力士乐控制器手册
力士乐驱动器使用说明
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
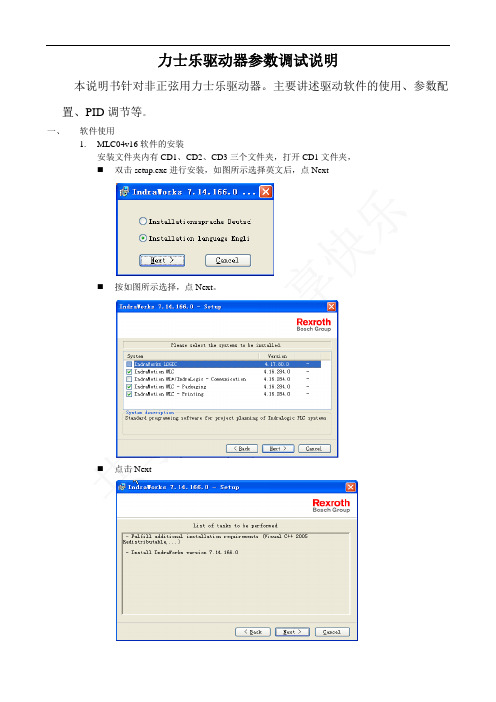
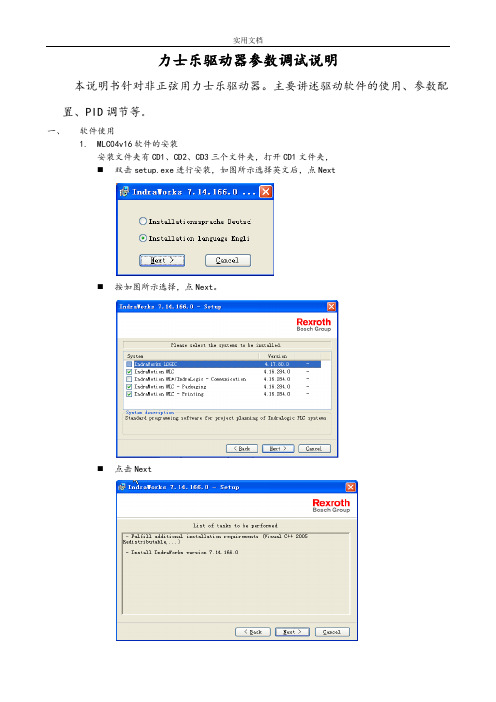
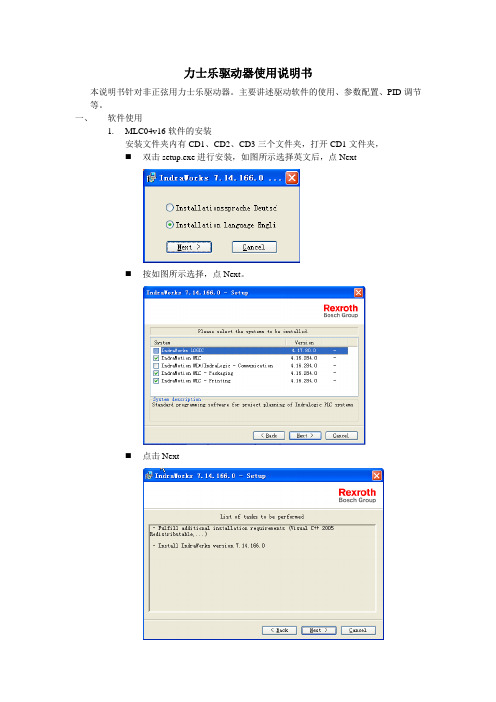
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
中文力士乐03系列DKC伺服驱动器参数手册
前言本说明书由779K于2010年11月15日用谷歌翻译系统完成翻译,对于翻译之准确不做保证,仅供各位同行在不急需时参考。
在本说明书的后半部分,附有英文原版说明书,如遇到不能理解之词汇,读者可以再次翻译更正。
翻译此说明书耗时30多小时,时间匆促,书中错误部分希望各位同仁继续更正发布,因为目前参数中文说明书网上基本没有。
779K于2010年11月15日22时30分德国力士乐伺服驱动器参数说明书ECODRIVE03设备一般自动化本机具有串行实时通信系统,模拟和并行接口。
版权所有 INDRAMAT有限公司,1999传输,以及本文件复制,商业使用或将其内容不得沟通无明确的书面许可。
违反这些规定将要求赔偿。
为实施专利或者发行版权所有注册外观设计。
(德国工业标准34-1)有效期保留所有权利就这个文件的内容和可用性的产品。
出版 INDRAMAT有限公司· Bgm.,博士,纳贝尔- STR基因。
2 ·的D – 97816加尔各答电话09352/40-0 ·发送689421 ·传真09352/40-4885部完(OS/TH)注意:本文件印在无氯漂白纸。
总结文件 - 概述内容1一般资料1-1使用本手册............................................... ................................ 1-1定义................................................. ............................................ 1-22月2日至1日标准参数S - 0 - 0001,NC的周期时间(TNcyc )...................................... ................. 2-1S - 0 - 0002,SERCOS的周期时间(Tscyc )...................................... ..................................... 2-1S - 0 - 0003,最小的AT发送起始时间(T1min)....................... 2-1S - 0 - 0004,发送/接收转换时间(TATMT).................................... ................................ 2-1S - 0 - 0005,最小反馈采集时间(T4min )..................................... ............................ 2-2S - 0 - 0006,在传输开始时间(T1)..................................... ......................................... 2-2S - 0 - 0007,反馈收购启动时间(甲状腺素)..................................... .................................. 2-2S - 0 - 0008,命令的有效时间(T3)的...................................... ................................................. 2-3S - 0 - 0009,开始处理主数据电报...................................... ........................... 2-3S - 0 - 0010,长度主数据电报....................................... ............................................ 2-3S - 0 - 0011,1级诊断......................................... .................................................. ........... 2-3S - 0 - 0012,第2类诊断......................................... .................................................. ........... 2-4S - 0 - 0013,3级诊断......................................... .................................................. ........... 2-5S - 0 - 0014,接口状态.......................................... .................................................. ................. 2-6S - 0 - 0015电类型参数......................................... .................................................. .. 2-7S - 0 - 0016,自定义放大器电报配置清单....................................... ......................... 2-8S - 0 - 0017,国际化域名列表,所有业务数据列表..................................... ..................... .. 2-8S - 0 - 0018,国际化域名列表,对运行数据的CP2名单.................................... ............................... 2-8 S - 0 - 0019,国际化域名列表,为CP3运行数据清单.................................... ................................... 2-8 S - 0 - 0021,国际化域名列表,为商业无效运算数据列表。
力士乐驱动器使用说明
.力士乐驱动器使用说明书本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
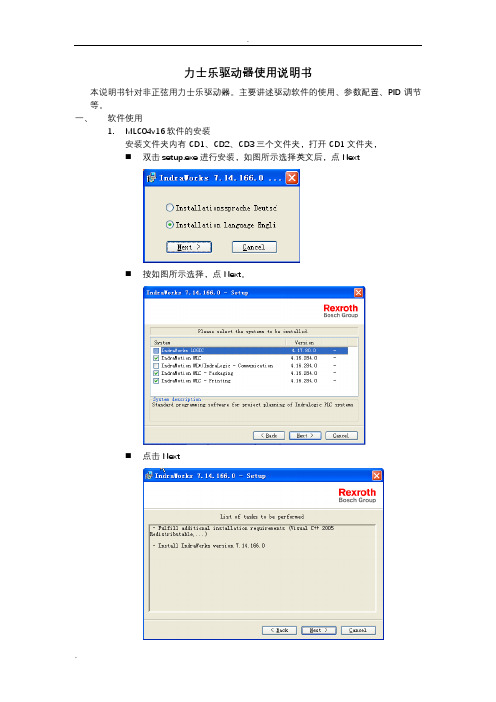
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next.⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
Rexroth (博世力士乐)EFC 3600 简易手册

目录目录页数1 结构安装 (1)1.1 目视检查 (1)1.2 环境条件 (1)1.3 安装条件 (2)1.4 尺寸 (3)2 电气安装 (6)2.1 电缆规格 (6)2.2 主回路端子 (8)2.3 控制信号端口的连接 (9)3 设置参数 (13)3.1 操作面板 (13)3.2 起动 (14)3.3 操作指导 (15)3.4 参数列表 (16)4 故障指示 (36)结构安装1 结构安装1.1 目视检查打开变频器包装后,请进行目视检查。
检查以下项目:●供货型号是否正确●设备是否有损坏●运输过程中是否造成机箱划痕、裂痕或凹痕如果发现任何上述问题,请联系Bosch Rexroth分销商。
1.2 环境条件为了保证变频器正常运行,变频器的安装环境必须符合下表所列数据。
①:参见《使用手册》“10.3:电气参数的降额”。
表格 1-1: 环境条件1.3 安装条件变频器根据额定值的不同,分为不同的外型尺寸。
为了达到理想的散热效果,必须保证下图所示变频器与相邻物品之间上、下的最小安装距离。
插图 1-1:安装条件●上图所示变频器为机箱1至3。
上述最小安装距离适用于机箱1至机箱4。
●必须垂直安装变频器。
●如果将一台变频器安装在另外一台之上,确保变频器进气口温度不超过上限值(参见 第 1.2 章 "环境条件" 第 1 页 )。
如果超过上限,建议在变频器之间安装隔板,防止上升的热空气被吸入上面的变频器。
Bosch Rexroth AG 结构安装1.4 尺寸表格 1-2: EFC 3600尺寸①:完整型号(类型编码)为:EFC3600-xKxx-xPx-xDA-7P-NNNN ,参见《使用手册》17.3章附录三:类型编码。
②:安装EFC 3600机箱1、2、3,需要2颗螺钉。
③:安装EFC 3600机箱4,需要4颗螺钉。
Bosch Rexroth AG结构安装Bosch Rexroth AG 结构安装插图 1-2: 机箱1、2、3Bosch Rexroth AG结构安装插图 1-3: 机箱42 电气安装2.1 电缆规格2.1.1 主回路配线变频器根据额定值的不同,分为不同的外型尺寸。
力士乐焊接机控制器说明书
力士乐焊接机控制器说明书一、引言力士乐焊接机控制器是一种专门用于焊接机控制的设备。
本说明书旨在向用户介绍该控制器的功能、操作方法以及维护注意事项,以便用户能够正确、安全地使用该设备。
二、功能介绍1. 控制器具有多种焊接模式,包括手动模式、自动模式等,可根据不同的焊接需求选择合适的模式。
2. 控制器支持多种焊接参数的调节,如焊接电流、焊接时间等,用户可以根据具体情况进行灵活的调整。
3. 控制器具有良好的稳定性和精确度,能够确保焊接质量的稳定和一致性。
4. 控制器具备自动检测功能,能够实时监测焊接电流、电压等参数,及时报警并采取相应措施,确保焊接过程的安全性。
三、操作方法1. 开机:将电源开关置于“ON”位置,控制器将自动启动。
2. 选择焊接模式:根据具体需求,通过控制面板上的模式选择按钮,选择手动模式或自动模式。
3. 调节焊接参数:根据焊接要求,通过控制面板上的参数调节按钮,调节焊接电流、焊接时间等参数。
4. 开始焊接:确认好焊接参数后,按下“开始”按钮,焊接机将开始工作。
5. 完成焊接:焊接完成后,按下“停止”按钮,控制器将停止工作。
四、维护注意事项1. 定期检查控制器的电源线和接线端子是否正常,如有损坏或松动应及时更换或固定。
2. 清洁控制器外壳时,应使用干净的布进行擦拭,不得使用湿布或化学溶剂。
3. 避免将控制器放置在潮湿、高温或多尘的环境中,以免影响其正常运行。
4. 定期对控制器进行维护保养,如清洁内部灰尘、检查电路板连接状态等。
5. 如发现异常情况或故障,应立即停止使用控制器,并寻求专业人士的帮助进行维修。
五、常见问题解答1. 问:控制器无法启动怎么办?答:首先检查电源是否正常连接,然后检查电源开关是否打开。
如果以上两个因素都正常,可能是控制器内部出现故障,建议联系售后服务人员进行检修。
2. 问:焊接过程中出现报警怎么办?答:根据报警提示信息,检查相应的焊接参数是否合理,如电流过大或时间设置错误等。
力士乐VLC系列小型PLC 选型手册说明书

力士乐VLC系列小型PLC 选型手册2产品简介VLC 2000系列小型PLC是博世力士乐为中国市场量身定制的一款工业自动化控制类产品,本产品以丰富的功能、卓越的性能、灵活的扩展性以及优异的品质,给用户提供优秀的控制解决方案。
VLC 2000系列PLC产品最大可以扩展32个模块,具备最大512点数字量、128路模拟量通道的控制能力,可同时处理最多32个PID运算,最多能够扩展到5个通讯口,基于强大的逻辑控制和数据处理能力,并且具有丰富的运动控制能力,可以广泛的应用于印刷包装、纺织、电子产品制造、机床、暖通空调、建筑智能化等多个行业。
VFC 5610HMI执行器3技术参数4丰富的通讯► 标配RS232通讯口,作为编程口使用,同时也可直接连接HMI 。
►通过选件卡可以扩展RS232/RS485/CANopen 接口。
► 支持标准的Modbus RTU/ASCII 协议,同时也支持客户自定义自由通讯协议。
强大的功能► 灵活易用的通讯应用,可以通过表格配置方式代替冗长的通讯及效验指令。
► 强大的高速计数性能,单机最多8路高速计数,支持单相计数模式、计数 加方向模式、AB 相计数模式。
► 丰富的中断控制,最多支持16路外部中断,8种定时中断。
► 单机最多36点的输入脉冲捕捉功能。
► 丰富强大的计时器功能,支持0.01 s ,0.1 s 及1 s 的普通定时器,同时具 有0.1 mS 的高速定时功能。
► 高速脉宽调制输出,支持最多4通道的高精度脉宽调制控制,最高控制精 度可以达到0.1 %。
► 丰富的高速脉冲输出功能,可以进行两轴直线插补控制,以及最多独立4 轴的运动控制。
► 齐全的扩展模块种类,具备多种规格的DI/DO, AI/AO 以及通讯扩展。
► 功能丰富的PID 控制指令,具有专门的温度控制PID 指令,通用PID 指令简 单易用。
优异的品质► 所有PCB 版均采用镀金板,且表面重点区域进行三防涂层处理。
BT_6说明书
4.2 连接 ( x2) 连接: 类型: 导线长: 导线线型: 传输速率: 参数: 传输:
Sub-D 插头,9 孔 RS232 c, 单独通电 最大 15 m LIYCY:有屏蔽的,位置绞合的,最小横截面积 0.25mm2 19200 个位元/秒 8 e1(8 个数据位元,同等奇偶校验) 和 CRC 16 的 ps5000 区块协定
BT6 的功能在第 5 节中被描述。
3. 安装
重量:
大概 0.5 公斤
终端 :
大概 0.8 公斤
位置:
控制箱,手提式的壳。
依照 IP 65 封闭
定向:
可能的任何定向
保护度:
依照按 60529
独立单位:
bt6 前面板:
IP 65
bt6 背面:
IP 20
手册程序规划终端机: IP 54
工作温度范围: 0_ C 到 +50_ C
安全说明 使用准备 人员资格 产品的安全记号 安全指令 安装和组合 产品的使用 使用方法 产品维护 使用安全 概要 安装和组合 连接 电源 通信 使用 操作键 主菜单及功能一览 选择主菜单及使用导航键 快捷方式 快捷方式参数表 特殊功能 显示错误信息 系统语言选择 液晶显示屏对比度设置 控制功能禁用(改变密码) 显示电极磨损程度/重置计数器 显示上次焊接数据 I/O 显示 维护 电池 保险丝 软件 显示软件型号 更新软件型号 附录 缩写 索引
力士乐驱动器使用说明书
力士乐驱动器参数调试说明本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
博世力士乐 CS351 CC-CS351 紧凑系统操作手册说明书
2/52博世力士乐股份公司CS351/CC-CS351|3609929B45/2014-09CS351 | 3609929B45/2014-09博世力士乐股份公司3/54目录1关于本文档 (05)2一般安全说明 (06)3交付范围 (09)4产品说明 (10)5运输和存储 (31)6装配 (32)7调试 (34)8操作 (38)9维护和修理 (40)10废弃 (46)11拆卸和更换 (47)12处置 (48)13扩展和转换 (48)14故障诊断 (48)15技术数据 (49)16服务与销售 (52)语英4/54 博世力士乐股份公司CS351 | 3609929B45/2014-09以上所列数据仅用于对产品进行说明。
我们提供的信息不能作为对某种条件或某种应用适用性的声明。
所提供的信息不能免除用户自行判断和验证的义务。
请注意,我们的产品会经受自然磨损和老化。
© 本文档及其中所列的数据、规格和其它信息为博世力士乐股份公司独家所有。
未经许可,不得将其翻印或提供给第三方。
本文档以 PDF 文件的形式提供。
原始操作说明的翻译。
原始说明以德语制作。
CS351 | 3609929B45/2014-09 博世力士乐股份公司5/54关于本文档英语1关于本文档本手册包含有关 CS351/CC-CS351 紧凑型系统的安全和适当装配、运输、调试、操作、维护、拆卸以及简单故障诊断的重要信息。
有关紧凑型系统中使用的软件说明并不包含在这些说明中。
有关您可能需要的软件和操作的任何信息,请参阅 BS350 操作程序的联机帮助以及随附的 USB 系统记忆棒中的系统文档。
在使用紧凑型系统之前,请完整阅读这些说明,尤其是第 6 页的“一般安全说明”一章。
文档的范围此文档适用于 CS351 和 CC-CS351 紧凑型系统。
需要符合 VDI/VDE 2862 类别 A 文档的拧紧操作可以使用由 ErgoSpin 手持式拧紧机和 CS351E... 紧凑型系统组成的拧紧系统来执行。
力士乐控制器RC2-2
7)
21 49 37
7)
40 26 120 Ohm 25 4 ) 39
CAN 总线 接口 4)
开关输入
开关
CAN L
1)
参见下一页脚注
RC 95201/03.09
0 - 2.0 A 100 - 250 Hz 0.5 kHz
1 1 1
ISO 11898
电源电压可通断。 如果外部接地,可以用作开关输入。 3) 在输出上作用的电压切勿高于作用在电源针脚 1、27、41、42 上的电压。 4) 在电压接反时,外部保险丝熔断。 5) 在使用开关功能时,要遵守各个适用的软件说明 (API)。 6) 负载 484 Ω。可以利用软件切换至 22 kΩ。
温度传感器
7) 20
T_A1 9 )
7)
