【CN109968384A】一种自动分选机器人及控制方法【专利】
【CN109911338A】一种自动分拣装置和智能分装系统及其操作方法【专利】
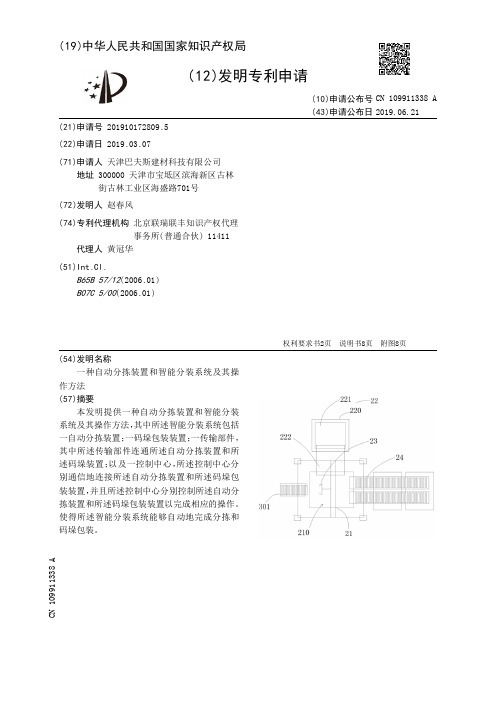
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201910172809.5(22)申请日 2019.03.07(71)申请人 天津巴夫斯建材科技有限公司地址 300000 天津市宝坻区滨海新区古林街古林工业区海盛路701号(72)发明人 赵春风 (74)专利代理机构 北京联瑞联丰知识产权代理事务所(普通合伙) 11411代理人 黄冠华(51)Int.Cl.B65B 57/12(2006.01)B07C 5/00(2006.01)(54)发明名称一种自动分拣装置和智能分装系统及其操作方法(57)摘要本发明提供一种自动分拣装置和智能分装系统及其操作方法,其中所述智能分装系统包括一自动分拣装置;一码垛包装装置;一传输部件,其中所述传输部件连通所述自动分拣装置和所述码垛装置;以及一控制中心,所述控制中心分别通信地连接所述自动分拣装置和所述码垛包装装置,并且所述控制中心分别控制所述自动分拣装置和所述码垛包装装置以完成相应的操作。
使得所述智能分装系统能够自动地完成分拣和码垛包装。
权利要求书2页 说明书8页 附图8页CN 109911338 A 2019.06.21C N 109911338A权 利 要 求 书1/2页CN 109911338 A1.一种自动分拣装置,其特征在于,包括:一分拣平台,所述分拣平台具有一放置区域和多个分拣区域;一区分部件,所述区分部件设置在所述放置区域和所述分拣区域之间,所述区分部件包括一探测单元和一分拣单元,其中所述探测单元和所述分拣单元通信地连接,当所述探测单元探测到所述包装物的不同规格,所述分拣单元将所述包装物分拣至不同的所述分拣区域;一运输部件,其中所述运输部件包括多个传输单元和一升降单元,所述升降单元连通每一所述传输单元;以及一塑封包装部件,其中所述升降单元连通所述塑封包装部件,所述传输单元连通所述放置区域和所述分拣区域,所述区分部件设置在所述运输部件上,当不同规格的包装物被分拣时通过所述传输单元传输至不同的所述分拣区域。
一种自动分拣装置[实用新型专利]
![一种自动分拣装置[实用新型专利]](https://img.taocdn.com/s3/m/bc51d815f705cc175427096f.png)
专利名称:一种自动分拣装置专利类型:实用新型专利
发明人:蔡继瑞
申请号:CN201721023258.9申请日:20170816
公开号:CN207188231U
公开日:
20180406
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种自动分拣装置,属于货物分拣技术领域,该分拣装置包括输送装置和控制器,输送装置的入口处设置有扫描装置,输送装置的一侧或者两侧设置有多个分拣口;所述输送装置在包裹到达分拣口位置时产生停顿,输送装置上设置有拨件机构,拨件机构的设置位置与所述分拣口相对应;所述扫描装置及拨件机构均与所述控制器相连接。
其控制器包括信号转换模块、数据接收模块和主控模块。
本实用新型示例的技术方案可使分拣装置上的包裹与分拣口精准对应,操作便捷,工作可靠,实用性强。
申请人:顺丰速运有限公司
地址:518128 广东省深圳市宝安区国际机场航站四路1111号
国籍:CN
代理机构:北京志霖恒远知识产权代理事务所(普通合伙)
代理人:崔静
更多信息请下载全文后查看。
一种用于智能物流的自动分拣系统专利
一种用于智能物流的自动分拣系统专利智能物流的快速发展对现代物流行业带来了许多便利,同时也对物流公司提出了更高的要求。
