超短基线基阵基元相移差的测量
超短基线水声定位系统

令
则
r(t) Ar cost Br sint 解得
Br tan
Ar
rt Ar2 Br2 cos
r1 r1 Ar cos 1 Br sin 1 r2 r 2 Ar cos 2 Br sin 2
Ar
r2 sin 1 r1 sin
sin1 2
2
r3 r 3 Ar cos 3 Br sin 3
cost t0 ,
t -t0 T
0,
其它
23
3.5 改善超短基线定位系统定位精度的措施
采用宽带信号提高定位精度
Rout t
A
t
2T
t
0
s
in
t
t0 1
t
t0 T
cost t0 ,
ቤተ መጻሕፍቲ ባይዱ
t -t0 T
接收的时延0, 值t0:为最大值出现的X时a 刻 R。cosm其x它
Rc mx
d
“跳象限”的情况主要由水面反射引起,可通过信号处 理的方法解决。
以前采用单频信号时,对信号处理的手段未进行较深入地研究, 存在此种问题。
现在采用宽带信号,信号处理的手段也较高,“跳象限”的问
题可以解决。
16
3.5 改善超短基线定位系统
定位精度的措施
分析
不考虑声速和阵元间距误差的情况下
X a
当 接近 90°(即信标或应答器在基阵的下方)时,相位差很小,前3
项影响很小,相位测量误差起主要作用。
随θmx ,θ my 减小,前3项影响加大 当信标或应答器在靠近基阵所在平面
(即角度很小)时2,d因c有o反s射m声影
响,精度也难保证。
结论: 超短基线系统只在基阵下方一个有限的锥体内定位精度较高
利用夹角几何关系的超短基线定位方法
利用夹角几何关系的超短基线定位方法梁国龙;张毅锋;付进【摘要】针对传统超短基线的定位方法定位精度有限的问题,本文提出了一种利用夹角几何关系的超短基线高精度定位方法.该方法构建超短基线定位误差分析模型,依据超短基线中存在的夹角几何关系,研究了深度信息对超短基线定位精度的影响.通过有效利用深度信息,减小主要误差源对定位精度的影响,从而达到提高定位精度的目的.研究表明:该方法能够显著提高超短基线定位精度,尤其是对以相位差估计误差为主的情况效果更为明显,且在绝大多数区域均能提高定位精度.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2019(040)008【总页数】6页(P1474-1479)【关键词】超短基线;定位方法;误差分析;深度信息;夹角几何关系;高精度;相位差估计误差;误差源【作者】梁国龙;张毅锋;付进【作者单位】哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001;哈尔滨工程大学水声技术重点实验室,黑龙江哈尔滨150001;哈尔滨工程大学水声工程学院,黑龙江哈尔滨150001【正文语种】中文【中图分类】TB565.2超短基线定位系统因其尺寸小、成本低、灵活性强等优点,在海洋工程、海洋矿产资源、水下考古、海洋国防等领域得到了广泛的应用[1-24]。
常见的超短基线定位系统多依赖于孔径小于半波长的三元或四元基阵,利用CW信号测量各通道间的相位差来估计目标的位置[1]。
传统的超短基线定位方法依靠阵元间的相位差来估计目标所在方位,其相位差估计精度取决于信噪比,因此,超短基线的远距离目标定位精度往往不高。
喻敏等[4-6]通过改进阵型增加了基阵的基线长度,有效提高了超短基线的定位精度;郑翠娥等[3,6]通过改变信标发射信号的形式,以达到提高超短基线定位精度的目的;赵安邦等[8]提出了一种可用于任意声速分布的定位算法,并通过计算机仿真验证了算法的有效性。
海洋测绘的分类及应用
海洋测绘的分类及应用海洋测绘是一门研究海洋、江河、湖泊以及毗邻陆地区域各种几何、物理、人文等地理空间信息采集、处理、表示、管理和应用的学科,是测绘学的一个重要分支,是一切海洋军事、海洋科学研究及开发和利用活动的基础。
海洋测绘产业属于细分市场,是海洋科学研究、海上交通运输、海洋权益维护、海洋资源开发、海洋工程建设、海洋环境治理和海战场建设的基础。
当然,由于海洋环境的特殊性,以及海洋外部轮廓与海底的复杂性,使得高质量的海洋探测及海洋信息获取变得相对困难。