T_A2 9 ) 9 T_A3 9 ) T_A4 9 ) DIG_A1 6) 48 10 11 DIG_A2 DIG_A3 6) DIG_A4
温度输入
51 TxD 50 RS-232 24 RxD
备用
CAN H
52
C D B E A H G F
诊断插头, 用于 BODAS-service
插头
1)
考虑安装注意事项
6/16
Bosch Rexroth AG
RC
RC 95201/03.09
连接图 RC2-2/21
1 A3 )
点火开关 10)
30 15
安全开关
3A
13 41 42
8)
停止输出 8) 启动信号 电源 输出级的电源电压
31
10 A +12 V/+24 V 30 + 31
力士乐控制器RC6-9
RC 95203/02.11 RC36-20 系列 30
Bosch Rexroth AG
3/24
说明
BODAS 控制器 RC36-20 是一款通用的中央控制器,专为复 杂的行走机械而设计。凭借超现代 32 位三核技术以及 150 MHz 的时钟频率和并行处理,RC36‑20 在性能维度方面获 得了全新的提升,在此之前此类功能仅能由大型 PLC 系统提 供。RC36‑20 的应用领域包括比例线圈的可编程控制,行走 驱动的额外切换功能和换挡以及行走机械中高复杂性控制电 路的协调。具有 67 条输入通道,56 个输出级和一个额外的 输出(4 至 20 mA),以及 4 条用于车辆内部通讯的 CAN 总 线,RC36‑20 为行走机械上的所有功能提供高性能的平台。 系列 30 BODAS RC 控制器内部包含高性能的 32 位三核微处 理器以及所有输入和输出电路。模拟电压的范围是 0 至 10 V 和 0 至 32 V,电流范围是 0 至 20 mA,频率范围是 0 Hz 至 10 kHz,及开关信号视为输入信号进行处理。另外,RC3620 为力士乐的智能传感器提供特别输入,例如,具有集成 诊断功能或电阻输入为 700 至 2000 Ω 的 DSM1-10 速度传 感器,以及直接连接的温度传感器。保护输入不会过电压, 并不受电气干扰。可对电压输入进行监控,以检测电缆断 连或短路情况。对电流控制的比例线圈输出进行脉宽调制 (PWM),并对其提供温度和电压补偿,以保证高精确度和 最小滞后。它们针对力士乐的轴向柱塞单元和阀的电气比例 控制进行过优化协调。切换输出设计为继电器和切换线圈的 直接切换。此外,输出具有集成电压和电流监控。 所有的 BODAS 控制器 RC 均配有 CAN 总线接口,用以与其 他总线用户或电子系统(例如,RC 或 RCE,操纵杆,柴油 发动机喷射及显示器)交换数据。RC36-20 BODAS 控制器 拥有四个独立的 CAN 总线接口用来通讯,每个接口都可使用 多种协议进行操作。与 BODAS 设计及 BODAS 服务软件的 通讯同样是通过 CAN 总线进行并基于标准关键字协议 2000 (KWP 2000)。 BODAS 设计软件根据行业标准 IEC 61131-3 对 BODAS 控 制器进行简单灵活的编程,并对 RC36-20 编程进行了方便快 捷的介绍。利用 BODAS 设计能够方便地开发并清楚地展示 众多复杂的应用程序。 在使用 C 编程语言时,可利用一个 C-API 形式的应用程序 接口,充分挖掘 RC36-20 BODAS 控制器的性能。通过使用 它,软件开发商可专注于其机器的重要功能,而无需对三核 技术的细节问题投入过多精力。 使用 BODAS 服务软件,可通过闪存模块将程序快速, 简单地下载到控制器上。BODAS 服务软件通过图形化的 Windows 界面提供了扩展服务功能,如诊断,参数设置或过 程变量显示。这就使参数设置和诊断简单化,从而快速,安 全地将机器投入运行。 BODAS RC 控制器专为在行走机械中使用而开发,并可满足 其对环境温度,水和尘土侵入,冲击和振动以及电磁兼容性 (EMC)方面的相应安全要求。 BODAS RC 控制器和配套的软件,与力士乐的泵,电机, 阀,传感器,输入设备以及执行机构联合使用,可开发出完 整的系统解决方案。 用 RC36-20 可实现双通道停用(停止功能)。为此,需要遵 守相应开发准则。
力士乐A11VLO资料说明书课件.ppt
油泵的常见故障现象及原因(针对A11VOLRDS、A11VODRS泵)
2、操作执行机构,油泵没有压力或只有待命压力。
检查电机旋向,以及油箱液位。 检查油泵X口压力,是不是没有反馈压力。 LS阀卡死在全开位置或完全拧松。 DR阀-压力切断阀卡死在全开位置或者调节不当,清洗和调节。 油泵损坏。
A11VLO...LRDS
负载敏感压差 压力切断
最小排量调节
功率调 节螺钉
A11VO 2162-e / VAV 08.99
最大排量调节
A11VO Controllers Load Sensing
LRDS
Dp
主控制阀块 M4, M7 (负载感应节流孔)
orifice
负载感应 压力切断 功率调节
A11VO 2178-e / 10.99
液压介质不相容。例如,磷酸脂用丁腈橡胶密封,两者发生化学反 应。表象是泄漏处有絮状物。
联轴器没装好,有侧向力引起轴封单边磨损而漏油。表象是明显的 一侧磨损,另一侧没有磨损。
自然老化,失去弹性。表面龟裂,裂口。
油泵的常见故障现象及原因(针对A11VOLRDS、A11VODRS泵) 5、噪音、发热、泵损坏问题。
油泵的常见故障现象及原因(针对A11VOLRDS、A11VODRS泵)
3、油泵输出流量不足 。
油泵磨损,泄露量超标。 LR恒功率阀调节不当,功率设定值太小。重新调节 驱动电机转速丢失。 油泵最大流量调节不对。向外松,排量加大;向里紧,排量减小。
油泵的常见故障现象及原因(针对A11VOLRDS、A11VODRS泵)
力士乐驱动器使用说明.
力士乐驱动器使用说明书本说明书针对非正弦用力士乐驱动器。
主要讲述驱动软件的使用、参数配置、PID调节等。
一、软件使用1.MLC04v16软件的安装安装文件夹内有CD1、CD2、CD3三个文件夹,打开CD1文件夹,⏹双击setup.exe进行安装,如图所示选择英文后,点Next⏹按如图所示选择,点Next。
⏹点击Next⏹点击Next⏹选择接受,后点击Next⏹输入名称,点击Next⏹选择安装目录,然后点击Next⏹点Install⏹安装进度如下:真个过程可能要10多分钟,看电脑性能。
⏹完成窗口如下:⏹完成后需要重启。
点”是”自动重启,点”否”则不重启。
2.软件操作⏹打开软件●双击桌面快捷方式,如下图所示。
●通过点击开始菜单->程序->Rexroth->IndraWorks7.14.166.0->Engineering.来打开。
⏹软件使用●工程的使用如下图点击Create an empty project为建立一个新工程。
点击Open project打开一个现有工程。
点击Scan for devices扫描串口总线上的设备点击Restore project把保存的已压缩工程,解压缩。
点击下面快捷按钮,第一个为新建工程,第二个位打开现有工程。
点击File下拉菜单后,New:新建工程;Open:打开工程。
与伺服启动器联机打开工程后变为点黄色图标进入虚拟模式。
点蓝色图标连接实际驱动器。
如果端口配置正常则直接联机,否则会弹出如下窗口。
点击Scan for Device后弹出如下窗口点Next后自动寻找设备。
未找到设备则弹出下面创库示波器功能点Diagnostics下拉菜单,点击Oscilloscope下图所示为示波器窗口。
采集时间配置:点击右上角的Configure后弹出,时间配置。
其中Memory depth,采集的点数Time period:每10ms采集一个点Recording time:前面两项相乘得出的总采样时间。
力士乐 IndraDrive 伺服控制器功率单元 HCS01 使用说明书
Instruction ManualElectric Drives and ControlsPneumatics ServiceLinear Motion andAssembly TechnologiesHydraulicsRexroth IndraDrive Drive ControllersPower Sections HCS01R911325518Edition 06Rexroth IndraDrive Drive Controllers Power Sections HCS01Instruction ManualDOK-INDRV*-HCS01*UL***-IB06-EN-PRS-49e64cb2ef966abc0a6846a001598e31-8-en-US-2EditionRelease Date Notes DOK-INDRV*-HCS01*UL***-IB01-EN-P 09/2009First edition DOK-INDRV*-HCS01*UL***-IB02-EN-P 07/2010Corrected edition DOK-INDRV*-HCS01*UL***-IB03-EN-P 05/2011Corrected edition DOK-INDRV*-HCS01*UL***-IB04-EN-P 01/2012Corrected edition DOK-INDRV*-HCS01*UL***-IB05-EN-P 05/2012Corrected edition DOK-INDRV*-HCS01*UL***-IB06-EN-P05/2014Corrected editionPurpose of DocumentationThis documentation provides information on the installation and operation of the described products, by persons trained and qualified to work with electri‐cal installations.Copyright© Bosch Rexroth AG 2014This document, as well as the data, specifications and other information set forth in it, are the exclusive property of Bosch Rexroth AG. It may not be re‐produced or given to third parties without its consent.LiabilityThe specified data is intended for product description purposes only and shall not be deemed to be a guaranteed characteristic unless expressly stipulated in the contract. All rights are reserved with respect to the content of this docu‐mentation and the availability of the product.Published byBosch Rexroth AGBgm.-Dr.-Nebel-Str. 2 ■ 97816 Lohr a. Main, Germany Phone +49 9352 18 0 ■ Fax +49 9352 18 8400/DC-IA/EDY4 (CR)TitleType of Documentation Document Typecode Internal File ReferenceRecord of RevisionBosch Rexroth AGDOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Table of ContentsPage1Important Notes (3)1.1 Safety Instructions.................................................................................................................................. 31.1.1 General Information............................................................................................................................. 31.1.2 Protection Against Contact with Electrical Parts and Housings........................................................... 41.1.3 Battery Safety...................................................................................................................................... 51.2Appropriate Use (6)2Ratings and Dimensions (7)2.1 Data........................................................................................................................................................ 72.2Dimensional Drawings (11)3Documentations (15)3.1Motors (15)4Instructions for Use (17)4.1 Overcurrent Protection.......................................................................................................................... 174.2 Connection............................................................................................................................................ 184.2.1 Connection Diagram.......................................................................................................................... 184.2.2Connection Points (19)5 Service and Support .................................................................................................... 21Index . (23)DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG I/25Table of ContentsBosch Rexroth AG DOK-INDRV*-HCS01*UL***-IB06-EN-P II/25Rexroth IndraDrive Drive Controllers Power Sections HCS011Important Notes1.1Safety Instructions1.1.1General Information●Do not attempt to install and operate the components of the electric drive and control system without first reading all documentation provided with the product. Read and understand these safety instructions and all user documentation prior to working with these components. If you do not have the user documentation for the components, contact your re‐sponsible Rexroth sales partner. Ask for these documents to be sent im‐mediately to the person or persons responsible for the safe operation of the components.●If the supplied documents contain some information you do not under‐stand, it is absolutely necessary that you ask Rexroth for explanation before you start working at or with the components.●If the component is resold, rented and/or passed on to others in any oth‐er form, these safety instructions must be delivered with the component in the official language of the user's country.