运动控制系统仿真实验讲义
运动控制实验讲义(自动化)
运动控制系统实验实验一晶闸管直流调速系统参数和环节特性的测定一.实验目的1.熟悉晶闸管直流调速系统的组成结构;2.掌握晶闸管直流调速系统参数与环节特性的测定方法。
二.实验内容1.测定晶闸管整流装置的外特性;2.测定晶闸管触发及整流装置的放大系数;3.用直流伏安法测量直流电动机的电枢电阻和电抗器电阻;4.直流电动机电势常数Ce和转矩常数C M的测定;5.测定晶闸管直流调速系统机电时间常数T M(选做);6.测定直流电动机-发电机-测速发电机组的飞轮惯量GD2;7.绘制自由停车曲线n=f ( t )(选做);8.测速发电机特性U TG=f (n)的测试;9.用交流伏安法测量直流电动机电枢回路的电感;10.计算主电路电磁时间常数测定。
三.实验系统组成和工作原理晶闸管直流调速系统由三相交流电路、晶闸管整流调速装置、平波电抗器,电动机——发电机组等组成。
本实验中,整流装置的主电路为三相桥式电路,控制回路可直接由给定电压Ug作为触发器的移相控制电压,改变U g的大小即可改变控制角,从而获得可调的直流电压和转速,以满足实验要求。
四.实验设备及仪器见表3-1五.注意事项为防止电枢过大电流的冲击,每次增加U g 须缓慢,且每次起动电动机前给定电位器应调回零位,以防过流。
表3-1实验设备及仪器六.实验方法1.测定整流装置的外特性u =f( I ),并确定其内阻r 。
⑴ 实验原理 见图3-1图3-1 整流装置外特性测试原理图⑵ 数据测定及处理每次实验前,都应将负载电阻R 的阻值置于最大。
由于考虑到整流装置内阻的非线性关系,因此在实验中应测定不同的α角时的外特性曲线u =f( I ),α值可取三种不同的角度,对于每个不同的α值,通过改变R 的大小,可测取其4个左右的相应参数,并描述u =f( I )曲线(应为直线簇),该直线的斜率即为r 。
r=△u /△I(合理选择△u 、△I的值)在实验中,应注意负载电流不得超过其额定值0.6A;每次重新改变α时,R应置于最大位置。
《运动控制系统》教案
《运动控制系统》教案一、教学目标1. 理解运动控制系统的概念和组成2. 掌握运动控制系统的分类和原理3. 了解运动控制系统在实际应用中的重要性二、教学内容1. 运动控制系统的概念和组成1.1 运动控制系统的定义1.2 运动控制系统的组成要素2. 运动控制系统的分类和原理2.1 模拟运动控制系统2.2 数字运动控制系统2.3 位置控制、速度控制和加速度控制3. 运动控制系统在实际应用中的重要性3.1 运动控制系统在工业生产中的应用3.2 运动控制系统在技术中的应用3.3 运动控制系统在自动驾驶技术中的应用三、教学方法1. 讲授法:讲解运动控制系统的概念、分类和原理,引导学生理解并掌握相关知识。
2. 案例分析法:分析运动控制系统在实际应用中的重要性,帮助学生了解运动控制系统的应用价值。
3. 讨论法:组织学生探讨运动控制系统的发展趋势和挑战,培养学生的创新思维和问题解决能力。
四、教学资源1. 教材:《运动控制系统》2. 多媒体课件:PPT、动画、视频等3. 网络资源:相关论文、案例、新闻报道等五、教学评价1. 课堂参与度:评估学生在课堂讨论、提问等方面的积极性。
2. 课后作业:布置相关练习题,评估学生对运动控制系统知识的理解和掌握程度。
3. 小组项目:组织学生团队合作完成一个运动控制系统的应用案例,评估学生的实践能力和问题解决能力。
六、教学安排1. 课时:共计32课时,每课时45分钟2. 教学计划:第1-4课时:运动控制系统的概念和组成第5-8课时:运动控制系统的分类和原理第9-12课时:运动控制系统在实际应用中的重要性第13-16课时:运动控制系统的的发展趋势和挑战七、教学步骤1. 引入:通过一个实际应用案例,引出运动控制系统的重要性,激发学生的学习兴趣。
2. 讲解:讲解运动控制系统的概念、分类和原理,引导学生理解并掌握相关知识。
3. 案例分析:分析运动控制系统在实际应用中的重要性,帮助学生了解运动控制系统的应用价值。
《控制系统仿真概述》课件
控制系统仿真技术在工业自动化中的 应用案例
案例1: 案例2: 案例3:
使用仿真技术优化工业生产过程,提高产 品质量和生产效率。
仿真可用于工业机器人的路径规划和运动 控制,提高机器人制造的精度和效率。
通过仿真模拟电力系统的运行,评估电网 的可靠性和稳定性。
1
需求分析
明确仿真目的和需求,确定仿真模
模型建立
2
型的范围和细节。
选择合适的模型类型,通过数学表
达式或图形化界面建立仿真模型。
3
参数设置
设置仿真模型的参数,如控制器参
仿真运行
4
数、传感器参数和环境参数。
运行仿真模型并记录仿真结果,包 括系统的动态响应和性能评估。
仿真模型的建立和验证
建立
选择适当的建模方法,如物理建模、经验建 模或数学建模,以及相应的建模工具。
验证
使用实测数据或理论分析验证仿真模型的准 确性和可靠性。
仿真参数的设置和调整
灵敏度分析
通过改变某些参数来评 估系统对参数变化的敏 感性。
优化
使用优化算法寻找最佳 参数组合,使系统达到 预期性能。
鲁棒性分析
评估系统对参数不确定 性和外部干扰的抗干扰 能力。
仿真结果的评价和分析
数据分析
对仿真结果进行统计分析、 频谱分析等,从中获取系统 的性能指标。
趋势分析
通过绘制曲线图等方式,找 出系统响应的趋势和规律。
性能评估
根据仿真结果,评估系统在 不同工况下的性能和稳定性。
仿真技术的应用领域
1 工业自动化
2 航天航空
仿真可用于工业控制系统的设计、优化 和计 和验证,以及飞行器性能评估。
3 电力系统
4 交通运输
《运动控制系统》实验指导书[新][152023]
![《运动控制系统》实验指导书[新][152023]](https://img.taocdn.com/s3/m/f651f848ddccda38376baf9e.png)
一、运动控制系统实验项目一览表实验室名称:电机拖动实验室课程名称:运动控制系统适用专业:电气工程及自动化、自动化实验总学时:16设课方式:课程实验(“课程实验”或“独立设课”二选一)是否为网络实验:否(“是”或“否”二选一)实验一晶闸管直流调速系统主要单元调试一.实验目的1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。
2.掌握直流调速系统主要单元部件的调试步骤和方法。