尽管如此,随着科技的进步与设备的不断更新,使解决海洋问题有了更多的可能,海洋测绘正向着深度与广度方向发展,以改变目前落后于陆域测绘及效率低下的问题。
近年来,随着大数据、云计算等高新技术手段的快速发展及在测绘领域的不断渗透,海洋测绘在数据获取方式、信息处理技术、产品供应形态及应用保障领域也在发生深刻变革,海洋物联网和海洋信息化建设未来会影响到人们的生活。
1.海道测量、海洋测绘和海洋调查的区分海洋测绘是从海道测量沿革而来,我国很早就开展了河道、航道、海道、水道方面的测量,也很早就有了海道测量的说法。
1919年在伦敦召开了首届国际海道测量大会,并筹备成立国际海道测量机构。
我国的海洋测绘事业是从1949年初开始起步的,内容基本也局限于水深测量、海岸地形测量、底质探测、障碍物探测、潮汐潮流观测等,属于海道测量范围;上世纪80年代后,才吸纳了海洋重力测量和海洋磁力测量,于是才有了海洋测绘的术语。
海道测量以海岸与海底地形测量及海底底质探测为基础,重点在船舶航行安全保障;海洋测绘是研究海面、海岸、海底地形测量和海洋大地、重力、磁力、工程测量等方面理论与技术的综合性学科,它的外延要相对宽泛的多。
海洋测绘包括海道测量、海洋地球物理测量、海洋学调查等方面内容。
按刘雁春教授的定义,海洋测量(或称水域测量)是服务于水域交通运输和其他经济与军事活动的一项对水域及相关区域进行探测、数据获取的实用性测量工作,同时为研究地球形状、海底构造和空间信息提供基础性信息。
水声定位

各个水听器测的与目标的斜距为:
长基线水声定位系统
目标与原点的斜距为:
将式中
展开得:
从而得到:
ri
消去
r
可得方程:
用矩阵可写作:
其中,
但矩阵A奇异,因此方程有多个解,得不到唯一解。考虑再增加一个水听器, 并测得它与目标的斜距 r4,可得另一个方程:
消去
r 得:
用上式代替矩阵方程第三行,则矩阵A非奇异,方程组可得到唯一解。 但当水听器都位于同一水平面,且 仍然是奇异矩阵,可用三个水听器得测量值以及 已知时 ,矩阵A 联立,得方程组:
在海底布设由T1,T2,T3组成的水听 器接收基阵,在直角坐标系坐标分别为
T1 (x1, y1,z1), T2 (x 2 , y2 ,z2 ), T3 (x3 , y3 ,z3 ) ,水听器位置
校准后,则假定坐标为已知量。 各个水听器到原点的距离为:
di xi 2 yi2 zi2 (i 1, 2,3)
短基线水声定位
系统组成: 1) 被定位的船或潜器上至少有3个水听器。 2) 间距在5~20米的量级。 3) 水面船上面装有问答机 4) 一个同步信标(或应答器)置于海底 工作原理 问答机接收来自信标(或应答器)发出的信号, 根据信号到达各基元的时间,求得斜距,据此可计算 水面船相对于信标(或应答器)的位置。
超短基线定位系统的基阵长度一般在几厘米到几十厘米,与前两种不同,利
用各个基元接收信号间的相位差来解算目标的方位和距离。 若按照工作方式划分,以上三种定位系统都可以选择使用同步信标或应
答器工作方式。
询问器或问答机:是安装在船上的发射器和接收器。它以一个频率发出询 问信号,并以另一频率接收回答信号。接收频率可以多个,对应于多个应 答器,常常只相隔0.5kHz。发射和接收换能器是无指向性的。 应答器:是置于海底或装在载体上的发射/接收器。它接收问答机的询问信 号(或指令),发回另一与接收频率不同的回答信号。收发换能器无指向 性的。 声信标:置于海底或装在水下载体(潜器)上的发射器,它以特定频率不 停的发出声脉冲。它是自主工作的。声信标分同步式和非同步式两种。 响应器:置于海底或装在水下载体(潜器)上的发射器,它由外部硬件 (如控制线)的控制信号触发,发出询问信号。问答机或其它水听器接收 它的信号。它常用于噪声较强的场合。
影响功能仿真中雷达作用距离的若干因素
出 。
7
0
O
0
0
1
O
0
传输损耗0 0 0 、 波束 形状 损耗 、 门限损耗 、 带宽失配 损耗等 。功 能 仿真 中这部分总损耗一般 取 L =1 2~1 B 1 7d l 。综 上 , 总的 8 3 嘶 5 吣
损 耗 因子
24 .
