换的正整数次幂:
2
A
A A , A
3
A
2
A , , A
第七章
线性变换
变换的思想是数学中一个十分重要的思想,几乎可以说无处不在,也可以这么说,如 果不研究变换,数学就变得死水一潭、没有意义。线性变换是高等代数中一个重要概念, 它对研究线性空间本身结构有着重要作用,为矩阵运算的简化以及矩阵的分解提供了方法。
§1
线性空间上的线性变换及其运算
如果说同构映射反映了两个线性空间之间的关系, 那么, 这一节将要介绍的线性空间上 的线性变换反映的将是线性空间到其自身的关系。 定义 1.1 设 V 是数域 P 上一个线性空间,如果映射 A : V V 满足:
3
( x, y, z )T 3 , 定义 A ( x, y, 0)T 3 , 证明: A 是 3 上的线性变换。
4. 设 A 是实数域 上 3 维线性空间 中绕 Oz 轴由 Ox 向 Oy 方向旋转 90 的变换,证
3
明: A 是 上的线性变换,并且 A 5. 6. 证明性质 1.1, 1.3.
3
4
E .
在 P[ x] 中, 对任意 f ( x) P[ x], A f ( x) f' ( x), B f ( x) xf ( x), 其中 f' ( x) 是 f ( x) 的导函数,证明: AB BA E , 这里E 为恒等变换。
高等代数讲义ppt第七章 线性变换
(4) 若A 是可逆的,则矩阵 A 也可逆,且A-1的矩阵是A-1。
例5 设 V是数域P上的n维线性空间,则L(V)与P n×n同构。
例6 设 A1,A2是 n 维线性空间 V 的两个线性变换,证明: A2V⊂A1V 的充要条件是存在线性变换 A 使得 A2=A1A 。
线性变换
§3 线性变换的矩阵
例4 设 A 是n维线性空间V的一个线性变换, A3=2E, B =A2-2A+2E, 证明:A,B都是可逆变换。
线性变换
§3 线性变换的矩阵
§3 线性变换的矩阵
定理1 设1, 2 , , n是线性空间V的一组基, 对V中任意n个向量 1,2 , ,n 存在唯一的线性变换 A∈L(V) 使任的何像得元,素只都要可选以取是适基当
线性变换
§1 线性变换的定义
二、线性变换的性质
性质1 设 A 是V的线性变换,则 A(0) 0, A( ) A()
性质2 线性变换保持线性组合与线性关系式不变。
性质3 线性变换把线性相关的向量组变成线性相关的向量组。
注意: 线性变换可能把线性无关的向量组变成线性相关的 向量组。
例3 设 1,2, ,r 是线性空间V的一组向量,A 是V的一个线
线性变换的加法满足以下运算规律:
(1) A + ( B + C ) = ( A + B ) + C
(2) A + B = B + A
线性变换
§2 线性变换的运算
定义2 设 A∈L(V),k∈P,对k与 A 的数量乘积 kA 定义为:
(kA) k A, V
结论2 对∀A ∈L(V),k∈P 有 kA∈L(V)。
Amn AmAn , (Am )n Amn, m, n N
高代讲义7
第七章 线性变换§1 线性变换的定义一、线性变换的定义线性空间V 到自身的映射称为V 的一个变换.定义1 线性空间V 的一个变换A 称为线性变换,如果对于V 中任意的元素βα,和数域P 中任意数k ,都有A (βα+)=A (α)+A (β);A (αk )=A k (α). (1) 一般用花体拉丁字母A ,B ,…表示V 的线性变换,A (α)或A α代表元素α在变换A 下的像.定义中等式(1)所表示的性质,有时也说成线性变换保持向量的加法与数量乘法.例1.平面上的向量构成实数域上的二维线性空间.把平面围绕坐标原点按反时钟方向旋转θ角,就是一个线性变换,用ℐθ表示.如果平面上一个向量α在直角坐标系下的坐标是),(y x ,那么像ℐθ(α)的坐标,即α旋转θ角之后的坐标),(y x ''是按照公式⎪⎪⎭⎫ ⎝⎛⎪⎪⎭⎫ ⎝⎛-=⎪⎪⎭⎫ ⎝⎛''y x y x θθθθcos sin sin cos . 来计算的.同样空间中绕轴的旋转也是一个线性变换.例2 设α是几何空间中一固定非零向量,把每个向量ξ变到它在α上的内射影的变换也是一个线性变换,以α∏表示它.用公式表示就是αααξαξα),(),()(=∏.这里),(),,(ααξα表示内积.例3 线性空间V 中的恒等变换或称单位变换E ,即E )()(V ∈=ααα以及零变换ℴ,即ℴ)(0)(V ∈=αα 都是线性变换.例4 设V 是数域P 上的线性空间,k 是P 中的某个数,定义V 的变换如下: V k ∈→ααα,.这是一个线性变换,称为由数k 决定的数乘变换,可用K 表示.显然当1=k 时,便得恒等变换,当0=k 时,便得零变换.例5 在线性空间][x P 或者n x P ][中,求微商是一个线性变换.这个变换通常用D 代表,即D ()(x f )=)(x f '.例6 定义在闭区间[]b a ,上的全体连续函数组成实数域上一线性空间,以),(b a C 代表.在这个空间中变换ℐ()(x f )=⎰xa dt t f )( 是一线性变换.二、线性变换的简单性质:1. 设A 是V 的线性变换,则A (0)=0, A (α-)=-A (α).2. 线性变换保持线性组合与线性关系式不变.换句话说,如果β是r ααα,,,21 的线性组合:r r k k k αααβ+++= 2211,那么经过线性变换A 之后,A (β)是A (1α),A (2α),…, A (r α)同样的线性组合:A (β)=1k A (1α)+2k A (2α)+…+ r k A (r α)又如果r ααα,,,21 之间有一线性关系式02211=+++r r k k k ααα那么它们的像之间也有同样的关系式1k A (1α)+2k A (2α)+…+ r k A (r α)=0.3. 线性变换把线性相关的向量组变成线性相关的向量组.§2 线性变换的运算一、线性变换的乘法设A,,B 是线性空间V 的两个线性变换,定义它们的乘积为.(AB )(α)= A,(B (α)) (V ∈α).则线性变换的乘积也是线性变换.线性变换的乘法适合结合律,即(AB)C=A(BC).但线性变换的乘法不适合交换律.例如,在实数域上的线性空间中,线性变换D ()(x f )=)(x f '.ℐ()(x f )=⎰xa dt t f )( 的乘积D ℐ=ℰ,但一般ℐD ≠ℰ.对于任意线性变换A ,都有A ℰ=ℰA = A .二、线性变换的加法设A,B 是线性空间V 的两个线性变换,定义它们的和A+B 为(A+B )(α)= A (α)+B (α) (V ∈α).则线性变换的和还是线性变换.线性变换的加法适合结合律与交换律,即A+(B+C)=(A+B)+C.A+B=B+A.对于加法,零变换ℴ与所有线性变换A的和仍等于A:A+ℴ=A.对于每个线性变换A,可以定义它的负变换(-A):α).(-A)(α)=- A (α) (V∈则负变换(-A)也是线性变换,且A+(-A)=ℴ.线性变换的乘法对加法有左右分配律,即A(B+C)=AB+AC,(B+C)A=BA+CA.三、线性变换的数量乘法数域P中的数与线性变换A的数量乘法定义为k A =KA即k A(α)=K(A (α))=KA (α),当然A还是线性变换.线性变换的数量乘法适合以下的规律:)(kl A=k(l A),k+A=k A+l A,(l)k(A+B)=k A+k B,1A=A.线性空间V 上全体线性变换,对于如上定义的加法与数量乘法,也构成数域P 上一个线性空间.V 的变换A 称为可逆的,如果有V 的变换B 存在,使AB=BA=E .这时,变换B 称为A 的逆变换,记为A 1-.