二.实验内容2.电平检测器的调试3.反号器的调试4.逻辑控制器的调试三.实验设备及仪器1.教学实验台主控制屏。
2.NMCL—31A组件3.NMCL—18组件4.双踪示波器5.万用表四.实验方法1.速度调节器(ASR)的调试按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。
注意:正常使用时应“封锁”,以防停机时突然启动。
(1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI调节器,加入一定的输入电压(由NMCL—31的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于 5V。
(2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
(3)观察PI特性拆除“5”、“6”端短接线接入5~7uf电容,(必须按下选择开关,绝不能开路),突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。
反馈电容由外接电容箱改变数值。
2.电流调节器(ACR)的调试按图1-5接线。
(1)调整输出正,负限幅值“9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值大于 6V。
(2)测定输入输出特性将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。
运动控制系统仿真---实验讲义
《运动控制系统仿真》实验讲义谢仕宏xiesh@实验一、闭环控制系统及直流双闭环调速系统仿真一、实验学时:6学时二、实验内容:1.已知控制系统框图如图所示:图1-1单闭环系统框图图中,被控对象G(S) 10e-150s,GC(S)为PID控制器,试整定PID控制器300s + 1参数,并建立控制系统Simulink仿真模型。
再对PID控制子系统进行封装,要求可通过封装后子系统的参数设置页面对KP、Ti、Td进行设置。
2.已知直流电机双闭环调速系统框图如图1-2所示。
试设计电流调节器ACR和转速调节器ASR并进行SimUIink建模仿真。
图1-2直流双闭环调速系统框图三、实验过程:1、建模过程如下:(1)PID控制器参数整顿根据PID参数的工程整定方法(Z-N法),如下表所示,KP= 伯=0.24,Ti= 2 =300, KτTd= 0. 5 =75。
表1-1 Z-N法整定PID参数PI 0.9T-K T3τ无0.4K c0.8TC无PID 1.2TK I2τ0∙5τ0.6KC0.5TC0.12TC(2) Simulink仿真模型建立建立SimUIink仿真模型如下图1-3所示,并进行参数设置:图1-3中,SteP模块"阶跃时间”改为 O, Transport Delay模块的"时间延迟”设置为 150,仿真时间改为1000s,如下图1-4所示:图1-3 PID控制参数设置运行仿真,得如下结果:IP回GamlIntegratordu'dlS S□VieW Simulation FOrmat ToOlS C¾ I ∣-CaΛtel50.5 O500IPlD ≠I ≡ •希刊3片令Uy 卜I IlOOo J⅛orΛal 三爭 E Φ I- F 過应®图1-7 PID 子系统Tim& offset. 0(3) PID 子系统的创建首先将参数 Gain 、Gain1、Gain 三个模块的参数进行设置,如下图所示:图1-5 PID 控制运行结果GarnWO O≡ a [^: P 刃盹逼圖0 ■垢G I airl2 Deirivativ®W FUnCtlOn BlaCk PararrleterS- Gain图1-6 PID 参数设置然后建立PID 控制器子系统,如下图1-7所示:TranSier FCn TransportDelaySietLal AttrLbUEiElIerrt-UriSe g ,aiιι (y =, Je-IaIi吕 FUnCtiOn BIoCk Paranneters≡ Gain2Signal Att ributSaJliJJIe tine (-1 for i≡<P a,E ≥τ∣e i t 6r AttElbulesHlenent5⅞jιple txι≡c (-1 fur IeihKnlt ipLicat iαι∏LS EleMrtt -vise (K. *u) Sanple tune Ii-I for inketLtθd) iElenent-Wije g 自丄n (y = .)LAU) _OE j¾⅛tn⅜ ⅛⅛LΠ Jy ± K ÷ α Oru^K}aV⅛ FUnCtiOn Block Parameters : GainI K⅛LΓi(T)IlU I ltiPIICatiOn5 EIenI l eTSUbSyStem10300s+1出封装编辑器,并进行相应参数设置,如下图1-8、1-9所示,图1-9 PID 子系统封装参数设置tfl MaSk Editor ; SUbSyStemICOn & PortS ParameterS Initialization DOCdrnentatiOn OPtiOnS BIQCk Frame ViSibleIcon TranSParenCy OPaqUe ICOri UnitS AUtOSCaIe ICOn ROtation FiXed POrt ROtatiOn DefaUltkon DraWing COmmandSdisp( PlD Controller')EXamPleS OfdraWing CommandSCOinrD3∩d I lIalr tJLabeI ClabEl ≡peci fi E Por tsj SyntaXPOrtJabel(, oUtPUt l J I J h xy ,)UnmaSkI OK ]3Kel I I HelP ∣ APPly图1-8 PID 子系统封装文本显示¥ MaSlC EditOr: SubsystemKQn & POrH ParameterS InitiaIiZation DOCUmentatiOrl... PromPt Variable TyPe EvaL.. T UIY ., Ta,..1 PID KpIKP edit F 02 3 PID Ti Ti edit +√PtD_TdTdedit »Ell√lDiaICg parameters QPtIOnS for SeIeCtecl Pararneter TyPe-SPeCifiC OPtiOl NO type-specific o ∣GeneriC OPtiOnS In dialog:√l EnabIe ParamShOW Parame lH Dialog callback :UnmaSk CanCelHelP APPly在对图1-9所示封装变量设置完成后,封装后的PID子系统如下图1-10所示图1-10封装后PID控制仿真模型双击图1-10中的PID子系统,按图1-11作参数设置,即可完成PID参数设置。
