控制舵机程序大全
舵机控制流程图

常规舵机控制流程图1.5ms脉宽)舵机电路方框图0.5—2.5ms舵机说明1,电机经过变速(减速)后连接到电位器柄旋转2,输入脉冲宽度为0.5—2.5ms,周期为3ms—20ms(数字舵机的脉冲周期因不同的客户使用的周期不同,常用为10ms;模拟舵机周期为20ms.)3,脉冲宽度,表示电位器转动的角度不同(即舵臂角度不同) 4,电机转速为14000/分钟,减速比为250:1,要求舵角转速为0.10-0.2S/60度(此部份与电机转速有关,程序方面需注意及时扫描电位器角度而给电机改变不同供电方式),扫描不及时易出现舵臂回抖现象.5,脉冲宽度不变的情况下,能锁住电机.6,堵转4秒钟后,电机进入低压供电(或PWM少占空比)工作模式,堵转一旦去除,电机供电进入正常模式.程序其它要求(因客户要求不同,需做不同类型的舵机)1,马达供电PWM(周期或占空比可调)2,电位器角度识别精度可调(1023分,255分,511分..)3,舵转动角度可调(-90 +90度)参考电路图:34Nu mb erRev isio 7-Ju n -2012Sh eet ofE:\TCH WORK\PCB 板\舵机.DDBDrawn By :o u t1o u t2o u t3o u t4mo ter正转1010101反转10101111STOP STOP 0000STOP舵机角度及脉冲宽度关系:不良舵机现象:1,堵转保护人为堵转电机时,约3秒后电机进入低电流(即低压,占空比少)供电方式,用以降低电机损耗而保护舵机.堵转一旦去除,电机需立即进入正常供电方式.不良现象:A,无保护功能B,堵转去除后电机不能马上进入正常状态2,马达抖动轻微外力作用舵臂时,因电位器角度有此而有细微变化(如:0.02度)下,马达转动以校正角度差.不良现象:A,马达校正时力度过大在,是出现抖动现象.(如角度差与电机供电时间或PWM没有建立关系;全压供电方式)堵转保护流程图无刷舵机控制流程图。
触摸感应控制舵机旋转代码
触摸感应控制舵机旋转引言舵机是一种常见的电动机,用于控制角度位置。
通过改变输入信号的脉宽,可以控制舵机的旋转角度。
传统上,舵机通常由外部设备(如遥控器)进行控制。
然而,随着科技的进步,我们可以利用触摸感应技术来实现对舵机的控制。
本文将介绍如何使用触摸感应来控制舵机旋转,并提供相应的代码示例。
硬件准备在开始编写代码之前,我们需要准备以下硬件: 1. 舵机:用于实现角度旋转。
2. 微处理器:例如Arduino、树莓派等。
3. 触摸感应模块:用于检测触摸输入。
软件准备在硬件准备完成后,我们需要安装相应的软件来编写和上传代码到微处理器中。
以下是一些常用的软件工具: 1. Arduino IDE:适用于Arduino开发板。
2. 树莓派操作系统:适用于树莓派。
代码编写步骤1:引入库文件首先,在代码开头引入舵机和触摸感应库文件。
这些库文件将提供我们所需的函数和方法。
#include <Servo.h>#include <TouchScreen.h>步骤2:定义舵机和触摸感应模块引脚接下来,我们需要定义舵机和触摸感应模块的引脚。
这些引脚将连接到我们的硬件设备。
#define SERVO_PIN 9#define TOUCH_XP A1#define TOUCH_YP A2#define TOUCH_XM 8#define TOUCH_YM 7步骤3:初始化舵机和触摸感应模块对象在setup函数中,我们需要初始化舵机和触摸感应模块对象,并设置相应的引脚。
Servo servo;TouchScreen touch(TOUCH_XP, TOUCH_YP, TOUCH_XM, TOUCH_YM);步骤4:设置舵机初始位置在setup函数中,我们还需要设置舵机的初始位置。
这可以通过调用servo.attach(SERVO_PIN)来实现。
void setup() {servo.attach(SERVO_PIN);servo.write(90); // 设置初始位置为90度}步骤5:检测触摸输入并控制舵机旋转角度在loop函数中,我们将持续检测触摸输入,并根据输入的位置来控制舵机旋转角度。
舵机基本控制方法

舵机基本控制⽅法控制任务
舵机的位置控制
电路设计
见下图
程序设计
1 #include <Servo.h> //舵机驱动头⽂件
2 Servo myservo; // 定义舵机对象
3int pos = 0; // 定义舵机初始位置
4
5void setup()
6 {
7 myservo.attach(9); // 设置舵机控制针脚
8 }
9
10void loop()
11 {
12for(pos = 0; pos < 180; pos += 1) // 0到180旋转舵机,每次延时50毫秒
13 {
14 myservo.write(pos);