●Only qualified persons may work with components of the electric drive and control system or within its proximity.In terms of this Instruction Manual, qualified persons are those persons who are familiar with the installation, mounting, commissioning and op‐eration of the components of the electric drive and control system, as well as with the hazards this implies, and who possess the qualifications their work requires. To comply with these qualifications, it is necessary,among other things,–to be trained, instructed or authorized to switch electric circuits and components safely on and off, to ground them and to mark them,–to be trained or instructed to maintain and use adequate safety equipment,–to attend a course of instruction in first aid.●The technical data, connection and installation conditions of the compo‐nents are specified in the respective application documentations and must be followed at all times.●If the components take the form of hardware, then they must remain in their original state, in other words, no structural changes are permitted.It is not permitted to decompile software components or alter source co‐des.●Do not mount damaged or faulty components or use them in operation.●Only use accessories and spare parts approved by Rexroth.●Follow the safety regulations and requirements of the country in which the electric components of the electric drive and control system are op‐erated.●Proper and correct transport, storage, mounting and installation, as well as care in operation and maintenance, are prerequisites for optimal and safe operation of the component.Improper use of these components, failure to follow the safety instructions in this document or tampering with the product, including disabling of safety de‐vices, could result in property damage, injury, electric shock or even death.DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG 3/25Important Notes1.1.2Protection Against Contact with Electrical Parts and HousingsThis section concerns components of the electric drive and con‐trol system with voltages of more than 50 volts .Contact with parts conducting voltages above 50 volts can cause personal danger and electric shock. When operating components of the electric drive and control system, it is unavoidable that some parts of these components conduct dangerous voltage.High electrical voltage! Danger to life, risk of injury by electric shock or seri‐ous injury!●Only qualified persons are allowed to operate, maintain and/or repair the components of the electric drive and control system.●Follow the general installation and safety regulations when working on power installations.●Before switching on, the equipment grounding conductor must have been permanently connected to all electric components in accordance with the connection diagram.●Even for brief measurements or tests, operation is only allowed if the equipment grounding conductor has been permanently connected to the points of the components provided for this purpose.●Before accessing electrical parts with voltage potentials higher than 50 V, you must disconnect electric components from the mains or from the power supply unit. Secure the electric component from reconnec‐tion.●With electric components, observe the following aspects:Always wait 30 minutes after switching off power to allow live capacitors to discharge before accessing an electric component. Measure the elec‐trical voltage of live parts before beginning to work to make sure that the equipment is safe to touch.●Install the covers and guards provided for this purpose before switching on.●Never touch electrical connection points of the components while power is turned on.●Do not remove or plug in connectors when the component has been powered.●Under specific conditions, electric drive systems can be operated at mains protected by residual-current-operated circuit-breakers sensitive to universal current (RCDs/RCMs).●Secure built-in devices from penetrating foreign objects and water, as well as from direct contact, by providing an external housing, for exam‐ple a control cabinet.High housing voltage and high leakage current! Danger to life, risk of injury by electric shock!●Before switching on and before commissioning, ground or connect the components of the electric drive and control system to the equipment grounding conductor at the grounding points.Bosch Rexroth AGDOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS014/25Important Notes●Connect the equipment grounding conductor of the components of the electric drive and control system permanently to the main power supply at all times. The leakage current is greater than 3.5 mA.●Establish an equipment grounding connection with a minimum cross section according to the table below. With an outer conductor cross sec‐tion smaller than 10 mm 2 (8 AWG), the alternative connection of two equipment grounding conductors is allowed, each having the same cross section as the outer conductors.Cross section outer con‐ductorMinimum cross section equipment grounding conductorLeakage current ≥ 3.5 mA1 equipment groundingconductor2 equipment groundingconductors 1.5 mm 2 (16 AWG)10 mm 2 (8 AWG)2 × 1.5 mm 2 (16 AWG)2.5 mm 2 (14 AWG) 2 × 2.5 mm 2 (14 AWG)4 mm 2 (12 AWG) 2 × 4 mm 2 (12 AWG)6 mm 2 (10 AWG) 2 × 6 mm 2 (10 AWG)10 mm 2 (8 AWG)-16 mm 2 (6 AWG)16 mm 2 (6 AWG)-25 mm 2 (4 AWG)-35 mm 2 (2 AWG)-50 mm 2 (1/0 AWG)25 mm 2 (4 AWG)-70 mm 2 (2/0 AWG)35 mm 2 (2 AWG)-.........Tab. 1-1:Minimum Cross Section of the Equipment Grounding Connection1.1.3 Battery SafetyBatteries consist of active chemicals in a solid housing. Therefore, improper handling can cause injury or property damage.Risk of injury by improper handling!●Do not attempt to reactivate low batteries by heating or other methods (risk of explosion and cauterization).●Do not attempt to recharge the batteries as this may cause leakage or explosion.●Do not throw batteries into open flames.●Do not dismantle batteries.●When replacing the battery/batteries, do not damage the electrical parts installed in the devices.●Only use the battery types specified for the product.DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG 5/25Important NotesEnvironmental protection and disposal! The batteries contained inthe product are considered dangerous goods during land, air, andsea transport (risk of explosion) in the sense of the legal regula‐tions. Dispose of used batteries separately from other waste. Ob‐serve the national regulations of your country.1.2 Appropriate UseThis product may only be used for the mentioned applications under thespecified application, ambient and operating conditions.This product is exclusively intended for use in machines and systems in anindustrial environment. This is to be understood as applications according toIEC 60204-1 "Safety of machinery, Electric equipment of machines" andNFPA 79 "Electrical Standard for Industrial Machinery".Components of the Rexroth IndraDrive Cs system are products ofcategory C3(with limited availability) according to IEC 61800‑3.To ensure that this category (limit values) is maintained, suitableline filters must be used in the drive system.These components are not provided for use in a public low-volt‐age network supplying residential areas with power. If these com‐ponents are used in such a public network, high-frequency inter‐ference is to be expected. This can require additional measuresof radio interference suppression.Bosch Rexroth AG DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01 6/25Important Notes2Ratings and Dimensions2.1DataUL Ratings and DimensionsDescriptionSymbolUnitHCS01.1E -W0003-_-02HCS01.1E -W0006-_-02HCS01.1E -W0009-_-02HCS01.1E -W0013-_-02HCS01.1E -W0018-_-02Listing in accordance with UL standardUL 508C Listing in accordance with