如果线性变换A 是可逆的,那么它的逆变换A 1-也是线性变换.既然线性变换的乘法满足结合律,当若干个线性变换A 重复相乘时,其最终结果是完全确定的,与乘法的结合方法无关.因此当n 个(n 是正整数)线性变换A 相乘时,就可以用个n A AA来表示,称为A 的n 次幂,简记为A n .作为定义,令A 0= E .根据线性变换幂的定义,可以推出指数法则:A n m +=A m A n ,(A m )n =A m n )0,(≥n m当线性变换A 可逆时,定义A 的负整数幂为A n -=(A 1-)n (n 是正整数).值得注意的是,线性变换乘积的指数法则不成立,即一般说来(AB )n ≠A n B n .设011)(a x a x a x f m m m m +++=--是][x P 中一多项式,A 是V 的一个线性变换,定义f (A )=m a A m +1-m a A 1-m +…+0a E显然f (A )是一线性变换,它称为线性变换A 的多项式.不难验证,如果在][x P 中,)()()(,)()()(x g x f x p x g x f x h =+=那么h (A )=f ( A )+g ( A ), p (A )=f ( A )g ( A ).特别地,f (A )g ( A )=g ( A )f ( A ).即同一个线性变换的多项式的乘法是可交换的.例1 在三维几何空间中,对于某一向量α的内射影α∏是一个线性变换. α∏可以用下面的公式来表示:αααξαξα),(),()(=∏. 其中),(),,(ααξα表示向量的内积.从图2不难看出,ζ在以α为法向量的平面x 上的内射影)(ζx ∏可以用公式)()(ζζζα∏-=∏x表示.因此=∏x ℰ-α∏.这里ℰ是恒等变换.ζ对于平面x 的反射ℛx 也是一个线性变换,它的像由公式ℛ)(2)(ζζζα∏-=x给出.因此ℛx =ℰ-2α∏.设βα,是空间的两个向量.显然,α与β互相垂直的充要条件为=∏⋅∏βαℴ例2 在线性空间n P ][λ中,求微商是一个线性变换,用D 表示.显然有D =n ℴ.其次,变换的平移P a a f f ∈+→)()(λλ也是一个线性变换,用ℐa 表示.根据泰勒展开式)()!1()(!2)()()()1(12λλλλλ---++''+'+=+n n f n a f a f a f a f , 因之ℐa 实质上是℄的多项式:ℐa =ℰ+a D +!22a D 2+…+)!1(1--n a n D 1-n .§3 线性变换和矩阵一、线性变换关于基的矩阵设V 是数域P 上n 维线性空间.n εεε,,,21 V 的一组基,现在建立线性变换与矩阵关系.空间V 中任意一个向量ξ可以被基n εεε,,,21 线性表出,即有关系式n n x x x εεεξ+++= 2211 (1)其中系数是唯一确定的,它们就是ξ在这组基下的坐标.由于线性变换保持线性关系不变,因而在ξ的像A ξ与基的像A 1ε,A 2ε,…,A n ε之间也必然有相同的关系:A ξ=A (n n x x x εεε+++ 2211)=1x A (1ε)+2x A (2ε)+…+n x A (n ε) (2) 上式表明,如果知道了基n εεε,,,21 的像,那么线性空间中任意一个向量ξ的像也就知道了,或者说1. 设n εεε,,,21 是线性空间V 的一组基,如果线性变换Å与ℬ在这组基上的作用相同,即A i ε=B i ε, ,,,2,1n i =那么A = B .结论1的意义就是,一个线性变换完全被它在一组基上的作用所决定.下面指出,基向量的像却完全可以是任意的,也就是2. 设n εεε,,,21 是线性空间V 的一组基,对于任意一组向量n ααα,,,21 一定有一个线性变换Å使A i ε=i α .,,2,1n i =定理1 设n εεε,,,21 是线性空间V 的一组基,n ααα,,,21 是V 中任意n 个向量.存在唯一的线性变换Å使A i ε=i α .,,2,1n i =定义2 设n εεε,,,21 是数域P 上n 维线性空间V 的一组基,A 是V 中的一个线性变换.基向量的像可以被基线性表出:⎪⎪⎩⎪⎪⎨⎧+++=+++=+++=.,,22112222112212211111n nn n n n n n n n a a a A a a a A a a a A εεεεεεεεεεεε 用矩阵表示就是A (n εεε,,,21 )=(A (1ε),A Å(2ε),…, A (n ε))=A n ),,,(21εεε (5) 其中⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=nn n n n n a a a a a a a a a A 212222111211矩阵A 称为线性变换A 在基n εεε,,,21 下的矩阵.例 1 设m εεε,,,21 是n )(m n >维线性空间V 的子空间W 的一组基,把它扩充为V 的一组基n εεε,,,21 .指定线性变换A 如下⎩⎨⎧+====.,,1,0,,,2,1,n m i A m i A ii i εεε 如此确定的线性变换A 称为子空间W 的一个投影.不难证明A 2=A投影A 在基n εεε,,,21 下的矩阵是⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00111 这样,在取定一组基之后,就建立了由数域P 上的n 维线性空间V 的线性变换到数域P 上的n n ⨯矩阵的一个映射.前面结论1说明这个映射是单射,结论2说明这个映射是满射.换句话说,在这二者之间建立了一个双射.这个对应的重要性表现在它保持运算,即有定理2 设n εεε,,,21 是数域P 上n 维线性空间V 的一组基,在这组基下,每个线性变换按公式(5)对应一个n n ⨯矩阵,这个对应具有以下性质:1)线性变换的和对应于矩阵的和;2)线性变换的乘积对应于矩阵的乘积;3)线性变换的数量乘积对应于矩阵的数量乘积;4)可逆的线性变换与可逆矩阵对应,且逆变换对应于逆矩阵. 定理2 说明数域P 上n 维线性空间V 的全体线性变换组成的集合)(V L 对于线性变换的加法与数量乘法构成P 上一个线性空间,与数域P 上n 级方阵构成的线性空间n n P ⨯同构.定理3 设线性变换A 在基n εεε,,,21 下的矩阵是A ,向量ξ在基n εεε,,,21 下的坐标是),,,(21n x x x ,则A ξ在基n εεε,,,21 下的坐标),,,(21n y y y 可以按公式⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x A y y y 2121 计算.二、同一个线性变换在不同基下的矩阵的关系.线性变换的矩阵是与空间中一组基联系在一起的.一般说来,随着基的改变,同一个线性变换就有不同的矩阵.为了利用矩阵来研究线性变换,有必要弄清楚线性变换的矩阵是如何随着基的改变而改变的.定理4设线性空间V 中线性变换A 在两组基n εεε,,,21 , (6)n ηηη,,,21 (7)下的矩阵分别为A 和B 从基(6)到(7)的过渡矩阵是X ,于是AX X B 1-=. 定理4 告诉我们,同一个线性变换A 在不同基下的矩阵之间的关系. 定义3 设A ,B 为数域P 上两个n 级方阵,如果可以找到数域P 上的n 级可逆方阵X ,使得AX X B 1-=,就说A 相似于B ,记作B A ~. 相似是矩阵之间的一种关系,这种关系具有下面三个性质:1. 反身性:A A ~2. 对称性:如果B A ~,那么A B ~.3. 传递性:如果B A ~,C B ~,那么C A ~.