PI的计算算法
pi控制 比例积分控制
PI控制(比例积分控制)1. 概述PI控制(Proportional Integral Control)是一种常用的反馈控制算法,用于控制系统中的误差。
它包含两个主要部分:比例控制和积分控制。
比例控制用于根据误差的大小来产生控制输出,而积分控制用于根据误差的累积值来产生控制输出。
通过结合这两个控制部分,PI控制可以有效地减小误差,并提高系统的稳定性和响应速度。
2. 比例控制比例控制是根据误差的大小来产生控制输出的一种控制方法。
其基本原理是,误差越大,控制输出就越大。
比例控制可以通过以下公式来表示:u(t) = Kp * e(t)其中,u(t)表示控制输出,Kp表示比例增益,e(t)表示误差。
比例增益Kp决定了控制输出对误差的敏感程度,较大的Kp会使系统更加敏感,但可能导致系统不稳定,较小的Kp会使系统更加稳定,但可能导致系统响应速度较慢。
比例控制的优点是简单且易于实现,但它也存在一些问题。
首先,比例控制无法消除稳态误差,即当系统达到稳定状态时,控制输出仍然存在一定的误差。
其次,比例控制对于系统参数的变化比较敏感,当系统参数发生变化时,控制输出可能会失效。
3. 积分控制积分控制是根据误差的累积值来产生控制输出的一种控制方法。
其基本原理是,误差累积越大,控制输出就越大。
积分控制可以通过以下公式来表示:u(t) = Ki * ∫e(t)dt其中,u(t)表示控制输出,Ki表示积分增益,∫e(t)dt表示误差的累积值。
积分增益Ki决定了控制输出对误差累积值的敏感程度,较大的Ki会使系统更加敏感,但可能导致系统不稳定,较小的Ki会使系统更加稳定,但可能导致系统响应速度较慢。
积分控制的优点是可以消除稳态误差,即当系统达到稳定状态时,控制输出可以完全消除误差。
其次,积分控制对于系统参数的变化相对不敏感,当系统参数发生变化时,积分控制可以自动调整控制输出。
4. PI控制PI控制是将比例控制和积分控制结合起来的一种控制方法。
pi的计算
5.圆周率的随机模拟计算方法 (蒙特卡罗法)
cs=0 n=500 %随机取点数 for i=1:n a=rand(1,2); if a(1)^2+a(2)^2<=1 cs=cs+1 end end 4*cs/n
1
0
1
依次取n 500,1000,3000,5000,50000取算得 圆周率的近似值分别为 3.18400000000000 3.10400000000000 3.13866666666667 3.12080000000000 3.14376000000000
1 ( 1)n (6n)! 13591409 545140134n 12 , 3 3 3 n n 0 ( 3n)!( n! ) 640320 2
并在1994年计算到了4044000000位.它的另一 种形式是
426880 10005 . (6n)!(545140134 n 13591409) 3 3n ( n ! ) ( 3 n )! ( 640320 ) n 0
例3 完成下面的实验任务
(1) 用MATLAB软件计算函数arctan x的Maclaurin 展开式,计算的近似值.
( 2)利用下面的等式计算 的值,并与( 1)比较.
2 1 2 ( 1)n1 (a ) (b) , 2, 2 8 n1 ( 2n 1) 12 n1 n
分析法时期
这一时期人们开始摆脱求多边形周长的繁难 计算,利用无穷级数或无穷连乘积来算 π 。 1593年,韦达给出
这一不寻常的公式是 π 的最早分析表达式。甚至 在今天,这个公式的优美也会令我们赞叹不已。它 表明仅仅借助数字2,通过一系列的加、乘、除和 开平方就可算出 π 值。
c语言无限计算圆周率的算法

c语言无限计算圆周率的算法用C语言编写一个无限计算圆周率的算法并不是一件简单的事情。
圆周率是一个无限不循环小数,它的计算需要使用一些特殊的算法。
在这篇文章中,我将向大家介绍一种常用的算法——蒙特卡洛方法,它可以用来估计圆周率的值。
蒙特卡洛方法是一种基于统计学原理的方法,它通过随机抽样来估计一个数值。
在计算圆周率的问题中,我们可以通过随机点的分布情况来估计圆的面积,从而得到圆周率的值。
我们需要明确一下圆的定义。
在二维平面上,一个点到原点的距离小于等于半径的点构成了一个圆。
而一个点到原点的距离等于半径的点则构成了圆的边界。
我们可以通过生成随机点,并判断这些点是否在圆的内部来估计圆的面积。
具体的算法如下:1. 设置一个计数器变量count,用来计算在圆内的点的个数。
2. 设置一个总点数的变量total,用来记录生成的总点数。
3. 生成一个随机点(x, y),其中x和y的范围都是在圆的半径之内。
4. 计算点到原点的距离d = sqrt(x^2 + y^2)。
5. 如果d小于等于半径,则将count加1。
6. 将total加1。
7. 重复步骤3-6,直到达到指定的总点数。
8. 计算圆的面积的估计值area = 4 * count / total。