15 delay(50);
16 }
17for(pos = 180; pos>=1; pos-=1) // 180到0旋转舵机,每次延时50毫秒
18 {
19 myservo.write(pos);
20 delay(50);
21 }
22 }
运⾏效果
舵机连续左右摆动近180度,循环
舵机控制原理
图1 微型舵机实物图
图2 舵机接线定义
图3 舵机位置控制原理
脉冲宽度在0.5ms 到2.5ms 之间时,与之对应的舵机转⾓为0°~180°。
注因为⽤到了舵机库函数,舵机信号线只能接控制板的9或11⼝。
按键控制舵机程序
按键控制舵机程序章节一:引言按键控制舵机是一种常见的控制方法,它通过按键的状态改变来控制舵机的位置。
这种方法简单易行,占用资源较少,因此在各种智能设备和机器人中被广泛应用。
本论文将介绍按键控制舵机的基本原理、软硬件实现方法以及应用案例。
通过本论文的学习,读者将能够了解到如何使用按键控制舵机,并可以根据实际需求进行灵活的应用和扩展。
章节二:按键控制舵机的原理按键控制舵机的原理是通过读取按键的状态来判断是否需要调整舵机的位置。
一般来说,按键有两个状态:按下和松开。
当按键被按下时,电路会输出低电平,舵机会根据低电平的信号调整位置;当按键被松开时,电路会输出高电平,舵机将保持当前位置。
在实际中,可以通过使用数字输入引脚读取按键的状态,然后与设定的阈值进行比较来判断按键是否被按下。
章节三:按键控制舵机的软硬件实现方法按键控制舵机的软硬件实现方法主要包括硬件电路和软件编程两个方面。
硬件电路部分,需要使用数字输入引脚来读取按键的状态,将读取到的状态与设定的阈值进行比较,从而确定舵机是否需要调整位置。
同时,还需要使用PWM(脉冲宽度调制)信号来控制舵机的位置。
可以通过连接Arduino等主控板和舵机,使用适当的电阻分压电路来实现读取按键状态的功能,然后将逻辑电平转化为舵机可以接受的PWM信号。
软件编程部分,需要使用相应的编程语言来控制舵机。
以Arduino为例,可以使用Arduino IDE编写程序。
首先需要定义数字输入引脚来读取按键状态,并使用digitalRead函数来获取其状态。
接着,需要用digitalWrite函数生成PWM信号,通过analogWrite函数将得到的PWM值传输给舵机的控制引脚。
通过不断循环检测按键的状态,根据实际需求来控制舵机的位置。
章节四:按键控制舵机的应用案例按键控制舵机有广泛的应用场景。
一种典型的应用案例是机器人的手臂控制。
通过使用按键控制舵机,可以灵活地控制机器人的手臂动作,实现抓取、放置等功能。
舵机控制流程图演示教学

舵机控制流程图常规舵机控制流程图1.5ms脉宽)带动电位器柄旋舵机电路方框图0.5—2.5msDC马达舵机说明1,电机经过变速(减速)后连接到电位器柄旋转2,输入脉冲宽度为0.5—2.5ms,周期为3ms—20ms(数字舵机的脉冲周期因不同的客户使用的周期不同,常用为10ms;模拟舵机周期为20ms.)3,脉冲宽度,表示电位器转动的角度不同(即舵臂角度不同) 4,电机转速为14000/分钟,减速比为250:1,要求舵角转速为0.10-0.2S/60度(此部份与电机转速有关,程序方面需注意及时扫描电位器角度而给电机改变不同供电方式),扫描不及时易出现舵臂回抖现象.5,脉冲宽度不变的情况下,能锁住电机.6,堵转4秒钟后,电机进入低压供电(或PWM少占空比)工作模式,堵转一旦去除,电机供电进入正常模式.程序其它要求(因客户要求不同,需做不同类型的舵机)1,马达供电PWM(周期或占空比可调)2,电位器角度识别精度可调(1023分,255分,511分..)3,舵转动角度可调(-90 +90度)参考电路图:VR15KR1220C4104123J1CON3VDDS11G12S23G24D25D26D17D18U1UD4606GS11G12S23G24D25D26D17D18U2UD4606GVDDVDDVSS1P3.0/SCL2SDA/P3.13VPP/P3.24ADC8/P005ADC9/P016ADC10/P027ADC11/P038ADC12/P049ADC13/P0510ADC14/P0611ADC0/P1012ADC1/P1113ADC2/P1214ADC3/P1315ADC4/P1416ADC5/P1517ADC6/P1618ADC7/P1719VDD20U3SC51P5708SN+C210uin3G1o u t2U4XC6206-33+C310USinSin3.3V3.3VR3220KR4220K A-+MG1MOTOR SERVO R21KC1104o u t1o u t2o u t3o u t4o u t1o u t2o u t3o u t4mo ter正转1111反转111111STOP STOPSTOP 电机正转电机反转不良舵机现象:1,堵转保护人为堵转电机时,约3秒后电机进入低电流(即低压,占空比少)供电方式,用以降低电机损耗而保护舵机.堵转一旦去除,电机需立即进入正常供电方式.不良现象:A,无保护功能B,堵转去除后电机不能马上进入正常状态2,马达抖动轻微外力作用舵臂时,因电位器角度有此而有细微变化(如:0.02度)下,马达转动以校正角度差.不良现象:A,马达校正时力度过大在,是出现抖动现象.(如角度差与电机供电时间或PWM没有建立关系;全压供电方式)堵转保护流程图无刷舵机控制流程图。