定理 5 线性变换在不同基下所对应的矩阵是相似的;反过来,如果两个矩阵相似,那么它们可以看作同一个线性变换在两组基下所对应的矩阵.矩阵的相似对于运算有下面的性质. 如果X A X B 111-=,X A X B 212-=,那么X A A X B B )(21121+=+-, X A A X B B )(21121-=由此可知,如果AX X B 1-=,且)(x f 是数域P 上一多项式,那么X A f X B f )()(1-=利用矩阵相似的这个性质可以简化矩阵的计算.例 2 设V 是数域P 上一个二维线性空间,21,εε是一组基,线性变换A 在21,εε下的矩阵是⎪⎪⎭⎫ ⎝⎛-0112 计算A 在V 的另一组基21,ηη下的矩阵,这里⎪⎪⎭⎫⎝⎛--=2111),(),(2121εεηη§4 特征值与特征向量一、线性变换的特征值和特征向量的概念定义4 设A 是数域P 上线性空间V 的一个线性变换,如果对于数域P 中一数0λ,存在一个非零向量ξ,使得A ξ=0λξ. (1) 那么0λ称为A 的一个特征值,而ξ叫做A 的属于特征值0λ的一个特征向量.从几何上来看,特征向量的方向经过线性变换后,保持在同一条直线上,这时或者方向不变)0(0>λ或者方向相反)0(0<λ,至于)0(0=λ时,特征向量就被线性变换变成0.如果ξ是线性变换A 的属于特征值0λ的特征向量,那么ξ的任何一个非零倍数ξk 也是A 的属于特征值0λ的特征向量.这说明特征向量不是被特征值所唯一决定的.相反,特征值却是被特征向量所唯一决定的,因为,一个特征向量只能属于一个特征值.二、特征值与特征向量的求法设V 是数域P 上n 维线性空间,n εεε,,,21 是它的一组基,线性变换A 在这组基下的矩阵是A .设0λ是特征值,它的一个特征向量ξ在n εεε,,,21 下的坐标是n x x x 00201,,, ,则A ξ的坐标是⎪⎪⎪⎪⎪⎭⎫⎝⎛n x x x A 00201 .ξλ0的坐标是⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n x x x 002010 λ因此(1)式相当于坐标之间的等式⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛n n x x x x x x A 00201000201 λ (2)或0)(002010=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛-n x x x A E λ这说明特征向量ξ的坐标),,,(00201n x x x 满足齐次方程组⎪⎪⎩⎪⎪⎨⎧=+++=+++=+++,,,02211202222121101212111n n nn n n n n n n x x a x a x a x x a x a x a x x a x a x a λλλ 即⎪⎪⎩⎪⎪⎨⎧=-+---=---+-=----,0)(,0)(,0)(022112222012112121110n nn n n nn n n x a x a x a x a x a x a x a x a x a λλλ (3) 由于0≠ξ,所以它的坐标n x x x 00201,,, 不全为零,即齐次方程组有非零解.而齐次方程组有非零解的充要条件是它的系数行列式为零,即00212220211121100=---------=-nnn n n n a a a a a a a a a A E λλλλ.定义5 设A 是数域P 上一个n 级矩阵,λ是一个数字.矩阵A E -λ的行列式.212222111211nnn n nn a a a a a a a a a A E ---------=-λλλλ(4)叫做矩阵A 的特征多项式,这是数域P 上的一个n 次多项式.上面的分析说明,如果0λ是线性变换A 的特征值,那么0λ一定是矩阵A 的特征多项式的一个根;反过来,如果0λ是矩阵A 的特征多项式在数域P 中的一个根,即00=-A E λ,那么齐次方程组(3)就有非零解.这时,如果),,,(00201n x x x 是方程组(3)的一个非零解,那么非零向量)0202101n n x x x εεεξ+++=满足(1),即0λ是线性变换A 的一个特征值,ξ就是属于特征值0λ的一个特征向量.因此确定一个线性变换A 的一个特征值与特征向量的方法可以分成以下几步:1.在线性空间V 中取一组基n εεε,,,21 ,写出A 在这组基下的矩阵A ;2.求出A 的特征多项式A E -0λ在数域P 中全部的根,它们也就是线性变换A 的全部特征值;3.把所求得的特征值逐个地代入方程组(3),对于每一个特征值,解方程组(3),求出一组基础解系,它们就是属于这个特征值的几个线性无关的特征向量在基n εεε,,,21 下的坐标,这样,也就求出了属于每个特征征的全部线性无关的特征向量.矩阵A 的特征多项式的根有时也称为A 的特征值,而相应的线性方程组(3)的解也就称为A 的属于这个特征值的特征向量.例1 在n 维线性空间中,数乘变换K 在任意一组基下的矩阵都是kE ,它的特征多项式是n k kE E )(-=-λλ.因此,数乘变换K 的特征值只有k ,由定义可知,每个非零向量都是属于数乘变换K 的特征向量.例2 设线性变换A 在基321,,εεε下的矩阵是⎪⎪⎪⎭⎫⎝⎛=122212221A ,求A 的特征值与特征向量.例3 在空间n x P ][中,线性变换D )()(x f x f '=在基)!1(,,!2,,112--n x x x n 下的矩阵是⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=0000100001000010 DD 的特征多项式是n D E λλλλλ=---=- 001000010001.因此,D 的特征值只有0.通过解相应的齐次线性方程组知道,属于特征值0的线性无关的特征向量组只能是任一非零常数.这表明微商为零的多项式只能是零或非零的常数.例4 平面上全体向量构成实数域上一个二维线性空间,§1例1中旋转ℱθ在直角坐标系下的矩阵为⎪⎪⎭⎫⎝⎛-θθθθcos sin sin cos 它的特征多项式为1cos 2cos sin sin cos 2+-=---θλλθλθθθλ当πθk ≠时,这个多项式没有实根.因之,当πθk ≠时,ℱθ没有特征值.从几何上看,这个结论是明显的.容易看出,对于线性变换A 的任一个特征值0λ,全部适合条件A αλα0=的向量α所成的集合,也就是A 的属于0λ的全部特征向量再添上零向量所成的集合,是V 的一个子空间,称为A 的一个特征子空间,记为0λV .显然,0λV 的维数就是属于0λ的线性无关的特征向量的最大个数.用集合记号可写为.{}V A V ∈==ααλααλ,|00在线性变换的研究中,矩阵的特征多项式是重要的.下面先来看一下它的系数.在.212222111211nnn n nn a a a a a a a a a A E ---------=-λλλλ的展开式中,有一项是主对角线上元素的连乘积)())((2211nn a a a ---λλλ展开式中的其余项,至多包含2-n 个主对角线上的元素,它对λ的次数最多是2-n .因此特征多项式中含λ的n 次与1-n 次的项只能在主对角线上元素的连乘积中出现,它们是12211)(-+++-n nn n a a a λλ .在特征多项式中令0=λ,即得常数项A A n )1(-=-.