CSA standard C22.2 No. 14-10UL files E134201Pollution degree2Ambient temperature with nominal dataT amax °C 40Ambient temperature with reduced nominal data T amax_red°C 55Massm kg 0,721,70Device height 1)H mm 215268Device depth 2)T mm 196Device width 3)B mm 5070Minimum distance on the top of the device 4)d top mm 90Minimum distance on the bottom of the device 5)d bot mm 90Horizontal spacing on the device 6)d hor mm 10Rated control voltage input 7)U N3V 24 ± 20%Rated power consumption control voltage input at U N38)P N3W 272834Short circuit current rating SCCR A rms 42000Rated input voltage, power 9)U LN_nennV 1 or 3 x AC 110 (230)Tolerance U LN %± 10Mains frequencyf LNHz 50...60Tolerance input frequency Hz± 2Rated input currentI LNA1.8 or 0.62.8 or 1.2 5.0 or 2.38.3 or 4.512.8 or 9.6Branch circuit protection fuse 10)2.5 or 1.03.5 or 2.07.0 or 3.012.0 or 5.017.5 or15.0Last modification: 2013-12-12DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG 7/25Ratings and DimensionsDescriptionSymbol UnitHCS01.1E -W0003-_-02HCS01.1E -W0006-_-02HCS01.1E -W0009-_-02HCS01.1E -W0013-_-02HCS01.1E -W0018-_-02Required wire size in accordancewith NFPA 79 and UL 508 A (in‐ternal wiring);11)A LN AWGAWG 14Field wiring material (material;conductor temperature; class)Cu; 60/75 °C; 1Output voltage U out V 3 x AC 0 (230)Output currentI out A 1,12,03,04,57,6Output frequency range 12)f out Hz 0...1600Power dissipation at continuous current and continuous DC bus power respectively 13)P Diss_contW8,0010,0012,0020,0070,00Last modification: 2013-12-121) 2) 3)Housing dimension; see also related dimensional drawing 4) 5) 6)See fig. "Air Intake and Air Outlet at Device"7)Observe supply voltage for motor holding brakes8)HMS, HMD, HCS: Plus motor holding brake and control sec‐tion; HCS01: Incl. control section, plus safety option; KCU:Max. power consumption from 24V supply; KSM: Incl. motor holding brake (if available), plus power consumption of exter‐nally connected inputs/outputs, plus safety option; KMS: Plus motor holding brake, plus power consumption of externally connected inputs/outputs, plus safety option9)Mains input L1, L2, L3 (for HMV and HCS only); For use on a solidly grounded wye source only.10)Use listed AC input line fuses (class J; 600 V AC). Suitable for use on a circuit capable of delivering not more than 42000 rms symmetrical amperes, 500 Volts maximum (HMV and HCS04.2480 Volts maximum). If using inverse-time circuit breakers or type E combination motor controllers instead of recommended fuses, see UL 508C section 45.8.2.11)Copper wire; PVC-insulation (conductor temperature 90 °C;T a ≤ 40 °C) in accordance with NFPA 79 chapter 12 and UL 508A chapter 2812)Depending on switching frequency which was set in parameter P‑0‑000113)Plus dissipation of braking resistor and control sectionTab. 2-1:HCS - UL Ratings and DimensionsUL Ratings and DimensionsDescriptionSymbolUnitHCS01.1E -W0005-_-03HCS01.1E -W0008-_-03HCS01.1E -W0018-_-03HCS01.1E -W0028-_-03HCS01.1E -W0054-_-03Listing in accordance with UL standardUL 508C Listing in accordance with CSA standardC22.2 No. 14-10Last modification: 2013-12-12Bosch Rexroth AGDOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS018/25Ratings and DimensionsDescription Symbol UnitHCS01.1E -W0005-_-03HCS01.1E -W0008-_-03HCS01.1E -W0018-_-03HCS01.1E -W0028-_-03HCS01.1E -W0054-_-03UL files E134201Pollution degree2Ambient temperature with nominaldataT amax °C 40Ambient temperature with reduced nominal data T amax_red°C 55Massm kg 0,721,704,22Device height 1)H mm 215268Device depth 2)T mm 196Device width 3)B mm 5070130Minimum distance on the top of the device 4)d top mm 90Minimum distance on the bottom of the device 5)d bot mm 90Horizontal spacing on the device 6)d hor mm 10Rated control voltage input 7)U N3V 24 ± 20%Rated power consumption control voltage input at U N38)P N3W 27283445Short circuit current rating SCCR A rms 42000Rated input voltage, power 9)U LN_nennV 3 x AC 200 (500)Tolerance U LN %± 10Mains frequencyf LNHz 50...60Tolerance input frequency Hz± 2Rated input currentI LNA1,52,55,010,028,0Branch circuit protection fuse 10)24101530Required wire size in accordance with NFPA 79 and UL 508 A (in‐ternal wiring);11)A LNAWGAWG 14AWG 10Field wiring material (material;conductor temperature; class)Cu; 60/75 °C; 1Output voltage U out V 3 x AC 0 (500)Output currentI out A 1,72,77,611,521,0Output frequency range 12)f out Hz 0...1600Power dissipation at continuous current and continuous DC bus power respectively 13)P Diss_contW37,0046,0080,00120,00400,00Last modification: 2013-12-121) 2) 3)Housing dimension; see also related dimensional drawingRexroth IndraDrive Drive Controllers Power Sections HCS01Ratings and Dimensions4) 5) 6)See fig. "Air Intake and Air Outlet at Device"7)Observe supply voltage for motor holding brakes8)HMS, HMD, HCS: Plus motor holding brake and control sec‐tion; HCS01: Incl. control section, plus safety option; KCU:Max. power consumption from 24V supply; KSM: Incl. motor holding brake (if available), plus power consumption of exter‐nally connected inputs/outputs, plus safety option; KMS: Plus motor holding brake, plus power consumption of externally connected inputs/outputs, plus safety option9)Mains input L1, L2, L3 (for HMV and HCS only); For use on a solidly grounded wye source only.10)Use listed AC input line fuses (class J; 600 V AC). Suitable for use on a circuit capable of delivering not more than 42000 rms symmetrical amperes, 500 Volts maximum (HMV and HCS04.2480 Volts maximum). If using inverse-time circuit breakers or type E combination motor controllers instead of recommended fuses, see UL 508C section 45.8.2.11)Copper wire; PVC-insulation (conductor temperature 90 °C;T a ≤ 40 °C) in accordance with NFPA 79 chapter 12 and UL 508A chapter 2812)Depending on switching frequency which was set in parameter P‑0‑000113)Plus dissipation of braking resistor and control sectionTab. 2-2:HCS - UL Ratings and DimensionsDistancesA Air intakeB Air outletC Mounting surface in control cabinet d top Distance top d bot Distance bottom d horDistance horizontalFig. 2-1:Air Intake and Air Outlet at DeviceRexroth IndraDrive Drive Controllers Power Sections HCS01Ratings and Dimensions2.2 Dimensional DrawingsHCS01.1E-W0003/5/6/8/9/13Standard mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-2:Dimensional Drawing HCS01.1E-W0003/5/6/8/9/13 (Standard Mount‐ing)Left-hand or right-hand mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-3:Dimensional Drawing HCS01.1E-W0003/5/6/8/9/13 (Left-Hand or Right-Hand Mounting)Rexroth IndraDrive Drive Controllers Power Sections HCS01Ratings and DimensionsHCS01.1E-W0018/28Standard mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-4:Dimensional Drawing HCS01.1E-W0018/28 (Standard Mounting)Left-hand or right-hand mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-5:Dimensional Drawing HCS01.1E-W0018/28 (Left-Hand or Right-Hand Mounting)Rexroth IndraDrive Drive Controllers Power Sections HCS01Ratings and DimensionsHCS01.1E-W0054Standard mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-6:Dimensional Drawing HCS01.1E-W0054 (Standard Mounting)Left-hand or right-hand mounting:A Minimum mounting clearanceB Boring dimensions CMounting surfaceFig. 