基于matlab鸟声识别机场驱鸟报警系统
智慧机场鸟情监测系统建设方案

智慧机场鸟情监测系统建设方案一、项目背景和意义随着世界经济的发展和人口的增加,航空业得到了迅猛发展。
然而,与此同时,鸟类对航空安全造成了一定的威胁。
鸟类在机场附近觅食、筑巢和栖息,有时候会误入机场跑道或飞机发动机进气道,造成飞机事故和航班延误等问题。
因此,建设一套智慧机场鸟情监测系统,可以对机场周边的鸟类活动进行实时监测和预警,为航空安全提供保障。
二、系统构成1.鸟类监测设备:包括红外线传感器、声音识别设备、摄像头等,用于检测和识别鸟类的活动情况。
2.数据采集和传输模块:负责收集鸟类监测设备的数据,并将数据传输至后台服务器。
3.后台服务器:对采集到的数据进行分析和处理,并生成报表和预警信息。
4.用户界面和显示器:为机场工作人员提供实时监测数据和预警信息,使其能够及时采取相关措施。
五、系统工作流程1.鸟类监测设备不间断地监测机场周边的鸟类活动,包括鸟类的数量、种类以及活动区域等。
2.数据采集和传输模块实时采集并传输监测设备的数据至后台服务器。
3.后台服务器对采集到的数据进行分析和处理,判断是否出现异常情况。
4.若监测到鸟类活动异常或潜在威胁,后台服务器会发送预警信息至用户界面和显示器。
5.机场工作人员根据预警信息,采取相应的措施,例如驱赶鸟类或改变起降方式等,以确保航空安全。
六、系统特点1.网络化:整个系统在各个环节间通过网络进行数据传输和信息交互,实现了远程监测和及时响应。
2.自动化:鸟类监测设备可以自动识别鸟类的活动情况,后台服务器可以自动分析和处理数据,并生成相关报表和预警信息。
3.实时性:系统能够实时监测鸟类活动情况,并提供实时的预警信息,使机场工作人员能够及时采取措施。
4.监测预警:系统不仅能监测鸟类的活动情况,还能通过数据分析和处理,判断是否出现潜在威胁,提供预警信息,为航空安全提供保障。
5.用户友好:系统的用户界面和显示器提供清晰易懂的监测数据和预警信息,方便机场工作人员进行操作和决策。
《机场智能驱鸟人机交互系统设计与实现》
《机场智能驱鸟人机交互系统设计与实现》一、引言随着航空交通日益繁忙,机场的安全问题也变得尤为重要。
在机场的日常管理中,驱鸟是一项非常重要的工作。
智能驱鸟人机交互系统的设计和实现对于确保航空器的安全、维护航空秩序至关重要。
本文将深入探讨智能驱鸟人机交互系统的设计与实现,以及该系统在机场安全保障方面的应用。
二、系统设计背景与目标在传统的机场驱鸟工作中,大多数依靠人力来完成驱鸟任务。
然而,这种方法在效率和准确性上都有很大的不足。
为解决这一问题,我们需要开发一种机场智能驱鸟人机交互系统。
该系统的设计背景在于提高机场的驱鸟效率,降低因鸟类活动导致的航空事故风险。
目标是通过采用先进的人工智能技术,实现人与机器的协同工作,实现对机场范围内鸟类的实时监测与有效驱赶。
三、系统设计与技术实现1. 系统架构设计本系统采用分层设计思想,主要分为数据采集层、数据处理层、人机交互层三个部分。
数据采集层通过摄像头、雷达等设备实时收集机场范围内的鸟类活动数据;数据处理层负责对这些数据进行处理与分析,以识别鸟类的种类、数量和活动轨迹;人机交互层则负责将处理后的数据以直观的方式展示给工作人员,并接受工作人员的指令,实现对鸟类的有效驱赶。
2. 关键技术实现(1)数据采集:本系统采用高清摄像头和雷达设备,实时收集机场范围内的鸟类活动数据。
其中,高清摄像头可捕捉到鸟类的图像信息,雷达则可监测鸟类的飞行轨迹和速度。
(2)数据处理:本系统采用基于深度学习的图像识别技术,对收集到的鸟类图像进行分类和识别。
同时,结合雷达数据,可实现对鸟类活动轨迹的实时监测和预测。
此外,系统还采用大数据分析技术,对历史数据进行挖掘和分析,以了解鸟类的活动规律和习性。
(3)人机交互:本系统通过图形化界面展示鸟类活动数据和预测结果,方便工作人员查看和分析。
同时,系统支持语音识别和语音合成技术,工作人员可以通过语音指令控制系统的运行。
此外,系统还具有远程控制功能,可实现跨区域、跨时区的协同工作。
鸟击防范智慧系统设计方案
鸟击防范智慧系统设计方案鸟击防范智慧系统是一种通过智能技术来监测和预防鸟类对建筑物、飞机、农田等区域造成的损害的系统。
本文将从系统的原理、硬件设备和软件算法三个方面进行设计方案的介绍。
一、系统原理鸟击防范智慧系统的原理是通过摄像头、传感器等硬件设备对目标区域进行监测,并通过图像识别、声音识别等算法来判断鸟类的行为和位置,从而预测鸟击风险并采取相应的措施来防范。
二、硬件设备1. 高清摄像头:用于捕捉目标区域的图像和视频,以便进行鸟类识别和行为分析。
2. 红外传感器:用于监测目标区域的动态变化,如鸟类的飞行轨迹和速度等。
3. 声音传感器:用于捕捉鸟类发出的声音,从而判断鸟类的种类和行为。
4. 控制器:用于接收和处理传感器采集的数据,并根据算法判断鸟击风险并采取相应的措施。
三、软件算法1. 鸟类图像识别算法:基于深度学习的图像识别算法,通过对摄像头采集的图像进行处理,可以判断图像中是否有鸟类出现,并识别鸟类的种类。
2. 鸟类行为分析算法:通过对鸟类的图像和视频进行分析,可以判断鸟类的飞行轨迹、速度以及飞行高度等信息,从而预测鸟击风险。
3. 声音识别算法:通过对声音传感器采集的数据进行处理和分析,可以识别鸟类发出的声音,并判断鸟类的种类和行为。
4. 鸟击风险评估算法:基于传感器采集的数据和算法判断结果,综合评估目标区域的鸟击风险,并给出相应的警报和建议措施。
四、系统工作流程1. 硬件设备采集数据:高清摄像头、红外传感器和声音传感器等硬件设备同时工作,对目标区域进行数据采集。