51单片机 舵机控制程序
51单片机舵机控制程序题目:基于51单片机的舵机控制程序设计与实现第一章:引言1.1 研究背景51单片机是一种广泛应用于嵌入式系统中的微控制器,具有成本低、功耗低、可靠性高等优点。
而舵机是一种能够控制角度的电机装置,广泛应用于机器人、航模和自动化设备等领域。
本章旨在探讨基于51单片机的舵机控制程序设计与实现的意义和必要性。
1.2 研究目的本研究的主要目的在于设计并实现一套稳定、高效的舵机控制程序,为使用51单片机的嵌入式系统提供角度控制功能。
通过本研究,可以提高舵机控制的精度和稳定性,拓展舵机的应用领域。
第二章:51单片机舵机控制程序的设计2.1 硬件设计根据舵机的控制特点,我们需要通过PWM信号控制舵机转动的角度。
在硬件设计上,我们需要使用51单片机的定时器功能产生PWM信号,并通过IO口输出给舵机。
具体的设计方案包括选择合适的定时器、设置定时器的工作模式和频率等。
2.2 软件设计在软件设计上,我们需要通过编写51单片机的控制程序实现舵机的控制。
具体的设计流程包括:(1)初始化:设置定时器的工作模式和频率,配置IO口的输出模式。
(2)角度控制:根据舵机的角度范围和控制精度,将目标角度转换为占空比,并通过PWM信号控制舵机转动到目标角度。
(3)稳定性优化:通过对定时器周期和占空比的调整,优化舵机的稳定性,减小舵机的误差。
第三章:51单片机舵机控制程序的实现3.1 硬件搭建在实现阶段,我们需要根据硬件设计方案选购相应的硬件元件,并将其搭建成一个完整的舵机控制系统。
具体的搭建过程包括:(1)选购舵机和51单片机等硬件元件,并连接相关的信号线。
(2)按照硬件设计方案,搭建并调试舵机控制系统。
3.2 软件编写在软件实现阶段,我们需要使用51单片机的编程语言(如C语言或汇编语言)编写舵机控制程序,并通过编译和烧录等步骤将程序下载到51单片机中。
具体的编写过程包括:(1)按照软件设计方案,编写舵机控制程序的相关函数和逻辑。
舵机控制程序
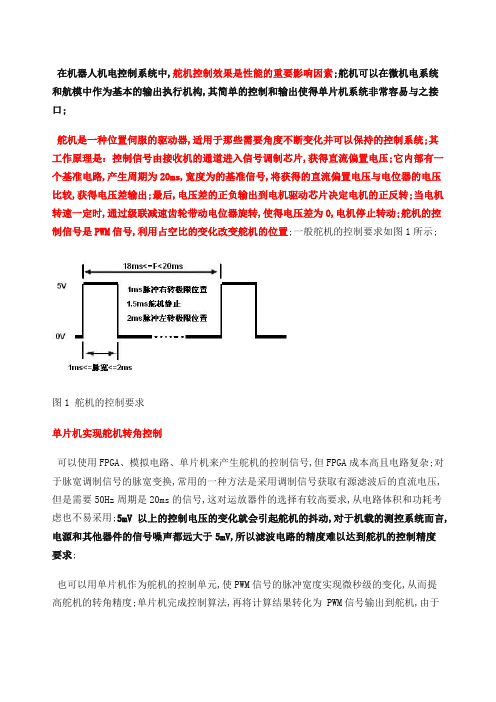
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素;舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口;舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统;其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压;它内部有一个基准电路,产生周期为20ms,宽度为的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出;最后,电压差的正负输出到电机驱动芯片决定电机的正反转;当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动;舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置;一般舵机的控制要求如图1所示;图1 舵机的控制要求单片机实现舵机转角控制可以使用FPGA、模拟电路、单片机来产生舵机的控制信号,但FPGA成本高且电路复杂;对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz周期是20ms的信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不易采用;5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以达到舵机的控制精度要求;也可以用单片机作为舵机的控制单元,使PWM信号的脉冲宽度实现微秒级的变化,从而提高舵机的转角精度;单片机完成控制算法,再将计算结果转化为 PWM信号输出到舵机,由于单片机系统是一个数字系统,其控制信号的变化完全依靠硬件计数,所以受外界干扰较小,整个系统工作可靠;单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM 周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM信号的输出,并且调整占空比;当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断;这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高;具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机;用修改定时器中断初值的方法巧妙形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动;为保证软件在定时中断里采集其他信号,并且使发生PWM信号的程序不影响中断程序的运行如果这些程序所占用时间过长,有可能会发生中断程序还未结束,下次中断又到来的后果,所以需要将采集信号的函数放在长定时中断过程中执行,也就是说每经过两次中断执行一次这些程序,执行的周期还是20ms;软件流程如图2所示;图2 产生PWM信号的软件流程如果系统中需要控制几个舵机的准确转动,可以用单片机和计数器进行脉冲计数产生PWM 信号;脉冲计数可以利用51单片机的内部计数器来实现,但是从软件系统的稳定性和程序结构的合理性看,宜使用外部的计数器,还可以提高CPU的工作效率;实验后从精度上考虑,对于FUTABA系列的接收机,当采用1MHz的外部晶振时,其控制电压幅值的变化为,而且不会出现误差积累,可以满足控制舵机的要求;最后考虑数字系统的离散误差,经估算误差的范围在±%内,所以采用单片机和8253、8254这样的计数器芯片的PWM信号产生电路是可靠的;图3是硬件连接图;图3 PWA信号的计数和输出电路点击放大基于8253产生PWM信号的程序主要包括三方面内容:一是定义8253寄存器的地址,二是控制字的写入,三是数据的写入;软件流程如图4所示,具体代码如下;1.//关键程序及注释:2.//定时器T0中断,向8253发送控制字和数据3.void T0Intinterrupt14.{5.TH0=0xB1;6.TL0=0xE0;//20ms的时钟基准7.//先写入控制字,再写入计数值8.SERVO0=0x30;//选择计数器0,写入控制字9.PWM0=BUF0L;//先写低,后写高10.PWM0=BUF0H;11.SERVO1=0x70;//选择计数器1,写入控制字12.PWM1=BUF1L;13.PWM1=BUF1H;14.SERVO2=0xB0;//选择计数器2,写入控制字15.PWM2=BUF2L;16.PWM2=BUF2H;17.}图4 基于8253产生PWA信号的软件流程当系统的主要工作任务就是控制多舵机的工作,并且使用的舵机工作周期均为20ms时,要求硬件产生的多路PWM波的周期也相同;使用51单片机的内部定时器产生脉冲计数,一般工作正脉冲宽度小于周期的1/8,这样可以在1个周期内分时启动各路PWM波的上升沿,再利用定时器中断T0确定各路PWM波的输出宽度,定时器中断T1控制20ms的基准时间;第1次定时器中断T0按20ms的 1/8设置初值,并设置输出I/O口,第1次T0定时中断响应后,将当前输出I/O口对应的引脚输出置高电平,设置该路输出正脉冲宽度,并启动第2次定时器中断,输出I/O口指向下一个输出口;第2次定时器定时时间结束后,将当前输出引脚置低电平,设置此中断周期为20ms的1/8减去正脉冲的时间,此路 PWM信号在该周期中输出完毕,往复输出;在每次循环的第16次2×8=16中断实行关定时中断T0的操作,最后就可以实现8路舵机控制信号的输出;也可以采用外部计数器进行多路舵机的控制,但是因为常见的8253、8254芯片都只有3个计数器,所以当系统需要产生多路PWM信号时,使用上述方法可以减少电路,降低成本,也可以达到较高的精度;调试时注意到由于程序中脉冲宽度的调整是靠调整定时器的初值,中断程序也被分成了8个状态周期,并且需要严格的周期循环,而且运行其他中断程序代码的时间需要严格把握;在实际应用中,采用51单片机简单方便地实现了舵机控制需要的PWM信号;对机器人舵机控制的测试表明,舵机控制系统工作稳定,PWM占空比~的正脉冲宽度和舵机的转角-90°~90°线性度较好;如何使用AT89S52编写这样一个程序;要求,单片机控制舵机,让舵机到中间位置后,左转15度,延迟2ms,右转15度;度数不要求精确;舵机为~;晶振12Minclude<>unsigned int pwm;unsigned char flag;sbit p10=P1^0;void timer0 interrupt 1 using 1{p10=p10;pwm=20000-pwm;TH0=pwm/256;TL0=pwm%256;flag++;ifflag<10flag++;ifflag==10&&p10==0{pwm=1250;flag=11;}//保证回到90度再左转15;}void timer1 interrupt 3 using 