2-7:Dimensional Drawing HCS01.1E-W0054 (Left-Hand or Right-Hand Mounting)Rexroth IndraDrive Drive Controllers Power Sections HCS01Ratings and DimensionsRexroth IndraDrive Drive Controllers Power Sections HCS01Rexroth IndraDrive Drive Controllers Power Sections HCS01Documentations 3 Documentations3.1 Motors1)In the document typecodes, "xx" is a wild card for the currentedition of the documentation (example: PR01 is the first editionof a Project Planning Manual)Tab. 3-1:Documentations – MotorsRexroth IndraDrive Drive Controllers Power Sections HCS01Rexroth IndraDrive Drive Controllers Power Sections HCS01Instructions for Use 4 Instructions for Use4.1 Overcurrent ProtectionProtect the components against overcurrent:●Branch circuit protection has to be provided externally●Dimension the branch circuit protection according to the data "Branchcircuit protection fuse" (see Ratings and Dimensions)4.2Connection4.2.1Connection Diagram*Optional**ECONOMY = sercos III; BASIC = Multi-Ethernet; ADVANCED = sercos III cross communication (CCD)***Only available at HCS01.1E-W00**-A-0*-A-CC (ADVANCED)devicesX6.1, X6.2T1 and T2 are not available at MSM motors. For proper func‐tion of the motor thermal management connect the motor ther‐mal sensor as described in the wiring diagram. Otherwise mo‐tor overtemperature sensing is not provided by the drive. For Rexroth motors with data memory in the motor encoder, such as MSK, the motor overload protection level is set automatical‐ly while connecting the motor to the drive. There is no adjust‐ment necessary. Otherwise refer to the Rexroth firmware docu‐mentation.X31No standard assignment preset; make the assignment bymeans of firmware documentation (see Functional Description,index entry "Digital inputs/outputs")X47.1, X47.2For the "ready for operation" message of the device, the Bb re‐lay contact (X47.1, X47.2) must be wiredX47.3…6Module bus only available at HCS01.1E-W00xx-x-03 devices X77DC bus connection (L+, L-) only available atHCS01.1E‑W00xx‑x‑03 devicesFig. 4-1:Connection DiagramRexroth IndraDrive Drive Controllers Power Sections HCS01Instructions for Use4.2.2 Connection PointsSymbols used to describe the connection pointsScrew ter‐minal blockSpring ter‐minalD-SubRJ-45IndustrialMini I/OThread Max. con‐nectioncross sec‐tionStrippedlengthMax. tighten‐ing torqueTab. 4-1:SymbolsConnection point HCS01mm2 (AWG)mm NmA, B, C M5-5 X3 A 1)2,5 (14)80,6B 2)6,0 (10)100,8C 3)10,0 (8)141,7X4A, B, C---X5A2,5 (14)80,6B6,0 (10)100,8C10,0 (8)141,7 X6A, B, C1,5 (16)10-X8A, B, C---X9A, B, C- 5)---X13A, B, C2,5 (14)10-X22 P2, X23 P1A, B, C---X24 P2, X25 P1A, B, C---X26A, B, C---X30A, B, C---X31A, B, C1,5 (16)10-X32A, B, C1,5 (16)10-X37A, B, C1,5 (16)10-X38A, B, C1,5 (16)10-X41A, B, C1,5 (16)10-X42, X43A, B, C---X47A, B, C1,5 (16)10-X49A, B, C1,5 (16)8-DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG19/25Instructions for UseConnection point HCS01mm2 (AWG)mm Nm X61A, B, C---X77 D 4) 6 (8)15-1)A: HCS01.1E-W0003…W0013-x-02, -W0005-x-03,‑W0008‑x‑032)B: HCS01.1E-W0018-x-02, -W0018-x-03, -W0028-x-033)C: HCS01.1E-W0054-x-034)D: HCS01.1E-W00xx-x-035)Connector available at braking resistorTab. 4-2:Connection PointsBosch Rexroth AG DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01 20/25Instructions for Use5 Service and SupportOur worldwide service network provides an optimized and efficient support.Our experts offer you advice and assistance should you have any queries.You can contact us 24/7.Service GermanyOur technology-oriented Competence Center in Lohr, Germany, is responsi‐ble for all your service-related queries for electric drive and controls.Contact the Service Helpdesk & Hotline under:Phone:+49 9352 40 5060Fax:+49 9352 18 4941E-mail:***************************Internet:Additional information on service, repair (e.g. delivery addresses) and training can be found on our internet sites.Service worldwide Outside Germany, please contact your local service office first. For hotline numbers, refer to the sales office addresses on the internet.Preparing informationTo be able to help you more quickly and efficiently, please have the following information ready:●Detailed description of malfunction and circumstances resulting in the malfunction●Type plate name of the affected products, in particular type codes and serial numbers●Your contact data (phone and fax number as well as your email ad‐dress)DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG 21/25Service and SupportBosch Rexroth AG DOK-INDRV*-HCS01*UL***-IB06-EN-P 22/25Rexroth IndraDrive Drive Controllers Power Sections HCS01IndexAAdditional documentations (15)Ambient conditions (7)Appropriate use (6)C Connection (18)Connection diagram (18)Connection pointsHCS01 (19)DDataHCS01, dimensional drawings (11)HCS01, dimensions (11)Dimensional drawingHCS01.1E-W0003/5/6/8/9/13 (11)HCS01.1E-W0018/28 (12)HCS01.1E-W0054 (13)Dimensional drawingsHCS01 (11)Dimensions (7)HCS01.1E-W0003/5/6/8/9/13 (11)HCS01.1E-W0018/28 (12)HCS01.1E-W0054 (13)Distances (10)DocumentationAdditional documentations (15)Motors (15)Overview (15)Reference documentations (15)HHCS01Dimensional drawings (11)Dimensions (11)Technical data (7)IInstructions for use (17)MMotorDocumentation (15)OOperating conditions (7)Overcurrent protection (17)PPower consumption (7)R Ratings..................................................................7Reference documentations (15)SSafety instructions (3)SupportSee service hotline (21)TTechnical data (7)UUL ratings (7)UseAppropriate (6)Instructions (17)VVoltage load capacity (7)XX3 (19)X4 (19)X5 (19)X6 (19)X8 (19)X9 (19)X13 (19)X22, X23 (19)X24, X25 (19)X26 (19)X30 (19)X31 (19)X32 (19)X37 (19)X38 (19)X41 (19)X42, X43 (19)X47 (19)X49 (19)X61 (19)X77 (19)DOK-INDRV*-HCS01*UL***-IB06-EN-PRexroth IndraDrive Drive Controllers Power Sections HCS01Bosch Rexroth AG23/25Index。
力士乐HNC100(3系列)英文手册

1/20Digital axis controlType VT-HNC100Component series 3XRE 30139/11.10Replaces: 05.10Table of contentsH7642Content PageFeatures 2Ordering code3Software project planning4Overview of the controller functions 5System overview6System overview, interfaces 7Technical data 8 to 11Pinout12 to 16Unit dimensions17Project planning / Maintenance instructions / Additional information18The SERCOS variant formerly described in this data sheet can now be found in data sheet 30159.FeaturesThe digital axis control VT-HNC100...3X is a programma-ble NC control for up to four controlled axes. It complies with the specific requirements for closed-loop control of hydraulic drives.The VT-HNC100...3X is designed for being used in rough in-dustrial environments as regards to interference immunity, mechanical vibration, shock, and climate resistance.Fields of application– Machine tools– Plastics processing machines– Special machines– Presses– Transfer systemsTechnology functions– Sequence programming– Positioning– Pressure/force control– Differential pressure control– Synchronization– Curves– CamsHydraulic axes– Measurement system:• Incremental or absolute (SSI)• Analog 0 to ±10 V and 4 to 20 mA– Actuating variable output voltage or current– Freely configurable controller variants• Position/pressure/force/velocity controller• Path-dependent braking• Substitutional closed-loop control (position/force)• Synchronization control of up to 4 axes also in groups Programming– User programming using a PC– NC language with subroutine technology and conditional jumps– 1 NC program per axis for functional sequences– 1 axes-spanning auxiliary routine– Variable setting of the NC processing velocity– Variable setting of the controller scan timesOperation– Comfortable administration of the machine and measuring data on a PCProcess connection– Digital inputs and outputs,– Analog inputs and outputs,– PROFIBUS DP, PROFIBUS DP in Motorola format, CANopen for the communication with a superior control (for CANopen, there is no standard EDS file available)– PROFINET RTAssembly– Top hat rail 35 mmCE conformity– CE conformity according to EMC directive 2004/108/EC and EMVG (Act on electro-magnetic compatibility of operat-ing media) from February 26, 2008Applied harmonized standards:EN 61000-6-2:2005EN 61000-6-3:2007More information/hnc100Ordering codeVT-HNC100= Serial unitVersion Compact for 1 axis with SSI sensor= C Version for 1 hydraulic