9. 计算圆周率的估计值pi = area / 半径。
这个算法的原理是,当我们生成的点越多时,圆的面积的估计值会越来越接近真实值。
而圆的面积与圆周率的关系是area = pi * 半径^2,所以通过计算估计的圆的面积,我们可以得到圆周率的估计值。
在C语言中,我们可以使用rand()函数来生成随机数,使用sqrt()函数来计算平方根。
下面是一个简单的示例代码:```c#include <stdio.h>#include <stdlib.h>#include <math.h>int main() {int count = 0;int total = 0;int radius = 1;while (1) {double x = (double)rand() / RAND_MAX * radius;double y = (double)rand() / RAND_MAX * radius;double d = sqrt(x * x + y * y);if (d <= radius) {count++;}total++;double area = 4.0 * count / total;double pi = area / radius;printf("估计的圆周率值:%.10f\n", pi);}return 0;}```在这段代码中,我们使用一个无限循环来不断生成随机点,并计算圆周率的估计值。
Boost电路PI参数计算
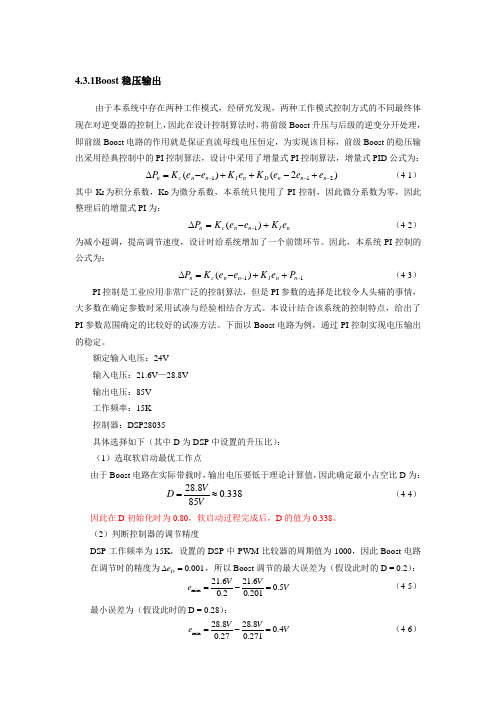
4.3.1Boost 稳压输出由于本系统中存在两种工作模式,经研究发现,两种工作模式控制方式的不同最终体现在对逆变器的控制上,因此在设计控制算法时,将前级Boost 升压与后级的逆变分开处理,即前级Boost 电路的作用就是保证直流母线电压恒定,为实现该目标,前级Boost 的稳压输出采用经典控制中的PI 控制算法,设计中采用了增量式PI 控制算法,增量式PID 公式为:)2()(211---+-++-=∆n n n D n I n n c n e e e K e K e e K P (4-1)其中K I 为积分系数,K D 为微分系数,本系统只使用了PI 控制,因此微分系数为零,因此整理后的增量式PI 为:n I n n c n e K e e K P +-=∆-)(1 (4-2)为减小超调,提高调节速度,设计时给系统增加了一个前馈环节。
因此,本系统PI 控制的公式为:11)(--++-=∆n n I n n c n P e K e e K P (4-3)PI 控制是工业应用非常广泛的控制算法,但是PI 参数的选择是比较令人头痛的事情,大多数在确定参数时采用试凑与经验相结合方式。
本设计结合该系统的控制特点,给出了PI 参数范围确定的比较好的试凑方法。
下面以Boost 电路为例,通过PI 控制实现电压输出的稳定。
额定输入电压:24V输入电压:21.6V —28.8V输出电压:85V工作频率:15K控制器:DSP28035具体选择如下(其中D 为DSP 中设置的升压比):(1)选取软启动最优工作点由于Boost 电路在实际带载时,输出电压要低于理论计算值,因此确定最小占空比D 为:338.0858.28≈=VV D (4-4) 因此在D 初始化时为0.80,软启动过程完成后,D 的值为0.338。
(2)判断控制器的调节精度DSP 工作频率为15K ,设置的DSP 中PWM 比较器的周期值为1000,因此Boost 电路在调节时的精度为0.001D e ∆=,所以Boost 调节的最大误差为(假设此时的D = 0.2):max 21.621.60.50.20.201V V e V =-= (4-5) 最小误差为(假设此时的D = 0.28): min 28.828.80.40.270.271V V e V =-= (4-6)即在输入直流电压波动范围内输出稳定时,调节误差在0.4V —0.5V 的范围内。
多种方法计算Pi并且精确度比较

多种⽅法计算Pi并且精确度⽐较多种⽅法计算圆周率并⽐较精确度【摘要】本⽂介绍了多种⽅法求圆周率的近似值并对各种⽅法进⾏精确度的⽐较得出具体情况选择的⽅法,且通过mathematica 编程模拟实验过程,得出各种⽅法的特点。
【关键字】圆周率数值积分法泰勒级数法蒙特卡罗法拉马努⾦公式法0.引⾔平⾯上圆的周长与直径之⽐是⼀个常数,称为圆周率,记作π。
在很长的⼀段时期,计算π的值是数学上的⼀件重要的事情。
有数学家甚⾄说:“历史上⼀个国家所得的圆周率的准确程度,可以作为衡量⼀个国家当时数学发展的⼀⾯旗帜。
”⾜以见圆周率扮演的是⾓⾊是如此举⾜轻重。
π作为经常使⽤的数学常数,它的计算已经持续了2500多年了,到今天都依然在进⾏着,中间涌现出许多的计算⽅法,它们都各有千秋,在此,我们选择⼏种较典型的⽅法,包括数值积分法,泰勒级数法,蒙特卡罗法,韦达公式法,拉马努⾦公式法以及迭代法来和⼤家⼀起体验π的计算历程,同时利⽤mathematica 通过对各种⽅法作精确度的⽐较得出选择的优先顺序,为相关的理论研究提供⼀定的参考价值。