1{ET1=0;//2ms到关闭定时器1ET0=0;TR0=0;pwm=1750;TH0=pwm/256;TL0=pwm%256;ET0=1;TR0=1;}void int0 void interrupt 0 using 1{//判断左转到15,通过传感器判断或者其他信号判断 ,能正好保证刚左转15度,开始延时2msTR1=1;//定时器1开始计数}void mainvoid{p10=1;TMOD=0x11;pwm=1500;//回90度TH0=pwm/256;TL0=pwm%256;TH1=2000/256;TL1=2000%256;EA=1;ET0=1;ET1=1;TR0=1;while1;}舵机控制程序8路舵机控制器芯片:AT89S52晶振:12MHz============================================================================== =====/i nclude<>define uint8 unsigned chardefine uint16 unsigned intsbit key1=P1^4;sbit key2=P1^5;//PWM的输出端口sbit PWM_OUT0=P0^0;sbit PWM_OUT1=P0^1;sbit PWM_OUT2=P0^2;sbit PWM_OUT3=P0^3;sbit PWM_OUT4=P0^4;sbit PWM_OUT5=P0^5;sbit PWM_OUT6=P0^6;sbit PWM_OUT7=P0^7;//PWM的数据值uint16 PWM_Value8={1500,1000,1500,1000,1750,2000,2500,2000};uint8 order1; //定时器扫描序列/============================================================================= ======定时器T0的中断服务程序一个循环20MS = 8============================================================================== =======/void timer0void interrupt 1 using 1{switchorder1{case 1: PWM_OUT0=1;TH0=-PWM_Value0/256;TL0=-PWM_Value0%256;break;case 2: PWM_OUT0=0;TH0=-2700-PWM_Value0/256;TL0=-2700-PWM_Value0%256;break;case 3: PWM_OUT1=1;TH0=-PWM_Value1/256;TL0=-PWM_Value1%256;case 4: PWM_OUT1=0;TH0=-2700-PWM_Value1/256; TL0=-2700-PWM_Value1%256; break;case 5: PWM_OUT2=1;TH0=-PWM_Value2/256;TL0=-PWM_Value2%256;break;case 6: PWM_OUT2=0 ;TH0=-2700-PWM_Value2/256; TL0=-2700-PWM_Value2%256; break;case 7: PWM_OUT3=1;TH0=-PWM_Value3/256;TL0=-PWM_Value3%256;case 8: PWM_OUT3=0;TH0=-2700-PWM_Value3/256; TL0=-2700-PWM_Value3%256; break;case 9: PWM_OUT4=1;TH0=-PWM_Value4/256;TL0=-PWM_Value4%256;break;case 10: PWM_OUT4=0;TH0=-2700-PWM_Value4/256; TL0=-2700-PWM_Value4%256; break;case 11: PWM_OUT5=1;TH0=-PWM_Value5/256;TL0=-PWM_Value5%256;case 12: PWM_OUT5=0;TH0=-2700-PWM_Value5/256; TL0=-2700-PWM_Value5%256; break;case 13: PWM_OUT6=1;TH0=-PWM_Value6/256;TL0=-PWM_Value6%256;break;case 14: PWM_OUT6=0;TH0=-2700-PWM_Value6/256; TL0=-2700-PWM_Value6%256; break;case 15: PWM_OUT7=1;TH0=-PWM_Value7/256;TL0=-PWM_Value7%256;case 16: PWM_OUT7=0;order1=0;TH0=-2700-PWM_Value7/256;TL0=-2700-PWM_Value7%256;order1=0;break;default : order1=0;}order1++;}/============================================================================= ======初始化中断============================================================================== =======/void InitPWMvoid{order1=1;TMOD |=0x11;TH0=-1500/256;TL0=-1500%256;EA=1;EX0=0;ET0=1; TR0=1;PT0=1;PX0=0; }void delayvoid{uint16 i=100;whilei--;}void mainvoid{InitPWM;while1{ifkey1==0{ifPWM_Value0<2500 PWM_Value0++; }ifkey2==0{ifPWM_Value0>500 PWM_Value0--;}delay;}}单片机舵机控制程序include<>define uchar unsigned chardefine uint unsigned intuint a,b,c,d,n;sbit p12=P1^2;sbit p13=P1^3;sbit p37=P3^7;void timer0void interrupt 1 using 1 {p12=p12;c=20000-c;TH0=-c/256;TL0=-c%256;ifc>=500&&c<=2500c=a;elsec=20000-a;}void delay{uint i;fori=0;i<200;i++{}}void init_serialcommvoid{SCON= 0x50; //SCON: serail mode 1, 8-bit UART, enable ucvr TMOD |= 0x21; //TMOD: timer 1, mode 2, 8-bit reloadPCON |= 0x80; //SMOD=1;TH1 = 0xF4; //Baud:4800fosc=IE |= 0x93; //Enable Serial Interrupt TR1 = 1; // timer 1 run// TI=1;}void serial interrupt 4 using 3{ifRI{RI = 0;b=SBUF;SBUF=0xff;whileTI==0;TI=0;}}void mainvoid {//TMOD=0x21;init_serialcomm; p12=1;a=1500;c=a;TH0=-a/256;TL0=-a%256;PX0=0;PT0=1;TR0=1;while1{a=b10;}}舵机控制程序改变a值可控制任意角度include<>include<>define uchar unsigned chardefine uint unsigned intuint a,c;sbit p10=P1^0;sbit p11=P1^1;void timer0void interrupt 1{p10=p10;p11=p11;c=20000-c;TH0=-c/256;TL0=-c%256;ifc>=500&&c<=2500c=a;elsec=20000-a;}void delaylong j {forj;j>0;j--;}void mainvoid{p10=1;p11=1;a=2500; //180//c=a;TMOD=0x01; //16位定时器工作方式1 TH0=-a/256;TL0=-a%256;EA=1;ET0=1;TR0=1;fora=2500;a>=500;a--{a=a-10;c=a;delay5000;}}基于AT89C2051的多路舵机控制器设计 2007-11-10 11:37摘要舵机是机器人、机电系统和航模的重要执行机构;舵机控制器为舵机提供必要的能源和控制信号;本文提出一种以外部中断计数为基础的PWM波形实现方法;该方法具有简单方便,成本低,可实现多路独立PWM输出的优点;关键词 AT89:205l 舵机控制器外部中断PWM舵机是一种位置伺服的驱动器;它接收一定的控制信号,输出一定的角度,适用于那些需要角度不断变化并可以保持的控制系统;在微机电系统和航模中,它是一个基本的输出执行机构;1 舵机的工作原理以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路;舵机的工作原理是:PWM信号由接收通道进入信号解调电路1;的12脚进行解调,获得一个直流偏置电压;该直流偏置电压与电位器的电压比较,获得电压差由的3脚输出;该输出送人电机驱动集成电路,以驱动电机正反转;当电机转速一定时,通过级联减速齿轮带动电位器R;,旋转,直到电压差为O,电机停止转动;舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置;2 