axis = 1Version for 2 hydraulic axes = 2Version for 3 hydraulic axes = 3Version for 4 hydraulic axes= 4Component series 30 to 39= 3X(30 to 39: unchanged technical data and pinout)Option000 = without synchronizationG02 = Synchronization 2-axis version G03 = Synchronization 3-axis version G04 = Synchronization 4-axis version00 = No fitting E0 =TCP/IP 1)Position transducer 2)I = Incremental/SSI (standard)S = SSI, only for design “C = Compact”Bus connection P = PROFIBUS DPC = CANopenN =PROFINET RT 3)VT-HNC1003XIncluded within the scope of delivery:Mating connector for– X1S (Type Phoenix Mini Combicon 3-pole),– X2D (Type Phoenix Micro Combicon 8-pole or Phoenix Mini Combicon 12-pole), – X2A (Type Phoenix Micro Combicon 8-pole or HD-SUB 15-pole),– X8M (Type Phoenix Micro Combicon 8-pole or HD-SUB 15-pole)Recommended accessories (can be ordered separately)DescriptionMaterial number Interface cable RS232 (1:1), length 3 m R900776897USB-RS232 converterR901066684Cable set VT17220-1X/HNC100-3X, length 2 m,for analog signals (connection X2A) or digital position measurement systems (connec-tion X8M) with HD connector and open breakout cable for:VT-HNC100-1-3X, VT-HNC100-2-3X, VT-HNC100-3-3X, VT-HNC100-4-3XR901189300Cable set VT17220-1X/HNC100-3X length 2 m,for analog signals (connection X2A) or digital position measurement systems (connec-tion X8M) with FK-MC connector and open breakout cable for VT-HNC100-C-3X R901189302Plug-in connector type 6ES7972-0BA41-0XA0 for PROFIBUS DPR9000501521) Only in connection with PROFIBUS DP for 1, 2 and 4 axisversions2) All axis electronics are fitted with the same position trans-ducer analysis3) Only for 1, 2 and 4 axis versions, not for the compact versionVersions without bus connection are not available.Order options “N” and “E0” for 3 axis version are being prepared.Standard types TypeMaterial number VT-HNC100–C–3X/P-S-00/000R901134618VT-HNC100-1–3X/P-I-00/000R901134614VT-HNC100-2–3X/P-I-00/000R901108539VT-HNC100-3–3X/P-I-00/000R901134620VT-HNC100-4–3X/P-I-00/000R901108538Software project planningProject planningDeveloping application-specific data sets forms the basis for the function of the VT-HNC100...3X. These data sets are gen-erated on the PC and sent to VT-HNC100...3X. The connec-tion of user program and data sets is called project. This soft-ware project planning is implemented according to fix steps: 1. The tasks of the VT-HNC100...3X are defined and recorded in a flow chart. In this connection, the meaning of the inputs and outputs and the used parameters is defined.2. The functions of the flow chart are implemented in a series of NC commands.3. The machine data (selection of transducers and controllers) and the parameters of the NC program are defined.4. The data is sent to the VT-HNC100...3X.5. The setting and the program sequence are optimized at the machine.For detailed information on the generation of a project please refer to the document “First steps”.PC programs “WIN-PED 7” and “WIN-PED 6”For the implementation of the project planning tasks, two WIN-PED programs are available to the user.WIN-PED 7 is suitable for all HNC variants mentioned in this document except for CANopen.WIN-PED 6 is suitable for all HNC variants mentioned in this document except for the options PROFINET RT and PROFIBUS DP with TCP/IP.Projects generated with WIN-PED 6 are not compatible with WIN-PED 7 and vice-versa.Scope of delivery for WIN-PED:– Comfortable dialog functions for setting the machine data online or offline– NC editor with integrated syntax test and program compiler – Support for the definition of the parameters used in the NC program– Dialog window for setting the parameter values online– Comprehensive options for displaying process variables, digital inputs, outputs, and markers– Recording and graphical presentation of up to 16 process variables with great selection of trigger options– Dialog for the graphical definition of special functions (de-termination of the function via polygonal sequence)– Bus manager for the configuration of data exchange (PROFIBUS DP, PROFINET RT) with superior control System requirements:– IBM PC or compatible system– Windows XP for WIN-PED 6– Windows XP or Windows 7 for WIN-PED 7– Random access memory (512 MB recommended)– 100 MB free hard disk capacity as per control type– RS 232 interface for the connection of VT-HNC100...3X, for the PROFINET RT or PROFIBUS DP, also the network interface TCP/IP can be usedNote:The WIN-PED 6/WIN-PED 7 is not included in the scopeof delivery. It can be downloaded from the Internet free of charge, or ordered as CD, Material number R900725471! Download in the Internet: /hnc100 Inquiries: support.nc-systems@boschrexroth.deOverview of the controller functionsPosition controller:– PDT1 controller– Linear amplification characteristic curve– Direction-dependent gain adaptation– Gain modification via the NC program possible– Adaptation of the valve characteristic curve– Fine positioning– Residual voltage principle– Compensation of zero point errors– State feedback via• Pressure,• Pressure differential• Position– Command value provision– Limitation of the actuating variable via the NC program – “Path-dependent braking”– Intermediate electronics when using commercially available NC controls– Synchronization control Pressure/force controller:– PIDT1 controller– I component switchable via window– Pressure differential analysis– Own scan timeVelocity controller:– PI controller– I component switchable via windowSynchronization controller (up to 4 axes):– Master-slave principle– Mean principleMonitoring functions:– Dynamic tracking error monitoring– Traversing range limits (electronic limit switches)– Cable break monitoring for incremental and SSI encoder – Cable break monitoring for sensors with output 4 to 20 mA6/20 Bosch Rexroth AG HydraulicsVT-HNC100...3X RE 30139/11.10System overview(example)Digital inputs/outputs or bus system(PROFIBUS DP, CANopen, PROFINET RT)Superior control (PLC or PC) and visualization (HMI)PC PLC HMIGlobal busCPU + 4 axes VT-HNC100-4-3XCPU + 3 axes VT-HNC100-3-3XCPU + 2 axes VT-HNC100-2-3XCPU + 1 axis VT-HNC100-1-3XCompact 1 axis VT-HNC100-C-3X712635System overview, interfaces (example)1 Single-rod cylinder2 Integrated position measurement system3 Proportional servo valve with integrated control electronics4 VT-HNC100-1-3X/N...5 Connection cable6 Pressure transducer7 Sandwich plate isolator valve (with plug-in switching amplifier)Operating voltage 1)UB 18 to 30 VDC, residual ripple < 1.5 VppCurrent consumption at 24 VDC I approx. 500 mA Processor32 bit power PC Analog inputs (AI):– Voltage input (reference to AGND - Analog ground)• Channel number1• Input voltage UE max +12 V to –12 V (+10 V to –10 V measurable)• Input resistance RE 200 kΩ ± 5 %• Resolution 5 mV• Non-linearity< 0.2 %• Calibration tolerance 2)max. 40 mV (with factory settings)– Current inputs• Channel number2• Input current IE 4 mA to 20 mA• Input resistance RE 225 Ω at 20 °C (100 Ωmeasuring resistance)• Leakage current IV 0.1 to 0.4 % (at 100 Ω between pin 2 or pin 3 (Cin1+ or Cin2+) and “AGND”• Resolution 5 µA– Voltage supply for analog sensors via the VT-HNC100-C-3X U UBat X2A, Pin 7 (+24 Vsens)Analog outputs (AO):– Voltage outputs• Channel number2• Output voltage Unom –10 V to +10 V (max. –10.7 V to +10.7 V)• Output current Imax ±10 mA• Load Rmin1 kΩ– Resolution 1.25 mV – Non-linearity• In the range –9.5 V to +9.5 V< 0,1 %• In the range –10 V to –9.5 V and +9.5 V to +10 V< 0,2 % Technical data VT-HNC100-C-3X (Compact)1) If a 24 V transducer supply is implemented directly via theVT-HNC100...3X (supply voltage is looped in), the trans-ducer specification has to be observed.2) If the factory settings are insufficient, the measurement technology can be