1.数值积分法以单位圆的圆⼼为原点建⽴直⾓坐标系,则单位圆在第⼀象限内的部分G 是⼀个扇形,由曲线y=211x+(x ∈[0,1])及两条坐标轴围成,它的⾯积S=4π。
算出了S 的近似值,它的4倍就是π的近似值。
(41112π=+?dx x )⽤⼀组平⾏于y 轴的直线x=i x (1≤i ≤n-1,a=0x <1x <2x <...地看作抛物线,就得到⾟普森公式。
梯形公式:S ≈]2...[10121y y y y y n ab n +++++-- ⾟普森公式:S ≈)]...(4)...(2)[(62123211210--+++++++++-n n n y y y y y y y y n abMathematica 程序如下:n=1000;y[x_]:=4/(1+x^2);s1=(Sum[y[k/n],{k,1,n-1}]+(y[0]+y[1])/2)/n;s2=(y[0]+y[1]+2*Sum[y[k/n],{k,1,n-1}]+4*Sum[y[(k-1/2)/n],{k,1,n}])/(6*n); Print[{N[s1,20],N[s2,20],N[Pi,30]}]注:以上s1,s2分别是⽤梯形共识和⾟普森公式计算出的π。
python基于韦达公式的圆周率计算方法
1.概述在计算机编程领域,圆周率(π)是一个重要的数学常数,它具有无限不循环小数的性质。
计算圆周率一直是一个挑战性的问题,而Python 作为一种流行的编程语言,也有许多方法来计算圆周率。
本文将重点讨论基于韦达公式的圆周率计算方法,并将深入探讨这个主题。
2.韦达公式的基本原理韦达公式是一个古老的圆周率计算方法,它是由印度数学家韦达在7世纪发现的。
该公式基于圆的周长和直径之间的关系,即圆的周长等于直径乘以π。
根据韦达公式,可以通过计算圆的周长和直径的比值来近似计算π的值。
3.基于韦达公式的Python代码实现下面是一个简单的基于韦达公式的Python代码实现:```pythonimport mathdef calculate_pi(n):pi_approx = 0for k in range(1, n+1):pi_approx += 1 / (k**2)pi_approx = math.sqrt(pi_approx * 6)return pi_approx```这段代码使用了韦达公式的思想,通过对无穷级数的累加来近似计算π的值。
在这个示例中,n代表累加的项数,项数越多,计算出的π值越精确。
4.深入探讨基于韦达公式的圆周率计算方法在实际应用中,通过基于韦达公式的方法计算π的值是非常有挑战性的。
因为无穷级数的累加是一个耗时的计算过程,而且需要大量的计算资源。
另外,随着项数的增加,精确度的提高并不是线性增长的,这也限制了韦达公式在实际计算中的应用。
然而,基于韦达公式的圆周率计算方法依然具有重要的理论意义,它为我们提供了一种从数学角度去理解π的方法,而且在一些特定的数值计算中,也可以提供一个精确度较高的近似值。
5.总结和展望通过本文的介绍,我们深入探讨了基于韦达公式的圆周率计算方法,并通过Python代码实现了这一方法。
我们也意识到了这一方法在实际应用中的限制,但依然具有重要的理论意义。
在未来,我们可以进一步探讨其他计算π的方法,比如蒙特卡洛方法和数值积分方法,并且通过对比不同方法的优缺点,来全面理解圆周率的计算。
亲权指数的计算

三、STR分型技术亲权关系鉴定的标准
单击此处添加大标题内容
三联体判断
不对实验室的要求和分析技术体系的要求进行总结,只总结STR分型结果。 STR 分型结果符合下述条件者可做出否定亲生关系的结论: 出现4个或更多矛盾 STR 基因座 累计PI值<1/1000
三联体判断
01
STR分型结果符合下述条件者可以描述为肯定或支持亲生关系:
添加标题
二联体判断
STR 分型结果符合下述条件者可做出否定亲生关系的结论:
出现3个或更多矛盾 STR 基因座
单击此处添加小标题
累计PI值<1/1000
单击此处添加小标题
二联体判断
STR分型结果符合下述条件者可以描述为肯定或支持亲生关系:
起码检测18个STR基因座争议父与孩子之间没有发现矛盾基因座;
添加标题
02
起码检测15个STR基因座争议父与孩子之间没有发现矛盾基因座;
添加标题
03
或检测19个STR基因座只发现1个矛盾基因座;
添加标题
04
或检测28个STR基因座只发现2个矛盾基因座;
添加标题
05
或检测35个STR基因座只发现3个矛盾基因座;
添加标题
06
累计PI值≥10000,(亲权概率W≥0.9999假定前概率=0.5)
PQ
PQ
QR
PI=1/[2(p+q)]
PQ
PQ
PQ
PI=1/(p+q)
例如第一种情况时 X=0.5*0.5+0*0 Y=0.5*q+0*p 故PI=1/(2q)
2.父权指数的计算
2.2二联体父权指数的计算 PI=X/Y,母亲没有参加检验,基因型不确定,看成一个随机个体。