运动控制系统实验
实验1 转速反馈控制的直流调速系统仿真一、实验目的1.熟练使用MATLAB 下的SIMULINK 软件进行系统仿真。
2.学会用MATLAB 下的SIMULINK 软件建立转速反馈控制的直流调速系统的仿真模型和进行仿真实验的方法。
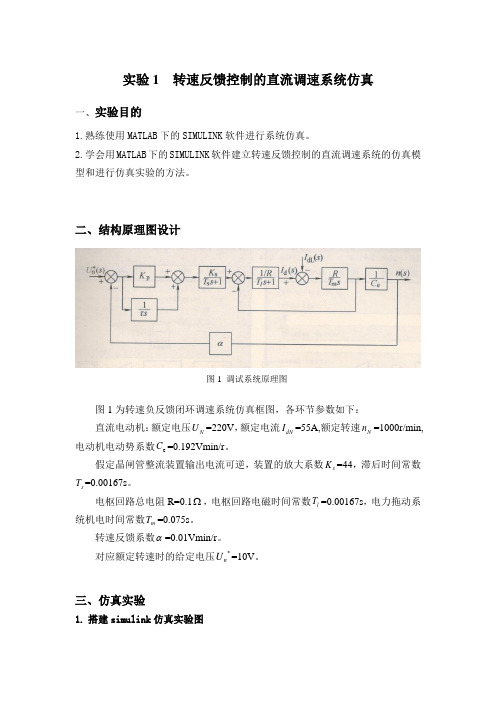
二、结构原理图设计图1 调试系统原理图图1为转速负反馈闭环调速系统仿真框图,各环节参数如下:直流电动机:额定电压N U =220V ,额定电流dN I =55A,额定转速N n =1000r/min,电动机电动势系数e C =0.192Vmin/r 。
假定晶闸管整流装置输出电流可逆,装置的放大系数s K =44,滞后时间常数s T =0.00167s 。
电枢回路总电阻R=0.1Ω,电枢回路电磁时间常数l T =0.00167s ,电力拖动系统机电时间常数m T =0.075s 。
转速反馈系数α=0.01Vmin/r 。
对应额定转速时的给定电压*n U =10V 。
三、仿真实验1. 搭建simulink 仿真实验图搭建完成如图2所示图2 simulink仿真实验图2.基础实验(1)考虑有反馈和无反馈对转速降落差的影响。
下图图3和图4分别为闭环和开环下的示波器显示图图3 闭环情况下的示波器显示图4 开环情况下的示波器显示结论:转速发生偏差时,有反馈系统能有效的抑制,并跟紧给定值;而没有反馈的系统偏差会越来越大。
(2)计算开环机械特性和闭环静特性。
(ss K K P ττ11+=比例积分环节)系统开环机械特性:ed e n S C RIC U K K n -=*1系统闭环静特性:()()K C RI K C U K K n e de n S +-+=*111(3)讨论P 调节、I 调节、PI 调节对快速性和静差的影响。
以下图5、图6分别是P 调节、I 调节的示波器显示图。
图5 P调节下的示波器显示图6 I调节下的示波器显示图根据3种情况下的对比可得以下结论:1.P调节响应速度快,调节动作敏捷,只能减小但无法消除静差。
运动控制系统仿真实验报告——转速、电流反馈控制直流调速系统的仿真
运动控制系统仿真实验报告——转速、电流反馈控制直流调速系统的仿真双闭环直流调速系统仿真对例题3.8设计的双闭环系统进行设计和仿真分析,仿真时间10s 。
具体要求如下: 在一个由三相零式晶闸管供电的转速、电流双闭环调速系统中,已知电动机的额定数据为:60=N P kW , 220=N U V , 308=N I A , 1000=N n r/min , 电动势系数e C =0.196 V·min/r , 主回路总电阻R =0.18Ω,变换器的放大倍数s K =35。
电磁时间常数l T =0.012s,机电时间常数m T =0.12s,电流反馈滤波时间常数i T 0=0.0025s,转速反馈滤波时间常数n T 0=0.015s 。
额定转速时的给定电压(U n *)N =10V,调节器ASR ,ACR 饱和输出电压U im *=8V,U cm =7.2V 。
系统的静、动态指标为:稳态无静差,调速范围D=10,电流超调量i σ≤5% ,空载起动到额定转速时的转速超调量n σ≤10%。
试求:(1)确定电流反馈系数β(假设起动电流限制在1.3N I 以内)和转速反馈系数α。
(2)试设计电流调节器ACR.和转速调节器ASR 。
(3)在matlab/simulink 仿真平台下搭建系统仿真模型。
给出空载起动到额定转速过程中转速调节器积分部分不限幅与限幅时的仿真波形(包括转速、电流、转速调节器输出、转速调节器积分部分输出),指出空载起动时转速波形的区别,并分析原因。
(4)计算电动机带40%额定负载起动到最低转速时的转速超调量σn 。
并与仿真结果进行对比分析。
(5)估算空载起动到额定转速的时间,并与仿真结果进行对比分析。
(6)在5s 突加40%额定负载,给出转速调节器限幅后的仿真波形(包括转速、电流、转速调节器输出、转速调节器积分部分输出),并对波形变化加以分析。
(一)实验参数某晶闸管供电的双闭环直流调速系统,整流装置采用三相桥式电路,基本数据如下: • 直流电动机:220V ,136A ,1460r/min ,C e=0.132Vmin/r ,允许过载倍数λ=1.5; • 晶闸管装置放大系数:K s=40; • 电枢回路总电阻:R =0.5Ω ; • 时间常数:T i=0.03s , T m=0.18s ;• 电流反馈系数:β=0.05V/A (≈10V/1.5I N )。
汽车运动控制仿真实验报告

汽车运动控制系统仿真设计姓名:学号:912110300325班级:9121102001一、题目介绍针对具体的设计对象进行数学建模,然后运用经典控制理论知识设计控制函数,并应用Matla进行仿真分析。
通过本次仿真设计,建立理论知识与生活中对象之间的联系,加深和巩固所学的控制理论知识。
二、控制对象分析1、控制设计对象简化图2、机构特征汽车运动控制系统如图1所示。
忽略车轮的转动惯量,且假定汽车受到的摩擦阻力大小与运动速度成正比,方向与汽车运动方向相反。
根据牛顿运动定律,该系统的模型表示为:mv +bv=uy=v(1)其中,u为汽车驱动力(系统输入),m为汽车质量,b为摩擦阻力与运动速度之间的比例系数,v为汽车速度(系统输出),v为汽车加速度。
3、对系统的参数进行如下设定:汽车质量m=1200kg比例系数b=60 N·s/m汽车的驱动力u=600 N。
三、题目要求分析当汽车的驱动力为600N时,汽车将在5秒内达到10m/s的最大速度。
由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。
这样,该汽车运动控制系统的性能指标设定为:上升时间:<5s;最大超调量:<10%;稳态误差:<2%。