calibrated on site via software in asystem-specific way.Interface for WIN-PED 6, WIN-PED 7RS232Bus interface PROFIBUS DP (max. 12 MBaud according to IEC 61158), CANopenGate inputs (DI)Quantity 4Logic level log 0 (low) ≤ 5 V; log 1 (high) ≥ 10 V to U B ,I e = 20 mA at U B = 24 VPort Flexible conductor up to 1.5 mm 2Gate outputs (DO)Quantity 2Logic level log 0 (low) ≤ 2 V; log 1 (high) ≤ U B ; I max = 20 mA,Maximum load capacity C = 0.047 µF Port Flexible conductor up to 1.5 mm 2Reference potential for all signals DGNDDigital position transducers (encoders):– SSI transducer (Due to the higher control quality, an SSI transducer with clock synchronization should be used.) • Coding Gray-Code • Data width Adjustable up to max. 28 Bit • Line receiver / line driver RS485 • Voltage supply via the VT-HNC100-C-3X U U B – Reference potential for all signals EGND Dimensions See page 16AssemblyTop hat rail TH 35-7.5 or TH 35-15 according to EN 60715Admissible operating temperature range ϑ0 to 50 °C Storage temperature rangeϑ–20 to +70 °CProtection class according to EN 60529:1991IP 20Weight:m 440 gCE conformitySee page 2Further technical details upon request.Note!Information on the environment simulation testing for the areas EMC (electromagnetic compatibility), climate and mechani-cal load see data sheet 30139-U.Technical data VT-HNC100-C-3X (Compact) continuedOperating voltage 1)UB 18 to 30 VDC, residual ripple < 1.5 VppCurrent consumption at 24 VDC I 1 to 4 A (depending on the HNC variant and the additionallysupplied components)Processor32 bit power PCAnalog inputs (AI) per axis electronics:– Voltage inputs (differential inputs)• Channel number2• Input voltage UE max +12 V to –12 V (+10 V to –10 V measurable)• Input resistance RE 200 kΩ ± 5 %• Resolution 5 mV• Non-linearity< 0.2 %• Calibration tolerance 2)max. 40 mV (with factory settings)– Current inputs• Channel number2• Input current IE 4 mA to 20 mA• Input resistance RE 350 Ω at 20 °C (100 Ωmeasuring resistance)• Leakage current IV 0.1 to 0.4 %• Resolution 5 µA– Voltage supply for analog sensors via the VT-HNC100...3X U UBat X2A1 to X2A4, Pin 14 (+24 Vsens)Analog outputs (AO) per axis electronics: 3) 2 (1) – Non-linearity• In the range –9.5 V to +9.5 V< 0.1 %• In the range –10 V to –9.5 V and +9.5 V to +10 V< 0.2 %– Voltage output• Output voltage Unom –10 V to +10 V (max. –10.7 V to +10.7 V)• Output current Imax ±10 mA• Load Rmin 1 kΩ• Residual ripple±60 mV (without noise)• Resolution 1.25 mV– Current output• Output current Standardized Inom 4 mA to 20 mA• Load Rmax 500 Ω• Resolution0,625 μA Technical data VT-HNC100-...-3X (CPU + axis electronics)1) If a 24 V transducer supply is implemented directly via theVT-HNC100...3X (supply voltage is looped in), the trans-ducer specification has to be observed.2) If the factory settings are insufficient, the measurementtechnology can be calibrated on site via software in asystem-specific way.3) Configurable as current or voltage output.Axis electronics slot 1 and axis electronics slot 2 have twovoltage outputs Vout1 and Vout2. The axis electronics slot3 and slot4 only have one voltage output Vout1.Interface for WIN-PED 6interface for WIN-PED 7RS232RS232, optional TCP/IPBus interfacePROFIBUS DP (max. 12 MBaud according to IEC 61158), CANopen, PROFINET RTGate inputs (DI) or outputs (DO) per axis elec-tronics (settable via software)Quantity 11 1)Gate inputs (DI)Logic level log 0 (low) ≤ 5 V; log 1 (high) ≥ 10 V to U B ,I e = 20 mA at U B = 24 VPort Flexible conductor up to 1.5 mm 2Gate outputs (DO)Logic level log 0 (low) ≤ 2 V; log 1 (high) ≤ U B ; I max = 20 mA,Maximum load capacity C = 0.047 µF Port Flexible conductor up to 1.5 mm 2Reference potential for all signalsDGNDDigital position transducers (encoder) per axis electronics:– Incremental transducer (transducer with TTL output) • Input voltage log 00 to 1 V log 1 2.8 to 5.5 V• Input currentlog 0–0.8 mA (with 0 V)log 10.8 mA (with 5 V) • Max. frequency referring to Ua1f max 250 kHz• Voltage supply for incrementalTransducer via the VT-HNC100 (3X)U5.25 V ±1 %, max. 400 mA total current across all axes at X8M1 to X8M4, pin 12 (+5 Venc)– SSI transducer (Due to the higher control quality, an SSI transducer with clock synchronization should be used.) • Coding Gray-Code• Data widthAdjustable up to max. 28 Bit • Line receiver / line driverRS485• Voltage supply for SSI encoders via the VT-HNC100...3X U U B at X8M1 to X8M4, pin 14 (+24 Venc)Reference potential for all signals EGNDReference voltage per axis electronics U ref +10 V ± 25 mV (20 mA)Dimensions See page 16AssemblyTop hat rail TH 35-7.5 or TH 35-15 according to EN 60715Admissible operating temperature range ϑ0 to 50 °C Storage temperature rangeϑ–20 to +70 °CProtection class according to EN 60529:1991IP 20Weight:– VT-HNC100-1-3X – VT-HNC100-2-3X – VT-HNC100-3-3X – VT-HNC100-4-3Xm m m m585 g 690 g 850 g 960 gCE conformitySee page 2Further technical details upon request.Note:Information on the environment simulation testing for the areas EMC (electromagnetic compatibility), climate and me-chanical load see data sheet 30139-U.1) Maximally, 20 digital outputs can be connectedTechnical data VT-HNC100-...-3X (CPU + axis electronics), continuedPinout VT-HNC100-C-3X/... (Compact)Note:The pins marked with “reserved” are reserved and must not be wired!X8M Encoder Pin 8shield 724 Venc 6+5 V 5– Clk 4+ Clk 3– Data 2+ Data 1EGNDX2D DIO (digital)Pin 8shield 7OUT26OUT15IN44IN33IN22IN11DGNDX2A A IO (analog)Pin 8shield 724 Vsens 6Vout1 +5Vout2 +4Vin13Cin2 +2Cin1 +1AGNDX3C RS232Pin 12TxD 3RxD 4reserved 5GND 6reserved 7reserved 8reserved9X7P P ROFIBUS DP Pin 1reserved 2reserved 3RxD/TxD-P 4CNTR-P 5DGND 6VP 7reserved 8RxD/TxD-N 9reservedX7C CANopen Pin 1reserved 2CAN_L 3CAN_GND 4reserved 5reserved 6reserved 7CAN_H 8reserved 9reservedX1S Power Pin 1GND 2GND 318 – 30 VPinout VT-HNC100-1-3X/... (1-axis version)Note:The pins marked with “reserved” are reserved and must not be wired!X3C RS232Pin 12TxD 3RxD 4reserved 5GND 6reserved 7reserved 8reserved9X1S Power Pin 1GND 2GND 318 – 30 VX7P PROFIBUS DP Pin 1reserved 2reserved 3RxD/TxD-P 4CNTR-P 5DGND 6VP 7reserved 8RxD/TxD-N 9reservedX7C CANopen Pin 1reserved 2CAN_L 3CAN_GND 4reserved 5reserved 6reserved 7CAN_H 8reserved 9reservedSlot 1 X2D1DIO (digital)Pin1I/O 12I/O 23I/O 34I/O 45I/O 56I/O 67I/O 78I/O 89I/O 910I/O 1011I/O 1112DGNDSlot 1 X2A1 AIO (analog)Pin1Vin1 +2Vin1 –3Vin2 +4Vin2 –5Cin1 +6Cin1 – 7Cin2 +8Cin2 –9reserved 10AGND 11Vout1 +12Vout2 +13Cout114+24 Vsens 15reservedSlot 1 X8M1EncoderIncrementalSSIPin1– B (Inc)2+ CLK (SSI)3+ R (Inc)4– R (Inc)5+ A (Inc)6– A (Inc)7– CLK (SSI)8+ B (Inc)9– Data (SSI)10EGND11+ Data (SSI)12+5 Venc 13+10 Vref 14+24Venc 15reservedX7E1, X7E2PROFINET RT-connectionTCP/IPPinout VT-HNC100-2-3X/... (2-axis version)1) Maximally, 20 digital outputs can be connected.Note:The pins marked with “reserved” are reserved and must not be wired!X3C RS232Pin 12TxD 3RxD 4reserved 5GND 6reserved 7reserved 8reserved9X1S Power Pin 1GND 2GND 318 – 30 VX7P P ROFIBUS DP Pin 1reserved 2reserved 3RxD/TxD-P 4CNTR-P 5DGND 6VP 7reserved 8RxD/TxD-N 9reserved X7C CANopen Pin 1reserved 2CAN_L 3CAN_GND 4reserved 5reserved 6reserved 7CAN_H 8reserved 9reservedSlot 1 X2D1Slot 2 X2D2DIO 1)(digital)Pin 1I/O 12I/O 23I/O 34I/O 45I/O 56I/O 67I/O 78I/O 89I/O 910I/O 1011I/O 1112DGNDSlot 1 X2A1Slot 2 X2A2AIO (analog)Pin 1Vin1 +2Vin1 –3Vin2 +4Vin2 –5Cin1 +6Cin1 –7Cin2 +8Cin2 –9reserved 10AGND 11Vout1 +12Vout2 +13Cout114+24 Vsens 15reservedSlot 1 X8M1Slot 2 X8M2EncoderIncrementalSSIPin1– B (Inc)2+ CLK (SSI)3+ R (Inc)4– R (Inc)5+ A (Inc)6– A (Inc)7– CLK (SSI)8+ B (Inc)9– Data (SSI)10EGND11+ Data (SSI)12+5 Venc 13+10 Vref 14+24Venc 15reservedX7E1, X7E2PROFINET RT-connectionTCP/IPPinout VT-HNC100-3-3X/... (3-axis version)1) Maximally, 20 