圆周率的由来圆周率(Pi)是圆的周长与直径的比值,一般用希腊字母π

圆周率的由来圆周率(Pi)是圆的周长与直径的比值,一般用希腊字母π表示,是一个在数学及物理学中普遍存在的数学常数。
π也等于圆形之面积与半径平方之比。
是精确计算圆周长、圆面积、球体积等几何形状的关键值。
在分析学里,π可以严格地定义为满足sin x = 0的最小正实数x。
圆周率用字母(读作pài)表示,是一个常数(约等于3.141592654),是代表圆周长和直径的比值。
它是一个无理数,即无限不循环小数。
在日常生活中,通常都用3.14代表圆周率去进行近似计算。
而用十位小数3.141592654便足以应付一般计算。
即使是工程师或物理学家要进行较精密的计算,充其量也只需取值至小数点后几百个位。
这个符号,亦是希腊语περιφρεια (表示周边,地域,圆周等意思)的首字母。
1706年英国数学家威廉·琼斯(William Jones ,1675-1749)最先使用“π”来表示圆周率。
1736年,瑞士大数学家欧拉也开始用表示圆周率。
从此,便成了圆周率的代名词。
要注意不可把和其大写Π混用,后者是指连乘的意思。
公式编辑圆周率()一般定义为一个圆形的周长()与直径()之比:。
由相似图形的性质可知,对于任何圆形,的值都是一样。
这样就定义出常数。
第二个做法是,以圆形半径为边长作一正方形,然後把圆形面积和此正方形面积的比例订为,即圆形之面积与半径平方之比。
定义圆周率不一定要用到几何概念,比如,我们可以定义为满足的最小正实数。
这里的正弦函数定义为幂级数历史发展:实验时期一块古巴比伦石匾(约产于公元前1900年至1600年)清楚地记载了圆周率= 25/8 = 3.125。
[4] 同一时期的古埃及文物,莱因德数学纸草书(Rhind Mathematical Papyrus)也表明圆周率等于分数16/9的平方,约等于3.1605。
[4] 埃及人似乎在更早的时候就知道圆周率了。
英国作家John Taylor (1781–1864) 在其名著《金字塔》(《The Great Pyramid: Why was it built, and who built it?》)中指出,造于公元前2500年左右的胡夫金字塔和圆周率有关。
圆周率

简介圆周率(π)是一个常数(约等于3.141592654),是代表圆周长和直径的比值。
它是一个无理数,即是一个无限不循环小数。
但在日常生活中,通常都用3.14来代表圆周率去进行计算,即使是工程师或物理学家要进行较精密的计算,也只取值至小数点后约20位。
π(读作“派”)是第十六个希腊字母,本来它是和圆周率没有关系的,但大数学家欧拉在一七三六年开始,在书信和论文中都用π来代表圆周率。
既然他是大数学家,所以人们也有样学样地用π来表示圆周率了。
但π除了表示圆周率外,也可以用来表示其他事物,在统计学中也能看到它的出现。
π=Pai(π=Pi)古希腊欧几里德《几何原本》(约公元前3世纪初)中提到圆周率是常数,中国古算书《周髀算经》(约公元前2世纪)中有“径一而周三”的记载,也认为圆周率是常数。
历史上曾采用过圆周率的多种近似值,早期大都是通过实验而得到的结果,如古埃及纸草书(约公元前1700)中取pi=(4/3)^4≒3.1604 。
第一个用科学方法寻求圆周率数值的人是阿基米德,他在《圆的度量》(公元前3世纪)中用圆内接和外切正多边形的周长确定圆周长的上下界,从正六边形开始,逐次加倍计算到正96边形,得到(3+(10/71))<π<(3+(1/7)),开创了圆周率计算的几何方法(亦称古典方法,或阿基米德方法),得出精确到小数点后两位的π值。
中国数学家刘徽在注释《九章算术》(263年)时只用圆内接正多边形就求得π的近似值,也得出精确到两位小数的π值,他的方法被后人称为割圆术。
他用割圆术一直算到圆内接正192边形,得出π≈根号10 (约为3.16)。
南北朝时代著名数学家祖冲之进一步得出精确到小数点后7位的π值(约5世纪下半叶),给出不足近似值3.1415926和过剩近似值3.1415927,还得到两个近似分数值,密率355/113和约率22/7。
他的辉煌成就比欧洲至少早了1000年。
其中的密率在西方直到1573才由德国人奥托得到,1625年发表于荷兰工程师安托尼斯的著作中,欧洲不知道是祖冲之先知道密率的,将密率错误的称之为安托尼斯率。
pi的计算

f ( x i 1 ) f ( x i ) ( ( xi xi 1 )) 2 i 1
当区间划分为n等分时
b
s3
s4
o
x2 x3
b x
——trapz(x,y)
n 1 h f ( xi ) f (b)) , a f ( x )dx Tn 2 ( f (a ) 2 i 1 ba 其中 h , xk a kh k 1,2,, n 1 n
出:
1706年,英国天文学教授John Machin(梅钦) 发现了下面的公式
1 1 16 arctan 4 arctan , 5 239
梅钦公式
并利用下面公式计算到了圆周率的100位.