3 O 8
L=L +L 6 目标 R S C
连 续 波
M TI
P 为平均噪声功率 , 由公式 ( ) 2 计算得到 j 。
P :K o , TB () 2
式 中: K=13 . 8×1 JK, 波尔兹 曼常数 ;o=2 0K, 0 / 为 T 9 为
2 2 方 向 图 因子 .
标 准室温 ; , 日 为雷达接 收机 有效带宽 , 由参 数配置时 自定 义 ; F 为 噪声 系数 , 取值一般 为 0—1 B 。 5d ]
为实现 雷达模型的通用化设计 , 使其具 备不 同体 制 的雷 达 的探测效果 , 要加 入 改善 因子 , 进 行修 正 。对于 一般 需 。 的雷达 , 均 取 l 而对于频率 分集 、 变频 、 冲压缩 、 , ; 捷 脉 连续
波、 脉冲多普勒 、 T 等体制 的雷达 , 用表 1中给 出的公式 MI ,
0
表 2 云 中电磁 波单程损耗 系数
0
0
O
1 6 2 ∞
O 0 O
水云
USBL水下定位系统误差研究
USBL水下定位系统误差研究摘要:基于对USBL定位原理的把握,对影响USBL水下定位系统误差的各种因素进行研究,以期为测量工作人员提供相应指导,基于对各种行之有效措施的采用达到提高USBL水下定位精度的目的。
关键词:USBL,水下定位,系统误差,定位精度在水下导航定位系统的运行过程中,GPS系统、超短基线(USBL)以及船载传感器等所具有的稳定性以及可靠性都会在较大程度上影响到整个水下定位的准确性,不仅如此,水上与水下定位数据的融合方式同样是定位准确性的重要影响因素。
在上述各种因素中,USBL系统的稳定性、可靠性研究最为重要。
USBL当前在海洋石油勘探、海洋打捞等领域有着比较广泛的应用,主要功能为对ROV、ads等进行水下精准定位。
在整个水下导航定位工作的开展过程中,哪些因素会对USBL的定位精度产生影响长期以来一直是测量作业人员重点考虑的问题,并他们将这些因素影响下导致的误差作为重点研究与解决方向,本文对此作相应的研究。
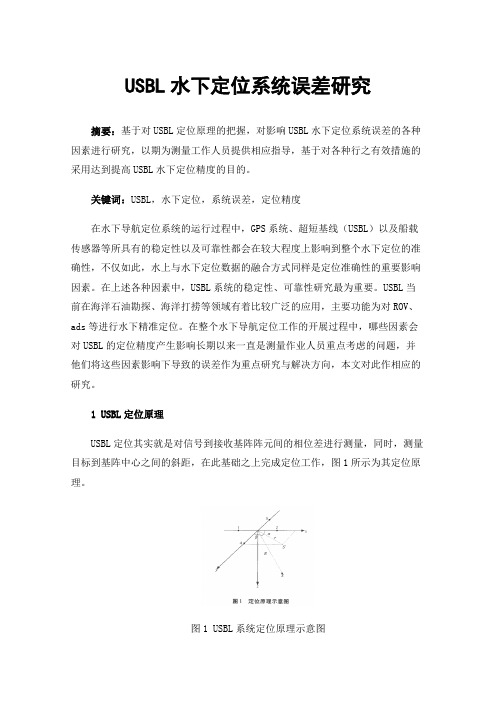
1 USBL定位原理USBL定位其实就是对信号到接收基阵阵元间的相位差进行测量,同时,测量目标到基阵中心之间的斜距,在此基础之上完成定位工作,图1所示为其定位原理。
图1 USBL系统定位原理示意图假设目标点位置在处,用坐标()对其加以表示。
正交直线阵一共有两个,其一在轴上,另外一个则在轴上,坐标原点对基阵中心加以表示。
另外,设目标径矢由来表示,由此,可用公式(1)-(3)来表示其方向余弦,有:(1)(2)(3)式中各字母表示含义分别为:,—目标径矢和轴、轴的夹角;—目标斜距。
通常,基阵的尺寸都不大,可将其视作远场接收,也就是入射至全部基元的声线都是平行的。
根据图2,可用公式(4)来表示水听器接收信号时延差同信号入射角之间的关系:(4)式中各字母表示含义分别为:—水中声速;—阵元间距;—两个阵元接收信号之间的时延差。
图2 两接收器之间的时延差示意图进一步地,基于对公式(4)的利用,可将轴、轴阵元接收信号的时延差确定下来,分别表示为与,将它们分别代入公式(1)和公式(2),有:(5)(6)公式(5)-(6)即定位解算基本公式。
基丁超短基线的UUV伴随式跟踪系统及应用