舵机的控制方法标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示;电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V;注意,给舵机供电电源应能提供足够的功率;控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms即频率为50 Hz;当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比;某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示;3 舵机控制器的设计1舵机控制器硬件电路设计从上述舵机转角的控制方法可看出,舵机的控制信号实质是一个可嗣宽度的方波信号PWM;该方波信号可由FPGA、模拟电路或单片机来产生;采用FPGA成本较高,用模拟电路来实现则电路较复杂,不适合作多路输出;一般采用单片机作舵机的控制器;目前采用单片机做舵机控制器的方案比较多,可以利用单片机的定时器中断实现PWM;该方案将20ms的周期信号分为两次定时中断来完成:一次定时实现高电平定时Th;一次定时实现低电平定时T1;Th、T1的时间值随脉冲宽度的变换而变化,但,Th+T1=20ms;该方法的优点是,PWM信号完全由单片机内部定时器的中断来实现,不需要添加外围硬件;缺点是一个周期中的PWM信号要分两次中断来完成,两次中断的定时值计算较麻烦;为了满足20ms的周期,单片机晶振的频率要降低;不能实现多路输出;也可以采用单片机+8253计数器的实现方案;该方案由单片机产生计数脉冲或外部电路产生计数脉冲提供给8253进行计数,由单片机给出8253的计数比较值来改变输出脉宽;该方案的优点是可以实现多路输出,软件设计较简单;缺点是要添加l片8253计数器,增加了硬件成本;本文在综合上述两个单片机舵机控制方案基础上,提出了一个新的设计方案,如图4所示;该方案的舵机控制器以单片机为核心,555构成的振荡器作为定时基准,单片机通过对555振荡器产生的脉冲信号进行计数来产生PWM信号;该控制器中单片机可以产生8个通道的PWM信号,分别由的P1.0~12~19引脚端口输出;输出的8路PWM信号通过光耦隔离传送到下一级电路中;因为信号通过光耦传送过程中进行了反相,因此从光耦出来的信号必须再经过反相器进行反相;方波信号经过光耦传输后,前沿和后沿会发生畸变,因此反相器采用施密特反相器对光耦传输过来的信号进行整形,产生标准的PWM方波信号;笔者在实验过程中发现,舵机在运行过程中要从电源吸纳较大的电流,若舵机与单片机控制器共用一个电源,则舵机会对单片机产生较大的干扰;因此,舵机与单片机控制器采用两个电源供电,两者不共地,通过光耦来隔离,并且给舵机供电的电源最好采用输出功率较大的开关电源;该舵机控制器占用单片机的个SCI串口;串口用于接收上位机传送过来的控制命令,以调节每一个通道输出信号的脉冲宽度;为电平转换器,将上位机的电平转换成TTL电平;2实现多路PWM信号的原理在模拟电路中,PWM脉冲信号可以通过直流电平与锯齿波信号比较来得到;在单片机中,锯齿波可以通过对整型变量加1操作来实现,如图5所示;假定单片机程序中设置一整型变量SawVal,其值变化范围为O~N;555振荡电路产生的外部计数时钟信号输入到的INTO脚;每当在外部计数时钟脉冲的下降沿,单片机产生外部中断,执行外部中断INT0的中断服务程序;每产生一次外部中断,对SawVal执行一次加1操作,若SawVal已达到最大值N,则对SawVal清O;SawVal值的变化规律相当于锯齿波,如图5所示;若在单片机程序中设置另一整型变量DutyVal,其值的变化范围为O~N;每当在SawVal清0时,DulyVal从上位机发送的控制命令中读入脉冲宽度系数值,例如为H0≤H≤N;若DutyVal≥SawVal,则对应端口输出高电平;若DutyVal<Sawval,则对应端口输出低电平;从图5中可看出,若改变DutyVal的值,则对应端口输出脉冲的宽度发生变化,但输出脉冲的频率不变,此即为PWM波形;设外部计数时钟周期为TINT0,锯齿波周期PWM脉冲周期为TPWM,PWM脉冲宽度占空比为D,由图5可得出如下关系:由式3可知,PWM波形的周期TPWM一旦确定下来,只须选定计数最大值N,就可以确定外部时钟脉冲所需周期频率;外部时钟脉冲周期TINT0显然是PWM脉冲宽度变换的最小步距,即调节精度;由式4可知,N越大,步距所占PWM周期的百分比越小,精度越高;例如,若采用8位整型变量,最大值N=28-1=255,则精度为1/255+1=1/255;若采用16位整型变量,最大值N=216-1=65535,则精度为1/65536;文中计数变量SawVal采用8位整型变量,因此N=255;对于一般应用,其精度已足够;就舵机而言,要求TPWM=20ms,则可算得外部时钟周期为:因此,设计555振荡电路时,其输出脉冲的频率应为:当有多个变量与SawVal比较,将比较结果输出到多个端口时;就形成了多路PWM波形;各个变量的值可以独立变化,因此各路PWM波形的占空比也可以独立调节,互不相干;多路PWM波形的产生如图6所示;图中以3路PWM波形为例;4 