2 n1 x3 x5 x7 x n1 arctan x x 1 3 5 7 2n 1
虽然计算π的精确值已经没有实际意义了,但是研究它 的计算方法及相应算法的收敛速度还是很有必要的。
1914年,印度数学家Srinivasa Ramanujan发表了 下面的公式:
9801 (4n)! (1103 26390n) 2 2 4n 4 4n 4 ( n ! ) 99 n 0
在中国
祖冲之: 在刘徽研究的基础上,进一步地发展, 经过既漫长又烦琐的计算,一直算到圆内接正 24576边形,而得到一个结论: 3.1415926 < π < 3.1415927 同时得到π 的两个近似分数:约率为22/7; 密率为355/113。 他算出的 π 的8位可靠数字,不但在当时是最精 密的圆周率,而且保持世界记录九百多年。以致 于有数学史家提议将这一结果命名为“祖率”。
无理数 和e的近似计算
西安交通大学 数学与统计学院 赵小艳
Boost电路PI参数计算
4.3.1Boost 稳压输出由于本系统中存在两种工作模式,经研究发现,两种工作模式控制方式的不同最终体现在对逆变器的控制上,因此在设计控制算法时,将前级Boost 升压与后级的逆变分开处理,即前级Boost 电路的作用就是保证直流母线电压恒定,为实现该目标,前级Boost 的稳压输出采用经典控制中的PI 控制算法,设计中采用了增量式PI 控制算法,增量式PID 公式为:)2()(211---+-++-=∆n n n D n I n n c n e e e K e K e e K P (4-1)其中K I 为积分系数,K D 为微分系数,本系统只使用了PI 控制,因此微分系数为零,因此整理后的增量式PI 为:n I n n c n e K e e K P +-=∆-)(1 (4-2)为减小超调,提高调节速度,设计时给系统增加了一个前馈环节。
因此,本系统PI 控制的公式为:11)(--++-=∆n n I n n c n P e K e e K P (4-3)PI 控制是工业应用非常广泛的控制算法,但是PI 参数的选择是比较令人头痛的事情,大多数在确定参数时采用试凑与经验相结合方式。
本设计结合该系统的控制特点,给出了PI 参数范围确定的比较好的试凑方法。
下面以Boost 电路为例,通过PI 控制实现电压输出的稳定。
额定输入电压:24V输入电压:21.6V —28.8V输出电压:85V工作频率:15K控制器:DSP28035具体选择如下(其中D 为DSP 中设置的升压比):(1)选取软启动最优工作点由于Boost 电路在实际带载时,输出电压要低于理论计算值,因此确定最小占空比D 为:338.0858.28≈=VV D (4-4) 因此在D 初始化时为0.80,软启动过程完成后,D 的值为0.338。
(2)判断控制器的调节精度DSP 工作频率为15K ,设置的DSP 中PWM 比较器的周期值为1000,因此Boost 电路在调节时的精度为0.001D e ∆=,所以Boost 调节的最大误差为(假设此时的D = 0.2):max 21.621.60.50.20.201V V e V =-= (4-5) 最小误差为(假设此时的D = 0.28): min 28.828.80.40.270.271V V e V =-= (4-6)即在输入直流电压波动范围内输出稳定时,调节误差在0.4V —0.5V 的范围内。
实验5 蒙特卡罗法求PI及排序算法

浙江大学城市学院实验报告课程名称多核与并行程序设计实验项目名称实验五蒙特卡罗法求PI及排序算法学生姓名专业班级学号实验成绩指导老师(签名)日期【实验环境】硬件平台:联想4核,4GZ内存编译器:Microsoft Visual Studio C++ 6.0操作系统:Windows 2003 server sp2测试数据集合:由随机数函数产生的数据集合【实验1】一、问题描述蒙特卡洛算法可理解为通过大量实验,模拟实际行为,来收集统计数据。
本例中,算法随机产生一系列点,模拟这些点落在如下图所示的正方形区域内的情况。
其几何解释如下11图1如图1所示,正方形边长为1,左下顶点与原点重合,两边分别与x,y轴重合。
曲线为1/4圆弧,圆心位于原点,与正方形左下定点重合,半径为1。
正方形面积S1=1,圆弧内面积S2=ππ41412=r。
算法模拟大量点随机落在此正方形区域内,落在圆弧内的点的数量(n2)与点的总数(n1)的比例与面积成正比关系。
即π42121==S S n n (1) 由此可得124n n =π (2)因此,只要计算出落在圆弧内的点的数量在点总数中所占的比例,就能求出π的值。
由图1可知,所有点均落在正方形范围内,因此点的x 坐标满足10≤≤x 。
又,当点落在圆弧范围内,则点的二维坐标关系满足122≤+y x 。
检验每一个点是否满足此关系即可判定改点是否落在圆弧内。
二、串行算法描述本项目中使用了标准C 语言库中的产生随机数函数。
该函数原型为:int rand( void );此函数产生随机数列,每次调用时均返回0到RAND_MAX 之间的一个整数。
void srand( unsigned int seed );此函数为rand ()函数所生成的伪随机数序列设置起始点,使之产生不同的伪随机数。
算法:产生2n 个随机数据,范围[0,1],对每个数据点计算其坐标是否满足122≤+y x ,统计满足此关系的点的数量count ,则 n count4=π三、并行算法3.1 并行算法描述算法步骤:1、确定需要产生的点的个数n ,参与运行的处理器数m ;2、对每一个处理器,生成两个随机数x ,y ,范围[0,1];3、判断两个随机数x ,y 是否满足122≤+y x ;4、若满足,则变量COUNT i++;5、重复步骤2-4,直至每个处理器均生成n/m个随机点;6、收集COUNT i的值,并累加至变量COUNT中,此即为随机点落在圆弧内的数量;7、通过(2)式计算 的值。
求pi的三种算法

求pi的三种算法
第一种方法:蒙特卡罗法
这种方法的思想是计算机随机模拟方法,是一种基于“随机数”的算法。
通过计算落在单位圆内的点与落在正方形内的点的比值求pi.