图1USBL定位原理1可知,目标在基阵坐标系下的位置可表示为:=cos·,=cos·,=cos·,为目标相对基阵中心的斜距,、、坐标轴的夹角,cos、cos、cos为目标方向余弦。
由二元测向定理的基本公式[7],可将和的方向余弦通和式(5)表示:,,为声波在水中传输速度,为轴相邻基元的时延轴相邻基元的时延差。
此外,、、cos2x+cos2y+cos2z=1。
(4)~式(6)可确定目标的方向余弦:。
目标3个方向的方向余弦均已知,要确定目标位置还需确定斜距。
由于基阵尺寸很小,且选用基阵的几何中心作为基阵坐标系的原点,因此目标在坐标系中的斜距可以根据下式获得:,号基元的传播时间。
可获得目标在基阵坐标系下的位置:,,。
通过上述算法得到UUV相对USBL基阵的位置之后,GPS数据与姿态传感器数据进行坐标转换来获取目标的绝对地理位置。
定位误差误差分析节可知,USBL定位方法通过测量目标到达声学。
)可知,方向定位误差Δ受到声速误差及时延差误差的影响[8]。
下面分别单独考虑各测量误差带来的定位误差。
仅考虑声速误差Δ,式(12)可写为:。
为随机变量,其方差为:,式中:为方向定位方差,为声速方差。
定义声速误差放大倍数为,表达式如下:。
定位误差与目标离基阵几何中心的斜距有关,越大,越小,声速误差的放大倍数同理可求得方向定位方差与距离方差及时延差方差的关)所示:,。
定义距离误差的放大倍数,表达式如下:,。
定位误差与目标和坐标轴夹角越大,方向定位误差越大。
定义时延误差的放大倍数,表达式如下:。
定位误差与目标离基阵几何中心的斜距越短,声速误差的放大倍数定位误差同时受目标斜距、坐标轴夹角以及基线长度的影响。
当基线长度确定后,图2各处海域声速剖面(a)渤海(b)黄海(c)东海(d)南海本文以渤海海域和黄海海域为例,分析伴随式USBL系统在不同海域的最大作用距离与测量精度。
系统作用距离仿真分析系统的作用距离是USBL系统必须要考虑的指标,对跟踪性能有着较大的影响,因此在实验前对该参数进行仿真分析。
高精度超短基线定位系统的分析与仿真_马晓民
- 15 -2002年第 1 期 声学与电子工程 总第 65 期 高精度超短基线定位系统的分析与仿真 马晓民 田路 (第七一五研究所 富阳311400) 摘要 本文对基阵孔径远大于半波长的超短基线定位系统作了精度分析和技术分析,并提供了主要技术的仿真结果。
关键词 超短基线定位 应答器 宽带信号 时延测量1引言 近年来,在深海海洋勘探中大量使用各类深拖设备,作业中要实时测量这些设备的水下位置信息,因此需要使用水声定位系统完成这一任务。
超短基线(USBL )定位系统是经常使用的一种定位设备,这种设备安装使用方便,价格相对便宜,但其定位精度不高,有效定位距离也不远。
常规的超短基线定位系统多采用孔径小于半波长的三元或四元基阵,使用CW 信号,通过计算各通道间的相位差估算信标方位,再利用应答或同步方式测量信标斜距,最后测得信标位置。
由于基阵孔径小,一般仅为3~5cm,系统的定位精度受限,另外,由于多途干涉的影响,CW 信号的相位会产生起伏,这也将直接影响定位精度。
为了满足深海作业需要,必须对常规USBL 定位系统进行改进,以实现远距离定位要求。
主要改进措施包括加大基阵孔径、使用宽带信号进行测向并使用高精度测量传感器进行补偿等。