为了解决传统分拣系统效率低下、人工成本高等问题,一种用于智能物流的自动分拣系统专利得到了开发和应用。
本文将介绍这一专利的工作原理和应用前景。
这种自动分拣系统专利采用了先进的技术,主要包括计算机视觉和机器学习等。
当包裹进入分拣系统后,通过高分辨率的摄像头将包裹进行扫描,获取物品的外观信息和二维码等标识。
同时,系统还利用深度学习算法对这些信息进行分析和处理,使其具备了智能辨识各种物品的能力。
通过大量样本的学习,系统能够准确地识别包裹内的物品,并将其分类。
这一自动分拣系统的工作速度快、准确度高。
相比传统的人工分拣方式,它无需依赖人工视觉来判断物品种类,减少了人为因素带来的误差,同时也规避了人工分拣效率低下的问题。
系统内的计算机可以实时处理大量信息,通过算法的优化,将分拣的速度提升到了一个新的水平。
这种高效快速的分拣系统可以大大提高物流公司的处理能力,缩短货物的处理时间,提高客户满意度。
该专利的应用前景广阔。
智能物流市场日益庞大,各大物流公司对提高效率和降低成本有着迫切需求。
这种自动分拣系统专利可以被广泛建造应用于物流仓库、快递站点等场所,帮助物流公司实现自动化操作,提高仓库的利用率和运输效率。
此外,由于其多样化、灵活性强的特点,该系统也可以根据不同行业的需求进行定制,满足电商、食品、医药等不同行业对物流效率的要求。
然而,值得一提的是,这种自动分拣系统专利的应用仍然受到一些技术和环境限制。
技术上,需要不断完善和更新计算机视觉和机器学习算法,以提高系统的准确度和鲁棒性。
环境上,物流行业的发展不同国家和地区存在差异,有些地方的仓库设施相对简陋,无法适应高端智能设备的应用。
因此,推广和应用该专利需要考虑到现实因素,结合具体情况进行合理规划和实施。
综上所述,一种用于智能物流的自动分拣系统专利是一项具有重要意义的发明。
一种自动分选设备[实用新型专利]
![一种自动分选设备[实用新型专利]](https://img.taocdn.com/s3/m/a3b1281cf61fb7360a4c655a.png)
专利名称:一种自动分选设备专利类型:实用新型专利
发明人:余彪
申请号:CN201820589400.4申请日:20180424
公开号:CN208407305U
公开日:
20190122
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种自动分选设备,包括机架和设置在机架上的筛选机构,所述筛选机构用于将产品、磨料和碎磨料进行分离,还包括水洗机构;所述水洗机构用于将水引入筛选机构中,提高产品和磨料的分离效率。
该自动分选设备,通过振动电机带动分选漏斗振动同时进行水洗,可以把产品和磨料有效分离,全自动省人省力,提高分离效率,且分选良率高;所述水洗机构中设置有过滤器,保证重复使用进入分选漏斗的水洁净度,水循环使用,环保卫生且节约水资源。
申请人:昆山金海格电子有限公司
地址:215300 江苏省苏州市石牌镇长江北路与京阪路口中邦研发中心7#
国籍:CN
代理机构:苏州创元专利商标事务所有限公司
代理人:范晴
更多信息请下载全文后查看。
一种自动分选机构[实用新型专利]
![一种自动分选机构[实用新型专利]](https://img.taocdn.com/s3/m/678896ff5f0e7cd185253687.png)
专利名称:一种自动分选机构专利类型:实用新型专利
发明人:洪灵坪
申请号:CN201821237267.2申请日:20180801
公开号:CN208679840U
公开日:
20190402
专利内容由知识产权出版社提供