程序:
k=0;
n=20000;
for i=1:n
a=rand(1,2);
if(a(1))^2+(a(2))^2<1
k=k+1;
end
end
p=4*k/n
第二种方法:泰勒级数法
这种方法的思想是利用泰勒公式的展开式:
arctan1=pi/4=1-1/3+1/5……
程序:
p=vpa(4*z,5000)
第三种方法:积分法
这种方法的思想是利用1/(1+x^2)的积分为arctanx.再利用积分的基本步骤:分割,求和,取极限。
将函数图形与x轴围成的面积尽可能的细分,然后求和,得出一个非常近似的值。
程序:
a=0;b=1;n=10000;
h=(b-a)/n;
s=0;
for i=1:n
x(i)=a+i*h;
y(i)=1/(1+x(i)^2);
s=s+y(i);
end
s*h*4;
vpa(s*h*4,10)
总结:
由以上三种方法可知泰勒级数法所求精度最高,积分法如果细分的方法恰当的话,精度也会很高。
而蒙特卡罗法的随机次数越多当然精度越高。
二位电动云台的pi算法

二位电动云台的pi算法"二位电动云台的PI算法" 是一种用于控制二维电动云台的算法,旨在实现云台在水平方向和垂直方向上的平稳运动。
本文将逐步解释PI算法的原理、应用和实现,并讨论其优缺点和可能的改进。
第一步:问题介绍二位电动云台是一个常见的机械结构,通常用于相机云台、望远镜等设备。
它可以实现在水平和垂直方向上的旋转,以便进行精确定位和平滑跟踪。
但是,云台在运动过程中可能面临准确性和稳定性的挑战,需要一种控制算法来解决这些问题。
PI算法是一种常用的控制算法,通过对云台电机和反馈信号进行调节,可以实现精确的控制。
第二步:PI控制算法的原理PI控制算法基于比例和积分概念,其中比例项(P项)用于处理当前误差,而积分项(I项)用于处理过去误差的积累。
公式如下:输出值= P项+ I项比例项(P项):根据当前误差,乘上一个比例系数Kp,得到P项的值。
P项的作用是根据误差的大小直接调整输出值,使得输出与误差成正比。
积分项(I项):将历史误差累积起来,通过乘以一个积分系数Ki,得到I 项的值。
I项的作用是根据误差的累积来调整输出值,以消除由于误差积累而导致的系统漂移。
第三步:PI控制算法的应用PI控制算法在二位电动云台上的应用非常广泛。
该算法可以精确地控制云台转动的速度和位置,实现平稳的运动和跟踪功能。
例如,在相机云台上,通过PI算法可以实现精确的水平和垂直拍摄角度,使摄影师能够获得稳定而清晰的画面。
第四步:PI控制算法的实现要实现PI控制算法,首先需要获取反馈信号。
在二位电动云台上,通常使用编码器或位置传感器来获取云台的当前位置。
然后,根据预设的目标位置和当前位置计算误差。
接下来,根据比例系数Kp和积分系数Ki,计算P项和I项。
将P项和I 项相加得到输出值,该输出值将作为电机的控制信号。
最后,通过将控制信号输入到电机中,调整云台的位置和速度。
在此过程中,根据反馈信号更新误差和累积误差,并重新计算输出值。
电压电流环pi算法
电压电流环pi算法
摘要:
1.引言
2.电压电流环pi 算法的基本原理
3.电压电流环pi 算法的实现
4.电压电流环pi 算法的应用领域
5.总结
正文:
电压电流环pi 算法是一种广泛应用于电力电子和电机控制领域的控制策略。
它是一种模拟连续控制系统的闭环控制算法,主要通过电压和电流两个环路的反馈控制实现对电机或负载的精确控制。
电压电流环pi 算法的基本原理是,根据系统的开环传递函数,设计一个比例- 积分(PI)控制器,通过电压环和电流环的反馈,分别控制电机的输入电压和电流,从而实现对电机的速度、转矩等控制目标。
电压电流环pi 算法的实现主要包括以下步骤:
1.确定控制目标:根据电机的速度、转矩等控制要求,确定比例增益Kp 和积分时间常数Ti。
2.计算控制输出:根据电机的输入电压和电流,以及设定的比例增益和积分时间常数,计算出电压环和电流环的控制输出。
3.反馈控制:将电压环和电流环的控制输出分别作用于电机的输入端,实现对电机电压和电流的控制。
4.系统建模:根据电机的特性和工作环境,建立系统的动态模型,用于分析系统的稳定性、响应速度等性能指标。
电压电流环pi 算法的应用领域非常广泛,包括:
1.交流电机控制:如感应电机、永磁同步电机等。
2.直流电机控制:如直流电机、无刷直流电机等。
3.电力电子变换器控制:如整流器、逆变器、斩波器等。
4.功率因数校正器控制:如静止无功发生器、动态电压恢复器等。
总之,电压电流环pi 算法是一种经典的闭环控制策略,通过电压和电流环路的反馈控制,实现对电机或负载的精确控制。
SparkPi的编程计算

SparkPi的编程计算Pi的计算⽅式有很多,本⽂主要是通过Spark在概论统计的⽅法对Pi进⾏求解:算法说明: 在边长为R的正⽅形中,其⾯积为R^2,⽽其内接圆的⾯积为pi * R^2 /4 ,圆的⾯积与正⽅形的⾯积⽐为 Pi / 4 .存在⼀个点,随机的往这个正⽅形中掉落,⽽且这个点掉落到正⽅形的每个位置的概率是相同的,当⽆数多个点掉落在这个正⽅形时,那么这个点在圆的个数x与在正⽅形上的个数y应该为圆的⾯积与正⽅形的⾯积之⽐Pi /4。
scala编程算法:import org.apache.spark.sql.SparkSessionimport scala.math.randomobject SparkPi {def main(args: Array[String]): Unit = {//step1:创建spark线程val spark= SparkSession.builder.appName("Spark Pi").getOrCreate()//step2: 设置参数val slices = if(args.length>0) args(0).toInt else 2 //通过输⼊的值判断分⽚的个数,主要是设定线程数val n = math.min(100000L * slices, Int.MaxValue).toInt //设定投递的次数,也就是设定点的个数。
当点的个数越⼤,求出的pi值越精确//step3: 逻辑判断,并统计落在圆这个⾯积中的次数val count: Int = spark.sparkContext.parallelize(1 until n, slices).map {i =>val x = random * 2 - 1val y = random * 2 - 1if (x * x + y * y <= 1) 1 else 0 //定义随机点,判断点是否落在圆内,若不在,则为0,否则则取1}.reduce(_ + _)//通过公式pi = 4.0 * (圆中的次数)/ 总的次数println(s"Pi is roughly ${4.0 * count/(n-1)}")spark.stop()}。
pi的无穷表达式

7 1 13 13 3 19 135 3 ) 3 1 ( )3 2 ( ( ) … 4 2 4 2 4 4 2 4 6 4
16 5 47 1 3 89 13 3 131 135 3 ( ) 2( ) 3 ( ) … 64 2 64 24 64 246
五、其他关于π的一些表达式
1.