2. 数据处理和分析:控制器接收和处理传感器采集的数据,并通过算法进行图像识别、声音识别和行为分析。
3. 鸟击风险评估:综合分析传感器采集的数据和算法判断结果,评估目标区域的鸟击风险。
4. 预警和措施采取:根据鸟击风险评估结果,发出警报并采取相应的措施,如发出声音警报、启动防鸟器等。
五、系统的应用鸟击防范智慧系统可以广泛应用于城市建筑、农田、机场等需要防范鸟击风险的场所。
基于特征融合和B-SVM的鸟鸣声识别算法
基于特征融合和B-SVM的鸟鸣声识别算法
陈晓;曾昭优
【期刊名称】《声学技术》
【年(卷),期】2024(43)1
【摘要】为了实现在野外通过低成本嵌入式系统识别鸟类,提出了基于特征融合和B-SVM的鸟鸣声识别方法。
对鸟鸣声信号提取梅尔频率倒谱系数、翻转梅尔频率倒谱系数、短时能量和短时过零率组成特征参数,通过线性判别算法对特征参数进行特征融合。
利用黑寡妇算法通过测试集对支持向量机模型的核参数和损失值进行优化得到B-SVM模型。
利用Xeno-canto鸟鸣声数据集对本文算法进行了测试,结果表明该方法的识别准确率为93.23%。
算法维度参数的大小和融合特征维度的高低是影响算法识别效果的重要因素。
在相同条件下,文中所提的基于特征融合和B-SVM模型的鸟鸣声识别算法相较于其他特征参数和模型,识别的准确率更高,为野外鸟类识别提供了参考。
【总页数】8页(P119-126)
【作者】陈晓;曾昭优
【作者单位】南京信息工程大学电子与信息工程学院;南京信息工程大学江苏省大气环境与装备技术协同创新中心
【正文语种】中文
【中图分类】TN912
【相关文献】
1.基于特征融合和粒子群优化算法的运动想象脑电信号识别方法
2.基于特征融合的变电设备类型及故障识别算法研究
3.基于特征融合的人脸表情识别算法研究
4.基于特征融合的小样本个体识别算法
5.基于特征定位与融合的行人重识别算法
因版权原因,仅展示原文概要,查看原文内容请购买。
《面向功能的机场驱鸟ROS软件系统设计》

《面向功能的机场驱鸟ROS软件系统设计》一、引言随着航空交通的快速发展,机场安全成为了重中之重。
其中,鸟类活动对机场运行安全构成了严重威胁。
为了有效解决这一问题,本文提出了一种面向功能的机场驱鸟ROS(Robot Operating System)软件系统设计。
该系统设计旨在提高机场安全性能,确保飞机的正常起降与安全飞行。
二、系统设计背景及目标机场驱鸟ROS软件系统设计主要针对现有机场驱鸟技术存在的问题和需求。
当前,传统的人工驱鸟方法效率低下且难以满足大范围驱鸟的需求。
此外,现有的电子驱鸟设备缺乏统一管理和智能化操作的能力。
因此,该系统的设计目标是实现机场驱鸟的智能化、自动化和高效化,以提高机场安全性能。
三、系统设计功能1. 实时监测功能:通过安装摄像头等设备,实时监测机场各区域的鸟类活动情况,为后续的驱鸟操作提供依据。
2. 智能分析功能:利用图像识别和机器学习技术,对监测到的鸟类活动进行智能分析,判断其是否可能对飞机造成威胁。
3. 自动驱鸟功能:根据智能分析结果,自动控制驱鸟设备(如声波装置、驱鸟车等)进行驱鸟操作。
4. 统一管理功能:实现电子驱鸟设备的统一管理和远程控制,提高设备的管理效率和驱鸟效果。
5. 数据记录与统计分析功能:记录鸟类活动数据和驱鸟操作数据,为后续的优化和改进提供依据。
四、系统架构设计本系统采用ROS作为基础架构,实现各模块的协同工作。
系统架构包括感知层、决策层和执行层。
1. 感知层:负责实时监测机场各区域的鸟类活动情况,通过摄像头等设备采集数据。
2. 决策层:利用图像识别和机器学习技术对感知层传输的数据进行智能分析,判断是否需要启动驱鸟操作。
同时,根据历史数据和实时数据对驱鸟策略进行优化。
3. 执行层:根据决策层的指令,自动控制驱鸟设备进行驱鸟操作。
同时,将驱鸟操作数据和鸟类活动数据记录到数据库中。
五、关键技术及实现1. 图像识别技术:通过训练深度学习模型,实现对鸟类活动的智能识别和分类。
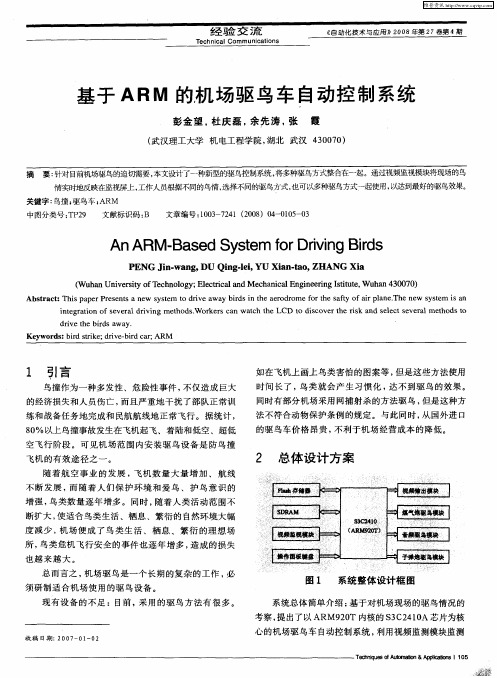
基于ARM的机场驱鸟车自动控制系统
三星公司的 S DRAM ( S 6 6 2 K4 5 1 3 C)的外部同步 时钟 s l u v可在 一定的频率 范围 内连续变化 , 高频 率可 最
达到 1 3 3 MHz 每 块 S , DRAM 内含 四个独立 的 B n 它 a k; 的基本 存储 单元都 是按照 阵列排列 的 , 的数据位 宽和 它
系统整体 设计框 图
系统总 体简单 介绍 : 于对 机场现 场 的驱 鸟情 况的 基 考察 , 出了以 ARM9 0 提 2 T内核的 ¥ C 4 0 3 2 1 A芯片为核 心 的机场驱 鸟 车 自动控 制系统 , 利用视频 监测模 块监测
收 稿 日期 : 0 —0 —0 2 7 1 0 2
1 引 言
鸟撞作为 一种多 发性 、危 险性 事 件 , 不仅造 成 巨大 的经济损 失和人员 伤亡 , 而且 严重地 干扰 了部 队正常训 练 和战备 任务地 完成和 民航航 线地 正常 飞行 。据 统计 , 8 %以上 鸟撞事故发生在 飞机起 飞 、着 陆和低空 、超低 0 空 飞行 阶段 。可见 机 场范 围 内安 装驱 鸟设 备 是 防 鸟撞 飞 机 的有效 途径 之 一 。 随着 航 空 事业 的 发展 , 飞机 数 量 大 量增 加 、航 线
维普资讯
技 应用 08 第2 卷 期 术与 20 年 第4 7
经 验 交 流
T ch i aICo r e n c m nun c to i a i ns
现 场鸟情 , 组合 控 制声音 驱 鸟 , 气炮 驱 鸟等 多种驱 鸟 煤 方 法 实现 较好 的驱 鸟效 果 。 机 场 工作 人 员在 驱 鸟 车 内通 过 操 作面 板 上 的 键盘