摘要:本实用新型公开一种自动分选机构,包括机架、上料装置、传输检测装置、分选装置、以及控制箱,传输检测装置包括传输皮带固定座、传输皮带、驱动装置、机架连接板、相机安装箱、CCD相机、以及摄像头感应器;分选装置包括分选框定位座、分选框,分选框定位座固定有磁轭,磁轭内部设置有电磁线圈,电磁线圈连接有继电器,摄像头感应器、CCD相机、继电器与控制箱电连接;分选框的外部固定有磁铁,磁铁以及磁轭之间连接有第一弹簧,分选框的内部设置有合格品收集箱以及不合格品收集箱,合格品收集箱靠近磁铁一侧,分选框向磁轭移动的距离大于等于合格品收集箱的长度。
本实用新型公开一种自动分选机构,其分选精度高,且CCD相机调节操作方便。
申请人:洪灵坪
地址:350700 福建省福州市永泰县清凉镇清凉村清凉13号
国籍:CN
更多信息请下载全文后查看。
一种自动分选机械手[实用新型专利]
![一种自动分选机械手[实用新型专利]](https://img.taocdn.com/s3/m/dd657f2c8bd63186bdebbc8f.png)
专利名称:一种自动分选机械手
专利类型:实用新型专利
发明人:郭建文,罗鸿彬,孙振忠,叶国良,陆光铭,罗男生,黄市生,黄杰良
申请号:CN201820600223.5
申请日:20180425
公开号:CN208451638U
公开日:
20190201
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种自动分选机械手,包括机械夹持器,所述机械夹持器包括设有第一夹持部和第二夹持部的机械手掌,所述机械夹持器设有用于测试所述第一夹持部和第二夹持部的距离的测距模块;所述自动分选机械手还包括控制模块,所述控制模块与测距模块电连接,所述控制模块根据测距模块返回的信号控制所述自动分选机械手进行自动分选。
本实用新型的自动分选机械手结构简单、成本低廉,能够有效识别不同直径大小的圆柱形零件并将其自动分选,无需使用结构复杂、成本高的机器视觉。
申请人:东莞理工学院,东莞市横沥模具科技产业发展有限公司
地址:523808 广东省东莞市松山湖科技产业园区大学路1号
国籍:CN
代理机构:广州粤高专利商标代理有限公司
代理人:陈卫
更多信息请下载全文后查看。
一种分选测试机[实用新型专利]
![一种分选测试机[实用新型专利]](https://img.taocdn.com/s3/m/257c4947dd3383c4ba4cd20d.png)
专利名称:一种分选测试机专利类型:实用新型专利
发明人:何明清,钟啸风
申请号:CN201320337920.3申请日:20130613
公开号:CN203372817U
公开日:
20140101
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种分选测试机,包括机架以及安装在机架上的直线送料机构和旋转送料机构,直线送料机构包括振动盘和与振动盘相互连接的直振送料导轨,旋转送料机构包括驱动件和与驱动件连接的转动盘,转动盘的圆周边缘上设有若干个放料槽,槽口与直振送料导轨的送料口相互配合衔接,转动盘上分别设有测试装置、元件有无检测装置和排料装置。
本实用新型不仅结构更简单、故障率低、性能更稳定,降低了制造成本,而且速度更快,提高了生产效率。
申请人:何明清,钟啸风
地址:518000 广东省深圳市宝安区石岩上排工业区D栋2层
国籍:CN
代理机构:深圳市精英专利事务所
代理人:李新林
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910294958.9
(22)申请日 2019.04.12
(71)申请人 深圳清华大学研究院
地址 518000 广东省深圳市南山区高新技
术产业园区高新南七道清华大学研究
院A302室
(72)发明人 朱惠忠 曹鸣皋 肖文鹏
(74)专利代理机构 深圳新创友知识产权代理有
限公司 44223
代理人 黄议本
(51)Int.Cl.