因此,如果只写特征多项式的前两项与常数项,就有A a a a A E n n nn n )1()(12211-+++++-=-- λλλ. (5)由根与系数的关系可知,A 的全体特征值的和为nna a a +++ 2211(称为A 的迹).而的A 全体特征值的积为A .特征值自然是被线性变换所决定的.但是在有限维空间中,任取一组基后,特征值就是线性变换在这组基下矩阵的特征多项式的根.随着基的不同,线性变换的矩阵一般是不同的.但是这些矩阵是相似的,对于相似矩阵有定理6 相似矩阵有相同的特征多项式.定理6说明,线性变换的矩阵的特征多项式与基的选取无关,它直接被线性变换所决定的.因此,以后就可以说线性变换的特征多项式了.既然相似的矩阵有相同的特征多项式,当然特征多项式的各项系数对于相似的矩阵来说都是相同的.考虑特征多项式的常数项,得到相似矩阵有相同的行列式.因此,以后就可以说线性变换的行列式.应该指出,定理6的逆是不对的,特征多项式相同的矩阵不一定是相似的.例如⎪⎪⎭⎫⎝⎛=⎪⎪⎭⎫ ⎝⎛=1011,1001B A它们的特征多项式都是)1(-λ,但A 和B 不相似,因为和A 相似的矩阵只能是A 本身.哈密顿-凯莱(Hamilton-Caylay)定理 设A 是数域P 上一个n n ⨯矩阵,A E f -=λλ)(是A 的特征多项式,则0)1()()(12211=-+++++-=-E A A a a a A A f n n nn n推论 设A 是有限维空间V 的线性变换,)(λf 是A 的特征多项式,那么f (A )=ℴ.§5 对角矩阵定理7 设A 是n 维线性空间V 的一个线性变换,A 的矩阵可以在某一基下为对角矩阵的充要条件是A 有n 个线性无关的特征向量.定理8 属于不同特征值的特征向量是线性无关的.推论1 如果在n 维线性空间V 中,线性变换A 的特征多项式在数域P 中有n 个不同的根,即Å有n 个不同的特征值,那么A 在某组基下的矩阵是对角形的.推论2 在复数上的线性空间中,如果线性变换A 的特征多项式没有重根,那么A 在某组基下的矩阵是对角形的.在一个线性变换没有个不同的特征值的情形,要判断这个线性变换的矩阵能不能成为对角形,问题就要复杂些.定理9 如果k λλ,,1 是线性变换A 的不同的特征值,而i ir i αα,,1 是属于特征值i λ的线性无关的特征向量,k i ,,2,1 =那么向量组kkr k ir αααα,,,,,,1111也线性无关.根据这个定理,对于一个线性变换,求出属于每个特征值的线性无关的特征向量,把它们合在一起还是线性无关的.如果它们的个数等于空间的维数,那么这个线性变换在一组合适的基下的矩阵是对角矩阵;如果它们的个数少于空间的维数,那么这个线性变换在任何一组基下的矩阵都不能是对角形.换句话说,设A 全部不同的特征值是r λλ,,1 ,于是A 在某一组基下的矩阵成对角形的充要条件是A 的特征子空间r V V λλ,,1 的维数之和等于空间的维数.应该看到,当线性变换A 在一组基下的矩阵A 是对角形时:⎪⎪⎪⎪⎪⎭⎫⎝⎛=n A λλλ 00000000021 A 的特征多项式就是)())((21n A E λλλλλλλ---=-因此,如果线性变换A 在一组基下的矩阵是对角形,那么主对角线上的元素除排列次序外是确定的,它们正好是A 的特征多项式全部的根(重根按重数计算).根据§3定理5,一个线性变换的矩阵能不能在某一组基下是对角形的问题就相当于一个矩阵是不是相似于一个对角矩阵的问题.例 在§4的例2中,已经算出线性变换A 的特征值是-1(二重)与5,而对应的特征向量是.,,3213322311εεεξεεξεεξ++=-=-= 由此可见,A 在基.,,321ξξξ下的矩阵为对角矩阵⎪⎪⎪⎭⎫ ⎝⎛--=500010001B而由321,,εεε到.,,321ξξξ的过渡矩阵是⎪⎪⎪⎭⎫ ⎝⎛--=111110101X于是,B AX X =-1.§6 线性变换的值域与核定义6 设A 是线性空间V 的一个线性变换,A 的全体像组成的集合称为A 的值域,用A V 表示.所有被A 变成零向量的向量组成的集合称为A 的核,用A )0(1-表示.若用集合的记号则A V ={}V A ∈ξξ|,A )0(1-={}V A ∈=ξξξ,0| 线性变换的值域与核都是V 的子空间.A V 的维数称为A 的秩,A )0(1-的维数称为A 的零度. 例1 在线性空间n x P ][中,令D )())((x f x f '=则D 的值域就是1][-n x P ,D 的核就是子空间P .定理10 设A 是n 维线性空间V 的线性变换,n εεε,,,21 是V 的一组基,在这组基下A 的矩阵是A ,则1) A 的值域A V 是由基像组生成的子空间,即A V =),,,(21n A A A L εεε2) A 的秩=A 的秩.定理10说明线性变换与矩阵之间的对应关系保持不变.定理11 设A 是n 维线性空间V 的线性变换,则A V 的一组基的原像及A )0(1-的一组基合起来就是V 的一组基.由此还有A 的秩+A 的零度=n推论 对于有限维线性空间的线性变换,它是单射的充要条件是它是满射. 虽然子空间A V 与A )0(1-的维数之和为n ,但是A V +A )0(1-并不一定是整个空间.例2 设A 是一个n n ⨯矩阵,A A =2证明A 相似于一个对角矩阵⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛00111 (1)§7 不变子空间对于给定的n 维线性空间V ,A ∈)(V L ,如何才能选到V 的一个基,使A 关于这个基的矩阵具有尽可能简单的形式.由于一个线性变换关于不同基的矩阵是相似的.因而问题也可以这样提出:在一切彼此相似的n 阶矩阵中,如何选出一个形式尽可能简单的矩阵.这一节介绍不变子空间的概念,来说明线性变换的矩阵的化简与线性变换的内在联系.定义7 设A 是数域P 上线性空间V 的线性变换,W 是V 的一个子空间.如果W 中的向量在A 下的像仍在W 中,换句话说,对于W 中任一向量ξ,有A W ∈ξ,就称W 是A 的不变子空间,简称A -子空间.例1 整个空间V 和零子空间{}0,对于每个线性变换A ,都是A -子空间. 例2 A 的值域与核都是A -子空间.例3 若线性变换A 与B 是可交换的,则B 的核与值都是A -子空间. 因为A 的多项式f (A )是和A 交换的,所以f (A )的值域与核都是A -子空间.例4 任何一个子空间都是数乘变换的不变子空间.特征子空间与一维不变子空间之间有着紧密的联系.设W 是一维A -子空间,ξ是W 中任何一个非零向量,它构成W 的一个基.按A -子空间的定义,A W ∈ξ,它必是ξ的一个倍数:A ξλξ0=.这说明ξ是A 的特征向量,而W 即是由ξ生成的一维A -子空间.反过来,设ξ是A 属于特征值0λ的一个特征向量,则ξ以及它任一倍数在A 下的像是原像的0λ倍,仍旧是ξ的一个倍数.这说明ξ的倍数构成一个一维A -子空间.显然,A 的属于特征值0λ的一个特征子空间0λV 也是A 的一不变子空间. A -子空间的和与交还是A -子空间.设A 是线性空间V 的线性变换, W 是A 的不变子空间.由于W 中向量在A 下的像仍在W 中,这就使得有可能不必在整个空间V 中来考虑A ,而只在不变子空间W 中考虑A ,即把A 看成是W 的一个线性变换,称为A 在不变子空间W 上引起的变换.为了区别起见,用符号A |W 来表示它;但是在很多情况下,仍然用A 来表示而不致引起混淆.必须在概念上弄清楚A 与A |W 的异同:A 是V 的线性变换, V 中每个向量在A 下都有确定的像;A |W 是不变子空间W 上的线性变换,对于W 中任一向量ξ,有(A |W )ξ=A ξ.