关键字 : 鸟撞 ; 鸟车 ; 驱 ARM 中图分类号 : P 9 T 2 文献标识码 : B 文章编号 :0 3 7 4 (0 8 4 0 0 — 3 10 — 2 1 2 0 )0 — 1 5 0
基于物联网的机场智能驱鸟系统设计
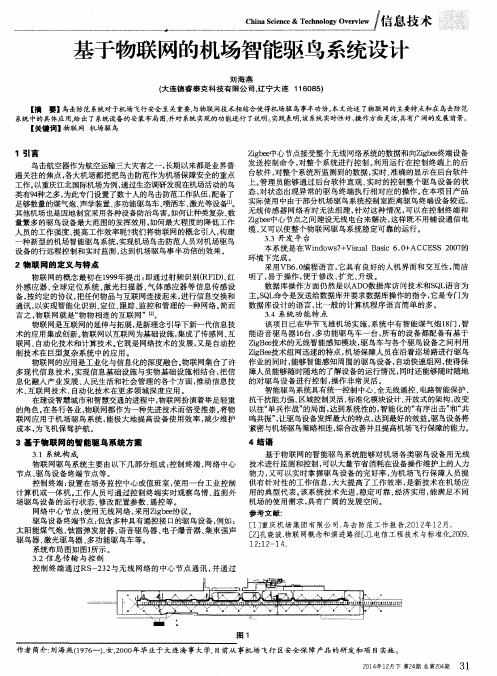
人员的工作强度 、 提高工作效率呢? 我们将物联 网的 概 念引入 , 构建
种新型的机场智 能驱鸟系统, 实现机场鸟击防范人员对机场驱鸟 设备 的行远程控制和实时监测 , 达到机场驱鸟事半功倍 的效果 。
C h i n a S c i e n c e & T e c h n o l o g y O v e r v i的机场智能驱鸟 系统设计
刘 海 燕 ( 大 连 德睿 泰克 科 技 有 限公 司 , 辽 宁大 连 1 1 6 0 8 5 )
【 摘 要】 鸟击防范系统对于机场飞行安全至关重要, 与物联网技术相结合使得机场驱鸟事半功倍。 本文论述 了 物联 网的主要特点和在鸟击防范 系统 中的具体应 用, 给 出 了系统设备 的安装布局 图, 并对 系统 实现的功 能进 行 了说 明。 实践表 明, 该 系统 实时性好、 操作方 面灵活, 具有广 阔的发展 前景 。
【 关键 词 】 物联 网 机 场驱 鸟
1引 言
鸟击航空器作为航空运输三 大灾害之一, 长期以来都是业界普 遍关注的焦点 , 各大机场都 把把 鸟击防范作为机场保障安全 的重点 工作。 以重庆江北 国际机场为例 , 通过生态调研发现在机场活动的鸟 类有9 4 种之多 , 为此专 门设置 了数 十人的鸟击防范工作队伍 , 配备 了 足够数量 的煤气炮 、 声学装置 、 多功能驱鸟车、 喷洒车、 激光等设 。
一
2物 联 网的定 义 与特 点
物联 网的概念最初在 1 9 9 9 年提出 : 即通过射频识别( R F I D) 、 红 外感应器 、 全球定位 系统 、 激光扫描器 、 气体感应器 等信息传感设 备, 按约定 的协议 , 把任何物 品与互联网连接起来 , 进行信息交换和 通讯 , 以实现智能化识别、 定位 、 跟踪、 监控和管理 的一种网络 简而 言之 , 物联 网就是“ 物物相连 的互联 网”[ 2 1 。 物联 网是互联 网的延伸 与拓展 , 是新理念引导 下新一代信息技 术的应用集成创新 。 物联 网以互联网为基础设施 , 集成了传感 网、 互 联网、 自动化技术和计算技术。 它既是网络技术的发展 , 又是 自动控 制技术在 巨型复杂系统 中的应用 。 物联 网的应用是工业化与信息化的深度融合。 物联网集合 了许 多现代信息技术 , 实现信息基础设施与实物基础设施相结合 , 把信 息化融入产业发展 、 人民生活和社 会管理 的各个方 面 , 推动信息 技 术、 互联网技术、 自动化技术在更多领域深度应用 。 在建设智慧城市和智慧交通 的进程 中, 物联网扮演着举足轻重 的角色。 在各行各业 , 物联网都作为一种先进 技术而倍受推崇。 将物 联 网应用于机场驱鸟 系统 , 能极大地提高设备使用效率 , 减少 维护 成本 , 为飞机保驾护航 。
一种机场驱鸟设备声音信号制作方法以及装置
一种机场驱鸟设备声音信号制作方法以及装置
近年来,机场驱鸟设备采用声音信号变得越来越流行,具有驱鸟效果显著而且安全无害的特点,受到机场管理人员的欢迎。
为此,本文介绍了一种机场驱鸟设备声音信号制作方法及装置。
一、机场驱鸟设备声音信号制作方法
1、采用新技术:将直接驱鸟声音设备安装在机场,采用最新的原理和技术,创新工艺,以实现有效的驱鸟效果。
2、声音信号处理:将生物鸟类听到的声音信号精心处理,通过不同的参数不断地变换,结合不同的旋律音,构建出受众最舒心的声音氛围。
3、作出完善的安排:根据此前不同鸟类的评估实验,在驱鸟设备的编程中做出更完善的安排,尤其是将它们与飞机噪音和其他背景噪声进行有效的分离。
二、机场驱鸟设备装置
1、发射装置:主要包括精确、坚固、可靠的电子声辐射发射装置。
2、灵活控制装置:可以做出根据实际活动场景,对声音驱鸟装置做出灵活控制,使其更有效的起到驱鸟的作用。
3、节能供电装置:在辐射装置的设置上做了节能供电设置,使装置具备自然条件下长时间发射的功能。
4、监控装置:专业人员就会通过监控装置来检测机场周围的空气中是否有鸟类,以便及时采取有效的驱鸟措施,防止事故发生。
总之,本文讨论的机场驱鸟设备声音信号制作方法及装置,主要包括以上几方面,旨在提高机场驱鸟效果,保证飞机安全起飞降落,为机场安全运营提供保障。
《面向功能的机场驱鸟ROS软件系统设计》
《面向功能的机场驱鸟ROS软件系统设计》面向功能的机场驱鸟ROS(Robot Operating System)软件系统设计一、引言在现代化机场的运营过程中,驱赶鸟类以确保飞行安全是一项至关重要的任务。
由于鸟类的活动对飞行器造成潜在威胁,设计一款高效、可靠的机场驱鸟软件系统显得尤为重要。
本文将详细介绍面向功能的机场驱鸟ROS软件系统的设计,包括系统需求分析、系统架构设计、功能模块设计、关键技术实现及测试评估等方面。
二、系统需求分析在系统需求分析阶段,我们需要对机场驱鸟软件系统的目标、功能需求及性能需求进行详细分析。
1. 目标:设计一款基于ROS的机场驱鸟软件系统,能够实现对机场区域内鸟类的有效驱赶,降低飞行安全隐患。
2. 功能需求:(1)实时监测机场区域内的鸟类活动;(2)根据监测结果,自动或手动触发驱鸟装置;(3)记录驱鸟数据,包括时间、地点、鸟类种类等;(4)具备友好的人机交互界面,方便用户操作及查看信息。