digital outputs can be connected.2) Not available with slot 3 (reserved)Note:The pins marked with “reserved” are reserved and must not be wired!X3C RS232 Pin12TxD 3RxD 4reserved 5GND 6reserved 7reserved 8reserved 9X1S Power Pin1GND2GND 318 – 30 V X7P P ROFIBUS DP Pin1reserved 2reserved 3RxD/TxD-P 4CNTR-P 5DGND6VP7reserved 8RxD/TxD-N 9reserved X7C CANopen Pin1reserved 2CAN_L3CAN_GND 4reserved 5reserved 6reserved 7CAN_H 8reserved 9reservedSlot 1 X2D1Slot 2 X2D2Slot 3 X2D3DIO 1)(digital)Pin1I/O 12I/O 23I/O 34I/O 45I/O 56I/O 67I/O 78I/O 89I/O 910I/O 1011I/O 1112DGNDSlot 1 X2A1Slot 2 X2A2Slot 3 X2A3AIO(analog)Pin1Vin1 +2Vin1 –3Vin2 +4Vin2 –5Cin1 +6Cin1 –7Cin2 +8Cin2 –9reserved10AGND11Vout1 +12Vout2 + 2)13Cout114+24 Vsens15reserved Slot 1 X8M1Slot 2 X8M2Slot 3 X8M3EncoderIncremental SSIPin1– B (Inc)2+ CLK (SSI)3+ R (Inc)4– R (Inc)5+ A (Inc)6– A (Inc)7– CLK (SSI)8+ B (Inc)9– Data (SSI)10EGND11+ Data (SSI)12+5 Venc13+10 Vref14+24Venc15ReservedX7E1, X7E2 PROFINET RT-connectionTCP/IPIn preparationPinout VT-HNC100-4-3X/... (4-axis version)X3C RS232 Pin12TxD3RxD4reserved 5GND6reserved 7reserved 8reserved 9X1S Power Pin1GND2GND 318 – 30 V X7P P ROFIBUS DP Pin1reserved 2reserved 3RxD/TxD-P 4CNTR-P 5DGND6VP7reserved 8RxD/TxD-N 9reserved X7C CANopen Pin1reserved 2CAN_L3CAN_GND 4reserved 5reserved 6reserved 7CAN_H 8reserved 9reservedSlot 1 X2D1Slot 2 X2D2Slot 3 X2D3Slot 4 X2D4DIO1)(digital)Pin1I/O 12I/O 23I/O 34I/O 45I/O 56I/O 67I/O 78I/O 89I/O 910I/O 1011I/O 1112DGNDSlot 1 X2A1Slot 2 X2A2Slot 3 X2A3Slot 4 X2A4AIO(analog)Pin1Vin1 +2Vin1 –3Vin2 +4Vin2 –5Cin1 +6Cin1 –7Cin2 +8Cin2 –9reserved10AGND11Vout1 +12Vout2 + 2)13Cout114+24 Vsens15reserved Slot 1 X8M1Slot 2 X8M2Slot 3 X8M3Slot 4 X8M4EncoderIncremental SSIPin1– B (Inc)2+ CLK (SSI)3+ R (Inc)4– R (Inc)5+ A (Inc)6– A (Inc)7– CLK (SSI)8+ B (Inc)9– Data (SSI)10EGND11+ Data (SSI)12+5 Venc13+10 Vref14+24Venc15reserved1) Maximally, 20 digital outputs can be connected.2) Not available with slot 3 and slot 4 (reserved)Note:The pins marked with “reserved” are reserved and must not be wired!X7E1, X7E2 PROFINET RT-connectionTCP/IPUnit dimensions VT-HNC100-C-3X/… (dimensions in mm)Unit dimensions of all axis versions (dimensions in mm)Installation on top hat rail TH 35-7.5 or TH 35-15 according to EN 60715Dimensions in () apply for PROFINET RT version or TCP/IP versionInstallation on top hat rail TH 35-7.5 orProject Planning / Maintenance Instructions / Additional InformationProduct documentation for VT-HNC100 (3X)Product information 09956Data sheet 30139Operating instructions 30139-BDeclaration on environmental compatibility 30139-UWIN-PED 6 / WIN-PED 7First stepsOnline helpMachine dataNC commandsParameterCANopen (only with WIN-PED 6)PROFIBUS DP (PROFIBUS DP with TCP/IP only with WIN-PED 7)PROFINET RT (only with WIN-PED 7)General Information on the maintenance and commissioning of hydraulic components 07800 / 07900Commissioning software and documentation on the Internet: /HNC100Maintenance instructions:– The devices have been tested in the plant and are supplied with default settings.– Only complete units can be repaired. The repaired units will be supplied with default settings. User-specific settings are not maintained. The operator will have to re-transfer the corresponding user parameters and programs.Notes:– Electric signals taken out via control electronics (e.g. signal “No error”) may not be used for the actuation of safety-relevant machine functions! (See also the European standard “Safety requirements for fluid power systems and their components - Hydraulics”, EN 982.)– If electromagnetic interference must be expected, take appropriate measures to safeguard the function (depending on the application, e.g. screening, filtration)!– Wiring information∙ Largest spatial separation of signal and load lines possible∙ Don't lead signal lines through magnetic fields∙ If possibly, lay signal lines without intermediate terminals.∙ Don't lay signal lines parallely to load lines– For more information refer to the WIN-PED 6 and WIN-PED 7 online help and the 30139-B operating instructions– The upper and lower ventilation slots must not be concealed by adjacent units in order to provide for sufficient cooling.NotesBosch Rexroth AG HydraulicsZum Eisengießer 197816 Lohr am Main, Germany Phone +49 (0) 93 52 / 18-0 Fax +49 (0) 93 52 / 18-23 58 documentation@boschrexroth.de www.boschrexroth.de © This document, as well as the data, specifications and other informa-tion set forth in it, are the exclusive property of Bosch Rexroth AG. It may not be reproduced or given to third parties without its consent.The data specified above only serve to describe the product. No state-ments concerning a certain condition or suitability for a certain applica-tion can be derived from our information. The information given does not release the user from the obligation of own judgment and verification. It must be remembered that our products are subject to a natural process of wear and aging.Notes。
Rexroth 电液注射成型机器的数字控制器 说明书
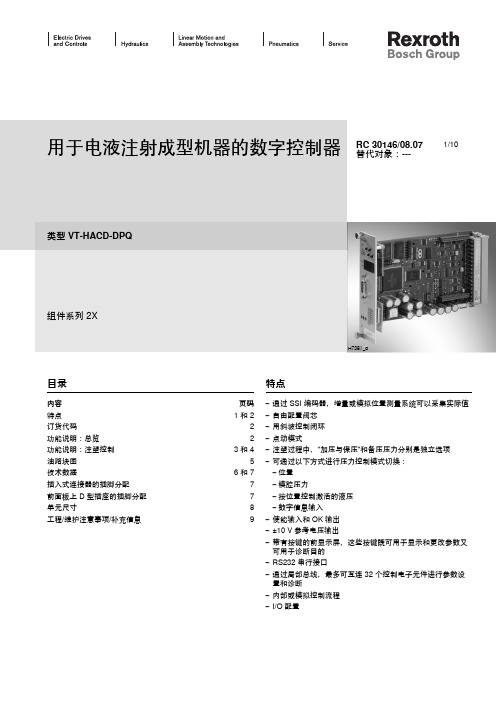
1/10用于电液注射成型机器的数字控制器类型 VT-HACD-DPQ组件系列 2XRC 30146/08.07替代对象:---目录内容 页码特点 1 和 2订货代码 2功能说明:总览 2功能说明:注塑控制 3 和 4油路块图 5技术数据6 和 7插入式连接器的插脚分配 7前面板上 D 型插座的插脚分配 7单元尺寸8工程/维护注意事项/补充信息9– 通过 SSI 编码器,增量或模拟位置测量系统可以采集实际值– 自由配置阀芯– 用斜坡控制闭环– 点动模式– 注塑过程中,"加压与保压"和备压压力分别是独立选项– 可通过以下方式进行压力控制模式切换: – 位置 – 模腔压力– 按位置控制激活的液压 – 数字信息输入– 使能输入和 OK 输出– ±10 V 参考电压输出– 带有按键的前显示屏,这些按键既可用于显示和更改参数又可用于诊断目的– RS232 串行接口– 通过局部总线,最多可互连 32 个控制电子元件进行参数设置和诊断– 内部或模拟控制流程– I/O 配置特点H7387_d订货代码数字控制器板卡组件系列 20 至 29 = 2X (20 至 29:安装和连接尺寸不变)基本单元 = V00 =不带阀输出级0 =不带总线连接C =CANopenD =DeviceNet1 =带显示屏VT-HACD-DPQ12X V010功能说明:总览总览VT-HACD-DPQ 是数字控制器板卡。
可优化液压注塑轴的控制。
– 使用闭环位置控制可完全控制注塑速率分布。
可基于操控输入速率分布自动计算高级位置命令分布。
– 由于 VT-HACD-DPQ 是一种位置控制设备,所以需要位置反馈传感器。
VT-HACD-DPQ 可支持模拟(0...10 V;±10 V;0...20 mA;4...20 mA)和数字类型(SSI,INCR)。
– VT-HACD-DPQ 包括注塑力限制控制,经配置后可与 1 个或 2 个压力传感器或者测压元件一起使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
系统要求
计算机硬件 –- 与IBM兼容的个人计算机,至少配备奔腾I处理器 –- VGA视频适配器 –- 微软公司的鼠标或兼容的指示器 –- 至少64MB的内存(RAM) –- 一个空闲的串行接口,4 –- 可用的硬盘空间:>20 MB
2
该软件提供了所有符合IEC 61131-3标准规定的编程用图
2
形和文字。
2
另外,BODAS设计软件为软件开发提供了方便的支持:
3
- 进行程序跟踪时,可随时间显示内部变量,可中断程序
3
过程,如在进行故障检修时。
- 应用程序可方便的下载至控制器中。
- 通过单个可视化参数设置,可以将过程数据和诊断消息
显示出来。
操作系统 Windows 95/98;Windows NT4.0;Windows 2000;Windows XP
推荐的附加部件 –-Testbox TB2(包括带Hirschmann 插头的电缆,见 RC95091); 材料号:R902076382 上述部件可由力士乐提供。请参考上述的材料号。
许可证保护 BODAS设计软件通过软件代码的方式在计算机上进行授权。
BODAS设计软件
技术数据表
RC 95 110/07.05
1/4
代替:04.02
型号21 BODAS控制器RC的开发环境
目录 订货型号 主要部件 所需的附加部件 许可证保护 系统要求 终端连接 安全说明
特性
2
“BODAS 设计软件”是用于为力士乐产品系列中的BO-
2
DAS系统中的RC系列控制器进行编程的计算机软件。
- 当连接或断开BODEM连接电缆时,必须关闭控制器和计算机。 - 不可使用BB-3连接电缆。如果使用了错误的连接电缆或进行了错误的布线,可能会损坏计算机接口。 - 对于所供应的电子部件和软件,力士乐不承担属于制造商责任范围以外的整个系统的任何技术责任。 - 必须遵守RDE 90301-01中的安全说明。 - 必须考虑相关硬件的数据表所提供的信息(见RC 95200)。 - 根据版权法,禁止复制、翻译和发行力士乐软件。 - 力士乐的“一般交货条件”以及BODAS设计软件的附加“交货条件”适用。
- 在开发应用软件期间,可直接编辑BODEM维护工具的
诊断信息。
Hale Waihona Puke - 在标准应用程序的基础上,通过使用模板(包含可执行的
源代码),可快速地创建自定义的应用程序。
/4
博世力士乐 | 行走机械液压
BODAS设计软件 | RC 95 110/07.05
订货型号
BODAS-设计软件/21_______________材料号: R902098450 主要部件 –-CD-ROM包含如下内容: -安装软件 -德文和英文操作说明书
/4
博世力士乐 | 行走机械液压
备注
BODAS设计软件 | RC 95 110/07.05
博世力士乐中国
中国上海市浦东大道1号船舶大厦4楼 邮编:200120 电话:(86-21)3866 6000 传真:(86-21)3866 6111
© 本文件及其中的数据、技术规范及其它信息归博世力士乐 有限公司独家所有。未经该公司的同意不得复制或向第三方 提供这些信息。 上述数据仅用于描述产品。我公司信息不得作为特定场合或 特定用途适合性陈述的论据。所提供的信息不能够免除用户 自行进行判断和验证的责任。必须谨记我公司产品存在磨损 和老化的自然过程。 保留更改权。
1) 诊断插座的订货型号 Metalock-Bantam UTG012-8S 8插脚(制造商:FCI)。 包括:
插座
8个内插头触点 电缆夹
防尘盖 2)SUB-D外插头,9插脚 3)不包括在供货范围内。
FCI订货代码 UTG012-8S RC16M23K UTG12PG UTP12DCG
安全说明
- 只有在调试或维修时才使用带BODAS设计软件的计算机进行操作。这时计算机需与机器内部或车辆内部的控制器相连接。 必须采取适当的安全措施,以防止由于不可预见的工作条件导致的危险。 当机器在正常工作状态下时,不可使用BODAS。
RC 95 110/07.05 | BODAS设计软件
行走机械液压 | 博世力士乐 /4
终端连接
BODAS 控制器RC
RS 232 接口
TxD RxD
诊断 插座 1)3)
BODEM 连接电缆 3)
C D B E A 不可使用
+UB
COM1,COM2, COM3或 COM42)
1 2 3 4 5 6 7 8 9