舵机控制器软件的设计舵机控制器的控制核心为单片机;文中,程序用C5l编写,工作方式为前后台工作方式;单片机程序包括系统初始化程序、串口通信程序、上位机命令解释与PWM脉宽生成程序和多路PWM波形输出程序;串行通信程序和多路PWM波形输出程序采用中断方式;串口通信格式为渡特率9600bps、8位数据位、1位停止位、无校验、ASCII码字符通信;串口通信程序用于接收上位机发送过来的控制命令;控制命令采用自定义文本协议,即协议内容全部为ASCII码字符;通信协议格式如图7所示;例如,要控制通道1的PWM脉宽,脉宽系数为25,则通信协议内容为“”“1”“0”“2”“5”“”这6个字符;这时通道l的PWM占空比为25/256=O.098;一个通道号对应一个PWM脉冲输出端口;本设计为8个通道,号码为l~8,对应单片机的P1.o~P1.7;起始符和终止符起到帧同步的作用;串口通信程序流程如图8所示;图8中,CHNo存放的是PWM通道号ASCII码,Dutyl00、DutylO、Duoyl分别存放的是脉宽系数的百位数、十位数和个位数的ASCII码注意,若高位数为O,则该位的字符应为“0”,不能省略;如25,完整字符应为“O”“2”“5”;CharNo为信号量,用于对串口接收的字符顺序以及串口中断与上位机命令解释程序之间进行同步;5 舵机控制器实验图9为舵机控制板输出的其中一路PWM波形带舵机负载;从图9中可看出,舵机控制器输出的PWM波形稳定、干净,符合设计要求;6 结论本文提出的多路舵机控制器设计方法,以单片机为核心,由外部振荡电路提供PWM脉冲的定时基准,控制部分与舵机驱动部分由两个电源供电,两者电气隔离;这种设计方案的优点是:①PWM波形由外部振荡电路提供定时基准,与单片机内部振荡器的频率无关,不影响串口通信、定时器等参数的配置;②PWM波形的调整精度可任意确定;③本没计思路可应用于任意多路的PWM输出,只要单片机能提供足够多的输出端口,例如将换成AT89S5l,就可以提供至少24路的PWM输出P0、Pl、P2;④控制参数由SCI串口输入,适应面广,上位机可以是PC机、单片机或是PLC;⑤本方法具有一般性,任何单片机只要能提供SCI中断、外部中断就可以应用本方法;。
360度舵机 控制代码
360度舵机控制代码360度舵机是一种常用的舵机类型,与传统180度舵机相比,它能够实现更大的旋转范围,从而用于更广泛的应用。
本文将介绍如何控制360度舵机,并提供相应的控制代码。
1. 硬件准备在开始之前,我们需要准备一些硬件设备,包括360度舵机、Arduino开发板、杜邦线等。
确保所有硬件都连接正确并稳定。
2. 软件准备请确保您已经安装了Arduino IDE,并在电脑上打开它。
接下来,我们将编写代码来控制360度舵机。
3. 导入库文件为了控制舵机,我们需要导入Servo库文件。
在Arduino IDE中,点击“工具”>“加载库”>“Servo”来导入Servo库。
4. 定义引脚和舵机对象在代码的开头部分,我们需要定义相关的引脚和舵机对象。
引脚通常是数字引脚,用于连接舵机信号线。
在此示例中,我们使用引脚9作为舵机信号线所连接的引脚。
cpp#include <Servo.h>#define servoPin 9Servo myServo;5. 初始化舵机在setup()函数中,我们需要初始化舵机对象,并将舵机连接的引脚设置为输出模式。
cppvoid setup() {myServo.attach(servoPin);pinMode(servoPin, OUTPUT);}6. 控制舵机转动为了控制舵机的旋转角度,我们需要使用write()函数。
write()函数接受一个角度参数,范围从0到180度。
对于360度舵机,需要将角度参数映射到舵机所支持的360度范围内。
cppvoid loop() {控制舵机转到0度myServo.write(0);delay(1000); 等待1秒控制舵机转到180度myServo.write(180);delay(1000); 等待1秒}在循环中,我们可以通过不同的角度参数来控制舵机的旋转。
在本例中,我们分别将舵机转到0度和180度,并在每次旋转后等待1秒。