3. 性能需求:(1)系统应具备高稳定性和低故障率;(2)具备快速响应和实时处理能力;(3)具备可扩展性和可定制性,以适应不同机场的需求。
三、系统架构设计根据需求分析,我们设计了一款基于ROS的机场驱鸟软件系统架构。
该架构主要包括传感器模块、数据处理模块、决策控制模块和人机交互模块。
1. 传感器模块:负责实时监测机场区域内的鸟类活动,通过各类传感器如摄像头、雷达等获取数据。
2. 数据处理模块:对传感器模块获取的数据进行处理和分析,提取出有用的信息,如鸟类种类、数量、位置等。
3. 决策控制模块:根据数据处理模块的结果,结合预设的驱鸟策略,自动或手动触发驱鸟装置,如声音驱鸟器、弹射式驱鸟器等。
4. 人机交互模块:提供友好的人机交互界面,方便用户操作、查看信息及调整系统参数。
四、功能模块设计根据系统架构设计,我们将机场驱鸟软件系统分为以下几个功能模块:1. 传感器数据采集模块:负责与各类传感器进行通信,获取实时的鸟类活动数据。
基于matlab鸟声识别
题目: 基于matlab机场驱鸟装置**: **学院: 工学院专业: 自动化班级: 自动化111学号: ************: ***2014年6月18日基于MATLAB 的机场驱鸟装置指导老师刘璎瑛【摘要】以往在电气自动化专业学生进行毕业设计过程中,常常需要进行大量的数学运算。
在当今计算机时代,通常的做法是借助高级语言Basic、Fortran或C语言等编制计算程序,输入计算机做近似计算。
但是这需要熟练的掌握所运用的语法规则与编制程序的相关规定,而且编制程序不容易,费时费力。
目前,比较流行的控制系统仿真软件是MATLAB。
MATLAB的使用极其容易,不要求使用者具备高深的数学与程序语言的知识,不需要使用者深刻了解算法与编程技巧,且提供了丰富的矩阵处理功能,因此控制理论领域的研究人员很快注意到了这样的特点。
尤其MATLAB应用在电厂自动化专业的毕业设计的计算机仿真上,更体现出它巨大的优越性和简易性。
本设计用电脑录音机采集了一段语音,对其进行了时域分析,频谱分析,分析语音信号的特性。
然后进行相应处理,对比之后判断是否有鸟声。
【关键词】频域; 时域; 滤波器;识别一.Matlab工具的介绍MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。
是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
二.课题的研究意义我们知道小鸟对飞机的影响很大,对飞机造成的损失和危害不可小视。
本次项目内容就是基于matlab设计一个机场驱鸟系统,对机场的声音环境进行实时监测,一旦发现有鸟的叫声则启动报警器,以驱除鸟和提醒工作人员做好相关安全保障工作,确保航班的安全。
基于华北地区机场鸟情状况的驱鸟机器人设计
基于华北地区机场鸟情状况的驱鸟机器人设计第2期(总第213期)2019年4月机械工程与自动化MECHANICALENGINEERING&AUTOMATIONNo.2Apr.文章编号:1672-6413(2019)02-0167-02基于华北地区机场鸟情状况的驱鸟机器人设计张逸鹤(太原国际机场有限责任公司,山西太原030031)摘要:基于对华北地区各机场的鸟类情况和驱鸟手段调研,发现了现有驱鸟工作的盲目性和工作量大的情况,对此,提出了一种多功能驱鸟机器人。
该机器人综合运用了视觉捕捉、声音识别、雷达探测等技术,能够及时发现鸟情,并根据不同鸟情合理选用声音、超声波、激光等刺激方案进行驱鸟,避免了驱鸟的盲目性,尤其是智能行走系统和物联网技术的加入,在提高驱鸟效果的同时降低了驱鸟工作的强度。
同时,驱鸟机器人系统操作简便易上手,具有一定的市场价值和可推广性。
关键词:机场;驱鸟机器人;设计中图分类号:TP242.6文献标识码:A收稿日期:2019-01-30;修订日期:2019-02-15作者简介:张逸鹤(1990-),男,山西沁水人,本科,双学士学位,主要从事飞行区管理方面的工作。
0引言我国航空事业近年来发展迅速,航班运营次数逐年增加,航空事故的危害已引起人们更多的关注。
其中,鸟撞飞机就是影响航空安全的主要事故之一,其主要发生在起飞和降落等低空飞行阶段,机场驱鸟是防止鸟撞发生的有效手段之一,已成为机场工作的一项重要内容[1]。
自20世纪90年代起,人们开始尝试各种驱鸟方法,设置稻草人、鸣枪、放炮、喷洒驱鸟剂甚至驯化驱鸟猎鹰等,以确保机场安全,但是这些方法存在有效时间短、作用范围小的缺点。
随着科技的发展,激光枪、声波驱散器、苍鹰机器人等设备在机场被逐渐使用,这些设备虽提高了有效时间和作用范围,但是作用单一、需耗费大量人力,或是价格昂贵、针对性不强,使得驱鸟工作具有盲目性[2]。
为此,本文根据华北地区机场现有鸟类活动的特点,提出一种多功能的驱鸟机器人,综合运用视觉捕捉、声音识别、雷达探测等技术,对机场鸟情进行识别,运用声音、超声波、激光等多项驱鸟技术有针对性地进行驱鸟[3];同时加入了智能行走系统和物联网功能,可多机器人协调进行驱鸟,提高了机场驱鸟的效率和效果,也提高了其自动化和智能化水平。
基于ARM、ZigBee技术的机场智能化驱鸟系统设计