所以,写出控制系统的数学模型:为了得到控制系统传递函数,对式(1)进行拉普拉斯变换,假定系数的初始条件为零,则动态系统的拉普拉斯变换为既然系统输出是汽车的速度,用Y(s)替代v(s),得到msV s+bV s=u(s)Y s=V(s)(2)由于系统输出是汽车的运动速度,用Y(S)替代V(s),得到:msY s+bY s=U(s)(3)该控制系统汽车运动控制系统模型的传递函数为:Y(s) U(s)=1ms+b(4)由此,建立了系统模型。
四、系统模型的仿真根据我们建立的数学模型,求系统的开环阶跃响应由汽车质量m=1200kg,比例系数b=60 N·s/m,汽车的驱动力u=600 N。
运动控制系统实验讲义

运动控制系统实验讲义实验一不可逆单闭环直流调速系统一.实验目的1.研究晶闸管直流电动机调速系统在反馈控制下的工作。
2.研究直流调速系统中速度调节器ASR的工作及其对系统静特性的影响。
3.学习反馈控制系统的调试技术。
二.实验内容1.系统开环工作机械特性。
2.转速负反馈有静差系统工作静特性。
3.转速调节器ASR输出限幅调节。
4.转速反馈信号强度整定及极性判别。
三.实验线路及原理实验线路参见图6-3.2。
四.实验设备及仪器1.MCL—Ⅲ教学实验台主控制屏2.MCL—32T组件3.MCL—31组件4.MCL—33组件5.可调电阻器900Ω/0.4A×26.电机导轨及测速发电机7.直流电动机M038.直流发电机M01 9.双踪示波器 10.万用表五.实验方法1.按图接线,触发电路检查及调试(主电路电源未通电)依次打开实验台主控制屏上的自动开关、中央锁控开关、低压直流开关、激磁电源开关,有正常的电压LED 指示。
参见第四章实验七:(1)同步电源相序、触发电路脉冲检查。
(2)如图6-3.1所示,调节脉冲初始相位α=90°。
2.系统开环工作机械特性。
(1) G (给定)输出直接加至相移控制电压U ct 端。
给定电位器RP1左旋到底,使U ct =0。
电机空载。
(2)合上主电路电源,逐渐调节给定电压U g ,使电机空载转速n 0=1500转/分,调节发电机负载电阻R d ,在空载至额定负载的范围内(0.8A)测取7~8点,读取电机电枢电流I d 以及对应转速n 。
求取系统开环工作机械特性曲线(3)在电机额定状态下(同时满足n=1500 r/min 、I d =0.8 A ),调节FBS 的RP 电位器使转速反馈输出为+5V ,同时,用万用表测取给定电压输出作为U gmax 。
3.转速负反馈有静差系统工作静特性(1)断开主回路电源,ASR的输入“1”端与FBS转速反馈的输出“3”端相连(另外注意转速反馈输出“4”端与给定单元共地),输入“2”端与G (给定)的输出U g端相连,输出“3”端与相移控制电压U ct端相连,“4”端与DZS零速封锁的输出“3”端相连,短接ASR的“5”与“6”端,构成比例调节器。
运动控制实验讲义
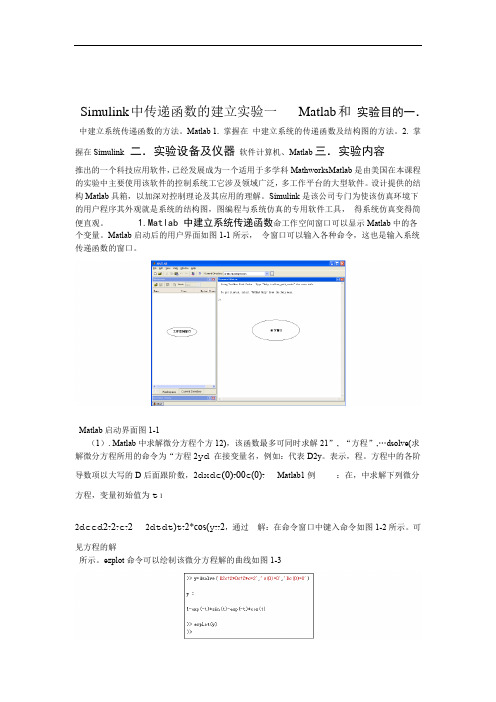
Simulink中传递函数的建立实验一Matlab和实验目的一.中建立系统传递函数的方法。
Matlab 1.掌握在中建立系统的传递函数及结构图的方法。
2.掌握在Simulink二.实验设备及仪器软件计算机、Matlab三.实验内容推出的一个科技应用软件,已经发展成为一个适用于多学科MathworksMatlab是由美国在本课程的实验中主要使用该软件的控制系统工它涉及领域广泛,多工作平台的大型软件。
设计提供的结构Matlab具箱,以加深对控制理论及其应用的理解。
Simulink是该公司专门为使该仿真环境下的用户程序其外观就是系统的结构图,图编程与系统仿真的专用软件工具,得系统仿真变得简便直观。
1.Matlab 中建立系统传递函数命工作空间窗口可以显示Matlab中的各个变量。
Matlab启动后的用户界面如图1-1所示,令窗口可以输入各种命令,这也是输入系统传递函数的窗口。
Matlab启动界面图1-1(1). Matlab中求解微分方程个方12),该函数最多可同时求解21”, “方程”,…dsolve(求解微分方程所用的命令为“方程2yd在接变量名,例如:代表D2y。
表示,程。
方程中的各阶导数项以大写的D后面跟阶数,2dxdc(0)?00c(0)?Matlab1例:在,中求解下列微分方程,变量初始值为t 12dccd2?2?c?22dtdt)t?2*cos(y??2,通过解:在命令窗口中键入命令如图1-2所示。
可见方程的解所示。
ezplot命令可以绘制该微分方程解的曲线如图1-3Matlab中输入微分方程图1-2ezplot命令绘制图形图1-3,zpk。
. Matlab中输入传递函数常用的命令有:tf,printsys(2)可以输入多项式形式的传递函数,首先根据传递函数写出分子多项式,prinfsys 命令tf numnum denden或令tf(,)系数向量。
然后输入命项的数系向量,分母多式的)即可得到传递函数。
《运动控制系统》教案
《运动控制系统》教案一、教学目标1. 了解运动控制系统的概念、组成和作用。
2. 掌握运动控制系统的常见类型及其原理。
3. 学会分析运动控制系统的性能指标。
4. 能够运用运动控制系统的基本原理解决实际问题。
二、教学内容1. 运动控制系统概述运动控制系统的定义运动控制系统的组成运动控制系统的应用领域2. 运动控制系统的类型模拟运动控制系统数字运动控制系统单片机运动控制系统计算机运动控制系统3. 运动控制系统的原理位置控制原理速度控制原理加速度控制原理4. 运动控制系统的性能指标稳态性能指标动态性能指标系统误差指标5. 运动控制系统的硬件组成控制器执行器反馈元件辅助元件三、教学方法1. 讲授法:讲解运动控制系统的基本概念、原理和性能指标。
2. 案例分析法:分析实际运动控制系统的应用案例,加深学生对运动控制系统的理解。
3. 实验法:安排实验室实践环节,让学生亲自动手操作运动控制系统。
4. 小组讨论法:分组讨论运动控制系统的设计和优化方法。
四、教学资源1. 教材:《运动控制系统》2. 课件:运动控制系统的图片、图表、动画等。
3. 实验室设备:运动控制系统实验装置。
4. 网络资源:相关学术论文、企业案例等。
五、教学评价1. 平时成绩:课堂表现、作业、实验报告等。
2. 考试成绩:期末考试,包括选择题、填空题、计算题和论述题。