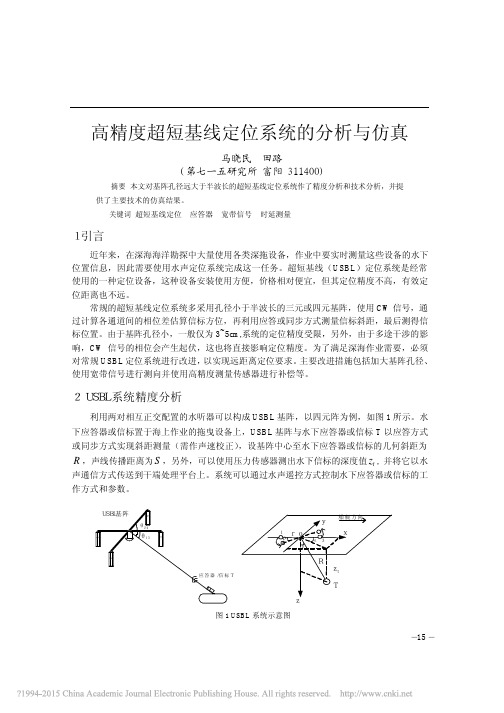
2 USBL系统精度分析 利用两对相互正交配置的水听器可以构成USBL 基阵,以四元阵为例,如图1所示。
水下应答器或信标置于海上作业的拖曳设备上,USBL 基阵与水下应答器或信标T 以应答方式或同步方式实现斜距测量(需作声速校正),设基阵中心至水下应答器或信标的几何斜距为R ,声线传播距离为S ,另外,可以使用压力传感器测出水下信标的深度值t z , 并将它以水声通信方式传送到干端处理平台上。
系统可以通过水声遥控方式控制水下应答器或信标的工作方式和参数。
图1 USBL 系统示意图 r ¦Ñ-16 - 各符号如图1所示。
通过简单的几何计算并作适当近似,可以得到在立体空间中入射角13θ、24θ与方位角α和俯仰角β间的关系式。
超短基线(USBL)在OBN定位中的应用

220OBN(Ocean Bottom Node,海底节点)是一种位于海底,可以独立采集、记录地震信号的多分量地震仪,可以在浅滩、过渡带、平台等复杂地形施工作业,其独立采集的特点让OBN作业区域更宽泛,作业方式更多样,施工效率更高。
特别是深水的OBS地震勘探中,OBN已经成为海洋地震采集的主要方法[1]。
在OBN地震勘探中,节点铺放精度是直接决定地震资料好坏的因素之一。
在铺放过程中由于受到潮流、水中障碍物、海底泥层的不规则性等因素影响,节点在下水点的位置坐标和其实际沉放到海底的位置坐标存在着较大差异,这种差异会直接影响地震资料的好坏。
所以海洋地震勘探对OBN施工作业的要求是:确定检波点点位在海底的准确位置,使其精度尽可能满足施工设计和作业指标要求,确保地震资料质量[2]。
1 OBN 施工方式和定位方法OBN与拖缆、OBC的区别主要是OBN作为一个无需额外供电的独立采集系统,可以单节点铺放,也可以多个节点串联起来铺放。
常规的施工方式是用绳子将多个节点按照一定的道间距,把整个施工设计排列上所有的节点串联起来,按照测线的桩号顺序一个个铺放到海底,等完成地震资料采集后再将节点从海底回收。
因节点本身不具备声学定位功能,需要在节点上绑定信标(声学设备),通过确定信标在水下的位置来确定对应节点的位置。
为了提高节点的铺放精度,需要采用超短基线(USBL)声学定位系统实时定位节点铺放过程中节点的位置,利用作业船舶的位置调整,通过节点绳将受力传导给节点,调整控制节点在水中下落过程中的运动状态,使节点落在设计点位的范围内。
节点完成铺放后,还要对水下节点进行二次声学定位,确定节点在海底的真实位置,作为最终的成果资料。
2 超短基线(USBL)系统工作原理和应用在国内外的OBN项目里,水深低于300米的项目都使用到了超短基线(USBL)声学定位系统。
相对于长基线定位系统,超短基线(USBL)使用更方便,更简单,不用专门在海底铺设声学矩阵,就可以实时跟踪单点信标,非常适合OBN节点作业的特点。
一种四元超短基线阵实现高精度定位