基于ARM、ZigBee技术的机场智能化驱鸟系统设计赵超;陈寿元;邵增珍【摘要】介绍了一种基于ARM、ZigBee技术的机场智能化防鸟撞驱鸟系统.该系统采用无线监测网络结合上位机监控管理中心框架,采用低功耗控制芯片STM32Fl03RBT、Maxstream公司的XBee模块、短波数传电台TDX-868A,融合无线传感器网络、GPS技术、电子罗盘和ARM等工控领域的技术,采用星型网络的拓扑结构,实现了对机场区域的鸟情监测,利用数据挖掘技术,对鸟情信息进行数据分析,预报鸟情,从根本上防止鸟撞事故的发生.%A ARM ZigBee technology airport intelligent anti-bird strike bird is introduced. The system uses a wireless monitoring network combined with the the PC monitoring center framework, the use of low-power control chip STM32F103RBT, the Maxstream company XBee module, shortwave data transmission radio TDX-868A, the integration of wireless sensor networks, GPS technology, electronic compass and ARM IPC the field of technology, using a star network topology, bird Surveillance in the airport area, using data mining techniques of bird intelligence information, data analysis, forecasting birds love, fundamentally prevent bird strike accidents.【期刊名称】《电子设计工程》【年(卷),期】2013(021)008【总页数】4页(P184-187)【关键词】ARM;ZigBee网络;GPS;数据挖掘【作者】赵超;陈寿元;邵增珍【作者单位】山东师范大学信息科学与工程学院,山东济南250014【正文语种】中文【中图分类】TN92鸟撞指鸟与飞机在空中相撞造成的飞行事故,具有多发性和突发性,一旦发生会使飞机受损,重者可使发动机失去动力,甚至飞机坠毁,造成重大人员伤亡[1]。
数字化机场鸟情预警系统

SYSTEM INTRODUCTION
06 功能实现
FUNCTION IMPLEMENTATION
IIIIIIIIIIIIIIIIIIIIIII
系统概述
系统概述
鸟撞问题已成为影响世界航空安全的重要因素。不论是军用飞机还 是民用飞机,鸟撞问题都是构成航空事故链中的重要一环,它已经成为 航空界公认的严重致灾因素,并被国际航空联合会确定为 A 类安全灾难。 面对日渐复杂的空域危险,防范鸟撞、保障飞行安全成为国际航空界必 须解决的科学难题。研究表明,飞机起降阶段是最容易遭受鸟类撞击的 时段。对鸟情规律进行科学研究,加强科学驱鸟和对鸟情与鸟撞相关性 的预测、预报研究,是有效降低鸟撞发生概率的重要方法。据统计,当 前大多数鸟撞防范措施尚停留“驱赶”层面上,当发现可能马上来临的 潜在危险鸟情时,地勤人员往往采取鸣枪示警、声音恐吓等传统方式驱 赶,这些方法在短时间有一定作用,但其“被动驱赶”的特点使工作人 员无法对鸟情进行提前预测,也就难以提前采取预防措施。
功能实现
鸟情输入
鸟情输入模块是系统对鸟情数据录入的入口模块。这个模块包括根据 图片查询、根据轮廓查询、根据颜色查询、根据数量查询、根据危害查询、 根据食性查询、根据季节查询和根据残骸查询等8个功能项。 ➢ 根据图片查询:图片查询是将现场拍摄的照片,将图片中鸟类特征输
入搜索栏,从所数据库中进行查找。 ➢ 根据轮廓查询:轮廓查询是根据对观察鸟类的轮廓,并将数据与数据
库中记录进行比对查找。 ➢ 根据颜色查询:颜色查询是根据对鸟类的观察,通过对鸟的各部位颜
色数据与数据库中记录进行对比查找。 ➢ 根据数量查询:数量查询是根据对鸟类的观察,通过对鸟的种群数量
与数据库中记录进行对比查找。 ➢ 根据危害查询: 危害查询是根据对鸟类造成的危害情况的描述,与数
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目: 基于matlab机场驱鸟装置**: **学院: 工学院专业: 自动化班级: 自动化111学号: ************: ***2014年6月18日基于MATLAB 的机场驱鸟装置指导老师刘璎瑛【摘要】以往在电气自动化专业学生进行毕业设计过程中,常常需要进行大量的数学运算。
在当今计算机时代,通常的做法是借助高级语言Basic、Fortran或C语言等编制计算程序,输入计算机做近似计算。
但是这需要熟练的掌握所运用的语法规则与编制程序的相关规定,而且编制程序不容易,费时费力。
目前,比较流行的控制系统仿真软件是MATLAB。
MATLAB的使用极其容易,不要求使用者具备高深的数学与程序语言的知识,不需要使用者深刻了解算法与编程技巧,且提供了丰富的矩阵处理功能,因此控制理论领域的研究人员很快注意到了这样的特点。
尤其MATLAB应用在电厂自动化专业的毕业设计的计算机仿真上,更体现出它巨大的优越性和简易性。
本设计用电脑录音机采集了一段语音,对其进行了时域分析,频谱分析,分析语音信号的特性。
然后进行相应处理,对比之后判断是否有鸟声。
【关键词】频域; 时域; 滤波器;识别一.Matlab工具的介绍MATLAB是matrix&laboratory两个词的组合,意为矩阵工厂(矩阵实验室)。
是由美国mathworks公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。
它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。