3. 实践能力:实验室操作运动控制系统的表现。
4. 综合素质:小组讨论、课堂提问、问题解答等。
六、教学安排1. 课时:本课程共计32课时,包括16次课堂讲授,8次实验操作,8次小组讨论。
2. 授课方式:课堂讲授与实验操作相结合,小组讨论与个人作业相辅相成。
3. 进度安排:按照教材和课件内容,依次讲解各个章节,安排实验和小组讨论。
七、实验环节1. 实验目的:通过实际操作,让学生深入了解运动控制系统的原理和应用。
2. 实验内容:包括运动控制系统的搭建、调试和性能测试。
八、小组讨论1. 讨论主题:运动控制系统的设计与优化。
运动控制系统的建模与仿真分析
运动控制系统的建模与仿真分析运动控制系统是现代机器人、半导体设备、医疗设备等行业中的关键技术之一,它可以帮助设备快速反应和调整,实现更加精准的动作和控制。
为了更好地理解和优化运动控制系统,需要进行建模和仿真分析。
本文将介绍运动控制系统建模和仿真分析的过程及其意义。
一、运动控制系统的建模运动控制系统的建模是指将实际运动控制系统转化为数学模型的过程,这一过程可以帮助我们更好地理解运动控制系统的工作原理和特性,为后续的仿真分析提供基础。
建模过程中需要考虑的因素包括:运动控制器、执行器、传感器、反馈回路等。
首先,需要将控制器的输入和输出进行建模,其中输入一般为期望得到的输出信号,输出一般是控制信号。
然后,需要将执行器的动态响应和性能进行建模,其中包括机械结构和控制结构等。
另外,还需要考虑传感器的反馈信号和反馈回路的响应特性等。
在建模过程中,需要根据实际情况选择合适的数学模型,其中最常用的数学模型包括PID(比例积分微分)控制器、传递函数模型、状态空间模型等。
在此基础上,可以利用MATLAB等工具进行仿真分析。
二、运动控制系统的仿真分析运动控制系统的仿真分析可以帮助我们预测系统的性能和响应,发现并解决系统可能存在的问题,并通过修改模型参数优化系统。
在进行仿真分析时,需要注意以下几点。
首先,需要准确地确定模型参数,以保证仿真分析结果的可靠性。
其次,需要模拟实际工作条件,并考虑不同工况的影响。
最后,需要进行数据分析,对仿真结果进行评估和分析。
在仿真分析中,需要关注一些关键指标,如控制系统的稳定性、响应时间、静态误差、动态误差等,这些指标可以帮助我们理解控制系统的特性和性能,并进行优化。
三、运动控制系统建模和仿真分析的意义运动控制系统建模和仿真分析可以帮助我们更好地理解和优化运动控制系统,从而提高系统的性能和可靠性。
具体来说,建模和仿真分析的意义如下:1. 优化系统性能。
通过建模和仿真分析,可以发现并解决系统可能存在的问题,优化系统的性能。
单摆运动控制系统设计与仿真实验报告

单摆运动控制系统设计与仿真实验报告1.引言1.1 概述概述部分的内容:单摆运动控制系统是一个常见的控制系统应用领域,它在诸多科学实验、工程项目和技术研究中都有广泛的应用。
单摆运动控制系统通过控制摆臂的运动,实现对摆臂的稳定性和精确度的控制,从而达到预定位置、速度和加速度的要求。
随着科技的不断发展和进步,单摆运动控制系统的设计和仿真实验成为研究者们关注的焦点。
在过去的几十年中,众多学者和工程师们提出了各种各样的方法和理论,以提高单摆运动控制系统的性能和效果。
这些方法包括但不限于PID控制、自适应控制、模糊控制等等。
它们都在不同的场景中展现了自己的优势和特点,为单摆运动控制系统的设计和仿真实验提供了全新的思路和方法。
本文旨在介绍单摆运动控制系统的设计和仿真实验。
首先,我们将对单摆运动控制系统的相关背景和理论基础进行概述和分析。
接着,我们将详细介绍单摆运动控制系统的设计过程,包括系统结构、控制算法和参数选择等方面。
在设计完成后,我们将进行仿真实验,在不同的工作条件下对系统进行测试和评估,以验证设计的有效性和性能。
最后,我们将总结本文的研究成果,并对未来的研究方向进行展望。
通过本文的研究,我们希望能够为单摆运动控制系统的设计和仿真实验提供实用有效的方法和理论支持,为相关领域的研究者和工程师提供参考和借鉴。
同时,我们也期待通过本文的工作,能够推动单摆运动控制系统设计的进一步发展和应用。
文章结构部分的内容可以如下所示:1.2 文章结构本文主要分为三个部分,即引言、正文和结论。
引言部分主要概述了文章内容和研究背景,介绍了单摆运动控制系统设计与仿真实验的目的和重要性。
正文部分包括两个主要内容,即单摆运动控制系统设计和仿真实验。
在单摆运动控制系统设计中,我们将介绍系统的原理和设计方法,并详细描述系统的硬件和软件实现。
在仿真实验中,我们将使用相关仿真软件进行系统的仿真,验证设计的有效性和准确性。
结论部分对本文的主要内容进行总结,回顾了实验的结果和分析,总结了系统的性能和局限性。
运动控制实验报告2讲解
电压空间矢量控制仿真1. 实验目的与要求异步电机结构简单,运行可靠,维修方便,在日常生活和工业生产中得到了越来越广泛的应用,但交流异步电机的数学模型是一个高阶、非线性、强耦合的多变量系统 [1], 在交流电机调速中 ,V/f控制对于需要快速动态响应的应用场合则效果欠佳 ,特别是在速度或转矩发生快速变化时 , 会产生较高的转差率 ,从而导致较大的瞬态电流,异步电动机转差频率型矢量控制作,为高性能力矩控制正在逐渐广泛应用[2]。
与传统的正弦波脉宽调制 (SPWM 相比,空间矢量脉宽调制(SVPWM 具有线性调制范围宽、直流电压利用率高、输出电压谐波小和易于数字化实现的特点 , 因而在变频调速和无功补偿等电力电子变换器应用领域得到更加广泛的应用 [3]。
计算机仿真技术是现代科学研究和产品设计的新手段。
仿真时首先建立应用系统的仿真模型 , 然后利用计算机去求解 , 因而较其它方法容易、快捷、经济。
其具有应用的可重复性针 , 对不同的系统 , 有时只需要更改个别环节或修改参数即可。
由于以上的优点 , 计算机仿真技术作为强有力的研究工具 , 正在控制领域获得广泛的应用 [4]。
随着生产技术的不断发展,直流拖动的薄弱环节逐步显露出来,而异步电动机结构简单、坚固耐用、便于维修, 受到人们的欢迎。
近年交流电动机的控制技术取得了突破性的进展,与传统的正弦波脉宽调制相比,空间矢量脉宽调制(SVPWM 具有线性调制范围宽直流电压利用率高输出电压谐波小和易于数字化实现的特点,因而在变频调速和无功补偿等电力电子变换器应用领域得到更加广泛的应用但对于电机控制系统的研究,但传统的解析方法是分析研究周期长、投资大而且不宜分析系统的各种性能,因此,采用数字仿真的方法是必要的 [5]。