B25J 15/00(2006.01)
B25J 13/08(2006.01)
B25J 18/00(2006.01)
(54)发明名称一种自动分选机器人及控制方法(57)摘要本发明公开了一种自动分选机器人及控制方法。
所述机器人包括框架以及设置在所述框架上的接料台、机械手总成、暂存仓阵列、接料转运总成和集料输出总成;所述暂存仓阵列包括多个子暂存仓;所述子暂存仓的下部设有放料门;所述机械手总成用于根据第一控制信号将所述接料台上的零部件抓取并配组分发到所述暂存仓阵列的指定子暂存仓中;所述接料转运总成可根据第二控制信号运动至指定的所述子暂存仓的底部下方打开所述放料门,将所述子暂存仓配组满额的所述零部件放下并转运至所述集料输出总成;所述集料输出总成用于将配组满额的所述零部件输送至下一个工位。
所述控制方法采用所述机器人。
如此,可实现零部件的自动分选配组,
提高生产效率。
权利要求书2页 说明书8页 附图4页CN 109968384 A 2019.07.05
C N 109968384
A
权 利 要 求 书1/2页CN 109968384 A
1.一种自动分选机器人,其特征在于:包括框架、接料台、机械手总成、暂存仓阵列、接料转运总成和集料输出总成;所述暂存仓阵列包括多个子暂存仓;所述子暂存仓的底部设有放料门;
所述机械手总成用于根据第一控制信号抓取所述接料台上的零部件并配组分发到所述暂存仓阵列的指定子暂存仓中;
所述接料转运总成可根据第二控制信号运动至指定的所述子暂存仓的下方打开所述放料门,将所述子暂存仓中的所述零部件放下并转运至所述集料输出总成;
所述集料输出总成用于将所述接料转运总成转运过来的所述零部件输出至下一个工位处理。
2.根据权利要求1所述的自动分选机器人,其特征在于:
所述暂存仓阵列为沿圆周方向均匀分布的子暂存仓圆周阵列;每个所述子暂存仓为管状,所述子暂存仓的上方开口,所述子暂存仓的底部设置有可以开启放料且常闭的放料门;
所述机械手总成可绕所述子暂存仓圆周阵列的中心轴线转动,以从所述接料台抓取所述零部件并配组分发放入指定的所述子暂存仓中;
所述接料转运总成可绕所述子暂存仓圆周阵列的中心轴线转动,以使所述接料转运总成的接料端转动至指定的所述子暂存仓的下方打开所述放料门以接取所述零部件。
3.根据权利要求2所述的自动分选机器人,其特征在于:所述暂存仓阵列包括多个同心的所述子暂存仓圆周阵列,多个同心的所述子暂存仓圆周阵列由内而外设置;所述机械手总成包括至少两节机械臂,所述至少两节机械臂相互转动连接,其中一节所述机械臂的末端设置有可以抓取或放下所述零部件的机械爪,另一节所述机械臂的一端可绕所述子暂存仓圆周阵列的中心轴线转动。
4.根据权利要求3所述的自动分选机器人,其特征在于:所述至少两节机械臂包括一节大臂和一节小臂,所述大臂的一端固定绕所述暂存仓圆周阵列的中心轴线转动,所述大臂的另一端设置有可控制转角大小和旋转快慢的旋转轴,所述小臂的一端固定在所述旋转轴上,所述小臂在所述旋转轴的驱动下可相对所述大臂的移动端转动;在所述小臂的另一端设置有所述机械爪;协调所述大臂相对所述框架、所述小臂相对所述大臂的转动和所述机械爪的抓取及释放动作,可以实现将接料台上的零部件输送至任意指定所述暂存子仓的动作。
5.根据权利要求2所述的自动分选机器人,其特征在于:所述机械手总成的一端用于抓取所述零部件,所述机械手总成的另一端的转动轴线与所述子暂存仓圆周阵列的中心轴线重合;所述接料转运总成的接料端设置有用于打开所述放料门的推杆,所述推杆可在系统指令的控制下向上推出打开所述放料门;所述接料转运总成可绕所述子暂存仓圆周阵列的中心轴线转动。
6.根据权利要求1所述的自动分选机器人,其特征在于:所述放料门包括挡板和杠杆,对所述杠杆的作用端施加推力可推动所述挡板绕支点轴转动打开。
7.根据权利要求6所述的自动分选机器人,其特征在于:所述接料转运总成的接料端设置有可伸缩的推杆,所述推杆通过伸出驱动所述杠杆转动以打开所述放料门;所述杠杆通过装在支撑轴上的复位扭转弹簧的恢复力保持所述挡板处于关闭状态。
8.根据权利要求1至7任一项所述的自动分选机器人,其特征在于:还包括落料斗,所述
2。