但是对于V 中不属于W 的向量η来说,(A |W )η是没有意义的.例如,任一线性变换在它的核上引起的变换就是零变换,而在特征子空间0λV 上引起的变换是数乘变换0λ.如果线性空间V 的子空间W 是由向量组s ααα,,,21 生成的,即),,,(21s L W ααα =,则W 是A -子空间的充要条件为A 1α,A 2α,…, A s α全属于W .下面讨论不变子空间与线性变换矩阵化简之间的关系.1)设A 是维线性空间V 的线性变换,W 是V 的A -子空间.在W 中取一组基k εεε,,,21 ,并且把它扩充成V 的一组基n k k εεεεε,,,,,,121 +. (1)那么,A 在这组基下的矩阵就具有下列形状⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛++++++2311,,11,11,111,11110000A O A A a a a a a a a a a a a a nnk n n k k k knk k kk k n k k. (2) 并且左上角的k 级矩阵1A 就是A |W 在的基k εεε,,,21 下的矩阵.2) 设V 分解成若干个A -子空间的直和:s W W W V ⊕⊕⊕= 21.在每一个A -子空间i W 中取基),,2,1(,,,21s i iin i i =εεε (3)并把它们合并起来成为V 的一组基I .则在这组基下,A 的矩阵具有准对角形状⎪⎪⎪⎪⎪⎭⎫⎝⎛s A A A 21 (4) 其中),,2,1(s i A i =就是A |W 在基(3)下的矩阵.反之,如果线性变换A 在基I 下的矩阵是准对角形(4),则由(3)生成的子空间i W 是A -子空间.由此可知,矩阵分解为准对角形与空间分解为不变子空间的直和是相当的. 下面应用哈密尔顿-凯莱定理将空间V 按特征值分解成不变子空间的直和. 定理12 设线性变换A 的特征多项式为)(λf ,它可分解成一次因式的乘积s r s r r f )()()()(2121λλλλλλλ---=则V 可分解成不变子空间的直和s V V V V ⊕⊕⊕= 21其中{}V A V i r i i ∈=-=ξξελξ,0)(|.§8 若尔当(Jordan)标准形介绍由前面的讨论可知,并不是对于每一个线性变换都有一组基,使它在这组基下的矩阵成为对角形.下面先介绍一下,在适当选择的基下,一般的一个线性变换能化简成什么形状.定义8 形式为tt t J ⨯⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=λλλλλ1000010000010000),(的矩阵称为若尔当(Jordan)块,其中λ是复数.由若干个若尔当块组成的准对角矩阵称为若尔当形矩阵,其一般形状如⎪⎪⎪⎪⎪⎭⎫⎝⎛s A A A 21 (1) 其中ii kk i i i i i A ⨯⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛=λλλλ111, 并且s λλλ,,,21 中有一些可以相等.例如⎪⎪⎭⎫ ⎝⎛⎪⎪⎪⎪⎪⎭⎫⎝⎛⎪⎪⎪⎭⎫ ⎝⎛i i 10,0100001000010000,210021002都是若尔当块,而⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫ ⎝⎛41000004100000400000040000011000001是一个若尔当形矩阵.一级若尔当块就是一级矩阵,因此若尔当形矩阵中包括对角矩阵.在一个线性变换的若尔当标准形中,主对角线上的元素正是特征多项式的全部的根(重根按重数计算).定理13 设A 是复数域上线性空间V 的一个线性变换,则在V 中必定存在一组基,使A 在这组基下的矩阵是若尔当形矩阵.引理 n 维线性空间V 上的一个线性变换B 满足B k =ℴ,k 是某正整数,就称B 为V 上幂零线性变换.对幂零线性变换B ,V 中必有下列形式的一组元素作为基)0()0()0(,,211211121212121===---s k k k s k k k ss s s B B B B B B B B B αααααααααααα(2)于是B 在这组基下的矩阵)3(0110010100101021⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎪⎭⎫⎝⎛s k k k上述结果用矩阵表示就是:定理14 每个n 级复矩阵A 都与一个若尔当形矩阵相似.§9 最小多项式根据哈密尔顿—凯莱定理,任给数域P 上一个n 级矩阵A ,总可以找到数域P 上一个多项式)(x f ,使0)(=A f .如果多项式)(x f 使0)(=A f ,就称)(x f 以A 为根.当然,以为A 根的多项式是很多的,其中次数最低的首项系数为1的以A 为根的多项式称为A 的最小多项式.这一节讨论应用最小多项式来判断一个矩阵能否对角化的问题.引理1 矩阵A 的最小多项式是唯一的.引理2 设)(x g 是矩阵A 的最小多项式,那么)(x f 以A 为根的充要条件是)(x g 整除)(x f .由此可知,矩阵A 的最小多项式是A 的特征多项式的一个因式.例1 数量矩阵kE 的最小多项式为k x -,特别地,单位矩阵的最小多项式为1-x ,零矩阵的最小多项式为x .另一方面,如果A 的最小多项式是1次多项式,那么A 一定是数量矩阵.例2 设⎪⎪⎪⎭⎫⎝⎛=1111A求A 的最小多项式.例3 设⎪⎪⎪⎪⎪⎭⎫⎝⎛=⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=22111,21111B A . A 与B 的最小多项式都等于)2()1(2--x x ,但是它们的特征多项式不同,因此A 和B 不是相似的.引理3 设A 是一个准对角矩阵⎪⎪⎭⎫⎝⎛=21A A A , 并设1A 的最小多项式为)(1x g ,2A 的最小多项式为)(2x g ,那么A 的最小多项式为)(1x g ,)(2x g 的最小公倍式)](),([21x g x g .这个结论可以推广到A 为若干个矩阵组成的准对角矩阵的情形.即:如果⎪⎪⎪⎪⎪⎭⎫⎝⎛=s A A A A21, i A 的最小多项式为s i x g i ,,2,1,)( =,那么A 的最小多项式为)](,),(),([21x g x g x g s引理4 k 级若尔当块⎪⎪⎪⎪⎪⎭⎫⎝⎛=a a a J 11的最小多项式为k a x )(-.定理15 数域P 上n 级矩阵A 与对角矩阵相似的充要条件为A 的最小多项式是P 上互素的一次因式的乘积.推论 复数矩阵A 与对角矩阵相似的充要条件是A 的最小多项式没有重根.。
第七章线性变换
7.3 线性变换和矩阵
一、内容分布
7.3.1 线性变换的矩阵 7.3.2 坐标变换 7.3.3 矩阵唯一确定线性变换 7.3.4 线性变换在不同基下的矩阵—相似矩阵
二、教学目的:
1.熟练地求出线性变换关于给定基的矩阵A,以及给定n 阶矩阵A和基,求出关于这个基矩阵为A的线性变换.
2.由向量α关于给定基的坐标,求出σ(α)关于这个基的坐 标.
所以 是V的一个线性变换
令 k ,那么对于任意 a,b F 和任意 , V ,
(a b) k( (a b)) k(a ( ) b ()) ak ( ) bk () a( ) b().
所以kσ是V的一个线性变换.
线性变换的加法满足变换律和结合律,容易证明,对
于任意 , , L(v) ,以下等式成立:
记为 Ker( ),
即 Ker( ) { V | ( ) 0}.