一种四元超短基线阵实现高精度定位郑恩明;陈新华;孙长瑜;余华兵【摘要】由于超短基线自身尺寸较小,随着作用距离增加,其定位误差增大.对此,本文在阵元数较小的情况下,通过优化阵型形成间距不等的四元阵来提高系统定位精度.该阵型既减少了已有八元阵的冗余阵元,也不需要发射端发送跳频信号.本文给出了新阵型的相位补偿公式以及所适用频带的理论分析.理论分析和数值仿真表明:本文所述新阵型与已有的八元阵定位精度相当.可为改善超短基线定位精度提供一些参考.【期刊名称】《应用声学》【年(卷),期】2013(032)001【总页数】8页(P15-22)【关键词】超短基线;四元阵;定位精度【作者】郑恩明;陈新华;孙长瑜;余华兵【作者单位】中国科学院声学研究所北京100190;中国科学院大学北京 100190;中国科学院声学研究所北京100190;中国科学院声学研究所北京100190;中国科学院声学研究所北京100190【正文语种】中文【中图分类】TB5681 引言传统超短基线常采用尺寸小于发射信号半波长的三角阵或四元正交阵,因其自身尺寸小,易于安装等特点,在水下目标定位中被广泛应用。
正是由于超短基线的尺寸小,超短基线定位系统采用各个阵元接收信号间的相位差来解算目标的方位和距离[1-4]。
由于水声环境特性比较复杂,常存在多途、噪声等干扰对阵元接收信号产生影响,导致相位存在波动,致使传统超短基线的处理方法作用距离近,对远距离目标定位精度差。
为了解决上述问题,提高远距离目标的定位精度,本文依据传统三角阵、四元正交阵、文献[5]所提出的四元阵和文献[6-8]所提出的八元阵的定位原理,提出了一种不等间距四元新阵对传统超短基线定位精度进行改进。
本文新阵型是通过对角线上无相位模糊的两个阵元在x轴和y轴的投影来对x、y轴上存在相位模糊的大孔径阵元间的相位进行补偿来解决其相位模糊问题,进而实现高精度定位。
仿真结果表明本方法的定位精度可与已有的八元阵定位精度相当,可实现远距离目标的高精度定位。
高速下潜弹道测量系统研制

关键词 : 声定位 ; 短基线 ; 水 超 弹道 测 量
中图分类号 :N 5 T 9
文献标识码 : A
文章编号 :06— 7 7 2 1 )0— 10—0 10 0 0 (0 1 1 0 0 3
1 1 系 统 组 成 与 工 作 流 程 .
12 系统 工 作 流 程 .
整个系统工作流程如图 2所示。
2 系统硬件设计
2 1 水 面 定 位 单 元 .
1 系统组成与工作流程
高速下潜弹道测量 系统 采用在 运动 物体上 安装 同步声 信标 , 利用 安装 在水 面船 的超 短基 线定位系统 同步接收声信 标发射 的信号 , 并进行 数据采 集 和准实 时处理 , 以精 确获 得 水下运动物体 的轨迹 。
工作是否正常工作 。 自检装置包括 声或 电信号源 、 采集监 控 装置 、 助设 备等 。声或 电信号源 向换 能器基 阵施加模 拟信 辅 号, 采集监控 装置检查 系统 输 出和状态 , 确认 系统 正常是 否
工作 。
处 理 机
图 2 系统 工作 流程
2. . 12 主 处 理 机
声信标通过一个 总的外部 接 口来实现对信 标 的同步控制 、 信 标的上下 电管理 、 信标 电池 电量 的监测 以及 读取 C F卡 中存 储 的压力数据 。 2 3 自检装 置 . 自检装置用 于对 整个 测量系统进行 自检确认 , 判断 系统
超短 基线换能器基阵功能是接 收水下声信 号 , 成信 号 完 的声 电转换 。换 能器接收振子采用叠 片结构 , 收振 子 的谐 接 振频率设计 在远 离工作频率的高端 , 利用 基元接 收灵 敏度 曲 线低端平坦 部分来满足工作频率接 收灵敏 度的指标要求 。