ex dx
2
2.斯特林公式
n n ! 2 n ( ) n e
3. 欧拉公式
e i 1 0
------------------------------------------------------e=d%a;continue; } if(e+d/a<10) printf("000%d",e+d/a); else if(e+d/a<100) printf("00%d",e+d/a); else if(e+d/a<1000) printf("0%d",e+d/a); else printf("%d",e+d/a); e=d%a; } printf("\n"); getch(); } ------------------------------------------------------
pi控制传递函数

pi控制传递函数
Pi控制器是一种常用的控制算法,可以在工业自动化中对各种过程进行控制。
它是一种比比例控制器更复杂的控制算法,可以解决比例控制器无法解决的问题。
Pi控制器的传递函数是一个简单的数学模型,用于描述控制器的输入和输出之间的关系。
它通常表示为:
G(s) = Kp + Ki/s
其中,s是复变量,Kp是比例增益,Ki是积分增益。
比例增益控制的是当前误差,而积分增益则控制过去的误差积累。
Pi控制器通过这两个参数的调整,可以实现更加精确的控制。
Pi控制器的传递函数可以通过多种方法进行设计和调整。
其中最常见的方法是基于试错法,即通过试验和调整参数来找到最佳的控制方案。
此外,还有一些基于数学建模和优化算法的设计方法,可以更加快速和准确地找到最佳的控制方案。
总之,Pi控制器是一种非常有用的控制算法,可以在各种工业过程中实现更加精确和稳定的控制。
了解其传递函数和设计方法,对于掌握控制技术和应用具有重要意义。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
上机7:文件操作一、问题:古人计算pi (3.1415926535 89793 23846……),一般是用割圆法。
即用圆的内接或外切正多边形来逼近圆的周长。
大约公元前1200年,中国人计算到小数点后1位;Archimedes 在公元前250年用正96边形得到pi 小数点后3位的精度;公元263年,刘徽用正3072边形计算到小数点后5位 ;公元480年,祖冲之计算到小数点后7位;Ludolph Van Ceulen 在1609年用正262边形得到了35位精度;1706年,John Machin 计算到小数点后100位。
1874年,William Shanks 计算到小数点后707位(527位正确)。
这种基于几何的算法计算量大,速度慢,吃力不讨好。
1973年Guilloud & Bouyer 用 CDC 7600计算机计算到1,001,250位;1989年Kanada & Tamurar 用 HITACHI S-820/80计算机计算到1,073,741,799位;1999年Takahashi & Kanada 用 HITACHI SR8000计算机计算到206,158,430,000位;pi 的最新计算纪录由两位日本人Daisuke Takahashi 和Yasumasa Kanada 所创造。
他们在日本东京大学的IT 中心,以Gauss-Legendre 算法编写程序,利用一台每秒可执行一万亿次浮点运算的超级计算机,从日本时间1999年9月18日19:00:52起,计算了37小时21分04秒,得到了pi 的206,158,430,208(3*236)位十进制精度,之后和他们于1999年6月27日以Borwein 四次迭代式计算了46小时得到的结果相比,发现最后45位小数有差异,因此他们取小数点后206,158,430,000位的p 值为本次计算结果。
这一结果打破了他们于1999年4月创造的68,719,470,000位的世界纪录。
随着数学的发展,数学家们在进行数学研究时有意无意地发现了许多计算pi 的公式。
Machin 公式 115239164arg arctg tg π=- 357211()(1)35721n n x x x x a rctg x x n --=-+-++--这个公式由英国天文学教授John Machin 于1706年发现。
他利用这个公式计算到了100位的pi 值。
Machin 公式每计算一项可以得到1.4位的十进制精度。
因为它的计算过程中被乘数和被除数都不大于长整数,所以可以很容易地在计算机上编程实现。
Bailey-Borwein-Plouffe 算法 014211()1681848586n n n n n n π∞==---++++∑这个公式简称BBP 公式,由David Bailey, Peter Borwein 和Simon Plouffe 于1995年共同发表。
它打破了传统的p 的算法,可以计算p 的任意第n 位,而不用计算前面的n-1位。
这为p 的分布式计算提供了可行性。
因此使用这个公式计算,与计算常数e (2.718282……)的公式非常类似,编程很容易实现。
二、要求:编写程序计算常数π到小数点后任意位,并将数据写入文件中。
参考程序:#include <iostream.h>#include <fstream.h>#include <iomanip.h>#include <time.h>int B=10000; /* Working base */int LB=4; /* Log10(base) */void Initial( int *pi, int *pi1,int *pi2, int *pi3, long n) {for (long i=0;i<n;i++){pi[i]=0; pi1[i]=0; pi2[i]=0; pi3[i]=0; }pi1[0]=4;pi2[0]=2;pi3[0]=1;}// Is the big real x equal to zero ?int IsZero (long n, int * x,int s) {long i;int carry=0, xi;int *y=new int[n];for ( i=0; i<n; i++) { y[i]=x[i];xi= y[i]+carry*B;y[i] = xi/(8*s+1); carry =xi%(8*s+1); }for (i=0; i<n; i++){ if (y[i] ) {delete []y; return 0;}} delete []y;return 1;}// Addition of big reals : x += yvoid Add (long n, int*x, int yy[],int s) {int carry=0, xi;int *y=new int[n];for (long i=0; i<n; i++) { y[i]=yy[i];xi= y[i]+carry*B;y[i] = xi/(8*s+1); carry =xi%(8*s+1); }carry=0;for ( i=n-1; i>=0; i--) {x[i] += y[i]+carry;if (x[i]<B) carry = 0;else { carry = 1; x[i] -= B; }}delete []y;}void Minus1(long n, int*x, int yy[],int s) {int carry=0, xi;int*y=new int[n];for (long