二.课题的研究意义我们知道小鸟对飞机的影响很大,对飞机造成的损失和危害不可小视。
本次项目内容就是基于matlab设计一个机场驱鸟系统,对机场的声音环境进行实时监测,一旦发现有鸟的叫声则启动报警器,以驱除鸟和提醒工作人员做好相关安全保障工作,确保航班的安全。
三.课题的实现方法通过应用matlab,布局GUI界面,关联对应的m文件。
首先我们要选取一个典型的鸟叫声音,通过画出它的时域图和频谱图,由相关的m文件提取它的一些参数特性作为模板。
然后我们设置一个带通滤波器,将采集到的声音通过滤波器,与模板进行比较,如果与模板的误差在一定范围之内,则表示有鸟叫的声音,此时进行报警。
四.相关GUI界面图览1.有鸟声时识别:图①采集声音滤波前与模板比较图②采集声音滤波后与模板比较1.无鸟声时识别:图③采集声音滤波前与模板比较图④采集声音滤波前与模板比较通过这四张图比较知道,只有周围有鸟声,并且把采集到的鸟声滤波之后,与模板比较才能识别出来。
五.本人负责相关部分任务:语音识别(注:鉴于语音识别这块较为繁杂,故与喻金标同学一起完成)附加程序:1.识别主函数Shibiezhu.mfunction finalmsg = test()k=128;fs=50000;[m1, fs] = wavread('E:\e1.wav');[m2, fs] = wavread('E:\e2.wav');[m3, fs] = wavread('E:\e3.wav');[ce, fs] = wavread('D:\ssssss\bbb\bin\xm2\AA.wav');mm1 = mfcc(m1, fs); % 计算 MFCC's 提取特征特征,返回值是Mel倒谱系数,是一个log的dct得到的code1= Vqlbg(mm1, k);mm2 = mfcc(m2, fs); % 计算 MFCC's 提取特征特征,返回值是Mel倒谱系数,是一个log的dct得到的code2= Vqlbg(mm2, k);mm3 = mfcc(m3, fs); % 计算 MFCC's 提取特征特征,返回值是Mel倒谱系数,是一个log的dct得到的code3= Vqlbg(mm3, k);cce = mfcc(ce, fs); % 得到测试人语音的mel倒谱系数d1 = Disteu(cce, code1); %计算得到模板和要判断的声音之间的“距离”dist1 = sum(min(d1,[],2)) / size(d1,1); %变换得到一个距离的量 d2 = Disteu(cce, code2); %计算得到模板和要判断的声音之间的“距离”dist2 = sum(min(d2,[],2)) / size(d2,1); %变换得到一个距离的量 d3 = Disteu(cce, code3); %计算得到模板和要判断的声音之间的“距离”dist3 = sum(min(d3,[],2)) / size(d3,1); %变换得到一个距离的量 %测试阈值数量msgc1 = sprintf('与模板语音信号的差值为:%10f', dist1);msgc2 = sprintf('与模板语音信号的差值为:%10f', dist2);msgc3 = sprintf('与模板语音信号的差值为:%10f', dist3);disp(msgc1);disp(msgc2);disp(msgc3);distmin=0;distmax=5;ifdist1>distmin&dist1<distmax|dist2>distmin&dist2<distmax|dist3>dis tmin&dist3<distmaxmsgc1 = sprintf('有鸟叫');msgbox(msgc1);[bj, fs] = wavread('E:\baojing.wav');sound(bj,fs);elsemsgc2 = sprintf('没有鸟叫');msgbox(msgc2);end2.特征提取函数mfcc.mfunction r = mfcc(s, fs)m = 100;n = 256;l = length(s);nbFrame = floor((l - n) / m) + 1; %沿-∞方向取整for i = 1:nfor j = 1:nbFrameM(i, j) = s(((j - 1) * m) + i); %对矩阵M赋值endendh = hamming(n); %加 hamming 窗,以增加音框左端和右端的连续性M2 = diag(h) * M;for i = 1:nbFrameframe(:,i) = fft(M2(:, i)); %对信号进行快速傅里叶变换FFTendt = n / 2;tmax = l / fs;m = Melfb(20, n, fs); %将上述线性频谱通过Mel 频率滤波器组得到Mel 频谱,下面在将其转化成对数频谱n2 = 1 + floor(n / 2);z = m * abs(frame(1:n2, :)).^2;r = dct(log(z));3.计算距离函数Disteu.mfunction d = disteu(x, y)[M, N] = size(x); %音频x赋值给【M,N】[M2, P] = size(y); %音频y赋值给【M2,P】if (M ~= M2)error('不匹配!') %两个音频时间长度不相等endd = zeros(N, P);if (N < P)%在两个音频时间长度相等的前提下copies = zeros(1,P);for n = 1:Nd(n,:) = sum((x(:, n+copies) - y) .