定理7.1.2 设V和W是数域F向量空间,而是一个线
性映射,那么 :V W
(i) σ是满射 Im( ) W (ii) σ是单射 Ker( ) {0} 证明 论断(i)是显然的,我们只证论断(ii) 如果σ是单射,那么ker(σ)只能是含有唯一的零向量. 反过来设ker(σ) = {0}.
x1
(1
,
2
,,
n
)
x2
.
xn
因为σ是线性变换,所以
( ) x1 (1) x2 (2 ) xn (n )
(2)
x1
(
(1
),
(
2
),,
(
n
))
x2
.
xn
将(1)代入(2)得
x1
(
)
高等代数第七章 线性变换复习讲义
第七章线性变换一.线性变换的定义和运算1.线性变换的定义(1)定义:设V是数域p上的线性空间,A是V上的一个变换,如果对任意α,β∈V和k∈P都有A(α+β)=A(α)+A(β),A(kα)=kA(α)则称A为V的一个线性变换。
(2)恒等变换(单位变换)和零变换的定义:ε(α)=α,ο(α)=0,任意α∈V.它们都是V的线性变换。
(3)A是线性变换的充要条件:A(kα+lβ)=kA(α)+lA(β),任意α,β∈V,k,l∈P.2.线性变换的性质设V是数域P上的线性空间,A是V的线性变换,则有(1)A(0)=0;(2)A(-α)=-A(α),任意α∈V;(3)A(∑kiαi)=ΣkiA(α),α∈V,ki∈P,i=1,…,s;(4)若α1,α2,…,αs∈V,且线性相关,则A(α1),A (α2),…,A(αs)也线性相关,但当α1,α2,…,αs线性无关时,不能推出A(α1),A(α2),…,A(αs)线性无关。
3.线性变换的运算4.线性变换与基的关系(1)设ε1,ε2,…,εn是线性空间v的一组基,如果线性变换A和B在这组基上的作用相同,即Aεi=Bεi,i=1,2,…,n,则有A=B.(2)设ε1,ε2,…,εn是线性空间v的一组基,对于V中任意一组向量α1,α2,…,αn,存在唯一一个线性变换A使Aεi=αi,i=1,2,…,n.二.线性变换的矩阵1.定义:设ε1,ε2,…,εn是数域P上n维线性空间v的一组基,A是V中的一个线性变换,基向量的像可以被基线性表出Aε1=a11ε1+a21ε2+…an1εnAε2=a12ε1+a22ε2+…an2εn……Aεn= a1nε1+a2nε2+…annεn用矩阵表示就是A(ε1,ε2,…,εn)=(ε1,ε2,…,εn)A,其中a 11 a 12 …… a 1na 21 a 22 …… a 2nA= ……a n1 a n2 …… a nn称为A在基ε1,ε2,…,εn下的矩阵。
高等代数第七章线性变换

高等代数第七章线性变换一、定义:变换:线性空间V到自身的映射通常称为V的一个变换线性变换=线性映射+变换更准确地说线性变换的特点就是满足线性性以及定义域和陪域都是同一个线性空间*这里说的陪域是丘维生的高等代数里提出的一个概念,与值域的每一个自变量都有因变量相对应不同的是陪域包含自变量没有因变量相对应的情况这样解释是为了类比:同构映射=线性映射+双射也就是说同构映射的特点是满足线性性以及每一个自变量都有一个因变量相对应下面引出线性变换的准确定义线性变换:如果对于V中任意的元素 \alpha,\beta和数域P 中任意数k,都有\sigma(\alpha+\beta )=\sigma(\alpha)+\sigma(\beta) ,\sigma(k\alpha)=k\sigma(\alpha) 则称线性空间V的一个变换 \sigma 称为线性变换。
二、线性变换的矩阵所有线性变换的全体可以通过选取V的一组基与所有矩阵的全体建立一一对应的关系,将几何对象和代数对象建立转化。
只要取一组足够好的基,就可以得到足够好的矩阵。
某些特殊情况下,矩阵可以取成对角阵,就称线性变换可以对角化,不可对角的矩阵可以写成若尔当块的形式,则选取的基就为循环基,当做不到选取循环基时就只能上三角化或者下三角化。
三、矩阵的相似1.定义Ⅰ.①相似的定义: A,B\in P^{n\times n} ,若存在可逆矩阵 P ,使得 P^{-1}AP=B ,则称A与B是相似的②相似的标准型:若尔当标准型Ⅱ.类比合同(相抵):本质是初等变换①合同的定义: A,B\in P^{n\times n} 若存在可逆矩阵P ,使得 PAQ=B ,则称A与B是合同的②合同的标准型:PAQ=\left( \begin{array}{cc} E_{r}&0\\ 0&0 \end{array} \right),r=r(A),E(r)=\left( \begin{array}{cc} 1&&\\ &1 &\\ &...\\ &&1 \end{array} \right)_{r\times r}③性质:若 A\sim B ,则 \left| A \right|=\left| B \right| ,r(A)=r(B)若A\sim B ,则 A,B 的特征多项式相同,极小多项式相同若 A\sim B ,则 A'\sim B'*根据定义有 P^{-1}AP=B ,两边同时转置: P'A'(P')^{-1}=B' ,则 A'\sim B'若 A\sim B ,A可逆,则 A^{-1}\sim B^{-1}若 A\sim B ,则 A^{k}\sim B^{k}若 A\sim B , f(x)\in k[x] (f(x)是数域K上的多项式)则 f(A)\sim f(B) (A与B的多项式相似)*多项式的形式是 f(x)=x^{k}+x^{k-1}+...+x+m ,由A^{k}\sim B^{k} ,则 f(A)\sim f(B)若 A\sim B,则 A^{*}\sim B^{*} (A的伴随矩阵相似于B的伴随矩阵)四、矩阵的特征值和特征向量1.定义:对于矩阵A,若存在 x\ne0 (非零向量), x\inK^{n} ,s,t, Ax=\lambda x ,则称 \lambda 是 A 的一个特征值, x 是 \lambda 对应的特征向量2.求特征值、特征向量①求解特征多项式f(\lambda)=\left| \lambda E_{n} -A\right|=0\Rightarrow\lambda_{1},\lambda_{2},...,\lambda_{n} 为特征值②求 (\lambda_{i} E_{n} -A)x=0\Rightarrowx_{1},x_{2},...,x_{n} 为特征向量3.性质:若矩阵A的特征值为 \lambda_{1},...,\lambda_{n}① tr(A)=\lambda_{1}+...+\lambda_{n} ( tr(A) 为矩阵的迹:对角线元素之和为矩阵特征值之和)② \left| A\right|=\lambda_{1}\lambda_{2}...\lambda_{n}③哈密顿-凯莱定理:特征多项式一定是零化多项式f(\lambda)=\left| \lambda E_{n}-A \right|,f(A)=0*零化多项式: f(x)\in k[x] ( f(x) 是数域K上的多项式),若 f(A)=0 则称 f(x) 是 A 的零化多项式eg. f(x)=x^2-3x+1 则有 A^2-3A+E_{n}=0④若 f(A)=0\Rightarrow f(\lambda)=0eg. A^2-3A+E_{n}=0\Rightarrow\lambda^2-3\lambda+1=0则根据④若矩阵A的特征值为\lambda_{1},\lambda_{2},...,\lambda_{n}\Rightarrow A^{-1} 的特征值为\frac{1}{\lambda_{1}},\frac{1}{\lambda_{2}},...,\frac{ 1}{\lambda_{n}}\Rightarrow aA 的特征值为a\lambda_{1},a\lambda_{2},...,a\lambda_{n}\Rightarrow A^{k} 的特征值为\lambda_{1}^k,\lambda_{2}^k,...,\lambda_{n}^k五、矩阵A可对角化的判别办法① A_{n\times n} 可对角化 \Leftrightarrow n阶矩阵A有n个线性无关的特征向量设 \lambda_{1},\lambda_{2},...,\lambda_{s} 是两两不同的特征值②A可对角化 \LeftrightarrowdimV_{\lambda_{1}}+dimV_{\lambda_{2}}+...+dimV_{\lambd a_{s}}=n③(充分但不必要条件)A的特征多项式无重根 \Rightarrow A可对角化六、不变子空间定义:W是线性空间V的子空间,线性变换 \sigma:V\rightarrow V ,若 \sigma(W)\subseteq W ,则称W是\sigma 的不变子空间利用定义求不变子空间。