i=0; i<n; i++) { y[i]=yy[i];xi= y[i]+carry*B; y[i] = xi/(8*s+4); carry = xi%((8*s+4)); }carry=0;for (i=n-1; i>=0; i--) {x[i]-= y[i]+carry;if (x[i]<0) {carry = 1;x[i]+= B; }else { carry = 0; }}delete []y;}void Minus2(long n, int*x, int yy[],int s) {int carry=0, xi;int *y=new int[n];for (long i=0; i<n; i++) { y[i]=yy[i];xi= y[i]+carry*B;y[i] = xi/(8*s+5); carry = xi%(8*s+5); }carry=0;for ( i=n-1; i>=0; i--) {x[i]-= y[i]+carry;if (x[i]<0) {carry = 1;x[i]+= B; }else { carry = 0; }}delete []y;}void Minus3(long n, int*x, int yy[],int s) {int carry=0,xi;int*y=new int[n];for (long i=0; i<n; i++) { y[i]=yy[i]; xi= y[i]+carry*B;y[i] = xi/(8*s+6); carry = xi%(8*s+6); }carry=0;for (i=n-1; i>=0; i--) {x[i]-=y[i]+carry;if (x[i]<0) {carry = 1;x[i]+= B; }else { carry = 0; }}delete []y;}// Division of the big real x by the integer dvoid Div (long n, int *x) {int carry=0, xi;for (int i=0; i<n; i++) { xi= x[i]+carry*B; x[i] = xi/16; carry = xi%16; }}// Print the big real xvoid Print (long n, int*x) {long i;cout<<x[0]<<".";for (i=1; i<n; i++) {cout<<setfill('0')<<setw(4)<<x[i];if (i%25==0) cout<<"\t"<<i*4<<endl;}cout<<endl; }void Savepi(long n,int *x) //保存PI到文件中{ofstream ofile("d:\\pi.txt");if(!ofile){cout<<"打开文件失败!!!"<<endl;return ;}long i;ofile<<x[0]<<".";for (i=1; i<n; i++) {ofile<<setfill('0')<<setw(4)<<x[i];if (i%25==0) ofile<<" "<<i*4<<endl;}ofile<<endl;ofile.close( );}// Computation of the constant pi example;void main ( ) {long NbDigits;cout<<"Input the number of to calculate:"; cin>>NbDigits;long int size=3+NbDigits/LB;int*pi = new int[size];int*pi1 = new int[size];int*pi2 = new int[size];int*pi3 = new int[size];long k=0;time_t T1,T2; T1=time(NULL);Initial(pi,pi1,pi2,pi3,size);while ( !IsZero (size, pi1,k) ){Add (size, pi, pi1,k);Minus1(size, pi, pi2,k);Minus2(size, pi, pi3,k);Minus3(size, pi, pi3,k);k++;Div (size, pi1); Div (size, pi2); Div (size, pi3);}Print (size-2, pi); /* Print out of e */]Savepi(size-2,pi);cout<<"k="<<k<<endl;T2=time(NULL);cout<<endl<<"Calculate time: "<<difftime(T2,T1)<<" s"<<endl; delete []pi;delete []pi1;delete []pi2;delete []pi3;}运行结果:Input the number of to calculate: 10003.1415926535897932384626433832795028841971693993751058209749445923078164062862089986280348 253421170679 100 821480865132823066470938446095505822317253594081284811174502841027019385211055596446229489 5493038196 200 442881097566593344612847564823378678316527120190914564856692346034861045432664821339360726 024******* 300 724587006606315588174881520920962829254091715364367892590360011330530548820466521384146951 9415116094 400 330572703657595919530921861173819326117931051185480744623799627495673518857527248912279381 8301194912 500 983367336244065664308602139494639522473719070217986094370277053921717629317675238467481846 7669405132 600 000568127145263560827785771342757789609173637178721468440901224953430146549585371050792279 6892589235 700 420199561121290219608640344181598136297747713099605187072113499999983729780499510597317328 1609631859 800 502445945534690830264252230825334468503526193118817101000313783875288658753320838142061717 7669147303 900 598253490428755468731159562863882353787593751957781857780532171226806613001927876611195909 2164201989 1000同时在D盘里生成了一个文件,文件名字为“ pi.txt ”。