^2, 1);endelsecopies = zeros(1,N);for p = 1:Pd(:,p) = sum((x - y(:, p+copies)) .^2, 1)';end%%成对欧氏距离的两个矩阵的列之间的距离endd = d.^0.5;4.特征提取辅助函数vqlbg.mfunction r = vqlbg(d,k)e = .01;r = mean(d, 2);dpr = 10000;for i = 1:log2(k)r = [r*(1+e), r*(1-e)];while (1== 1)z = Disteu(d, r);[m,ind] = min(z, [], 2);t = 0;for j = 1:2^ir(:, j) = mean(d(:, find(ind == j)), 2);x = Disteu(d(:, find(ind == j)), r(:, j));for q = 1:length(x)t = t + x(q);endendif (((dpr - t)/t) < e)break;elsedpr = t;endendend6.Mel滤波器组函数melfb.mfunction m = melfb(p, n, fs)f0 = 700 / fs;fn2 = floor(n/2);lr = log(1 + 0.5/f0) / (p+1);% convert to fft bin numbers with 0 for DC termbl = n * (f0 * (exp([0 1 p p+1] * lr) - 1));b1 = floor(bl(1)) + 1;b2 = ceil(bl(2));b3 = floor(bl(3));b4 = min(fn2, ceil(bl(4))) - 1;pf = log(1 + (b1:b4)/n/f0) / lr;fp = floor(pf);pm = pf - fp;r = [fp(b2:b4) 1+fp(1:b3)];c = [b2:b4 1:b3] + 1;v = 2 * [1-pm(b2:b4) pm(1:b3)];m = sparse(r, c, v, p, 1+fn2);主函数:function varargout = xm2(varargin)gui_Singleton = 1;gui_State = struct('gui_Name', mfilename, ...'gui_Singleton', gui_Singleton, ...'gui_OpeningFcn', @xm2_OpeningFcn, ...'gui_OutputFcn', @xm2_OutputFcn, ...'gui_LayoutFcn', [] , ...'gui_Callback', []);if nargin && ischar(varargin{1})gui_State.gui_Callback = str2func(varargin{1});endif nargout[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); elsegui_mainfcn(gui_State, varargin{:});end% End initialization code - DO NOT EDIT% --- Executes just before xm2 is made visible.function xm2_OpeningFcn(hObject, eventdata, handles, varargin)% This function has no output args, see OutputFcn.% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB % handles structure with handles and user data (see GUIDATA)% varargin command line arguments to xm2 (see VARARGIN)% Choose default command line output for xm2handles.output = hObject;% Update handles structureguidata(hObject, handles);% UIWAIT makes xm2 wait for user response (see UIRESUME)% uiwait(handles.figure1);% --- Outputs from this function are returned to the command line. function varargout = xm2_OutputFcn(hObject, eventdata, handles)% varargout cell array for returning output args (see VARARGOUT);% hObject handle to figure% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)% Get default command line output from handles structurevarargout{1} = handles.output;% --- Executes on button press in yuansheng.function yuansheng_Callback(hObject, eventdata, handles)% hObject handle to yuansheng (see