高等代数.第七章.线性变换.课堂笔记
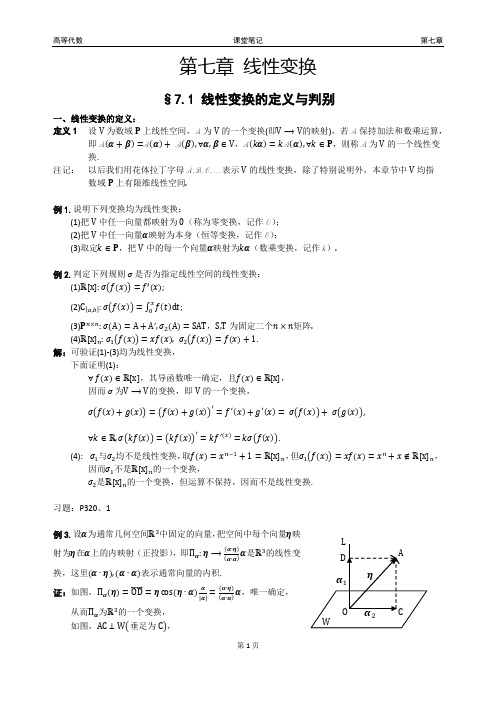
第七章 线性变换§7.1 线性变换的定义与判别一、线性变换的定义:定义1 设V 为数域P 上线性空间,A 为V 的一个变换(即V ⟶V 的映射),若A 保持加法和数乘运算,即A (α+β)=A (α)+ A (β),∀α,β∈V ,A (kα)=k A (α),∀k ∈P ,则称A 为V 的一个线性变换.注记: 以后我们用花体拉丁字母A,B,C,...表示V 的线性变换,除了特别说明外,本章节中V 均指数域P 上有限维线性空间.例1.说明下列变换均为线性变换: (1)把V 中任一向量都映射为0(称为零变换,记作0); (2)把V 中任一向量α映射为本身(恒等变换,记作E ); (3)取定k ∈P ,把V 中的每一个向量α映射为kα(数乘变换,记作k ).例2.判定下列规则σ是否为指定线性空间的线性变换: (1)ℝ,x -:σ(f (x ))=f′(x );(2)C ,a,b -: σ(f (x ))=∫f (t )dt x0;(3)P n×n : σ(A )=A +A ′,σ2(A )=SAT ,S,T 为固定二个n ×n 矩阵. (4)ℝ,x -n : σ1(f (x ))=xf (x ),σ2(f (x ))=f (x )+1. 解:可验证(1)-(3)均为线性变换,下面证明(1): ∀ f (x )∈ℝ,x -,其导函数唯一确定,且f (x )∈ℝ,x -,因而σ为V ⟶V 的变换,即V 的一个变换,σ(f (x )+g (x ))=(f (x )+g (x ))′=f ′(x )+g ′(x )= σ(f (x ))+ σ(g (x )), ∀k ∈ℝ,σ(kf (x ))=(kf (x ))′=kf ′(x )=kσ(f (x )).(4): σ1与σ2均不是线性变换,取f (x )=x n−1+1=ℝ,x -n ,但σ1(f (x ))=xf (x )=x n +x ∉ℝ,x -n , 因而σ1不是ℝ,x -n 的一个变换, σ2是ℝ,x -n 的一个变换,但运算不保持,因而不是线性变换.习题:P320、1例3.设α为通常几何空间ℝ3中固定的向量,把空间中每个向量η映射为η在α上的内映射(正投影),即Πα: η⟶(α∙η)(α∙α)α是ℝ3的线性变换,这里(α∙η),(α∙α)表示通常向量的内积.证:如图,Πα(η)=OD ⃗⃗⃗⃗⃗ =ηcos (η∙α)α|α|=(α∙η)(α∙α)α,唯一确定, 从而Πα为ℝ3的一个变换,如图,AC ⊥W(垂足为C),OCD LA Wα1α2η因此L 与W 为ℝ3的子空间且ℝ3=W ⊕L ,令 η=α1+α2,α1=OD⃗⃗⃗⃗⃗ =Πα(η),α2∈W , δ=β1+β2,β1=Πα(δ)∈L,β2∈W ,则η+δ=(α1+β1)+(α2+β2),α1+β1∈L,α2+β2∈W , 从而Πα(η+δ)=α1+β1=Πα(η)+Πα(δ), 同理,Πα(kη)=kΠα(η).二、线性变换的性质: 设A 为V 的线性变换,则: (1) A (0)=0, A (−α)=−A (α),∀α∈V ; (2) A (k 1α1+k 2α2+⋯+k t αt )=k 1A (α1)+k 2A (α2)+⋯+k t A (αt ); (3) A 把线性相关的向量组映射为线性相关的向量组(反之不真).2011-04-02A : V ⟶V 线性变换性质: (3) A 为V 中线性相关的向量组,映为V 中线性相关的向量组,即α1,α2,…,αs 相关⟹A (α1), A (α2),…, A (αs )相关;但A (α1), A (α2),…, A (αs )线性相关⇒α1,α2,…,αs 相关. 如A =0,∀ α∈V,α≠0, A (α)=0.(4)设α1,α2,…,αn 为V 的一个基,∀ α∈V,α=x 1α1+x 2α2+⋯+x n αn ⟹A (α)=A (x 1α1+x 2α2+⋯+x n αn ) 线性变换A 由V 中一个基中的像唯一确定;(5)设α1,α2,…,αn 为V 的一个基,则对V 中任一向量组β1,β2,…,βn 必存在一个线性变换 A : V ⟶V ,使得:A (αi )=βi ,1≤i ≤n ;证:作V ⟶V 映射:A (α)= x 1β1+x 2β2+⋯+x n βn ,其中:α=x 1β1+x 2β2+⋯+x n βn ,则A (αi )=βi ,1≤i ≤n ; 下证:A 为V 的线性变换:∀ α=x 1α1+x 2α2+⋯+x n αn ∈V,β=y 1α1+y 2α2+⋯+y n αn ∈V,A (α+β)= A .(x 1+y 1)α1+(x 2+y 2)α2+⋯+(x n +y n )αn /=(x 1+y 1)β1+(x 2+y 2)β2+⋯+(x n +y n )βn=(x 1β1+x 2β2+⋯+x n βn )+(y 1β1+y 2β2+⋯+y n βn ) = A (x 1α1+x 2α2+⋯+x n αn )+ A (y 1α1+y 2α2+⋯+y n αn )= A (α)+A (β)同理,∀k ∈P ,A (kα)=k A (α).§7.2 线性变换的运算为方便,引入记号:Hom (V,V ),它表示数域P 上线性空间V 的所有线性变换的集合。
高等代数第7章线性变换PPT课件

特征向量定义
对应于特征值m的非零向量x称为A的对应于特征值 m的特征向量。
设A是n阶方阵,如果存在数m和非零n维列向 量x,使得Ax=mx成立,则称m是A的一个特 征值。
求解方法
通过求解特征多项式f(λ)=|A-λE|的根得到特 征值,再代入原方程求解对应的特征向量。
特征多项式及其性质分析
特征多项式定义
量子力学
在量子力学中,特征值和特征向量用 于描述微观粒子的状态和能量级别。
图像处理
在图像处理中,特征值和特征向量可 以用于图像压缩和图像识别等任务。
经济学
在经济学中,特征值和特征向量可以 用于分析和预测经济系统的稳定性和 发展趋势。
04
线性变换对角化条
件及步骤
可对角化条件判断方法
判断矩阵是否可对角化
线性变换的性质与 矩阵性质对应
线性变换的性质如保持加法、 数乘等运算可以通过其对应的 矩阵性质来体现。例如,两个 线性变换的和对应两个矩阵的 和;线性变换的复合对应两个 矩阵的乘积等。
02
线性变换矩阵表示
法
标准基下矩阵表示法
定义
设V是n维线性空间,e1,e2,...,en 是V的一个基,T是V上的一个线 性变换,则T在基e1,e2,...,en下的 矩阵A称为T在基e1,e2,...,en下的 标准矩阵表示。
计算矩阵的高次幂
对于可对角化的矩阵A,可以利用对角化公式A=PDP^(-1)将A的高次幂转化为对角矩阵D的高次幂, 从而简化计算过程。
求解线性方程组
对于系数矩阵为可对角化矩阵的线性方程组,可以通过对角化将系数矩阵转化为对角矩阵,进而 简化方程组的求解过程。
计算行列式和逆矩阵
对于可对角化的矩阵A,其行列式值等于对角矩阵D的行列式值,逆矩阵可以通过对角化公式求得, 从而简化相关计算。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
… , k ,并且把它扩充成 V 的一组基
1 , 2 , … , k , k+1 , … , n .