超短基线方向测量研究
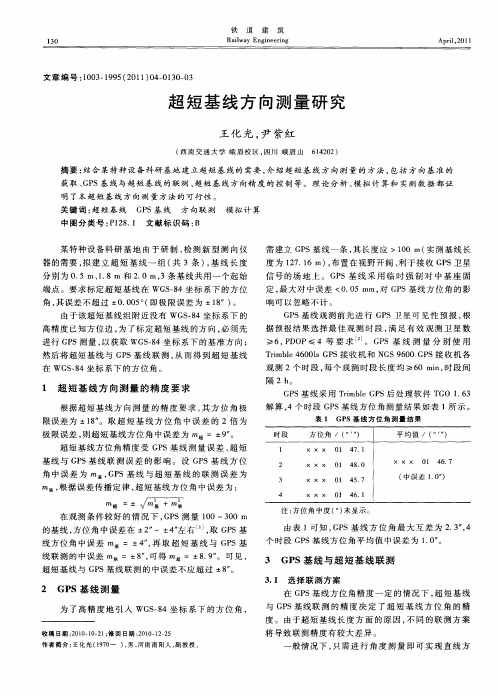
1 超 短 基 线 方 向 测 量 的精 度 要 求
根据超 短基 线方 向测 量 的精 度 要求 , 方 位 角极 其 限误 差为 ±1 ” 8。取 超 短 基 线 方 位 角 中误 差 的 2倍 为
极 限 误 差 , 超 短 基 线 方 位 角 中误 差 为 m = 4 ” 则 - 。 9
中 图 分 类 号 : 1 8 1 文 献 标 识 码 : P 2 . B
某 特种设 备科研 基 地 由于研 制 、 测 新 型测 向仪 检
器的需要 , 建 立超 短 基 线 一 组 ( 3条 ) 基 线 长 度 拟 共 , 分 别为 0 5m、. . 1 8I 2 0m, n和 . 3条基 线共用一 个起 始
01 4 7.1
01 48
.ቤተ መጻሕፍቲ ባይዱ
0
× × ×
01 46 .7
3
4
× × × 0 4 . 1 57
x x × Ol 4 6.1
( 误 差 10) 中 . ”
mS 4 √| 基 + m2 - m2 联
在观测 条件较 好 的情 况下 , P G S测 量 10~30 m 0 0 的基线 , 方位 角 中误 差在 ±2 ~± 右 ¨ , G S基 4左 取 P 线方 位角 中误差 1 = ±4 , 取 超 短 基 线 与 G S基 1 1 ”再 P 线联 测 的中误差 m联= 4 可 得 m - , 8 超=±8 9 。可见 , .”
在 G S基 线方 位角精 度一 定 的情 况 下 , 短 基线 P 超 与 G S基线联 测 的精 度决 定 了超 短 基 线 方 位 角 的精 P
度 。 由于超短基 线长 度 方 面 的原 因 , 同 的联 测方 案 不
一种精确测定超短基线真方位角的方法

一种精确测定超短基线真方位角的方法
尹冬丽;贺里梅
【期刊名称】《海洋测绘》
【年(卷),期】2022(42)4
【摘要】针对精确测定超短基线真方位角具有一定难度与不确定性的问题,探讨一种基于站心地平坐标系定义与基础理论的解算方法,并结合某飞机惯导检验项目,精确解算、探讨了大地站心地平坐标系在求解超短基线真方位角中的应用,并通过高斯投影法进行了评定,获得了精确的解算与较好的验证结果,即通过求解超短基线相邻长基线真方位角的方法,可减小定向误差,提高求解精度;高斯投影法与在站心地平坐标系下计算的真方位角互差均控制在1″以内,基于站心地平坐标系真方位角的计算模型及其结果是正确的。
基于站心地平坐标系来精确求解超短基线真方位角表明:该方法是可靠便捷的,是完全能够运用到精密测定类似超短基线真方位角的实践活动中的。
【总页数】4页(P1-4)
【作者】尹冬丽;贺里梅
【作者单位】河南水利与环境职业学院土木工程系;青海省自然资源综合调查监测院
【正文语种】中文
【中图分类】P229
【相关文献】
1.舰艇航向标校基线方位角的精确测量方法研究
2.一种超短基线定位系统阵型的改进方法
3.一种基于超短基线定位的便携式AUV回坞导航方法
4.一种基于超短基线定位的便携式AUV回坞导航方法
5.一种微小型等边三元阵的超短基线定位方法
因版权原因,仅展示原文概要,查看原文内容请购买。