2. 实验原理2.1电压空间矢量 PWM (SVPWM 控制技术把逆变器和交流电动机视为一体,以圆形旋转磁场为目标来控制逆变器的工作,这种控制方法称作“磁链跟踪控制” ,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的,所以又称“电压空间矢量 PWM (SVPWM , Space Vector PWM控制”空间电压矢量脉宽调制 (SVPWM 是满足圆形气隙磁场要求的控制方法 ,具有降低转矩脉动 ,减小波形畸变 ,提高直流电压利用率 ,易于数字化实现等优点 ,目前广泛用于交流电机调速控制系统中 [7]。
运动控制讲义
实验一单闭环不可逆直流调速系统实验一、实验目的(1)了解单闭环直流调速系统的原理、组成及各主要单元部件的原理。
(2)掌握晶闸管直流调速系统的一般调试过程。
(3)认识闭环反馈控制系统的基本特性。
二、实验所需挂件及附件三、实验线路及原理为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(包括单闭环系统和多闭环系统)。
对调速指标要求不高的场合,采用单闭环系统,而对调速指标较高的则采用多闭环系统。
按反馈的方式不同可分为转速反馈,电流反馈,电压反馈等。
在单闭环系统中,转速单闭环使用较多。
在本装置中,转速单闭环实验是将反映转速变化的电压信号作为反馈信号,经“转速变换”后接到“速度调节器”的输入端,与“给定”的电压相比较经放大后,得到移相控制电压U ct,用作控制整流桥的“触发电路”,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变“三相全控整流”的输出电压,这就构成了速度负反馈闭环系统。
电机的转速随给定电压变化,电机最高转速由速度调节器的输出限幅所决定,速度调节器采用P(比例)调节对阶跃输入有稳态误差,要想消除上述误差,则需将调节器换成PI(比例积分)调节。
这时当“给定”恒定时,闭环系统对速度变化起到了抑制作用,当电机负载或电源电压波动时,电机的转速能稳定在一定的范围内变化。
在电流单闭环中,将反映电流变化的电流互感器输出电压信号作为反馈信号加到“电流调节器”的输入端,与“给定”的电压相比较,经放大后,得到移相控制电压U ct,控制整流桥的“触发电路”,改变“三相全控整流”的电压输出,从而构成了电流负反馈闭环系统。
电机的最高转速也由电流调节器的输出限幅所决定。
同样,电流调节器若采用P(比例)调节,对阶跃输入有稳态误差,要消除该误差将调节器换成PI(比例积分)调节。
当“给定”恒定时,闭环系统对电枢电流变化起到了抑制作用,当电机负载或电源电压波动时,电机的电枢电流能稳定在一定的范围内变化。
四、实验内容(1)U ct不变时直流电动机开环特性的测定。
运动控制系统实验指导书
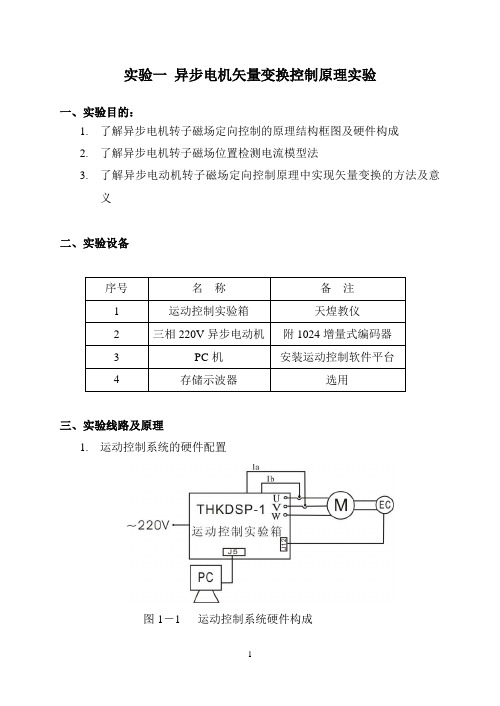
实验一异步电机矢量变换控制原理实验一、实验目的:1.了解异步电机转子磁场定向控制的原理结构框图及硬件构成2.了解异步电机转子磁场位置检测电流模型法3.了解异步电动机转子磁场定向控制原理中实现矢量变换的方法及意义二、实验设备三、实验线路及原理1.运动控制系统的硬件配置图1-1 运动控制系统硬件构成图1-1为本系统的硬件配置框图。
THKDSP-1为运动控制实验箱,箱内装有DSP主控板(B1),功率驱动板(B2)及控制电源和功率模块板(B3)。
图1-2为DSP主控板的组成框图。
它包括DSP芯片;RAM芯片IC1、IC2;E2PROM存储器芯片IC3;用于RS232串行通信的接口芯片IC4以及MC-BUS I/O连接器J1、J2。
图1-2 DSP主控板组成框图图1-3为功率驱动板框图。
它包括电动机两相电流I a,I b(Iu、Iv)检测;直流母线电压V dc检测电路;保护电路;PWM信号驱动电路。
图1-3 功率驱动板电路结构框图电源功率模块板包括﹢5V,±15V, +15V三组电源和由六个IGBT构成的逆变电路。
2.异步电动机转子磁场定向控制的原理图1-4 转子磁场定向控制原理框图电机的相电流i a,i b检测之后,经过3/2变换(Park变换)和旋转变换后得到旋转变换坐标上的二个分量i sd,i sq,这两个分量分别与磁通参考值i sdref和转矩参考值i sqref比较之后送入电流和磁通调节器PI。
电流调节器的输出即为在旋转坐标上的电压分量参考值U dref和U qref;此二分量经旋转逆变换和3/2变换(Park变换)之后得到定子三相电压的参考值U aref,U bref,U cref。
根据U aref,U bref,U cref产生三相逆变器的PWM驱动信号。
转子磁通的位置角θ则由电机的模型和电机速度反馈信号计算而得。
四、实验内容1.熟悉运动控制的系统硬件构成2.异步电机转子磁场定向控制(FOC)得输入信号测量,i a、i b和转子磁场位置角计算3.电流信号的3/2变换(Park变换)及旋转变换4.i sd,i sq波形观察,并与i sdref,i sqref作比较五、预习要求1.仔细阅读FOC控制原理的有关章节2.3/2变换(Park变换)与旋转变换的计算公式3.画出异步电机的电流模型框图及有关θ计算公式4.画出电压、电流和转子磁通的空间向量及旋转坐标的d-q轴,静止坐标a-b-c、和α-β。
运动控制仿真实验报告
运动控制仿真实验报告实验11,晶闸管单相交流调压仿真实验一,实验原理1.1原理图该实验是通过晶闸管的调压触发控制电路来控制晶闸管导通,以此来实现不同导通角时,输出电压不同。
该实验的原理电路如图1所示。
图1通过两个触发脉冲来触发VT1与VT2,触发电路的原理框图如图2所示。
图2该触发电路两个触发脉冲相差180°,以此来实现正半周和负半周都进行调压,而且调压的脉冲角是相同。
1.2 仿真模型1.3 脉冲发生器子模块参考模型其中斜率限制器上升斜率=1;下降斜率=-inf;放大器增益=1000;Relay 使能过0 检测。
Fcn=10*u(1)/180 完成指令角度到比较电压的转换。
指令通过常数按触发角设定。
二.实验内容根据原理框图构建 Matlab 仿真模型。