(1)
A 那么, 在这组基下的矩阵就具有下列形状
a11 a1k
a1,k 1
a1n
ak1
akk
0 0
ak ,k 1 ak 1,k 1
例 2 A A 的值域与核都是 -子空间. A A A 按定义, 的值域 V 是 V 中的向量在 下 A 的像的集合,它当然也包含 V 中向量的像,所 A A 以 V 是 的不变子空间. A A 的核是被 变成零的向量的集合,核中向
量的像是零,自然在核中,因此核是不变子空间.
例 3 A B B 若线性变换 与 是可交换的,则
的 0 倍,仍然是 的一个倍数.
这说明 的倍数
A 构成一个一维 - 子空间.
显然, A 的属于特征值 0 的特征子空间
V0
也是 A 的不变子空间.
A A - 子空间的和与交还是 - 子空间.
四、 A 在不变子空间上引起的变换
A A 设 是线性空间 V 的线性变换,W 是 的不
变子空间. 由于 W 中向量在 A 下的像仍在 W 中,
向量 B ,则
A ( B ) = B (A子空间.
A A A 因为 的多项式 f ( ) 是和 交换的,所以
A A f ( ) 的值域与核都是 - 子空间.
A 这种 - 子空
间是经常碰到的.
例 4 任何一个子空间都是数乘变换的不子空
间. 这是由于,按定义子空间对于数量乘法是封闭
A 的核与值域都是 - 子空间.
在 B 的核 V0 中任取一向量 ,则 B ( A ) = (BA ) = (A B )
= A ( B ) = A 0 = 0 .
A B A 所以 在 下的像是零,即 V0 .
这就证
A 明了 V0 是 - 子空间.
在 B 的值域 BV 中任取一
这就使得有可能不必在整个空间 V 中来考虑 A ,
而只在不变子空间 W 中考虑 A ,即把 A 看成是
A W 的一个线性变换,称为 在不变子空间 W 上引
起的变换.
A 为了区别起见,用符号 | W 来表示;
但在不致引起混淆的情况下,仍然可用 A 来表示.
A A 必须在概念上弄清楚 和 | W 的异同: A A 是 V 的线性变换,V 中每个向量在 下都 有确定的像; A | W 是不变子空间 W 上的线性变
W = L(1 , 2 , … , s ) .
A 则 W 是 - 子空间的充分必要条件是
全属于 W .
A A A 1 , 2 , … , s
六、不变子空间与矩阵化简之间的关系
定理14 A 1) 设 是 n 维线性空间 V 的线性变
A 换, W 是 V 的 - 子空间.
在 W 中取一组基 1 , 2 ,
V = W1 W2 … Ws .
A 在每一个 - 子空间 Wi 中取基
i1, i2 , , ini
并把它们合并起来成为 V 的一组基 I .
(i 1,2, , s), (3)
则在这组
A 基下, 的矩阵具有准对角形状
A1
A2
As
节不变子空间
定义
举例
特征向量与一维不变子空间的关系
A在不变子空间上引起的变换
子空间为A-子空间的条件
不变子空间与矩阵化简之间的关系
空间的分解
一、定义
这一节我们再来介绍一个关于线性变换的重要
概念------不变子空间.
同时利用不变子空间的概念
来说明线性变换的矩阵的化简与线性变换的内在联
系. 这样,对上面的结果可以有进一步的了解.
仍然在 W 中.
A 1 , A 2 , … , A k
故它们可以通过 W 的基1 , 2 ,…, k
线性表示
A 1 = a111 + a212 + … + ak1k , A 2 = a121 + a222 + … + ak2k ,
…………
A k = a1k1 + a2k2 + … + akkk .
(4)
A 其中 Ai ( i = 1 , 2 , … , s ) 就是 |W 在基 (3) 下的
矩阵.
A 反之,如果线性变换 在基 I 下的矩阵是准 A 对角形 (4) ,则由 (3) 生成的子空间 Wi 是 - 子空
间.
证明 只证 1) ,因为2) 的证明与 1) 类似.
A 因为 W 是 - 子空间,所以像
定义 12 A 设 是数域 P 上线性空间 V 的线性
变换,W 是 V 的子空间.
A 如果 W 中的向量在 下
的像仍在 W 中,换句话说,对于 W 中任一向量
A 有 W, 我们就称 W 是 A 的 不变子空间,
A 简称
- 子空间.
二、举例
例 1 整个空间 V 和零子空间 { 0 },对于每个 A A 线性变换 来说都是 -子空间.
换,对于 W 中任一向量 ,有
A A ( | W ) = .
A 但是对于 V 中不属于 W 的向量 来说,( |W )
是没有意义的.
例如,任一 线性变换在它的核上引起的变换就
是零变换,而在特征子空间
乘变换0 .
V0 上引起的变换是数
五、子空间为 A - 子空间的条件
定理13 设 W 是线性空间 V 的子空间,且
akn ak 1,n
A1 O
A2 A3
.
(2)
0 0 an,k1 ann
A 并且左上角的 k 级矩阵 A1 就是 |W 在 W 的基
1 , 2 , … , k 下的矩阵.
A 2) 设 V 分解成若干个 - 子空间的直和:
的.
三、特征向量与一维不变子空间的关系
A 设 W 是一维 - 子空间, 是 W 中任何一个
非零向量,它构成 W 的基.
A 按 - 子空间的定义
A W,它必定是 的一个倍数:
A = 0 . A 这说明 是 的特征向量,而 W 是由 生成的
A 一维 - 子空间.
A 反过来,设 是 属于特征值 0 的一个特征 向量,则 以及它的任一倍数在 A 下的像是原像