GCBO)% eventdata reserved - to be defined in a future version of MATLAB% handles structure with handles and user data (see GUIDATA)fs=50000;%x1=wavread('E:\b.wav');[k1, fs] = wavread('E:\moban.wav');% [k2, fs] = wavread('E:\e2.wav');% [k3, fs] = wavread('E:\e3.wav');% [k4, fs] = wavread('E:\e4.wav');% [k5, fs] = wavread('E:\e5.wav');sound(k1,fs);%t=(0:length(x)-1)/fs;%计算样本时刻y1=fft(k1,50000);%X=fft(x.*hamming (length (x)));%fm=5000*length(X)/fs; %限定频率范围%f=(0:fm)*fs/length (x); %确定频率刻度axes(handles.zuobiaoa);plot(k1);axes(handles.zuobiaob);pinpu=plot(abs(y1));function tuichu_Callback(hObject, eventdata, handles)close(gcf);function caijibofang_Callback(hObject, eventdata, handles)fs=50000;[x,fs,bits]=wavread('D:\ssssss\bbb\bin\xm2\AA.wav'); %读取语音信号的数据,赋给变量xsound(x,fs);y1=fft(x,50000);axes(handles.zuobiaoc);plot(x);axes(handles.zuobiaod);pinpu=plot(abs(y1));function lvbo_Callback(hObject, eventdata, handles)lvbo;function luyin_Callback(hObject, eventdata, handles)Fs=50000;y=wavrecord(5*Fs,Fs,'int16');wavwrite(y,Fs,'AA');function shibie_Callback(hObject, eventdata, handles) shibiezhu;滤波函数lvbo.mfp=[2800 3800];fs=[20 20000];%2500 3000fsa=50000;ap=60;as=250; %50 270wp=fp/fsa*2;ws=fs/fsa*2;[n,wn]=buttord(wp,ws,ap,as);[B,A]=butter(n,wn);% [H,w]=freqz(B,A,512);% plot(w*50000/(2*pi),abs(H)); %[y,fsa,bits]=wavread('D:\ssssss\bbb\bin\xm2\AA.wav');G=filter(B,A,y);Y=fft(G,50000);wavwrite(Y,fsa,'AA');axes(handles.zuobiaoc);plot(G);axes(handles.zuobiaod);plot(abs(Y));function [db,mag,pha,grd,w] = freqz_m(b,a);% Modified version of freqz subroutine% ------------------------------------% [db,mag,pha,grd,w] = freqz_m(b,a);% db = Relative magnitude in dB computed over 0 to pi radians % mag = absolute magnitude computed over 0 to pi radians% pha = Phase response in radians over 0 to pi radians% grd = Group delay over 0 to pi radians% w = 501 frequency samples between 0 to pi radians% b = numerator polynomial of H(z) (for FIR: b=h)% a = denominator polynomial of H(z) (for FIR: a=[1])%[H,w] = freqz(b,a,1000,'whole');H = (H(1:1:501))'; w = (w(1:1:501))';mag = abs(H);db = 20*log10((mag+eps)/max(mag));pha = angle(H);% pha = unwrap(angle(H));grd = grpdelay(b,a,w);% grd = diff(pha);% grd = [grd(1) grd];% grd = [0 grd(1:1:500); grd; grd(2:1:501) 0];% grd = median(grd)*500/pi;GUI界面布局:六.感受1.通过实验,是我对MATLAB有了一个基础的了解,在学习MATLAB编程中需要很多的参考书,要尽量多的熟悉matlab自带的函数及其作用,因为matlab 的自带函数特别多,基本上能够满足一般的数据和矩阵的计算,所以基本上不用你自己编函数。