所需元件参考下表:仿真元件库:Simulink Library Browser示波器 Simulink/sink/Scope交流电源 SimPowerSystems/Electrical Sources/AC Voltage Source设定电压=220*1.414V晶闸管 SimPowerSystems/Power Electronics/ ThyristorFcn Simulink/User-Defined Functions/Fcn设定为10*u(1)/180Relay Simulink/Discontinuities/RelayRate Limiter Simulink/Discontinuities/ Rate LimiterSubsystem Simulink/Commonly Used Block/Subsystem电阻、电容、电感 SimPowerSystems/Elements/Series RLC Branch设定参数负载电阻2 欧姆、串联电感2mH。
电流傅立叶分解 SimPowerSystems/Extra Library/Discrete Measurements/Discrete Fourier设定输出为50Hz,基波显示 Simulink/sinks/Display电压检测SimPowerSystems/Measurements/Voltage Measurement电流检测SimPowerSystems/Measurements/Current Measurement仿真设定:Configuration Parameters/Solver optionsType Variable-step Solver Ode23sRelative tolerance 1e-5其它不变仿真时间0.1 秒。
运动控制ppt课件

模糊规则的制定和隶属度函数的选取需要一定的 经验和技巧,且计算量较大。
神经网络算法在运动控制中的优化
神经网络算法原理
通过模拟人脑神经元的结构和功能,构建多层神经网络模 型,利用样本数据对模型进行训练和优化。
在运动控制中的优化
神经网络算法可以用于运动控制系统的建模、辨识和优化 。例如,在电机参数辨识、运动轨迹规划等领域,神经网 络算法能够提高系统的精度和效率。
深入理解运动控制系统的基本原理
通过实验,学生应能够加深对运动控制系统基本原理的理解,包括控制器设计、系统稳 定性分析等方面。
培养实验操作能力和数据分析能力
学生应具备独立进行实验操作和数据分析的能力,能够根据实验数据得出合理的结论。
实验步骤和数据记录
搭建运动控制系统仿真模型
在MATLAB/Simulink环境中,根据实验要求搭建运动控制系统的 仿真模型,包括控制器、执行器、传感器等部分。
利用物联网和大数据技术,实现远程 监控和智能维护,提高维护效率和质 量。
寿命预测与健康管理
基于历史数据和实时监测信息,预测 系统剩余寿命和健康状况,制定维护 计划。
多轴协同和同步控制技术
多轴协同控制
针对多轴运动系统,设计 协同控制策略,实现各轴 之间的协调运动,提高系 统整体性能。
同步控制技术
通过精确的时序控制和同 步机制,实现多轴运动系 统的同步运行,保证系统 稳定性和精度。
设置仿真参数和运行仿真
根据实验需求设置合适的仿真参数,如仿真时间、步长等,并运行 仿真,记录仿真过程中的关键数据。
分析仿真结果
对仿真结果进行分析,包括系统响应曲线、误差曲线等,以评估系 统的性能。
实验结果分析和讨论
系统性能评估
运动控制系统实验报告

运动控制系统实验报告
专业班级
学号
姓名
学院名称
运动控制仿真实验报告
一、实验内容与要求
1.单闭环转速负反馈
2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建 具体要求:针对1 2
(1)仿真各环节参数
(2)仿真模型的建立
(3)仿真结果,分为空载还是负载,有无扰动
(4)仿真结果分析
二、Simulink 环境下的仿真
1.单闭环转速负反馈
1.1转速负反馈闭环调速系统仿真各环节参数 直流电动机:额定电压N U =220V ,额定电流dN I =55A ,额定N n =1000r/min ,电动机电动 势系数e C =0.192V ·min/r 。
假定晶闸管整流装置输出电流可逆,装置的放大系数s K =44,滞后时间常数 s T =0.00167s 。
电枢回路总电阻R=1.0Ω,电枢回路电磁时间常l T =0.00167s ,电力拖动统机电时间 常数m T =0.075s 。
转速反馈系数α=0.01V ·min/r 。
对应额定转速是的给定电压 n U =10V 。
1.2仿真模型的建立
图1-1单闭环转速负反馈直流调速系统的仿真模型
PI 调节器的值定为 =0.56, = 11.43。
图1-2单闭环转速负反馈直流调速系统加入扰动负载时的仿真模型
1.3仿真结果
p K
1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《运动控制系统仿真》实验讲义
谢仕宏
实验一、闭环控制系统及直流双闭环调速系统仿真
一、实验学时:6学时
二、实验内容:
1. 已知控制系统框图如图所示:
图1-1 单闭环系统框图
图中,被控对象s e s s G 150130010)(-+=
,Gc(s)为PID 控制器,试整定PID 控制器参数,并建立控制系统Simulink 仿真模型。
再对PID 控制子系统进行封装,要求可通过封装后子系统的参数设置页面对Kp 、Ti 、Td 进行设置。
2. 已知直流电机双闭环调速系统框图如图1-2所示。
试设计电流调节器ACR 和转速调节器ASR 并进行Simulink 建模仿真。
图1-2 直流双闭环调速系统框图
三、实验过程:
1、建模过程如下:
(1)PID控制器参数整顿
T2.1=,Ti=τ2=300,根据PID参数的工程整定方法(Z-N法),如下表所示, Kp=
τK
Td=τ5.0=75。
表1-1 Z-N法整定PID参数
(2)simulink仿真模型建立
建立simulink仿真模型如下图1-3所示,并进行参数设置:
图1-3 PID控制系统Simulink仿真模型
图1-3中,step模块“阶跃时间”改为0,Transport Delay模块的“时间延迟”设置为150,仿真时间改为1000s,如下图1-4所示:
图1-3 PID控制参数设置
运行仿真,得如下结果:
图1-5 PID控制运行结果
(3)PID子系统的创建
首先将参数Gain、Gain1、Gain三个模块的参数进行设置,如下图所示:
图1-6 PID参数设置
然后建立PID控制器子系统,如下图1-7所示:
图1-7 PID子系统
再对PID子系统进行封装,选中“Subsystem”后,单击鼠标右键,选择“Mask subsystem”,弹出封装编辑器,并进行相应参数设置,如下图1-8、1-9所示,
图 1-8 PID子系统封装文本显示
图1-9 PID子系统封装参数设置
在对图1-9所示封装变量设置完成后,封装后的PID子系统如下图1-10所示
图1-10封装后 PID控制仿真模型
双击图1-10中的PID子系统,按图1-11作参数设置,即可完成PID参数设置。
图1-11 PID控制器参数设置
封装后运行仿真,结果如图1-12所示:
图1-12封装后系统运行结果
2、建模方法:
图1-2中r(t)为给定输入,采用阶跃信号。
Y(t)为系统输出,表示直流电机的转速。
ASR为转速调节器,由PI调节器组成。
ACR为电流调节器,也是一个PI调节器。
根据直流双闭环调速系统工程整定方法,进行ASR和ACR的参数整定时,首
先断开转速环,整定电流调节器ACR 。
然后接通转速环,整定转速环ASR ,同时调节电流环参数。
根据上述分析,首先建立直流双闭环调速系统的高层仿真模型,其中转速调节器和电流调节器由空白子系统组成,如图1-13所示。
图2-1 直流双闭环调速系统Simulink 仿真模型
图1-13中给定速度输入信号R (t )由信号源模块库的Step (阶跃)信号生成,通过改变阶跃信号的幅值,可以改变双闭环调速系统给定输入电压,其变化范围为-10V ~10V 。
负载电流信号IL 也由阶跃信号生成,通过改变阶跃输入信号的幅值和时间,可观察系统在不同负载下的转速响应。
输入滤波环节
101.01+s 、转速反馈环节101.0007.0+s 、电流反馈环节1
002.005.0+s 、转速调节器输入滤波环节1002.01+s 及其他模块为传递函数描述的数学模型,在Simulink 仿真中,可使用Continue (连续系统)模块库的Transfer Fcn 模块实现。
增益模块可以使用Math (数学)模块库的Gain 来实现。
转速调节器ASR 和电流调节器ACR 首先由两个空白子系统组成,结果如图1-13所示。
下面对转速调节器ASR 和电流调节器ACR 进行设计,结果如图1-14和图1-15所示。
对图1-14和图1-15所示的子系统进行封装,可得如图1-16所示的结果。
利用工程整定及Simulink动态调试的方法,对转速调节器和电流调节器进行参数整定,参数结果如图1-16所示。
图1-14 转速调节器子系统Simulink模型图1-15 电流调节器子系
统Simulink模型
图1-16 转速调节器ASR与电流调节器ACR封装后参数设置对话框Simulink求解器取系统默认值,运行仿真可得如图1-17所示的转速、电流响应曲线及图1-18所示的转速调节器输出和电流调节器输出。
从仿真结果可以看出,电流、转速响应达到工程设计要求。
(a)电流响应(b)速度响应
图1-17 直流双闭环调速系统电流及速度响应
(a)转速调节器输出(b)电流调节器输出
图1-18 转速调节器及电流调节器输出
试验二、交-直-交变频调速系统仿真分析
一、实验学时:6
二、实验内容:
1、建立三相桥式不可控整流电路,带10 欧姆电阻负载,观察输入电流,输出电压波形。
并对输入电流作谐波分析。
2、建立PWM逆变电路仿真模型,在带三相对称的纯电阻负载时,每相电阻10欧姆,观察输出50Hz时的电压波形,并对比不同载波频率下输出电压谐波分量。
3、将1和2中的整流和逆变电路连接起来,构建完整的交-直-交变频调速系统仿真模型。
4、带15kw电机负载。
负载转矩20Nm。
观察50Hz下电源侧输入电流波形及谐波含量;观察频率由25Hz变换到50Hz时电机输出转速及电磁转矩的波形。
三、实验步骤:
1、建立三相桥式不可控整流电路,带10 欧姆电阻负载,观察输入电流,输出电压波形。
并对输入电流作谐波分析。
三相桥式整流电路建模如下
(1)构建仿真模型
图2-1 三相桥式全控整流电路
(2)设置仿真参数
图2-2三相电源参数设置
图2-3通用桥模块参数设置
图2-4 电阻模型参数设置
图2-5电流示波器参数设置
仿真最大步长设置为,仿真时间设置为,运行仿真,输入a相电流波形如下图2-6所示:
图2-6三相桥式不可控整流输入A相电流波形
单击Powergui模块,再弹出的窗口中单击FFT“ Analysis ”菜单按钮,打开傅立叶分析窗口,如图2-8所示。
图2-7 Powergui模型
图2-8 傅立叶分析窗口
按图2-8所示设置参数,按后单击“Display”按钮,即可完成对Ia 电流信号的谐波分析。
总谐波电流含量%。
2、建立PWM逆变电路仿真模型,在带三相对称的纯电阻负载时,每相电阻10欧姆,观察输出50Hz时的电压波形,并对比不同载波频率下输出电压谐波分量。
建立PWM逆变电路如下图2-9所示
图2-9 PWM逆变电路仿真模型
图中模块参数设置:
图2-10 直流电源模块和电阻负载模块参数设置
图2-11 通用桥模块参数设置
图2-12 PWM发生器模块参数设置
图2-13 电压示波器参数设置
图2-13 电流示波器参数设置
将仿真算法改为ode15s,仿真时间改为,最大仿真步长改为,运行仿真,可得电压电流波形如下:
图2-14 PWM逆变电路相电流及相电压/线电压波形单击Powergui模块,再单击FFTAnalysis按钮,进行谐波分析:
图2-15 A相电流谐波分析
图2-16 线电压UAB谐波分析
改变PWM逆变模块参数设置,再次仿真并分析电流谐波含量.
图2-17 PWM发生器模块参数改动前后对比
图 2-18 输出线电压谐波分析
3 将1和2中的整流和逆变电路连接起来,构建完整的交-直-交变频调速系统仿真模型。
图2-19 AC-DC-AC 电路仿真模型
将图2-19中电容C的参数由1e-3改为1e-2,观察改变前后直流环节的电压电流。
再观察输入交流电流波形。
图2-20直流环节电流、电压波形(电容C=)
图2-20直流环节电流、电压波形(电容C=)
图2-21交流电源输入电流波形
试分析图2-21的原因,并改善电流波形。
4 将三相纯电阻负载换为三相交流异步电动机,建立变频调速系统仿真模型,如下图所示。
AC-DC-AC变频调速系统仿真模型
电机模块参数设置
电机测量模块参数设置
图电机转速及转矩响应。